
Correlation between Ground Motion Parameters and Displacement Demands of Mid-Rise RC Buildings on Soft Soils Considering Soil-Structure-Interaction


Abstract
1. Introduction
2. Ground Motion Parameters
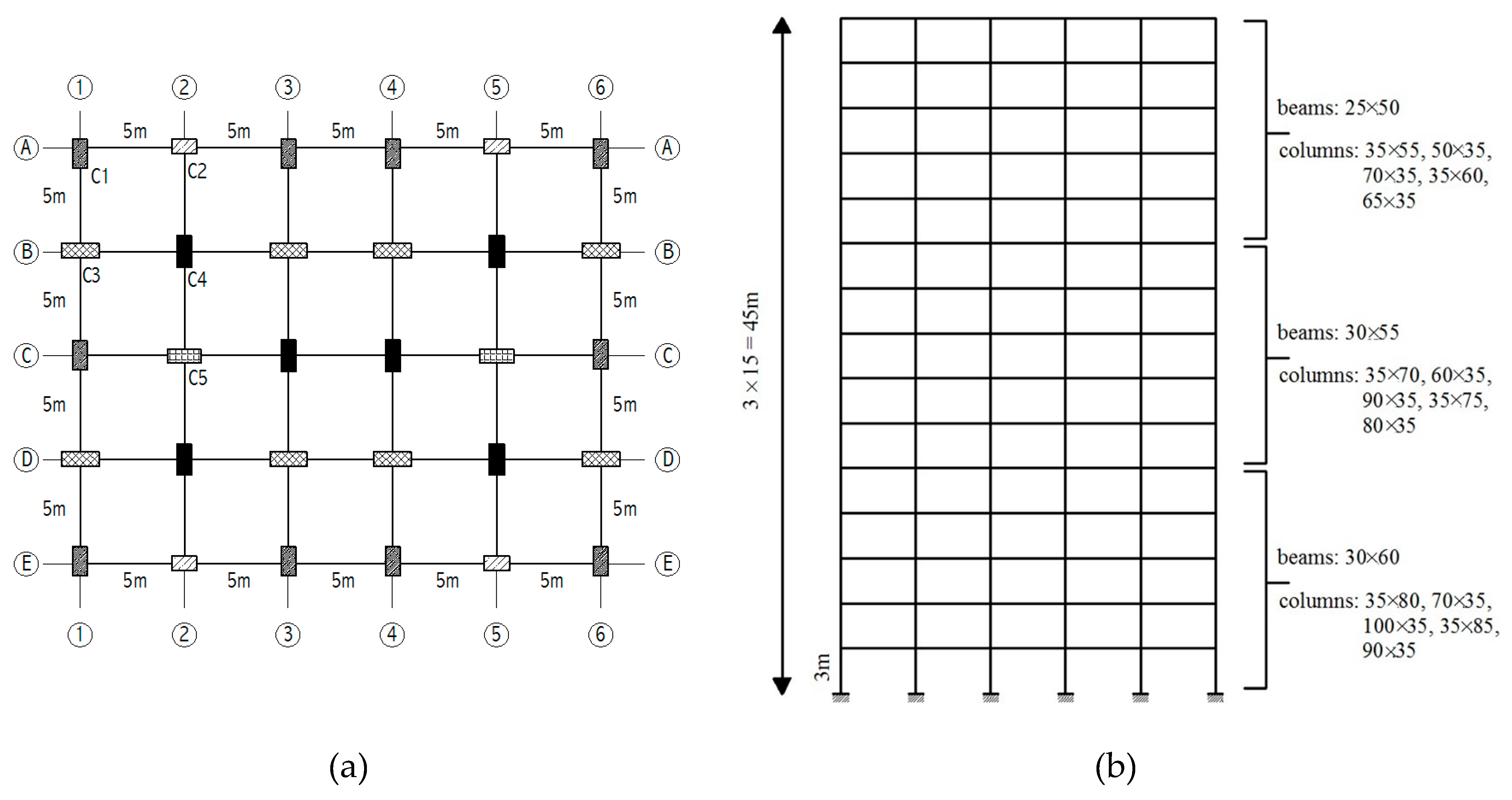
3. Properties of Structural Models
4. Geotechnical Properties of Soil Profile
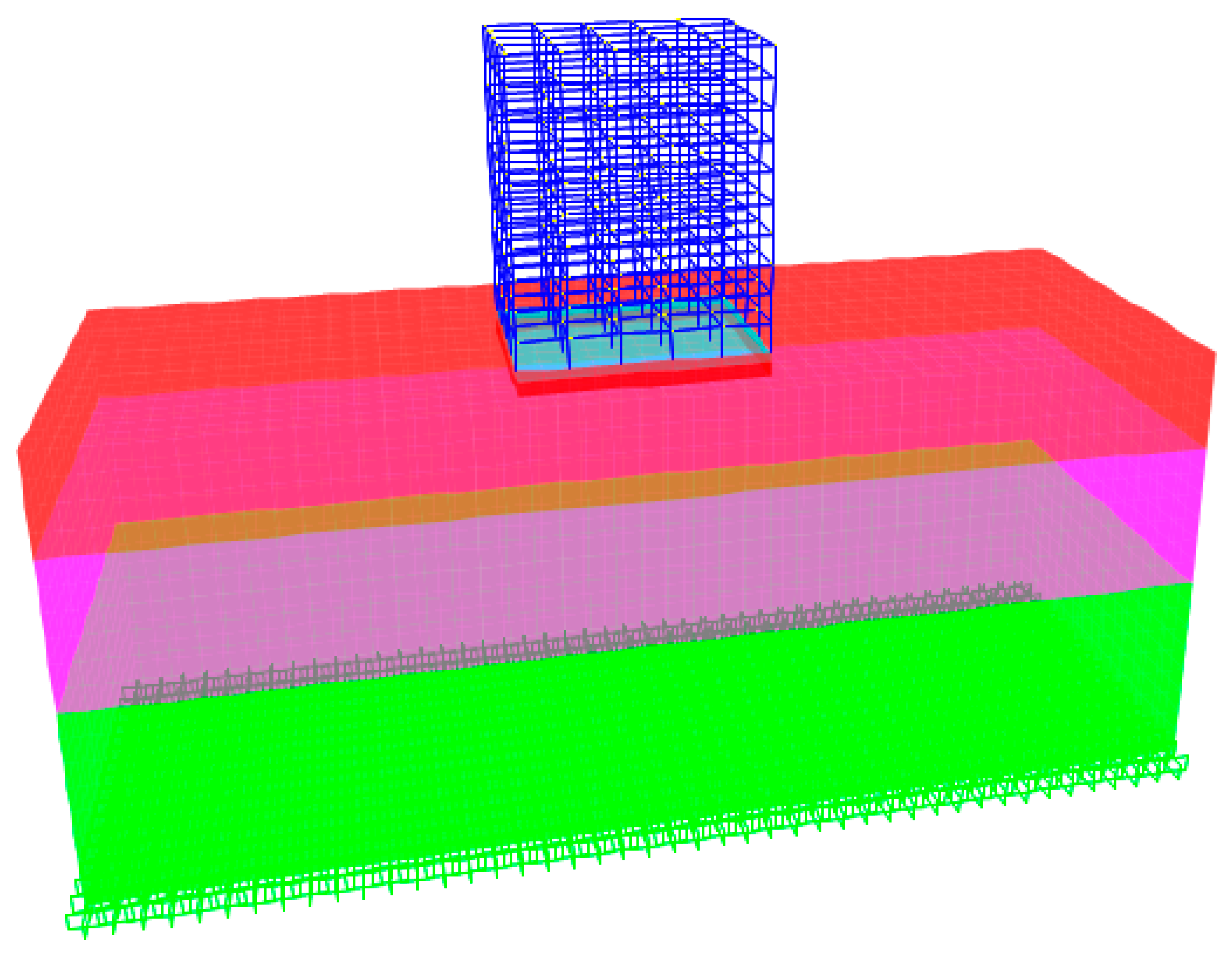
