
Virtual and Physical Prototyping of Reconfigurable Parallel Mechanisms with Single Actuation





Abstract
:1. Introduction
2. Mechanisms Design
3. Mobility Analysis
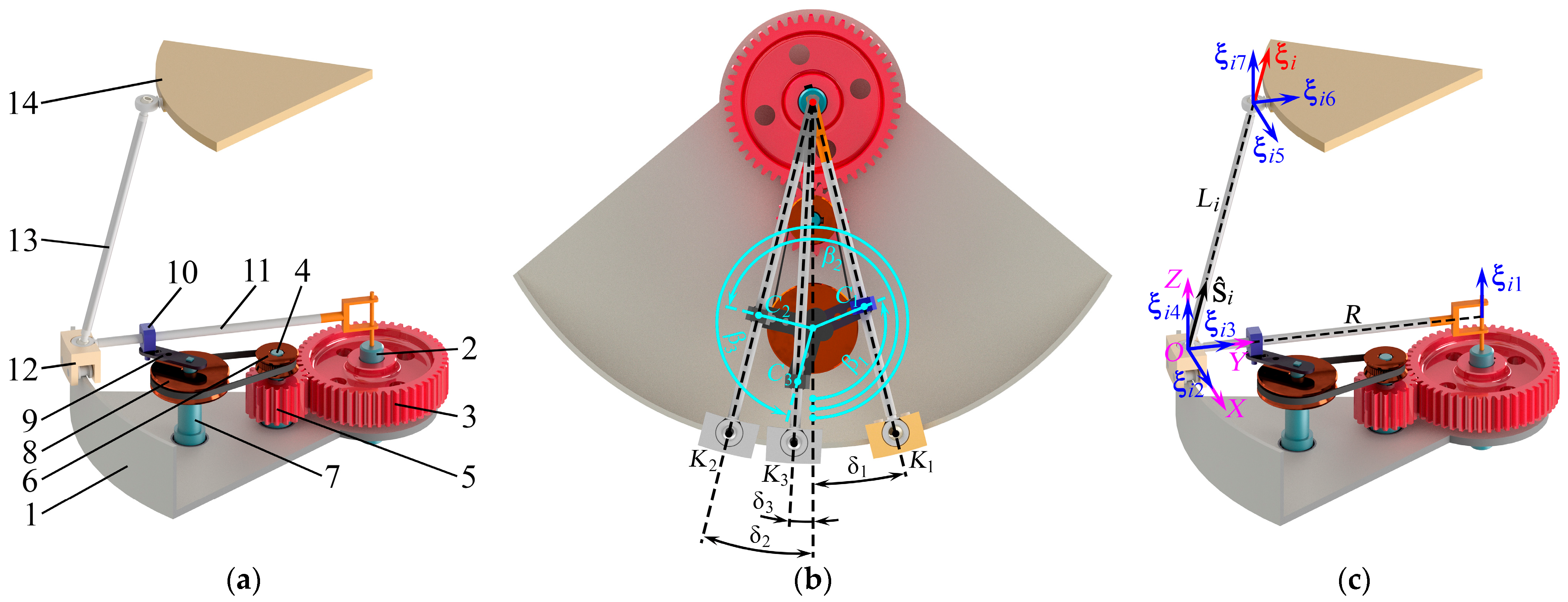
3.1. Analysis for a Single Kinematic Chain
