
Evaluating the Optimum Distance between Voice Coil Actuators Using the Relative Point Localization Method on the Forearm


 , and
, and
Abstract
1. Introduction
2. Materials and Methods
2.1. The Current Goals
2.2. Equipment and Setup
2.2.1. Actuators
2.2.2. Tactile Sleeve and Hardware
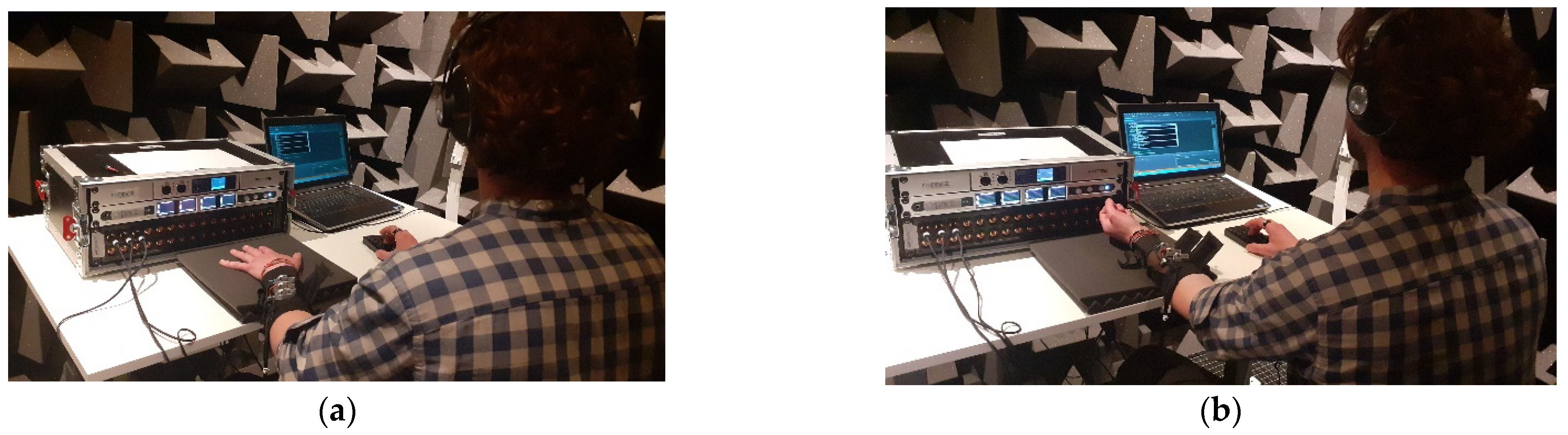
2.3. Procedure
2.3.1. Participants
2.3.2. Experiment One
2.3.3. Experiment Two
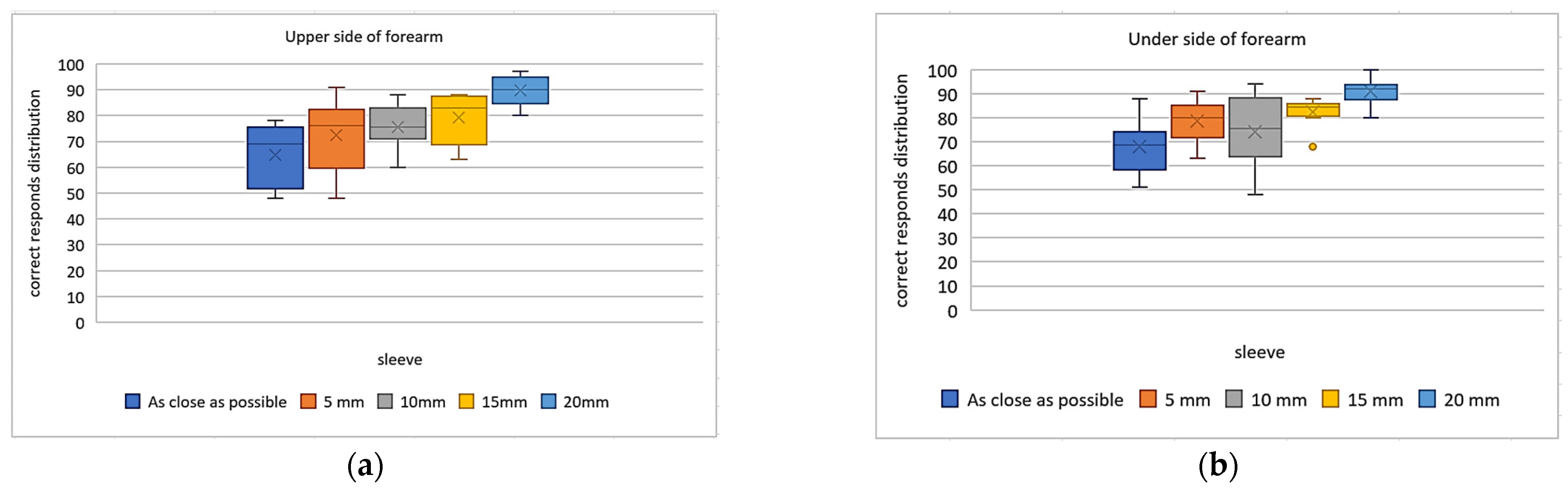
3. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jóhannesson, Ó.; Bălan, O.; Unnthorsson, R.; Moldoveanu, A.; Kristjansson, A. The Sound of Vision Project: On the Feasibility of an Audio-Haptic Representation of the Environment, for the Visually Impaired. Brain Sci. 2016, 6, 2076–3425. [Google Scholar] [CrossRef] [PubMed]
- Hoffmann, R.; Spagnol, S.; Kristjánsson, Á.; Unnthorsson, R. Evaluation of an Audio-haptic Sensory Substitution Device for Enhancing Spatial Awareness for the Visually Impaired. Optom. Vis. Sci. Off. Publ. Am. Acad. Optom. 2018, 95, 757–765. [Google Scholar] [CrossRef] [PubMed]
- Hamburger, H.L. Locognosia: The Ability to Localize Tactile Stimuli on the Body Surface. Ph.D. Thesis, University of Amsterdam, Amsterdam, The Netherlands, 1980. [Google Scholar]
- Weinstein, S. Intensive and Extensive Aspects of Tactile Sensitivity as a Function of Body Part, Sex, and Laterality. In The Skin Senses; Kenshalo, D., Ed.; Charles C. Thomas: Springfield, IL, USA, 1968; pp. 195–222. [Google Scholar]
- Helen, E.; Murry, D.J.E.H. Weber on the Tactile Senses, 1st ed.; Ross, H.E., Ed.; Psychology Press: London, UK, 1996. [Google Scholar]
- Boring, E.G. Sensation and Perception in the History of Experimental Psychology, 1st ed.; Appleton, D., Ed.; APA PsycInfo: New York, NY, USA, 1942. [Google Scholar]
- Shepherd Ivory, F. The accuracy of localization of touch stimuli on different bodily segments. Psychol. Rev. 1913, 20, 107–128. [Google Scholar]
- Friedline, C.L. The Discrimination of Cutaneous Patterns below the Two-Point Limen. Am. J. Psychol. 1918, 29, 400–419. [Google Scholar] [CrossRef]
- Parrish, C.S. Localisation of Cutaneous Impressions by Arm Movement without Pressure upon the Skin. Am. J. Psychol. 1897, 8, 250–267. [Google Scholar] [CrossRef]
- Davidon, R.S.; Mather, J.H. Cross-modal judgments of length. Am. J. Psychol. 1966, 79, 409–418. [Google Scholar] [CrossRef]
- Jones, M.B.; Vierck, C.J. Length Discrimination on the Skin. Am. J. Psychol. 1973, 86, 49–60. [Google Scholar] [CrossRef]
