
An Origami-Inspired Negative Pressure Folding Actuator Coupling Hardness with Softness


Abstract
1. Introduction
2. Materials and Methods
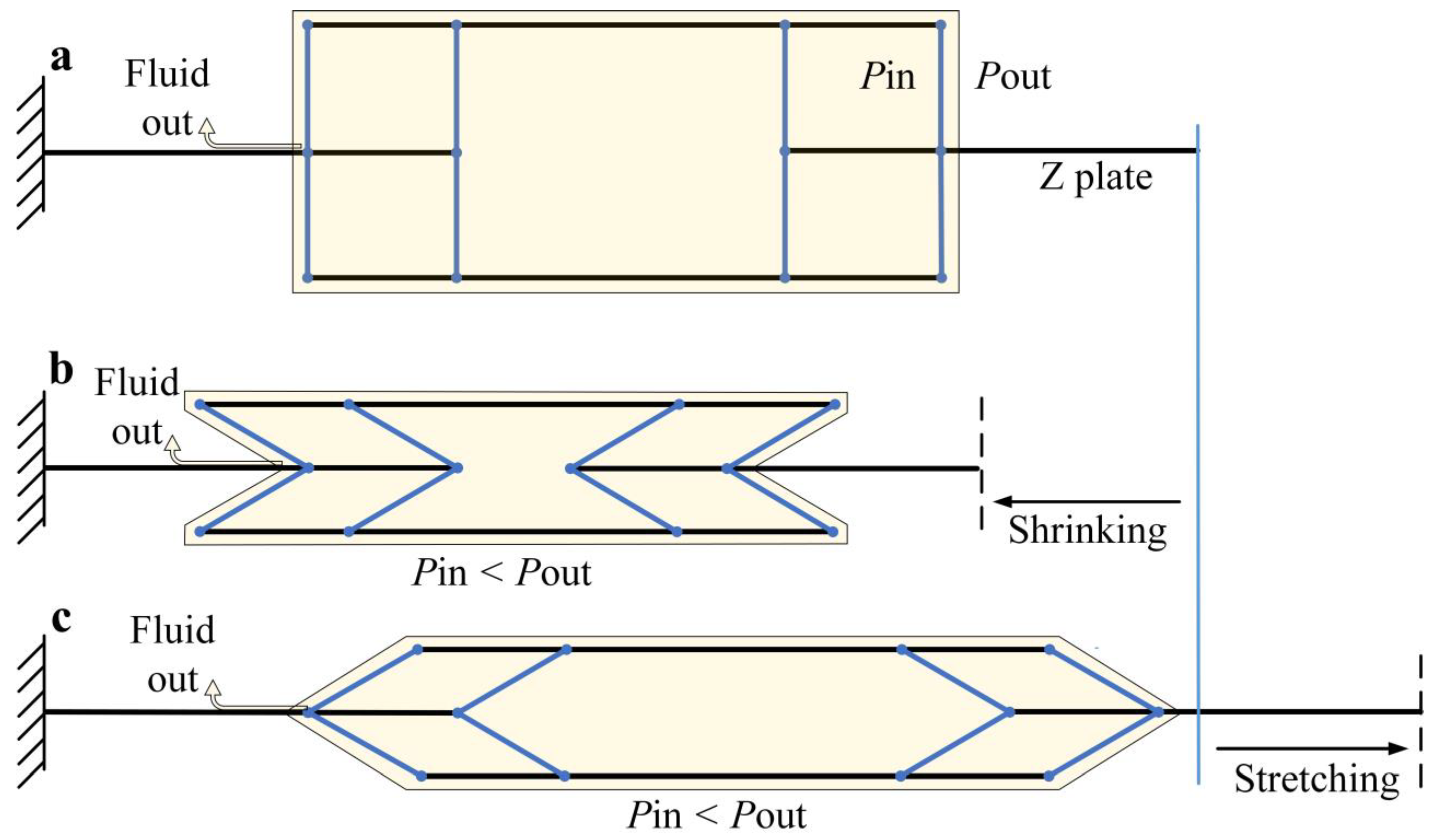
2.1. Working Principle
2.2. Structural Design and Mechanical Analysis
2.3. Fabrication of Actuator Prototypes
2.3.1. Patched Actuator
2.3.2. Machined Actuator
2.3.3. 3D Printed Actuator
3. Results and Discussion
3.1. Experimental Setup
3.2. Performance Test
3.2.1. Test Results and Analysis
3.2.2. Performance Comparison among Different Actuators
3.3. Demonstration of Actuators
4. Conclusions
- They can work in air or water, driven by negative pressure fluid, air, or liquid. In addition, they are portable thanks to their folding structures.
