
A Systematic Literature Review on PHM Strategies for (Hydraulic) Primary Flight Control Actuation Systems




Abstract
1. Introduction
1.1. Flight Control Computers, Electro-Hydraulic Actuators, and PHM
1.1.1. FCSs and Electro-Hydraulic Actuators
1.1.2. An Overview of How PHM Can Be Performed
- Data-Driven approaches are big data-focused techniques in which a large volume of historical data on the state of the asset is processed thanks to data analysis algorithms with different levels of explainability, Artificial Intelligence (AI) integration, and complexity [47]. As a result, useful information can be extracted from historical data to learn degradation trends and foresee the future health status without the need for precise knowledge of the system. Data-Driven methods, as the name implies, require a strong and solid database to rely on, which can be extracted from past observations or from models and simulations. Usually, Data-Driven methodologies are quick to implement and less expensive to build and deploy, but the reliance on a vast dataset covering a wide range of operational conditions limits the actual effectiveness of these strategies to the few cases when an extensive dataset is available. Other issues are often linked to the scarce generalization ability of the developed algorithms, which hardly extend to conditions not covered in the dataset. Usually, aerospace systems are designed with very high safety requirements stated by the relevant certification specification and, as a result, the failures are very limited. This behavior, called the “few-shot phenomenon”, leads to a very unbalanced dataset, with the faulty class being often underrepresented in the dataset. As a result, insufficient or imbalanced data may indeed jeopardize the strategy’s performance. Therefore, data quality and quantity must be assessed prior to the methodology definition.
- Knowledge-Based and Model-Based approaches share a lot of similarities as they rely on precise and detailed information on the system being analyzed. These strategies are usually more accurate, explainable, and precise, but, on the other hand, they suffer from high cost, time consumption, intensive computational costs, and the need for accurate and in-depth system knowledge.
- -
- Knowledge-Based PHM employs a priori knowledge about the system and utilizes expert knowledge and domain expertise to forecast the future performance and health of systems or machinery by integrating established knowledge, guidelines, and insights into the system’s physical properties, as well as historical performance data.
- -
- Physics-Based approaches, often referred to as Model-Based or Physics-of-Failure (PoF) approaches, leverage a comprehensive understanding of the underlying physical principles and dynamics of a system to forecast its future performance and health status. They are based on the use of an analytical model, able to describe the monitored system in a mathematical way. Models can be designed with different architectures depending on the required level of detail and hierarchy of the system being investigated. The models are established on physical equations and mathematical frameworks that describe the system’s operation, taking into account variables such as material properties, structural dynamics, forces, vibrations, and other relevant physical phenomena. In particular, PoF refers to the modeling of the degradation process under examination.
- Finally, the Hybrid approach combines both Model-Based and Data-Driven approaches, keeping their advantages [48,49,50,51]. Some new initiatives in recent years involve physics-informed approaches in various neural network architectures, with the aim of integrating the strong Data-Driven behavior with the generalization and robustness quality of analytical processes [52,53]. Physics-informed machine learning integrates (noisy) data and mathematical models, combining them through neural networks or other Deep Learning (DL) strategies. The prior knowledge of general physical laws can be embedded in various ways: for instance, in the loss function of the DL algorithms, inside neurons, or as regularization agents. In this way, the physical knowledge of the system is intertwined with the powerful DL architecture in a Hybrid fashion [27,53,54,55,56,57,58,59].
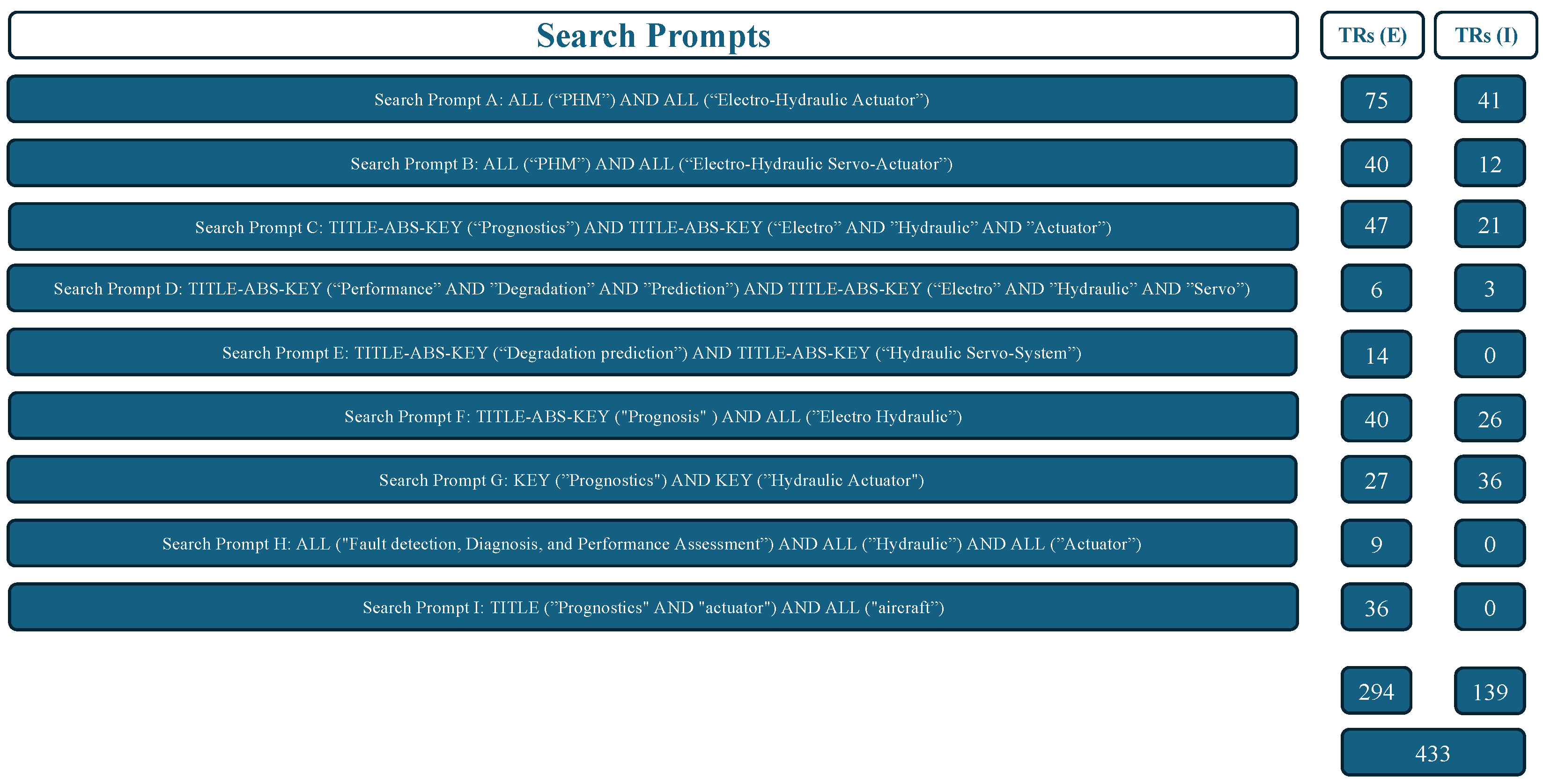
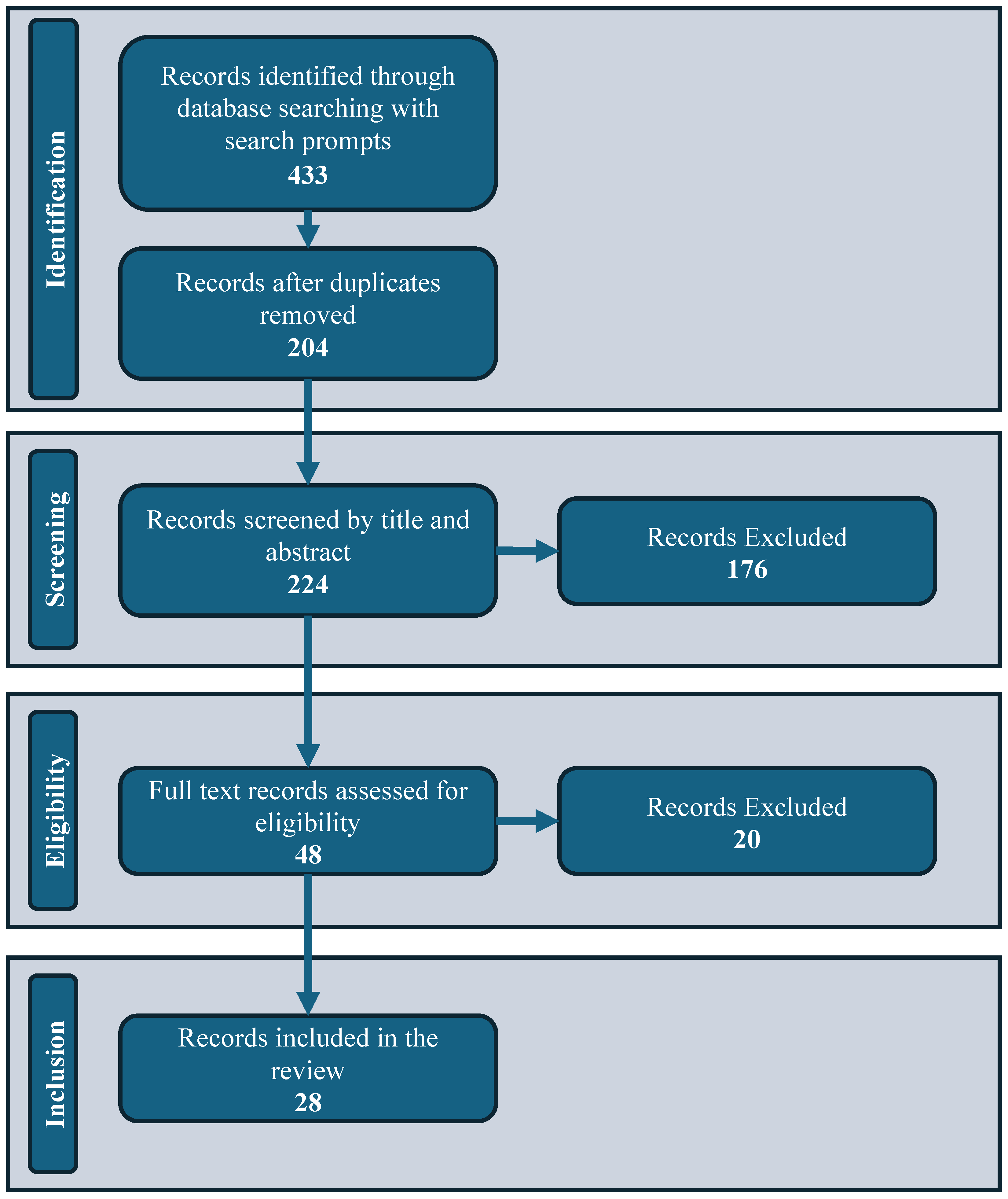
2. Systematic Literature Review Protocol and Methodology
- Population: What is being studied?