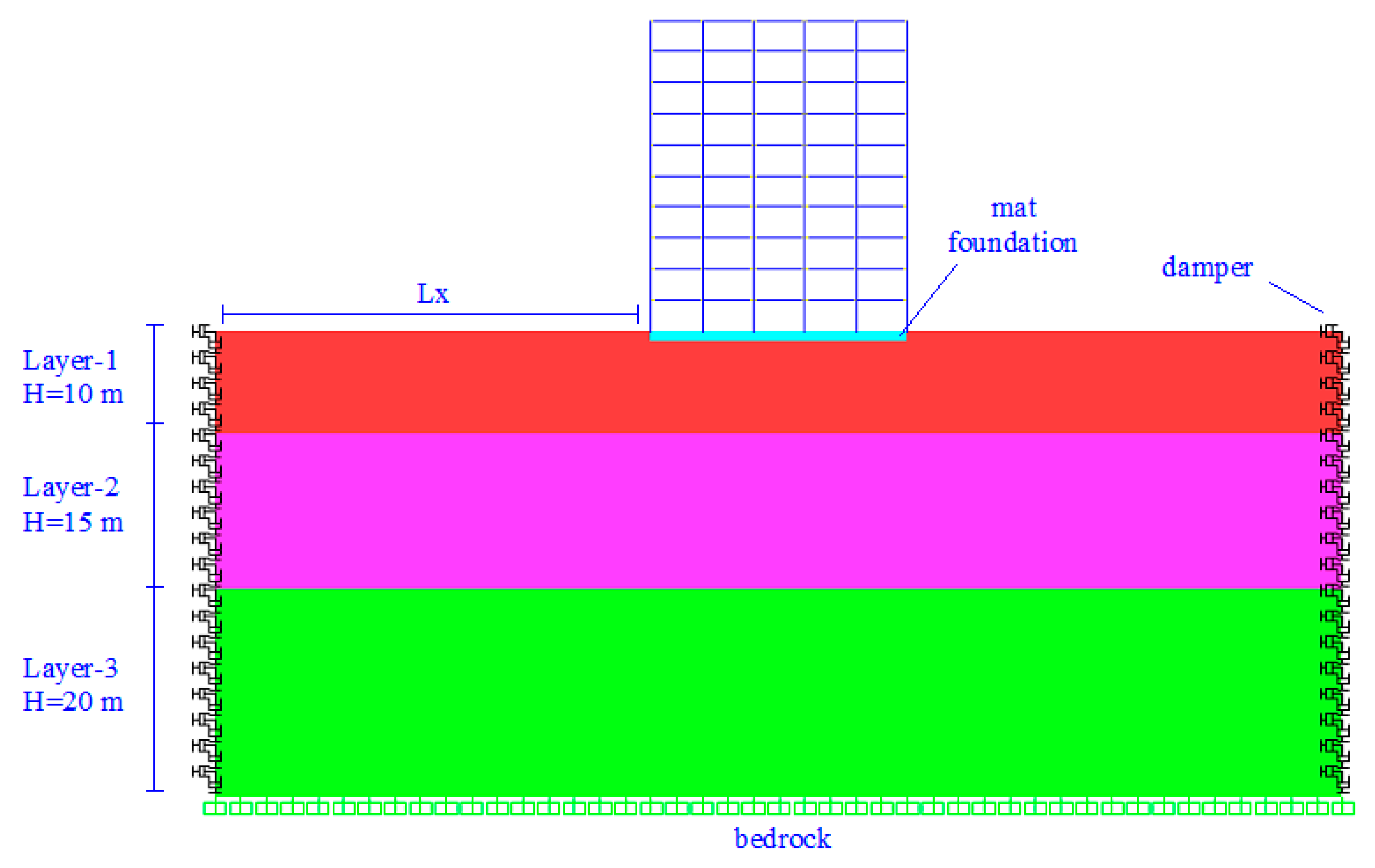
5. Description of the Soil-Structure Model
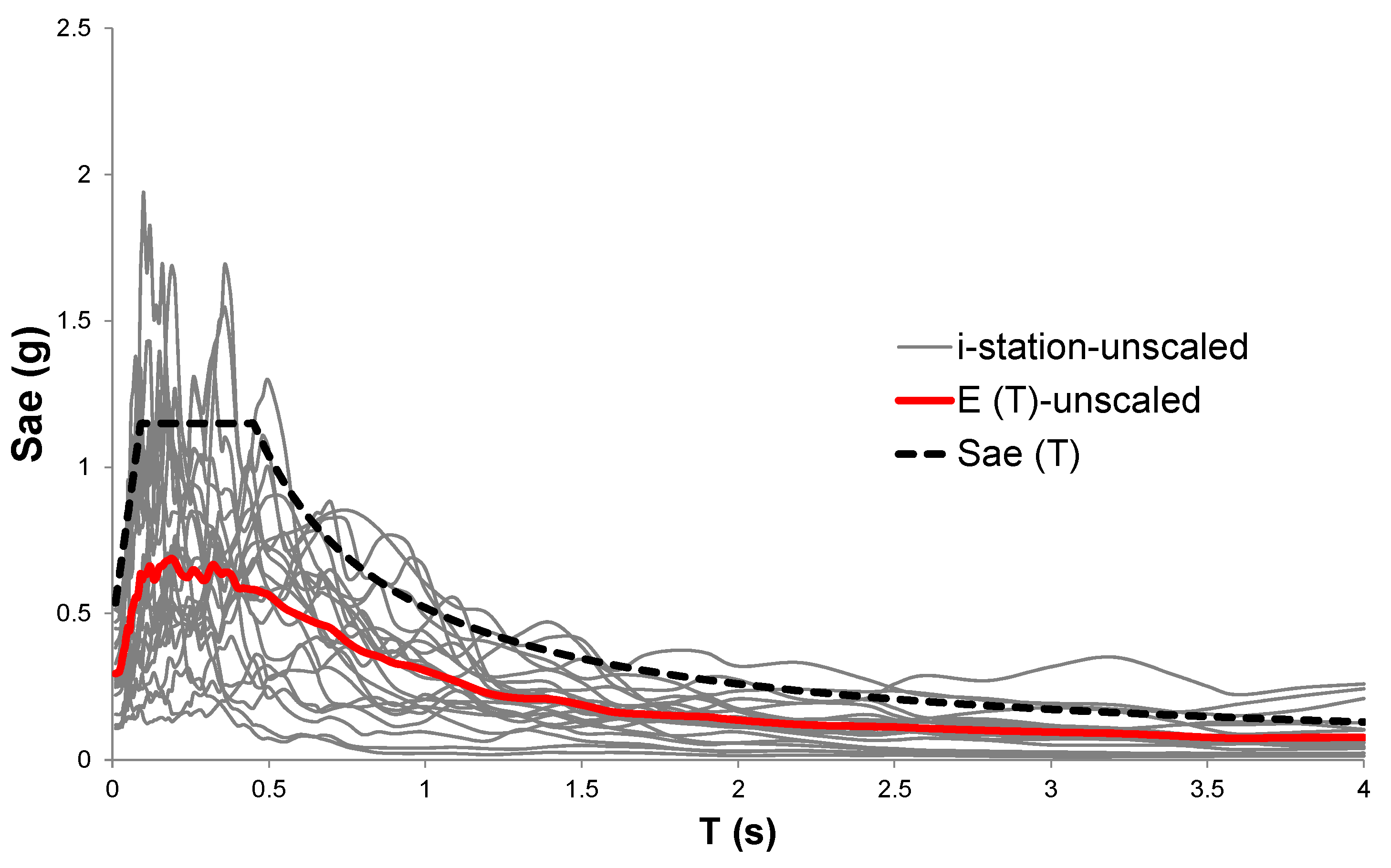
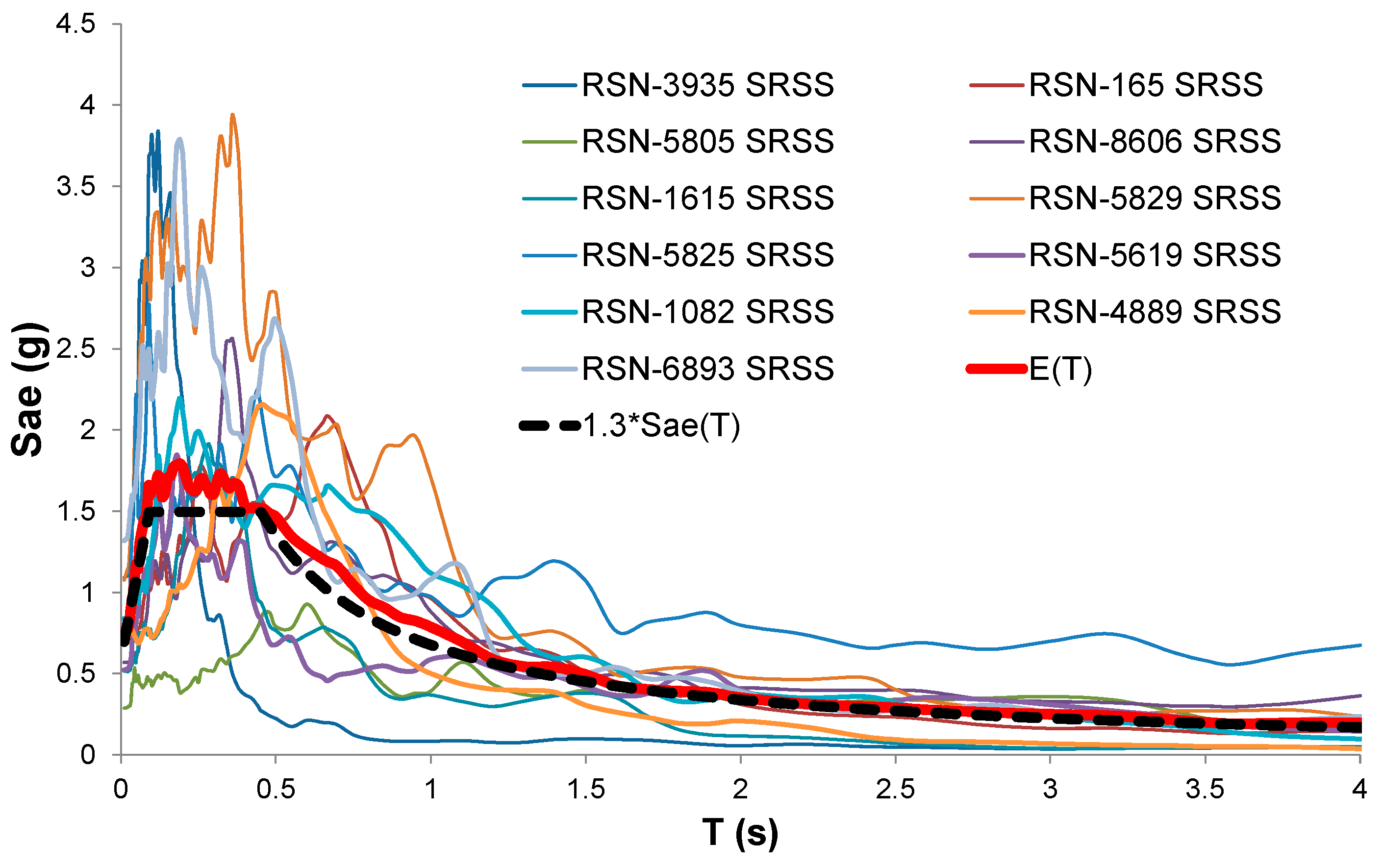
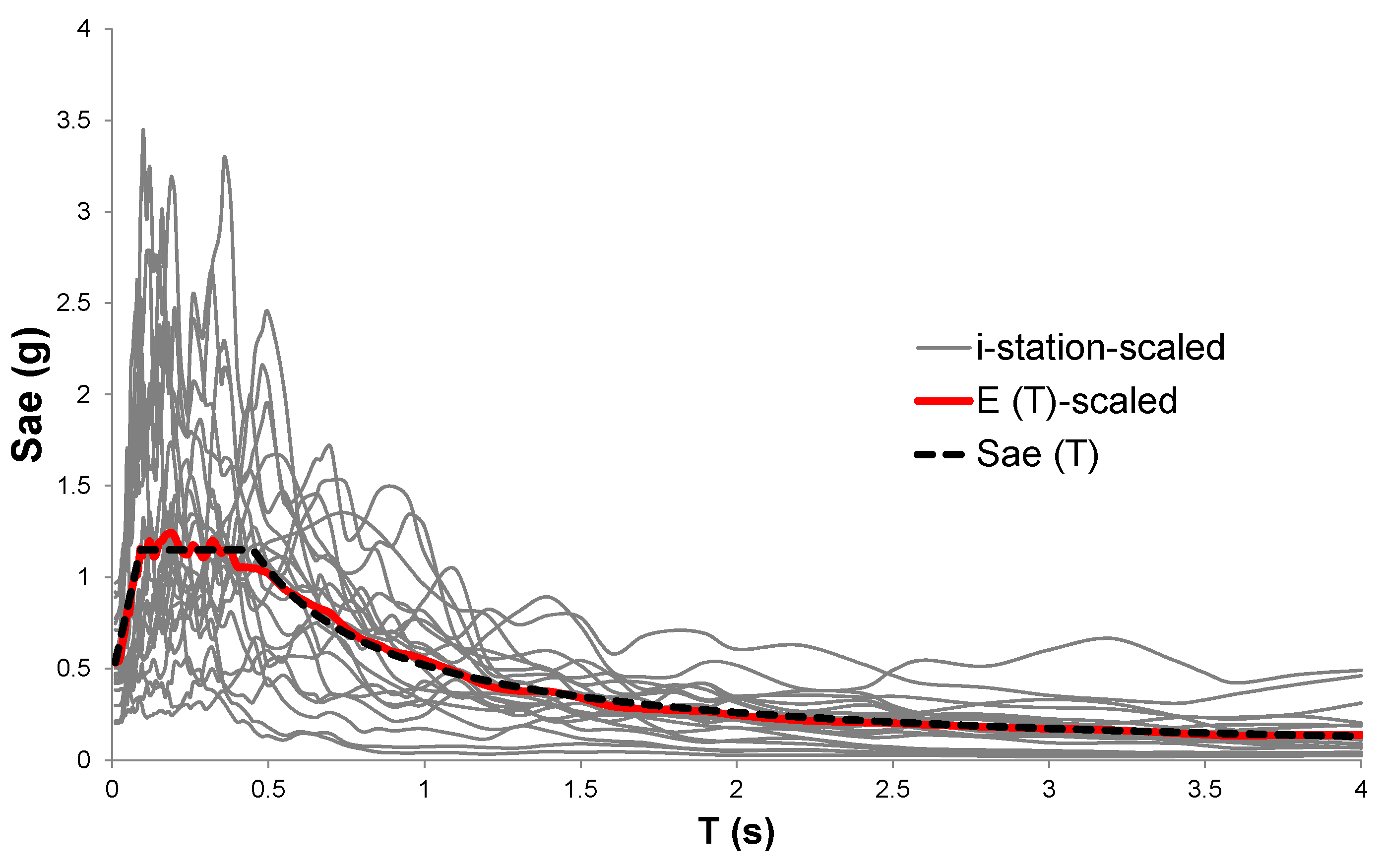
6. Selection and Scaling of Ground Motion Records
7. Correlation Analyses for Ground Motions Parameters
8. Optimization Study for Better Correlation