- They are suitable for pushing or pulling heavy loads, owing to their large output force in a small range of strokes in two ways.
- In some scenes requiring highly reliable clamping, they can drive a robotic end effector to clamp a heavy object with high force retention. On the other hand, they can occasionally adapt well to the gradually increasing load.
- They can also apply to scenes where explosive force is required.
- Moreover, our actuators can also be combined in series or parallel to expand their applications.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Stano, G.; Percoco, G. Additive manufacturing aimed to soft robots fabrication: A review. Extreme Mech. Lett. 2021, 42, 101079. [Google Scholar] [CrossRef]
- Zaidi, S.; Maselli, M.; Laschi, C.; Cianchetti, M. Actuation Technologies for Soft Robot Grippers and Manipulators: A Review. Curr. Robot. Rep. 2021, 2, 355–369. [Google Scholar] [CrossRef]
- Pan, M.; Yuan, C.; Liang, X.; Dong, T.; Liu, T.; Zhang, J.; Zou, J.; Yang, H.; Bowen, C. Soft Actuators and Robotic Devices for Rehabilitation and Assistance. Adv. Intell. Syst. 2022, 4, 2100140. [Google Scholar] [CrossRef]
- Calisti, M.; Giorelli, M.; Levy, G.; Mazzolai, B.; Hochner, B.; Laschi, C.; Dario, P. An octopus-bioinspired solution to movement and manipulation for soft robots. Bioinspir. Biomim. 2011, 6, 036002. [Google Scholar] [CrossRef] [PubMed]
- Shahid, Z.; Glatman, A.L.; Ryu, S.C. Design of a Soft Composite Finger with Adjustable Joint Stiffness. Soft Robot. 2019, 6, 722–732. [Google Scholar] [CrossRef] [PubMed]
- Lin, N.; Wu, P.; Wang, M.; Wei, J.; Yang, F.; Xu, S.; Ye, Z.; Chen, X. IMU-Based Active Safe Control of a Variable Stiffness Soft Actuator. IEEE Robot. Autom. Lett. 2019, 4, 1247–1254. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Ren, T.; Li, Y.; Choi, S.H. Precharged Pneumatic Soft Actuators and Their Applications to Untethered Soft Robots. Soft Robot. 2018, 5, 567–575. [Google Scholar] [CrossRef]
- Mazzolai, B.; Margheri, L.; Cianchetti, M.; Dario, P.; Laschi, C. Soft-robotic arm inspired by the octopus: II. From artificial requirements to innovative technological solutions. Bioinspir. Biomim. 2012, 7, 025005. [Google Scholar] [CrossRef]
- Cianchetti, M.; Calisti, M.; Margheri, L.; Kuba, M.; Laschi, C. Bioinspired locomotion and grasping in water: The soft eight-arm OCTOPUS robot. Bioinspir. Biomim. 2015, 10, 035003. [Google Scholar] [CrossRef]
- Yin, H.; Tian, L.; Yang, G. Design of fibre array muscle for soft finger with variable stiffness based on nylon and shape memory alloy. Adv. Robot. 2020, 34, 599–609. [Google Scholar] [CrossRef]
- Huang, X.; Ford, M.; Patterson, Z.J.; Zarepoor, M.; Pan, C.; Majidi, C. Shape memory materials for electrically-powered soft machines. J. Mater. Chem. B 2020, 8, 4539–4551. [Google Scholar] [CrossRef] [PubMed]
- Behl, M.; Kratz, K.; Zotzmann, J.; Nöchel, U.; Lendlein, A. Reversible Bidirectional Shape-Memory Polymers. Adv. Mater. 2013, 25, 4466–4469. [Google Scholar] [CrossRef] [PubMed]