- Intervention: What action or approach is being implemented?
- Comparison: What is being used as a comparison?
- Outcome: What objectives or improvements are being sought?
- Context: In what organization or circumstances is this occurring?
- Population: EHA-powered primary flight controls actuators.
- Intervention: PHM strategies.
- Comparison: Existing prognostic techniques used to identify and predict faults in EHAs.
- Outcome: Availability increase and cost-effectiveness.
- Context: Commercial aviation sector.
- RQ1: What is the state-of-the-art of PHM in EHAs for primary flight controls?
- RQ2: What are the most prominent authors, affiliations, and geographic areas with the highest number of records?
- RQ3: Which are the most used approaches (Data-Driven, Model-Based, Hybrid) for diagnosis and prognosis?
- RQ4: Which are the most investigated components and fault modes?
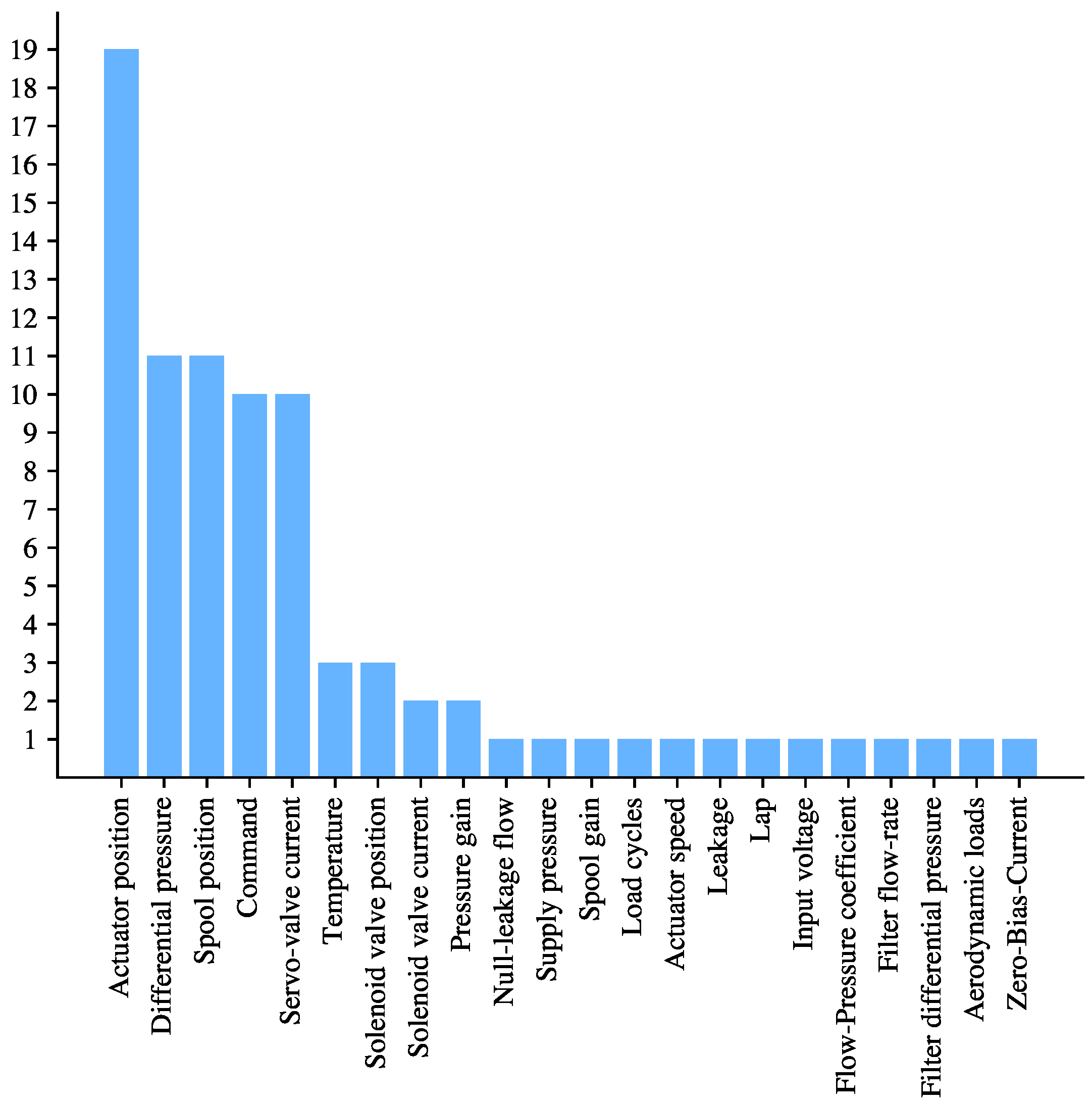
- RQ5: Which are the most commonly used signals?
- RQ6: Which methods and techniques are the most used ones?
- RQ7: What are the current challenges that prevent PHM solutions for primary flight controls from increasing the product availability and cost-effectiveness?
- IC1: The study must be related to PHM for EHAs in flight control actuators (both for fixed wing and rotary wing).
- IC2: The articles must develop at least a prognosis methodology (e.g., diagnostic-only papers are not considered).
- IC3: The study must include full text (e.g., abstract-only papers are excluded).
- IC4: Articles with prognosis and diagnosis are included.
- IC5: No period limitations have been applied, as the PHM field is quite recent, and no limitations on the type, accessibility, or impact of the source have been implemented either.
- EC1: The analysis of PHM methodologies for EMAs and Electro-HydroStatic Actuators (EHSAs) [62] has been excluded.
- EC2: Rotary actuators are excluded since they are not employed in primary flight control actuation systems where linear actuators are required.
- EC3: The analysis of the possible integration of these strategies in more complex frameworks (e.g., maintenance and scheduling optimization) is also not taken into consideration. Even if they are very significant and key drivers for the development of PHM systems themselves, including these additional topics would make this review much less readable and would require a separate study, such as the one carried out by M. J. Scott et al. in [63].
- EC4: Articles with only the diagnostic layer are excluded.
- EC5: Articles not in English or not publicly available have been excluded.