9. Summary and Conclusions
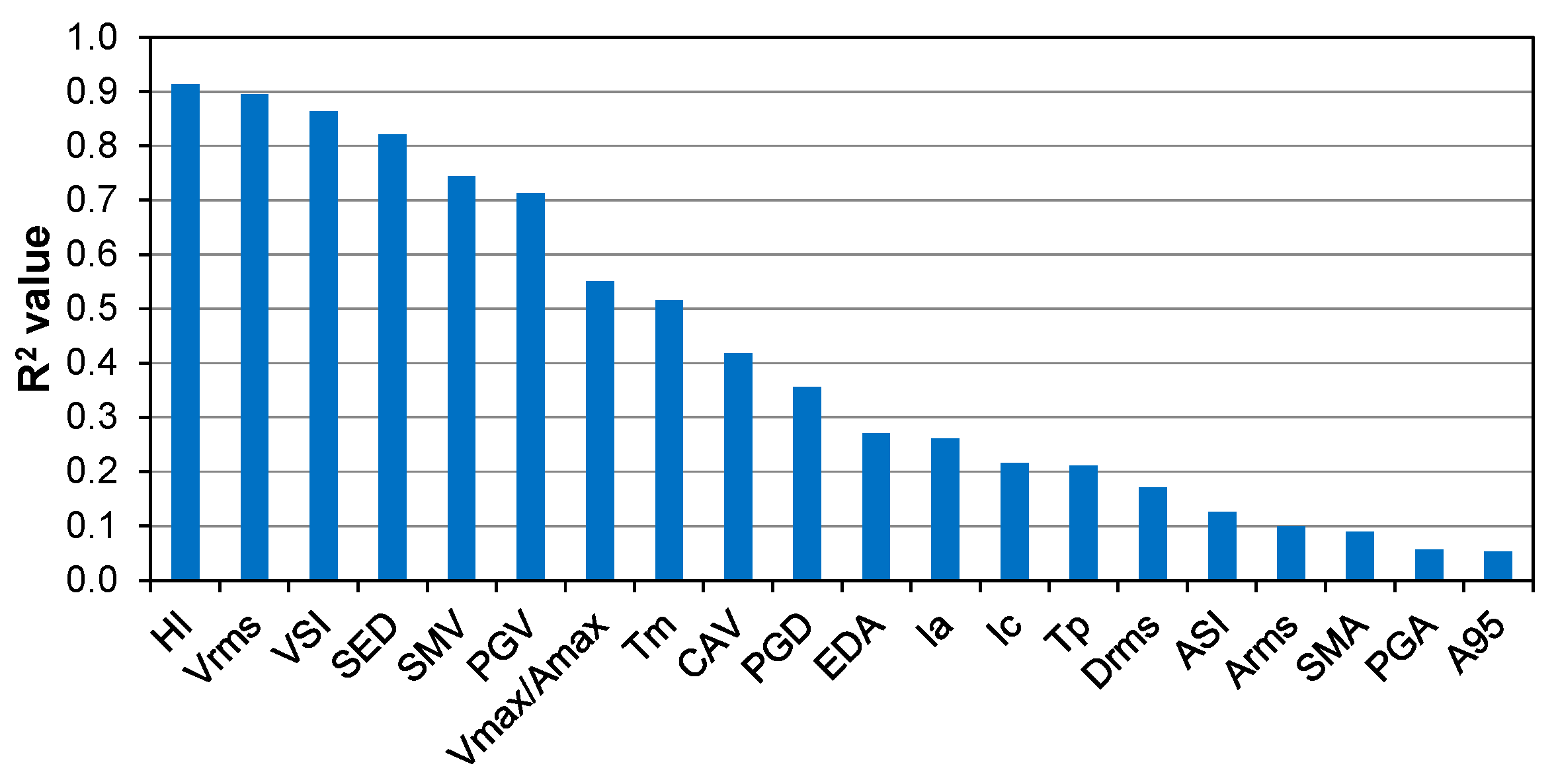
- The velocity related parameters are very effective in estimating the damage potential of building models. On the other hand, the correlation values of the parameters in the displacement and acceleration groups are too low.
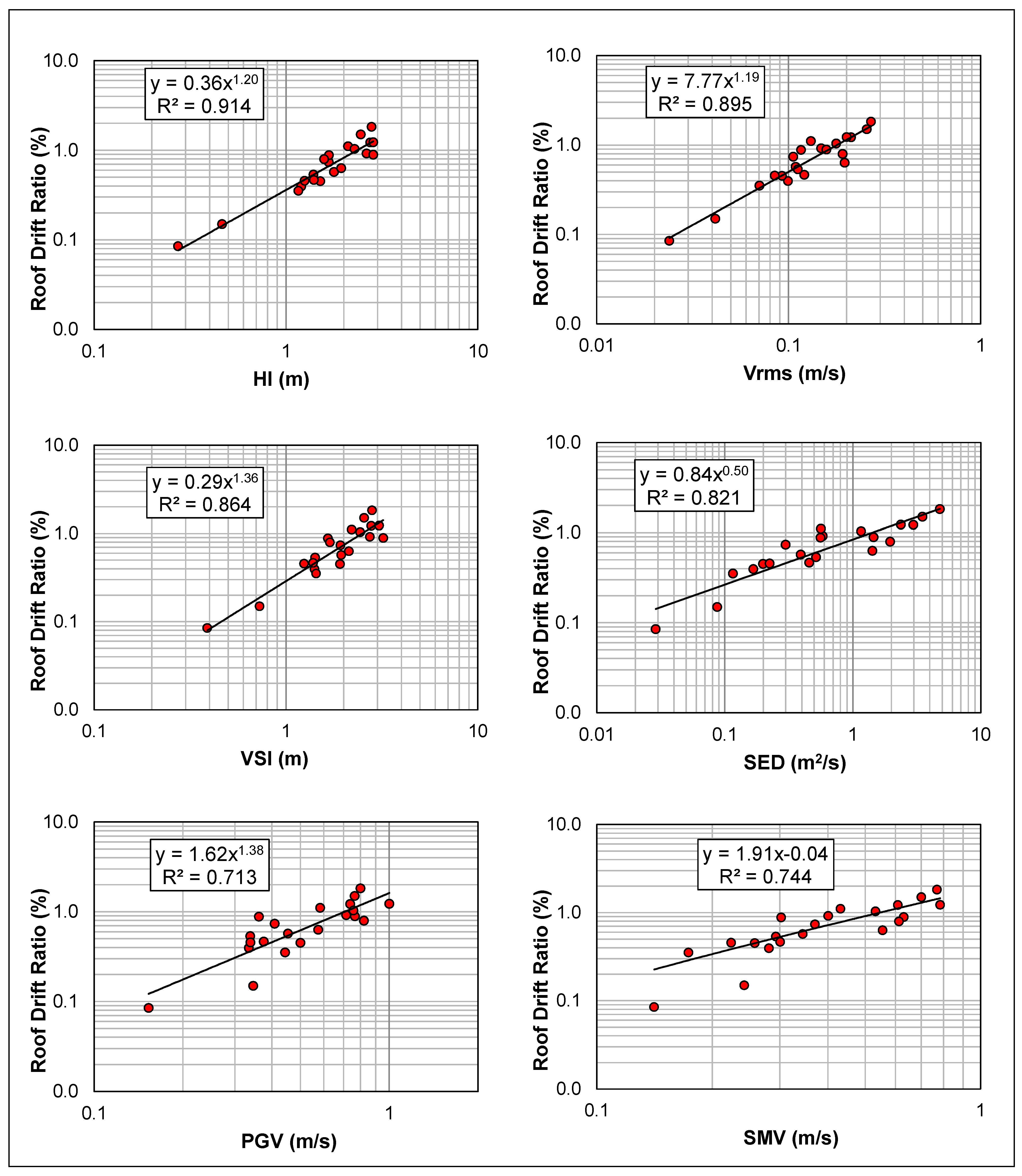
- Housner Intensity (HI) has the strongest correlation in the all parameters with its R2 value of 0.914. Moreover, Vrms, VSI, SED, SMV, and PGV have R2 values greater than 0.70. The lowest correlation value was obtained for the A95 parameter.
- HI shows the lowest scatter on the mean values of roof drift ratios by having the lowest value of the coefficient of variation (CoV).
