
A Servo Control Algorithm Based on an Explicit Model Predictive Control and Extended State Observer with a Differential Compensator


Abstract
1. Introduction
- The application of EMPC to PMSLM-based positioning servo systems: By utilizing position and velocity as state variables, the adverse effects of integral terms on dynamic performance are avoided, resulting in a higher closed-loop bandwidth.
- The introduction of an MPC-based velocity feedforward term: By incorporating an MPC-based velocity feedforward term within the MPC structure, tracking accuracy for ramp signals is enhanced.
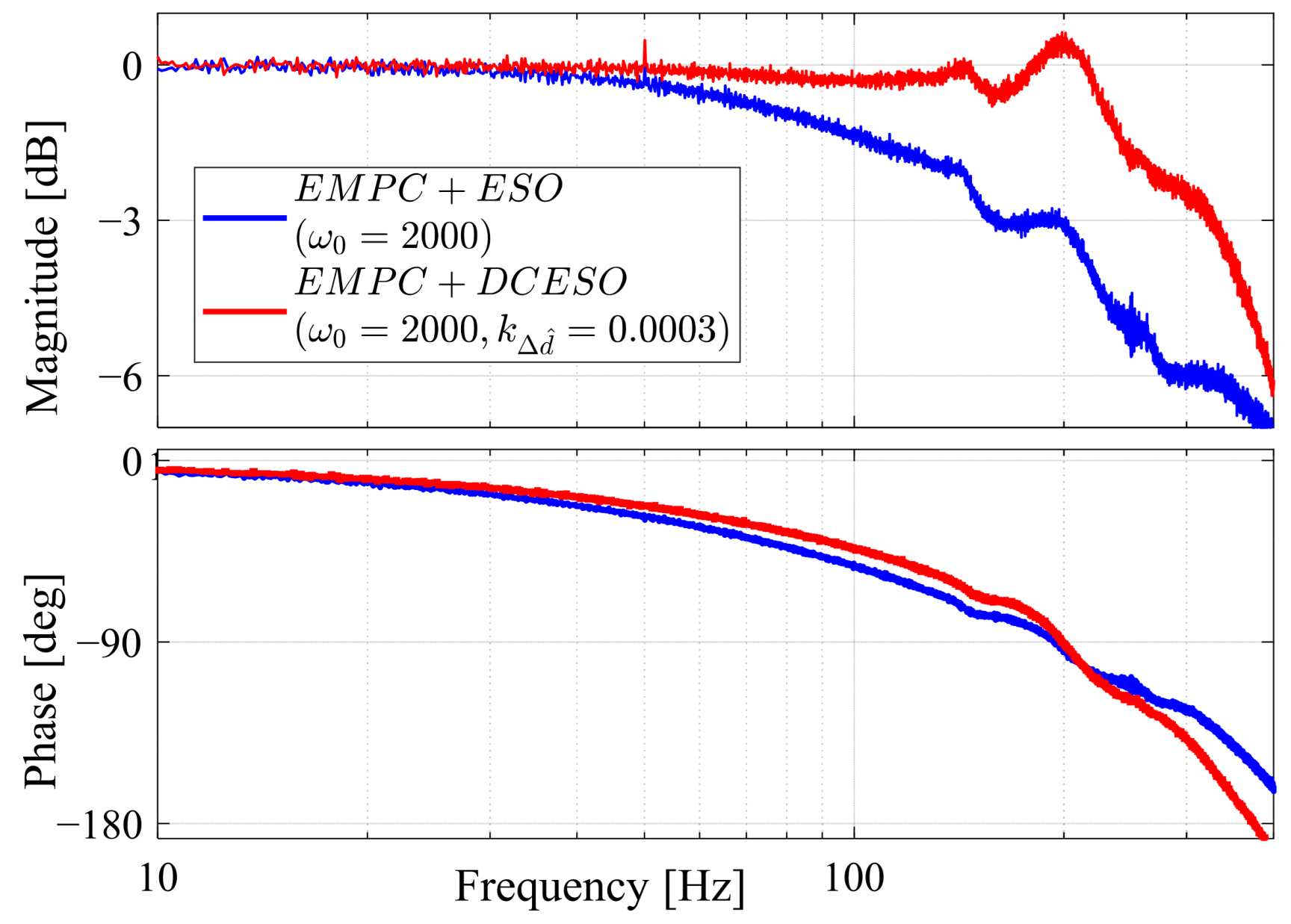
- The enhancement of ESO with a differential compensator (DCESO): The proposed DCESO incorporates a disturbance increment term to mitigate the inherent low-pass filtering limitations of traditional ESOs, thereby increasing the bandwidth of disturbance estimation and improving servo stiffness.