3. Discussion
3.1. RQ1: What Is the State of the Art of PHM in EHAs for Primary Flight Controls?
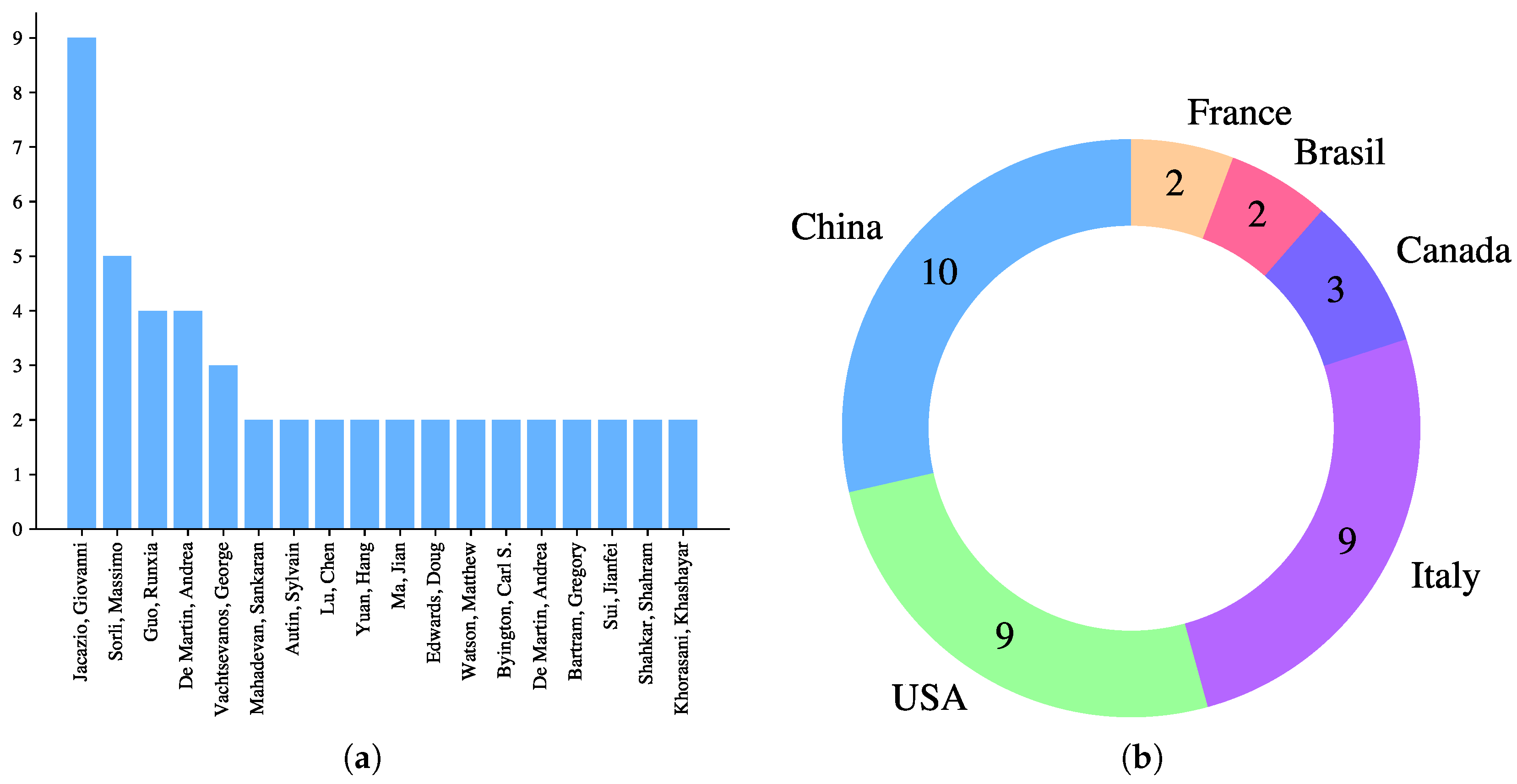
3.2. RQ2: What Are the Most Prominent Authors, Affiliations, and Geographic Areas with the Highest Number of Records?
- Jacazio Giovanni and Sorli Massimo from Politecnico di Torino, Italy.
- Guo Runxia from Civil Aviation University of China, China.
- De Martin Andrea from Politecnico di Torino, Italy.
- Vachtsevanos George from Georgia Institute of Technology, USA.
3.3. RQ3: Which Are the Most Used Approaches (Data-Driven, Model-Based, Hybrid) for Diagnosis and Prognosis?


3.4. RQ4: Which Are the Most Investigated Components and Fault Modes?
3.5. RQ5: Which Are the Most Commonly Used Signals?
3.6. RQ6: Which Methods and Techniques Are the Most Used Ones?
3.6.1. The Need for Uncertainty Assessment and Bayesian Algorithms
3.6.2. AI Implementation and the Necessity of Explainability and Robustness
3.6.3. Observers and Simplicity
3.7. RQ7: What Are the Current Challenges That Prevent PHM Solutions for Primary Flight Controls from Increasing the Product Availability and Cost-Effectiveness?
3.7.1. Technical Challenges
Actuator System Knowledge and Degradation Models
Few-Shots Phenomenon and Data Imbalance
Data Availability, Quality, and Intellectual Property Rights
Knowledge Integration
Lack of Objective and Universally Recognized Evaluation Metrics
3.7.2. Organizational and Business Challenges
EMAs
Industries Organization
Demonstration of an Acceptable Return on Investment
4. Conclusions and Future Directions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. No. | Approached PHM Layer(s) |
|---|---|
| [64] | Diagnosis, Prognosis |
| [65] | Diagnosis, Prognosis |
| [66] | Diagnosis, Prognosis |
| [67] | Diagnosis, Prognosis |
| [68] | Diagnosis, Prognosis |
| [69] | PerfAss |
| [70] | Diagnosis, PerfAss |
| [71] | Diagnosis, Prognosis |
| [72] | Diagnosis, Prognosis |
| [73] | Diagnosis, Prognosis |
| [74] | Diagnosis, Prognosis |
| [75] | Prognosis |
| [76] | Diagnosis, Prognosis |
| [77] | Diagnosis, PerfAss |
| [78] | Diagnosis, Prognosis |
| [79] | Diagnosis, Prognosis |
| [80] | Prognosis |
| [81] | Prognosis |
| [82] | Diagnosis, Prognosis |
| [83] | Prognosis |
| [84] | Diagnosis, Prognosis |
| [85] | Diagnosis, Prognosis |
| [86] | Diagnosis, Prognosis |
| [87] | Diagnosis, Prognosis |
| [88] | Diagnosis, Prognosis |
| [89] | Diagnosis, Prognosis |
| [90] | Prognosis |
| [91] | PerfAss |
| Ref. No. | Strategy DS | Strategy PS | Overall Strategy |
|---|---|---|---|
| [64] | Data-Driven | Data-Driven | Data-Driven |
| [65] | Data-Driven | Data-Driven | Data-Driven |
| [66] | Model-Based | Model-Based | Model-Based |
| [67] | Model-Based | Data-Driven | Hybrid |
| [68] | Model-Based | Model-Based | Model-Based |
| [69] | - | Model-Based | Model-Based |
| [70] | Data-Driven | Data-Driven | Data-Driven |
| [71] | Model-Based | Model-Based | Model-Based |
| [72] | Data-Driven | Model-Based | Hybrid |
| [73] | Data-Driven | Data-Driven | Data-Driven |
| [74] | Model-Based | Data-Driven | Hybrid |
| [75] | - | Model-Based | Model-Based |
| [76] | Data-Driven | Model-Based | Hybrid |
| [77] | Data-Driven | Data-Driven | Data-Driven |
| [78] | Data-Driven | Model-Based | Hybrid |
| [79] | Model-Based | Model-Based | Model-Based |
| [80] | - | Model-Based | Model-Based |
| [81] | - | Model-Based | Model-Based |
| [82] | Data-Driven | Model-Based | Hybrid |
| [83] | - | Data-Driven | Data-Driven |
| [84] | Data-Driven | Model-Based | Hybrid |
| [85] | Data-Driven | Model-Based | Hybrid |
| [86] | Data-Driven | Model-Based | Hybrid |
| [87] | Data-Driven | Model-Based | Hybrid |
| [88] | Data-Driven | Model-Based | Hybrid |
| [89] | Model-Based | Model-Based | Model-Based |
| [90] | - | Hybrid | Hybrid |
| [91] | - | Data-Driven | Data-Driven |
| Ref. No. | Focus Area | Faults (Functions) |
|---|---|---|
| [64] | Generic | Generic |
| [65] | Generic | Generic |
| [66] | Filter | Clogging |
| [67] | Filter, Motor, Spool | Clogging, Backlash, Friction, Clearance |
| [68] | Cylinder | Leakage |
| [69] | Structure | Wear |
| [70] | Cylinder | Leakage, Generic |
| [71] | Cylinder | Leakage |
| [72] | Filter, Motor, Feedback spring, Spool | Clogging, Motor degradation, Backlash, Friction, Clearance |
| [73] | Cylinder, Amplifier | Leakage, Amplifier Fault |
| [74] | Generic | Generic |
| [75] | Cylinder | Leakage |
| [76] | Cylinder | Leakage |
| [77] | Cylinder, Amplifier, Motor | Leakage, Amplifier Fault, Motor Disconnection |
| [78] | Motor, Feedback spring, Mechanism | Motor degradation, Crack, Backlash |
| [79] | Spool, Amplifier | Leakage, NCB shift, Friction, Wear |
| [80] | Cylinder | Leakage |
| [81] | Structure | Crack |
| [82] | Cylinder, Amplifier, Spool | Leakage, NCB shift |
| [83] | Cylinder | Leakage |
| [84] | Feedback spring, Seals | Crack, Wear |
| [85] | Filter | Clogging |
| [86] | Feedback spring, Motor, Jet pipe, Mechanism | Motor degradation, Crack, Backlash, Deformation |
| [87] | Cylinder | Leakage |
| [88] | Mechanism, Feedback spring, Motor, Jet pipe, Seals, Sensor | Backlash, Crack, Short circuit, Motor degradation, Clogging, Deformation, Wear |
| [89] | Spool, Amplifier | Leakage, NCB shift, Friction, Wear |
| [90] | Generic | Generic |
| [91] | Structure | Wear |
| Ref. No. | Signals |
|---|---|
| [64] | Differential pressure, Servo-valve current, Command, Spool position |
| [65] | Act. position, Spool position, Differential pressure, Servo-valve current |
| [66] | Servo-valve current |
| [67] | Act. position, Spool position, Servo-valve current, Temperature |
| [68] | Command, Act. position, Spool position, Differential pressure |
| [69] | Pressure gain, Null-leakage flow, Lap |
| [70] | Command, Act. position |
| [71] | Command, Act. position, Spool position, Differential pressure |
