Abstract
A robust output tracking controller is necessary for the safe and reliable operation of aeroengines. This paper aims at developing an output tracking approach for aeroengines. In order to improve the tracking performance of the traditional robust tracker, the proposed control structure is designed as a combination of a nominal controller and a compensator. Concretely, an nominal controller is derived from game algebraic Raccati equation (GARE), which facilitates establishing a compensator for the system. Since the reference is usually unknown in advance for practical application, the proposed compensator is calculated online according to the nominal controller and the current reference. The solvability of the compensator and the stability of the system is guaranteed for both stable and bounded unstable references. Simulation examples for a turbofan engine are provided to demonstrate the effectiveness of the proposed algorithm.
1. Introduction
An aeroengine is a complicated aerothermodynamic system working in harsh environments. It is important to make aeroengines operate reliably in the presence of external disturbances, measurement noises, and modeling uncertainties [1,2]. Therefore, robust performance of the closed-loop system should be considered in the design of the controller. Robust control has been applied to aeroengines since the 1970s since it can attenuate the effect of the uncertainties on system performance without destabilizing the system [3,4,5,6]. As a sub-field of robust control, control is an important, robust approach to attenuate the effect of external disturbances [7]. Due to the lack of the consideration on the linear quadratic performance, control is usually combined with control to obtain good transient behaviors for the system [8,9,10]. / control is an ideal approach to maintain the balance between the transient tracking performance and the robust performance for the control of aeroengines [11].
Most robust controllers are designed as a state regulator or a state tracker [12,13,14]. As for the traditional state tracker, the desired thrust of aeroengines is obtained in an indirect way by controlling the state. By contrast, it is more effective to design an output tracking controller [15,16]. The design of the tracking controller aims at minimizing the output tracking error. To achieve this objective, there are two mainstream approaches: linear quadratic (LQ) tracker and robust tracker. LQ tracker is a well-established traditional method based on optimal control, and the controller consists of a feedback controller (i.e., nominal controller) and a feedforward controller (i.e., compensator), see [17,18]. However, the solution is obtained by calculating the recursive algebraic Raccati equations (ARE) and auxiliary differential equations, and thereby the reference is assumed to be known in advance, which restricts its practical application [18,19]. A solution for this problem is to design an online controller calculated without knowing the reference ahead of time.
Robust tracker is usually designed based on robust control for a certain known reference. the output tracking error is augmented into the state of a new dynamic system, and thereby the output tracking problem becomes the stabilization of the constructed dynamic system [20,21]. In control design, the variation of the reference over time is regarded as a power-bounded uncertainty of the system, and the robust performance and the stability of the system are guaranteed. However, the robust tracker may have poor tracking performance when the reference is quite different from the designed reference. Therefore, a compensator is required to deal with this problem.
Aiming at dealing with the above problems of LQ tracker and robust tracker, a novel controller, which consists of a nominal controller and a compensator as LQ tracker does, is designed. Concretely, based on control theory, the nominal controller is designed at first for a step reference. Different from the robust tracker in [21], the proposed nominal controller is derived from the game algebraic Raccati equation (GARE) so as to obtain a compensator. Then, the compensator is calculated online by the practical reference to improve the transient tracking performance. Meanwhile, the solvability of the compensator is guaranteed for stable reference. Moreover, due to the robust design, the proposed controller can deal with the tracking control for bounded unstable reference by regarding the reference as a stable reference with a power-bounded disturbance.
The remainder of this paper is organized as follows. Section 2 formulates the robust tracking problem. Section 3 presents the main theorem for the design of a robust nominal controller. Afterwards, the performance compensator are introduced in Section 4. Numeric simulations are carried out in Section 5 to illustrate the efficiency of the proposed approach. Finally, some conclusions are derived in Section 6.
2. Problem Formulation
In this section, a new formulation for tracking control is presented, and the basic problem is described.
Consider the locally linearized system of an aeroengine in the following form:
where , , and are known constant matrices; is the disturbance with the influence matrices , ; is the input, is the state, and is the output; denotes the deviation between the present operating point and the initial point.
Similar to [22], in order to make it easy to augment the system with the reference, an equivalent representation of system (1) is obtained by making a differentiation in time as follows:
where .
The output tracking error is as follows:
where is the desired output reference.