- The development of a 2-DOF control architecture (EMPC + DCESO): This integrated approach decouples tracking performance and disturbance rejection, enabling straightforward parameter tuning and low online computational consumption. Its modular design makes it ideal for deployment in embedded systems and industrial environments.
2. Explicit Model Predictive Control
2.1. State Model of a Linear Motor
2.2. Derivation of MPC with Constraints
2.3. Explicating MPC with Constraints
2.4. Derivation of Velocity Feedforward Controller
3. Extended State Observer with Differential Compensator
3.1. The Principle of ESO
3.2. Design of DCESO
4. Experimental Verification
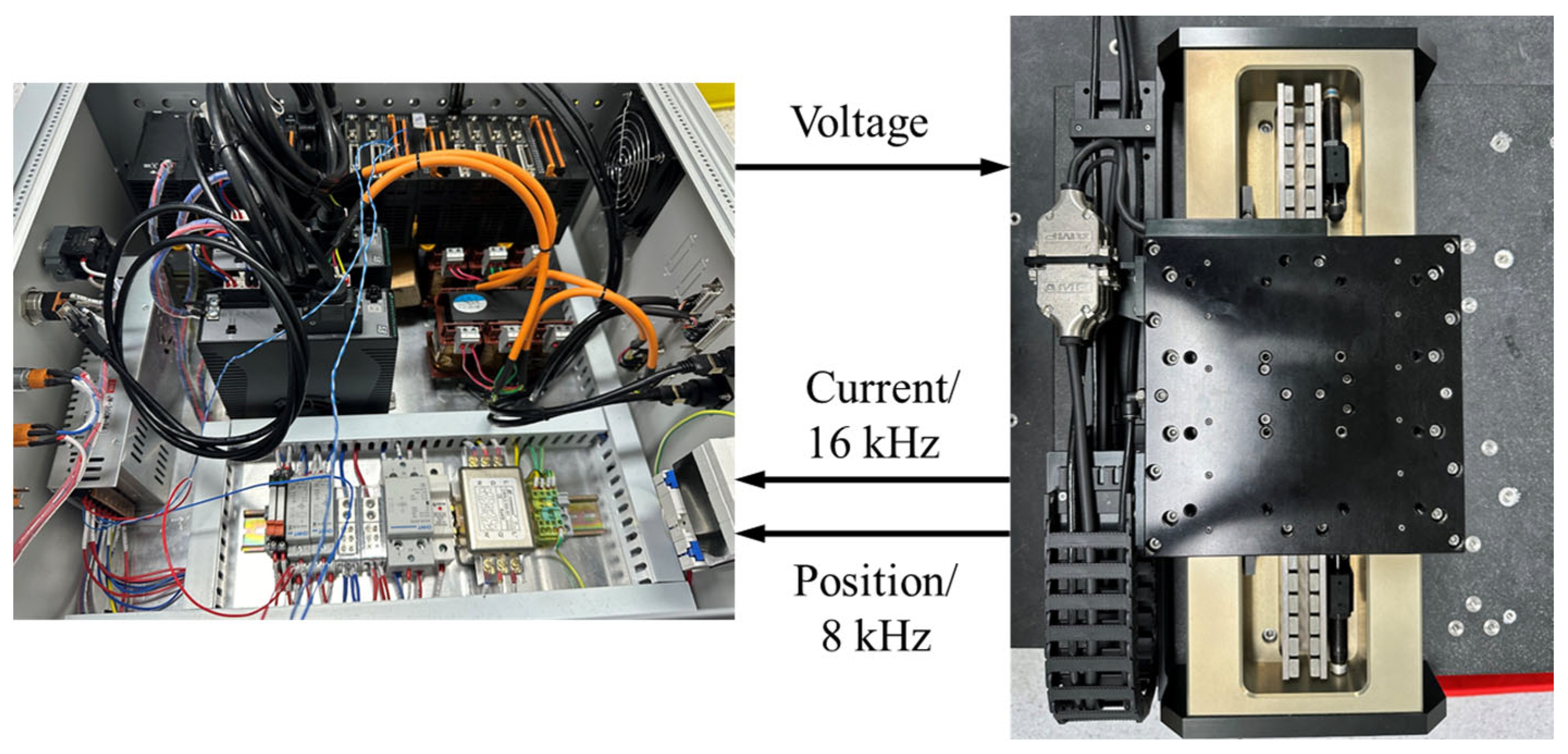
4.1. Setup of Test Bench
- Tune the position and velocity weights in the EMPC () to achieve the maximal position loop bandwidth with an open-loop magnitude reserve of −10 dB.
- Increase the velocity feedforward coefficient in the EMPC until the steady-state tracking error for the ramp signal is 0.
- Tune the poles of ESO and gradually increase the weights of the DCESO to enhance its anti-disturbance performance.
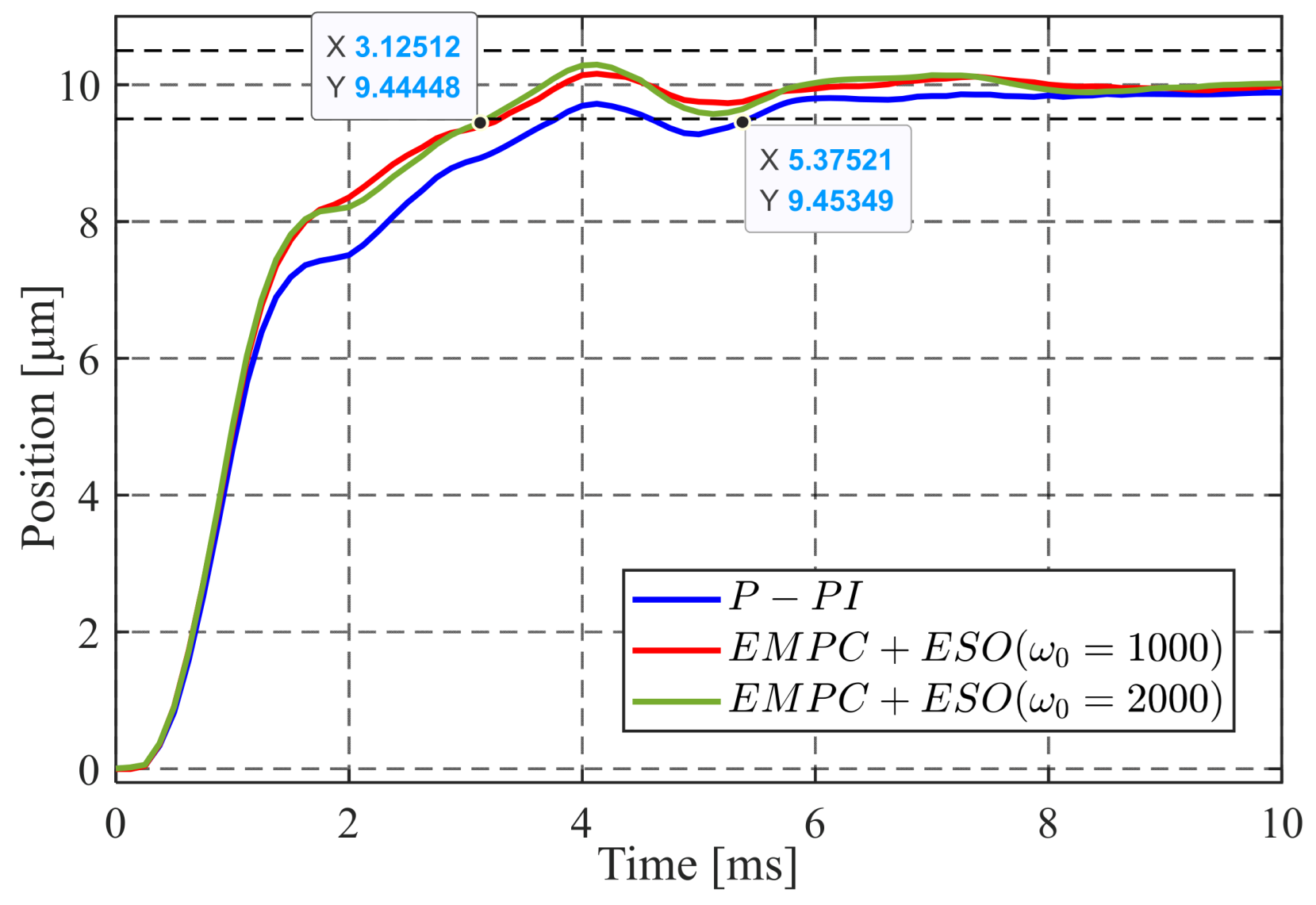
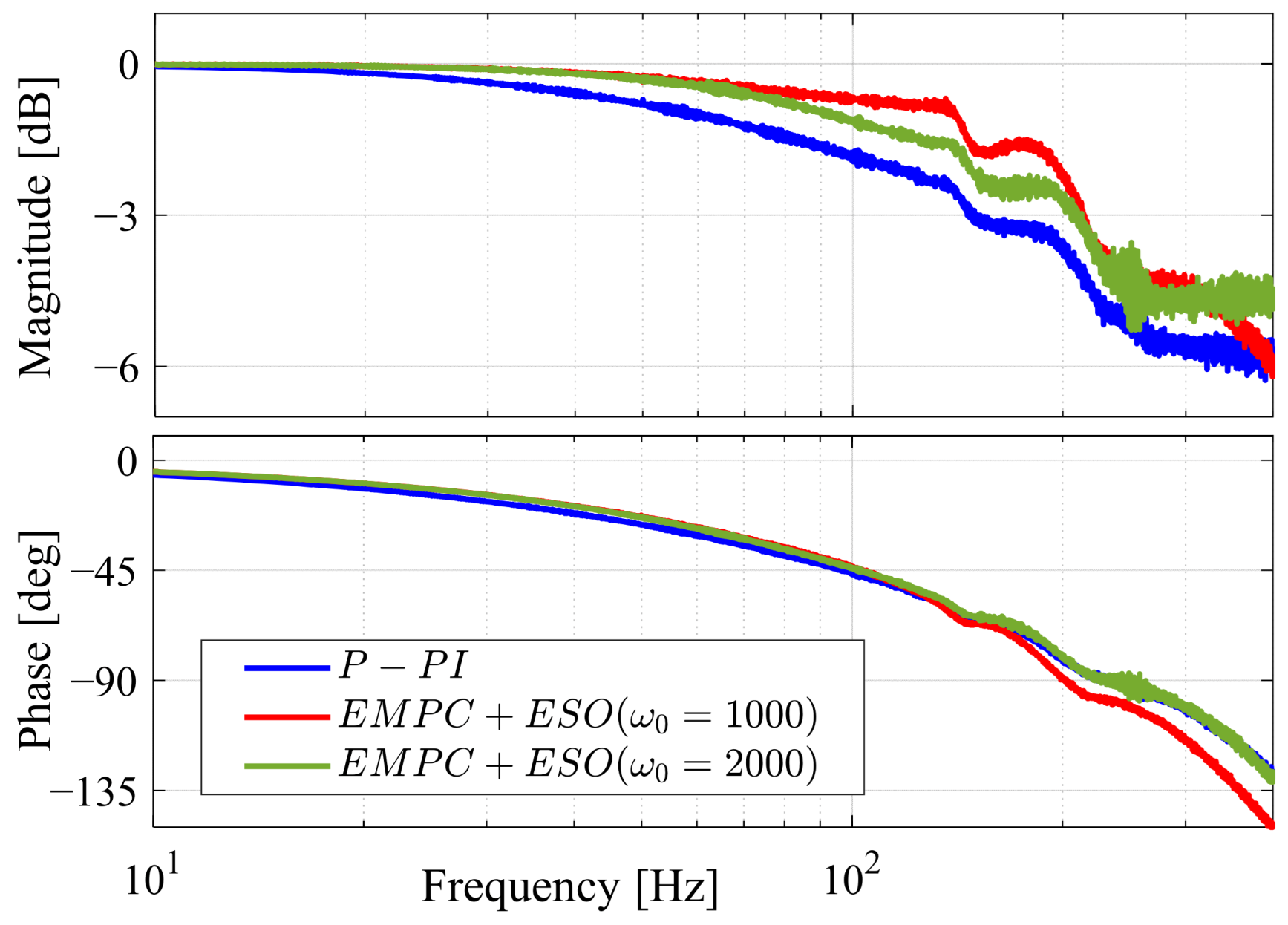
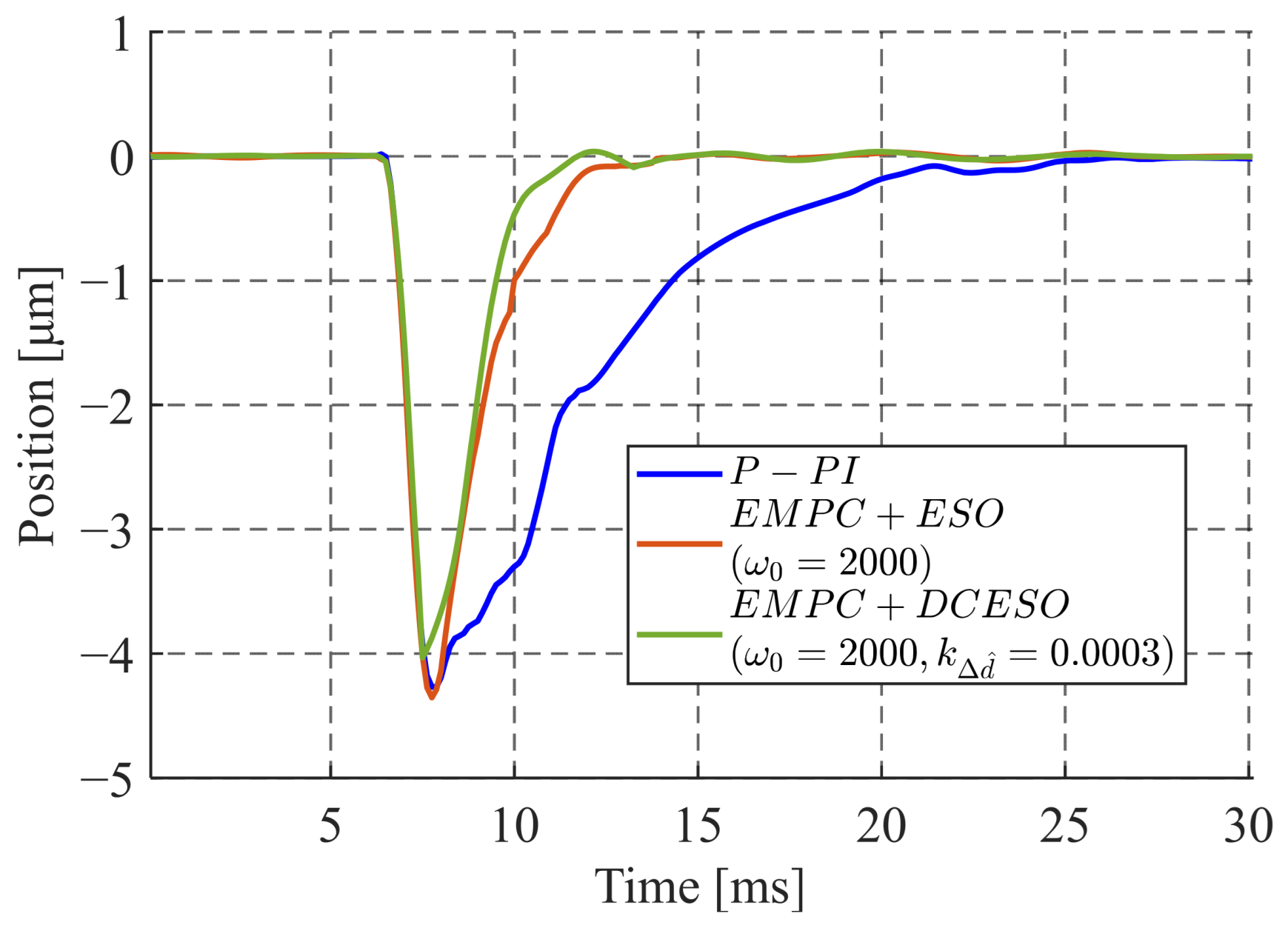