| [72] | Act. position, Servo-valve current |
| [73] | Command, Act. position |
| [74] | Flow-Pressure coefficient, Spool gain |
| [75] | Act. position |
| [76] | Command, Act. position, Spool position, Differential pressure, Servo-valve current, Temperature, Supply pressure |
| [77] | Command, Act. position, Aerodynamic loads |
| [78] | Command, Act. position, Spool position, Differential pressure, Servo-valve current, Solenoid valve current, Solenoid valve position |
| [79] | Act. position |
| [80] | Act. position, Solenoid valve position |
| [81] | Load cycles |
| [82] | Command, Act. position |
| [83] | Differential pressure, Input voltage |
| [84] | Act. position, Servo-valve current |
| [85] | Act. position, Spool position, Differential pressure, Filter flow-rate, Filter differential pressure, Temperature |
| [86] | Command, Act. position, Spool position, Differential pressure, Servo-valve current, Solenoid valve current, Solenoid valve position |
| [87] | Spool position, Differential pressure, Act. speed |
| [88] | Act. position, Spool position, Differential pressure, Servo-valve current |
| [89] | Act. position |
| [90] | Zero-Bias-Current |
| [91] | Pressure gain, Leakage |
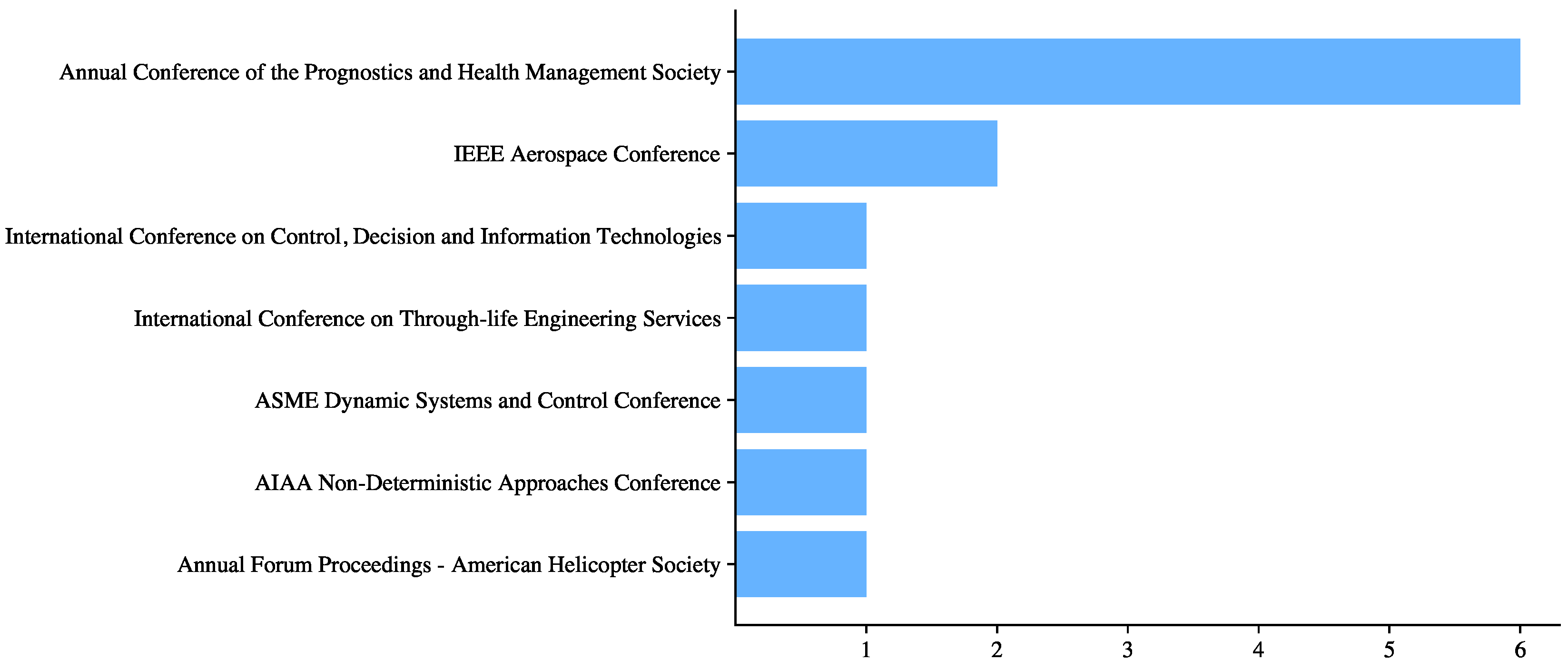
| Ref. No. | Source | Doc. Type |
|---|---|---|
| [64] | Annual Forum Proceedings—American Helicopter Society | Conference paper |
| [65] | IEEE Aerospace Conference | Conference paper |
| [66] | IEEE Aerospace Conference | Conference paper |
| [67] | Annual Conference of the Prognostics and Health Management Society | Conference paper |
| [68] | Annual Conference of the Prognostics and Health Management Society | Conference paper |
| [69] | Engineering Failure Analysis | Article |
| [70] | Applied Mathematical Modelling | Article |
| [71] | AIAA Non-Deterministic Approaches Conference | Conference paper |
| [72] | Annual Conference of the Prognostics and Health Management Society | Conference paper |
| [73] | Scientia Iranica | Article |
| [74] | ASME Dynamic Systems and Control Conference | Conference paper |
| [75] | IEEE Access | Article |
| [76] | International Conference on Through-life Engineering Services | Conference paper |
| [77] | Mechanical Systems and Signal Processing | Article |
| [78] | Annual Conference of the Prognostics and Health Management Society | Conference paper |
| [79] | International Conference on Control, Decision and Information Technologies | Conference paper |
| [80] | Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering | Article |
| [81] | IEEE Transactions on Instrumentation and Measurement | Article |
| [82] | IEEE Systems Journal | Article |
| [83] | Proceedings of the Institution of Mechanical Engineers. Part I: Journal of Systems and Control Engineering | Article |
| [84] | Aerospace | Article |
| [85] | Annual Conference of the Prognostics and Health Management Society | Conference paper |
| [86] | International Journal of Prognostics and Health Management | Article |
| [87] | Actuators | Article |
| [88] | Annual Conference of the Prognostics and Health Management Society | Conference paper |
| [89] | IEEE Transactions on Control Systems Technology | Article |
| [90] | IEEE Sensors Journal | Article |
| [91] | Applied Sciences | Article |
References
- Berri, P.C.; Dalla Vedova, M.D.L.; Mainini, L. Learning for predictions: Real-time reliability assessment of aerospace systems. AIAA J. 2022, 60, 566–577. [Google Scholar] [CrossRef]
- Sarlioglu, B.; Morris, C.T. More Electric Aircraft: Review, Challenges, and Opportunities for Commercial Transport Aircraft. IEEE Trans. Transp. Electrif. 2015, 1, 54–64. [Google Scholar] [CrossRef]
- Chen, W.B.; Li, X.Y.; Kang, R. Attractor based performance characterization and reliability evolution for electromechanical systems. Mech. Syst. Signal Process. 2025, 222, 111803. [Google Scholar] [CrossRef]
- Yin, Z.; Hu, N.; Chen, J.; Yang, Y.; Shen, G. A review of fault diagnosis, prognosis and health management for aircraft electromechanical actuators. IET Electr. Power Appl. 2022, 16, 1249–1272. [Google Scholar] [CrossRef]
- Zio, E. Prognostics and Health Management (PHM): Where are we and where do we (need to) go in theory and practice. Reliab. Eng. Syst. Saf. 2022, 218, 108119. [Google Scholar] [CrossRef]
- Kordestani, M.; Orchard, M.E.; Khorasani, K.; Saif, M. An Overview of the State of the Art in Aircraft Prognostic and Health Management Strategies. IEEE Trans. Instrum. Meas. 2023, 72, 1–15. [Google Scholar] [CrossRef]
- Lee, J.; de Pater, I.; Boekweit, S.; Mitici, M. Remaining-Useful-Life prognostics for opportunistic grouping of maintenance of landing gear brakes for a fleet of aircraft. In Proceedings of the PHM Society European Conference, Torino, Italy, 6–8 July 2022; Volume 7, pp. 278–285. [Google Scholar] [CrossRef]
- Kulkarni, C.; Schumann, J.; Roychoudhury, I. On-Board Battery Monitoring and Prognostics for Electric-Propulsion Aircraft. In Proceedings of the 2018 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Cincinnati, OH, USA, 12–14 July 2018; pp. 1–12. [Google Scholar]
- Mitici, M.; Hennink, B.; Pavel, M.; Dong, J. Prognostics for Lithium-ion batteries for electric Vertical Take-off and Landing aircraft using Data-Driven machine learning. Energy AI 2023, 12, 100233. [Google Scholar] [CrossRef]
- Saxena, A.; Goebel, K.; Simon, D.; Eklund, N. Damage propagation modeling for aircraft engine run-to-failure simulation. In Proceedings of the 2008 International Conference on Prognostics and Health Management, Denver, CO, USA, 6–9 October 2008; pp. 1–9. [Google Scholar] [CrossRef]
- Saha, B.; Goebel, K. Battery Data Set; NASA Prognostics Data Repository, NASA Ames Research Center: Moffett Field, CA, USA, 2007. Available online: https://www.nasa.gov/content/prognostics-center-of-excellence-data-set-repository (accessed on 30 July 2025).
