
Continuous Control Set Predictive Current Control for Induction Machine



Abstract
:1. Introduction
2. Induction Machine Model
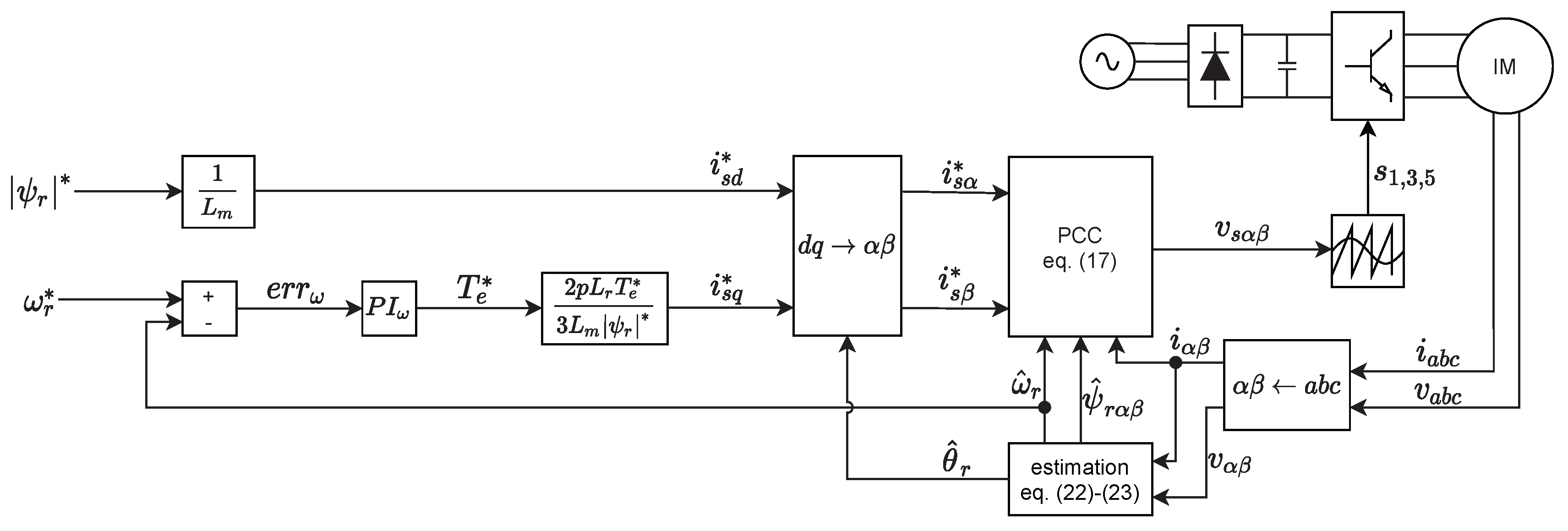
3. Control Structure
3.1. Deriving the Control Algorithm for the Inner Control Loop
3.2. Outer Control Loop Algorithm
3.3. Rotor Flux and Speed Estimation
4. Stability and Controllability of the System
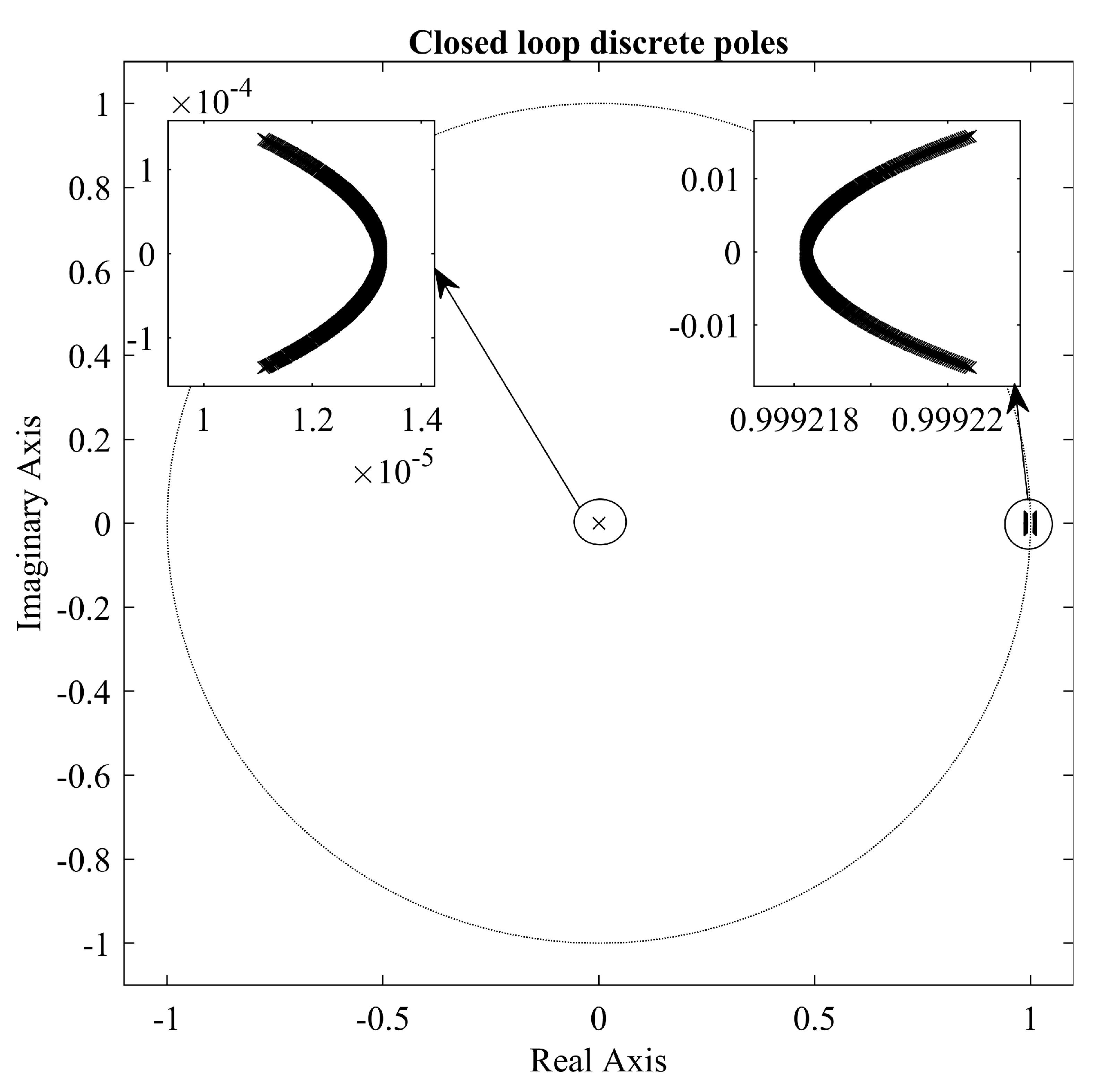
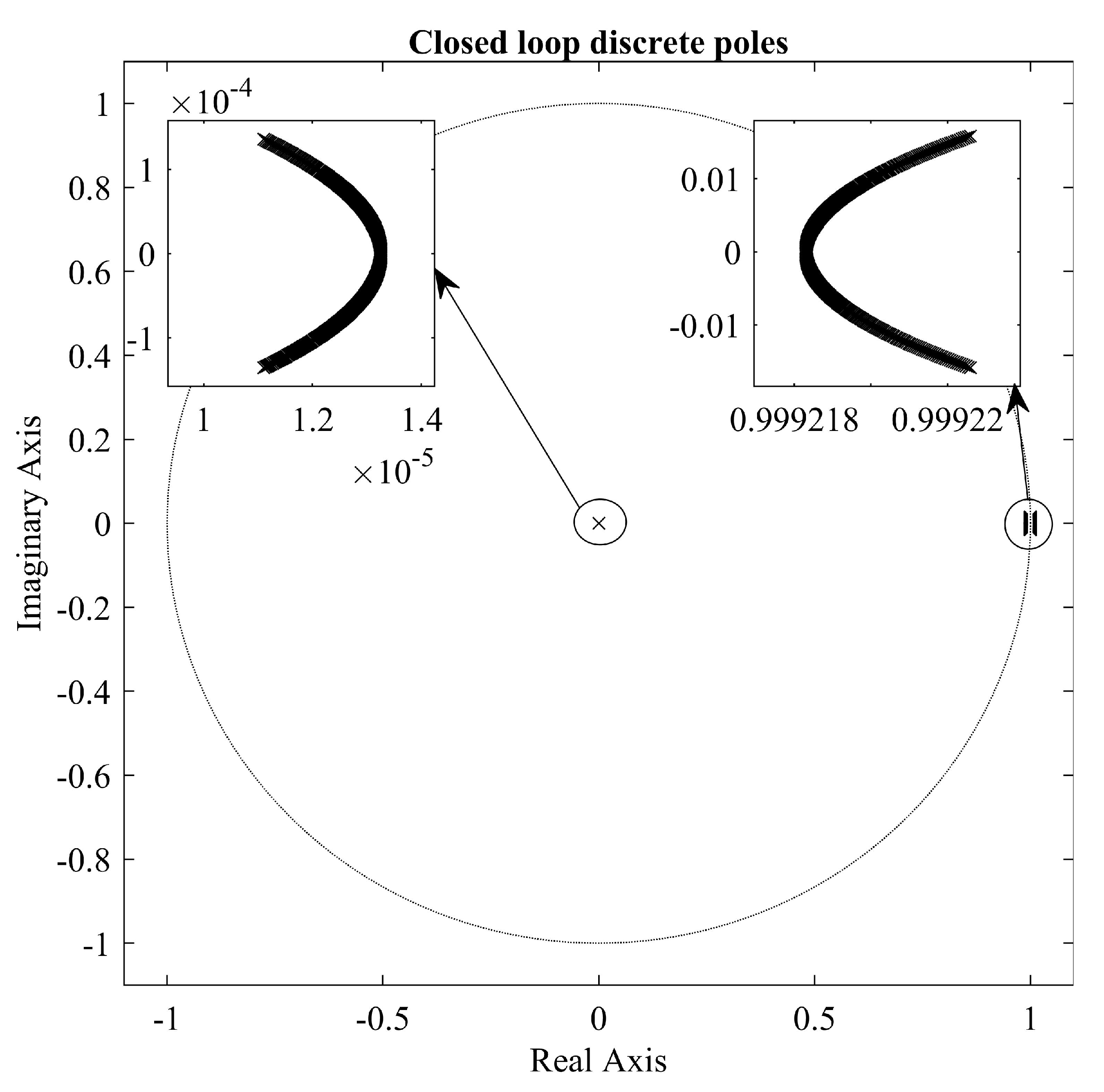
4.1. Stability Analysis
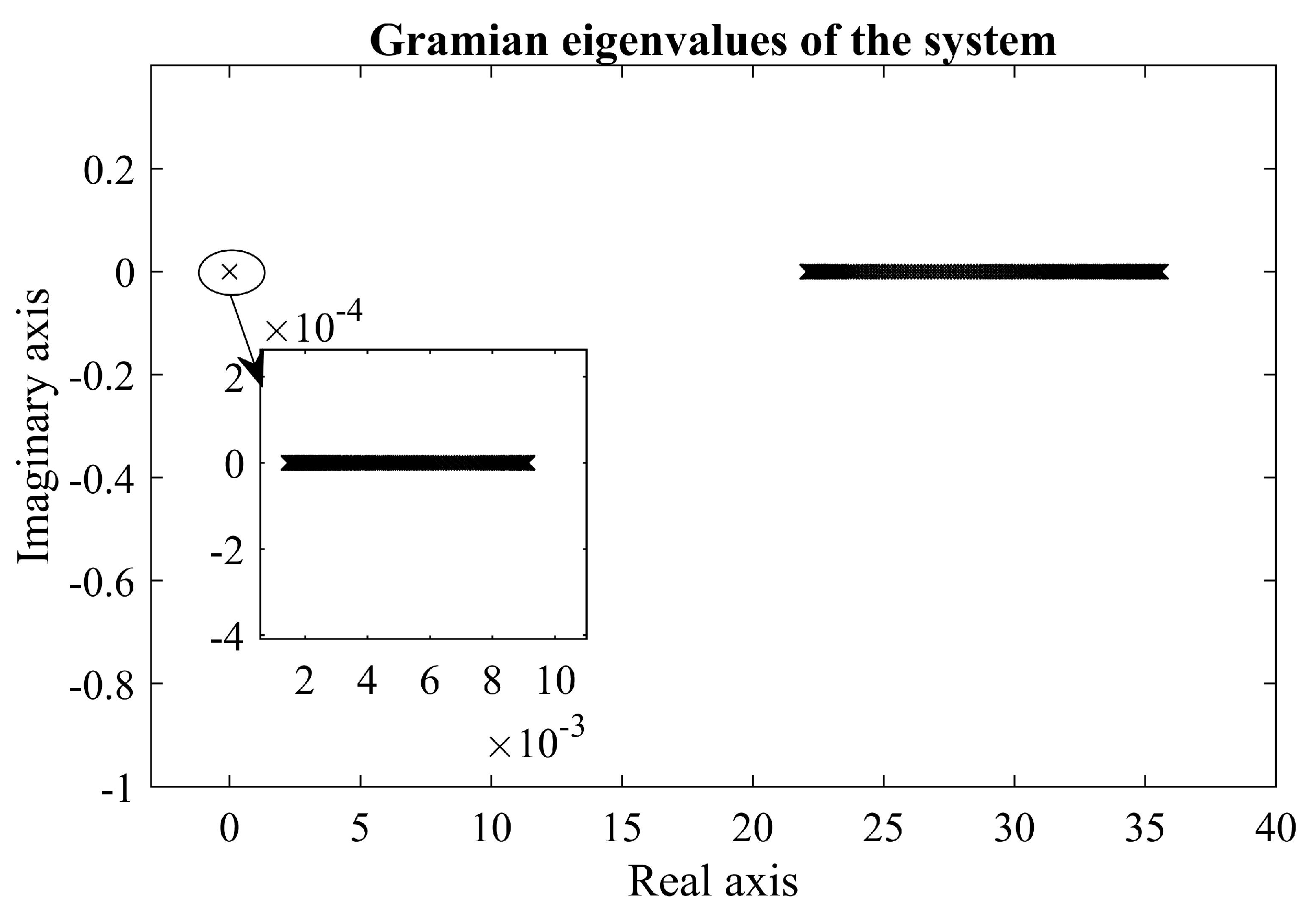
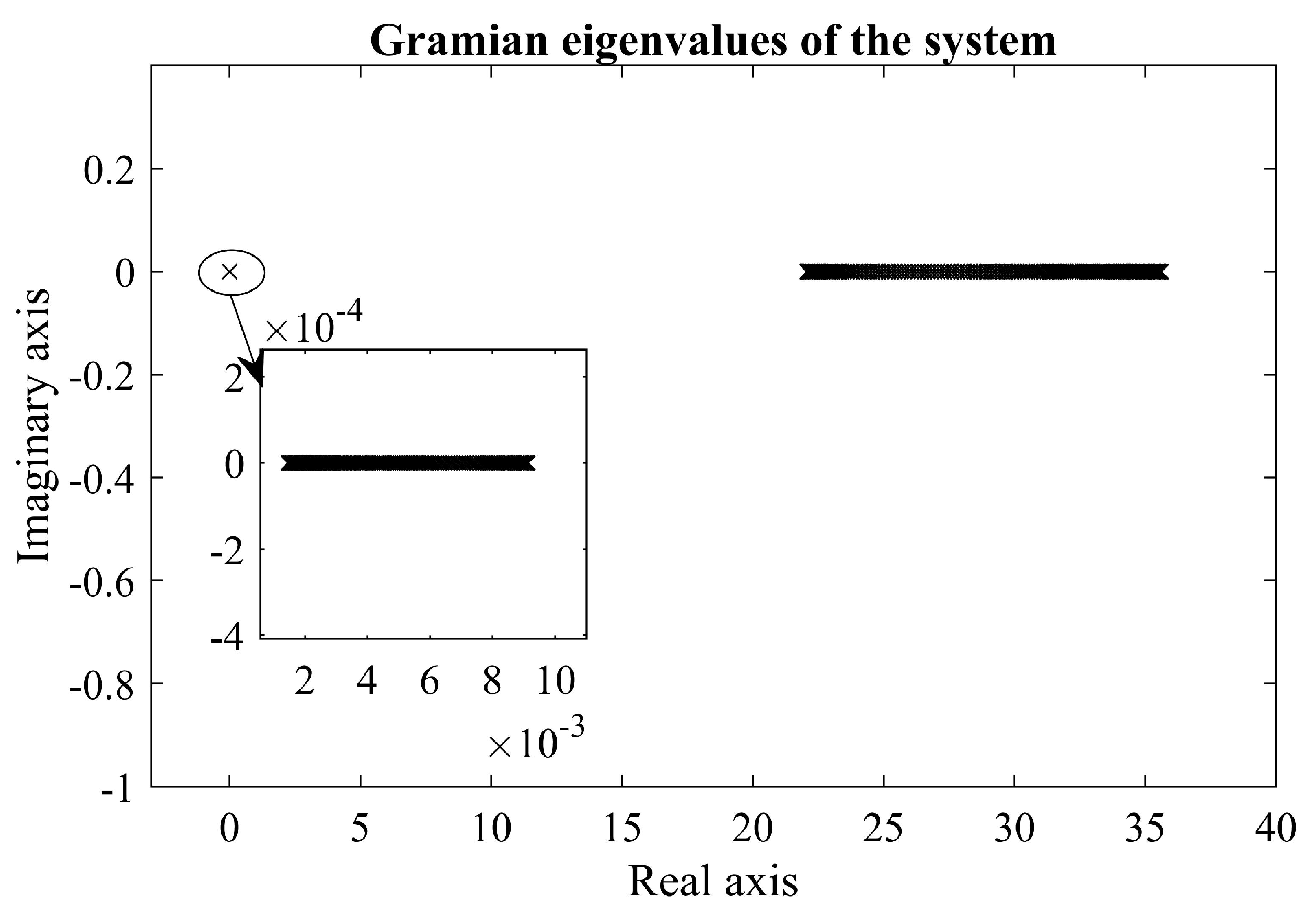
4.2. Controllability Analysis
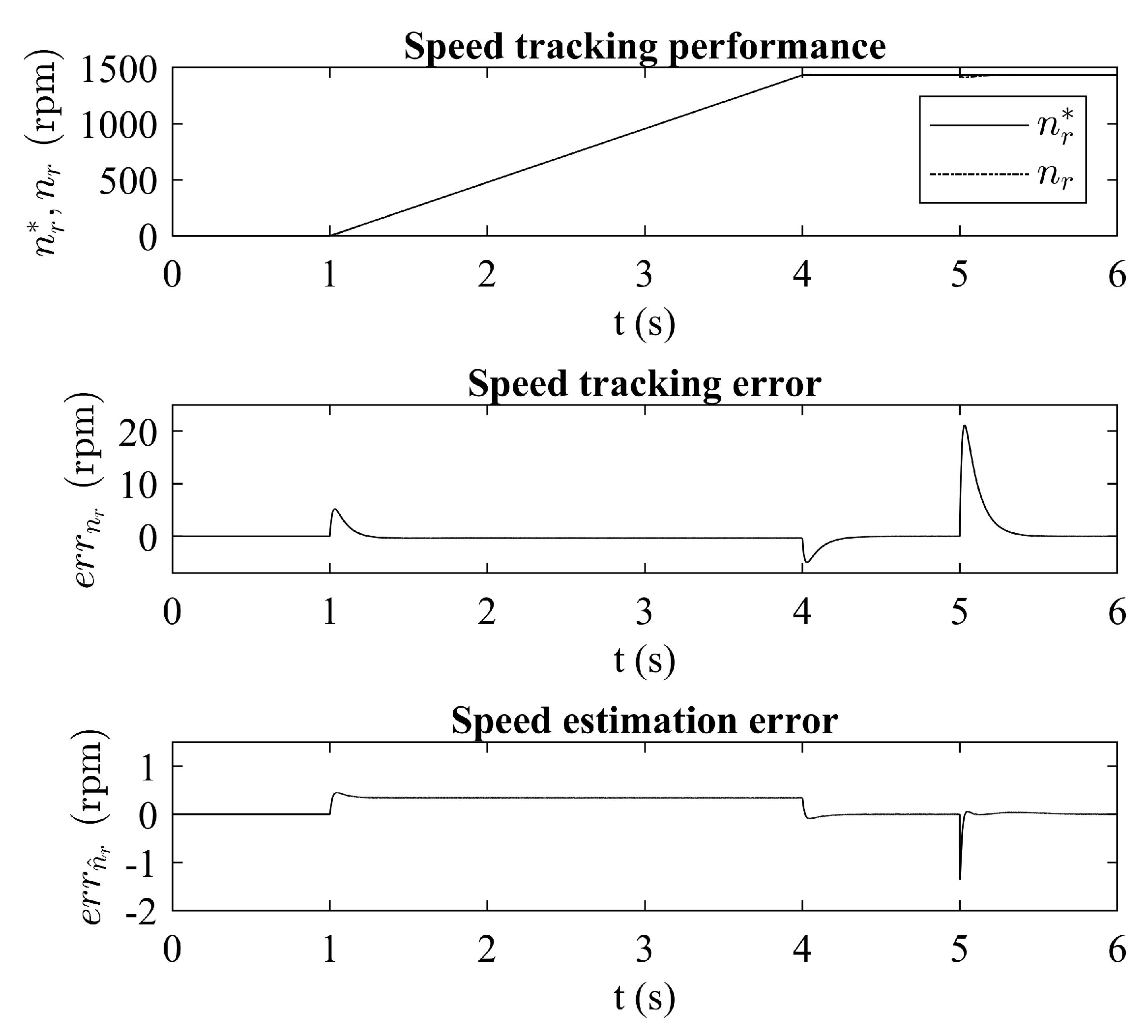
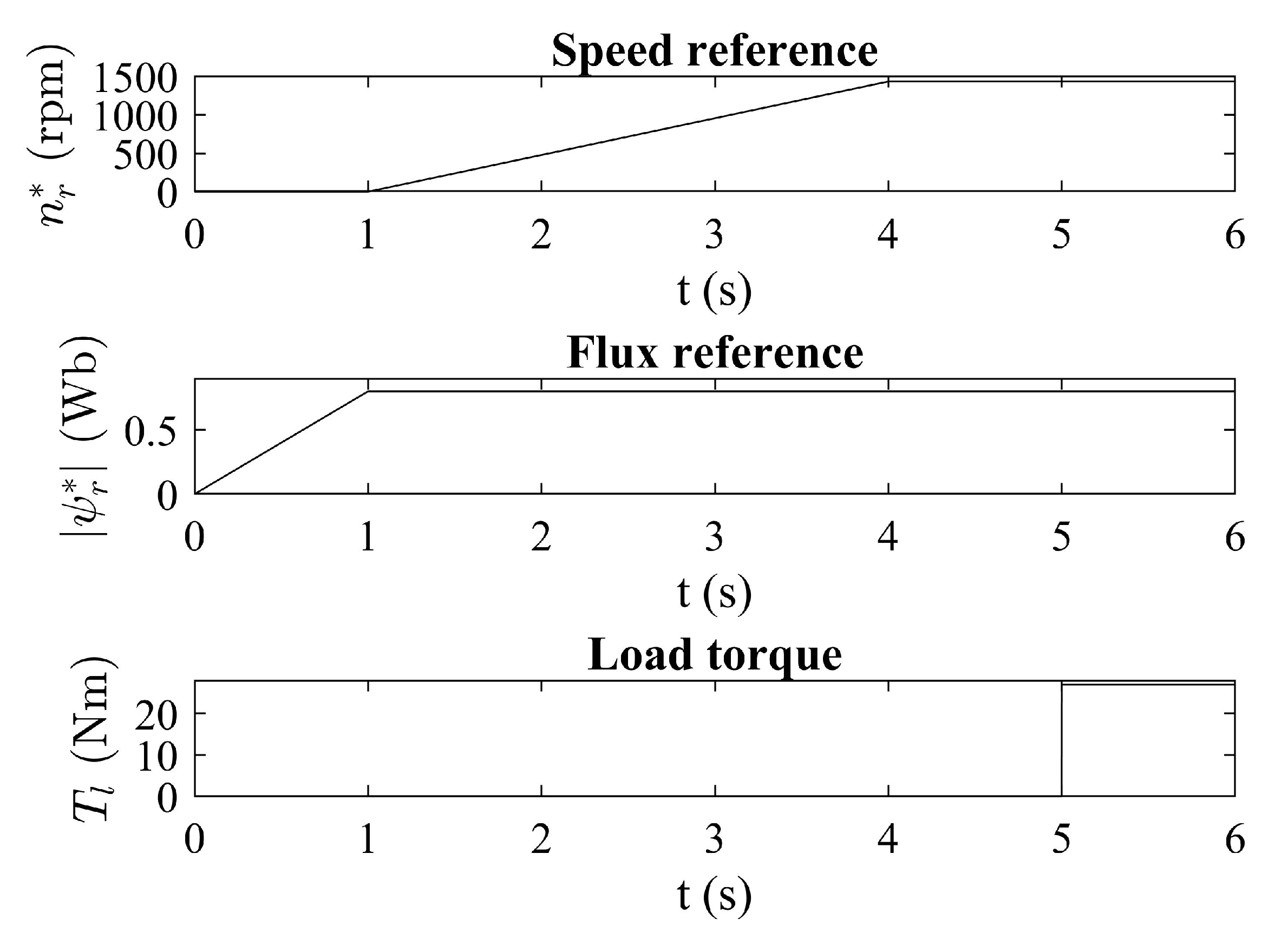
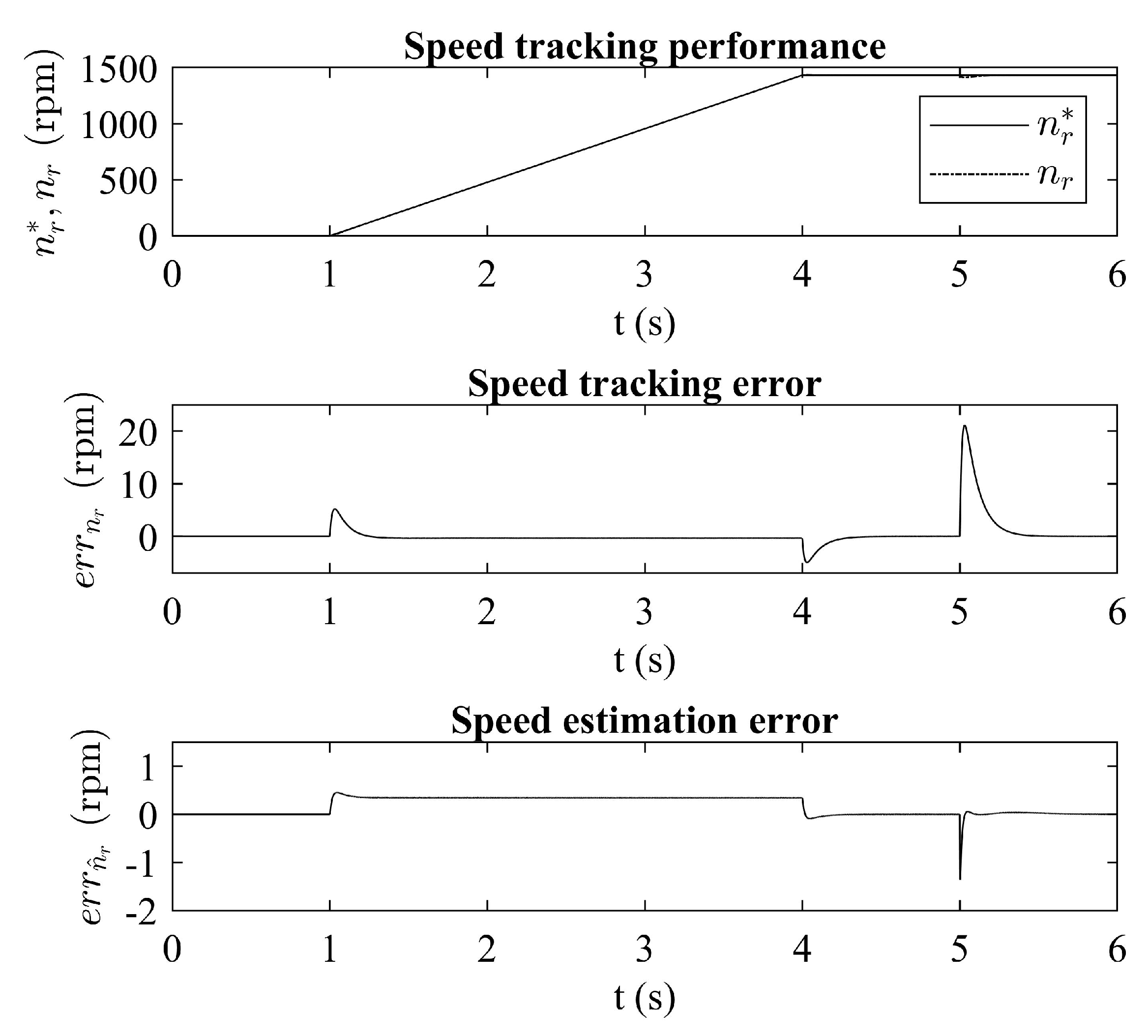
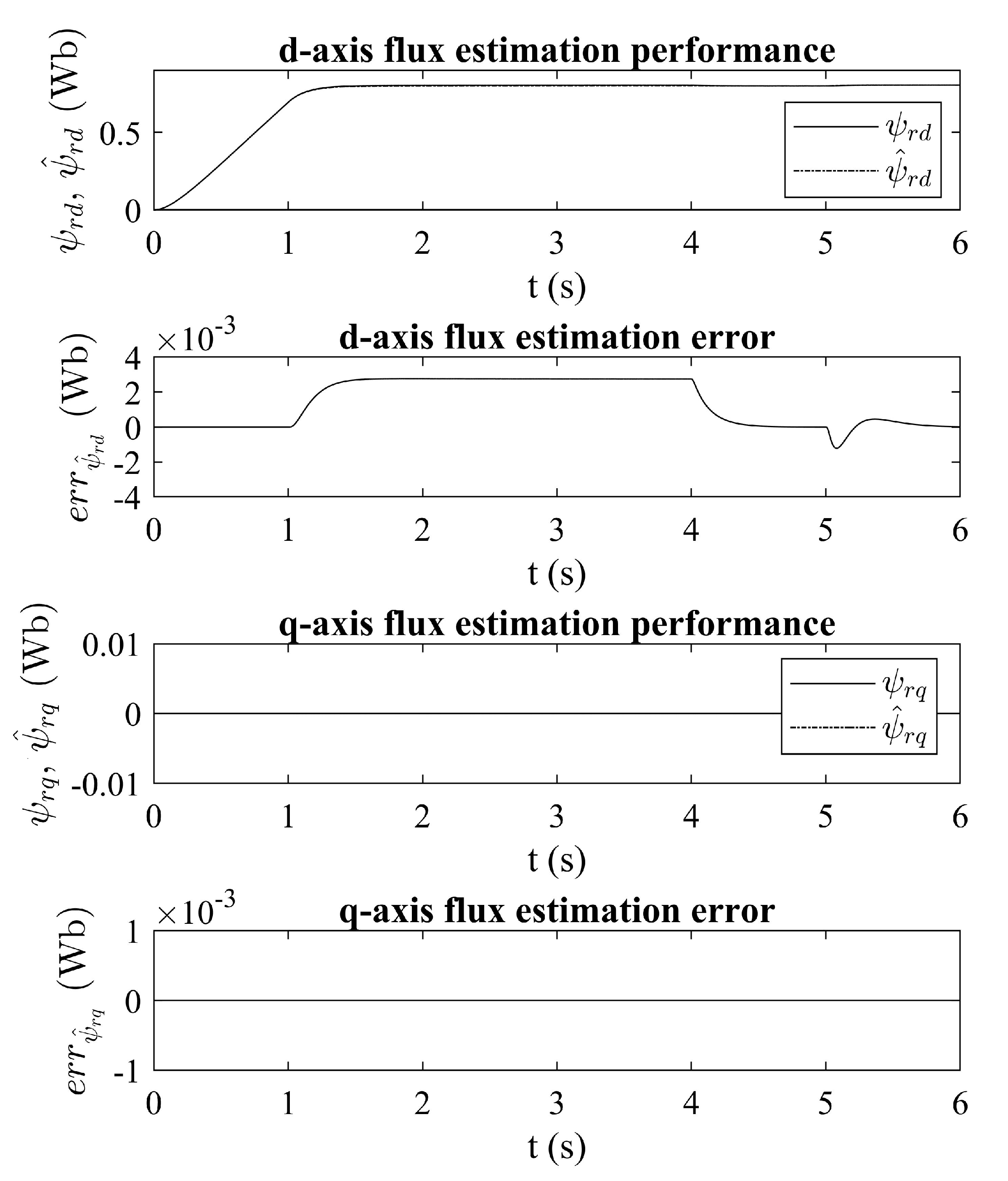
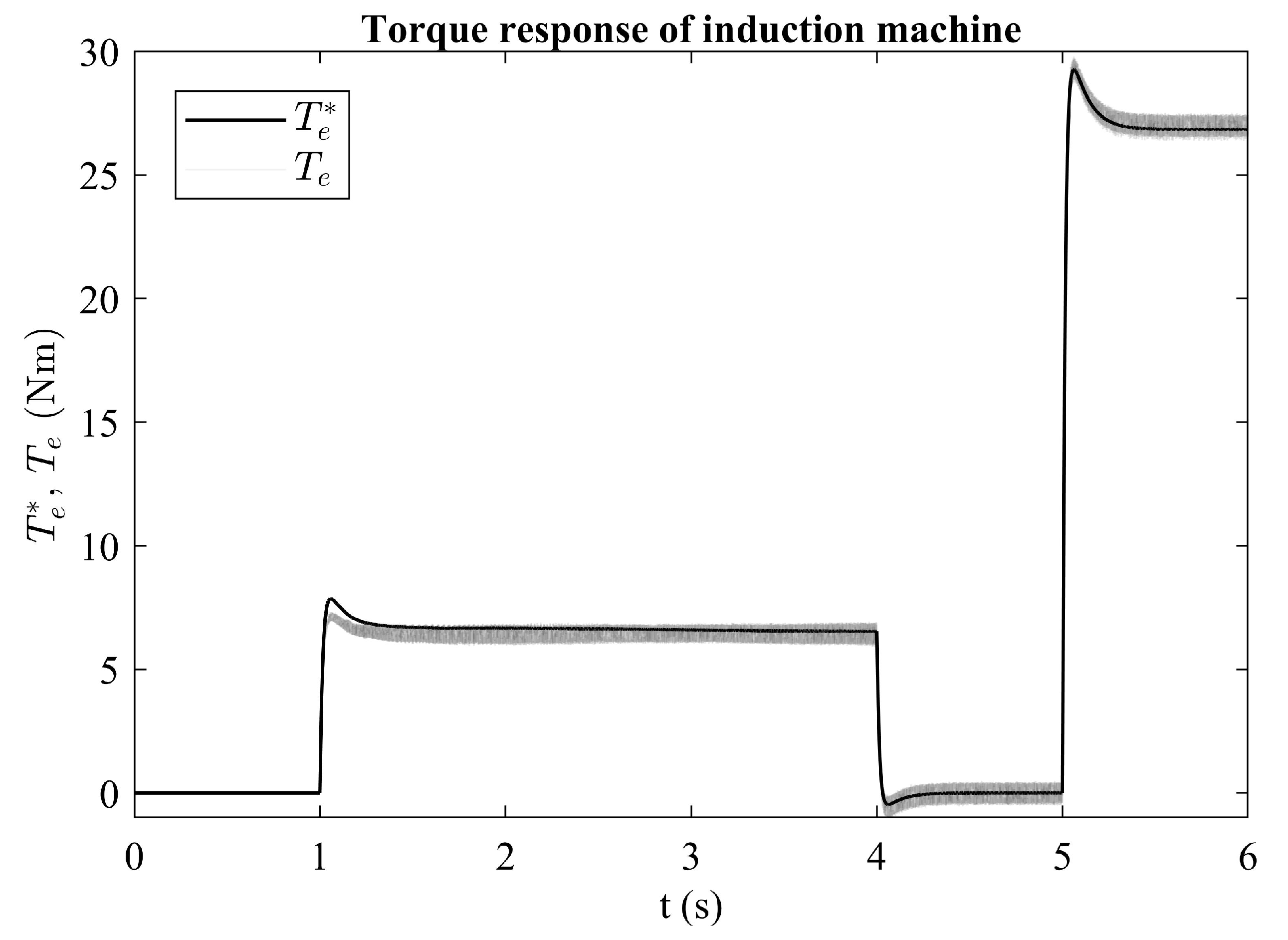
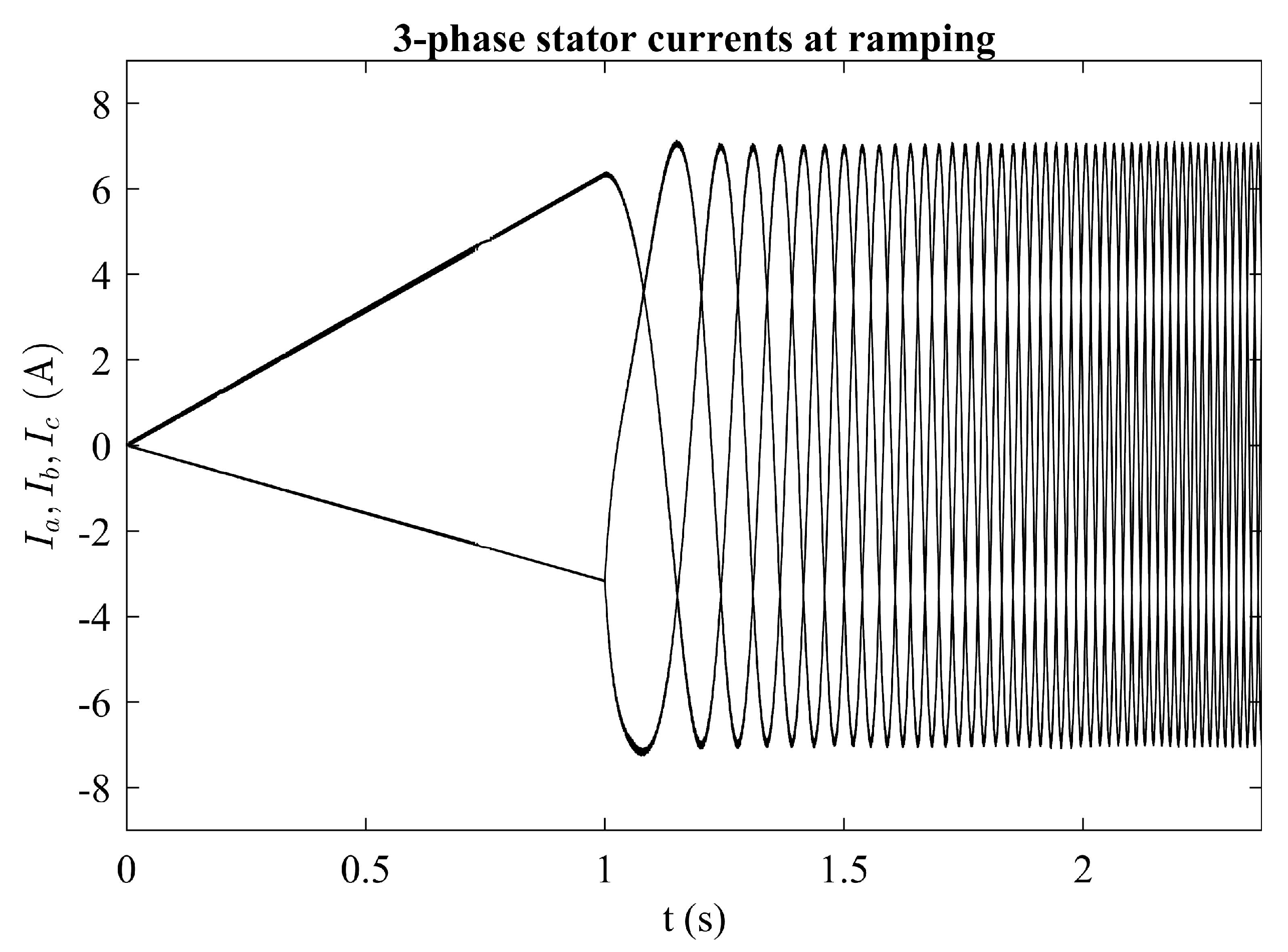
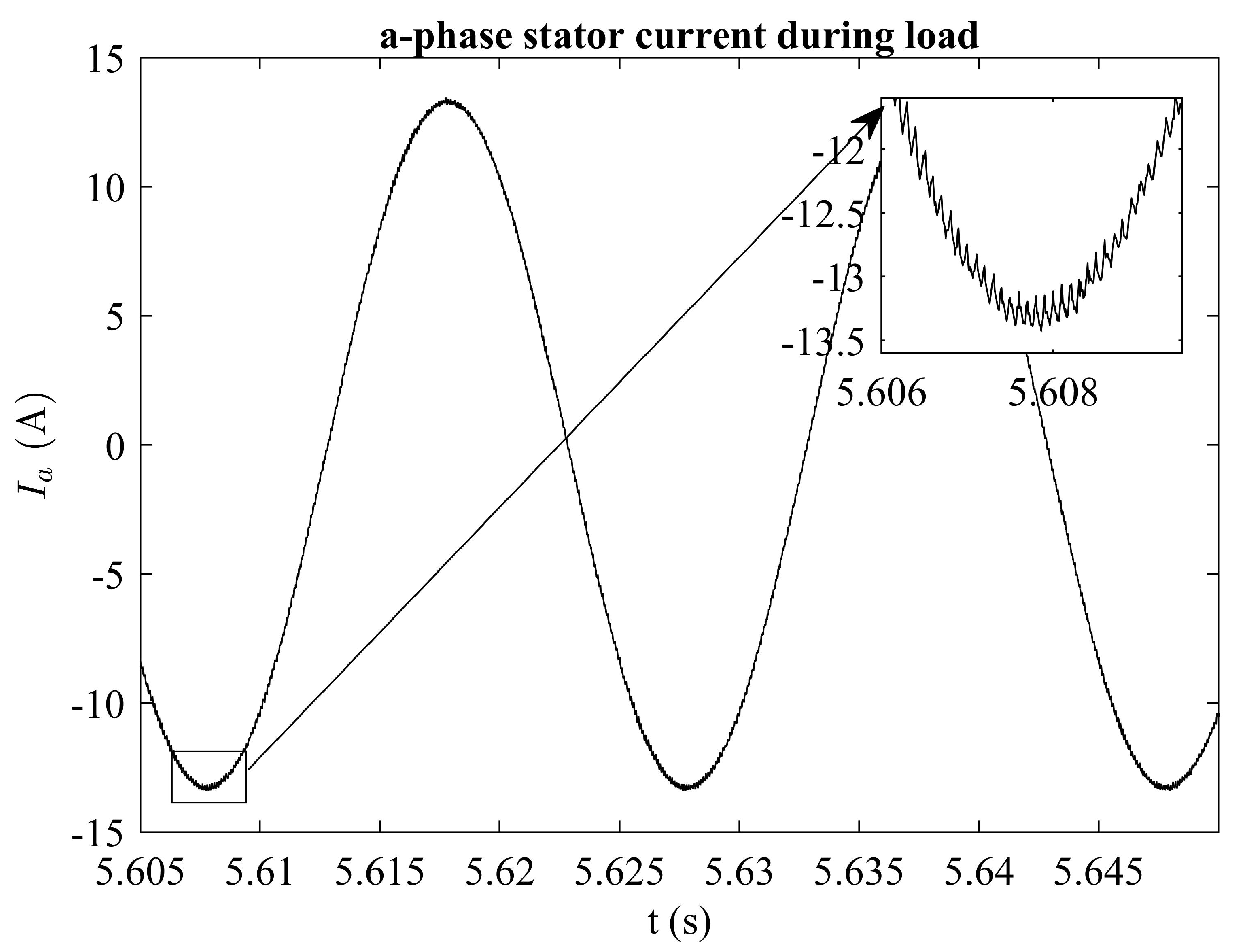
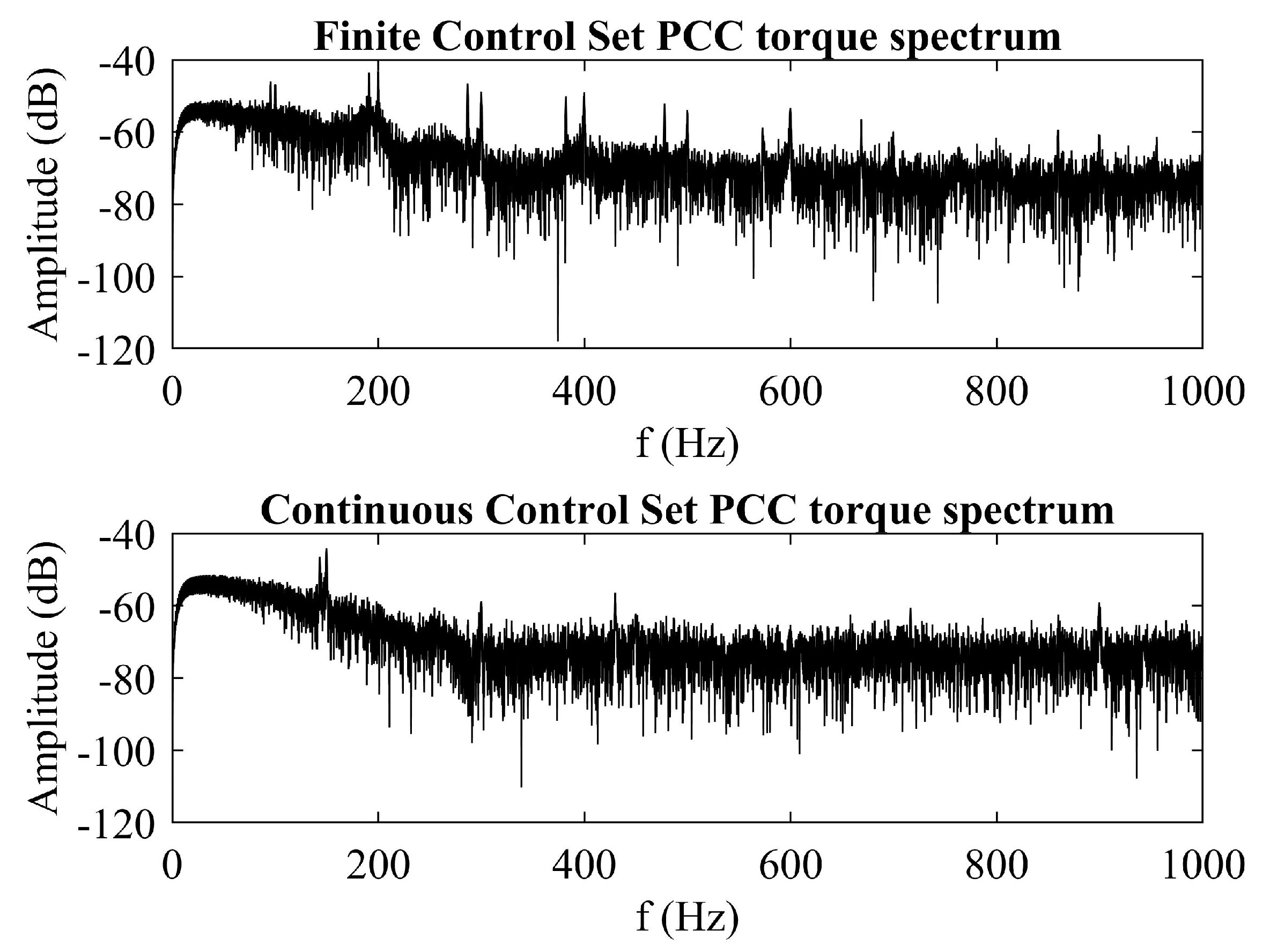
5. Simulation Results
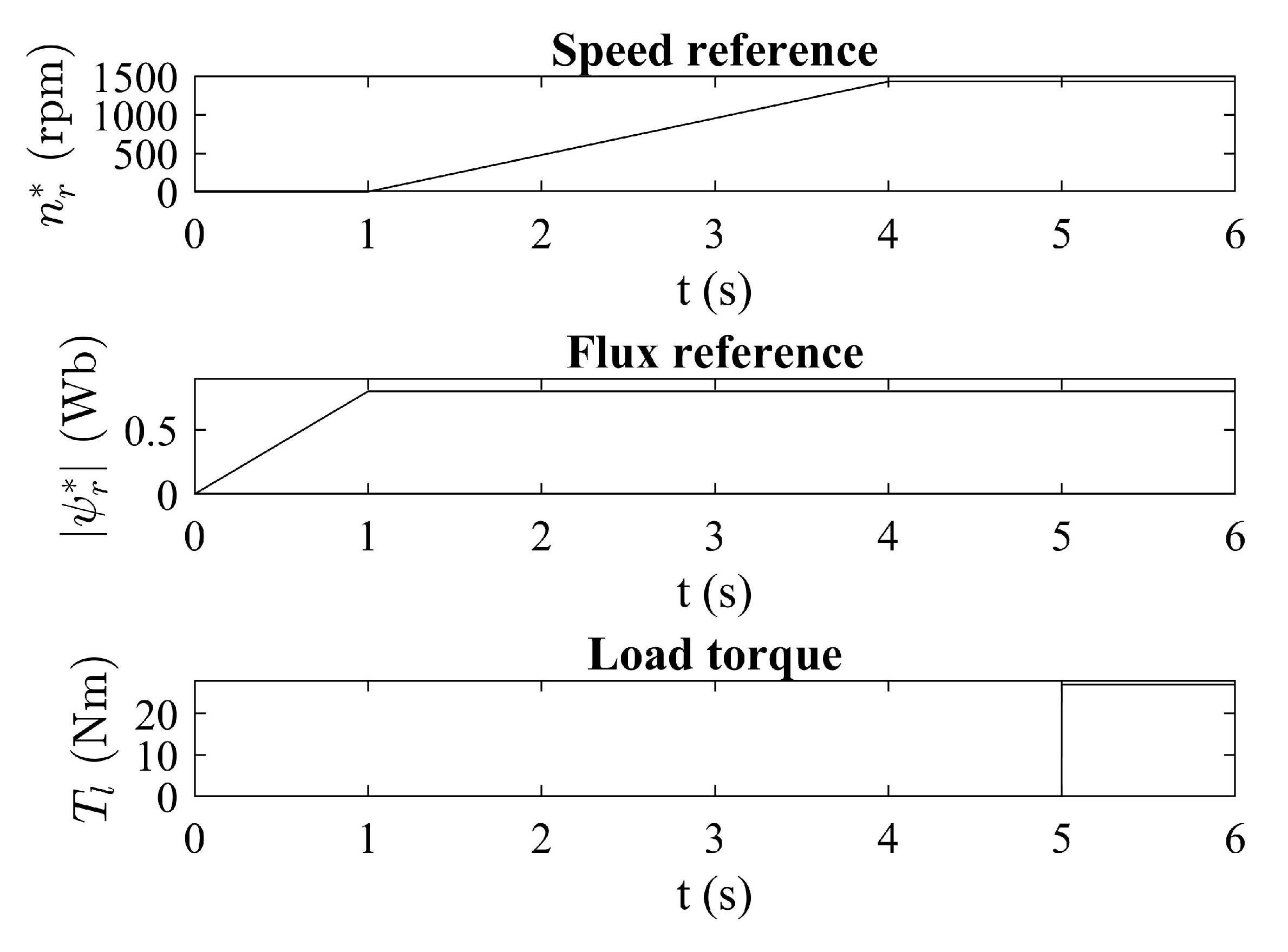
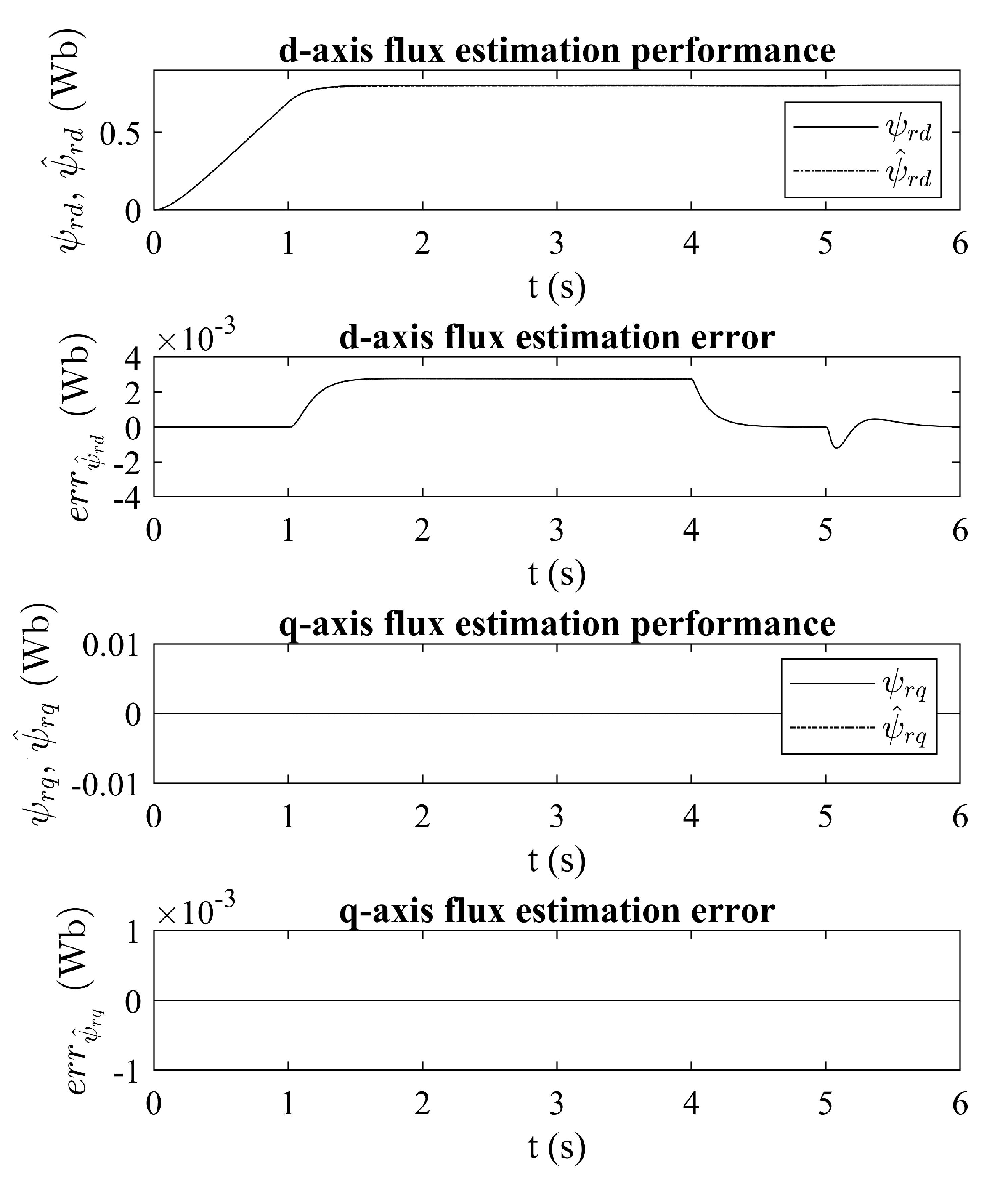
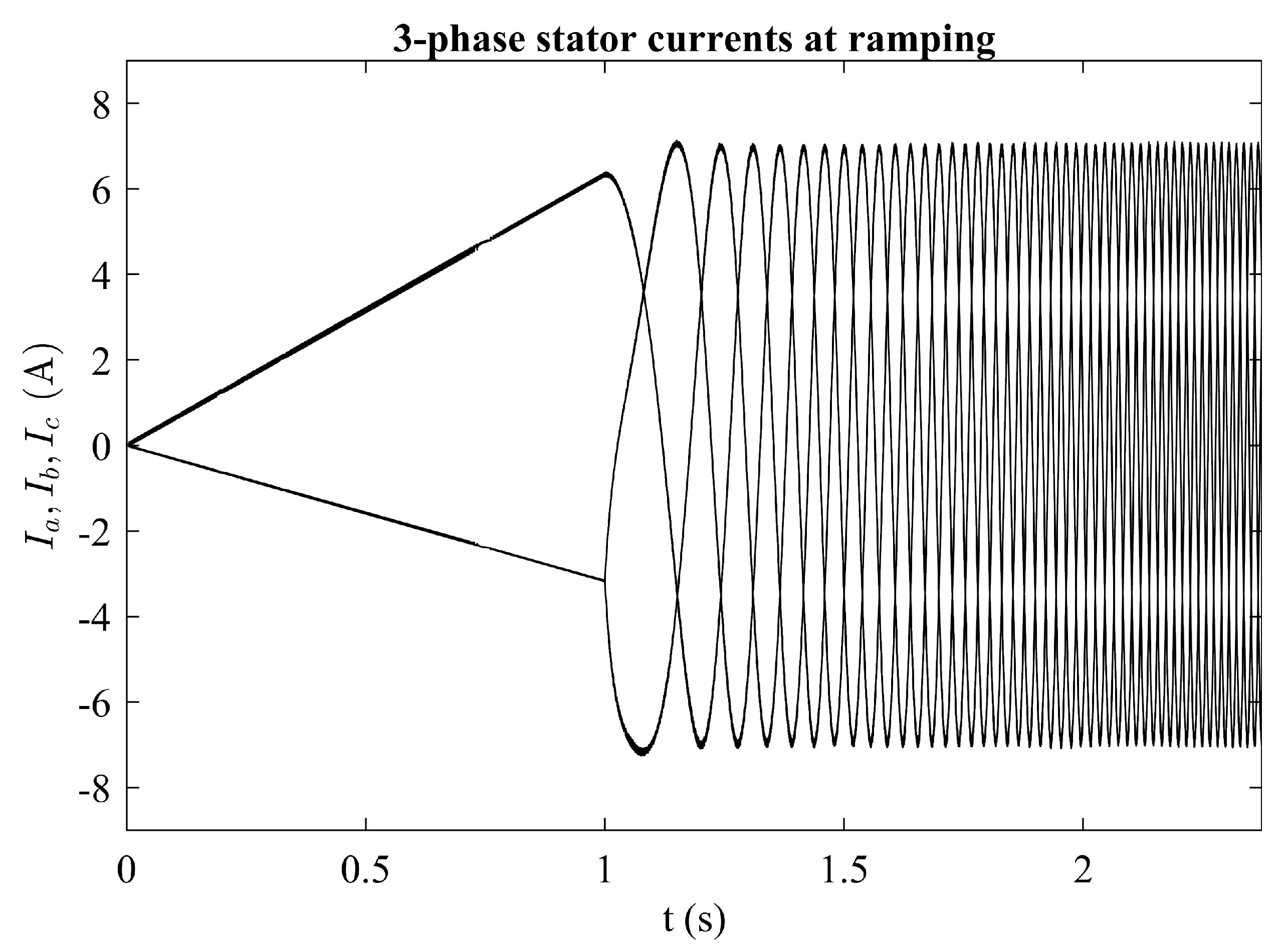
- Rotor flux: ramping from 0 to 0.8 Wb during first second of the simulation and stays at the constant value throughout the simulation;
- Rotor speed: ramping from 0 to 1433 rpm during 3 s period, starting from the first second of the simulation and stays at the constant value throughout the simulation;