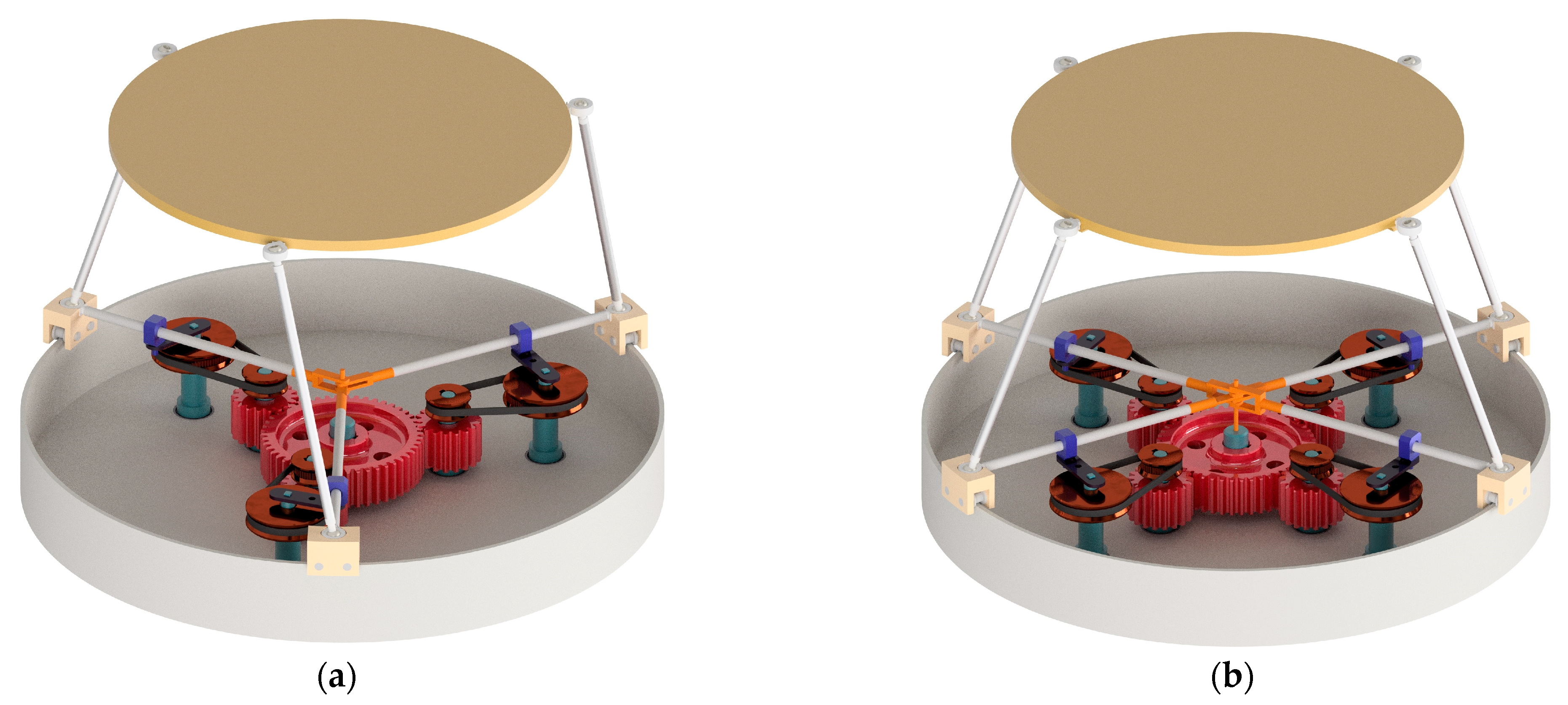
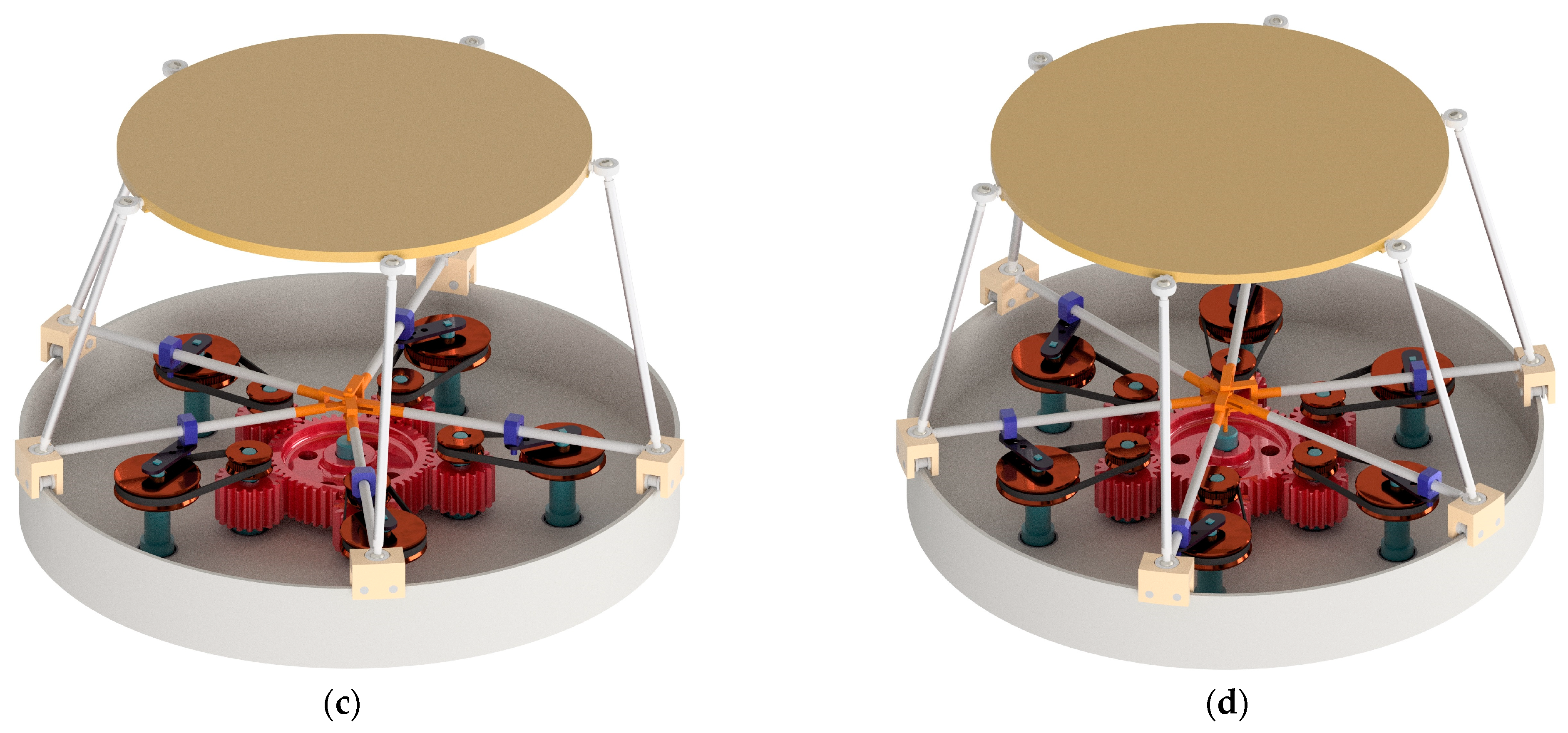
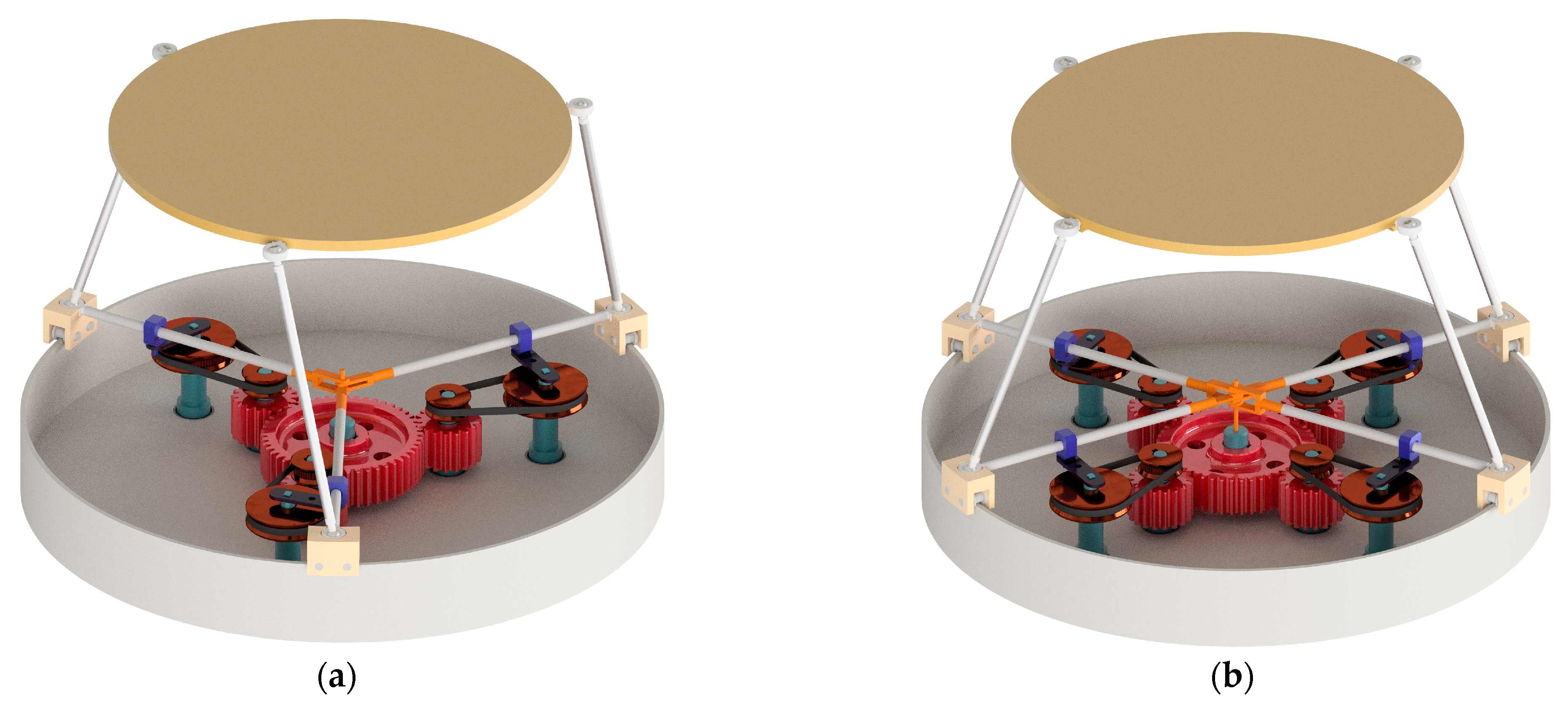
3.2. Analysis for Several Kinematic Chains
4. Virtual and Physical Prototyping
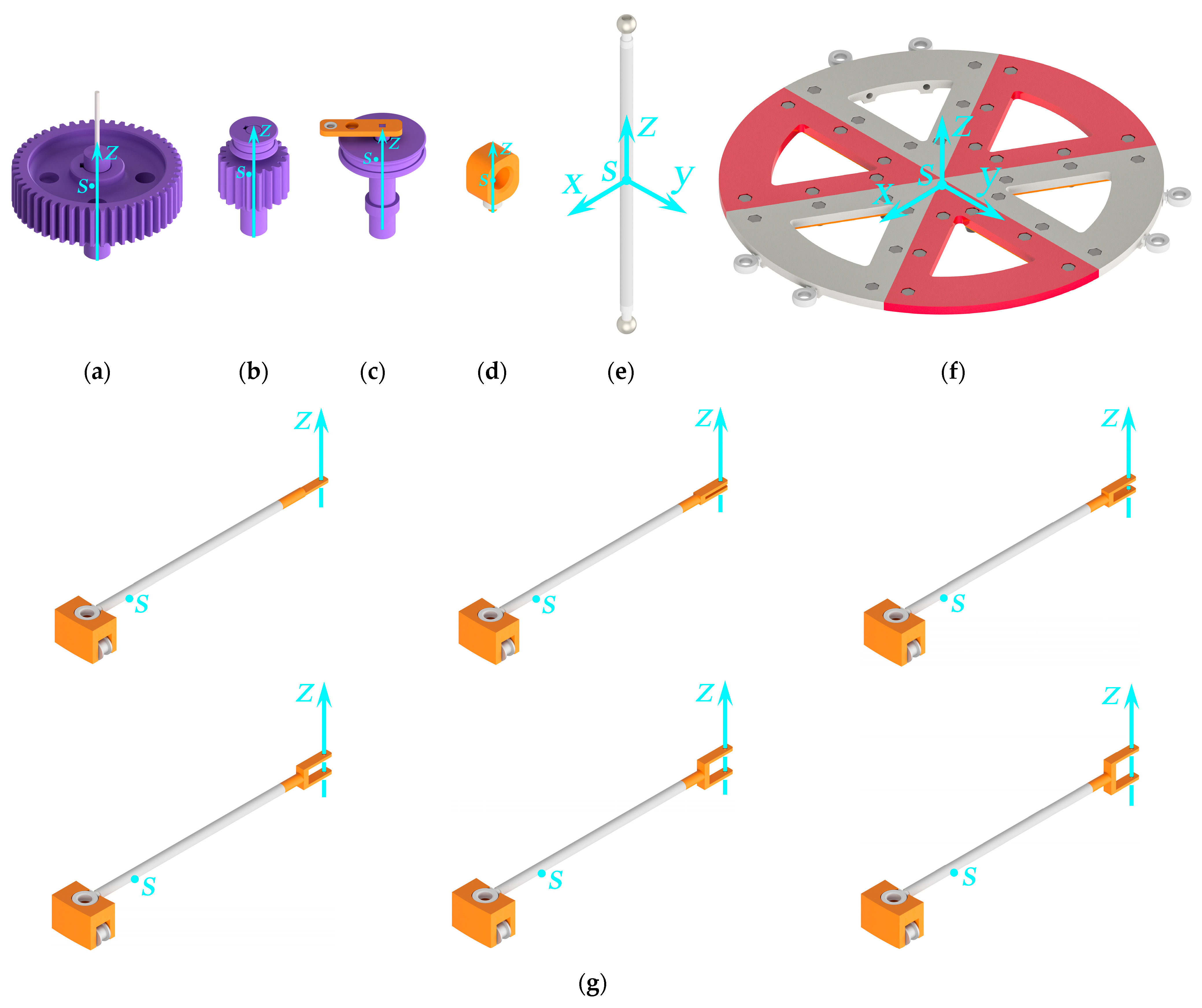