- Lee, J.; Qiu, H.; Yu, G.; Lin, J.; Rexnord Technical Services. Bearing Data Set; IMS, University of Cincinnati, NASA Prognostics Data Repository, NASA Ames Research Center: Moffett Field, CA, USA, 2007. Available online: https://www.nasa.gov/content/prognostics-center-of-excellence-data-set-repository (accessed on 30 July 2025).
- Arias Chao, M.; Kulkarni, C.; Goebel, K.; Fink, O. Aircraft Engine Run-to-Failure Dataset under Real Flight Conditions for Prognostics and Diagnostics. Data 2021, 6, 5. [Google Scholar] [CrossRef]
- Pérez-Ruiz, J.L.; Tang, Y.; Loboda, I.; Miró-Zárate, L.A. An Integrated Monitoring, Diagnostics, and Prognostics System for Aero-Engines under Long-Term Performance Deterioration. Aerospace 2024, 11, 217. [Google Scholar] [CrossRef]
- Rath, N.; Mishra, R.K.; Kushari, A. Aero engine health monitoring, diagnostics and prognostics for condition-based maintenance: An overview. Int. J. Turbo Jet-Engines 2023, 40, s279–s292. [Google Scholar] [CrossRef]
- Rodrigues, L.R. Remaining Useful Life Prediction for Multiple-Component Systems Based on a System-Level Performance Indicator. IEEE/ASME Trans. Mechatronics 2018, 23, 141–150. [Google Scholar] [CrossRef]
- Mo, H.; Sansavini, G.; Xie, M. Performance-based maintenance of gas turbines for reliable control of degraded power systems. Mech. Syst. Signal Process. 2018, 103, 398–412. [Google Scholar] [CrossRef]
- Dui, H.; Zhang, S.; Dong, X.; Wu, S. Digital twin-enhanced opportunistic maintenance of smart microgrids based on the risk importance measure. Reliab. Eng. Syst. Saf. 2025, 253, 110548. [Google Scholar] [CrossRef]
- Ab-Samat, H.; Kamaruddin, S. Opportunistic maintenance (OM) as a new advancement in maintenance approaches: A review. J. Qual. Maint. Eng. 2014, 20, 98–121. [Google Scholar] [CrossRef]
- Stanton, I.; Munir, K.; Ikram, A.; El-Bakry, M. Predictive maintenance analytics and implementation for aircraft: Challenges and opportunities. Syst. Eng. 2023, 26, 216–237. [Google Scholar] [CrossRef]
- Verhagen, W.J.C.; De Boer, L.W.M. Predictive maintenance for aircraft components using proportional hazard models. J. Ind. Inf. Integr. 2018, 12, 23–30. [Google Scholar] [CrossRef]
- Marques, H.; Giacotto, A. Prescriptive Maintenance: Building Alternative Plans for Smart Operations. In Proceedings of the The 10th Aerospace Technology Congress, Stockholm, Sweden, 8–9 October 2019; pp. 231–236. [Google Scholar] [CrossRef]
- Verhagen, W.J.C.; Santos, B.F.; Freeman, F.; van Kessel, P.; Zarouchas, D.; Loutas, T.; Yeun, R.C.K.; Heiets, I. Condition-Based Maintenance in Aviation: Challenges and Opportunities. Aerospace 2023, 10, 762. [Google Scholar] [CrossRef]
- Ulansky, V.; Raza, A. A historical survey of condition-based maintenance models with imperfect inspections: Cases of constant and non-constant probabilities of inspection outcomes. Reliab. Eng. Syst. Saf. 2025, 254, 110544. [Google Scholar] [CrossRef]
- Hu, Y.; Miao, X.; Si, Y.; Pan, E.; Zio, E. Prognostics and Health Management: A Review from the Perspectives of Design, Development and Decision. Reliab. Eng. Syst. Saf. 2022, 217, 108063. [Google Scholar] [CrossRef]
- Maré, J.C. Aerospace Actuators 2: Signal-by-Wire and Power-by-Wire; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Kim, W.; Youn, B.D. Physics-Based Digital Twin Updating and Twin-Based Explainable Crack Identification of Mechanical Lap Joint. Reliab. Eng. Syst. Saf. 2025, 253, 110515. [Google Scholar] [CrossRef]
- Errandonea, I.; Beltrán, S.; Arrizabalaga, S. Digital Twin for Maintenance: A Literature Review. Comput. Ind. 2020, 123, 103316. [Google Scholar] [CrossRef]
- Ezhilarasu, C.M.; Skaf, Z.; Jennions, I.K. Understanding the Role of a Digital Twin in Integrated Vehicle Health Management (IVHM). In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 1484–1491. [Google Scholar] [CrossRef]
- Dransfield, P. Hydraulic Control Systems Design and Analysis of Their Dynamics; Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 1981; Volume 33. [Google Scholar]
- Kang, J.; Yuan, Z.; Tariq Sadiq, M. Numerical simulation and experimental research on flow force and pressure stability in a nozzle-flapper servo valve. Processes 2020, 8, 1404. [Google Scholar] [CrossRef]
- Son, P.X.H.; Phuc, T.T. Comparison of jet pipe servo valve with flapper nozzle servo valve. Sci. Technol. Dev. J. 2017, 20, 78–83. [Google Scholar] [CrossRef]
- Brière, D.; Favre, C.; Traverse, P. A family of fault-tolerant systems: Electrical flight controls, from Airbus A320/330/340 to future military transport aircraft. Microprocess. Microsyst. 1995, 19, 75–82. [Google Scholar] [CrossRef]
- Collinson, R. Fly-by-wire flight control. Comput. Control Eng. J. 1999, 10, 141–152. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, Y.; Wang, Z.; Tao, Y.; Yang, L.; Li, Y. Prediction of Oil Contamination in Aviation Hydraulic System and Active Leakage Strategy. In Proceedings of the 2022 IEEE 17th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 16–19 December 2022; pp. 578–583. [Google Scholar] [CrossRef]
- Ye, X.; Luo, B.; Deng, L. Semi-physical Simulation Model for Leakage of Prediction Aviation Pipeline. J. Phys. Conf. Ser. 2023, 2437, 012025. [Google Scholar] [CrossRef]
- Kosova, F.; Unver, H.O. A digital twin framework for aircraft hydraulic systems failure detection using machine learning techniques. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2023, 237, 1563–1580. [Google Scholar] [CrossRef]
- Shen, K.; Zhao, D. Fault analysis and fault degree evaluation via an improved ResNet method for aircraft hydraulic system. Sci. Rep. 2025, 15, 4132. [Google Scholar] [CrossRef]
- Liu, J.; Xu, Y.; Zhou, K.; Ge, M.F. 6—Fault diagnosis and failure prognosis in hydraulic systems. In Fault Diagnosis and Prognosis Techniques for Complex Engineering Systems; Karimi, H., Ed.; Academic Press: Cambridge, MA, USA, 2021; pp. 207–262. [Google Scholar] [CrossRef]
- Yang, Y.; Ding, L.; Xiao, J.; Fang, G.; Li, J. Current Status and Applications for Hydraulic Pump Fault Diagnosis: A Review. Sensors 2022, 22, 9714. [Google Scholar] [CrossRef]
- Zong, W.; Wan, F.; Wei, Y. Real-time monitoring for the actuator mechanism of the aileron. In Proceedings of the 2017 Prognostics and System Health Management Conference (PHM-Harbin), Harbin, China, 9–12 July 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Baraldi, P.; Cadini, F.; Mangili, F.; Zio, E. Model-based and Data-Driven prognostics under different available information. Probabilistic Eng. Mech. 2013, 32, 66–79. [Google Scholar] [CrossRef]
- Brotherton, T.; Jahns, G.; Jacobs, J.; Wroblewski, D. Prognosis of faults in gas turbine engines. In Proceedings of the 2000 IEEE Aerospace Conference, Big Sky, MT, USA, 18–25 March 2000; Volume 6, pp. 163–171. [Google Scholar] [CrossRef]
- Tidriri, K.; Chatti, N.; Verron, S.; Tiplica, T. Bridging Data-Driven and model-based approaches for process fault diagnosis and health monitoring: A review of researches and future challenges. Annu. Rev. Control 2016, 42, 63–81. [Google Scholar] [CrossRef]
- An, D.; Kim, N.H.; Choi, J.H. Practical options for selecting Data-Driven or physics-based prognostics algorithms with reviews. Reliab. Eng. Syst. Saf. 2015, 133, 223–236. [Google Scholar] [CrossRef]
- An, D.; Choi, J.H.; Kim, N.H. Options for Prognostics Methods: A review of Data-Driven and physics-based prognostics. In Proceedings of the 54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Boston, MA, USA, 8–11 April 2013; p. 1940. [Google Scholar] [CrossRef]
- Jieyang, P.; Kimmig, A.; Dongkun, W.; Niu, Z.; Zhi, F.; Jiahai, W.; Liu, X.; Ovtcharova, J. A systematic review of Data-Driven approaches to fault diagnosis and early warning. J. Intell. Manuf. 2023, 34, 3277–3304. [Google Scholar] [CrossRef]
- Ladj, A.; Tayeb, F.B.S.; Varnier, C. An integrated prognostic based hybrid genetic-immune algorithm for scheduling jobs and predictive maintenance. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; pp. 2083–2089. [Google Scholar] [CrossRef]
- Liao, L.; Köttig, F. Review of hybrid prognostics approaches for remaining useful life prediction of engineered systems, and an application to battery life prediction. IEEE Trans. Reliab. 2014, 63, 191–207. [Google Scholar] [CrossRef]
