Abstract
An asymmetric-coupling decentralized control framework is developed using a Lyapunov-like lemma to achieve synchronization and trajectory tracking among multiple robots. Multiple robots are treated as a single integrated system when employing a Lyapunov-based strategy to design the asymmetric coupled control system. The challenge of verifying the negative semi-definiteness of the Lyapunov function’s time derivative, due to the inclusion of asymmetric coupling terms from the controllers, is addressed through grouping and factorization techniques. The benefits of asymmetric coupling control are demonstrated in comparison to two-way coupling control. Two, three, and four robots are studied, respectively. In graph theory, several control-coupling topologies exist for networked robots. A family of coupling topologies for the four-robot system is compared and ranked in terms of the joint convergence speed and servo gains. Numerical simulations and comparisons are conducted to verify the theoretical results.
1. Introduction
From a mathematical perspective, the control of multiple robots constitutes a problem involving coupled nonlinear differential equations. While controlling a single robot to perform a task, such as tracking a desired trajectory, is relatively straightforward, coordinating multiple robots to achieve both synchronization and trajectory tracking is significantly more complex due to the coupling interactions among the robots [1,2]. This challenge is closely related to the field of decentralized control in multi-agent systems.
There are many studies on the decentralized and distributed coordinated control of multi-agent systems [3,4,5,6,7]. For example, in [8], the algebraic graph theory and Nyquist diagram are used to conduct the control design for the formation of multi-agent systems, the systems are treated as particles, and the connections between particles are treated as a linear system. In [9], a decentralized synchronization concept is proposed for up to ten robots in terms of scalability based on 5G and cloud computing for communication between the robots. However, the control strategy and its stability are not explicitly illustrated. In [10,11], the Udwadia–Kalaba approach is used for synchronization and distributed consensus control design for networked mobile carts. However, the Udwadia–Kalaba method is primarily used for constrained systems (i.e., the initial conditions are not known or cannot be arbitrarily assigned) and has limited applicability. Robotic manipulators are typically unconstrained systems in terms of initial conditions. Additionally, the designed controller is a two-way coupled control system, which could increase the servo feedback gains. High feedback gains are not ideal for human–robot interaction situations. Furthermore, mobile carts are significantly different from robotic manipulators, which are highly nonlinear. Recently, there has been development in event-triggered control systems and adaptive methods in multi-agent synchronization for multiple robots [12,13,14,15,16]. For example, in [17], a distributed event-triggered control is developed for multi-robot cooperation instead of multi-robot synchronization. The designed control framework does not rely on global information, and similarly, in [18,19,20,21] an event-triggered decentralized control system is developed for multi-robot cooperative tasks. In [22], a decentralized coordinated control system is developed based on a Lyapunov-like lemma for multiple robot arms grasping a common object and conducting trajectory tracking. The controller designed above essentially is a set of independent controllers using a reference error signal between the state of each robot and the desired state, without coupling between them. As a result, the robot system can deviate from the desired trajectory if it is subject to external disturbances. In [23], a cooperative control system is designed for multiple agents with linear dynamics based on distributed optimization. The proposed technique is limited to linear dynamics, whereas robotic manipulators are highly nonlinear.
The objective of this paper is to design an asymmetrically coupled control system for each robot within a highly nonlinear multi-robot system, enabling both synchronization and trajectory tracking. The coupled control design is related to the decentralized and distributed coordinated control of multi-agent systems in that here we are designing the controller for every single robot so that they achieve synchronization and then track the desired trajectory, rather than focusing on the coordination and formation of multiple robots.
Several studies have focused on bidirectional or two-way coupling [24,25,26,27,28,29,30,31,32] in multiple robots. The potential problem with two-way coupling is that it requires high servo feedback gains to achieve synchronization and trajectory tracking, which can make the robot stiffer and therefore unsafe in a human–robot interaction environment [33,34,35,36,37]. We refer to asymmetric coupling (i.e., one-way coupling) when robot one gives information to robot two but does not receive information from robot two. In other words, robot one is the leader, and robot two is the follower. Several studies [38,39,40,41,42,43] have been conducted on the leader–follower trajectory tracking problem, mostly focusing on first-order systems rather than on synchronization and trajectory simultaneously. For example, in [38], the authors studied the stabilization of a formation for a group of vehicles using contraction theory, but the model is not two-dimensional, unlike the two-link robotic manipulator. Also, it does not focus on the synchronization and trajectory tracking problem simultaneously. In [39], the perturbation method is used to design the synchronization controller for a network of wave PDEs. In [40], the authors conducted a control design for the synchronization of a leader–follower network of a second-order system, but only focused on the synchronization problem. Not many studies on the one-way coupling control of multiple-robot systems can be found. One remarkable work in [44] derived a control system for multiple robots to both synchronize and track a desired trajectory, which is a simplified version of the control law proposed in [45]. It shows that it is possible that robots synchronize but do not follow the desired trajectory. However, the coupling term in the control law involves two-way ring coupling.
Inspired by the studies above, this paper focuses on the asymmetric coupling (i.e., one-way coupling) control design for multiple robots’ synchronization and trajectory tracking. It demonstrates the features and advantages of such an asymmetric approach compared to existing works in terms of joint convergent speed and servo gain strength. In comparison to two-way coupling, with identical physical parameters, initial conditions, and servo gains for robots, symmetric coupling control shows that the robots do not track the desired trajectory, even when they exhibit synchronization behavior. Furthermore, a high servo feedback gain is required for two robots to both synchronize and track the desired trajectory using existing symmetric coupling control. The advantage of having a low feedback gain, for example, during robotic manipulation, is that it places the robot in joint impedance mode, making it capable of exploring the actual position and contour of the object being manipulated. This enables the robot to accomplish the task even if the trajectories being programmed are not tracked exactly. Numerous studies have suggested that high servo gain can make robots stiffer, and therefore, it is not ideal for robots to work in a human–robot interaction environment [34,35,36,37]. For example, when robots accidentally come into physical contact with a human operator, the contact must be soft and compliant enough to avoid causing injury. Similarly, in robotic arm manipulation, during trajectory-tracking motion, the robot’s joint trajectory often deviates from the desired path due to modeling errors. When the joints are set to a high-stiffness mode, the system becomes less flexible, making it harder to adapt to the actual contour and trajectories of the object being manipulated [46,47]. Two, three, and four robotic manipulators are used, respectively.
Based on graph theory, there is a family of control coupling topologies, and we will investigate each coupling topology and come up with the best coupling option in terms of robot convergent speed and safety factors. In the case of two-robot systems, only one coupling topology exists. For three-robot systems, there are two possible topologies: tree coupling and fully connected coupling. When extended to four-robot systems, nine distinct coupling topologies emerge. Each of these topologies will be analyzed and compared, and a ranking will be established based on joint convergence speed and servo gain strength.
The contributions of this paper are as follows: (1) An asymmetric coupling control framework is developed for multiple robots’ synchronization and trajectory tracking, using a Lyapunov-like lemma to treat multiple robots as one whole system. The proposed method offers several advantages, as follows: it ensures synchronization even when robots have different initial conditions or physical parameters, and it remains robust against external disturbances. Moreover, it allows for simultaneous proof of both synchronization and trajectory tracking, along with the derivation of their respective conditions. Importantly, without compromising synchronization or tracking performance, the proposed asymmetric coupling control framework enables the use of lower servo feedback gains compared to traditional two-way coupling control, allowing the robot to operate in joint impedance mode. This is particularly beneficial in physical interaction scenarios, such as human–robot interaction or robotic manipulation [37,46]. (2) A family of control coupling topologies derived from graph theory is discussed and compared, and sufficient conditions in terms of servo gain and coupling gain are derived for the robots to synchronize and track the desired trajectory under each coupling topology. The novelty of this work lies in the fact that we treat all robots as one single system when using a Lyapunov-based strategy to design the asymmetric coupled control systems. If we treat every single robot separately, achieving synchronization of all robots is generally impossible unless all robots have the same initial conditions, same physical parameters, and same trajectory tracking control algorithm without external disturbances. The technical advantages of this paradigm, treating all robots as a single integrated system, are that synchronization behavior can be guaranteed even if the robots have different initial conditions or even with different physical parameters, and they are immune to external disturbances. Furthermore, the benefit of the proposed method is that we can simultaneously prove the synchronization and trajectory tracking of the robots and derive the synchronization and trajectory-tracking conditions, instead of treating them separately. On the other hand, a key challenge in applying a Lyapunov-like lemma to the asymmetric coupled control design of multiple robots lies in the presence of coupling or interaction terms between individual controllers, each tailored to a specific robot, resulting from the embedded asymmetric coupling mechanism within the Lyapunov function. When we calculate (i.e., Lyapunov function derivative), two-way coupling control cancels out most of the terms in , which makes the problem easy. However, this comes at the cost of increased servo gains. When embedding the asymmetric coupling mechanism in the Lyapunov function, the asymmetric coupled controller complicates the calculation of compared to the two-way coupled controller, and to ensure that it stays negative, a certain condition in terms of servo feedback gains and coupling gains must be satisfied, which is one of the main results this paper will derive. The challenge of verifying the negative semi-definiteness of , arising from the asymmetric coupling terms in the controllers, will be addressed through the addition and subtraction of carefully chosen terms, followed by factorization.
