1. Introduction
Currently, most control systems defined by differential equations use integer-order derivatives. Many real-world systems exhibit fractional-order characteristics. Using fractional-order derivatives enables a more accurate capture of their dynamic behavior. As science and technology advance and our understanding of natural systems deepens, fractional calculus has found broad applicability across various domains [
1]. In electrical engineering, growing evidence suggests that inductors and capacitors inherently exhibit fractional-order behavior, and fractional calculus offers a more accurate modeling framework. Concurrently, scholars are developing new methods for analyzing and designing fractional-order inductors and capacitors [
2,
3,
4,
5,
6,
7,
8,
9]. The fractional-order characteristics of inductors and capacitors have had a significant impact on power electronic converter research, influencing topology design, modeling, analysis, and control strategies, and opening up a new research direction.
Integrating fractional-order inductors and fractional-order capacitors into power electronics topologies allows for a more accurate representation of their inherent dynamic behavior. Research on fractional-order power electronic converters has mainly focused on DC/DC converters [
10,
11,
12,
13]. Recently, the research scope has expanded to include fractional-order rectifiers [
14,
15], inverters [
16,
17,
18,
19,
20,
21,
22], and static compensators [
23,
24]. Findings suggest that fractional-order models more accurately represent the actual operating conditions of power electronic equipment. Fractional calculus is widely used in controller design, where adjustable fractional-order parameters improve control performance. Fractional-order controllers commonly used in power systems include fractional-order PID control [
14,
17,
19], fractional-order sliding mode control [
23], and fractional-order active disturbance rejection control [
25], highlighting their potential to enhance control performance.
In modern power systems, distributed generation control frameworks primarily connect renewable energy to the grid through grid-connected inverters. This approach offers significant advantages in control flexibility and response speed over conventional synchronous generator connections. However, the inherent randomness and volatility of large-scale distributed power source integration can significantly affect grid stability, imposing stricter performance requirements on three-phase inverters as critical components [
26,
27]. Research on traditional three-phase inverters is well established, with fractional calculus recognized as a novel method for improving inverter performance. Current research primarily focuses on integrating fractional-order inductors and fractional-order capacitors into inverter topologies and applying fractional-order controllers, such as fractional-order models and fractional-order control.
In the context of fractional-order modeling, Ref. [
16] developed a fractional-order model of a single-phase inverter over one switching cycle. The study employed the state-space averaging method to derive a small-signal model, showing that it more closely approximates the real system. Ref. [
17] proposed high- and low-frequency models for a fractional-order three-phase L-type grid-connected inverter and designed a decoupled control structure for the fractional-order current inner loop. Simulation results indicate that the system achieves improved dynamic and static performance, significantly enhancing grid power quality compared to traditional integer-order systems. Ref. [
19] integrated a fractional-order LCL filter into a grid-side inverter for wind power generation and applied fractional-order PI controllers for its control. By properly selecting the fractional orders of the filter’s capacitor and inductor, the resonance issue inherent in traditional LCL filters was effectively mitigated. Simulations demonstrated that a fully fractional-order grid-side inverter system significantly improves grid power factor and DC-link voltage regulation compared to an integer-order system. These studies suggest that fractional-order models more accurately represent real systems and better capture the true operational behavior of converters.
In the context of fractional-order control, extensive research has been conducted on applying fractional-order PI control to three-phase inverters. However, with increasing renewable energy penetration, the low inertia and undamped characteristics of power electronic devices have negatively impacted power system stability. Virtual synchronous generator (VSG) control, which emulates the frequency and voltage behavior of synchronous generators, has emerged as a promising solution [
28]. This control strategy allows three-phase inverters to replicate synchronous generator characteristics, supplying inertia and damping to mitigate voltage and frequency fluctuations on the grid [
29]. Given these advantages, exploring fractional-order characteristics within VSG control has become particularly relevant. Ref. [
20] introduces a virtual synchronous generator incorporating fractional-order virtual inertia. Compared to conventional VSG technology using first-order inertia, this method effectively suppresses active power oscillations and improves the performance of grid-connected inverters. Ref. [
21] proposes an optimized active response strategy for VSG, incorporating fractional-order derivative correction. This strategy introduces a fractional-order correction component into conventional VSG active control, effectively reducing dynamic oscillations and overshoots in active power. Ref. [
22] presents a novel fractional-order virtual synchronous generator (FOVSG) control scheme and provides a detailed controller design. Experimental results confirm the superior performance of FOVSG control in both grid-connected and islanded modes. These studies demonstrate that integrating fractional-order control into controller design enhances flexibility and leads to improved performance.
Current research on VSG control predominantly employs integer-order models, frequently overlooking the intrinsic fractional-order characteristics of inductors and capacitors. This paper proposes a fractional-order LC three-phase inverter using fractional-order virtual synchronous generator control and adaptive rotational inertia optimization. The main contributions of this study are summarized as follows:
A mathematical model of the fractional-order three-phase LC inverter is established in both the three-phase stationary coordinate system and the synchronously rotating coordinate system.
