A Novel Approach to Fixed-Time Stabilization for a Class of Uncertain Second-Order Nonlinear Systems



{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries
2.1. Problem Formulation
2.2. Technical Lemmas
3. Fixed-Time Stabilizing Controller Design
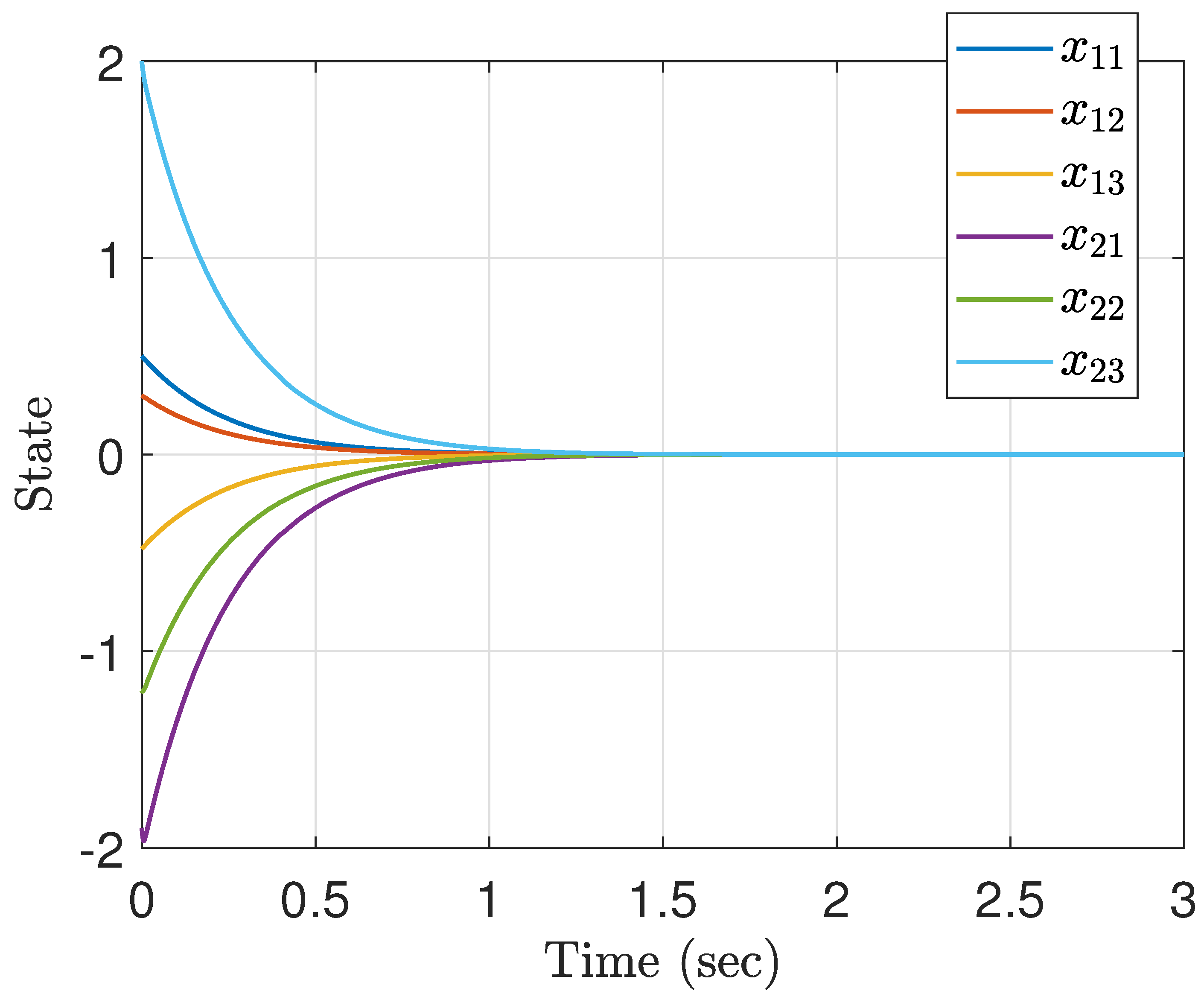
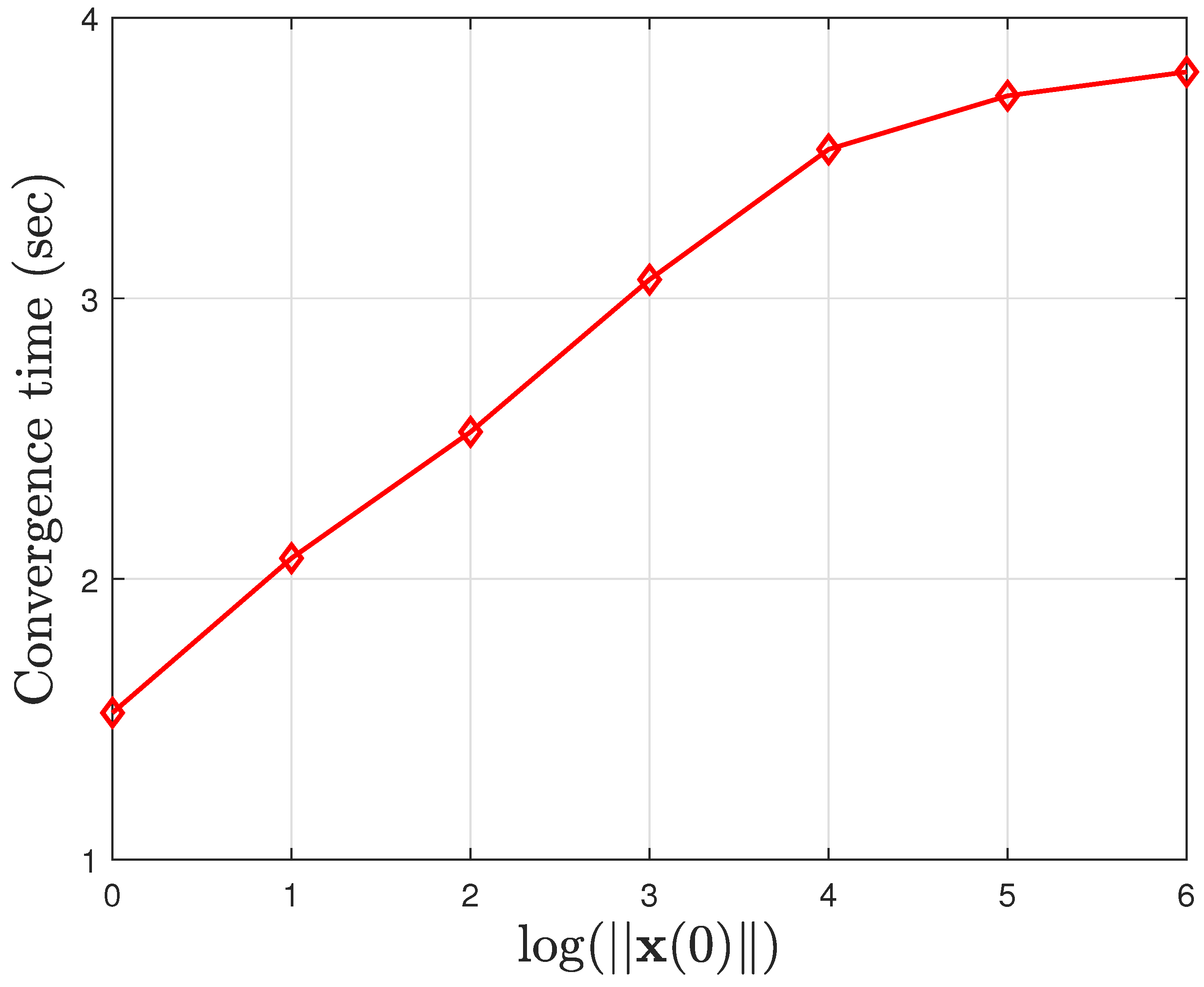
4. Simulation Studies
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Proof of V(x) Being Positive Definite
Appendix A.2. Proof of Properness of V(x)
Appendix A.3. Proof of V(x) Being Continuously Differentiable
References
- Krstic, M.; Kanellakopoulos, I.; Kokotovic, P.V. Nonlinear and Adaptive Control Design; John Wiley: New York, NY, USA, 1995. [Google Scholar]
- Isidori, A. Nonlinear Control Systems, 3rd ed.; Springer: New York, NY, USA, 1995. [Google Scholar]
- Ding, S.; Mei, K.; Li, S. A new second-order sliding mode and its application to nonlinear constrained systems. IEEE Trans. Autom. Control. 2019, 64, 2545–2552. [Google Scholar] [CrossRef]
- Wang, L.X. Stable adaptive fuzzy control of nonlinear systems. IEEE Trans. Fuzzy Syst. 1993, 1, 146–155. [Google Scholar] [CrossRef]
- Xiang, Z.; Qiao, C.; Mahmoud, S. Finite-time analysis and H∞ control for switched stochastic systems. J. Frankl. Inst. 2012, 349, 915–927. [Google Scholar] [CrossRef]
- Ding, S.; Li, S.; Zheng, W.X. Nonsmooth stabilization of a class of nonlinear cascaded systems. Automatica 2012, 48, 2597–2606. [Google Scholar] [CrossRef]
- Du, H.; Qian, C.; Li, S.; Chu, Z. Global sampled-data output feedback stabilization for a class of uncertain nonlinear systems. Automatica 2019, 99, 403–411. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhang, J.; Du, H.; Wen, G.; Lin, X. Global event-triggered output feedback stabilization of a class of nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2019, in press. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control. Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Moulay, E.; Perruquetti, W. Finite time stability conditions for non-autonomous continuous system. Int. J. Control. 2008, 81, 797–803. [Google Scholar] [CrossRef]