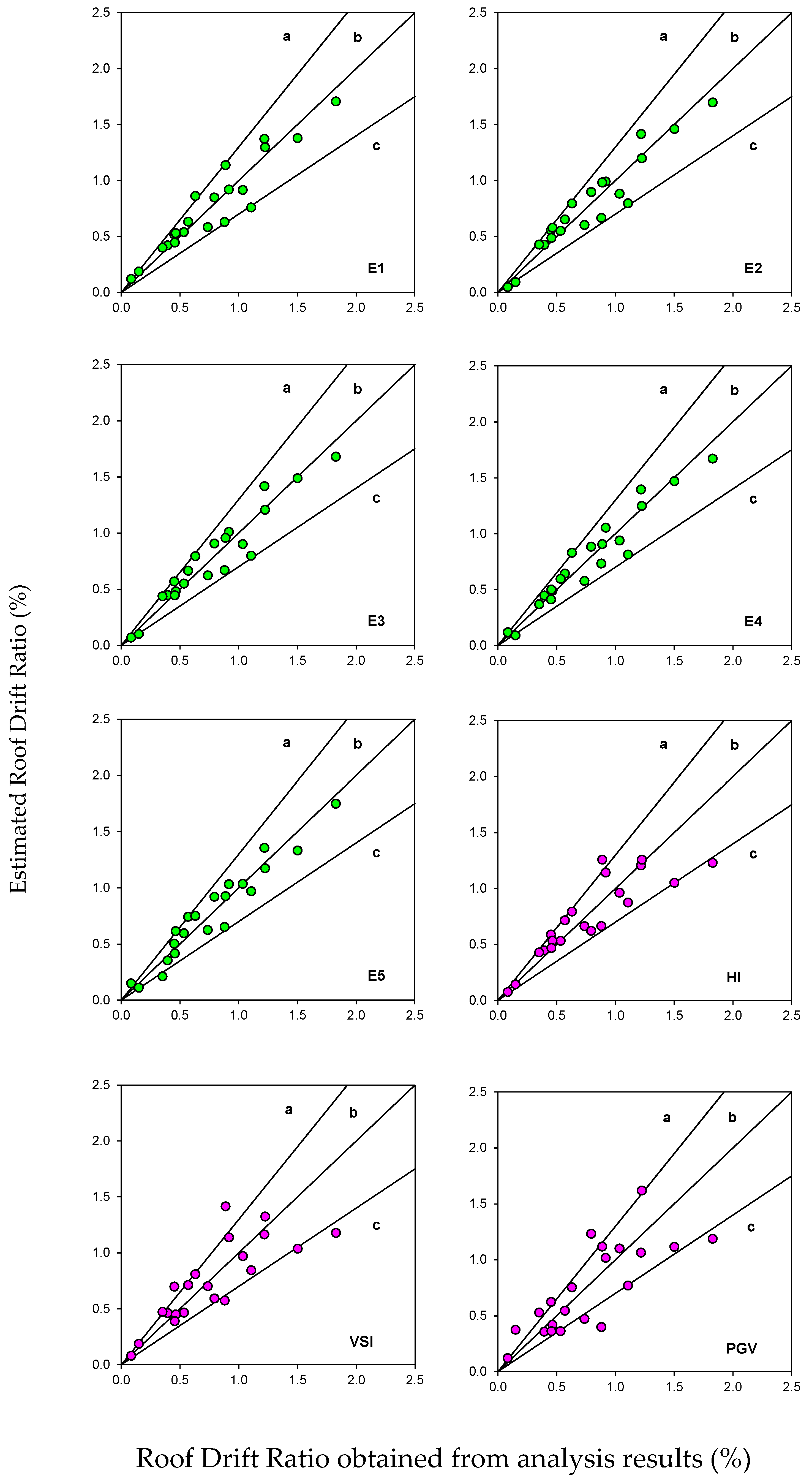
- This paper seeks a new combined multiple ground motion parameter from their combinations using DE algorithm in order to reflect the damage potential better than a single ground motion parameter. Five different equations were proposed as combined multiple ground motion parameters having R2 values between 0.95 and 0.93 for mid-rise RC frame buildings on soft soil deposit.
- The best roof drift ratio estimates are obtained using equation E3, which is a combination of Ia, SED, Tm, and HI parameters. On the other hand, the use of E1 equation including SED and HI parameters provides reasonably well estimates.
- The use of combined multiple parameters can be effective in determining seismic damages by improving the scatter at least 24% compared to the use of a single parameter.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Akkar, S.; Ozen, O. Effect of peak ground velocity on deformation demands for SDOF systems. Earthq. Eng. Struct. Dyn. 2005, 34, 1551–1571. [Google Scholar] [CrossRef]
- Cabanas, L.; Benito, B.; Herraiz, M. An approach to the measurement of the potential structural damage of earthquake ground motions. Earthq. Eng. Struct. Dyn. 1997, 26, 79–92. [Google Scholar] [CrossRef]
- Elenas, A. Interdependency between seismic acceleration parameters and the behavior of structures. Soil Dyn. Earthq. Eng. 1997, 16, 317–322. [Google Scholar]
- Elenas, A. Correlation between seismic acceleration parameters and overall structural damage indices of buildings. Soil Dyn. Earthq. Eng. 2000, 20, 93–100. [Google Scholar] [CrossRef]
- Wu, Y.-M.; Hsiao, N.-C.; Teng, T.-L. Relationships between Strong Ground Motion Peak Values and Seismic Loss during the 1999 Chi-Chi, Taiwan Earthquake. Nat. Hazards 2004, 32, 357–373. [Google Scholar] [CrossRef]
- Kramer, S.L.; Mitchell, R.A. Ground Motion Intensity Measures for Liquefaction Hazard Evaluation. Earthq. Spectra 2006, 22, 413–438. [Google Scholar] [CrossRef]
- Riddell, R. On Ground Motion Intensity Indices. Earthq. Spectra 2007, 23, 147–173. [Google Scholar] [CrossRef]
- Kadas, K.; Yakut, A.; Kazaz, I. Spectral Ground Motion Intensity Based on Capacity and Period Elongation. J. Struct. Eng. 2011, 137, 401–409. [Google Scholar] [CrossRef]
- Cao, V.V.; Ronagh, H.R. Correlation between parameters of pulse-type motions and damage of low-rise RC frames. Earthq. Struct. 2014, 7, 365–384. [Google Scholar] [CrossRef]
- Takizawa, H.; Jennings, P.C. Collapse of a model for ductile reinforced concrete frames under extreme earthquake motions. Earthq. Eng. Struct. Dyn. 1980, 8, 117–144. [Google Scholar] [CrossRef]
- Nau, J.M.; Hall, W.J. Scaling Methods for Earthquake Response Spectra. J. Struct. Eng. 1984, 110, 1533–1548. [Google Scholar] [CrossRef]
- Kostinakis, K.; Fontara, I.K.; Athanatopoulou, A.M. Scalar Structure-Specific Ground Motion Intensity Measures for Assessing the Seismic Performance of Structures: A Review. J. Earthq. Eng. 2018, 22, 630–665. [Google Scholar] [CrossRef]
- Elnashai, A.; Sarno, L.D. Fundamentals of Earthquake Engineering; John Wiley & Sons Ltd.: West Sussex, UK, 2008. [Google Scholar]
- Moustafa, A.; Takewaki, I. Characterization of earthquake ground motion of multiple sequences. Earthq. Struct. 2012, 3, 629–647. [Google Scholar] [CrossRef]
- Elenas, A.; Meskouris, K. Correlation study between seismic acceleration parameters and damage indices of structures. Eng. Struct. 2001, 23, 698–704. [Google Scholar] [CrossRef]
- Nanos, N.; Elenas, A.; Ponterosso, P. Correlation of different strong motion duration parameters and damage indicators of reinforced concrete structures. In Proceedings of the 14th World Conference on Earthquake Engineering, Bejing, China, 12–17 October 2008. [Google Scholar]
- Cao, V.V.; Ronagh, H.R. Correlation between seismic parameters of far-fault motions and damage indices of low-rise reinforced concrete frames. Soil Dyn. Earthq. Eng. 2014, 66, 102–112. [Google Scholar]
- Kostinakis, K.G.; Athanatopoulou, A.M. Evaluation of scalar structure-specific ground motion intensity measures for seismic response prediction of earthquake resistant 3D buildings. Earthq. Struct. 2015, 9, 1091–1114. [Google Scholar] [CrossRef]
- Yakut, A.; Yılmaz, H. Correlation of Deformation Demands with Ground Motion Intensity. J. Struct. Eng. 2008, 134, 1818–1828. [Google Scholar] [CrossRef]
- Ozmen, H.B.; Inel, M. Damage potential of earthquake records for RC building stock. Earthq. Struct. 2016, 10, 1315–1330. [Google Scholar] [CrossRef]
- Ozmen, H.B. Developing hybrid parameters for measuring damage potential of earthquake records: Case for RC building stock. Bull. Earthq. Eng. 2016, 15, 3083–3101. [Google Scholar] [CrossRef]
- Tabatabaiefar, H.R.; Massumi, A. A simplified method to determine seismic responses of reinforced concrete moment resisting building frames under influence of soil–structure interaction. Soil Dyn. Earthq. Eng. 2010, 30, 1259–1267. [Google Scholar] [CrossRef]
- Fatahi, B.; Tabatabaiefar, H.R. Fully nonlinear versus equivalent linear computation method for seismic analysis of midrise buildings on soft soils. Int. J. Geomech. ASCE 2014, 14, 04014016. [Google Scholar] [CrossRef]
- Ghandil, M.; Behnamfar, F. The near-field method for dynamic analysis of structures on soft soils including inelastic soil–structure interaction. Soil Dyn. Earthq. Eng. 2015, 75, 1–17. [Google Scholar] [CrossRef]
- Ghandil, M.; Behnamfar, F. Ductility demands of MRF structures on soft soils considering soil-structure interaction. Soil Dyn. Earthq. Eng. 2017, 92, 203–214. [Google Scholar] [CrossRef]
- Borja, R.I.; Wu, W.; Amies, A.P.; Smith, H.A. Nonlinear Lateral, Rocking, and Torsional Vibration of Rigid Foundations. J. Geotech. Eng. 1994, 120, 491–513. [Google Scholar] [CrossRef]
- Carbonari, S.; Dezi, F.; Leoni, G. Linear soil-structure interaction of coupled wall-frame structures on pile foundations. Soil Dyn. Earthq. Eng. 2011, 31, 1296–1309. [Google Scholar] [CrossRef]
- TBEC-2018, (Turkish Building Earthquake Code). Specifications for Buildings to Be Built in Seismic Areas; Ministry of Public Works and Settlement: Ankara, Turkey, 2018.