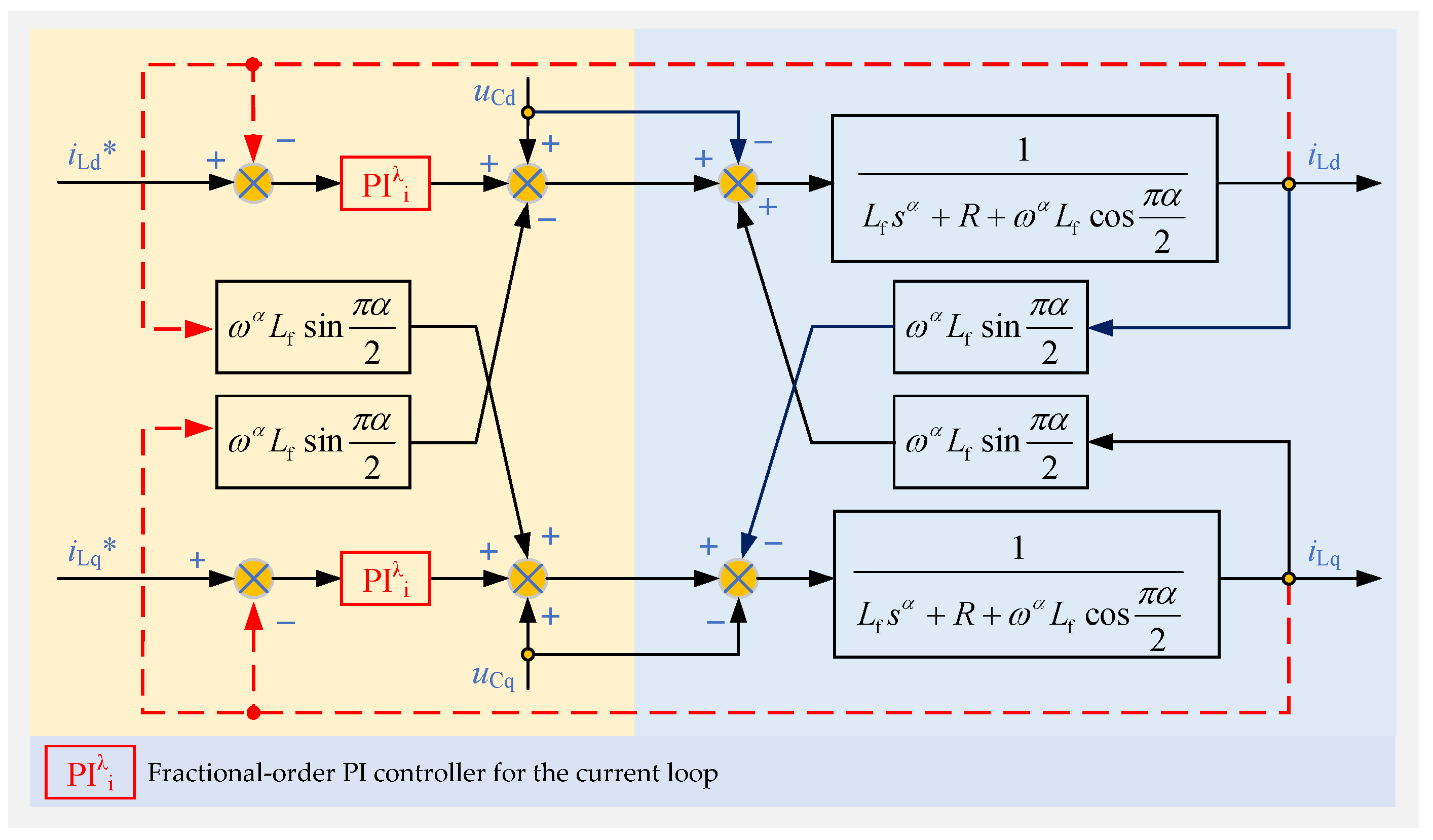
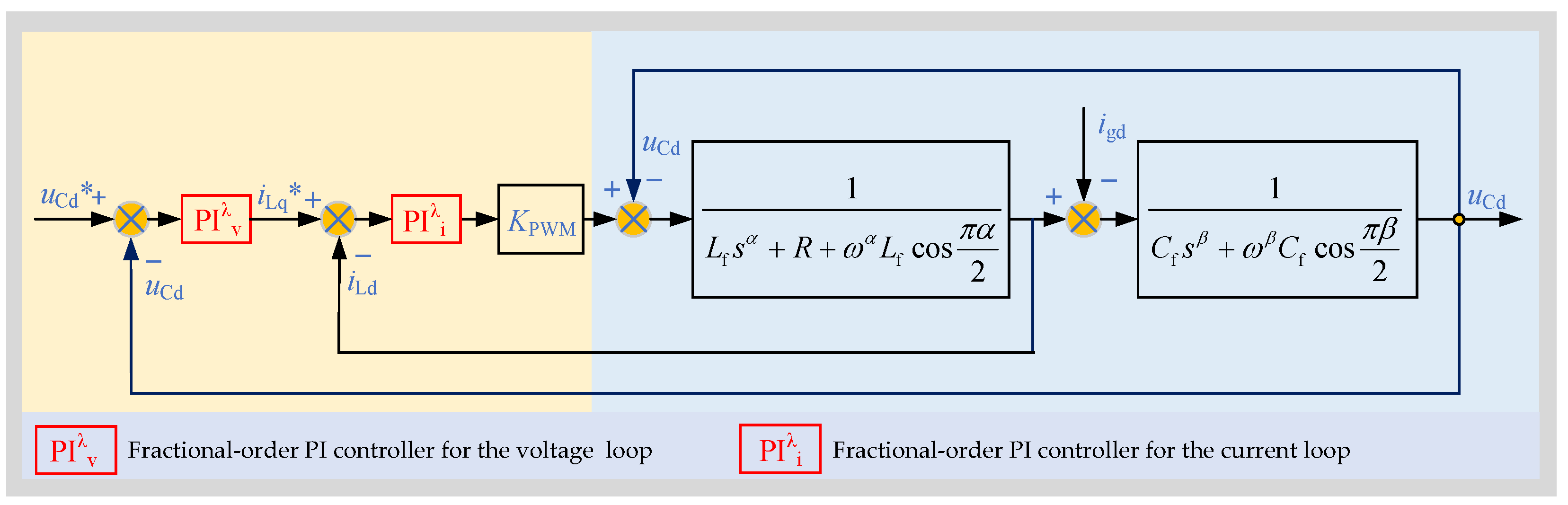
A fractional-order decoupling control structure with voltage and current loops is designed to implement d–q axis decoupling control for the fractional-order three-phase LC inverter.
An FOVSG with adaptive rotational inertia optimization is developed to improve the inverter’s dynamic response under disturbances.
The paper is structured as follows:
Section 2 introduces the fractional-order three-phase inverter system and the implementation of fractional calculus operators.
Section 3 elaborates on the fractional-order model of the three-phase inverter, encompassing the mathematical model, characteristics of the fractional-order LC filter, and the dual closed-loop control strategy.
Section 4 analyzes the FOVSG control strategy, covering its principles, stability assessment, and adaptive rotational inertia control.
Section 5 presents digital simulation analysis.
Section 6 provides the discussion.
Section 7 concludes with a summary of key findings.