- Leturiondo, U.; Salgado, O.; Ciani, L.; Galar, D.; Catelani, M. Architecture for hybrid modelling and its application to diagnosis and prognosis with missing data. Measurement 2017, 108, 152–162. [Google Scholar] [CrossRef]
- Medjaher, K.; Zerhouni, N. Framework for a hybrid prognostics. Chem. Eng. Trans. 2013, 33, 91–96. [Google Scholar] [CrossRef]
- Li, H.; Zhang, Z.; Li, T.; Si, X. A review on physics-informed Data-Driven remaining useful life prediction: Challenges and opportunities. Mech. Syst. Signal Process. 2024, 209, 111120. [Google Scholar] [CrossRef]
- Deng, W.; Nguyen, K.T.; Medjaher, K.; Gogu, C.; Morio, J. Physics-informed machine learning in prognostics and health management: State of the art and challenges. Appl. Math. Model. 2023, 124, 325–352. [Google Scholar] [CrossRef]
- Fassi, Y.; Heiries, V.; Boutet, J.; Boisseau, S. Towards Physics-Informed Machine Learning-Based Predictive Maintenance for Power Converters—A Review. IEEE Trans. Power Electron. 2023, 39, 2692–2720. [Google Scholar] [CrossRef]
- Lai, C.; Baraldi, P.; Zio, E. Physics-Informed deep Autoencoder for fault detection in New-Design systems. Mech. Syst. Signal Process. 2024, 215, 111420. [Google Scholar] [CrossRef]
- Lai, C.; Baraldi, P.; Quattrocchi, G.; Dalla Vedova, M.D.L.; Baldo, L.; Bertone, M.; Zio, E. Detection of Abnormal Conditions in Electro-Mechanical Actuators by Physics-Informed Long Short-term Memory Networks. In Proceedings of the PHM Society European Conference, Prague, Czech Republic, 3–5 July 2024; Volume 8, p. 8. [Google Scholar] [CrossRef]
- Ma, Z.; Liao, H.; Gao, J.; Nie, S.; Geng, Y. Physics-informed machine learning for degradation modeling of an electro-hydrostatic actuator system. Reliab. Eng. Syst. Saf. 2023, 229, 108898. [Google Scholar] [CrossRef]
- Nascimento, R.G.; Corbetta, M.; Kulkarni, C.S.; Viana, F.A. Hybrid physics-informed neural networks for lithium-ion battery modeling and prognosis. J. Power Sources 2021, 513, 230526. [Google Scholar] [CrossRef]
- Yucesan, Y.A.; Viana, F.A. A hybrid physics-informed neural network for main bearing fatigue prognosis under grease quality variation. Mech. Syst. Signal Process. 2022, 171, 108875. [Google Scholar] [CrossRef]
- Carrera-Rivera, A.; Ochoa, W.; Larrinaga, F.; Lasa, G. How-to conduct a systematic literature review: A quick guide for computer science research. MethodsX 2022, 9, 101895. [Google Scholar] [CrossRef]
- Petersen, K.; Vakkalanka, S.; Kuzniarz, L. Guidelines for conducting systematic mapping studies in software engineering: An update. Inf. Softw. Technol. 2015, 64, 1–18. [Google Scholar] [CrossRef]
- Ma, Z.; Sun, Y.; Ji, H.; Li, S.; Nie, S.; Yin, F. A CNN-BiLSTM-Attention approach for EHA degradation prediction based on time-series generative adversarial network. Mech. Syst. Signal Process. 2024, 215, 111443. [Google Scholar] [CrossRef]
- Scott, M.J.; Verhagen, W.J.; Bieber, M.T.; Marzocca, P. A systematic literature review of predictive maintenance for defence fixed-wing aircraft sustainment and operations. Sensors 2022, 22, 7070. [Google Scholar] [CrossRef] [PubMed]
- Byington, C.S.; Watson, M.; Edwards, D. Dynamic Signal Analysis and Neural Network Modeling for Life Prediction of Flight Control Actuators. In Proceedings of the 60th Annual Forum of the American Helicopter Society, Baltimore, MD, USA, 7–10 June 2004; pp. 1580–1589. [Google Scholar]
- Byington, C.S.; Watson, M.; Edwards, D. Data-Driven neural network methodology to remaining life predictions for aircraft actuator components. In Proceedings of the 2004 IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 6–13 March 2004; Volume 6, pp. 3581–3589. [Google Scholar] [CrossRef]
- de Oliveira Bizarria, C.; Yoneyama, T. Prognostics and Health Monitoring for an electro-hydraulic flight control actuator. In Proceedings of the 2009 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2009; pp. 1–9. [Google Scholar] [CrossRef]
- Borello, L.; Dalla Vedova, M.D.L.; Jacazio, G.; Sorli, M. A prognostic model for electrohydraulic servovalves. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, San Diego, CA, USA, 28–30 September 2009; Volume 1, p. 127. [Google Scholar]
- Bartram, G.; Mahadevan, S. Dynamic Bayesian networks for prognosis. In Proceedings of the Annual Conference of the PHM Society, New Orleans, LA, USA, 14–17 October 2013; Volume 5, p. 2246. [Google Scholar] [CrossRef]
- Zhang, K.; Yao, J.; Jiang, T. Degradation assessment and life prediction of electro-hydraulic servo valve under erosion wear. Eng. Fail. Anal. 2014, 36, 284–300. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, J.; Lu, C. Performance degradation prediction for a hydraulic servo system based on Elman network observer and GMM–SVR. Appl. Math. Model. 2015, 39, 5882–5895. [Google Scholar] [CrossRef]
- Bartram, G.; Mahadevan, S. Probabilistic prognosis with dynamic bayesian networks. Int. J. Progn. Health Manag. 2015, 6, 4. [Google Scholar] [CrossRef]
- Mornacchi, A.; Vachtsevanos, G.; Jacazio, G. Prognostics and Health Management of an Electro-Hydraulic Servo Actuator. In Proceedings of the Annual Conference of the PHM Society, Coronado, CA, USA, 18–24 October 2015; Volume 7, p. 2769. [Google Scholar] [CrossRef]
- Zhenya, W.; Lu, C.; Ma, J.; Yuan, H.; Chen, Z. Novel method for performance degradation assessment and prediction of hydraulic servo system. Sci. Iran. 2015, 22, 1604–1615. [Google Scholar]
- Soudbakhsh, D.; Annaswamy, A.M. Prognostics and Health Monitoring of Electro-Hydraulic Systems. In Proceedings of the ASME 2017 Dynamic Systems and Control Conference. Volume 2: Mechatronics; Estimation and Identification; Uncertain Systems and Robustness; Path Planning and Motion Control; Tracking Control Systems; Multi-Agent and Networked Systems; Manufacturing; Intelligent Transportation and Vehicles; Sensors and Actuators; Diagnostics and Detection; Unmanned, Ground and Surface Robotics; Motion and Vibration Control Applications, Tysons, VA, USA, 11–13 October 2017; Volume 58288, p. V002T19A005. [Google Scholar] [CrossRef]
- Guo, R.; Gan, Q. Prognostics for a Leaking Hydraulic Actuator Based on the F-Distribution Particle Filter. IEEE Access 2017, 5, 22409–22420. [Google Scholar] [CrossRef]
- Macaluso, A.; Jacazio, G. Prognostic and Health Management System for Fly-by-wire Electro-hydraulic Servo Actuators for Detection and Tracking of Actuator Faults. In Proceedings of the 5th International Conference in Through-Life Engineering Services Cranfield University 2016, Cranfield University, UK, 1–2 November 2017; Volume 59, pp. 116–121. [Google Scholar] [CrossRef]
- Lu, C.; Yuan, H.; Ma, J. Fault detection, diagnosis, and performance assessment scheme for multiple redundancy aileron actuator. Mech. Syst. Signal Process. 2018, 113, 199–221. [Google Scholar] [CrossRef]
- Autin, S.; Socheleau, J.; Dellacasa, A.; De Martin, A.; Jacazio, G.; Vachtsevanos, G. Feasibility Study of a PHM System for Electro-hydraulic Servo-actuators for Primary Flight Controls. In Proceedings of the Annual Conference of the PHM Society, Philadelphia, PA, USA, 24–27 September 2018; Volume 10, p. 511. [Google Scholar] [CrossRef]
- Shahkar, S.; Shen, Y.; Khorasani, K. Diagnosis, Prognosis and Health Monitoring of Electro Hydraulic Servo Valves (EHSV) using Particle Filters. In Proceedings of the 2019 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019; pp. 385–390. [Google Scholar] [CrossRef]
- Guo, R.; Sui, J. Prognostics for an actuator based on an ensemble of support vector regression and particle filter. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2019, 233, 642–655. [Google Scholar] [CrossRef]
- Guo, R.; Sui, J. Remaining Useful Life Prognostics for the Electrohydraulic Servo Actuator Using Hellinger Distance-Based Particle Filter. IEEE Trans. Instrum. Meas. 2020, 69, 1148–1158. [Google Scholar] [CrossRef]
- Kordestani, M.; Samadi, M.F.; Saif, M. A New Hybrid Fault Prognosis Method for MFS Systems Based on Distributed Neural Networks and Recursive Bayesian Algorithm. IEEE Syst. J. 2020, 14, 5407–5416. [Google Scholar] [CrossRef]