Compared with some existing multi-robot synchronization approaches based on two-way coupling [24,25,26,27,28,29], this study differs in the following aspects. Firstly, all robots are considered as one integrated system in the Lyapunov analysis, which enables simultaneous proof of synchronization and trajectory tracking. Secondly, an asymmetric coupling approach is presented that allows for lower feedback gains while maintaining stability performance, which is not attainable through the traditional symmetric coupling approach. Finally, the synchronization and tracking conditions are derived for a family of graph-based coupling topologies under different robot parameters and external disturbances.
The organization of this paper is as follows. The proposed asymmetric coupling control framework and its design for two robots and three robots are presented in Section 2. All control coupling topologies derived from graph theory are discussed for the four-robot system in Section 3. Section 4 provides a comparison between the proposed asymmetric coupling control and the two-way coupling control approach that exists in the literature. The numerical simulation and comparison for two-robot, three-robot, and four-robot systems under asymmetric coupling control and two-way coupling control are provided in Section 5.
2. Asymmetric Coupling Control Framework
The proposed synchronization control law contains asymmetric coupling terms. To address the coupling phenomena among the robots, prove the stability of the proposed controller, and ensure that the robots achieve both synchronization and trajectory tracking, we model the multiple robots as a single integrated system rather than designing controllers individually for each robot. In [44], the contraction analysis tool is used to prove the tracking and synchronization performance of the two-way ring-coupling control law. Our proposed methodology is an alternative approach to proving control stability, synchronization, and trajectory tracking performance. The advantage of the proposed method is that we can prove the synchronization and trajectory tracking of robots simultaneously and derive synchronization and trajectory-tracking conditions simultaneously, instead of treating them separately, as done in [44]. Also, the proposed approach applies not only to identical robots but also to nonidentical robots.
2.1. Two-Robot System
The robot considered is a two-link manipulator. Each robot consists of two links and two joints, and it is fully actuated. For the two-robot system, tree coupling is the same as fully connected coupling. For the two-robot system as shown in (1), the goal is to design the control inputs and , such that both robots synchronize and track the desired trajectory.
where () is the mass matrix of the ith robot, and its dimension is two by two, as it is a two-link robotic manipulator. represents the centrifugal and Coriolis term, and its dimension is also two by two. is the gravitational term, and its dimension is two by one. , , and are all state-dependent. is the control input we need to design, and its dimensions are two by one. u1 and u2 should be coupled to achieve synchronization. The mass matrix of the robot is a function of the joint angles. As the two robots might have different initial conditions, their mass matrix will differ. We use and to represent the mass matrix of the first robot and the second robot, respectively, and generally, , even though the two robots are identical. The same applies to the terms and . The proposed asymmetric coupling controller is shown in Equation (2). As shown in Figure 1a, we use the one-way arrow to represent robot 2 giving information (i.e., its joint position and velocity) to robot 1. Robot 2 does not receive information from robot 1.
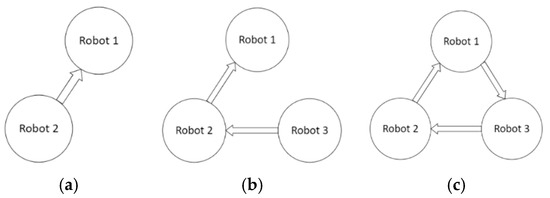
Figure 1.
Asymmetric coupling. (a) Tree/fully connected coupling. (b) Tree coupling. (c) Fully connected coupling.
Theorem 1.
where and are the gain matrices. The scalar and are the gains of the servo control law portion and the coupling gain between the robots, respectively.
Two identical robotic manipulators will both synchronize and track the desired trajectory using the proposed asymmetric coupling control law shown below if .
Proof.
To handle the coupling phenomena among the robots’ control, a common Lyapunov function for the two identical robots as one whole system is
where n = 2. Taking the time derivative of and using the fact that is skew-symmetric, we have
where , , , and . are the joint angles of the ith robot, and is the desired trajectory that we want the robots to follow. As and , where is the identity matrix, the control system in Theorem 1 can be rewritten as follows:
where is the asymmetric coupling term. Substituting the controllers from Equation (4) into we have
By grouping and factorization, is rewritten as
From Equation (6), when , . Based on Barbalat’s lemma [48], as time approaches infinity (. Based on the structure of Equation (6), the only place that makes is tends to 0 and tends to 0 (), which indicates that , , and , . This means the two robots track the desired trajectory and, in the meantime, synchronize. Note that is a sufficient condition for all robots to have synchronization and trajectory tracking. □
Lemma 1.
If , two robots will synchronize but not necessarily track the desired trajectory.
Proof.
If , in Equation (5) can be rewritten as
Based on Barbalat’s lemma, as , which further indicates that approaches (), but not necessarily tends to 0, which indicates that two robots will synchronize, but not necessarily track the desired trajectory. □
Lemma 2.
Using the asymmetric coupling controller proposed in Theorem 1, the two non-identical robots will still both track the desired trajectory and synchronize if .
Proof.
Same process as before because the term cancel its own dynamics in Equation (3). □
The benefit of this common Lyapunov analysis method, which treats two robots as one system, is that we proved the synchronization and trajectory tracking of the robots simultaneously and derived the synchronization and trajectory-tracking conditions simultaneously, instead of treating them separately, as done in [44]. Also, the approach proposed here applies not only to identical robots but also to non-identical robots. The reason is that each controller for its robot cancels out its own dynamics, i.e., the terms and in the control law in Equation (4) use their own state feedback to cancel out their own dynamics, as shown in Equation (3), even if the two robots are non-identical. The controller designed here is a decentralized control system in which each controller controls its own robot, and there exists coupling between each controller.
2.2. Three-Robot System
Tree coupling: The tree coupling approach is shown in Figure 1b. The proposed controller corresponding to the tree coupling is illustrated in Equation (7), and this is an asymmetric coupling control. Robot 3 is the leader; robot 3 passes information (its joint position and velocity) to robot 2, and robot 2 passes information to robot 1.
where , , and represent the state of the ith robot, and represents the desired state.
Theorem 2.
Using the asymmetric tree coupling controller proposed in (7), three identical robots both synchronize and track the desired trajectory if .
Proof.
The Lyapunov function for three identical robots as one system is the case when n = 3 in Equation (2), and by taking its time derivative,
where , . Substituting controllers into , we have
Grouping and factorization result in
Based on Barbalat’s lemma, if , as . As is a negative summation of the squared, indicates that , i.e., three robots both synchronize and track the desired trajectory. If , then becomes . That is, as , which means three robots synchronize and track the desired trajectory. Overall, is the condition for three robots to synchronize and track the desired trajectory. □
Lemma 3.
Using the asymmetric tree coupling controller proposed in (7), three non-identical robots still both synchronize and track the desired trajectory if .
Proof.
Same process as before, because the terms , , and cancel their own dynamics. □
Fully connected coupling: The fully connected coupling control is shown in Figure 1c. It has a cyclic or ring topology. The proposed controller corresponding to the fully connected coupling is
Theorem 3.