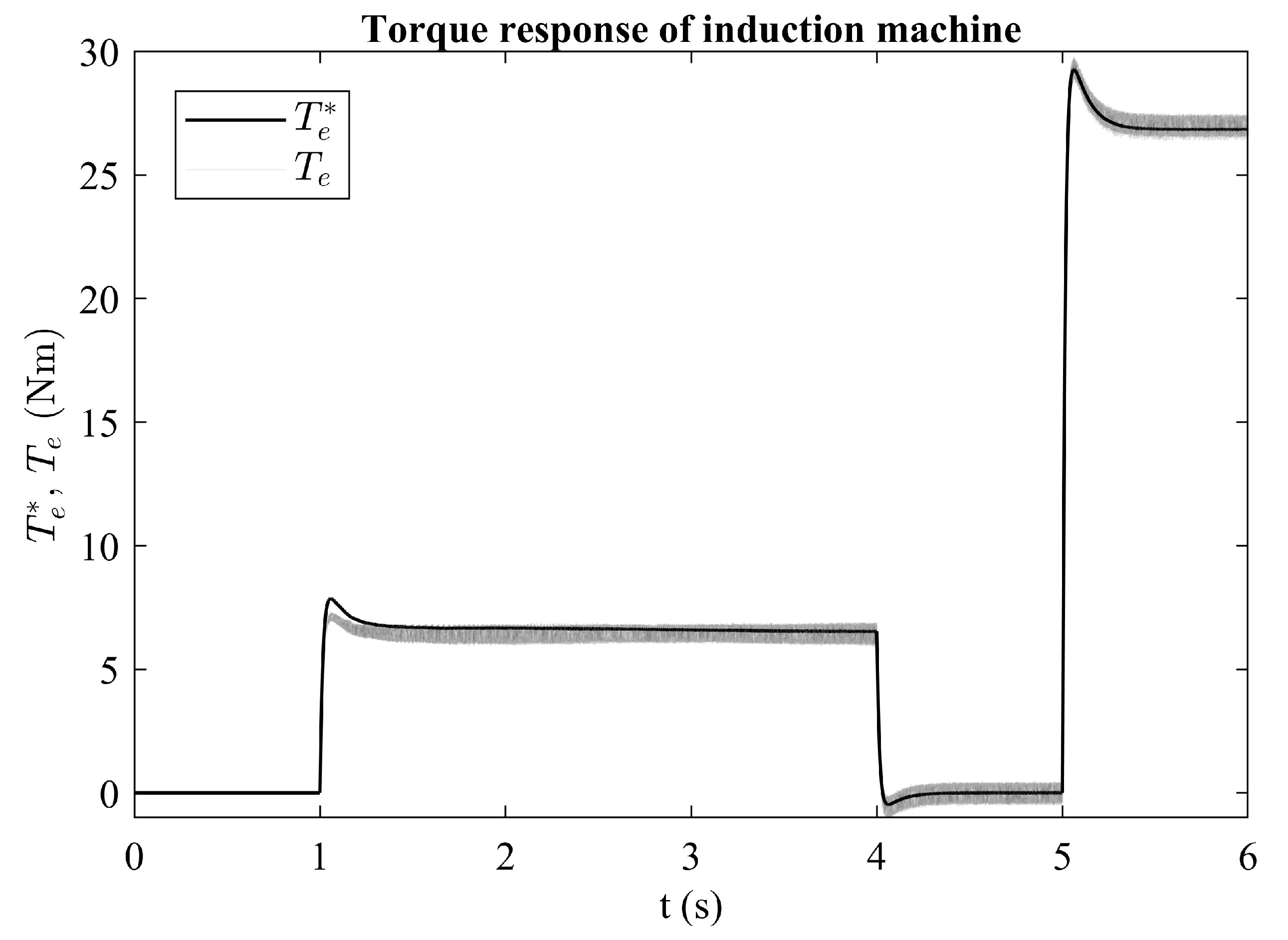
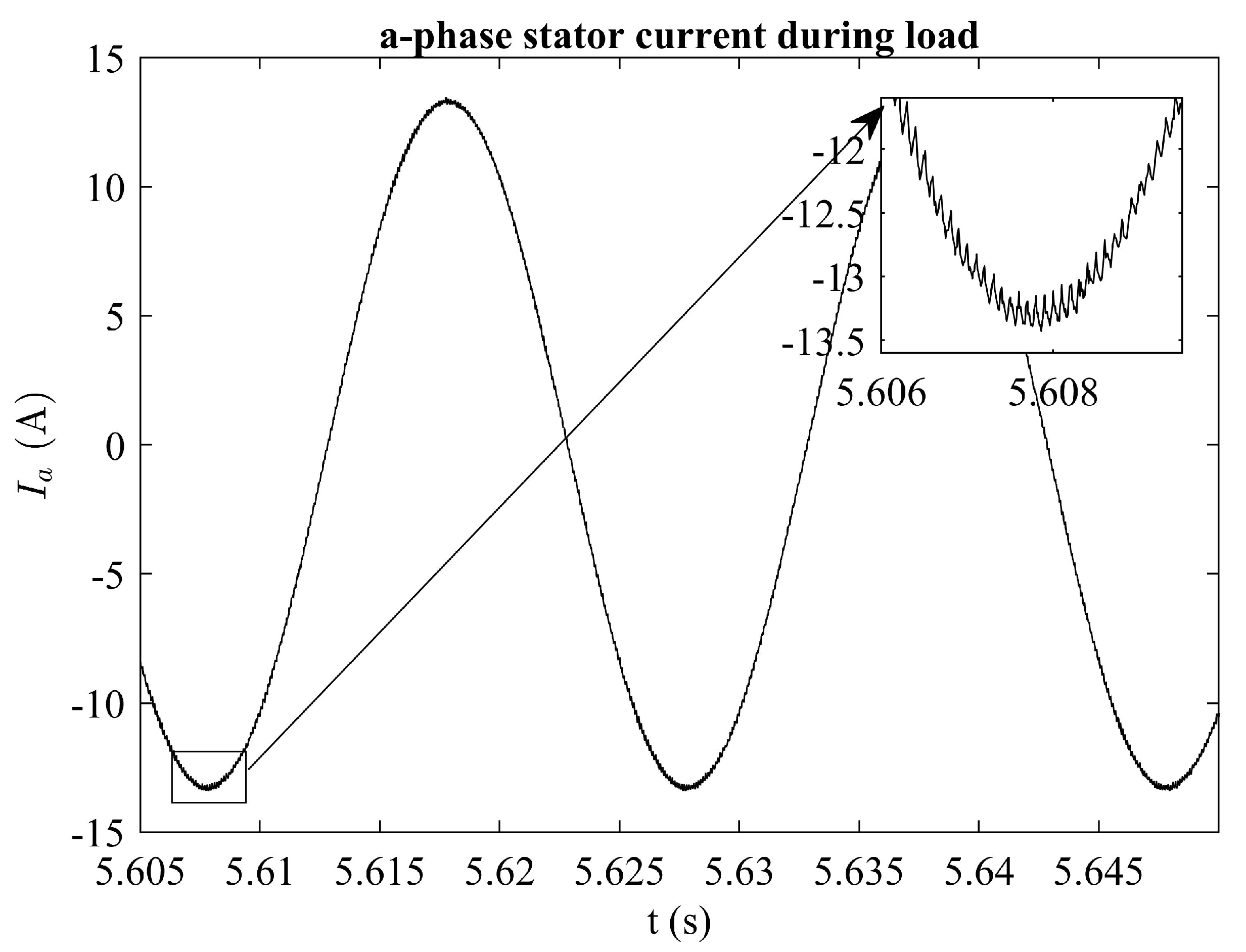
- Load: nominal load torque of 27 is applied at the fifth second of the simulation and stayed at the constant value throughout the simulation;
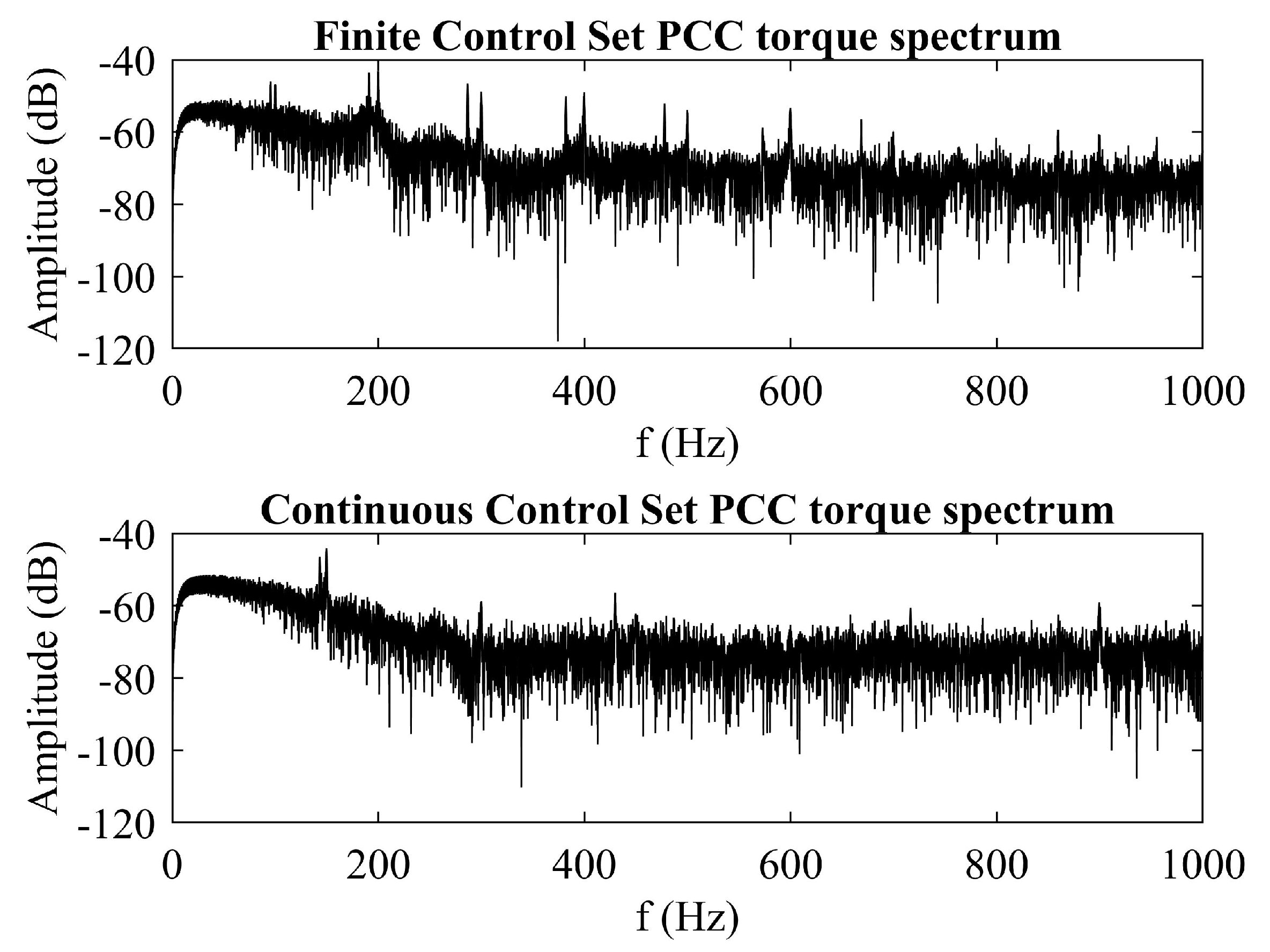
Comparison with Finite Control Set PCC
6. Discussion
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| FOC | Field Oriented Control |
| DTC | Direct Torque Control |
| MPC | Model Predictive Control |
| PTC | Predictive Torque Control |
| PCC | Predictive Current Control |
References
- Hasse, K. Zur Dynamik Drehzahlgeregelter Antriebe mit Stromrichtergespeisten Asynchron-Kurzschlusslaaeufermaschinen. Ph.D. Thesis, Technische Hochschule Darmstadt, Darmstadt, Germany, 1969. [Google Scholar]
- Blaschke, F. Das Verfahren der Feldorientierung zur Regelung der Drehfeldmaschine. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 1973. [Google Scholar]
- Takahashi, I.; Noguchi, T. A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor. IEEE Trans. Ind. Appl. 1986, IA-22, 820–827. [Google Scholar] [CrossRef]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model Predictive Control for Power Converters and Drives: Advances and Trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef] [Green Version]