- Vierck, C.J., Jr.; Jones, M.B. Size discrimination on the skin. Science 1969, 163, 488–489. [Google Scholar] [CrossRef]
- Mountcastle, V.B. Medical Physiology; CV Mosby: St. Louis, MO, USA, 1974; pp. 1372–1423. [Google Scholar]
- Vallbo, B.; Johansson, S. The tactile sensory innervation of the glabrous skin of the human hand. Act. Touch 1978, 2954, 29–54. [Google Scholar]
- Appelle, S. Perception and discrimination as a function of stimulus orientation: The oblique effect in man and animals. Psychol. Bull. 1972, 78, 266–278. [Google Scholar] [CrossRef] [PubMed]
- Craig, C.; Johnson, K.O. The two-point threshold: Not a measure of tactile spatial resolution. Curr. Dir. Psychol. Sci. 2000, 9, 29–32. [Google Scholar] [CrossRef]
- Lederman, S.J.; Klatzky, R.L. Haptic perception: A tutorial. Atten. Percept. Psychophys. 2009, 71, 1439–1459. [Google Scholar] [CrossRef] [PubMed]
- Mancini, F.; Bauleo, A.; Cole, J.; Lui, F.; Porro, C.; Haggard, P.; Iannetti, G. Whole-body mapping of spatial acuity for pain and touch. Ann. Neurol. 2014, 75, 917–924. [Google Scholar] [CrossRef]
- Brodal, P. The Central Nervous System; Oxford University Press: Oxford, UK, 2010. [Google Scholar]
- Purves, D.; Augustine, G.; Fitzpatrick, D.; Hall, W.L.A.; White, L. Neurosciences; De Boeck Supérieur: Vlaams-Brabant, Belgium, 2019. [Google Scholar]
- Lundborg, G.; Rosén, B. The two-point discrimination test—Time for a re-appraisal? J. Hand Surg. 2004, 29, 418–422. [Google Scholar] [CrossRef]
- Johnson, K.; Phillips, J. Tactile spatial resolution. I. Two-point discrimination, gap detection, grating resolution, and letter recognition. J. Neurophysiol. 1981, 46, 1177–1192. [Google Scholar] [CrossRef]
- Moberg, E. Two-point discrimination test. A valuable part of hand surgical rehabilitation, e.g., in tetraplegia. Scand. J. Rehabil. Med. 1990, 22, 127–134. [Google Scholar]
- Boring, E.G. The Stimulus-Error. Am. J. Psychol. 1921, 32, 449–471. [Google Scholar] [CrossRef]
- Sen, A. The effects of set on the two-point threshold. Q. J. Exp. Psychol. 1966, 18, 169–174. [Google Scholar] [CrossRef]
- Hoffmann, R.; Valgeirsdóttir, V.V.; Jóhannesson, Ó.I.; Unnthorsson, R.; Kristjánsson, Á. Measuring relative vibrotactile spatial acuity: Effects of tactor type, anchor points and tactile anisotropy. Exp. Brain Res. 2018, 236, 3405–3416. [Google Scholar] [CrossRef]
- Hoffmann, R.; Brinkhuis, M.A.B.; Unnthorsson, R.; Kristjánsson, Á. The intensity order illusion: Temporal order of different vibrotactile intensity. J. Neurophysiol. 2019, 122, 1810–1820. [Google Scholar] [CrossRef] [PubMed]