- Youn, J.-H.; Jeong, S.M.; Hwang, G.; Kim, H.; Hyeon, K.; Park, J.; Kyung, K.-U. Dielectric Elastomer Actuator for Soft Robotics Applications and Challenges. Appl. Sci. 2020, 10, 640. [Google Scholar] [CrossRef]
- Moss, A.; Krieg, M.; Mohseni, K. Modeling and Characterizing a Fiber-Reinforced Dielectric Elastomer Tension Actuator. IEEE Robot. Autom. Lett. 2021, 6, 1264–1271. [Google Scholar] [CrossRef]
- Li, W.-B.; Zhang, W.-M.; Zou, H.-X.; Peng, Z.-K.; Meng, G. A Fast Rolling Soft Robot Driven by Dielectric Elastomer. IEEE/ASME Trans. Mechatron. 2018, 23, 1630–1640. [Google Scholar] [CrossRef]
- Liang, W.; Liu, H.; Wang, K.; Qian, Z.; Ren, L.; Ren, L. Comparative study of robotic artificial actuators and biological muscle. Adv. Mech. Eng. 2020, 12, 1687814020933409. [Google Scholar] [CrossRef]
- Wang, H.; Chen, J.; Lau, H.Y.K.; Ren, H. Motion Planning Based on Learning from Demonstration for Multiple-Segment Flexible Soft Robots Actuated by Electroactive Polymers. IEEE Robot. Autom. Lett. 2016, 1, 391–398. [Google Scholar] [CrossRef]
- Ishiki, A.; Nabae, H.; Kodaira, A.; Suzumori, K. PF-IPMC: Paper/Fabric Assisted IPMC Actuators for 3D Crafts. IEEE Robot. Autom. Lett. 2020, 5, 4035–4041. [Google Scholar] [CrossRef]
- Yi, X.; Chakarvarthy, A.; Chen, Z. Cooperative Collision Avoidance Control of Servo/IPMC Driven Robotic Fish with Back-Relaxation Effect. IEEE Robot. Autom. Lett. 2021, 6, 1816–1823. [Google Scholar] [CrossRef]
- Zhu, Z.; Bian, C.; Ru, J.; Bai, W.; Chen, H. Rapid deformation of IPMC under a high electrical pulse stimulus inspired by action potential. Smart Mater. Struct. 2019, 28, 01LT01. [Google Scholar] [CrossRef]
- Tang, X.; Li, H.; Ma, T.; Yang, Y.; Luo, J.; Wang, H.; Jiang, P. A Review of Soft Actuator Motion: Actuation, Design, Manufacturing and Applications. Actuators 2022, 11, 331. [Google Scholar] [CrossRef]
- Rich, S.I.; Wood, R.J.; Majidi, C. Untethered soft robotics. Nat. Electron. 2018, 1, 102–112. [Google Scholar] [CrossRef]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Chung, S.E.; Choi, S.-E.; Lee, H.; Kim, J.; Kwon, S. Programming magnetic anisotropy in polymeric microactuators. Nat. Mater. 2011, 10, 747–752. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Yuk, H.; Zhao, R.; Chester, S.A.; Zhao, X. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature 2018, 558, 274–279. [Google Scholar] [CrossRef]
- Kim, Y.; Parada, G.A.; Liu, S.; Zhao, X. Ferromagnetic soft continuum robots. Sci. Robot. 2019, 4, eaax7329. [Google Scholar] [CrossRef]
- Sudhawiyangkul, T.; Yoshida, K.; Eom, S.I.; Kim, J.W. A Multi-DOF Soft Microactuator Integrated with Flexible Electro-Rheological Microvalves Using an Alternating Pressure Source. Smart Mater. Struct. 2021, 30, 085006. [Google Scholar] [CrossRef]
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3. [Google Scholar] [CrossRef]
- Kalita, B.; Leonessa, A.; Dwivedy, S.K. A Review on the Development of Pneumatic Artificial Muscle Actuators: Force Model and Application. Actuators 2022, 11, 288. [Google Scholar] [CrossRef]