- Cortes, P.; Kazmierkowski, M.; Kennel, R.; Quevedo, D.; Rodriguez, J. Predictive Control in Power Electronics and Drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Kouro, S.; Cortes, P.; Vargas, R.; Ammann, U.; Rodriguez, J. Model Predictive Control—A Simple and Powerful Method to Control Power Converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the Art of Finite Control Set Model Predictive Control in Power Electronics. IEEE Trans. Ind. Inf. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, Z.; Mei, X.; Rodríguez, J.; Kennel, R. Advanced Control Strategies of Induction Machine: Field Oriented Control, Direct Torque Control and Model Predictive Control. Energies 2018, 11, 120. [Google Scholar] [CrossRef] [Green Version]
- Kennel, R.; Rodriguez, J.; Espinoza, J.; Trincado, M. High performance speed control methods for electrical machines: An assessment. In Proceedings of the 2010 IEEE International Conference on Industrial Technology, Via del Mar, Chile, 14–17 March 2010. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kennel, R.M.; Espinoza, J.R.; Trincado, M.; Silva, C.A.; Rojas, C.A. High-Performance Control Strategies for Electrical Drives: An Experimental Assessment. IEEE Trans. Ind. Electron. 2012, 59, 812–820. [Google Scholar] [CrossRef]
- Wang, F.; Li, S.; Mei, X.; Xie, W.; Rodriguez, J.; Kennel, R.M. Model-Based Predictive Direct Control Strategies for Electrical Drives: An Experimental Evaluation of PTC and PCC Methods. IEEE Trans. Ind. Inf. 2015, 11, 671–681. [Google Scholar] [CrossRef]