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yoon, J.Y.; Lang, J.H.; Trumper, D.L. Double-Sided Linear Iron-Core Fine-Tooth Motor for Low Acoustic Noise and High Acceleration. IEEE/ASME Trans. Mechatron. 2019, 24, 2161–2170. [Google Scholar] [CrossRef]
- Yuan, M.; Manzie, C.; Good, M.; Shames, I.; Gan, L.; Keynejad, F.; Robinette, T. A review of industrial tracking control algorithms. Control Eng. Pract. 2020, 102, 104536. [Google Scholar] [CrossRef]
- Lin, P.; Wu, Z.; Fei, Z.Y.; Sun, X.M. A Generalized PID Interpretation for High-Order LADRC and Cascade LADRC for Servo Systems. IEEE Trans. Ind. Electron. 2022, 69, 5207–5214. [Google Scholar] [CrossRef]
- Fu, D.X.; Zhao, X.M.; Zhu, J.G. Robust Tracking Control for Permanent Magnet Linear Synchronous Motors With Unknown Uncertainties via Sliding Mode Approach. Int. J. Control Autom. Syst. 2024, 22, 503–516. [Google Scholar]
- Xu, D.Z.; Ding, B.; Jiang, B.; Yang, W.L.; Shi, P. Nonsingular Fast Terminal Sliding Mode Control for Permanent Magnet Linear Synchronous Motor via High-Order Super-Twisting Observer. IEEE/ASME Trans. Mechatron. 2022, 27, 1651–1659. [Google Scholar] [CrossRef]
- Zhao, X.Y.; Wang, L.M. Bounded control of PMLSM servo system based on fractional order barrier function adaptive super-twisting approach. Control Eng. Pract. 2025, 154, 106131. [Google Scholar] [CrossRef]