5. Simulation and Analysis
Simulations are conducted using MATLAB/Simulink (Version R2023b) to validate the features and control method of the proposed fractional-order three-phase inverter, with the solver type ode23t, a time step of
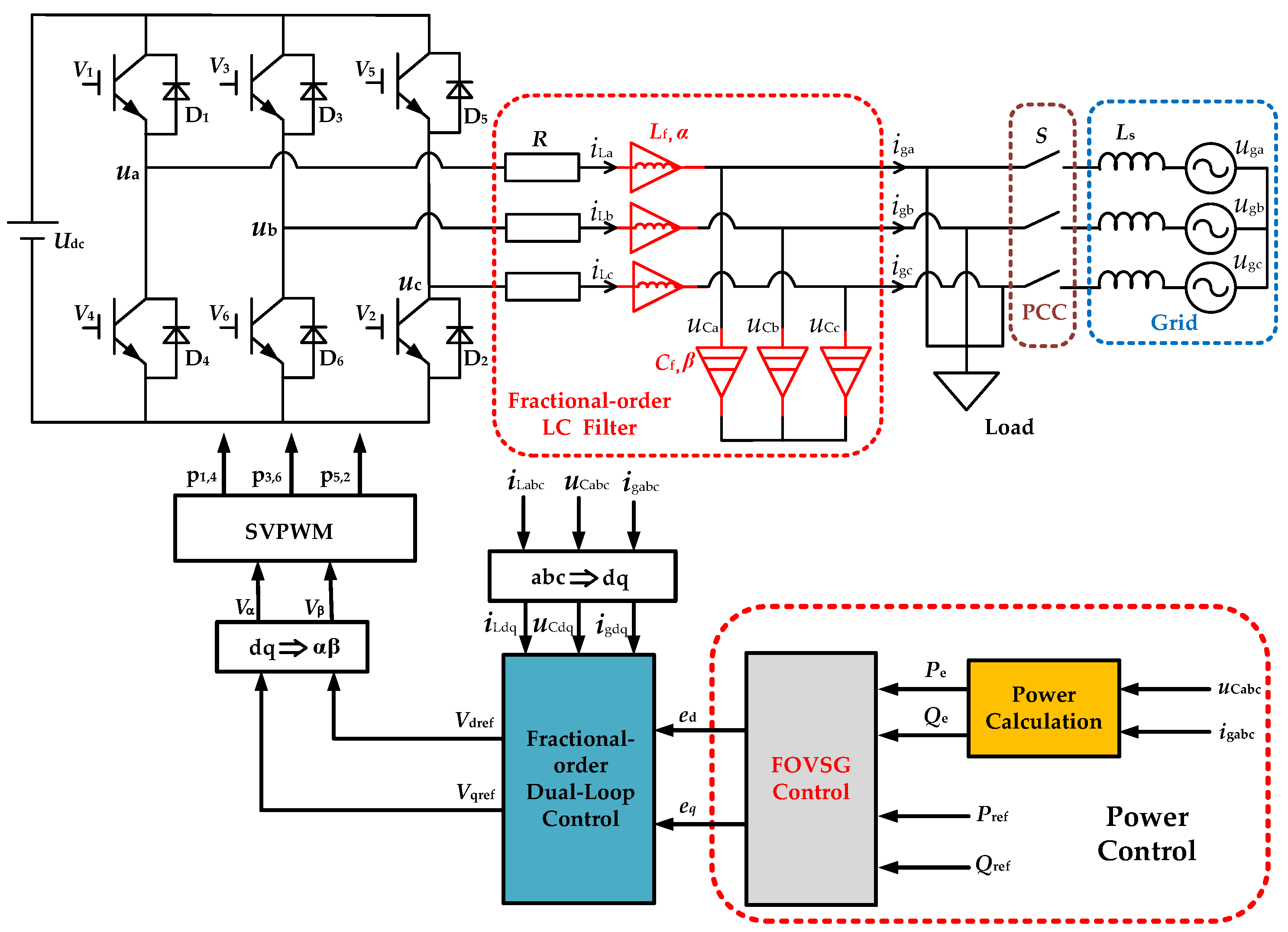
s, and a sampling frequency of 20 kHz. The simulation model was developed based on the structure shown in
Figure 2. On the DC side, an ideal DC voltage source module in Simulink simulates the energy storage battery, while an ideal regulated AC voltage source signifies an endless grid on the AC side. The principal circuit parameters are enumerated in
Table 3. The fractional-order PI controller and other fractional-order elements used in the simulation model were developed using the FOTF toolbox [
39].
5.1. Simulation Analysis of Variations in Fractional-Order Inductor and Capacitor Orders
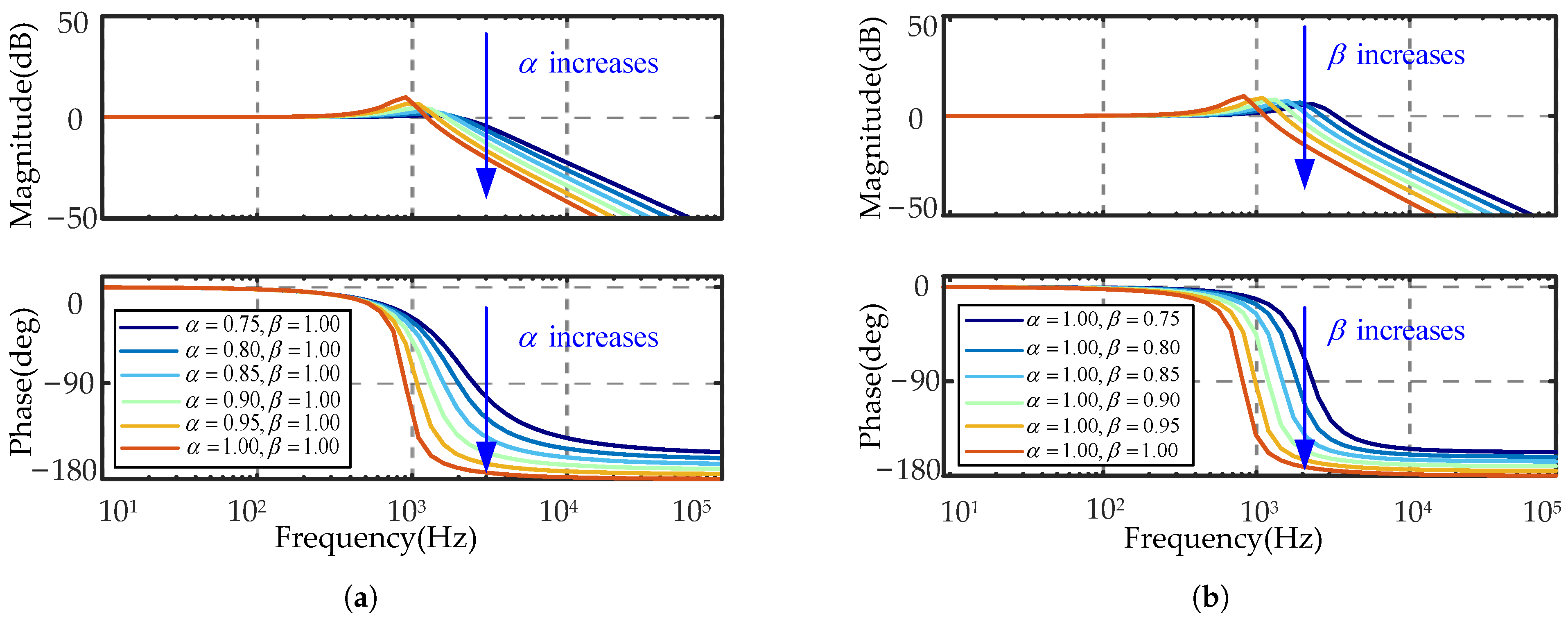
The system is simulated in an open-loop, no-load state to study the impact of fractional-order capacitors and fractional-order inductors on inverter performance. Initially, the effect of varying the orders of fractional-order inductors on system performance is examined, with the orders of fractional-order capacitors held constant. Subsequently, the influence of changing the orders of fractional-order capacitors on the system’s dynamic characteristics is explored, while keeping the orders of fractional-order inductors fixed.