Using the asymmetric fully connected coupling controller proposed in (11), three identical robots will both synchronize and track the desired trajectory if .
Proof.
Noted that if we add the term in for tree coupling, then it becomes fully connected coupling. The procedure is the same as we followed for tree coupling, the only difference being that in , there will be an extra term, , which results in
From Equation (12), is the condition for . As is a negative summation of the squared, indicates that , i.e., three robots both synchronize and track the desired trajectory. □
Lemma 4.
If , then three robots synchronize without the guarantee that trajectory tracking will be achieved.
Proof.
If , . Based on Barbalat’s lemma, as , which means , but not necessarily tending to 0. □
From the above, we can see that tree coupling is slightly better than fully connected coupling in terms of the value of gain as is required for three robots to both become synchronized and track the desired trajectory under tree coupling, whereas is required for fully connected coupling.
3. Four-Robot System
There are several coupling topologies for the four-robot system, and based on graph theory, we can categorize them into the following [49]: tree coupling, pruning coupling, DeVille/ring coupling, Macaulay2 coupling, and fully connected coupling. For each category, there are also a few possibilities. We will discuss all coupling possibilities, derive the synchronization and trajectory tracking conditions for each of the coupling scenarios, and compare each one of them.
Tree coupling: In tree coupling, one robot is the leader, and it gives information (i.e., joint position and velocity) to the rest of the robots. It has a hierarchical control system structure. As shown in Figure 2a, robot 4 is the leader, and it passes information to robot 1, robot 2, and robot 3, but there is no direct connection among robot 1, robot 2, and robot 3. The proposed asymmetric coupling control system corresponding to the tree coupling is
where , , i = 1, 2, 3, 4.
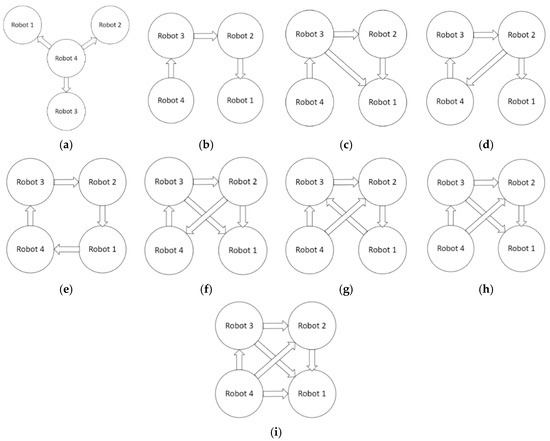
Figure 2.
Four robots’ asymmetric coupling possibilities: (a) tree coupling; (b) first pruning coupling scenario; (c) second pruning coupling scenario; (d) third pruning coupling scenario; (e) DeVille/ring coupling; (f) first Macaulay2 coupling scenario; (g) second Macaulay2 coupling scenario; (h) third Macaulay2 coupling scenario; (i) fully connected coupling.
Theorem 4.
Using the asymmetric tree coupling controller proposed in (13), four identical robots will both synchronize and track the desired trajectory if .
Proof.
The Lyapunov function for four identical robots as one system is the case when n = 4 in Equation (2). Taking its time derivative,
where . Substituting controllers , , and into , we have
Grouping and factorization result in
We see that is the condition for . If , as . As is a negative summation of the squared, indicates that each term must be zero, which means four robots both synchronize and track the desired trajectory. □
Lemma 5.
Using the asymmetric tree coupling controller proposed in (13), four non-identical robots will still both track the desired trajectory and synchronize if
.
Proof.
Same process because the terms , , , and cancel their own dynamics in Equation (14). □
Pruning coupling: Pruning coupling is like tree coupling, as shown in Figure 2b. Robot 4 is the leader, and it gives information to robot 3, robot 3 passes the information to robot 2, and robot 2 passes the information to robot 1. Note that this is not ring coupling unless there is a direct connection between robot 4 and robot 1. The proposed asymmetric coupling control corresponding to the pruning coupling is
Theorem 5.
Using the asymmetric pruning coupling controller proposed in (17), four identical robots will both track the desired trajectory and synchronize if .
Proof.
The same Lyapunov function and the same as before. If we substitute the controllers , , and from Equation (17) into , we have, after grouping and factorization,
Based on Barbalat’s lemma, if , as . indicates that each term must be zero, which means , i.e., four robots both synchronize and track the desired trajectory. □
Lemma 6.
If
, then four robots still both synchronize and track the desired trajectory.
Proof.
If , becomes . Based on Barbalat’s lemma, as , which means four robots synchronize, and trajectory tracking is also performed. □
Note that for pruning coupling, the last four terms in are
whereas for tree coupling, they are
We see that is required for robots to become synchronized and track trajectories under pruning coupling, and is required for tree coupling. Tree coupling makes robots synchronize and get on the desired trajectory faster than pruning coupling, as shown in Section 5.
A second pruning coupling scenario is shown in Figure 2c. Robot 4 is the leader. Robot 4 passes information to robot 3, robot 3 passes information to robots 1 and 2, and robot 2 passes information to robot 1. The difference between the second scenario and the first scenario is that robot 3 also passes information to robot 1 in the second scenario. The second pruning coupling scenario is not symmetric, and intuitively, this coupling is not very interesting or common in nature because, from a biological (e.g., bird flocking) perspective, each agent should be evenly connected to others. The proposed controller corresponding to the second pruning coupling scenario is
Theorem 6.
Using the asymmetric pruning coupling (2nd scenario) controller proposed in (19), four identical robots will both track the desired trajectory and synchronize if .
Proof.
The same procedure as above. The only difference is that there is one extra term, in :
If , as . indicates that each term must be zero, which means , i.e., four robots synchronize and track the desired trajectory. □
A third pruning coupling scenario is shown in Figure 2d. Robot 4 gives information to robot 3, robot 3 passes information to robot 2, and robot 2 passes information to robot 1 and passes information back to robot 4. Noticed that there is no leader in this case. The corresponding control that represents the third pruning coupling scenario is as follows:
Theorem 7.
Using the asymmetric pruning coupling (3rd scenario) proposed in (21), four identical robots will both track the desired trajectory and synchronize if .
Proof.
Using the same procedure results in
If , as . indicates that each term must be zero, which means , i.e., four robots both synchronize and track the desired trajectory. □
The last two cases have the same result, i.e., . However, computer simulation in Section 5 will show that the robots take a longer time to synchronize and track the desired trajectory under pruning coupling (3rd scenario).
DeVille/ring coupling: DeVille/ring coupling is shown in Figure 2e. Robot 1 gives information to robot 2, robot 2 passes information to robot 3, robot 3 passes information to robot 4, and robot 4 passes information back to robot 1. Note that if we remove the direct connection between robot 4 and robot 1, then it becomes pruning coupling. Also in this coupling scenario, there is no leader. The corresponding control that represents DeVille/ring coupling is as follows.
Theorem 8.
Using the asymmetric ring coupling controller proposed in (23), four identical robots will both track the desired trajectory and synchronize if .
Proof.
The same procedure results in
If , as indicates that , i.e., four robots synchronize and track the desired trajectory. □
Lemma 7.
If
, then four robots synchronize without the guarantee that trajectory tracking will be performed.
Proof.
If , . Based on Barbalat’s lemma, as , which means , but they do not necessarily tend to 0, i.e., four robots synchronize without the guarantee that trajectory tracking is achieved. □
Note that this average, , is very high, so it will take a longer time to track the desired trajectory compared to pruning coupling, which will be seen in Section 5.
Macaulay2 coupling: Macaulay2 coupling is shown in Figure 2f, where there is no leader, and robot 4 gives information to robot 3, robot 3 passes information to both robots 1 and 2, and robot 2 passes information to both robots 4 and 1. The corresponding control for the Macaulay2 coupling structure is as follows:
Theorem 9.
Using the Macaulay2 coupling controller proposed in (25), four identical robots will both track the desired trajectory and synchronize if .
Proof.
For the Macaulay2 coupling case, .
It shows that is the condition for . If , as , i.e., four robots both synchronize and track the desired trajectory. □
Compared to pruning coupling (3rd scenario), it has the same result, i.e., , for robots to synchronize and track the desired trajectory. However, as we will see from Section 4, Macaulay2 coupling takes a slightly longer time for robots to become synchronized and track the desired trajectory because the average, , is higher than the pruning one, .