- Zhu, Z.C.; Zhao, H.; Sun, H.; Shao, K. Diffeomorphism-Based Robust Bounded Control for Permanent Magnet Linear Synchronous Motor with Bounded Input and Position Constraints. IEEE Trans. Ind. Inform. 2023, 19, 5387–5399. [Google Scholar] [CrossRef]
- Wang, M.Y.; Kang, K.; Zhang, C.M.; Li, L.Y. Precise Position Control in Air-bearing PMLSM System Using an Improved Anticipatory Fractional-Order Iterative Learning Control. IEEE Trans. Ind. Electron. 2024, 71, 6073–6083. [Google Scholar] [CrossRef]
- Garcia, C.E.; Prett, D.M.; Morari, M. Model Predictive Control—Theory and Practice—A Survey. Automatica 1989, 25, 335–348. [Google Scholar]
- Rodriguez, J.; Garcia, C.; Mora, A.; Davari, S.A.; Rodas, J.; Valencia, D.F.; Elmorshedy, M.; Wang, F.X.; Zuo, K.K.; Tarisciotti, L.; et al. Latest Advances of Model Predictive Control in Electrical Drives-Part II: Applications and Benchmarking With Classical Control Methods. IEEE Trans. Power Electron. 2022, 37, 5047–5061. [Google Scholar] [CrossRef]
- Jiang, X.; Yang, Y.; Fan, M.D.; Ji, A.M.; Xiao, Y.; Zhang, X.A.; Zhang, W.; Garcia, C.; Vazquez, S.; Rodriguez, J. An Improved Implicit Model Predictive Current Control with Continuous Control Set for PMSM Drives. IEEE Trans. Transp. Electrif. 2022, 8, 2444–2455. [Google Scholar] [CrossRef]