Define a performance output z and a quadratic performance index as follows:
where , , and are the given weighting matrices for , e and , respectively. If , and , we obtain ≈ , which stands for the tracking performance.
Consider the following and control performance index:
Equations (6) and (7) indicate that the tracking performance is bounded when and are bounded. Similar to the definition of tracking problem in [23], the robust tracking control problem can be defined as follows:
Definition 1.
( Tracking Problem) Find a controller such that the following holds. Numbered lists can be added as follows:
- (1)
- the controlled system with is asymptotically stable;
- (2)
- are constant variables and such that and hold.
3. Nominal Controller Design
The controller of Tracking Problem in this paper is designed consisting of a nominal controller and a compensator, and the nominal control is introduced in this section.
Assume the reference command is a unit step, and we have
where denotes a unit pulse.
Combining Equations (2) and (8), we have the following augmented system:
where , , , , , and the pulse in Equation (8) is considered as a disturbance on the augmented system.
The a state feedback controller can be re-expressed as:
Integrating from both sides of Equation (10) yields the following equivalent controller:
The diagram of the closed loop control system is shown in Figure 1.
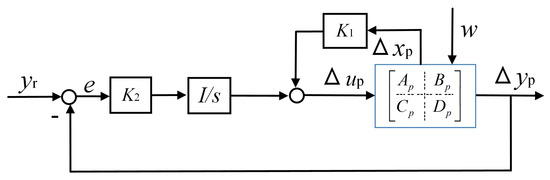
Figure 1.
Diagram of output tracking control with a step reference.
Before we discuss the sufficient condition for achieving the solution for the Tracking Problem, we first introduce the following lemma.
Lemma 1.
[24]. Consider the system as follows:
The following conditions are equivalent:
- (a)
- ;
- (b)
- there is such that and .
Then, based on the lemma, we obtain the following theorem:
Theorem 1.
Proof.
(a) Assume the Lyapunov function as . By applying the Schur Complement Lemma into Inequality (13), we have
which is equivalent to
if , then
Therefore, , which means the closed system is asymptotically stable.
(b) Let and , and the following game algebraic Riccati equation (GARE) is obtained:
According to [18], the closed-loop is asymptotically stable with the controller
and
Because , holds.
Meanwhile, because , the following inequality is obtained:
Let , and the Inequality (20) is re-expressed as . Meanwhile, applying the Schur Complement Lemma into Equation (14) yields
According to Lemma 1, we have .
Therefore, according to (a) and (b), the state feedback controller = is a solution for the Tracking Problem □
Remark 1.
Different from the GARE approach, this LMI approach can be combined with other LMI constraints, such as input saturation [25].
4. Compensator Design
Base on the nominal controller, the compensator for the nominal controller is introduced in this section.
4.1. Compensator for Nominal Controller
Assume is a bounded Lipschitz continuous reference such that
where , is the eigenvalue of the i-th output of the above linear system. The reference is stable when , or equivalently, .
If h is a known constant matrix, applying the Laplace transfer into Equation (23), we obtain
where the initial reference is assumed to be zero. Three classic references are shown in Table 1. It indicates that the step reference is a special case of reference (23).

Table 1.
Three classic linear references.
By combining system (2) with the tracking reference (23), we obtain the following augmented system:
where , , , , 0, , = .
The state feedback controller of system (24) can be re-expressed as
Then, the diagram of the closed loop control system is shown in Figure 2.
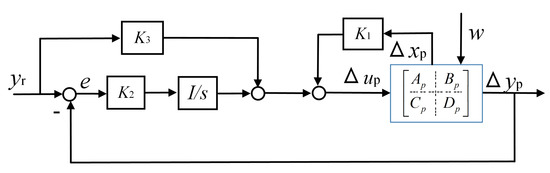
Figure 2.
Diagram of output tracking control with a constant h.
4.2. Compensator Design for Stable Reference
If h is a constant matrix, it seems that a robust controller for system (24) can be easily obtained according to Theorem 1. However, in practical application, h is time-variant and usually unknown in advance. According to Equation (23), we can obtain online as follows:
With this real-time , it is still difficult to calculate the controller (25) online because the solvability of LMIs (13) and (14) in Theorem 1 is hard to be guaranteed. To deal with this problem, a real-time compensator for the proposed nominal controller is introduced in the following theorem:
Theorem 2.
Proof.
Let a symmetric positive define matrix be a solution for the GARE as follows:
where and .