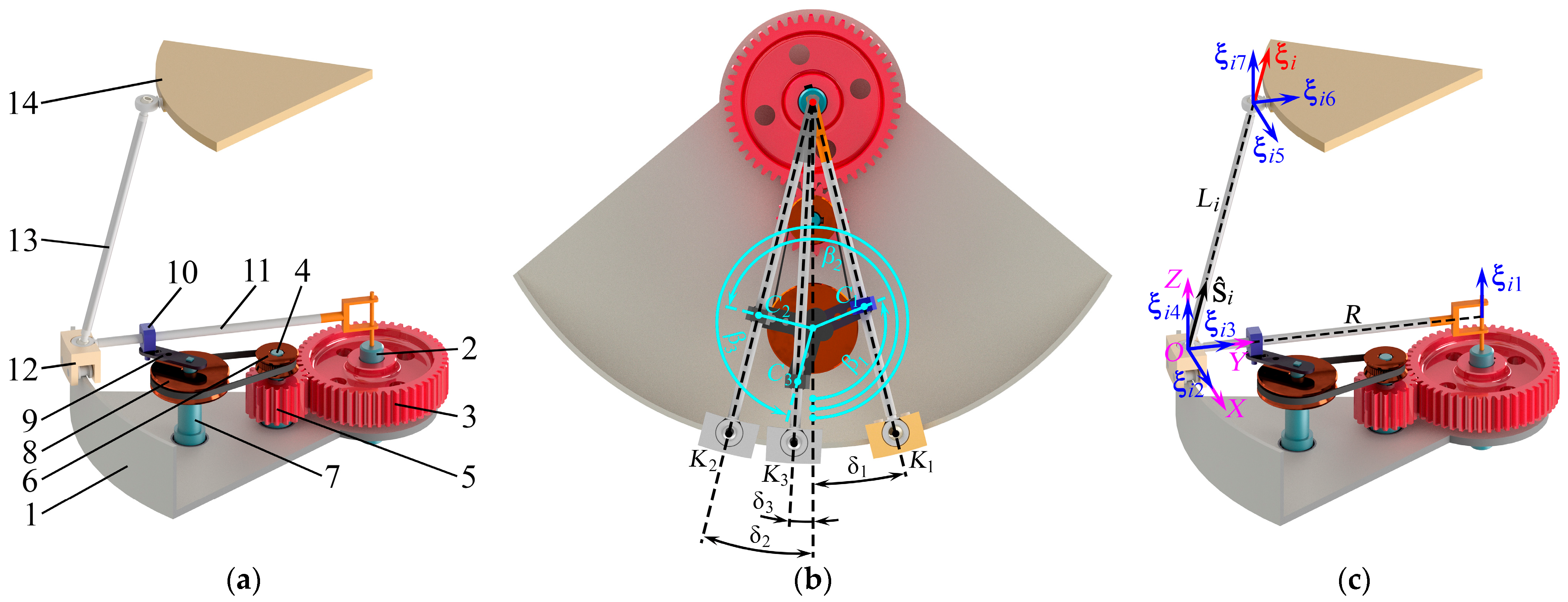
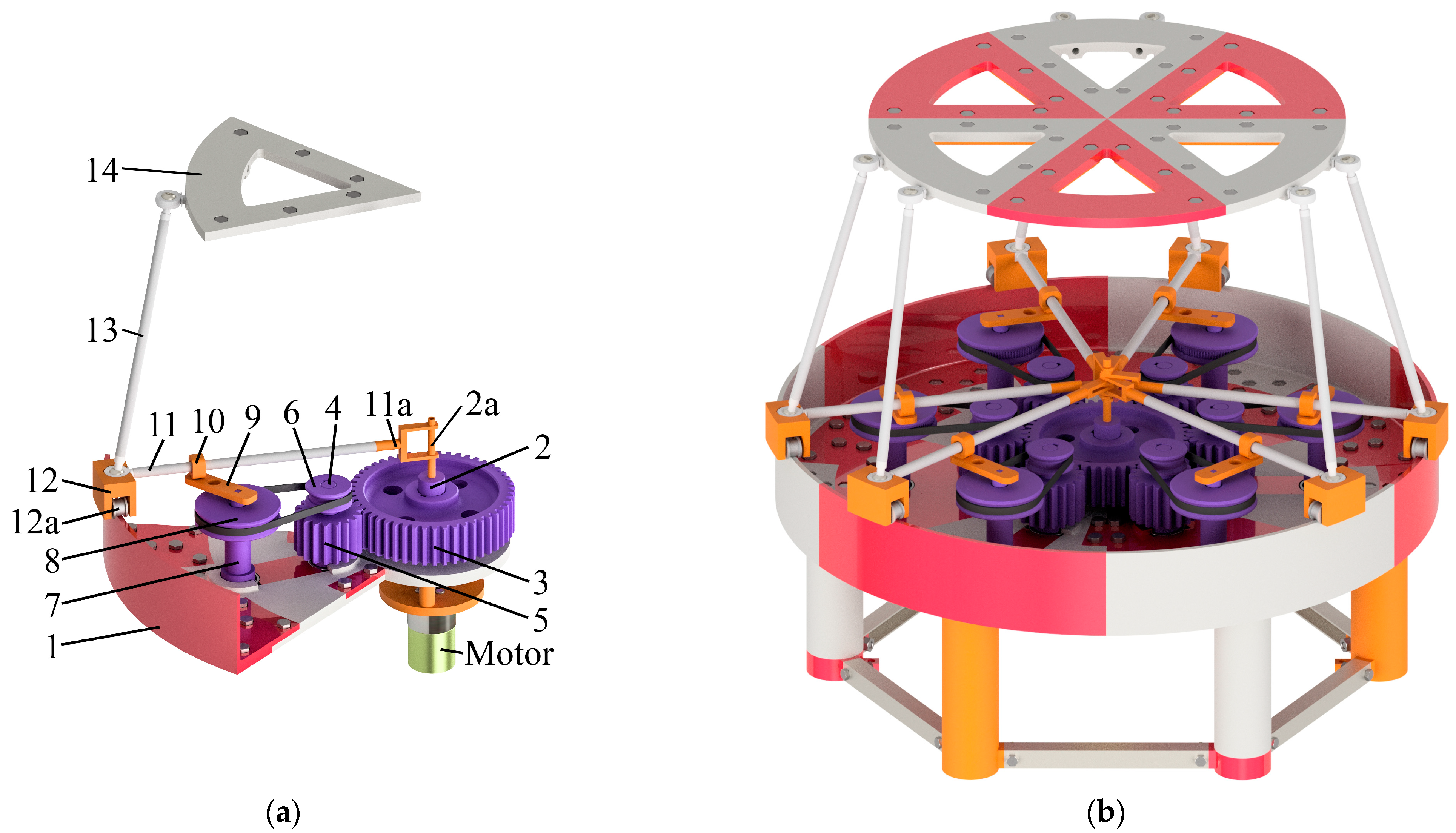
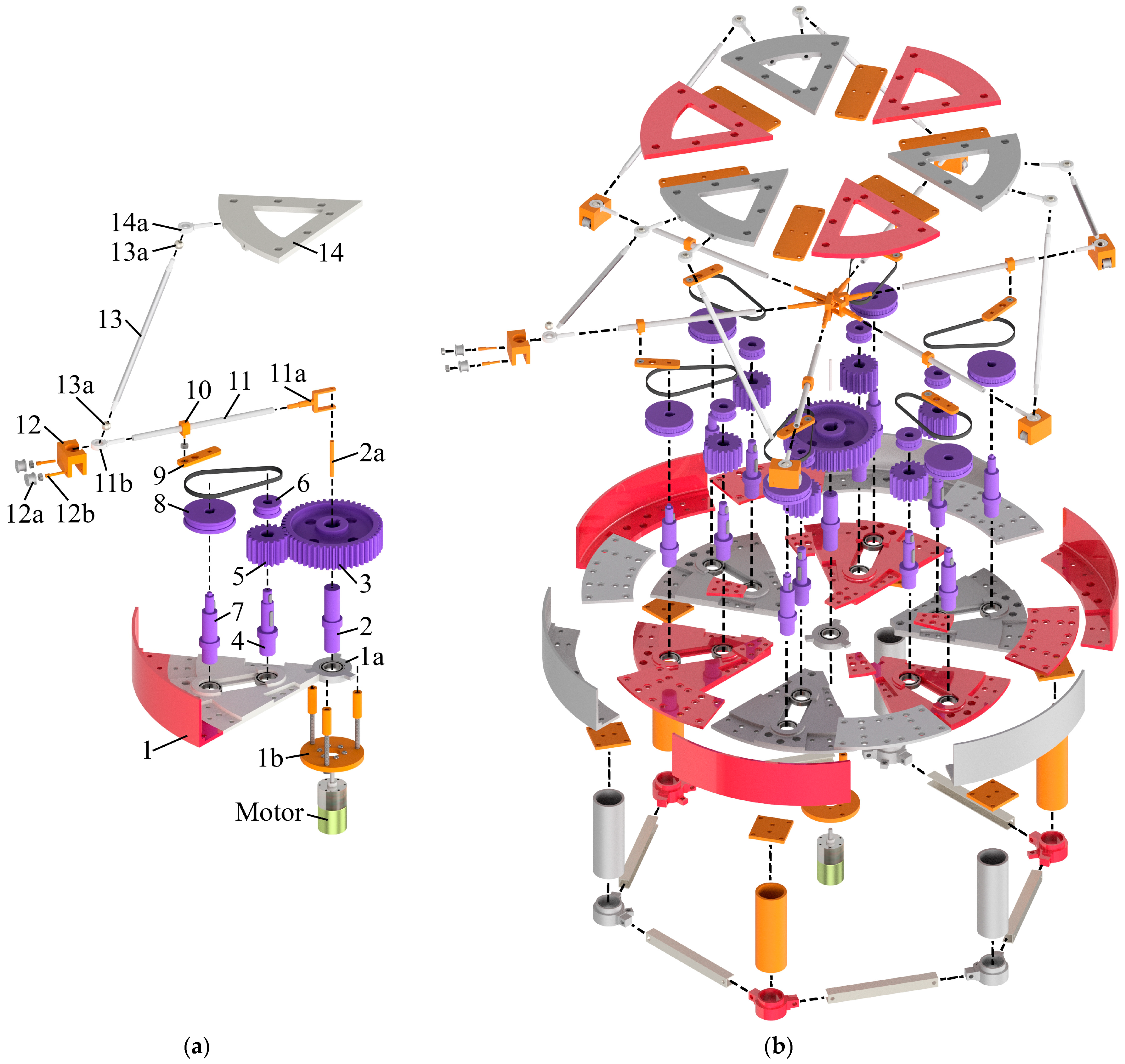
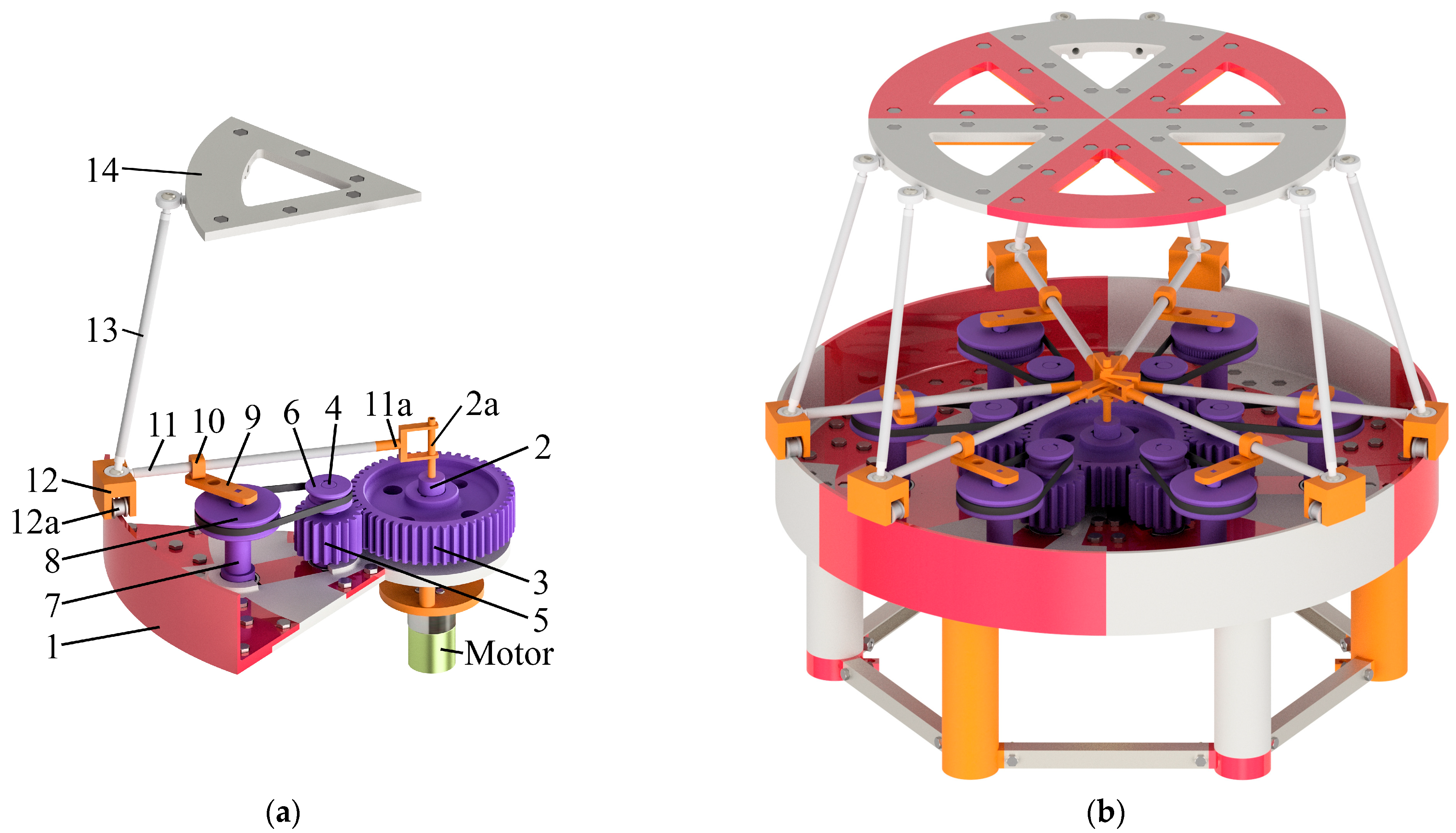
4.1. Development of the Hexapod CAD Model (Virtual Prototyping)