A second possibility for Macaulay2 coupling is shown in Figure 2g, where robot 4 is the leader, and it gives information to both robots 3 and 2, and robot 3 passes information to robot 2, robot 2 passes information to robot 1, and robot 1 passes information to robot 3. The corresponding control for the second possibility of Macaulay2 coupling is as follows:
Theorem 10.
Using control that corresponds to the second possibility of Macaulay2 coupling proposed in (26), four identical robots will both track the desired trajectory and synchronize if .
Proof.
Using the same procedure as before yields .
If , as . As is a negative summation of the squared, indicates that , i.e., four robots both synchronize and track the desired trajectory. □
This possibility has the same result as the previous one, which means these two different couplings generate the same results in terms of synchronization and trajectory tracking time, as we will see in Section 5.
The third possibility of the Macaulay2 coupling is shown in Figure 2h, where robot 4 is the leader, and it gives information to both robots 2 and 3, robot 3 passes information to both robots 2 and 4, and robot 2 passes information to robot 1. The corresponding control for the third possibility of Macaulay2 coupling is as follows:
Theorem 11.
Using the control corresponding to the third possibility of Macaulay2 coupling proposed in (27), four identical robots will both track the desired trajectory and synchronize if .
Proof.
Equation (28) suggests that is the condition for . So, if , four robots both synchronize and track the desired trajectory. □
This possibility has the same as the previous possibility; however, in Section 5, we will see that robots get on the desired trajectory faster than in the previous two cases.
Fully connected coupling: The fully connected coupling is shown in Figure 2i, where robot 4 is the leader, and it gives information to robots 1, 2, and 3, robot 3 passes information to robots 2 and 1, and robot 1 passes information to robot 1. The corresponding control for the fully connected coupling is
Theorem 12.
Using the fully connected coupling controller proposed in (29), four identical robots will both track the desired trajectory and synchronize if .
Proof.
Equation (30) indicates that is the condition for four robots to both synchronize and track the desired trajectory. □
Lemma 8.
If
, then four robots synchronize without the guarantee that trajectory tracking will be performed.
Proof.
If , . Based on Barbalat’s lemma, as , which means , but they do not necessarily tend to 0, i.e., four robots synchronize, but there is no guarantee that trajectory tracking will be performed. □
In Section 5, we will compare and rank all coupling possibilities discussed above. As shown in Table 1, pruning coupling (1st possibility) is the best in terms of coupling strength. Pruning coupling requires for all four robots to synchronize and track the desired trajectory, but all the other coupling scenarios require for robots to become synchronized and track the desired trajectory, except for ring coupling, which requires .

Table 1.
Four-robot coupling strategy comparison.
4. Comparison with Existing Symmetric Coupling
Some representative works derived a two-way coupled control system for multiple robots’ synchronization and trajectory tracking [44,45], in which the authors used the tracking control framework, as summarized below, to synchronize multiple robotic manipulators.
where , is a positive diagonal matrix, the terms represent the coupling between the ith robot and its nearest neighbours, is the state vector, and represents the desired state. The control law stated above essentially consists of three components:
The model-based portion is , the servo-law portion is and the coupling portion is . The model-based portion cancels out their own dynamics, and the servo-law portion inserts the control law we choose. Depending on the task, we can choose a trajectory tracking controller or position controller. The coupling portion couples the surrounding robots with the hope that all robots will synchronize. The eigenvalues of the modified Laplacian matrix or coupling matrix L, which consists of and , are used to determine the synchronization and trajectory tracking conditions [44]. There are several coupling approaches in the coupling portion, for example, ring coupling, complete coupling, tree coupling, pruning coupling, Macaulay2 coupling, and more, based on graph theory [48]. For example, in [44], the authors studied only the two-way ring coupling and derived conditions for robots to synchronize and track the desired trajectory. Similarly, in [45], the two-way complete coupling is fully investigated.
4.1. Two-Robot System
For the two-robot system, as shown in Figure 3a, tree coupling is the same as fully connected coupling. The two-way arrow illustrated in Figure 3 represents two-way coupling. The coupling matrix . To make positive definite, all the eigenvalues of must be greater than 0, which implies that . It is assumed that and . In [44], the contraction analysis tool is used to show that is required for robots to achieve both synchronization and trajectory tracking under two-way coupling. We can also use a Lyapunov-like lemma to prove the results above.
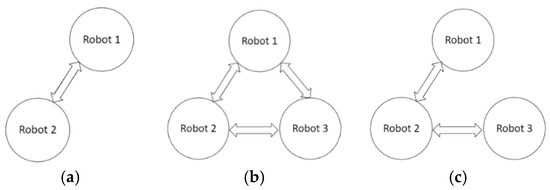
Figure 3.
Two-way coupling approach. (a) Two-robot tree/fully connected coupling. (b) Three-robot fully connected coupling. (c) Three-robot tree coupling.
Proof.
With bi-directional coupling,
With the same Lyapunov function as before, we have:
With , . Based on Barbalat’s lemma, as , which indicates that . This means two robots will synchronize. To make the two robots track the desired trajectory besides synchronizing, we choose . In this case,
As , as . Based on the structure of Equation (35), the only place that makes is , which indicates that , , and , . This means the two robots both synchronize and track the desired trajectory. □
The condition for both synchronization and trajectory tracking using Lyapunov analysis for the two-way coupling control of the two-robot system, matches the result in [44], where the contraction analysis tool is used. Furthermore, compared to two-way coupling, the gain for of asymmetric coupling control needs a lower value, i.e., , for robots to synchronize and track the desired trajectory. Notice that high servo gain can make robots stiffer, and it is not ideal for robots working in a human–robot interaction environment, as many studies have suggested [34,35,36,37]. For example, when robots accidentally come into physical contact with a human operator, the contact must be soft and compliant enough to avoid causing injury.
4.2. Three-Robot System
Fully connected coupling: The fully connected coupling control for the three-robot system is shown in Figure 3b. To make the coupling matrix positive definite, all the eigenvalues of must be greater than 0, which implies that . This fully connected coupling approach requires high gains for all robots to follow the desired trajectory. If , all three robots do not follow the desired trajectory even though they still synchronize [44]. Compared to the two-way coupling control, is needed to achieve the same task under asymmetric coupling control.
Tree coupling: The tree coupling control for the three-robot system is shown in Figure 3c. The coupling matrix . To make positive definite, . The tree coupling approach does not require to have a high gain for robots to follow the desired trajectory, compared to the fully connected coupling approach. Furthermore, compared to the two-way coupling, is needed to achieve the same task under asymmetric coupling control. We therefore showed that asymmetric coupling is better than two-way coupling, as asymmetric coupling does not require high servo feedback gains to achieve synchronization and trajectory tracking as two-way coupling does.
5. Numerical Comparison
The desired trajectory is chosen as and . The Euler integration, as shown in Equation (36), is used as the numerical method [50] to determine the solution of .
5.1. Asymmetric Coupling Control for Two Robots
Theorem 1 states that two robots will both synchronize and track the desired trajectory if . Thus, we choose , , and the physical parameters of the two identical robots are chosen as m1 = 2 kg, m2 = 1 kg, l1 = l2 = 1 m, where mi and li are the mass and length of the ith link. Their initial positions and . The robots start from rest. Figure 4 shows the two joints’ time response, which shows that the two robots both synchronize and track the desired trajectory after about 20 s.
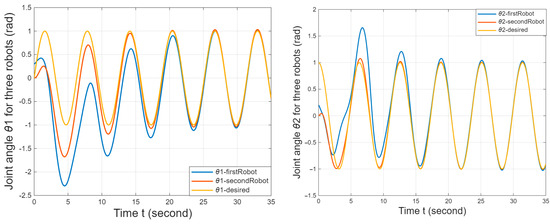
Figure 4.
Asymmetric coupling for two robots.
As a comparison to two-way coupling, with the same physical parameters, initial conditions, and and gains for robots, Figure 5 illustrates the time response of the two joints. It can be observed that the robots do not track the desired trajectory even if they exhibit synchronization behavior. From Section 4, we know that is required for two robots to both synchronize and track the desired trajectory. It is also important to note that increasing the servo gain results in stiffer robot behavior, which is undesirable in human–robot interaction environments.