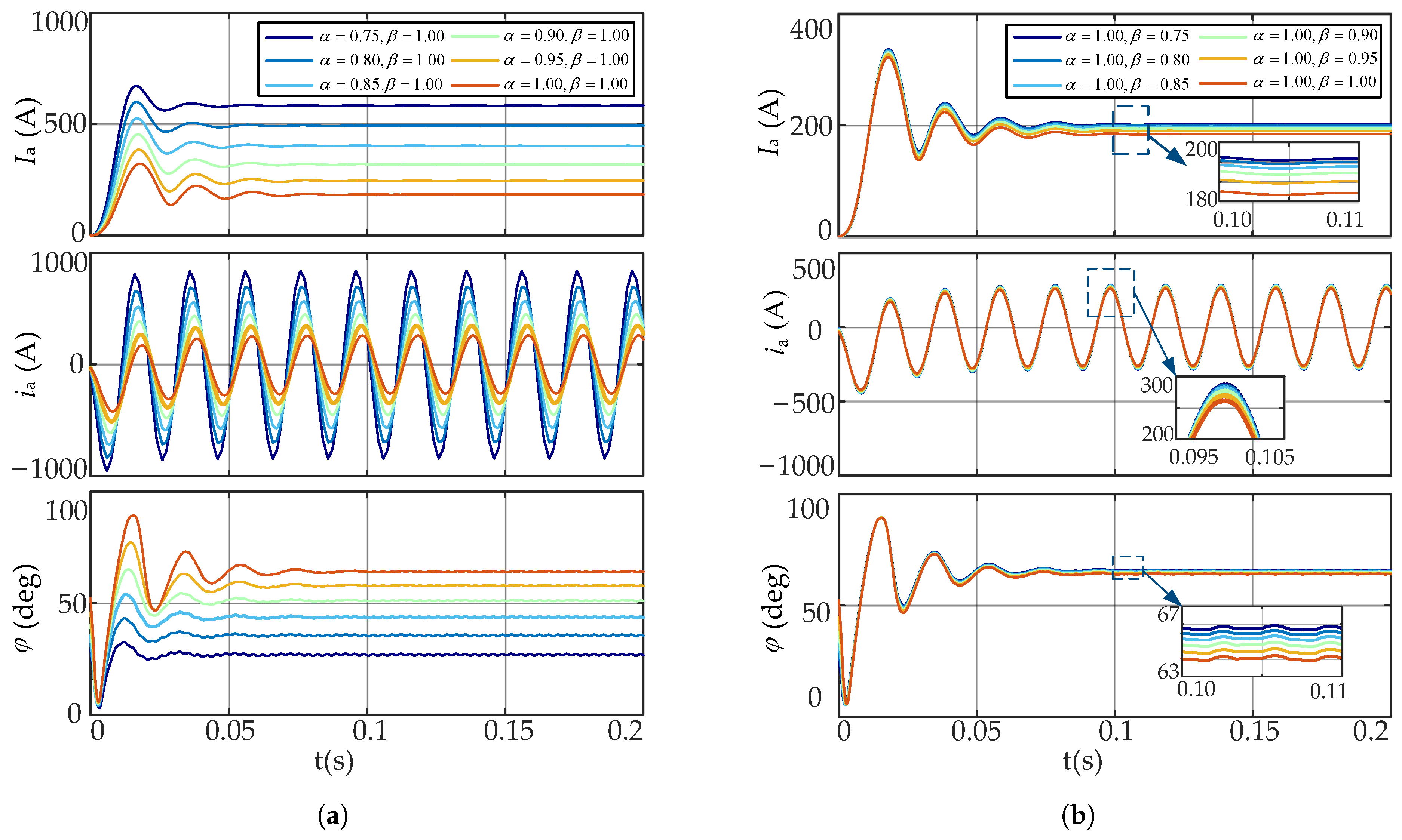
Figure 12 displays the simulation results for the grid-connected current of phase A.
Figure 12a depicts the grid-connected condition as
rises from 0.75 to 1, with
maintained at 1.
Figure 12b illustrates the grid-connected condition as
ranges from 0.75 to 1, with
maintained at 1. In the illustration,
signifies the RMS value of the A-phase grid-connected current,
depicts its instantaneous value, and
represents the phase angle difference between the A-phase voltage and current. To facilitate the study, comprehensive simulation data are included in
Table 4. The preliminary Total Harmonic Distortion (THD) readings represent the first 0.1 s, whereas the steady-state values span from 0.1 s to 0.2 s.
Figure 12 and
Table 4 illustrate that while
remains constant and
rises from 0.75 to 1, Ia markedly declines from 582.68 A to 183.87 A, signifying that elevated
values diminish the current amplitude. Furthermore,
escalates from 26.57° to 64.26°, indicating that when
rises, the phase lag between voltage and current becomes increasingly significant. The initial THD climbs from 5.32% to 13.12% as
rises, signifying that harmonic distortion in the initial phase escalates with
, affecting the system’s transient performance. While this elevated THD diminishes post-stabilization, it may induce current waveform distortion or exacerbate grid stress during the early phase. The total harmonic distortion (THD) diminishes from 1.31% to 0.59% in steady-state, signifying that an increase in
reduces the steady-state THD, thereby improving current quality. With
set at 1 and
varying from 0.75 to 1, Ia exhibits a minor fluctuation, keeping within the range of 201.24 A to 183.87 A, indicating that the influence of
on current amplitude is constrained. The variation in
spans from 64.26° to 65.86°, suggesting that
’s influence on the system’s phase difference is negligible. Although the initial total harmonic distortion (THD) marginally rises with an increase in
, the steady-state THD continuously remains low.
In summary, has a significant impact on the current amplitude, phase difference, and harmonic distortion of the grid-connected inverter. A higher enhances steady-state harmonic suppression but reduces current amplitude, thereby affecting the system’s active power output. Reducing appropriately can effectively decrease current phase lag, improving system efficiency and power delivery. If harmonic distortion requirements are met, performance indicators such as power factor and dynamic response can be prioritized. Considering all these factors, is chosen in this study to balance harmonic suppression and output performance. In contrast, has minimal impact on current amplitude and phase but plays a crucial role in harmonic attenuation. If is set too low, high-frequency harmonic attenuation weakens, resulting in reduced filtering performance. Therefore, is selected in this study to ensure effective harmonic suppression without significantly affecting other dynamic characteristics of the system.