- Liu, Y. Global finite-time stabilization via time-varying feedback for uncertain nonlinear systems. SIAM J. Control. Optim. 2014, 52, 1886–1913. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Xue, L.R.; Zhang, K. A new approach to finite-time adaptive stabilization of high-order uncertain nonlinear system. Automatica 2015, 58, 60–66. [Google Scholar] [CrossRef]
- Fang, L.; Ma, L.; Ding, S.; Zhao, D. Finite-time stabilization for a class of high-order stochastic nonlinear systems with an output constraint. Appl. Math. Comput. 2019, 358, 63–79. [Google Scholar] [CrossRef]
- Shen, Y.; Huang, Y. Global finite-time stabilisation for a class of nonlinear systems. Int. J. Syst. Sci. 2012, 43, 73–78. [Google Scholar] [CrossRef]
- Huang, S.; Xiang, Z. Finite-time stabilisation of a class of switched nonlinear systems with state constraints. Int. J. Control. 2018, 91, 1300–1313. [Google Scholar] [CrossRef]
- Chen, C.C.; Sun, Z.Y. A unified approach to finite-time stabilization of high-order nonlinear systems with an asymmetric output constraint. Automatica 2019, in press. [Google Scholar] [CrossRef]
- Wu, D.; Du, H.; Wen, G.; Lü, J. Fixed-time synchronization control for a class of master-slave systems based on homogeneous method. IEEE Trans. Circuits Syst. II Express Briefs 2019, in press. [Google Scholar] [CrossRef]
- Chen, C.C. A unified approach to finite-time stabilization of high-order nonlinear systems with and without an output constraint. Int. J. Robust Nonlinear Control. 2019, 29, 393–407. [Google Scholar] [CrossRef]
- Zhai, J.; Song, Z.; Karimi, H.R. Global finite-time control for a class of switched nonlinear systems with different powers via output feedback. Int. J. Syst. Sci. 2018, 49, 2776–2783. [Google Scholar] [CrossRef]
- Man, Z.; Paplinski, A.P.; Wu, H.R. A robust MIMO terminal sliding mode control scheme for rigid robotic manipulators. IEEE Trans. Autom. Control. 1994, 39, 2464–2496. [Google Scholar]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Xu, S.S.D.; Chen, C.C.; Wu, Z.L. Study of nonsingular fast terminal sliding-mode fault-tolerant control. IEEE Trans. Ind. Electron. 2015, 62, 3906–3913. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control. 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Chen, C.C.; Sun, Z.Y. Fixed-time stabilisation for a class of high-order nonlinear systems. IET Control. Theory Appl. 2018, 12, 2578–2587. [Google Scholar] [CrossRef]