- Kramer, S.L. Geotechnical Earthquake Engineering; Prentice-Hall: Englewood Cliffs, NJ, USA, 1996. [Google Scholar]
- Seismosoft. SeismoStruct 2016 Release-1—A Computer Program for Static and Dynamic Nonlinear Analysis of Framed Structures. Available online: http://www.seismosoft.com (accessed on 29 July 2017).
- The Calculation Values of Loads Used in Designing Structural Element; Turkish Standard, (TS498); Turkish Standard Institute: Ankara, Turkey, 1997.
- Finite Element Analysis and Design of Structures; Sap2000 CSI, Computers and Structures Inc: Berkeley, CA, USA, 1995.
- Velestos, A.S.; Prasad, A.M. Seismic interaction of structures and soils: Stochastic approach. J. Struct. Eng. ASCE 1989, 115, 935–956. [Google Scholar]
- Tabatabaiefar, S.H.R.; Fatahi, B.; Samali, B. Seismic Behavior of Building Frames Considering Dynamic Soil-Structure Interaction. Int. J. Géoméch. 2013, 13, 409–420. [Google Scholar] [CrossRef]
- Seed, H.B.; Idriss, I.M. Influence of Soil Conditions on Ground Motions During Earthquakes. J. Soil Mech. Found. Div. 1969, 95, 99–137. [Google Scholar] [CrossRef]
- Byrne, P.M.; Naesgaard, E.; Seid-Karbasi, M. Analysis and design of earth structures to resist seismic soil liquefaction. In Proceedings of the 59th Canadian Geotechnical Conf. and 7th Joint CGS/IAH-CNC Ground-Water Specialty Conf., Canadian Geotechnical Seciety, Richmond BC, Canada, 1–4 October 2006. [Google Scholar]
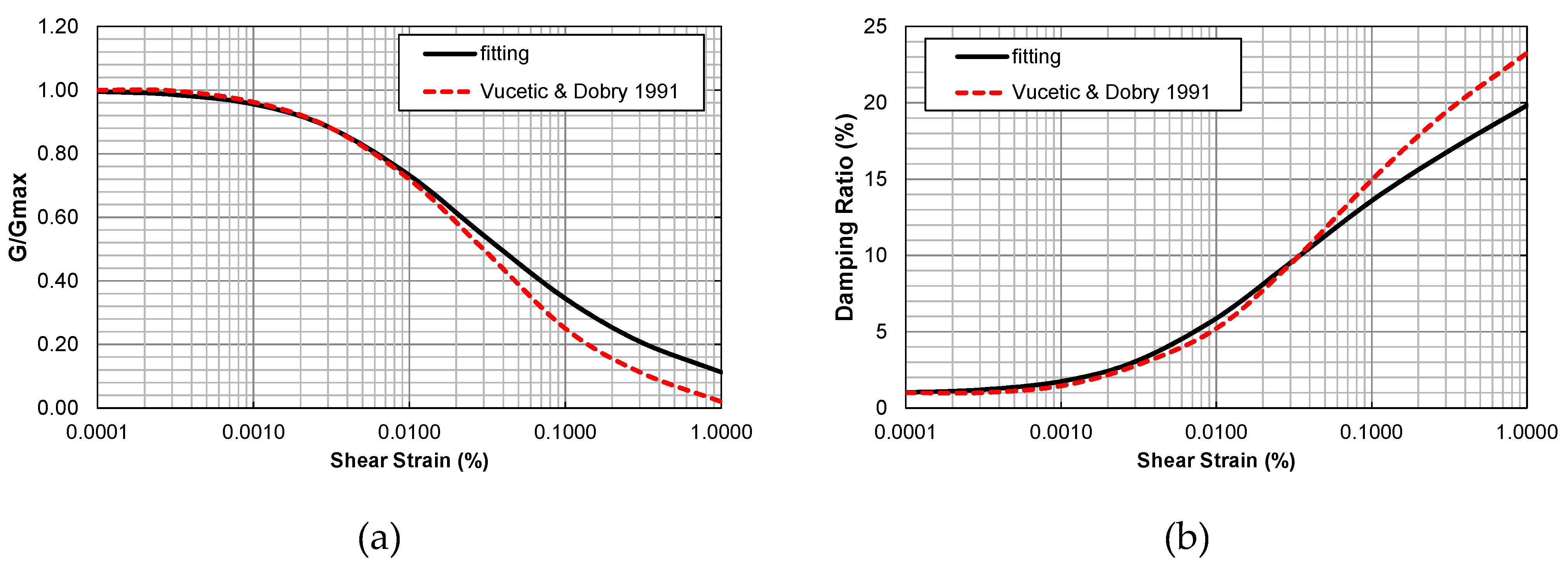
- Vucetic, M.; Dobry, R. Effect of Soil Plasticity on Cyclic Response. J. Geotech. Eng. 1991, 117, 89–107. [Google Scholar] [CrossRef]
- Hashash, Y.M.A.; Musgrove, M.I.; Harmon, J.A.; Ilhan, O.; Xing, G.; Numanoglu, O.; Groholski, D.R.; Phillips, C.A.; Park, D. DEEPSOIL, Version 7.0; Board of Trustees of Univ. of İllinois at Urbana-Champaign: Urbana, IL, USA, 2020. [Google Scholar]
- Scarfone, R.; Morigi, M.; Conti, R. Assessment of dynamic soil-structure interaction effects for tall buildings: A 3D numerical approach. Soil Dyn. Earthq. Eng. 2020, 128, 105864. [Google Scholar] [CrossRef]
- Kocak, S.; Mengi, Y. A Simple Soil-structure Interaction Model. Appl. Math. Model. 2000, 24, 607–635. [Google Scholar] [CrossRef]
- Dutta, C.H.; Roy, R. A Critical Review on Idealization and Modelling for Interaction among Soil–Foundation–Structure System. Comput. Struct. 2002, 80, 1579–1594. [Google Scholar] [CrossRef]
- Spyrakos, C.; Maniatakis, C.; Koutromanos, I. Soil–structure interaction effects on base-isolated buildings founded on soil stratum. Eng. Struct. 2009, 31, 729–737. [Google Scholar] [CrossRef]
- Zheng, J.; Takeda, T. Effects of soil-structure interaction on seismic response of PC cable-stayed bridge. Soil Dyn. Earthq. Eng. 1995, 14, 427–437. [Google Scholar] [CrossRef]
- Pitilakis, K.; Terzi, V. Experimental and Theoretical SFSI Studies in a Model Structure in Euroseistest. In Special Topics in Earthquake Geotechnical Engineering; Sakr, M., Ansal, A., Eds.; Springer: Dordrecht, The Netherlands, 2012; Volume 16, pp. 175–215. [Google Scholar] [CrossRef]
- Lachetl, C.; Bard, P.-Y. Numerical and Theoretical Investigations on the Possibilities and Limitations of Nakamura’s Technique. J. Phys. Earth 1994, 42, 377–397. [Google Scholar] [CrossRef]
- Delgado, J.; Lopez Casado, C.; Estevez, A.; Giner, J.; Cuenca, A.; Molina, S. Mapping soft soils in the Segura river walley (SE Spain): A case study of microtremors as an exploration tool. J. Appl. Geophys. 2000, 45, 19–32. [Google Scholar] [CrossRef]
- Kuhlemeyer, R.L.; Lysmer, J. Finite element method accuracy for wave propagation problems. J. Soil Mech. Found. Div. ASCE 1973, 99, 421–427. [Google Scholar] [CrossRef]
- Livaoglu, R.; Dogangun, A. Effect of foundation embedment on seismic behavior of elevated tanks considering fluid–structure-soil interaction. Soil Dyn. Earthq. Eng. 2007, 27, 855–863. [Google Scholar] [CrossRef]
- Livaoglu, R.; Cakir, T.; Dogangun, A.; Aytekin, M. Effects of back fill on seismic behavior of rectangular tanks. Ocean Eng. 2011, 38, 1161–1173. [Google Scholar] [CrossRef]
- Ghosh, S.; Wilson, E.L. Dynamic Stress Analysis of Axi-Symmetric Structures under Arbitrary Loading; University of California: Berkeley, CA, USA, 1969. [Google Scholar]