If Equations (29)–(31) are solvable, then the controller is a solution for the Tracking Problem according to the proof of Theorem 1.
Because satisfies LMIs (13) and (14), Equation (29) is apparently solvable, and the system (9) is asymptotically stable, which indicates .
Equations (30) and (31) are equivalent to the following two equations:
where denotes the column vector obtained by stacking the columns of the matrix, e.g., , and ⊗ denotes the Kronecher product multiplicator.
Therefore, the controller is a solution for for the Tracking Problem of system (24). □
The controller can be re-expressed as:
The structure diagram is shown in Figure 3.
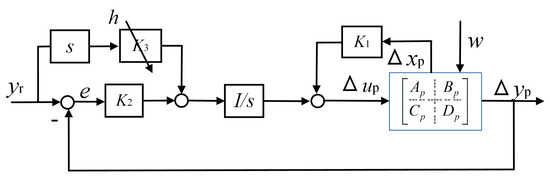
Figure 3.
Diagram of output tracking control for a bounded reference.
4.3. Compensator Design for Bounded Reference
The reference is usually given by the power level angle, which is controlled by the pilot in real time, and thereby does not always hold in practical application. When , there may be no solution for Equations (29) and (31). The reference expressed in Equation (23) can be seen as a bounded subsystem, and thereby the instability is a power-bounded disturbance imposed on the following system
5. Simulation Results
In order to validate the effectiveness of the proposed approach, it was applied to a locally linear system of a turbofan engine in [26]. The linear model is as follows:
where , , , , and denote the low-pressure speed, high-pressure speed, the fuel flow, the area of the nozzle throat, and the engine pressure ratio, respectively.
Here, control strategy 1 (CS1) is nominal tracking control with a compensator, control strategy 2 (CS2) is nominal tracking control introduced in MOP (22), and control strategy 3 (CS3) is a robust tracking controller proposed in [21].
Considering both tracking performance and robust performance, we choose Q = , R = . For CS1 and CS2, according to Theorem 1 and MOP (22), we obtian and
The compensator in CS1 is calculated by the current output reference in an online mode according to Equation (36).
Figure 4 shows the tracking performance of the three controllers for a linear reference with a ramp as follows:
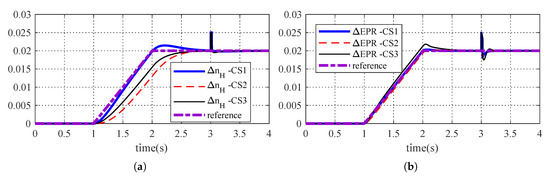
Figure 4.
Output response for the ramp reference. (a) tracking curve; (b) tracking curve.
As can be seen from Figure 4, the tracking performance of CS2 is better than that of CS3. It indicates that the nominal controller derived from GARE is more conservative than CS3 proposed in [21]. However, the system output response of CS1 is closer to the tracking reference than that of CS2 and CS3, which indicates that the compensator designed for the nominal controller CS2 can evidently improve the tracking performance. An instantaneous disturbance is added to the output at . When the disturbance disappears, all of the controllers can drive the output close to reference very quickly, which indicates that the proposed controller CS1 has a strong robustness as well as CS3 does.
The next simulation is carried out for an exponential reference to compare the control quality of the three control strategies in Figure 5. The reference is as follows:
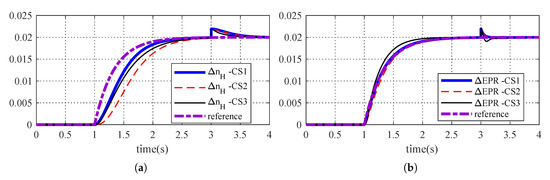
Figure 5.
Output response for the exponential reference. (a) tracking curve; (b) tracking curve.
As is demonstrated in Figure 5, the tracking performance of CS1 is better than those of CS2 and CS3. A continuous disturbance is added to the output at . The proposed controller can still track the reference due to its strong robustness.
Figure 6 shows output response for a sine reference:
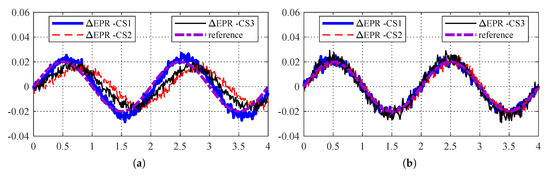
Figure 6.