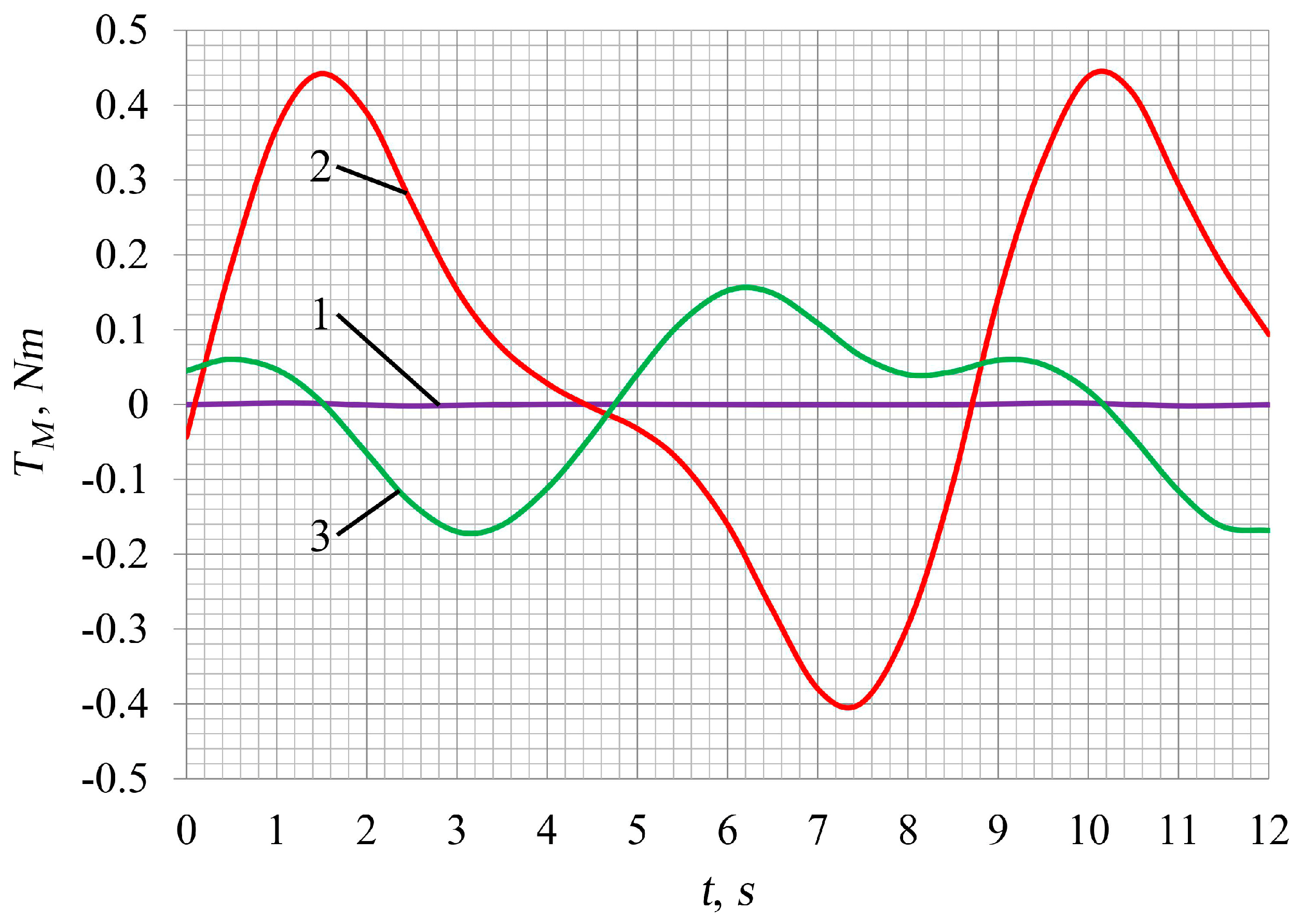
4.2. Kinetostatic Analysis of a Hexapod Using CAD Modeling
- the output link performs a pure rotation around the vertical axis: βi = 255.8°, i = 1…6;
- the output link performs a simultaneous rotation and displacement relative to the vertical axis: β1 = β3 = β5 = 104.2° and β2 = β4 = β6 = 255.8°;
- the output link follows a spatial trajectory changing all six coordinates: β1 = 287.6°, β2 = 103.3°, β3 = 278.4°, β4 = 263.8°, β5 = 260.6°, β6 = 242.4°.