- Fahjan, Y.M. Selection and scaling of real earthquake accelerograms to fit the Turkish Design Spectra. Teknik Dergi 2008, 19, 4423–4444. [Google Scholar]
- PEER Ground Motion Database. Available online: https://ngawest2.berkeley.edu/ (accessed on 19 March 2011).
- Storn, R.; Price, K. Differential evolution a simple and efficient adaptive scheme for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Kamal, M.; Inel, M. Optimum design of reinforced concrete continuous foundation using differential evolution algorithm. Arab. J. Sci. Eng. 2019, 44, 8401–8415. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Parameter | Notation | Unit |
|---|---|---|---|
| Velocity | Root Mean Square of Velocity | Vrms | m/s |
| Velocity Spectrum Intensity | VSI | m | |
| Specific Energy Density | SED | m2/s | |
| Sustained Maximum Velocity | SMV | m/s | |
| Peak Ground Velocity | PGV | m/s | |
| Cumulative Absolute Velocity | CAV | m/s | |
| Housner Intensity | HI | m | |
| Freq. | Peak Velocity and Acceleration Ratio | Vmax/Amax | s |
| Mean Period | Tm | s | |
| Predominant Period | Tp | s | |
| Disp. | Peak Ground Displacement | PGD | m |
| Root Mean Square of Displacement | Drms | m | |
| Acceleration | Effective Design Acceleration | EDA | g |
| Arias Intensity | Ia | m/s | |
| Characteristic Intensity | Ic | - | |
| Acceleration Spectrum Intensity | ASI | g·s | |
| Root Mean Square of Acceleration | Arms | g | |
| Sustained Maximum Acceleration | SMA | g | |
| Peak Ground Acceleration | PGA | g | |
| A95 parameter | A95 | g |
| Column | Beam Size | 15-s | 13-s | 10-s | 8-s | 5-s | |
|---|---|---|---|---|---|---|---|
| Label | Size | Story Level | |||||
| C1 | 35 × 80 | 30 × 60 | from 1 to 5 | from 1 to 3 | - | - | - |
| C2 | 70 × 35 | ||||||
| C3 | 100 × 35 | ||||||
| C4 | 35 × 85 | ||||||
| C5 | 90 × 35 | ||||||
| C1 | 35 × 70 | 30 × 55 | from 6 to 10 | from 4 to 8 | from 1 to 5 | from 1 to 3 | - |
| C2 | 60 × 35 | ||||||
| C3 | 90 × 35 | ||||||
| C4 | 35 × 75 | ||||||
| C5 | 80 × 35 | ||||||
| C1 | 35 × 55 | 25 × 50 | from 11 to 15 | from 9 to 13 | from 6 to 10 | from 4 to 8 | from 1 to 5 |
| C2 | 50 × 35 | ||||||
| C3 | 70 × 35 | ||||||
| C4 | 35 × 60 | ||||||
| C5 | 60 × 35 | ||||||
| Model ID | Floor No | Period (s) | Seismic Weight (kN) | Base Shear/Seismic Weight |
|---|---|---|---|---|
| 5s | 5 | 0.75 | 22404 | 0.159 |
| 8s | 8 | 1.12 | 36733 | 0.103 |
| 10s | 10 | 1.39 | 46286 | 0.082 |
| 13s | 13 | 1.73 | 60926 | 0.064 |
| 15s | 15 | 1.95 | 70678 | 0.058 |
| Layer No. | Depth (m) | Vs (m/s) | v | Cu (kPa) | ρ (kN/m3) |
|---|---|---|---|---|---|
| 1 | 0–10 | 184 | 0.35 | 148 | 18.99 |
| 2 | 10–25 | 205 | 0.35 | 206 | 21.36 |
| 3 | 25–45 | 256 | 0.35 | 365 | 24.22 |
| Soil Classification (TBEC-2018) | Shear Wave Velocity (m/s) | Magnitude (Mw) | PGA (g) | Source Distance (km) |
|---|---|---|---|---|
| ZD | 180–360 | 4.5–7.5 | ≥0.1 | 5–50 |
| SDS (g) | SD1 (g) | 0.4SDS (g) | TA (s) | TB (s) |
| 1.15 | 0.521 | 0.46 | 0.09 | 0.45 |
| Record No. | Earthquake | Mw | Vs30 (m/s) | Scale |
|---|---|---|---|---|
| RSN-3935 | Tottori, Japan | 6.61 | 344 | 1.7786 |
| RSN-165 | Imperial Valley-06 | 6.53 | 242 | 1.8544 |
| RSN-5805 | Iwate, Japan | 6.9 | 253 | 1.8600 |
| RSN-8606 | El Mayor-Cucapah, Mexico | 7.2 | 242 | 1.4823 |
| RSN-1615 | Duzce, Turkey | 7.14 | 338 | 1.7878 |
| RSN-5829 | El Mayor-Cucapah, Mexico | 7.2 | 242 | 1.9498 |
| RSN-5825 | El Mayor-Cucapah, Mexico | 7.2 | 242 | 1.8929 |
| RSN-5619 | Iwate, Japan | 6.9 | 279 | 1.9229 |
| RSN-1082 | Northridge-01 | 6.69 | 321 | 1.5847 |
| RSN-4889 | Chuetsu-oki, Japan | 6.8 | 315 | 1.8487 |
| RSN-6893 | Darfield, New Zealand | 7.0 | 344 | 1.8912 |
| Record | 15-s | 13-s | 10-s | 8-s | 5-s | Average of All Models |
|---|---|---|---|---|---|---|
| RSN1082-h1 | 0.66 | 0.56 | 0.76 | 0.90 | 0.80 | 0.74 |
| RSN1082-h2 | 0.56 | 0.55 | 0.97 | 1.07 | 1.44 | 0.92 |
| RSN1615-h1 | - | - | - | - | - | - |
| RSN1615-h2 | 0.27 | 0.31 | 0.51 | 0.56 | 0.34 | 0.39 |
| RSN165-h1 | 0.53 | 0.54 | 0.47 | 0.55 | 0.76 | 0.57 |
| RSN165-h2 | 0.81 | 0.65 | 1.03 | 1.36 | 1.68 | 1.11 |
| RSN3935-h1 | 0.15 | 0.19 | 0.17 | 0.13 | 0.10 | 0.15 |
| RSN3935-h2 | 0.08 | 0.09 | 0.11 | 0.07 | 0.06 | 0.08 |
| RSN4889-h1 | 0.37 | 0.36 | 0.33 | 0.26 | 0.43 | 0.35 |