- Wang, F.; Chen, Z.; Stolze, P.; Kennel, R.; Trincado, M.; Rodriguez, J. A Comprehensive Study of Direct Torque Control (DTC) and Predictive Torque Control (PTC) for High Performance Electrical Drives. EPE J. 2015, 25, 12–21. [Google Scholar] [CrossRef]
- Englert, T.; Graichen, K. Nonlinear model predictive torque control and setpoint computation of induction machines for high performance applications. Control Eng. Pract. 2020, 99, 104415. [Google Scholar] [CrossRef]
- Rojas, C.A.; Rodriguez, J.; Villarroel, F.; Espinoza, J.R.; Silva, C.A.; Trincado, M. Predictive Torque and Flux Control Without Weighting Factors. IEEE Trans. Ind. Electron. 2013, 60, 681–690. [Google Scholar] [CrossRef]
- Wang, F.; Xie, H.; Chen, Q.; Davari, S.A.; Rodriguez, J.; Kennel, R. Parallel Predictive Torque Control for Induction Machines Without Weighting Factors. IEEE Trans. Power Electron. 2020, 35, 1779–1788. [Google Scholar] [CrossRef]
- Nemec, M.; Nedeljkovic, D.; Ambrozic, V. Predictive Torque Control of Induction Machines Using Immediate Flux Control. IEEE Trans. Ind. Electron. 2007, 54, 2009–2017. [Google Scholar] [CrossRef]
- Ahmed, A.A.; Koh, B.K.; Park, H.S.; Lee, K.B.; Lee, Y.I. Finite-Control Set Model Predictive Control Method for Torque Control of Induction Motors Using a State Tracking Cost Index. IEEE Trans. Ind. Electron. 2017, 64, 1916–1928. [Google Scholar] [CrossRef]