- Cruz-Zavala, E.; Moreno, J.A.; Fridman, L.M. Uniform robust exact differentiator. IEEE Trans. Autom. Control. 2011, 56, 2727–2733. [Google Scholar] [CrossRef]
- Gao, F.; Wu, Y.; Zhang, Z.; Liu, Y. Global fixed-time stabilization for a class of switched nonlinear systems with general powers and its application. Nonlinear Anal. Hybrid Syst. 2019, 31, 56–68. [Google Scholar] [CrossRef]
- Basin, M.; Shtessel, Y.; Aldukali, F. Continuous finite- and fixed-time high-order regulators. J. Frankl. Inst. 2016, 353, 5001–5012. [Google Scholar] [CrossRef]
- Zuo, Z. Nonsingular fixed-time consensus tracking for second-order multi-agent networks. Automatica 2015, 54, 305–309. [Google Scholar] [CrossRef]
- Zuo, Z.; Han, Q.L.; Ning, B.; Ge, X.; Zhang, X.M. An overview of recent advances in fixed-time cooperative control of multiagent systems. IEEE Trans. Ind. Inf. 2018, 14, 2322–2334. [Google Scholar] [CrossRef]
- Ni, J.; Liu, L.; Liu, C.; Hu, X.; Li, S. Fast fixed-time nonsingular terminal sliding mode control and its application to chaos suppression in power system. IEEE Trans. Circuits Syst. II Express Briefs 2017, 64, 151–155. [Google Scholar] [CrossRef]
- Basin, M.; Panathula, C.B.; Shtessel, Y. Multivariable continuous fixed-time secondorder sliding mode control: design and convergence time estimation. IET Control. Theory Appl. 2017, 11, 1104–1111. [Google Scholar] [CrossRef]
- Polyakov, A.; Efimov, D.; Perruquetti, W. Robust stabilization of MIMO systems in finite/fixed time. Int. J. Robust Nonlinear Control. 2016, 26, 69–90. [Google Scholar] [CrossRef]
- Jiang, B.; Hu, Q.; Friswell, M.I. Fixed-time attitude control for rigid spacecraft with actuator saturation and faults. IEEE Trans. Control. Syst. Technol. 2016, 24, 1892–1898. [Google Scholar] [CrossRef]
- Qian, C.; Lin, W. A continuous feedback approach to global strong stabilization of nonlinear systems. IEEE Trans. Autom. Control. 2001, 46, 1061–1079. [Google Scholar] [CrossRef]
- Chen, C.C.; Xu, S.S.D.; Liang, Y.W. Study of nonlinear integral sliding mode fault-tolerant control. IEEE/ASME Trans. Mechatron. 2016, 21, 1160–1168. [Google Scholar] [CrossRef]