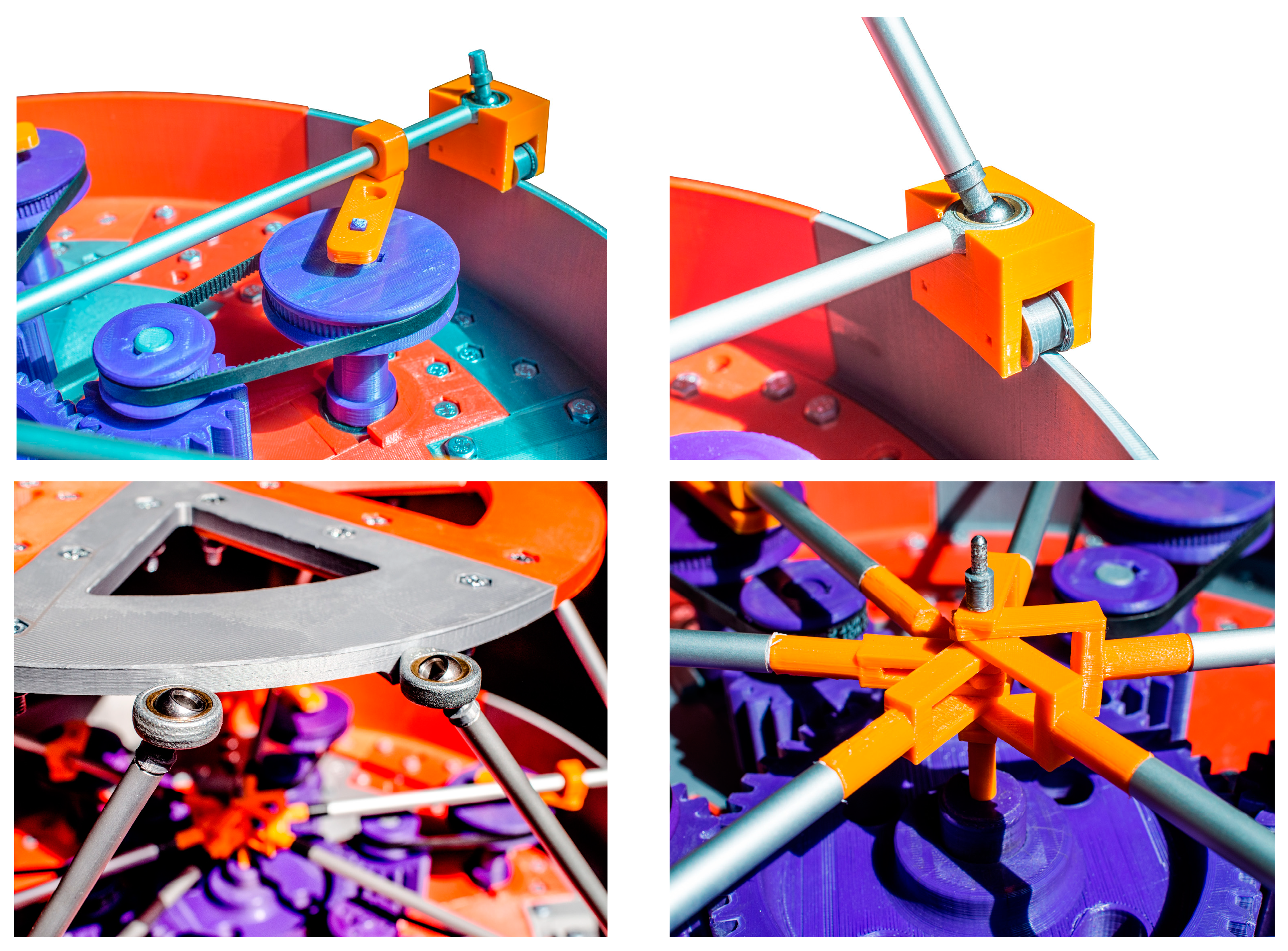
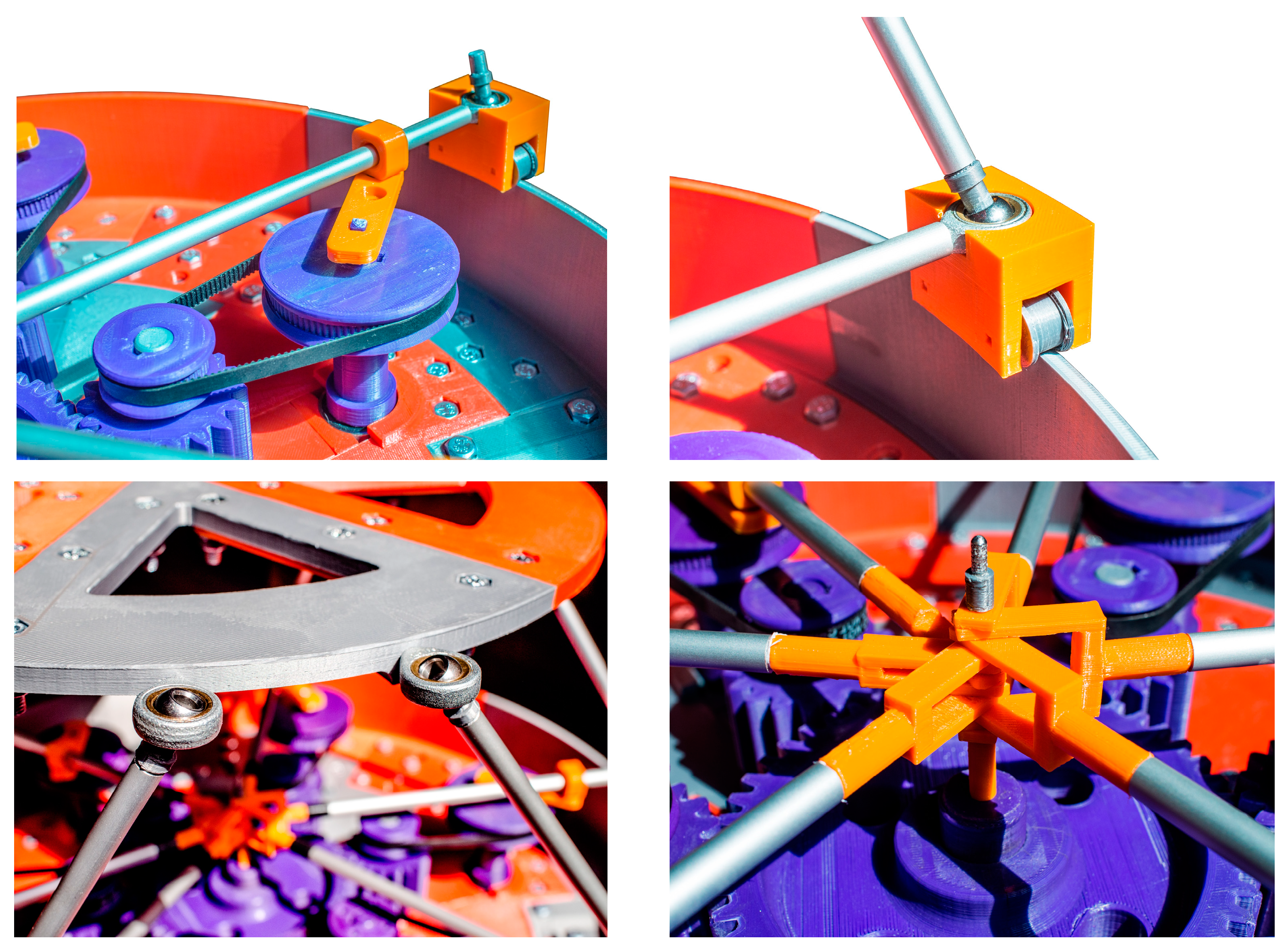
4.3. Development of a Hexapod Full-Scale Model (Physical Prototyping)
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Basics of Instantaneous Screw Theory
Appendix B. Hexapod Elements Geometry
References
- Gibson, I.; Gao, Z.; Campbell, I. A comparative study of virtual prototyping and physical prototyping. Int. J. Manuf. Technol. Manag. 2004, 6, 503–522. [Google Scholar] [CrossRef]
- Chen, L.; Daly, M.C.; Sabelhaus, A.P.; Janse van Vuuren, L.A.; Garnier, H.J.; Verdugo, M.I.; Tang, E.; Spangenberg, C.U.; Ghahani, F.; Agogino, A.M.; et al. Modular elastic lattice platform for rapid prototyping of tensegrity robots. In Proceedings of the ASME 2017 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Volume 5B: 41st Mechanisms and Robotics Conference, Cleveland, OH, USA, 6–9 August 2017. V05BT08A026. [Google Scholar] [CrossRef] [Green Version]
- Wallin, T.J.; Pikul, J.; Shepherd, R.F. 3D printing of soft robotic systems. Nat. Rev. Mater. 2018, 3, 84–100. [Google Scholar] [CrossRef]
- Gul, J.Z.; Sajid, M.; Rehman, M.M.; Siddiqui, G.U.; Shah, I.; Kim, K.-H.; Lee, J.-W.; Choi, K.H. 3D printing for soft robotics—A review. Sci. Technol. Adv. Mater. 2018, 19, 243–262. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Skylar-Scott, M.A.; Mueller, J.; Visser, C.W.; Lewis, J.A. Voxelated soft matter via multimaterial multinozzle 3D printing. Nature 2019, 575, 330–335. [Google Scholar] [CrossRef]
- Lapeyre, M.; Rouanet, P.; Grizou, J.; Nguyen, S.; Depraetre, F.; Le Falher, A.; Oudeyer, P.-Y. Poppy Project: Open-Source fabrication of 3D printed humanoid robot for science, education and art. In Proceedings of the Digital Intelligence, Nantes, France, 17–19 September 2014. [Google Scholar]
- Chavdarov, I.; Nikolov, V.; Naydenov, B.; Boiadjiev, G. Design and control of an educational redundant 3D printed robot. In Proceedings of the 2019 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 19–21 September 2019. [Google Scholar] [CrossRef]
- Ficht, G.; Farazi, H.; Brandenburger, A.; Rodriguez, D.; Pavlichenko, D.; Allgeuer, P.; Hosseini, M.; Behnke, S. NimbRo-OP2X: Adult-sized open-source 3D printed humanoid robot. In Proceedings of the 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China, 6–9 November 2018; pp. 1–9. [Google Scholar] [CrossRef] [Green Version]
- Yao, J.; Zhang, H.; Xiang, X.; Bai, H.; Zhao, Y. A 3-D printed redundant six-component force sensor with eight parallel limbs. Sens. Actuator A Phys. 2016, 247, 90–97. [Google Scholar] [CrossRef]
- Rahul, K.; Raheman, H.; Paradkar, V. Design and development of a 5R 2DOF parallel robot arm for handling paper pot seedlings in a vegetable transplanter. Comput. Electron. Agric. 2019, 166, 105014. [Google Scholar] [CrossRef]
- Pham, M.T.; Teo, T.J.; Yeo, S.H.; Wang, P.; Nai, M.L.S. A 3-D printed Ti-6Al-4V 3-DOF compliant parallel mechanism for high precision manipulation. IEEE/ASME Trans. Mechatron. 2017, 22, 2359–2368. [Google Scholar] [CrossRef]
- Tursynbek, I.; Niyetkaliye, A.; Shintemirov, A. Computation of unique kinematic solutions of a spherical parallel manipulator with coaxial input shafts. In Proceedings of the 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE), Vancouver, BC, Canada, 22–26 August 2019; pp. 1524–1531. [Google Scholar] [CrossRef]
- Leal-Naranjo, J.-A.; Ceccarelli, M.; Torres-San-Miguel, C.-R.; Aguilar-Perez, L.-A.; Urriolagoitia-Sosa, G.; Urriolagoitia-Calderón, G. Multi-objective optimization of a parallel manipulator for the design of a prosthetic arm using genetic algorithms. Lat. Am. J. Solids Struct. 2018, 15, e26. [Google Scholar] [CrossRef] [Green Version]