In conclusion, the selection of and strikes a balance between harmonic control requirements, system efficiency, and dynamic performance. Furthermore, since the fractional orders of practical inductors and capacitors are typically close to one, these parameter choices also help reduce hardware implementation complexity and improve system feasibility.
5.2. Simulation Analysis of FOVSG Control
To validate the analytical results in
Section 4.2 and assess the disturbance rejection capability of the proposed control strategy, two typical external disturbances were considered:
- (1)
A step change in active power reference, simulating sudden variations in power commands from upper-level dispatch.
- (2)
A load power disturbance, introduced to emulate abrupt changes in load demand.
5.2.1. Grid-Connected Mode
To evaluate the dynamic performance of the proposed control system, a step change in the active power reference was applied while the inverter operated in grid-connected mode. In this scenario, the grid frequency
f was fixed at 50 Hz, and the inverter initially ran under nominal conditions. The inverter supplies active power to the grid, with the active power reference
established at 5 kW. After one second,
is increased to 10 kW. The dual-loop control parameters are shown in
Table 5, and the FOVSG control parameters are shown in
Table 6.
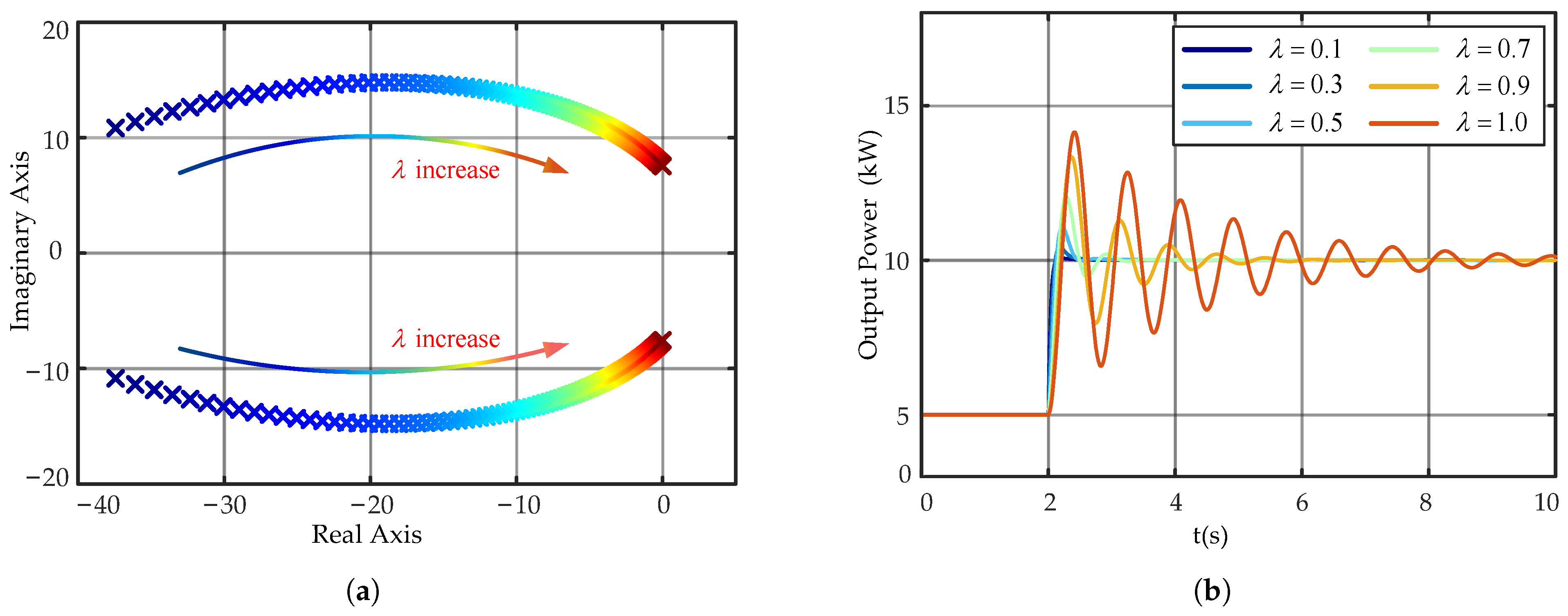
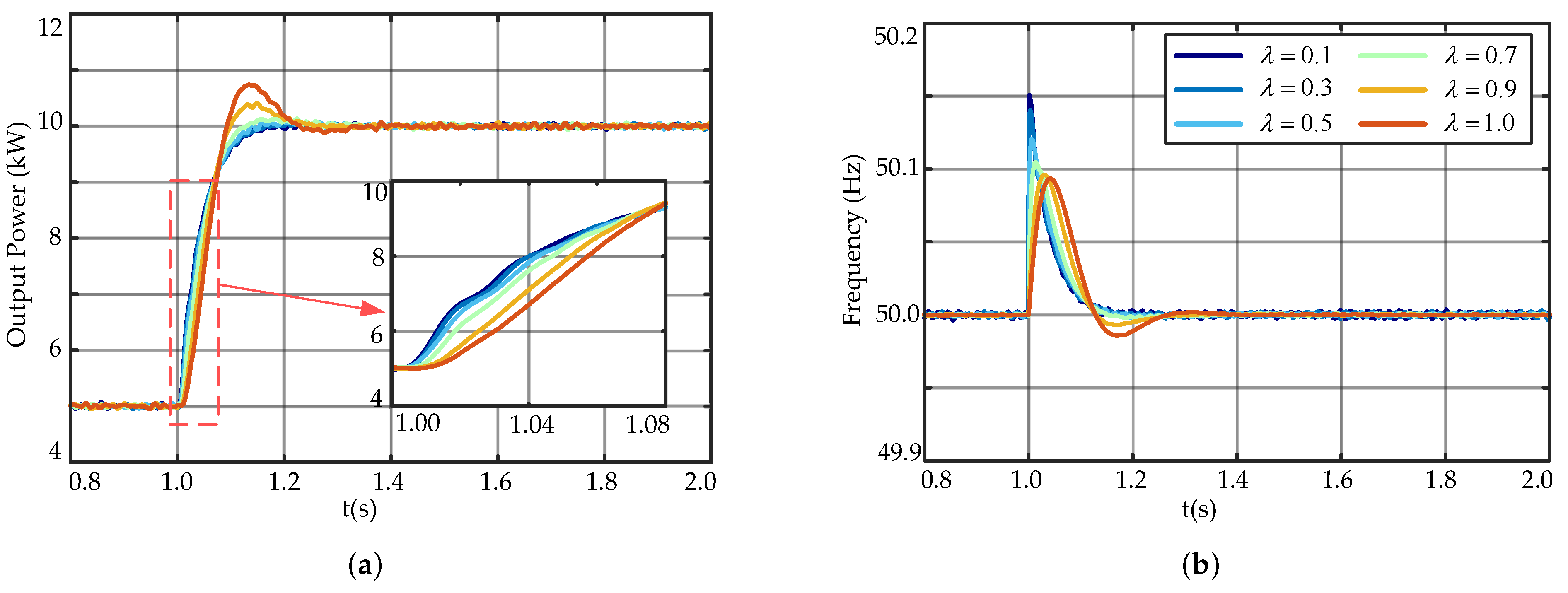
Figure 13 depicts the power–frequency response curve for a step change in
from 5 kW to 10 kW under grid-connected settings, with differing rotor orders
of the FOVSG.