- Xu, Y.X.; Li, S.B.; Zhang, W.T.; Yu, G.D.; Zou, J.B. Long-Horizon Constrained Model Predictive Direct Speed Control for PMSM Drives Based on Laguerre Functions. IEEE Trans. Control Syst. Technol. 2024, 32, 1002–1014. [Google Scholar] [CrossRef]
- He, C.; Hu, J.H.; Li, Y. Predictive Position Control with System Constraints for PMSM Drives Based on Geometric Optimization. IEEE Trans. Ind. Electron. 2023, 70, 7773–7782. [Google Scholar] [CrossRef]
- Bemporad, A.; Morari, M.; Dua, V.; Pistikopoulos, E.N. The explicit linear quadratic regulator for constrained systems. Automatica 2002, 38, 3–20. [Google Scholar] [CrossRef]
- Grieder, P.; Kvasnica, M.; Baotic, M.; Morari, M. Low complexity control of piecewise affine systems with stability guarantee. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; pp. 1196–1201. [Google Scholar]
- Lin, S.Y.; Zhao, M.Y.; Cao, Y.F.; Lin, Z.C.; Shi, T.N.; Xia, C.L. Active Disturbance Rejection Explicit Model Predictive Direct Speed Control for Permanent Magnet Synchronous Motors. In Proceedings of the 25th International Conference on Electrical Machines and Systems (ICEMS), Chiang Mai, Thailand, 29 November–2 December 2022; pp. 1–6. [Google Scholar]