- Saafi, H.; Laribi, M.A.; Arsicault, M.; Zeghloul, S. Optimal design of a new spherical parallel manipulator. In Proceedings of the 2014 23rd International Conference on Robotics in Alpe-Adria-Danube Region (RAAD), Smolenice, Slovakia, 3–5 September 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Grosch, P.; Di Gregorio, R.; Lopez, J.; Thomas, F. Motion planning for a novel reconfigurable parallel manipulator with lockable revolute joints. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010; pp. 4697–4702. [Google Scholar] [CrossRef] [Green Version]
- Russo, M.; Ceccarelli, M. Kinematic design of a tripod parallel mechanism for robotic legs. In Mechanisms, Transmissions and Applications, Proceedings of the Fourth MeTrApp Conference 2017, Poitiers, France, 22–24 May 2017; Dede, M., İtik, M., Lovasz, E.C., Kiper, G., Eds.; Springer: Cham, Switzerland, 2018; pp. 121–130. [Google Scholar] [CrossRef]
- Fanghella, P.; Galletti, C.; Giannotti, E. Parallel robots that change their group of motion. In Advances in Robot Kinematics, Proceedings of the 10th International Symposium on Advances in Robot Kinematics, Ljubljana, Slovenia, 26–29 June 2006; Lenarčič, J., Roth, B., Eds.; Springer: Dordrecht, The Netherlands, 2006; pp. 49–56. [Google Scholar] [CrossRef]
- Ye, W.; Chai, X.; Zhang, K. Kinematic modeling and optimization of a new reconfigurable parallel mechanism. Mech. Mach. Theory 2020, 149, 103850. [Google Scholar] [CrossRef]
- Kong, X.; Gosselin, C.M.; Richard. P. Type synthesis of parallel mechanisms with multiple operation modes. J. Mech. Des. 2007, 129, 595–601. [Google Scholar] [CrossRef]
- Merlet, J.-P. Parallel Robots, 2nd ed.; Springer: Dordrecht, The Netherlands, 2006. [Google Scholar] [CrossRef]
- Ceccarelli, M. Fundamentals of Mechanics of Robotic Manipulation; Springer: Dordrecht, The Netherlands, 2004. [Google Scholar] [CrossRef]
- Kong, X.; Gosselin, C.M. Type Synthesis of Parallel Mechanisms; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar] [CrossRef]
- Zhang, M.; Cao, J.; Zhu, G.; Miao, Q.; Zeng, X.; Xie, S.Q. Reconfigurable workspace and torque capacity of a compliant ankle rehabilitation robot (CARR). Robot. Auton. Syst. 2017, 98, 213–221. [Google Scholar] [CrossRef] [Green Version]
- Herrero, S.; Mannheim, T.; Prause, I.; Pinto, C.; Corves, B.; Altuzarra, O. Enhancing the useful workspace of a reconfigurable parallel manipulator by grasp point optimization. Robot. Comput. Integr. Manuf. 2015, 31 (Suppl. C), 51–60. [Google Scholar] [CrossRef]
- Tian, C.; Fang, Y.; Guo, S.; Qu, H. A class of reconfigurable parallel mechanisms with five-bar metamorphic linkage. Proc. Inst. Mech. Eng. C J. Mech. 2016, 231, 2089–2099. [Google Scholar] [CrossRef]
- Ye, W.; Fang, Y.; Guo, S. Design and analysis of a reconfigurable parallel mechanism for multidirectional additive manufacturing. Mech. Mach. Theory 2017, 112, 307–326. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Xu, L.; Chen, Q.; Ye, W. New family of RPR-equivalent parallel mechanisms: Design and application. Chin. J. Mech. Eng. 2017, 30, 217–221. [Google Scholar] [CrossRef]
- Carbonari, L.; Callegari, M.; Palmieri, G.; Palpacelli, M.-C. A new class of reconfigurable parallel kinematic machines. Mech. Mach. Theory 2014, 79, 173–183. [Google Scholar] [CrossRef]
- Bi, Z.; Wang, L. Optimal design of reconfigurable parallel machining systems. Robot. Comput. Integr. Manuf. 2009, 25, 951–961. [Google Scholar] [CrossRef]
- Huang, G.; Zhang, D.; Guo, S.; Qu, H. Design and optimization of a novel three-dimensional force sensor with parallel structure. Sensors 2018, 18, 2416. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, Z.; Li, Q.; Ding, H. Theory of Parallel Mechanisms; Springer: Dordrecht, The Netherlands, 2013. [Google Scholar] [CrossRef]
- Sun, T.; Yang, S.; Lian, B. Finite and Instantaneous Screw Theory in Robotic Mechanism; Springer: Singapore, 2020. [Google Scholar] [CrossRef]
- Strang, G. Introduction to Linear Algebra, 5th ed.; Wellesley-Cambridge Press: Wellesley, MA, USA, 2016. [Google Scholar]
- Conconi, M.; Carricato, M. A new assessment of singularities of parallel kinematic chains. IEEE Trans. Rob. 2009, 25, 757–770. [Google Scholar] [CrossRef]