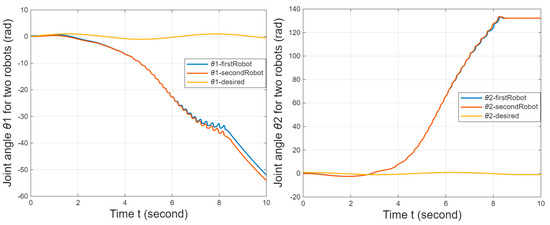
Figure 5.
Two-way coupling for two robots.
5.2. Asymmetric Coupling Control for Three Robots
Tree coupling: According to Theorem 2, three robots will both synchronize and track the desired trajectory if . We choose and as a case study. The physical parameters of the three identical robots are m1 = 2 kg, m2 = 1 kg, l1 = l2 = 1 m, and their initial positions , , and . Figure 6 illustrates the two joint time responses for the three robots. Note that the unit on the Y axis is in radians until further notice. The three robots start to synchronize and track the desired trajectory with different initial conditions after about 10 s.
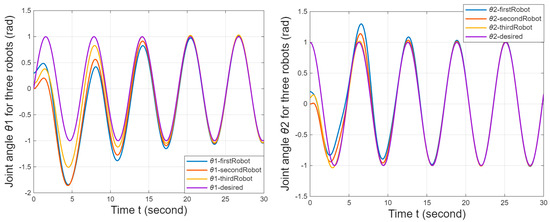
Figure 6.
Asymmetric tree coupling for three robots.
For comparison with two-way tree coupling, the same physical parameters, initial conditions, and gain values for and are used. Figure 7 presents the results under the two-way tree coupling configuration. As discussed in Section 4, the condition is required to be met for three robots to achieve both synchronization and trajectory tracking under this topology. In this case, the selected gain matrices are and , which are very close to the boundary condition . As a result, the robots require a significantly long time to synchronize and converge to the desired trajectory.
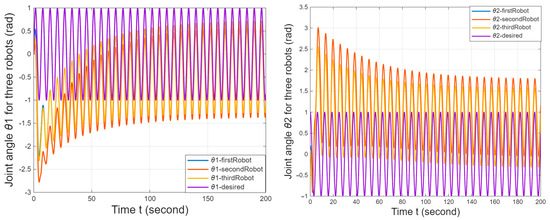
Figure 7.
Two-way tree coupling for three robots.
Fully connected coupling: From the results of Theorem 3, three robots will synchronize and track the desired trajectory if for fully connected coupling. We choose and . With the same physical parameters and initial conditions for the robots, the two joints’ response is shown in Figure 8. It is observed that when , the three robots indeed both synchronize and track the desired trajectory.
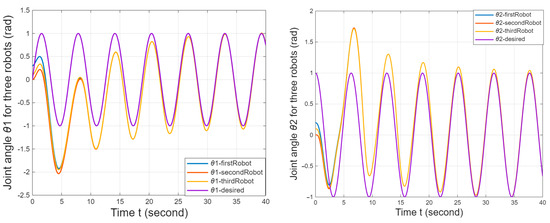
Figure 8.
Asymmetric fully connected coupling for three robots.
From Lemma 4, if , three robots synchronize without the guarantee that trajectory tracking will be achieved. So, when we change to 1, Figure 9 shows three robots synchronizing without trajectory tracking.
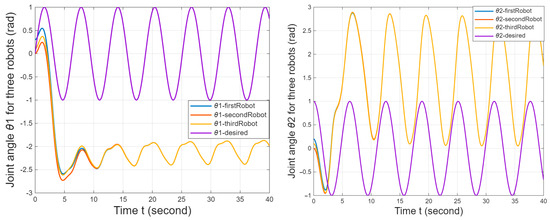
Figure 9.
Asymmetric fully connected coupling with gain .
For comparison with two-way fully connected coupling, Figure 10 shows the results using the same physical parameters, initial conditions, and gains and . As stated in Section 4, the condition is required to be met for three robots to achieve both synchronization and trajectory tracking under this coupling. With the chosen gain matrices and , the robots synchronize but fail to track the desired trajectory.
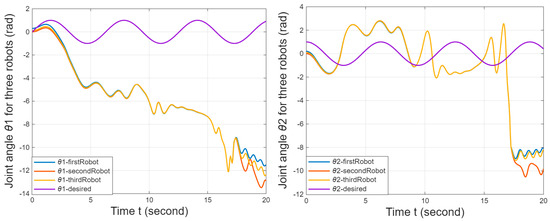
Figure 10.
Two-way fully connected coupling for three robots.
From Section 4, we know that tree coupling is slightly better than fully connected coupling, as tree coupling requires for three robots to become synchronized and track the desired trajectory, whereas is required for fully connected coupling. Furthermore, comparing the asymmetric tree coupling in Figure 6 with the asymmetric fully connected coupling in Figure 8 under the same physical parameters, initial conditions, and gains for and for the robots, we see that tree coupling takes less time for robots to become synchronized and converge to the desired trajectory, whereas asymmetric fully connected coupling takes a longer time.
5.3. Asymmetric Coupling Control for Four Robots
Tree coupling: Theorem 4 states that four robots will both synchronize and track the desired trajectory if . Consider the gain matrices and . The physical parameters of the four identical robots are as follows: masses m1 = 2 kg, m2 = 1 kg, and link lengths l1 = l2 = 1 m. Their initial joint positions are , , , . Figure 11 shows the response of the two joints.
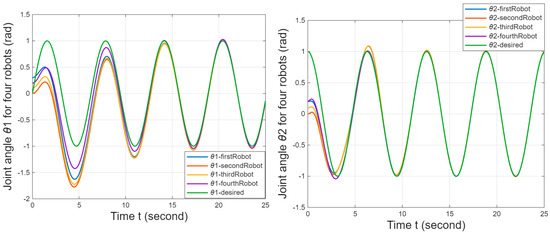
Figure 11.
Asymmetric tree coupling.
Pruning coupling: According to Theorem 5, four robots synchronize and track the desired trajectory if . Using the same robot parameters as before, with and , the responses of the two joints are shown in Figure 12.
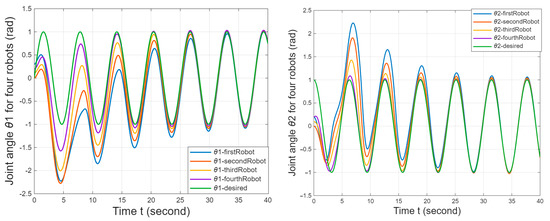
Figure 12.
Asymmetric pruning coupling.
Second pruning coupling scenario: The condition ensures that four robots both synchronize and track the desired trajectory (Theorem 6). Under the same parameter and initial condition settings as before, and with and , the two joints’ response is illustrated in Figure 13.
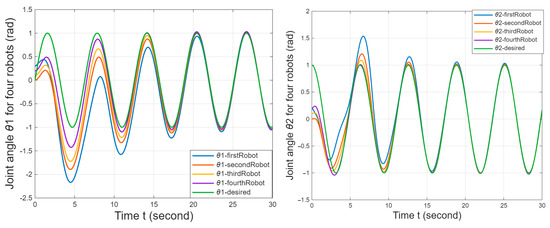
Figure 13.
Second pruning coupling scenario.
Third pruning coupling scenario: Based on Theorem 7, we know the second pruning coupling scenario and the third pruning coupling scenario have the same condition, i.e., for robots to become synchronized and track the desired trajectory. With the previously established parameters and initial conditions, and and , the two joints’ response is shown in Figure 14. We see from Figure 13 and Figure 14 that with the same coupling strength, initial conditions, and gains, robots take a longer time to synchronize and track the desired trajectory in the third coupling scenario compared to the second scenario.
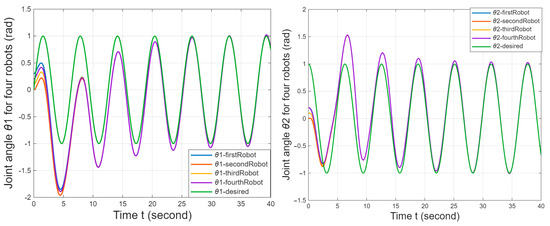
Figure 14.