- Jiao, Z.; Zhuang, Z.; Cheng, Y.; Deng, X.; Sun, C.; Yu, Y.; Li, F. Lightweight Dual-Mode Soft Actuator Fabricated from Bellows and Foam Material. Actuators 2022, 11, 245. [Google Scholar] [CrossRef]
- Hao, Y.; Gong, Z.; Xie, Z.; Guan, S.; Yang, X.; Wang, T.; Wen, L. A Soft Bionic Gripper with Variable Effective Length. J. Bionic Eng. 2018, 15, 220–235. [Google Scholar] [CrossRef]
- Yan, J.; Xu, Z.; Shi, P.; Zhao, J. A Human-Inspired Soft Finger with Dual-Mode Morphing Enabled by Variable Stiffness Mechanism. Soft Robot. 2021, 9, 399–411. [Google Scholar] [CrossRef]
- Sparrman, B.; du Pasquier, C.; Thomsen, C.; Darbari, S.; Rustom, R.; Laucks, J.; Shea, K.; Tibbits, S. Printed silicone pneumatic actuators for soft robotics. Addit. Manuf. 2021, 40, 101860. [Google Scholar] [CrossRef]
- Pan, M.; Yuan, C.; Anpalagan, H.; Plummer, A.; Zou, J.; Zhang, J.; Bowen, C. Soft Controllable Carbon Fibre-Based Piezore-sistive Self-Sensing Actuators. Actuators 2020, 9, 79. [Google Scholar] [CrossRef]
- Bell, M.A.; Gorissen, B.; Bertoldi, K.; Weaver, J.C.; Wood, R.J. A Modular and Self-Contained Fluidic Engine for Soft Actuators. Adv. Intell. Syst. 2021, 4, 2100094. [Google Scholar] [CrossRef]
- Wang, B.; Guo, W.; Feng, S.; Hongdong, Y.; Wan, F.; Song, C. Volumetrically Enhanced Soft Actuator with Proprioceptive Sensing. IEEE Robot. Autom. Lett. 2021, 6, 5284–5291. [Google Scholar] [CrossRef]
- Ke, X.; Jang, J.; Chai, Z.; Yong, H.; Zhu, J.; Chen, H.; Guo, C.F.; Ding, H.; Wu, Z. Stiffness Preprogrammable Soft Bending Pneumatic Actuators for High-Efficient, Conformal Operation. Soft Robot. 2021, 9, 613–624. [Google Scholar] [CrossRef] [PubMed]
- Wirekoh, J.; Park, Y.-L. Design of flat pneumatic artificial muscles. Smart Mater. Struct. 2017, 26, 035009. [Google Scholar] [CrossRef]
- Wirekoh, J.; Valle, L.; Pol, N.; Park, Y.-L. Sensorized, Flat, Pneumatic Artificial Muscle Embedded with Biomimetic Microfluidic Sensors for Proprioceptive Feedback. Soft Robot. 2019, 6, 768–777. [Google Scholar] [CrossRef]
- Hu, L.; Gau, D.; Nixon, J.; Klein, M.; Fan, Y.; Menary, G.; Roche, E.T. Precurved, Fiber-Reinforced Actuators Enable Pneumatically Efficient Replication of Complex Biological Motions. Soft Robot. 2021, 9, 293–308. [Google Scholar] [CrossRef]
- Yang, H.D.; Greczek, B.T.; Asbeck, A.T. Modeling and Analysis of a High-Displacement Pneumatic Artificial Muscle with Integrated Sensing. Front. Robot. AI 2019, 5, 136. [Google Scholar] [CrossRef]
- Shaheen, R.; Doumit, M.; Helal, A. Design and characterization of a hyperelastic tubular soft composite. J. Mech. Behav. Biomed. Mater. 2017, 75, 228–235. [Google Scholar] [CrossRef] [PubMed]
- Al-Fahaam, H.; Davis, S.; Nefti-Meziani, S. The design and mathematical modelling of novel extensor bending pneumatic artificial muscles (EBPAMs) for soft exoskeletons. Robot. Auton. Syst. 2018, 99, 63–74. [Google Scholar] [CrossRef]
- Guan, Q.; Sun, J.; Liu, Y.; Wereley, N.M.; Leng, J. Novel Bending and Helical Extensile/Contractile Pneumatic Artificial Muscles Inspired by Elephant Trunk. Soft Robot. 2020, 7, 597–614. [Google Scholar] [CrossRef] [PubMed]