- Guo, Q.; Pan, T.H. Constrained Explicit Model Predictive Control with Load State Observer for PMSM Drive System. In Proceedings of the 6th IEEE International Conference on Predictive Control of Electrical Drives and Power Electronics (Precede 2021), Jinan, China, 20–22 November 2021; pp. 291–295. [Google Scholar]
- Wang, H.; Su, J.Y.; Yang, G.J. Line-Constrained-Based Explicit Model Predictive Current Control for IPMSMs Drives. IEEE Trans. Power Electron. 2023, 38, 10093–10103. [Google Scholar] [CrossRef]
- Mendes, T.P.G.; Schnitman, L.; Nogueira, I.B.D.; Ribeiro, A.M.A.P.; Rodrigues, A.E.; Loureiro, J.M.; Martins, M.A.F. A new Takagi-Sugeno-Kang model-based stabilizing explicit MPC formulation: An experimental case study with implementation embedded in a PLC. Expert Syst. Appl. 2022, 210, 118369. [Google Scholar] [CrossRef]
- Wang, W.Z.; Zhang, C.; Sang, N.; Zhao, B.; Tian, Z.; Chen, S.L.; Yang, G.L. Segmented ternary composite control method considering time delay for high-speed and high-precision linear motor. Precis. Eng. 2024, 88, 584–594. [Google Scholar] [CrossRef]
- Lino, P.; Königsmarková, J.; Maione, G. Feedback-Feedforward Position and Speed Control of DC Motors by Fractional-Order Controllers. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 2584–2589. [Google Scholar]
- Nakao, M.; Ohnishi, K.; Miyachi, K. A robust decentralized joint control based on interference estimation. In Proceedings of the 1987 IEEE International Conference on Robotics and Automation, Raleigh, NC, USA, 31 March–3 April 1987; Volume 321, pp. 326–331. [Google Scholar]