- Jóhannesson, Ó.I.; Hoffmann, R.; Valgeirsdóttir, V.V.; Unnþórsson, R.; Moldoveanu, A.; Kristjánsson, Á. Relative vibrotactile spatial acuity of the torso. Exp. Brain Res. 2017, 235, 3505–3515. [Google Scholar] [CrossRef] [PubMed]
- Kristjánsson, Á.; Moldoveanu, A.; Jóhannesson, Ó.I.; Balan, O.; Spagnol, S.; Valgeirsdóttir, V.V.; Unnthorsson, R. Designing Sensory-substitution Devices: Principles, Pitfalls and Potential. Restor. Neurol. Neurosci. 2016, 34, 769–787. [Google Scholar] [CrossRef]
- Cholewiak, R.W.; Brill, J.; Schwab, A. Vibrotactile localization on the abdomen: Effects of place and space. Percept. Psychophys. 2004, 66, 970–987. [Google Scholar] [CrossRef]
- Lindeman, R.; Yanagida, Y. Empirical studies for effective near-field haptics in virtual environments. In Proceedings of the IEEE Virtual Reality, Los Angeles, CA, USA, 22–26 March 2003; pp. 287–288. [Google Scholar]
- Eskildsen, P.; Morris, A.; Collins, C.; Bach, R.P. Simultaneous and successive cutaneous two-point thresholds for vibration. Psychon. Sci. 1969, 14, 146–147. [Google Scholar] [CrossRef]
- Van Erp, J.B.F.; van Veen, H.A.; Jansen, C.; Dobbins, T. Waypoint Navigation with a Vibrotactile Waist Belt. TAP 2005, 2, 106–117. [Google Scholar]
- Novich, S.D.; Eagleman, D.M. Using space and time to encode vibrotactile information: Toward an estimate of the skin’s achievable throughput. Exp. Brain Res. 2015, 233, 2777–2788. [Google Scholar] [CrossRef]
- Lofelt GmbH Datasheet. Revision 1.4 (2019) L5 Voice Coil Actuator; Lofelt GmbH: Berlin, Germany, 2019. [Google Scholar]
- RME. “MADIfaceXT”, user’s guide, 2016, version 1.4 a New Haptic Neuroprosthetic. Sci. Rep. 2020, 10, 1. [Google Scholar]
- Bolanowski, S. Information Processing Channels in the Sense of Touch; Springer: Berlin, Germany, 1996; pp. 49–58. [Google Scholar]
- Denze, N.T.; Shengzhi, D.; Nico, S.; Enzeng, D. A Study of Cutaneous Perception Parameters for Designing Haptic Symbols towards Information Transfer. Electronics 2021, 10, 2079–9292. [Google Scholar]
- Anakwe, R.; Huntley, J.; McEachan, J. Grip strength and forearm circumference in a healthy population. J. Hand Surg. Eur. 2007, 32, 203–209. [Google Scholar] [CrossRef]
- Morioka, M.; Whitehouse, D.; Griffin, M. Vibrotactile thresholds at the fingertip, volar forearm, large toe, and heel. Somatosens. Mot. Res. 2008, 25, 101–112. [Google Scholar] [CrossRef] [PubMed]