- Zhu, M.; Do, T.N.; Hawkes, E.; Visell, Y. Fluidic Fabric Muscle Sheets for Wearable and Soft Robotics. Soft Robot. 2020, 7, 179–197. [Google Scholar] [CrossRef]
- Kim, W.; Park, H.; Kim, J. Compact Flat Fabric Pneumatic Artificial Muscle (ffPAM) for Soft Wearable Robotic Devices. IEEE Robot. Autom. Lett. 2021, 6, 2603–2610. [Google Scholar] [CrossRef]
- Naclerio, N.D.; Hawkes, E.W. Simple, Low-Hysteresis, Foldable, Fabric Pneumatic Artificial Muscle. IEEE Robot. Autom. Lett. 2020, 5, 3406–3413. [Google Scholar] [CrossRef]
- Kulasekera, A.L.; Arumathanthri, R.B.; Chathuranga, D.S.; Gopura, R.; Lalitharatne, T.D. A thin-walled vacuum actuator (ThinVAc) and the development of multi-filament actuators for soft robotic applications. Sens. Actuators A Phys. 2021, 332, 113088. [Google Scholar] [CrossRef]
- Yu, B.; Yang, J.; Du, R.; Zhong, Y. A Versatile Pneumatic Actuator Based on Scissor Mechanisms: Design, Modeling, and Experiments. IEEE Robot. Autom. Lett. 2021, 6, 1288–1295. [Google Scholar] [CrossRef]
- Li, S.; Vogt, D.M.; Rus, D.; Wood, R.J. Fluid-driven origami-inspired artificial muscles. Proc. Natl. Acad. Sci. USA 2017, 114, 13132–13137. [Google Scholar] [CrossRef]
- Li, S.; Vogt, D.M.; Bartlett, N.W.; Rus, D.; Wood, R.J. Tension Pistons: Amplifying Piston Force Using Fluid-Induced Tension in Flexible Materials. Adv. Funct. Mater. 2019, 29, 1901419. [Google Scholar] [CrossRef]
- Lee, J.-G.; Rodrigue, H. Origami-Based Vacuum Pneumatic Artificial Muscles with Large Contraction Ratios. Soft Robot. 2019, 6, 109–117. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Xia, H.; Lee, D.-Y.; Firouzeh, A.; Park, Y.-L.; Cho, K.-J. A Positive Pressure Jamming Based Variable Stiffness Structure and its Application on Wearable Robots. IEEE Robot. Autom. Lett. 2021, 6, 8078–8085. [Google Scholar] [CrossRef]
- Ranzani, T.; Gerboni, G.; Cianchetti, M.; Menciassi, A. A bioinspired soft manipulator for minimally invasive surgery. Bioinspir. Biomim. 2015, 10, 035008. [Google Scholar] [CrossRef] [PubMed]
- Ranzani, T.; Cianchetti, M.; Gerboni, G.; De Falco, I.; Menciassi, A. A Soft Modular Manipulator for Minimally Invasive Sur-gery: Design and Characterization of a Single Module. IEEE Trans. Robot. 2016, 32, 187–200. [Google Scholar] [CrossRef]
- De Falco, I.; Cianchetti, M.; Menciassi, A. A soft multi-module manipulator with variable stiffness for minimally invasive surgery. Bioinspir. Biomim. 2017, 12, 056008. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Yang, Y.; Wei, Y. Passive Particle Jamming and Its Stiffening of Soft Robotic Grippers. IEEE Trans. Robot. 2017, 33, 446–455. [Google Scholar] [CrossRef]
- Yan, J.; Shi, P.; Xu, Z.; Zhao, J. A Wide-Range Stiffness-Tunable Soft Actuator Inspired by Deep-Sea Glass Sponges. Soft Robot. 2021, 9, 625–637. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Z.; Zhou, H.; Zhao, C.; Barimah, B.; Li, B.; Xiang, C.; Li, L.; Gou, X.; Luo, M. Inflatable Particle-Jammed Robotic Gripper Based on Integration of Positive Pressure and Partial Filling. Soft Robot. 2021, 9, 309–323. [Google Scholar] [CrossRef]