Output response for sine reference. (a) tracking curve; (b) tracking curve.
A Gaussian white noise is added to the output. From Figure 6a,b, we can see that the output curve of CS1 has better tracking performance than those of CS2 and CS3. The variation of the elements in the matrix over time is shown in Figure 7.
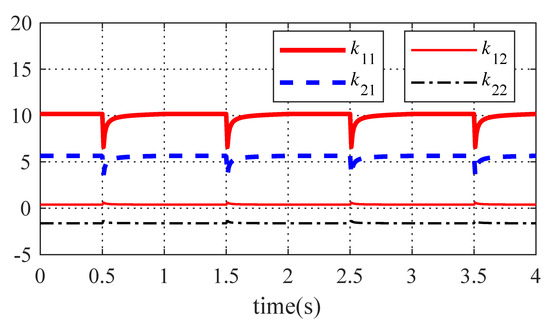
Figure 7.
The elements of .
The root mean square error (RMSE) values of responses of different references are listed in Table 2, which is defined to evaluate the tracking performance, as follows:
where denotes the tracking error in the i-th discrete time step, and the sampling time is 0.01 s.
Table 2.
RMSE of responses of different references.
As can be seen from Table 2, the bold numbers stand for the best tracking performance among the three approaches, and thereby the tracking performance of CS1 is evidently more accurate than that of CS2 and CS3, which indicates that compensator enables the output trajectory of CS1 to be closer to the sine reference.
6. Conclusions
In order to improve the tracking performance of the traditional robust tracker, a novel output tracking control approach is proposed by combining a nominal controller and a compensator. Firstly, a nominal output tracking controller was developed for a step reference. Subsequently, a compensator is calculated online according to the nominal controller and the current reference. The sovability of the compensator is ensured for both stable and bounded unstable references.
The proposed approach is compared with the traditional robust tracking approach through numerical simulations. Compared to the traditional robust tracker, the proposed controller can enable the output to track the reference better for both stable and unbounded unstable references. Meanwhile, from the simulation results, the proposed controller can track the reference well under three kinds of disturbances, which indicates that it has strong robustness.
Due to the positive effect of the verification, further researche is encouraged: (a) The performance of the proposed approach will be studied in the presence of more uncertainties, such as model mismatch and the saturation of the actuator. (b) The algorithm will be verified on a hardware in the loop platform.
Author Contributions
Q.C. conceived the main idea, J.H. and Q.C. designed the model structure, Q.C. carried out the numerical experiments and analyzed the data, and M.P., F.L., and Q.C. wrote the paper. All authors have read and agreed to the published version of the manuscript.
Funding
This research was founded by the National Science and Technology Major Project (2017-V-0004-0054) and the Funding of the Jiangsu Innovation Program for Graduate Education (No. KYLX15_0255).
Conflicts of Interest
The authors declare that there is no conflict of interest.
References
- Coro, A.; Abasolo, M.; Aguirrebeitia, J.; Lopez De Lacalle, L. Inspection scheduling based on reliability updating of gas turbine welded structures. Adv. Mech. Eng. 2019, 11, 1–20. [Google Scholar] [CrossRef]
- Coro, A.; Macareno, L.; Aguirrebeitia, J.; Lopez de Lacalle, L. A methodology to evaluate the reliability impact of the replacement of welded components by additive manufacturing spare parts. Metals 2019, 9, 932. [Google Scholar] [CrossRef]
- Bhattacharyya, S.P.; Keel, L.H. Robust control: The parametric approach. In Advances in Control Education 1994; Elsevier: Amsterdam, The Netherlands, 1995; pp. 49–52. [Google Scholar]
- Wu, L.; Zhao, R.; Li, Y.; Chen, Y.H. Optimal Design of Adaptive Robust Control for the Delta Robot with Uncertainty: Fuzzy Set-Based Approach. Appl. Sci. 2020, 10, 3472. [Google Scholar] [CrossRef]
- Szuch, J.; Soeder, J.; Skira, C. Evaluation of an F100 Multivariable Control Using a Real-Time Enginesimulation; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1977. [Google Scholar]