Figure 13a illustrates that with an increase in
, the active power response demonstrates greater overshoot and oscillations. Smaller
results in a steadier power response, characterized by quicker adjustments and reduced overshoot. When
, the active power exhibits the largest overshoot. As
grows, more pronounced inertial effects result in heightened overshoot, oscillations, and diminished response speed.
Figure 13b illustrates that a reduced
results in a rapid system response to step changes, leading to more pronounced frequency increases and greater fluctuations. When
, the transient frequency variation is at its highest. As
increases, the frequency response attains a more gradual profile. At higher values of
, the frequency curve exhibits more pronounced oscillations.
The simulation results validate the influence of on the performance of grid-connected control. Reduced values enhance dynamic reaction speed but compromise immediate frequency stability, whereas increased values yield smoother responses but heighten the likelihood of oscillations. These findings indicate that selection must equilibrate response velocity and system stability.
5.2.2. Islanding Mode
The following scenarios are designed to assess the impact of load power disturbance on system frequency response during islanded operation, where the load power is denoted as
. Initially,
and
are both 5 kW, resulting in a balanced system. After 1 s,
increases to 10 kW to simulate a sudden load escalation and examine its impact on system frequency response. The control parameters are unchanged as detailed in
Table 5. The simulation results are shown in
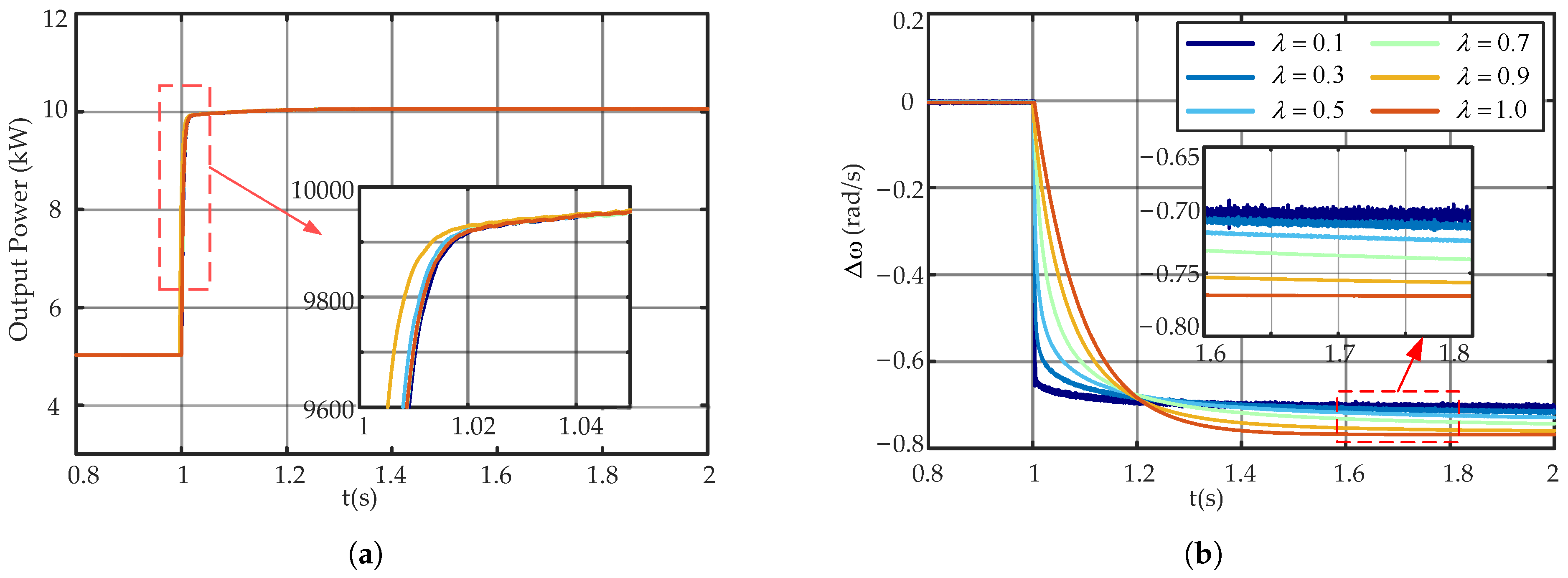
Figure 14.
Figure 14a illustrates the active power response under a load increase from 5 kW to 10 kW during islanding mode. It can be observed that variations in
have negligible impact on the power response during this disturbance, as the instantaneous increase in load power predominantly governs the power response.
Figure 14b shows that for a step load disturbance of
, increasing
leads to a smoother transient frequency response and a lower rate of change. This confirms the theoretical insight that a higher
enhances virtual inertia and suppresses the rate of frequency variation. Although the steady-state frequency deviation increases with larger values of
, the overall increment is relatively small (approximately 0.1 rad/s), which indicates that the influence on steady-state frequency remains within an acceptable range from an engineering perspective. Therefore, in islanded mode, varying
primarily affects the transient rate of frequency change, while its influence on the steady-state frequency deviation remains limited.
5.3. Simulation Analysis of Adaptive Rotational Inertia Control
To verify the feasibility of the proposed Adaptive Rotational Inertia Control of FOVSG (ADJ-FOVSG) strategy, in grid-connected mode, both
and
are initially set to 5 kW, and at 1 s,
suddenly increases to 10 kW. The case of Adaptive Rotational Inertia Control of FOVSG with
is selected as a reference, which corresponds to the traditional VSG with adaptive rotational inertia control (ADJ-VSG). Apart from the different
values, the other control parameters of the FOVSG are the same as those in the previous section, and the parameters for the adaptive rotational inertia control are shown in
Table 7.