- Zhang, Y.; Xia, B.; Yang, H. Model predictive torque control of induction motor drives with reduced torque ripple. IET Electr. Power Appl. 2015, 9, 595–604. [Google Scholar] [CrossRef]
- Ouhrouche, M.; Errouissi, R.; Trzynadlowski, A.M.; Tehrani, K.; Benzaioua, A. A Novel Predictive Direct Torque Controller for Induction Motor Drives. IEEE Trans. Ind. Electron. 2016, 63, 5221–5230. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, Z.; Kennel, R.; Rodríguez, J. Model predictive torque control with an extended prediction horizon for electrical drive systems. Int. J. Control 2014, 88, 1379–1388. [Google Scholar] [CrossRef]
- Wang, J.; Wang, F. Robust sensorless FCS-PCC control for inverter-based induction machine systems with high-order disturbance compensation. J. Power Electron. 2020, 20, 1222–1231. [Google Scholar] [CrossRef]
- Wang, J.; Wang, F.; Wang, G.; Li, S.; Yu, L. Generalized Proportional Integral Observer-Based Robust Finite Control Set Predictive Current Control for Induction Motor Systems with Time-Varying Disturbances. IEEE Trans. Ind. Inf. 2018, 14, 4159–4168. [Google Scholar] [CrossRef]
- Wang, T.; Hu, Y.; Wu, Z.; Ni, K. Low-Switching-Loss Finite Control Set Model Predictive Current Control for IMs Considering Rotor-Related Inductance Mismatch. IEEE Access 2020, 8, 108928–108941. [Google Scholar] [CrossRef]