Third pruning coupling scenario.
DeVille/ring coupling: As stated in Theorem 8, four robots will both track the desired trajectory and synchronize if . We choose the same parameters and initial conditions for the robots as before, and with , , Figure 15 shows the two joints’ response.
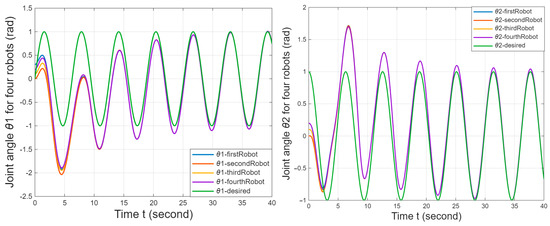
Figure 15.
Asymmetric DeVille/ring coupling.
Per Lemma 7, if , four robots synchronize, but it is not guaranteed that trajectory tracking will be performed. With and , there is synchronization, but without trajectory tracking, as seen in Figure 16.
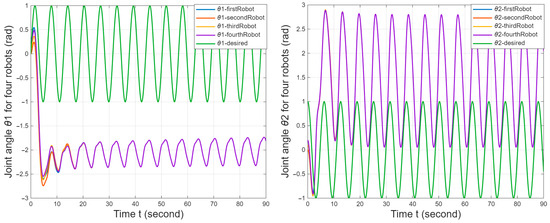
Figure 16.
Asymmetric DeVille/ring coupling with gain .
To compare with pruning coupling, let , , and with the same parameters and gains as pruning coupling, the robots synchronize, but an extremely long time is taken to track the desired trajectory, as Figure 17 shows, whereas for pruning coupling, it takes only about 30 s to become synchronized and get on the desired trajectory.
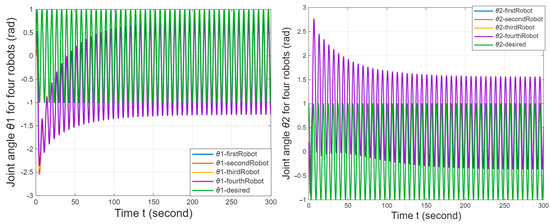
Figure 17.
Asymmetric DeVille/ring coupling with a smaller gain .
Macaulay2 coupling: Theorem 9 establishes that four robots will both track the desired trajectory and synchronize if . We choose the same parameters and initial conditions for the robots as before, and with and , Figure 18 shows the response of the two joints. In comparison with the third pruning coupling, the Macaulay2 coupling approach takes about 32 s to become synchronized and get on the desired trajectory, but for the third pruning coupling, it takes 27 s under the same and .
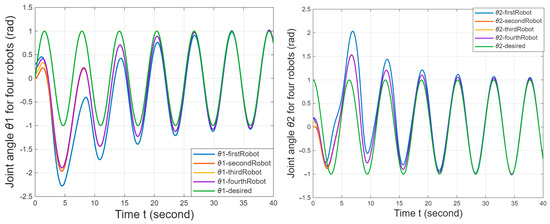
Figure 18.
Asymmetric Macaulay2 coupling.
Macaulay2 coupling (second possibility): The Macaulay2 coupling scenario has the same condition (i.e., ) as the first Macaulay2 coupling possibility (as indicated in Theorem 10). With the same parameters and same gains and as Macaulay2 coupling, Figure 19 shows that the second coupling scenario has the same output as the first scenario in terms of synchronization time and trajectory tracking time. This is because these two coupling scenarios have the same conditions (i.e., ) for the four robots to both track the desired trajectory and synchronize.
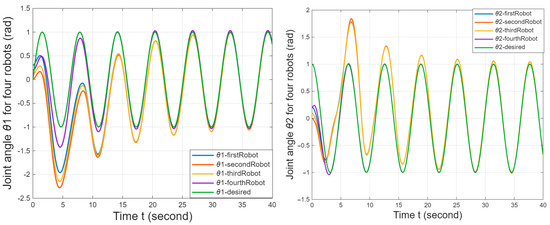
Figure 19.
Asymmetric Macaulay2 coupling (second scenario).
Macaulay2 coupling (third possibility): As stated in Theorem 11, the same condition (i.e., ) applies to Macaulay2 coupling (third possibility) for four robots to track the desired trajectory and synchronize. Under the same robot parameters, initial conditions, and gains as the first coupling scenario, however, Figure 20 shows that the robots get on the desired trajectory faster than in the previous two cases.
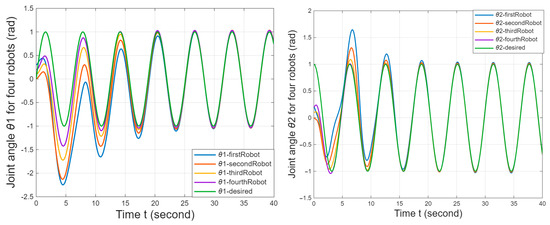
Figure 20.
Asymmetric Macaulay2 coupling (third scenario).
Fully connected coupling: Theorem 12 indicates that four robots will both track the desired trajectory and synchronize if . With and , Figure 21 shows the two joints’ response.
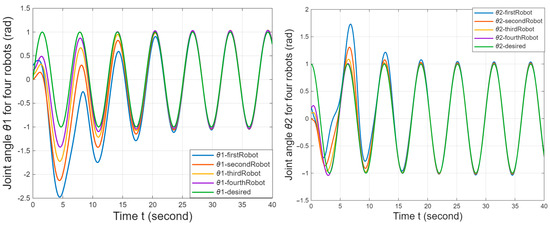
Figure 21.
Asymmetric fully connected coupling.
With the same physical parameters of the robots, the same initial conditions, and the same gains, we compare all coupling strategies and rank them based on how quickly they synchronize and track the desired trajectory, as shown in Table 1.
Based on the values of the coupling gains required for robots to both synchronize and track the desired trajectory, pruning coupling is the best, followed by DeVille/ring coupling, while the remaining strategies are equally ranked third. We can further rank them based on how quickly robots get on the desired trajectory and synchronize. Tree coupling can then be ranked in third place. Pruning coupling (2nd possibility), Macaulay2 coupling (3rd possibility), and fully connected coupling are approximately equally ranked in fourth place. Macaulay2 coupling (1st possibility), Macaulay2 coupling (2nd possibility), and pruning coupling (3rd possibility) are approximately equally ranked in the last place.
5.4. Sensitivity Analysis
A sensitivity analysis on parameter uncertainties and external disturbances is conducted in this section. We use three robots as an example. If the term is removed from the coupled control, the controller can still make the two robots synchronize and track the desired trajectory. However, with the external random disturbances, shown as in Equation (37), they will not track the desired trajectory. The external disturbance acting on each robotic manipulator is modeled as an additive joint torque disturbance that represents unmodeled dynamics and environmental perturbations, such as friction variations, actuator noise, and external forces. Specifically, the disturbance enters the dynamics as an additive term in the joint-space equations of motion.
where denotes the disturbance torque vector acting on the two joints of the i-th robot. The random disturbance can be generated using the MATLAB (version R2025B) rand function. Note that these random disturbances are different for each robot, and each element of the 2 by 1 vector is a time-varying random signal updated at every simulation step, emulating stochastic external perturbations. Figure 22 shows that three robots are controlled under the uncoupled controllers , , and , (i.e., make = 0). With external random disturbance and , three robots do not synchronize; specifically, the second joint is not in synchronization.
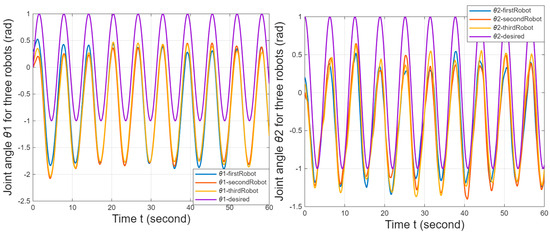
Figure 22.
Three robots using uncoupled control with disturbances.