To suppress power overshoot and reduce the transient rate of change in frequency, the fractional rotor order
in the ADJ-FOVSG is set to 0.7. This configuration also helps reduce fluctuations in
J during adaptive control. Finally, the results are compared for four control strategies: ADJ-FOVSG, ADJ-VSG, FOVSG with
, and VSG with
, as shown in
Figure 15,
Figure 16,
Figure 17,
Figure 18 and
Figure 19.
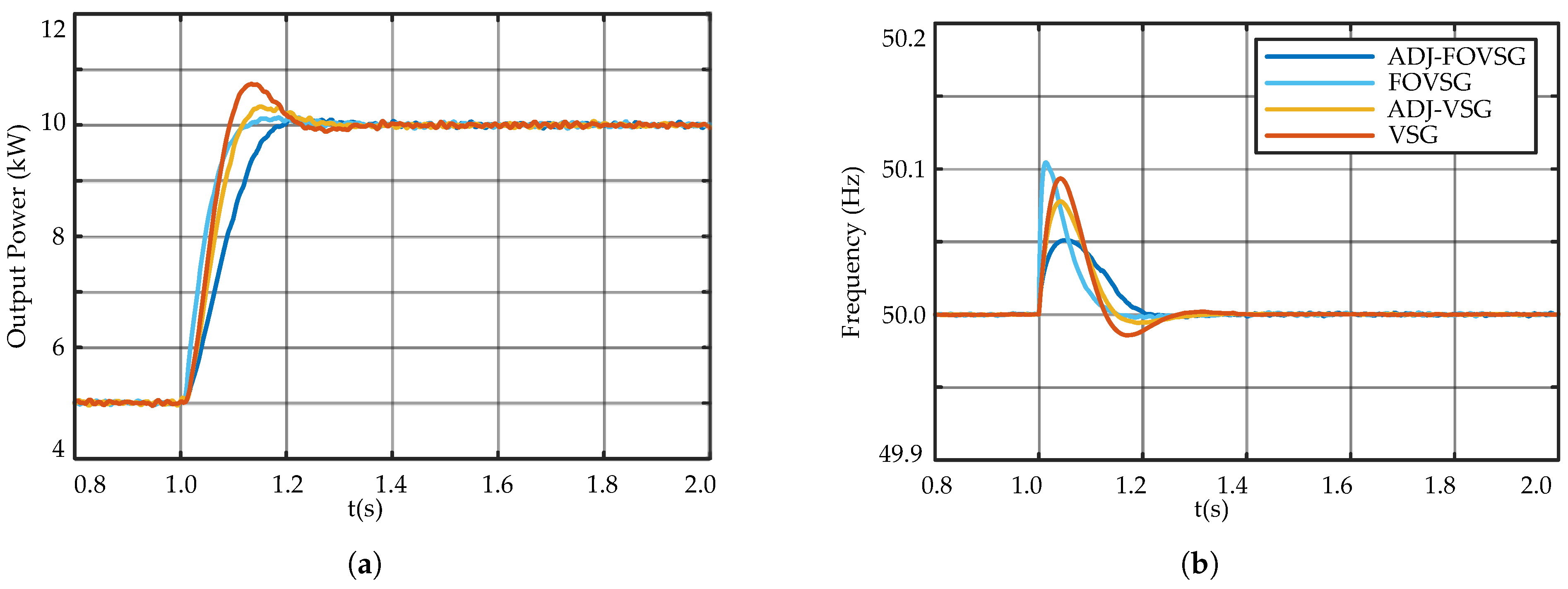
From
Figure 15a, it can be observed that when
undergoes a step change, the active power response under the ADJ-FOVSG control strategy is significantly faster, with the shortest settling time of only 0.19 s and no noticeable power overshoot. In contrast, the conventional VSG has a longer response time (0.29 s) and a 7.36% power overshoot, indicating poorer regulation.
Figure 15b compares the frequency responses of different control strategies. The results show that ADJ-FOVSG achieves smoother frequency variations and better transient performance, with a peak deviation of only 0.059 Hz. In contrast, FOVSG has a larger deviation (0.105 Hz). This confirms that adding an adaptive regulation mechanism to FOVSG improves frequency stability and robustness during disturbances.
Table 8 compares the performance metrics of all control strategies. When
changes, ADJ-FOVSG effectively suppresses power overshoot. Compared to conventional VSG, ADJ-FOVSG reduces power regulation time by 34.5% and peak frequency deviation by 37.2%. Compared to the adaptive rotational inertia control in traditional VSG, ADJ-FOVSG improves regulation time by about 24% and reduces peak frequency deviation by roughly 24.4%.
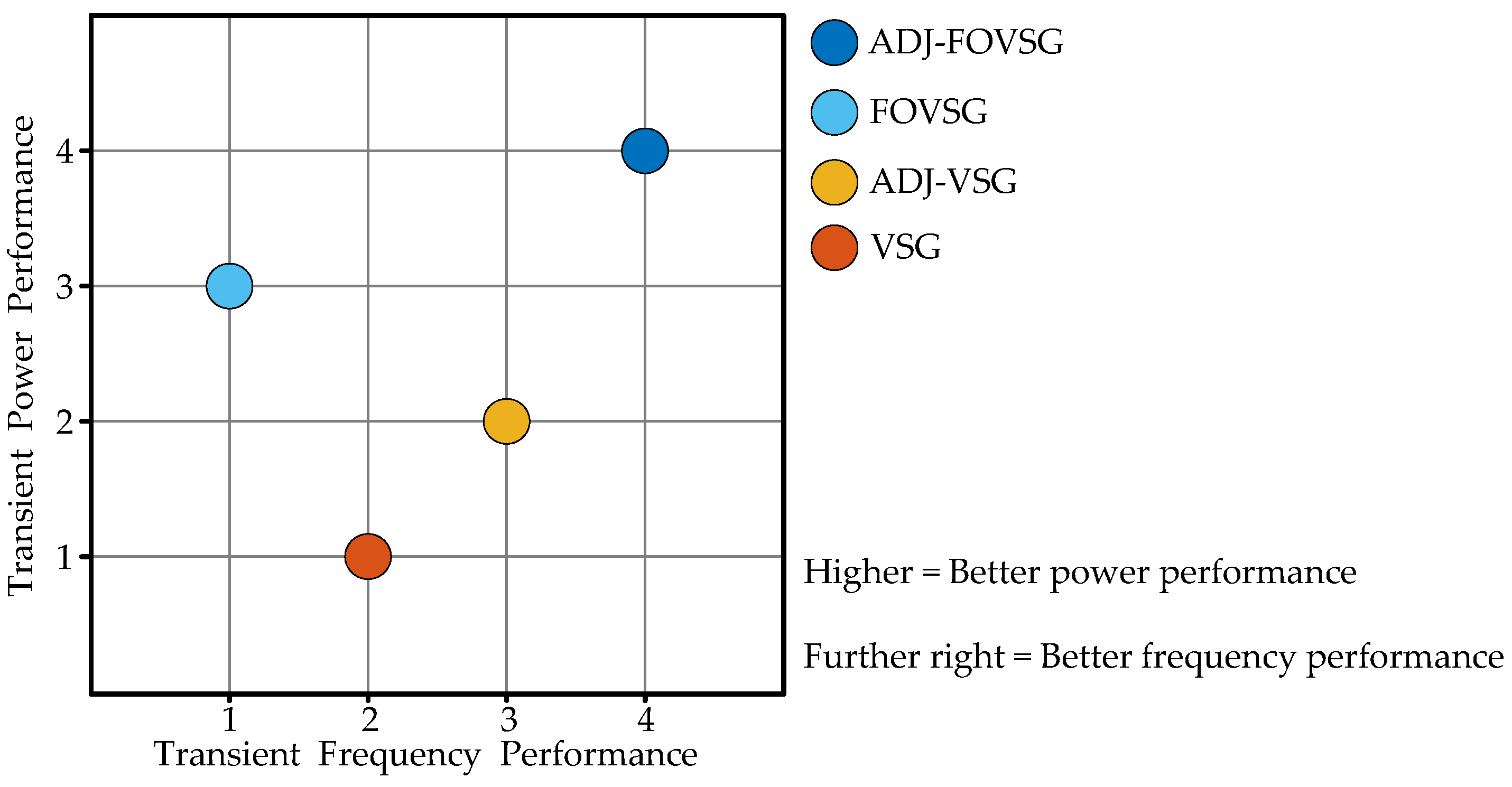
For systematic evaluation and comparison of the four control strategies’ transient performance, their results are classified into four levels in
Figure 16, where higher positions indicate better power performance (less overshoot), and further right positions reflect better frequency performance (smaller rate of change).