- Fomin, A.; Antonov, A.; Glazunov, V. Forward kinematic analysis of a rotary hexapod. In ROMANSY 23-Robot Design, Dynamics and Control, Proceedings of the 23rd CISM IFToMM Symposium, Sapporo, Japan, 20–24 September 2020; Venture, G., Solis, J., Takeda, Y., Konno, A., Eds.; Springer: Cham, Switzerland, 2021; pp. 486–494. [Google Scholar] [CrossRef]
- Fomin, A.; Antonov, A.; Glazunov, V.; Carbone, G. Dimensional (parametric) synthesis of the hexapod-type parallel mechanism with reconfigurable design. Machines 2021, 9, 117. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Kinematic Chains | Number of DOFs of the Output Link | ||
|---|---|---|---|
| Overall | Controllable | Uncontrollable | |
| 3 | 4 | 1 | 3 |
| 4 | 3 | 1 | 2 |
| 5 | 2 | 1 | 1 |
| 6 | 1 | 1 | – |
| Parameter Nomenclature | Dimension |
|---|---|
| Overall dimensions of the hexapod, including the maximum displacements of the platform | 530 mm × 530 mm × 457 mm (LWH dimensions) |
| Column height of circular guide 1 | 143.00 mm |
| Diameter of circular guide 1 | 500.00 mm |
| Height of circular guide 1 | 58.30 mm |
| Pitch diameter of driving wheel 3 | 125.00 mm |
| Number of teeth of driving wheel 3 | 50 |
| Pitch diameter of gear 5 | 45.00 mm |
| Number of teeth of gear 5 | 18 |
| Center distance of gear transmission 3–5 | 85.00 mm |
| Module of gears 3–5 | 2.50 mm |
| Diameter of driving pulley 6 | 30.00 mm |
| Diameter of driven pulley 8 | 60.00 mm |
| Center distance of belt transmission 6–8 | 76.00 mm |
| Length of crank 9 | 38.85 mm |
| Length of swinging arm 11 (distance from the center of circular guide 1 to the center of spherical joint 12–13) | 246.05 mm |
| Length of leg 13 | 220.05 mm |
| Platform radius 14 excluding spherical joints 13–14 | 180.00 mm |
| Platform radius 14 including spherical joints 13–14 (distance from the center of platform 14 to the center of spherical joint 13–14) | 193.00 mm |
| Minimum/maximum angle between paired spherical joints 13–14 | 20°/100° |
| Bearing 1,000,804 (13 pcs) | 20 mm × 32 mm × 7 mm |
| Bearing 623ZZ (18 pcs) | 3 mm × 10 mm × 4 mm |
| Diameter of the sphere in the spherical joints | 12.00 mm |
| Link/Group of Links | Material | Moment of Inertia, kg∙mm2 | Mass, kg | |
|---|---|---|---|---|
| Shaft 2 and driving wheel 3 | Plastic ABS | 494.19 | 0.257 | |
| Shaft 4, gear 5 and driving pulley 6 | Plastic ABS | 20.68 | 0.091 | |
| Shaft 7, driven pulley 8 and crank 9 | Plastic ABS | 32.04 | 0.085 | |
| Slide block 10 | Plastic ABS | 0.061 | 0.003 | |
| Swinging arm 11 (incl. elements 11a,b), and carriage 12 (incl. elements 12a,b) | #1 | Aluminum, plastic ABS, steel | 2545.40 | 0.052 |
| #2 | 2545.66 | 0.052 | ||
| #3 | 2545.76 | 0.053 | ||
| #4 | 2545.87 | 0.053 | ||
| #5 | 2545.80 | 0.053 | ||
| #6 | 2546.09 | 0.053 | ||
| Leg 13 (incl. elements 13a) | Aluminum, plastic ABS, steel | 0.022 | ||
| Platform 14 (incl. elements 14a) | Aluminum, plastic ABS, steel | 1.153 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fomin, A.; Petelin, D.; Antonov, A.; Glazunov, V.; Ceccarelli, M. Virtual and Physical Prototyping of Reconfigurable Parallel Mechanisms with Single Actuation. Appl. Sci. 2021, 11, 7158. https://doi.org/10.3390/app11157158
Fomin A, Petelin D, Antonov A, Glazunov V, Ceccarelli M. Virtual and Physical Prototyping of Reconfigurable Parallel Mechanisms with Single Actuation. Applied Sciences. 2021; 11(15):7158. https://doi.org/10.3390/app11157158
Chicago/Turabian StyleFomin, Alexey, Daniil Petelin, Anton Antonov, Victor Glazunov, and Marco Ceccarelli. 2021. "Virtual and Physical Prototyping of Reconfigurable Parallel Mechanisms with Single Actuation" Applied Sciences 11, no. 15: 7158. https://doi.org/10.3390/app11157158
APA StyleFomin, A., Petelin, D., Antonov, A., Glazunov, V., & Ceccarelli, M. (2021). Virtual and Physical Prototyping of Reconfigurable Parallel Mechanisms with Single Actuation. Applied Sciences, 11(15), 7158. https://doi.org/10.3390/app11157158