As a comparison, if we use coupling control, for example, the fully connected asymmetric coupling approach, Figure 23 illustrates the result with and . We see that even though the robots are not tracking the desired trajectory, they synchronize.
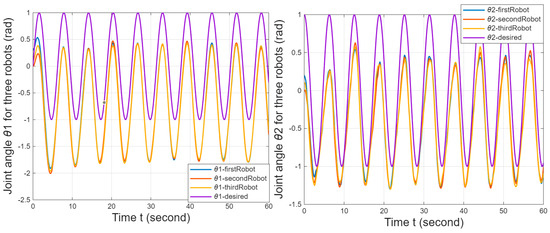
Figure 23.
Three robots operating under a fully connected asymmetric coupling approach with disturbances.
For fully connected two-way coupling, Figure 24 shows the result with and . There is not much difference between the fully connected asymmetric coupling approach and the fully connected two-way coupling approach in terms of disturbance rejection. However, is needed for the fully connected two-way coupling approach, whereas is needed for the fully connected asymmetric coupling approach. Therefore, overall, the fully connected asymmetric coupling approach is better because the servo gain is lower.
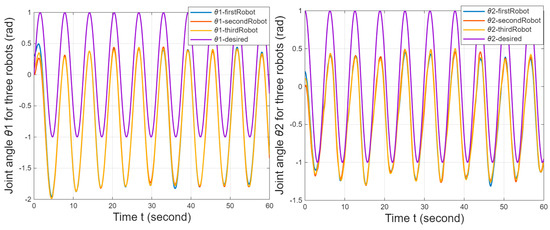
Figure 24.
Three robots operating under the fully connected two-way coupling approach with disturbances.
6. Conclusions
An asymmetric coupled control framework for multiple robotic manipulators is developed to make them both synchronize and track a desired trajectory, using a Lyapunov-like lemma to treat multiple robots as one whole system. The advantages of this approach are as follows: (1) synchronization behavior can be guaranteed even if the robots have different initial conditions or even different physical parameters, and it is immune to external disturbances; (2) we can prove the synchronization and trajectory tracking of the robots simultaneously and also derive the synchronization and trajectory-tracking conditions simultaneously; (3) without sacrificing synchronization and trajectory tracking performance, the proposed asymmetric coupled control framework allows the robots to have low servo feedback gains compared to two-way coupling control, which is critical in a physical contact environment, for example in human–robot interaction or robotic manipulation situations. By applying factorization and grouping techniques from computer algebra, we addressed the challenge of verifying the negative semi-definiteness of the Lyapunov function derivative, which arises from the inclusion of asymmetric coupling terms in the controllers.
A family of asymmetric coupled control topologies is derived for a four-robot system, and all coupling topologies are compared and ranked in terms of speed for robots to synchronize and converge on the desired trajectory. Sufficient conditions are derived in terms of servo gains and coupling gains for robots to synchronize and track the desired trajectory for a family of coupling topologies. It is shown that pruning coupling (1st scenario) is the best option because the feedback gains require the minimum value to make all the robots synchronized and track the desired trajectory. In addition, it has been shown that robots can synchronize and track trajectories even without coupling. However, under external disturbances, the coupling controller enables disturbance rejection, allowing robots to maintain synchronization even if trajectory tracking is not fully achieved, whereas a decoupled controller cannot make robots synchronize, nor can they track the desired trajectory.
The proposed asymmetric coupling control approach in this study is investigated for networks consisting of two, three, and four robotic manipulators to illustrate the control design and theoretical analysis. In future work, we will focus on extending the framework to more complex and large-scale networked robotic systems while preserving a consistent control structure. While the current work establishes the theoretical foundations of an asymmetric coupling control framework for multi-robot synchronization, practical implementation in industrial robots introduces additional complexities not captured by the continuous-time nominal models. These include state-dependent uncertainties such as joint friction, backlash, and actuator saturation, as well as software-induced effects including discretization and computation delays. Addressing these challenges would require extensions such as sampled data implementations. Developing such practical extensions is an important direction for future work.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the author.
Conflicts of Interest
The author declares no conflicts of interest.
References
- Ngo, V.T.; Liu, Y.C. Synchronization control for multiple Euler–Lagrange systems in leader–follower framework under switching and event-based communications. Int. J. Robust. Nonlinear Control 2022, 32, 8932–8947. [Google Scholar] [CrossRef]
- Pavlov, A.; Steur, E.; van de Wouw, N. Nonlinear integral coupling for synchronization in networks of nonlinear systems. Automatica 2022, 140, 110202. [Google Scholar] [CrossRef]
- Faghihi, M.; Yadegar, M.; Bakhtiaridoust, M.; Meskin, N.; Sharifi, J.; Shi, P. Distributed optimal coverage control in multi-agent systems: Known and unknown environments. Automatica 2025, 173, 112031. [Google Scholar] [CrossRef]
- Hasan, M.; Saifullah, M.K.; Kamal, M.A.S.; Yamada, K. Distributed broadcast control of multi-agent systems using hierarchical coordination. Biomimetics 2024, 9, 407. [Google Scholar] [CrossRef]
- Kalyva, D.; Psillakis, H.E. Distributed control of a mobile robot multi-agent system for Nash equilibrium seeking with sampled neighbor information. Automatica 2024, 166, 111712. [Google Scholar] [CrossRef]
- Li, X.; Wang, C.; Li, C. A distributed control strategy for groups of robots with application in flocking. Sci. Rep. 2024, 14, 32019. [Google Scholar] [CrossRef]
- Xie, N.; Hu, Y.; Chen, L. A distributed multi-agent formation control method based on deep Q learning. Front. Neurorobot. 2022, 16, 817168. [Google Scholar] [CrossRef] [PubMed]
- Jin, Z. Coordinated Control for Networked Multi-Agent Systems. Ph.D. Thesis, California Institute of Technology, Pasadena, CA, USA, 2007. [Google Scholar] [CrossRef]
- Celik, A.; Rodriguez, I.; Ayestaran, R.; Yavuz, S. Decentralized system synchronization among collaborative robots via 5G technology. Sensors 2024, 24, 5382. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Ji, J.; Miao, Z.; Zhou, J. Synchronization control for networked mobile robot systems based on Udwadia–Kalaba approach. Nonlinear Dyn. 2021, 105, 315–330. [Google Scholar] [CrossRef]
- Wang, C.; Ji, J.; Miao, Z.; Zhou, J. Udwadia-Kalaba approach based distributed consensus control for multi-mobile robot systems with communication delays. J. Frankl. Inst. 2022, 359, 7283–7306. [Google Scholar] [CrossRef]
- Xu, H.; Liu, G.; Yang, X.; Hua, C. Adaptive synchronization control for bilateral teleoperation systems with global prescribed performance. In Proceedings of the 2024 International Conference on Frontiers of Intelligent Manufacturing and Automation, Baotou, China, 12–14 January 2024; pp. 705–708. [Google Scholar]
- Tran, D.T.; Dao, H.V.; Ahn, K.K. Adaptive synchronization sliding mode control for an uncertain dual-arm robot with unknown control direction. Appl. Sci. 2023, 13, 7423. [Google Scholar] [CrossRef]
- Zhao, F.; Liu, D.; Zong, X.; Cheng, X.; Xu, Z.; Gao, D.; Gao, W. An adaptive PI method on synchronisation control of multi-agent systems modelled by wave equations. Int. J. Control 2025, 1–20. [Google Scholar] [CrossRef]