- Athans, M.; Kapasouris, P.; Kappos, E.; Spang, H., I. Multivariable Control for the F-100 Engine Using the LQG/LTR Methodology; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1984; pp. 435–444. [Google Scholar]
- Zames, G. Feedback and optimal sensitivity: Model reference transformations, multiplicative seminorms, and approximate inverses. IEEE Trans. Autom. Control 1981, 26, 301–320. [Google Scholar] [CrossRef]
- Bernstein, D.S.; Haddad, W.M. LQG control with an H∞ performance bound: A riccati equation approach. In Proceedings of the 1988 American Control Conference, Atlanta, GA, USA, 15–17 June 1988; pp. 796–802. [Google Scholar]
- Moriwaki, K. Autonomous steering control for electric vehicles using nonlinear state feedback control. Nonlinear Anal. 2005, 63, e2257–e2268. [Google Scholar] [CrossRef]
- Kurishige, M.; Nishihara, O.; Kumamoto, H. A new control strategy to reduce steering torque without perceptible vibration for vehicles equipped with electric power steering. Automob. Technol. 2010, 132, 054504. [Google Scholar] [CrossRef]
- Härefors, M. Application of H∞ robust control to the RM12 jet engine. Control Eng. Pract. 1997, 5, 1189–1201. [Google Scholar] [CrossRef]
- Ben, N.; Bacem, B.; Khaled, D.; Michael, D.; Mohamed, H.; Mohamed, A. State feedback stabilization of a class of uncertain nonlinear systems on non-uniform time domains. Syst. Control Lett. 2016, 97, 18–26. [Google Scholar]
- Wu, H.; Feng, S.; Liu, Z.; Guo, L. Disturbance observer based robust mixed H2/H∞ fuzzy tracking control for hypersonic vehicles. Fuzzy Sets Syst. 2017, 306, 118–136. [Google Scholar] [CrossRef]
- Liu, M.; Dong, Z. Multiobjective robust H2/H∞ fuzzy tracking control for thermal system of power plant. J. Process Control 2018, 70, 47–64. [Google Scholar] [CrossRef]
- Yang, D.; Zhao, J. H infinity output tracking control for a class of switched LPV systems and its application to an aero-engine model. Int. J. Robust Nonlinear Control 2017, 27, 2102–2120. [Google Scholar] [CrossRef]
- Liao, F.; Wang, J.L.; Yang, G.H. Reliable robust flight tracking control: An LMI approach. IEEE Trans. Control Syst. Technol. 2002, 10, 76–89. [Google Scholar] [CrossRef]
- Athans, M.; Falb, P. Optimal control: An introduction to theory and its applications. In SERBIULA (Sistema Librum 2.0); Wiley: Hoboken, NJ, USA, 1966. [Google Scholar]
- Lewis, F.; Vrabie, D.; Syrmos, V. Optimal Control, 3rd ed.; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Bauer, P.; Bokor, J. Development and performance evaluation of an infinite horizon LQ optimal tracker. Eur. J. Control 2018, 39, 8–20. [Google Scholar] [CrossRef]
- Ahmed, H.; Ríos, H.; Ayalew, B.; Wang, Y. Robust Output Tracking Control for Van der Pol Oscillator: A Sliding-Mode Differentiator Approach. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Y.; Deng, S. A novel emergent state control law for an integrated helicopter/turboshaft engine system. Math. Probl. Eng. 2014, 2014, 385807. [Google Scholar] [CrossRef]
- Bruzelius, F.; Breitholtz, C.; Pettersson, S. LPV-based gain scheduling technique applied to a turbo fan engine model. Int. Conf. Control Appl. 2002, 2, 713–718. [Google Scholar]
- Modares, H.; Lewis, F.L.; Jiang, Z. H∞ tracking control of completely unknown continuous-time systems via Off-Policy Reinforcement Learning. IEEE Trans. Neural Netw. 2015, 26, 2550–2562. [Google Scholar] [CrossRef] [PubMed]
- Yu, L. Robust Control-Linear Matrix Inequalities Approach; Tsinghua University Press: Beijing, China, 2002; Chapter 2; pp. 31–32. [Google Scholar]
- Lofberg, J. YALMIP: A toolbox for modeling and optimization in MATLAB. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation (IEEE Cat. No.04CH37508), New Orleans, LA, USA, 2–4 September 2004; pp. 284–289. [Google Scholar]
- Chen, Q.; Huang, J.; Pan, M.; Lu, F. A novel real-time mechanism modeling approach for turbofan engine. Energies 2019, 12, 3791. [Google Scholar] [CrossRef]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).