- Han, J.Q. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Wang, S.H.; Li, B.L.; Chen, P.C.; Yu, W.; Peng, Y.B.; Luo, Y. A fractional-order active disturbance rejection control for permanent magnet synchronous motor position servo system. Asian J. Control 2024, 26, 3137–3147. [Google Scholar] [CrossRef]
- Chen, P.C.; Luo, Y. A Two-Degree-of-Freedom Controller Design Satisfying Separation Principle with Fractional-Order PD and Generalized ESO. IEEE/ASME Trans. Mechatron. 2022, 27, 137–148. [Google Scholar] [CrossRef]
- Wei, W.; Zhang, Z.Y.; Zuo, M. Phase leading active disturbance rejection control for a nanopositioning stage. ISA Trans. 2021, 116, 218–231. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Ding, W.; Hu, R.M.; Wu, X.; Shi, S. Sensorless Control of PMSM Drives Using Reduced Order Quasi Resonant-Based ESO and Newton-Raphson Method-Based PLL. IEEE Trans. Power Electron. 2023, 38, 229–244. [Google Scholar] [CrossRef]
- Herceg, M.; Kvasnica, M.; Jones, C.N.; Morari, M. Multi-Parametric Toolbox 3.0. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 502–510. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Parameter Value | Parameters | Parameter Value |