- Hassanian, R.; Riedel, M.; Yeganeh, N. Numerical Investigation on the Acceleration Vibration Response of Linear Actuator. Sci. Res. 2022, 9, 1–7. [Google Scholar] [CrossRef]
- Piateski, E.; Jones, L. Vibrotactile pattern recognition on the arm and torso in First Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems. In Proceedings of the World Haptics Conference, Pisa, Italy, 18–20 March 2005. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimensions (W × D × H) | At rest: 17.0 × 20.5 × 6.2 mm Max displacement: 17.0 × 25.5 × 6.2 mm |
| Weight | 6 g +/− 0.5 g |
| Maximal Voltage | 1.4 Vrms at f0 |
| Resonance Frequency (f0) | 65 Hz ± 5% |
| Frequency Range | Min. 0.5 G over 35 Hz–1 kHz |
| Nominal Impedance | 8 Ω at f0 |
| Power Handling | Maximum: 320 mW |
| Current Consumption | Average at medium volume: 10 mA, bass music use-case Average at maximum volume: 57 mA, bass music use-case |
| 5 mm | 10 mm | 15 mm | 20 mm | |
|---|---|---|---|---|
| ACAP | 0.2552 | 0.0550 | 0.0186 | 0.0004 * |
| 5 mm | 0.5902 | 0.2809 | 0.0129 | |
| 10 mm | 0.4511 | 0.0107 | ||
| 15 mm | 0.0342 |
| 5 mm | 10 mm | 15 mm | 20 mm | |
|---|---|---|---|---|
| ACAP | 0.0624 | 0.03806 | 0.0096 | 0.0004 * |
| 5 mm | 0.4994 | 0.3255 | 0.0115 | |
| 10 mm | 0.1845 | 0.0164 | ||
| 15 mm | 0.0139 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yeganeh, N.; Makarov, I.; Stefánsson Thors, S.S.; Kristjánsson, Á.; Unnthorsson, R. Evaluating the Optimum Distance between Voice Coil Actuators Using the Relative Point Localization Method on the Forearm. Actuators 2023, 12, 6. https://doi.org/10.3390/act12010006
Yeganeh N, Makarov I, Stefánsson Thors SS, Kristjánsson Á, Unnthorsson R. Evaluating the Optimum Distance between Voice Coil Actuators Using the Relative Point Localization Method on the Forearm. Actuators. 2023; 12(1):6. https://doi.org/10.3390/act12010006
Chicago/Turabian StyleYeganeh, Nashmin, Ivan Makarov, Snorri Steinn Stefánsson Thors, Árni Kristjánsson, and Runar Unnthorsson. 2023. "Evaluating the Optimum Distance between Voice Coil Actuators Using the Relative Point Localization Method on the Forearm" Actuators 12, no. 1: 6. https://doi.org/10.3390/act12010006
APA StyleYeganeh, N., Makarov, I., Stefánsson Thors, S. S., Kristjánsson, Á., & Unnthorsson, R. (2023). Evaluating the Optimum Distance between Voice Coil Actuators Using the Relative Point Localization Method on the Forearm. Actuators, 12(1), 6. https://doi.org/10.3390/act12010006