- Guo, R.; Liu, Z.; Wang, J. Remaining useful life prediction for the electro-hydraulic actuator based on improved relevance vector machine. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2020, 234, 501–511. [Google Scholar] [CrossRef]
- Nesci, A.; De Martin, A.; Jacazio, G.; Sorli, M. Detection and Prognosis of Propagating Faults in Flight Control Actuators for Helicopters. Aerospace 2020, 7, 20. [Google Scholar] [CrossRef]
- De Martin, A.; Jacazio, G.; Sorli, M. Preliminary study towards the definition of a PHM framework for the hydraulic system of a fly-by-wire helicopter. In Proceedings of the Annual Conference of the PHM Society, Online, 26–30 October 2020; Volume 12, p. 1290. [Google Scholar] [CrossRef]
- Autin, S.; De Martin, A.; Jacazio, G.; Socheleau, J.; Vachtsevanos, G. Results of a Feasibility Study of a Prognostic System for Electro-Hydraulic Flight Control Actuators. Int. J. Progn. Health Manag. 2021, 12, 3. [Google Scholar] [CrossRef]
- Bertolino, A.C.; De Martin, A.; Jacazio, G.; Sorli, M. A Case Study on the Detection and Prognosis of Internal Leakages in Electro-Hydraulic Flight Control Actuators. Actuators 2021, 10, 215. [Google Scholar] [CrossRef]
- De Martin, A.; Jacazio, G.; Sorli, M. Performance Evaluation of Different PHM Strategies on the Performances of a Prognostic Framework for Electro-Hydraulic Actuators for Stability Control Augmentation Systems. In Proceedings of the Annual Conference of the PHM Society, Nashville, TN, USA, 31 October–4 November 2022; Volume 14, p. 3289. [Google Scholar] [CrossRef]
- Shahkar, S.; Khorasani, K. A Multidimensional Bayesian Methodology for Diagnosis, Prognosis, and Health Monitoring of Electrohydraulic Servo Valves. IEEE Trans. Control Syst. Technol. 2022, 30, 931–943. [Google Scholar] [CrossRef]
- Cui, Z.; Jing, B.; Jiao, X.; Huang, Y.; Wang, S. The Integrated-Servo-Actuator Degradation Prognosis Based on the Physical Model Combined with Data-Driven Approach. IEEE Sens. J. 2023, 23, 9370–9381. [Google Scholar] [CrossRef]
- Mi, J.; Huang, G. Dynamic Prediction of Performance Degradation Characteristics of Direct-Drive Electro-Hydraulic Servo Valves. Appl. Sci. 2023, 13, 7231. [Google Scholar] [CrossRef]
- Iyaghigba, S.D.; Ali, F.; Jennions, I.K. A Review of Diagnostic Methods for Hydraulically Powered Flight Control Actuation Systems. Machines 2023, 11, 165. [Google Scholar] [CrossRef]
- Wheeler, P.; Bozhko, S. The More Electric Aircraft: Technology and challenges. IEEE Electrif. Mag. 2014, 2, 6–12. [Google Scholar] [CrossRef]
- Maré, J.C. Review and Analysis of the Reasons Delaying the Entry into Service of Power-by-Wire Actuators for High-Power Safety-Critical Applications. Actuators 2021, 10, 233. [Google Scholar] [CrossRef]
- Leao, B.P.; Fitzgibbon, K.T.; Puttini, L.C.; De Melo, G.P.B. Cost-Benefit Analysis Methodology for PHM Applied to Legacy Commercial Aircraft. In Proceedings of the 2008 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008; pp. 1–13. [Google Scholar] [CrossRef]
- Rodrigues, L.R.; Yoneyama, T.; Nascimento, C.L. How aircraft operators can benefit from PHM techniques. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Vachtsevanos, G. Intelligent Fault Diagnosis and Prognosis for Engineering Systems; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2006; Chapter 6; pp. 284–354. [Google Scholar] [CrossRef]
- Wang, Y.; Xiang, J.; Markert, R.; Liang, M. Spectral kurtosis for fault detection, diagnosis and prognostics of rotating machines: A review with applications. Mech. Syst. Signal Process. 2016, 66–67, 679–698. [Google Scholar] [CrossRef]
- Bertolino, A.C.; Gentile, R.; Jacazio, G.; Marino, F.; Sorli, M. EHSA Primary Flight Controls Seals Wear Degradation Model. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Pittsburgh, PA, USA, 9–15 November 2018; Volume 1, p. V001T03A024. [Google Scholar] [CrossRef]
- Adams, S.; Meekins, R.; Beling, P.A.; Farinholt, K.; Brown, N.; Polter, S.; Dong, Q. A Comparison of Feature Selection and Feature Extraction Techniques for Condition Monitoring of a Hydraulic Actuator. In Proceedings of the Annual Conference of the PHM Society, St. Petersburg, FL, USA, 2–5 October 2017; Volume 9, p. 2452. [Google Scholar] [CrossRef]
- Cusati, V.; Corcione, S.; Memmolo, V. Impact of Structural Health Monitoring on Aircraft Operating Costs by Multidisciplinary Analysis. Sensors 2021, 21, 6938. [Google Scholar] [CrossRef]
- Dalla Vedova, M.D.L.; Cerqua, G.; Maggiore, P. Prognostics of onboard electrohydraulic servomechanisms: Proposal of a novel model-based fault detection neural technique. In Proceedings of the 2017 2nd International Conference on System Reliability and Safety (ICSRS), Milan, Italy, 20–22 December 2017; pp. 99–106. [Google Scholar] [CrossRef]
- Kannemans, H.; Jentink, H.W. A Method to Derive the Usage of Hydraulic Actuators From Flight Data. In Proceedings of the ICAS 2002 CONGRESS, Toronto, ON, Canada, 8–13 September 2002. [Google Scholar]
- Zhou, X.; Dziendzikowski, M.; Dragan, K.; Dong, L.; Giglio, M.; Sbarufatti, C. Generating High-Resolution Flight Parameters in Structural Digital Twins Using Deep Learning-based Upsampling. In Proceedings of the 2023 Prognostics and Health Management Conference (PHM), Paris, France, 31 May–2 June 2023; pp. 318–323. [Google Scholar] [CrossRef]
- Arulampalam, M.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Li, T. Particle filter-based fatigue damage prognosis using prognostic-aided model updating. Mech. Syst. Signal Process. 2024, 211, 111244. [Google Scholar] [CrossRef]
- Jouin, M.; Gouriveau, R.; Hissel, D.; Péra, M.C.; Zerhouni, N. Particle filter-based prognostics: Review, discussion and perspectives. Mech. Syst. Signal Process. 2016, 72–73, 2–31. [Google Scholar] [CrossRef]
- Wang, W.; Gao, Z. A comparison study of advanced state observer design techniques. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 6, pp. 4754–4759. [Google Scholar] [CrossRef]
- Mo, R.; Zhou, H.; Yin, H.; Si, X. A survey on few-shot learning for remaining useful life prediction. Reliab. Eng. Syst. Saf. 2025, 257, 110850. [Google Scholar] [CrossRef]
- Dou, S.; Li, F.; Chang, Y.; Chen, J.; Zheng, W.; Li, A. Few-shot fault identification of complex equipment via metric-based features capture GAN combining prior knowledge-augmented strategy. J. Manuf. Syst. 2023, 71, 238–256. [Google Scholar] [CrossRef]
- Li, Q.; Tang, Y.; Chu, L. Generative adversarial networks for prognostic and health management of industrial systems: A review. Expert Syst. Appl. 2024, 253, 124341. [Google Scholar] [CrossRef]
- Fox, C.; Levitin, A.; Redman, T. The notion of data and its quality dimensions. Inf. Process. Manag. 1994, 30, 9–19. [Google Scholar] [CrossRef]
- Jia, X.; Ji, D.Y.; Minami, T.; Lee, J. Data Quality and Usability Assessment Methodology for Prognostics and Health Management: A Systematic Framework. IFAC-PapersOnLine 2022, 55, 55–60. [Google Scholar] [CrossRef]
- Lukens, S.; Rousis, D.; Baer, T.; Lujan, M.; Smith, M. A Data Quality Scorecard for Assessing the Suitability of Asset Condition Data for Prognostics Modeling. In Proceedings of the Annual Conference of the PHM Society, Nashville, TN, USA, 31 October–4 November 2022; Volume 14, p. 3188. [Google Scholar] [CrossRef]
- Omri, N.; Al Masry, Z.; Mairot, N.; Giampiccolo, S.; Zerhouni, N. Towards an adapted PHM approach: Data quality requirements methodology for fault detection applications. Comput. Ind. 2021, 127, 103414. [Google Scholar] [CrossRef]
- Sidi, F.; Shariat Panahy, P.H.; Affendey, L.S.; Jabar, M.A.; Ibrahim, H.; Mustapha, A. Data quality: A survey of data quality dimensions. In Proceedings of the 2012 International Conference on Information Retrieval & Knowledge Management, Kuala Lumpur, Malaysia, 13–15 March 2012; pp. 300–304. [Google Scholar] [CrossRef]
- Rosero, R.H.L.; Silva, C.; Ribeiro, B. Remaining useful life estimation in aircraft components with federated learning. In Proceedings of the PHM Society European Conference, Online, 1–3 July 2020; Volume 5, p. 9. [Google Scholar] [CrossRef]
- Goebel, K.; Saxena, A.; Saha, S.; Saha, B.; Celaya, J. Prognostic Performance Metrics. Mach. Learn. Knowl. Discov. Eng. Syst. Health Manag. 2011, 22, 147. [Google Scholar] [CrossRef]