- Xiao, B.; Yang, X.; Karimi, H.K.; Qiu, J. Asymptotic tracking control for a more representative class of uncertain nonlinear systems with mismatched uncertainties. IEEE Trans. Ind. Electron. 2019, in press. [Google Scholar] [CrossRef]
- Pan, Y.; Li, X.; Yu, H. Efficient PID tracking control of robotic manipulators driven by compliant actuators. IEEE Trans. Control. Syst. Technol. 2019. [Google Scholar] [CrossRef]
- Filippov, A.F. Differential Equations with Discontinuous Righthand Sides; Kluwer Academic Publishers: Dordrechts, The Netherlands, 1988. [Google Scholar]
- Orlov, Y. Finite time stability and robust control synthesis of uncertain switched systems. SIAM J. Control. Optim. 2004, 43, 1253–1271. [Google Scholar] [CrossRef]
- Chen, C.C.; Sun, Z.Y. A new approach to stabilisation of a class of nonlinear systems with an output constraint. Int. J. Control. 2019, in press. [Google Scholar] [CrossRef]
- Hardy, G.; Littlewood, J.; Polya, G. Inequalities; Cambridge University Press: Cambridge, UK, 1988. [Google Scholar]
- Royden, H.L.; Fitzpatrik, P.M. Real Analysis, 4th ed.; Pearson: Upper Saddle River, NJ, USA, 2010. [Google Scholar]
- Bacciotti, A.; Rosier, L. Liapunov Functions and Stability in Control Theory, 2nd ed.; Springer: Berlin, Germany, 2005. [Google Scholar]
- Chobotov, V.A. Spacecraft Attitude Dynamics and Control; Krieger: Malabare, FL, USA, 1991. [Google Scholar]
- Zoriach, V.A. Mathematical Analysis II; Springer: Berlin, Germany, 2016. [Google Scholar]



© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.-C.; Chen, G.-S. A Novel Approach to Fixed-Time Stabilization for a Class of Uncertain Second-Order Nonlinear Systems. Appl. Sci. 2020, 10, 424. https://doi.org/10.3390/app10010424
Chen C-C, Chen G-S. A Novel Approach to Fixed-Time Stabilization for a Class of Uncertain Second-Order Nonlinear Systems. Applied Sciences. 2020; 10(1):424. https://doi.org/10.3390/app10010424
Chicago/Turabian StyleChen, Chih-Chiang, and Guan-Shiun Chen. 2020. "A Novel Approach to Fixed-Time Stabilization for a Class of Uncertain Second-Order Nonlinear Systems" Applied Sciences 10, no. 1: 424. https://doi.org/10.3390/app10010424
APA StyleChen, C.-C., & Chen, G.-S. (2020). A Novel Approach to Fixed-Time Stabilization for a Class of Uncertain Second-Order Nonlinear Systems. Applied Sciences, 10(1), 424. https://doi.org/10.3390/app10010424