- Wang, F.; Wang, J.; Kennel, R.M.; Rodriguez, J. Fast Speed Control of AC Machines without the Proportional-Integral Controller: Using an Extended High-Gain State Observer. IEEE Trans. Power Electron. 2019, 34, 9006–9015. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, Z.; Wang, J.; Rodríguez, J. Sensorless model-based PCC for induction machine. IET Electr. Power Appl. 2017, 11, 885–892. [Google Scholar] [CrossRef]
- Vafaie, M.H. Approach for classifying continuous control set-predictive controllers applied in AC motor drives. IET Power Electron. 2020, 13, 1500–1513. [Google Scholar] [CrossRef]
- Wallscheid, O.; Ngoumtsa, E.F.B. Investigation of Disturbance Observers for Model Predictive Current Control in Electric Drives. IEEE Trans. Power Electron. 2020, 35, 13563–13572. [Google Scholar] [CrossRef]
- Wróbel, K.; Serkies, P.; Szabat, K. Model Predictive Base Direct Speed Control of Induction Motor Drive—Continuous and Finite Set Approaches. Energies 2020, 13, 1193. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, A.A.; Koh, B.K.; Lee, Y.I. A Comparison of Finite Control Set and Continuous Control Set Model Predictive Control Schemes for Speed Control of Induction Motors. IEEE Trans. Ind. Inf. 2018, 14, 1334–1346. [Google Scholar] [CrossRef]