- Zhai, A.; Wang, J.; Zhang, H.; Lu, G.; Li, H. Adaptive robust synchronized control for cooperative robotic manipulators with uncertain base coordinate system. ISA Trans. 2022, 126, 134–143. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, D.; Gao, F. Optimal synchronization control for heterogeneous multi-agent systems: Online adaptive learning solutions. Asian J. Control 2022, 24, 2352–2362. [Google Scholar] [CrossRef]
- Zeng, X.; Yang, Y.; Zhao, J.; Li, J. Fully distributed event-triggered control for multi-robot systems based on modal space framework. Nonlinear Dyn. 2024, 112, 3605–3618. [Google Scholar] [CrossRef]
- Awan, I.; Tahir, F.; Rehan, M.; Hong, K. Observer-based event-triggered leader-following consensus of multi-agents with generalized Lipschitz nonlinear dynamics. ISA Trans. 2023, 137, 98–110. [Google Scholar] [CrossRef]
- He, J.; Liao, J. Formation tracking control with disturbance rejection in leader-follower multi-agent systems under dynamic event-triggered mechanism. Eng. Appl. Artif. Intell. 2024, 133, 108441. [Google Scholar] [CrossRef]
- Chen, C.; Peng, Z.; Zou, C.; Shi, K.; Huang, R.; Cheng, H. Event-triggered robust optimal control for robotic manipulators with input constraints via adaptive dynamic programming. IFAC-PapersOnLine 2023, 56, 841–846. [Google Scholar] [CrossRef]
- Zhu, Q.; Yu, J.; Liu, J.; Zhang, X. Event-triggered formation control for multi-wheeled mobile robot systems under a chained directed network topology. In Proceedings of the 2024 43rd Chinese Control Conference, Kunming, China, 28–31 July 2024; pp. 5388–5392. [Google Scholar]
- Kawasaki, H.; Ueki, S.; Ito, S. Decentralized adaptive coordinated control of multiple robot arms without using a force sensor. Automatica 2006, 42, 481–488. [Google Scholar] [CrossRef]
- Dong, Y.; Li, Z.; Zhao, X.; Ding, Z.; Huang, X. Decentralised and cooperative control of multi-robot systems through distributed optimisation. In Proceedings of the 2023 International Conference on Autonomous Agents and Multiagent Systems, London, UK, 29 May–2 June 2023; pp. 1421–1429. [Google Scholar]
- Zheng, K.; Hu, Y.; Wu, B. Trajectory planning of multi-degree-of-freedom robot with coupling effect. J. Mech. Sci. Technol. 2019, 33, 413–421. [Google Scholar] [CrossRef]
- Zhang, F.; Yuan, Z.; Zhang, F. Research on coupling dynamics modeling and composite control of the multi-flexible space robot. Adv. Space Res. 2024, 74, 3101–3122. [Google Scholar] [CrossRef]
- Givigi, S.N.; Cabral, K.M.; Jardine, P.T. Group Synchronization in Coordination Tasks via Network Control Methods. IFAC-PapersOnLine 2020, 53, 10182–10187. [Google Scholar] [CrossRef]
- Mostafaoui, G.; Schmidt, R.C.; Hasnain, S.K.; Salesse, R.; Marin, L. Human unintentional and intentional interpersonal coordination in interaction with a humanoid robot. PLoS ONE 2022, 17, e0261174. [Google Scholar] [CrossRef]
- Eudes, A.; Bertrand, S.; Marzat, J.; Sarras, I. Distributed control for multi-robot interactive swarming using voronoi portioning. Drones 2023, 7, 598. [Google Scholar] [CrossRef]
- Zhang, P.; Qing, W.; Lai, X.; Wang, Y.; Wu, M. Cooperative control of multiple magnetically controlled soft robots. Inf. Sci. 2024, 677, 120790. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, X.; Tao, B.; Ding, H. Multi-objective synchronization control for dual-robot interactive cooperation using nonlinear model predictive policy. IEEE Trans. Ind. Electron. 2023, 70, 582–593. [Google Scholar]
- Pérez-Fuentevilla, J.G.; Morales-Díaz, A.B.; Rodríguez-Ángeles, A. Synchronization control for a mobile manipulator robot (MMR) system: A first approach using trajectory tracking master–slave configuration. Machines 2023, 11, 962. [Google Scholar] [CrossRef]
- Bertram, T.; Bryg, M.; Kotschenreuther, J.; Kipfmüller, M. Control concept for coupled robots and stiffness analysis. Procedia CIRP 2024, 126, 230–235. [Google Scholar] [CrossRef]
- Zacharaki, A.; Kostavelis, I.; Gasteratos, A.; Dokas, I. Safety bounds in human robot interaction: A survey. Saf. Sci. 2020, 127, 104667. [Google Scholar] [CrossRef]
- Popov, D.; Pashkevich, A.; Klimchik, A. Adaptive technique for physical human–robot interaction handling using proprioceptive sensors. Eng. Appl. Artif. Intell. 2023, 126, 107141. [Google Scholar] [CrossRef]
- Fan, Y.; Yi, B.; Liu, D. An overview of stiffening approaches for continuum robots. Robot. Comput. Integr. Manuf. 2024, 90, 102811. [Google Scholar] [CrossRef]
- Xia, H.; Zhang, Y.; Rajabi, N.; Taleb, F.; Yang, Q.; Kragic, D.; Li, Z. Shaping high-performance wearable robots for human motor and sensory reconstruction and enhancement. Nat. Commun. 2024, 15, 1760. [Google Scholar] [CrossRef]
- She, Y.; Su, H.; Meng, D.; Lai, C. Design and modeling of a continuously tunable stiffness arm for safe physical human-robot interaction. ASME J. Mech. Robot. 2020, 12, 011006. [Google Scholar] [CrossRef]
- Léchevina, N.; Rabbathb, C.; Sicardc, P. Trajectory tracking of leader–follower formations characterized by constant line-of-sight angles. Automatica 2006, 42, 2131–2141. [Google Scholar] [CrossRef]
- Chen, Z.; Yang, J.; Zong, X. Leader-follower synchronization controller design for a network of boundary-controlled wave PDEs with structured time-varying perturbations and general disturbances. J. Frankl. Inst. 2021, 358, 834–855. [Google Scholar] [CrossRef]
- Klotz, J.R.; Kan, Z.; Shea, J.M.; Pasiliao, E.L.; Dixon, W.E. Asymptotic synchronization of a leader-follower network of uncertain Euler-Lagrange systems. IEEE Trans. Control Netw. Syst. 2015, 2, 174–182. [Google Scholar] [CrossRef]
- Yang, Y.; Modares, H.; Wunsch, D.; Yin, Y. Leader-follower output synchronization of linear heterogeneous systems with active leader using reinforcement learning. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 2139–2153. [Google Scholar] [CrossRef]
- Hirata-Acosta, J.; Pliego-Jiménez, J.; Cruz-Hernádez, C.; Martínez-Clark, R. Leader-follower formation control of wheeled mobile robots without attitude measurements. Appl. Sci. 2021, 11, 5639. [Google Scholar] [CrossRef]
- Zhang, X.; Yu, X.; Chen, W. Leader-follower trajectory tracking control for a mobile robot with unknown amplitudes of reference velocities and input disturbances. In Proceedings of the IEEE 58th Conference on Decision and Control, Nice, France, 11–13 December 2019; pp. 499–504. [Google Scholar]
- Chung, S.J.; Slotine, J.J. Cooperative robot control and concurrent synchronization of Lagrangian systems. IEEE Trans. Robot. 2009, 25, 686–700. [Google Scholar] [CrossRef]
- Rodriguez-Angeles, A.; Nijmeijer, H. Mutual synchronization of robots via estimated state feedback: A cooperative approach. IEEE Trans. Control Syst. Technol. 2004, 12, 542–554. [Google Scholar] [CrossRef]
- Pang, T.; Suh, H.J.T.; Yang, L.; Tedrake, R. Global Planning for Contact-Rich Manipulation via Local Smoothing of Quasi-Dynamic Contact Models. IEEE Trans. Robot. 2023, 39, 4691–4711. [Google Scholar] [CrossRef]
- Marcucci, T.; Petersen, M.; Wrangel, D.; Tedrake, R. Motion planning around obstacles with convex optimization. Sci. Robot. 2023, 8, eadf7843. [Google Scholar] [CrossRef] [PubMed]
- Slotine, J.J.; Li, W. Applied Nonlinear Control; Prentice Hall: Hoboken, NJ, USA, 1991. [Google Scholar]
- Townsend, A.; Stillman, M.; Strogatz, S. Dense networks that do not synchronize and sparse ones that do. Chaos 2020, 30, 083142. [Google Scholar] [CrossRef] [PubMed]
- Mohan, S. Investigation into the dynamics and control of an underwater vehicle-manipulator system. Model. Simul. Eng. 2013, 2023, 839046. [Google Scholar]
























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.