- Tillin, N.A.; Pain, M.T.G.; Folland, J.P. Contraction speed and type influences rapid utilisation of available muscle force: Neural and contractile mechanisms. J. Exp. Biol. 2018, 221, jeb193367. [Google Scholar] [CrossRef]
- Del Vecchio, A.; Negro, F.; Holobar, A.; Casolo, A.; Folland, J.P.; Felici, F.; Farina, D. You Are as Fast as Your Motor Neurons: Speed of Recruitment and Maximal Discharge of Motor Neurons Determine the Maximal Rate of Force Development in Hu-mans. J. Physiol. 2019, 597, 2445–2456. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actuators | (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Patched skeleton | 22 | 52 | 52 | 27 | 22 | 3 | 0 | 42 | 0.55 | 4032 | 2025 | 924 | 0 |
| Machined skeleton | 22 | 54 | 49 | 40 | 32 | 14 | 6 | 42 | 0.54 | 5875 | 3844 | 630 | 882 |
| 3D-printed skeleton | 22 | 54 | 49 | 40 | 32 | 14 | 6 | 42 | 0.54 | 5875 | 3844 | 630 | 882 |
| Test# | Pressure (kPa) | Peak Force (N) | MAE | MAPE | Maximum Absolute Error |
|---|---|---|---|---|---|
| 1 | 5.6 | 72.9 | 32.84 | 79.33 | 309.96 |
| 2 | 9.4 | 137.9 | 14.55 | 35.77 | 154.84 |
| 3 | 17.4 | 229.8 | 2.60 | 3.19 | 7.69 |
| Test# | Pressure (kPa) | Maximum Tension Force (N) | Maximum Thrust Force (N) | MAE | MAPE | Maximum Absolute Error |
|---|---|---|---|---|---|---|
| 1 | 6.6 | 243.3 | −125.2 | 11.82 | 13.82 | 42.86 |
| 2 | 18.6 | 468.1 | −410.1 | 30.58 | 37.97 | 168.86 |
| 3 | 28.5 | 722.5 | −409.5 | 46.50 | 52.37 | 144.47 |
| 4 | 38.5 | 889.3 | −628.9 | 67.85 | 77.14 | 199.03 |
| 5 | 48.5 | 1125.9 | −818.2 | 86.96 | 100.01 | 244.58 |
| Test# | Pressure (kPa) | Peak Force (N) | MAE | MAPE | Maximum Absolute Error |
|---|---|---|---|---|---|
| 1 | 6.6 | 177 | 6.81 | 6.91 | 8.41 |
| 2 | 18.6 | 324.4 | 29.89 | 36.14 | 104.76 |
| 3 | 28.5 | 441 | 47.40 | 52.93 | 128.42 |
| 4 | 38.5 | 390.7 | 73.34 | 73.59 | 86.26 |
| 5 | 48.5 | 352.5 | 117.67 | 117.95 | 130.56 |
| Test# | Pressure (kPa) | Peak Force (N) | MAE | MAPE | Maximum Absolute Error |
|---|---|---|---|---|---|
| 1 | 6.6 | 177 | 6.81 | 6.91 | 8.41 |
| 2 | 18.6 | 324.4 | 29.89 | 36.14 | 104.76 |
| 3 | 28.5 | 441 | 47.40 | 52.93 | 128.42 |
| 4 | 38.5 | 390.7 | 73.34 | 73.59 | 86.26 |
| 5 | 48.5 | 352.5 | 117.67 | 117.95 | 130.56 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, Z.; Zhao, W.; Zuo, Z.; Li, J.; Chen, I.-M. An Origami-Inspired Negative Pressure Folding Actuator Coupling Hardness with Softness. Actuators 2023, 12, 35. https://doi.org/10.3390/act12010035
Shao Z, Zhao W, Zuo Z, Li J, Chen I-M. An Origami-Inspired Negative Pressure Folding Actuator Coupling Hardness with Softness. Actuators. 2023; 12(1):35. https://doi.org/10.3390/act12010035
Chicago/Turabian StyleShao, Zhaowen, Wentao Zhao, Zhaotian Zuo, Jun Li, and I-Ming Chen. 2023. "An Origami-Inspired Negative Pressure Folding Actuator Coupling Hardness with Softness" Actuators 12, no. 1: 35. https://doi.org/10.3390/act12010035
APA StyleShao, Z., Zhao, W., Zuo, Z., Li, J., & Chen, I.-M. (2023). An Origami-Inspired Negative Pressure Folding Actuator Coupling Hardness with Softness. Actuators, 12(1), 35. https://doi.org/10.3390/act12010035