|---|---|---|---|
| 6.2 | 2.4 | ||
| 9.5 | 2.5 | ||
| 160 | 21.4 | ||
| 18.5 | 4.5 |
| Controller | Servo Lag/μm | Settling Time/ms |
|---|---|---|
| P-PI | 4.29 | 15.13 |
| EMPC + ESO () | 4.35 | 5.87 |
| EMPC + IPESO () | 4 | 4.75 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Z.; Chen, S.; Sun, Z.; Tang, B.; Wang, W. A Servo Control Algorithm Based on an Explicit Model Predictive Control and Extended State Observer with a Differential Compensator. Actuators 2025, 14, 281. https://doi.org/10.3390/act14060281
Dong Z, Chen S, Sun Z, Tang B, Wang W. A Servo Control Algorithm Based on an Explicit Model Predictive Control and Extended State Observer with a Differential Compensator. Actuators. 2025; 14(6):281. https://doi.org/10.3390/act14060281
Chicago/Turabian StyleDong, Zhuobo, Shuai Chen, Zheng Sun, Benyi Tang, and Wenjun Wang. 2025. "A Servo Control Algorithm Based on an Explicit Model Predictive Control and Extended State Observer with a Differential Compensator" Actuators 14, no. 6: 281. https://doi.org/10.3390/act14060281
APA StyleDong, Z., Chen, S., Sun, Z., Tang, B., & Wang, W. (2025). A Servo Control Algorithm Based on an Explicit Model Predictive Control and Extended State Observer with a Differential Compensator. Actuators, 14(6), 281. https://doi.org/10.3390/act14060281