| RSN4889-h2 | 0.43 | 0.30 | 0.53 | 0.47 | 0.53 | 0.45 |
| RSN5619-h1 | 0.89 | 0.86 | 0.87 | 0.98 | 0.81 | 0.88 |
| RSN5619-h2 | 0.57 | 0.59 | 0.53 | 0.45 | 0.53 | 0.53 |
| RSN5805-h1 | 0.54 | 0.51 | 0.48 | 0.43 | 0.36 | 0.46 |
| RSN5805-h2 | 0.40 | 0.37 | 0.68 | 0.45 | 0.38 | 0.45 |
| RSN5825-h1 | 2.43 | 1.96 | 1.69 | 1.57 | 1.49 | 1.83 |
| RSN5825-h2 | 1.78 | 1.03 | 1.01 | 1.24 | 1.05 | 1.22 |
| RSN5829-h1 | 1.17 | 1.11 | 0.93 | 0.87 | 2.04 | 1.23 |
| RSN5829-h2 | 0.73 | 0.86 | 0.82 | 0.92 | 1.11 | 0.89 |
| RSN6893-h1 | 1.16 | 0.89 | 0.92 | 0.85 | 1.36 | 1.04 |
| RSN6893-h2 | 0.55 | 0.52 | 0.55 | 0.73 | 0.80 | 0.63 |
| RSN8606-h1 | 1.02 | 0.65 | 0.60 | 0.76 | 0.94 | 0.79 |
| RSN8606-h2 | 1.29 | 1.31 | 1.56 | 1.72 | 1.62 | 1.50 |
| Max. | 2.43 | 1.95 | 1.69 | 1.72 | 2.04 | 1.83 |
| Min. | 0.08 | 0.09 | 0.11 | 0.07 | 0.06 | 0.08 |
| Average | 0.78 | 0.68 | 0.74 | 0.78 | 0.89 | 0.77 |
| Type | Parameter | 15-s | 13-s | 10-s | 8-s | 5-s | All Models |
|---|---|---|---|---|---|---|---|
| Velocity | HI | 0.798 | 0.81 | 0.856 | 0.874 | 0.923 | 0.914 |
| Vrms | 0.865 | 0.861 | 0.814 | 0.846 | 0.823 | 0.895 | |
| VSI | 0.741 | 0.755 | 0.795 | 0.826 | 0.902 | 0.864 | |
| SED | 0.865 | 0.872 | 0.712 | 0.728 | 0.718 | 0.821 | |
| SMV | 0.716 | 0.737 | 0.612 | 0.670 | 0.684 | 0.744 | |
| PGV | 0.679 | 0.652 | 0.590 | 0.610 | 0.765 | 0.713 | |
| CAV | 0.448 | 0.515 | 0.267 | 0.260 | 0.348 | 0.418 | |
| Freq. | Vmax/Amax | 0.594 | 0.517 | 0.555 | 0.503 | 0.448 | 0.551 |
| Tm | 0.490 | 0.430 | 0.560 | 0.521 | 0.439 | 0.515 | |
| Tp | 0.012 | 0.031 | 0.035 | 0.043 | 0.026 | 0.210 | |
| Disp. | PGD | 0.283 | 0.288 | 0.294 | 0.378 | 0.464 | 0.356 |
| Drms | 0.118 | 0.130 | 0.132 | 0.185 | 0.306 | 0.170 | |
| Acceleration | EDA | 0.009 | 0.012 | 0.013 | 0.033 | 0.120 | 0.270 |
| Ia | 0.272 | 0.297 | 0.143 | 0.151 | 0.289 | 0.260 | |
| Ic | 0.185 | 0.227 | 0.118 | 0.148 | 0.275 | 0.216 | |
| ASI | 0.066 | 0.106 | 0.070 | 0.128 | 0.248 | 0.126 | |
| Arms | 0.03 | 0.062 | 0.053 | 0.087 | 0.199 | 0.099 | |
| SMA | 0.058 | 0.059 | 0.079 | 0.152 | 0.16 | 0.089 | |
| PGA | 0.036 | 0.034 | 0.043 | 0.062 | 0.128 | 0.057 | |
| A95 | 0.034 | 0.031 | 0.042 | 0.061 | 0.124 | 0.053 |
| HI | Vrms | VSI | SED | PGV | SMV | |
|---|---|---|---|---|---|---|
| Max. | 1.42 | 1.77 | 1.68 | 1.59 | 2.52 | 2.81 |
| Min. | 0.67 | 0.62 | 0.57 | 0.64 | 0.45 | 0.61 |
| St. Dev. | 0.21 | 0.25 | 0.27 | 0.32 | 0.45 | 0.56 |
| Mean | 1.02 | 1.03 | 1.04 | 1.05 | 1.08 | 1.17 |
| CoV | 0.21 | 0.24 | 0.26 | 0.31 | 0.41 | 0.48 |
| Minimum | Maximum | Mean | R2 | CoV | CoV (Ei or Pi)/(E3) | ||
|---|---|---|---|---|---|---|---|
| Proposed Equations | E3 | 0.68 | 1.26 | 1.01 | 0.95 | 0.17 | 1.00 |
| E1 | 0.69 | 1.43 | 1.05 | 0.94 | 0.18 | 1.06 | |
| E2 | 0.58 | 1.26 | 1.00 | 0.94 | 0.20 | 1.18 | |
| E4 | 0.61 | 1.40 | 1.02 | 0.93 | 0.18 | 1.06 | |
| E5 | 0.60 | 1.78 | 1.03 | 0.90 | 0.24 | 1.41 | |
| Parameters | HI | 0.67 | 1.43 | 1.02 | 0.91 | 0.21 | 1.24 |
| Vrms | 0.62 | 1.77 | 1.03 | 0.89 | 0.24 | 1.41 | |
| VSI | 0.65 | 1.59 | 1.04 | 0.86 | 0.26 | 1.53 | |
| SED | 0.57 | 1.68 | 1.05 | 0.82 | 0.31 | 1.82 | |
| PGV | 0.45 | 2.52 | 1.08 | 0.74 | 0.41 | 2.41 | |
| SMV | 0.61 | 2.81 | 1.17 | 0.71 | 0.48 | 2.82 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kamal, M.; Inel, M. Correlation between Ground Motion Parameters and Displacement Demands of Mid-Rise RC Buildings on Soft Soils Considering Soil-Structure-Interaction. Buildings 2021, 11, 125. https://doi.org/10.3390/buildings11030125
Kamal M, Inel M. Correlation between Ground Motion Parameters and Displacement Demands of Mid-Rise RC Buildings on Soft Soils Considering Soil-Structure-Interaction. Buildings. 2021; 11(3):125. https://doi.org/10.3390/buildings11030125
Chicago/Turabian StyleKamal, Muhammet, and Mehmet Inel. 2021. "Correlation between Ground Motion Parameters and Displacement Demands of Mid-Rise RC Buildings on Soft Soils Considering Soil-Structure-Interaction" Buildings 11, no. 3: 125. https://doi.org/10.3390/buildings11030125
APA StyleKamal, M., & Inel, M. (2021). Correlation between Ground Motion Parameters and Displacement Demands of Mid-Rise RC Buildings on Soft Soils Considering Soil-Structure-Interaction. Buildings, 11(3), 125. https://doi.org/10.3390/buildings11030125