- Ahmed, A.A.; Koh, B.K.; Lee, Y.I. Continuous Control Set-Model Predictive Control for Torque Control of Induction Motors in a Wide Speed Range. Electr. Power Components Syst. 2018, 46, 2142–2158. [Google Scholar] [CrossRef]
- Krause, P. Analysis of Electric Machinery and Drive Systems; IEEE Press: New York, NY, USA, 2002. [Google Scholar]
- Rodriguez, J.; Pontt, J.; Silva, C.A.; Correa, P.; Lezana, P.; Cortes, P.; Ammann, U. Predictive Current Control of a Voltage Source Inverter. IEEE Trans. Ind. Electron. 2007, 54, 495–503. [Google Scholar] [CrossRef]
- Bose, B.K. Modern Power Electronics and AC Drives; Prentice Hall: Hoboken, NJ, USA, 2001. [Google Scholar]
- Afanasiev, V.N.; Kolmanovskii, V.; Nosov, V.R. Mathematical Theory of Control Systems Design; Springer: Dordrecht, The Netherlands, 1996. [Google Scholar]
- Ma, Y.; Fan, L.; Miao, Z. Realizing space vector modulation in MATLAB/Simulink and PSCAD. In Proceedings of the 2013 North American Power Symposium (NAPS), Manhattan, KS, USA, 22–24 September 2013. [Google Scholar] [CrossRef]
- Iqbal, A.; Lamine, A.; Ashraf, I.; Mohibullah. Matlab/Simulink Model of Space Vector PWM for Three-Phase Voltage Source Inverter. In Proceedings of the 41st International Universities Power Engineering Conference, Newcastle upon Tyne, UK, 6–8 September 2006. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Machine Parameter | Value | Control Parameter | Value | ||
|---|---|---|---|---|---|