- Ochella, S.; Shafiee, M. Performance Metrics for Artificial Intelligence (AI) Algorithms Adopted in Prognostics and Health Management (PHM) of Mechanical Systems. J. Phys. Conf. Ser. 2021, 1828, 012005. [Google Scholar] [CrossRef]
- Saxena, A.; Celaya, J.; Balaban, E.; Goebel, K.; Saha, B.; Saha, S.; Schwabacher, M. Metrics for evaluating performance of prognostic techniques. In Proceedings of the 2008 International Conference on Prognostics and Health Management, Denver, CO, USA, 6–9 October 2008; pp. 1–17. [Google Scholar] [CrossRef]
- Saxena, A.; Celaya, J.; Saha, B.; Saha, S.; Goebel, K. On Applying the Prognostic Performance Metrics. In Proceedings of the Annual Conference of the PHM Society, San Diego, CA, USA, 27 September–1 October 2009; Volume 1, p. 1. [Google Scholar] [CrossRef]
- Uckun, S.; Goebel, K.; Lucas, P.J. Standardizing research methods for prognostics. In Proceedings of the 2008 International Conference on Prognostics and Health Management, Denver, CO, USA, 6–9 October 2008; pp. 1–10. [Google Scholar] [CrossRef]
- Vogl, G.W.; Weiss, B.A.; Donmez, M.A. Standards Related to Prognostics and Health Management (PHM) for Manufacturing; Technical Report NIST IR 8012; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2014. [Google Scholar] [CrossRef]
- Esperon-Miguez, M.; Jennions, I.K.; John, P. Implementing IVHM on Legacy Aircraft: Progress Towards Identifying an Optimal Combination of Technologies. In Proceedings of the Engineering Asset Management-Systems, Professional Practices and Certification: Proceedings of the 8th World Congress on Engineering Asset Management (WCEAM 2013) & the 3rd International Conference on Utility Management & Safety (ICUMAS), Hong Kong, China, 30 October–1 November 2015; pp. 799–812. [Google Scholar]
- Feldman, K.; Jazouli, T.; Sandborn, P.A. A Methodology for Determining the Return on Investment Associated With Prognostics and Health Management. IEEE Trans. Reliab. 2009, 58, 305–316. [Google Scholar] [CrossRef]
- Compare, M.; Antonello, F.; Pinciroli, L.; Zio, E. A general model for life-cycle cost analysis of Condition-Based Maintenance enabled by PHM capabilities. Reliab. Eng. Syst. Saf. 2022, 224, 108499. [Google Scholar] [CrossRef]
- Hulse, D.; Hoyle, C.; Goebel, K.; Tumer, I. Using Value Assessment to Drive PHM System Development in Early Design. In Proceedings of the Annual Conference of the PHM Society, Scottsdale, AZ, USA, 23–26 September 2019; Volume 11, p. 779. [Google Scholar] [CrossRef]

| Authors | Year | Ref. No. |
|---|---|---|
| Byington et al. | 2004 | [64] |
| Byington et al. | 2004 | [65] |
| De Oliveira Bizzarria and Yoneyama | 2009 | [66] |
| Borello et al. | 2009 | [67] |
| Bartram abd Mahadevan | 2013 | [68] |
| Zhang et al. | 2014 | [69] |
| Liu et al. | 2015 | [70] |
| Bartram and Mahadevan | 2015 | [71] |
| Mornacchi et al. | 2015 | [72] |
| Zhenya et al. | 2015 | [73] |
| Soudbakhsh and Annaswamy | 2017 | [74] |
| Guo and Gan | 2017 | [75] |
| Macaluso and Jacazio | 2017 | [76] |
| Lu et al. | 2018 | [77] |
| Autin et al. | 2018 | [78] |
| Shahkar et al. | 2019 | [79] |
| Guo and Sui | 2019 | [80] |
| Guo and Sui | 2020 | [81] |
| Kordestani et al. | 2020 | [82] |
| Guo et al. | 2020 | [83] |
| Nesci et al. | 2020 | [84] |
| De Martin et al. | 2020 | [85] |
| Autin et al. | 2021 | [86] |
| Bertolino et al. | 2021 | [87] |
| De Martin et al. | 2022 | [88] |
| Shahkar and Khorasani | 2022 | [89] |
| Cui et al. | 2023 | [90] |
| Mi and Huang | 2023 | [91] |
| Ref. No. | Diagnosis |
|---|---|
| [64] | Fuzzy logic classifier on three features, FFT on hydraulic pressure, Electric current Signature Analysis (ESA) on the servo valve current, and a feed-forward neural network |
| [65] | Fuzzy logic classifier on three features: FFT on hydraulic pressure, Electric current Signature Analysis (ESA) on the servo valve current, and a feed-forward neural network |
| [66] | Residue approach on feature integral with threshold chosen via frequency responses |
| [67] | Custom mathematical functions applied on signals and thresholds |
| [68] | System model based on Dynamic Bayesian Network, Particle Filter |
| [69] | - |
| [70] | Elman neural network observer, Gaussian Mixture Model (GMM) |
| [71] | System model based on Dynamic Bayesian Network, Particle Filter |
| [72] | Data-Driven distribution comparison |
| [73] | Mahalanobis distance applied on features obtained through a Mean Impact Value guided optimization on Radial Basis Function (RBF) neural network state observer obtained error |
| [74] | Two-step identification, Matrix Regressor Adaptive Observers (MRAO) |
| [75] | - |
| [76] | Data-Drive distribution comparison |
| [77] | Two-step RBF neural network (observer and error computing) |
| [78] | Data-Driven distribution comparison; Non linear symbolic regression |
| [79] | Data distribution comparison, Modeled features |
| [80] | - |
| [81] | - |
| [82] | Three distributed Multi-Layer Perceptrons (MLPs) |
| [83] | - |
| [84] | Data-Driven distribution comparison |
| [85] | Data-Driven distribution comparison |
| [86] | Data-Driven distribution comparison |
| [87] | Data-Driven distribution comparison, Linear SVM |
| [88] | Data-Driven distribution comparison, Linear SVM |
| [89] | Multidimensional Bayesian methodology |
| [90] | - |
| [91] | - |
| Ref. No. | Performance Assessment/Prognosis |
|---|---|
| [64] | Feature-based state space tracking routine (Kalman filter) with Newtonian relationship |
| [65] | Feature-based state space tracking routine (Kalman filter) with Newtonian relationship |
| [66] | RUL linear interpolation |
| [67] | Threshold-based system on the absolute position error: Least square interpolating function or linear projection depending on the fault level |
| [68] | System model based on Dynamic Bayesian Network and Sequential or Recursive Monte Carlo (Particle Filter) |
| [69] | Physics of Failure (PoF), mathematical models for wear |
| [70] | Support Vector Regression (SVR) |
| [71] | System model based on Dynamic Bayesian Network and Sequential or Recursive Monte Carlo (Particle Filter) |
| [72] | Particle Filter, High-fidelity model |
| [73] | Elman neural network |
| [74] | Graph extrapolation on a feature map graph |
| [75] | F-Distribution Particle Filter |
| [76] | Particle Filter, High-fidelity model |
| [77] | Self Organizing Maps (SOM) |
| [78] | Particle Filter, High-fidelity model |
| [79] | Particle Filter |
| [80] | Support Vector Regression (SVR) and Particle Filter based on Kendall correlation coefficient |
| [81] | Minimum Hellinger Distance on a Particle Filtering (PF) algorithm |
| [82] | Recursive Bayesian algorithm |
| [83] | Improved relevance vector machine |
| [84] | Particle Filter, High-fidelity model |
| [85] | Particle Filter, High-fidelity model |
| [86] | Particle Filter, High-fidelity model |
| [87] | Particle Filter, High-fidelity model |
| [88] | Particle Filter, High-fidelity model |
| [89] | Bayesian multidimensional space methodology |
| [90] | Nonlinear Wiener Process (NWP) and Wavelet Packet Decomposition Echo-State-Network (WPD-ESN) |
| [91] | Exponential Smoothing, ARIMA, and fusion prediction |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baldo, L.; De Martin, A.; Jacazio, G.; Sorli, M. A Systematic Literature Review on PHM Strategies for (Hydraulic) Primary Flight Control Actuation Systems. Actuators 2025, 14, 382. https://doi.org/10.3390/act14080382
Baldo L, De Martin A, Jacazio G, Sorli M. A Systematic Literature Review on PHM Strategies for (Hydraulic) Primary Flight Control Actuation Systems. Actuators. 2025; 14(8):382. https://doi.org/10.3390/act14080382
Chicago/Turabian StyleBaldo, Leonardo, Andrea De Martin, Giovanni Jacazio, and Massimo Sorli. 2025. "A Systematic Literature Review on PHM Strategies for (Hydraulic) Primary Flight Control Actuation Systems" Actuators 14, no. 8: 382. https://doi.org/10.3390/act14080382
APA StyleBaldo, L., De Martin, A., Jacazio, G., & Sorli, M. (2025). A Systematic Literature Review on PHM Strategies for (Hydraulic) Primary Flight Control Actuation Systems. Actuators, 14(8), 382. https://doi.org/10.3390/act14080382