| Stator resistane | () | 1.1507 | MRAS proportional gain | 1000 | |
| Rotor resistance | () | 1.0107 | MRAS integrator gain | 10,000 | |
| Stator inductance | () | 0.1315 | Speed controller proportional gain | 10 | |
| Rotor inductance | () | 0.1315 | Speed controller integrator gain | 100 | |
| Mutual inductance | () | 0.126 | Simulation time step | () | |
| Pole pairs | p | 2 | DC link voltage | () | 565 |
| Inertia moment | J () | 0.129 | Inverter switching frequency | () | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Varga, T.; Benšić, T.; Jerković Štil, V.; Barukčić, M. Continuous Control Set Predictive Current Control for Induction Machine. Appl. Sci. 2021, 11, 6230. https://doi.org/10.3390/app11136230
Varga T, Benšić T, Jerković Štil V, Barukčić M. Continuous Control Set Predictive Current Control for Induction Machine. Applied Sciences. 2021; 11(13):6230. https://doi.org/10.3390/app11136230
Chicago/Turabian StyleVarga, Toni, Tin Benšić, Vedrana Jerković Štil, and Marinko Barukčić. 2021. "Continuous Control Set Predictive Current Control for Induction Machine" Applied Sciences 11, no. 13: 6230. https://doi.org/10.3390/app11136230
APA StyleVarga, T., Benšić, T., Jerković Štil, V., & Barukčić, M. (2021). Continuous Control Set Predictive Current Control for Induction Machine. Applied Sciences, 11(13), 6230. https://doi.org/10.3390/app11136230