Figure 16 presents the transient performance rankings: power performance follows ADJ-FOVSG > FOVSG > ADJ-VSG > VSG, and frequency performance follows the order ADJ-FOVSG > ADJ-VSG > VSG > FOVSG. ADJ-FOVSG clearly achieves the best overall performance, combining minimal power overshoot with reduced frequency rate of change, which confirms its superior transient characteristics. Comparatively, traditional VSG has the poorest transient power performance, and FOVSG demonstrates the weakest transient frequency response.
Figure 17 shows the variation of the rotational inertia
J under the ADJ-FOVSG and ADJ-VSG control strategies. When a step disturbance occurs in
, causing
and
to exceed predefined thresholds, the adaptive control mechanism is triggered to adjust the rotational inertia and suppress frequency fluctuations. Although both strategies share the same adaptive inertia adjustment mechanism, ADJ-FOVSG exhibits superior transient performance in frequency and power regulation, as shown in
Figure 15, while
Figure 17 indicates that it also results in a faster and greater increase in inertia during the transient process. The observed larger and faster
J increases in ADJ-FOVSG are intrinsic to the FOVSG architecture, which necessitates greater inertia modulation to counteract rapid frequency deviations. The FOVSG control structure is more sensitive to frequency variations and therefore more readily triggers inertia ramp-up during transients.
Figure 18 shows the Phase A line current waveforms under four different control strategies. With ADJ-FOVSG control, the current rises monotonically to its rated 21.44 A without overshoot. In contrast, the other three control strategies show varying degrees of overshoot, with the current briefly exceeding the rated value before gradually stabilizing. To further assess the quality of the output current during the transient process, the THD for each cycle is calculated. The THD variations of the phase A line current for the four different control strategies are shown in
Figure 19. As seen in the THD variation waveform, both before the disturbance and after the transient process ends, the THD values for all control strategies remain low, indicating minimal impact on the current under steady-state conditions. During the transient period, the THD values for all strategies remain below 4%, with the ADJ-FOVSG strategy achieving the lowest maximum THD of 1.78%. This is followed by FOVSG (3.91%), VSG (2.99%), and ADJ-VSG (2.45%). These results show that the ADJ-FOVSG control strategy not only stabilizes the current response but also effectively suppresses harmonic distortion, outperforming the other strategies.
In conclusion, the introduction of adjustable parameter in FOVSG provides enhanced flexibility in inertial response compared to VSG. The integration of adaptive J control into FOVSG enables dynamic inertia adjustment according to and variations during disturbances, leading to improved transient performance. By incorporating adaptive control into the FOVSG, the system can dynamically adjust J based on variations in and during disturbances, thereby enhancing transient performance. Simulation results verify that the ADJ-FOVSG surpasses ADJ-VSG, FOVSG, and VSG in transient response time, power overshoot suppression, frequency stability maintenance, and output current quality, proving its effectiveness.
6. Discussion
This paper presents a control scheme for fractional-order LC three-phase inverters, combining fractional-order virtual synchronous generator control with adaptive rotational inertia optimization. Theoretical analysis and simulation results demonstrate the scheme’s effectiveness in enhancing system stability, dynamic response, and robustness. However, despite achieving relatively ideal results, there are still challenges and limitations in practical applications. Therefore, this section will provide an in-depth discussion of the advantages and disadvantages of the proposed control strategies, challenges in hardware implementation and limitations of the study and future research directions.
- (1)
Summary of the advantages and disadvantages of the control strategies.
For a clear comparison of control method characteristics,
Table 9 summarizes the advantages and disadvantages of all four control strategies.
- (2)
Challenges in hardware implementation.
In this paper, fractional-order inductors and capacitors are simulated using the Oustaloup filter to approximate their impedance functions, combined with a passive network to model their external characteristics. Although this method is feasible in terms of hardware implementation, achieving an accurate approximation of fractional-order characteristics depends on the precise combination and matching of basic components such as resistors, capacitors, and inductors. Additionally, changing the order of the fractional-order elements requires a complete network redesign. This also results in higher costs and larger physical dimensions. Developing fractional-order inductors and capacitors with simple structures and stable characteristics at the material level would greatly simplify hardware implementation.
Furthermore, as fractional-order calculus is inherently infinite-dimensional, practical implementations must use finite-dimensional approximations. The approximation accuracy depends critically on the chosen frequency range and order settings, making stable full-spectrum performance challenging to maintain. The controller’s performance depends not only on the approximation algorithm but also on the digital processor’s computational power, significantly complicating practical implementation.
- (3)
Limitations of the study and future research directions.
This study validates the control strategies through theoretical analysis and numerical simulations. However, the lack of experimental verification limits the assessment of the controller’s performance under realistic grid conditions. Future work will focus on hardware-in-the-loop (HIL) testing to evaluate practical performance.
Although proposing a fractional-order LC inverter dual-loop control structure, this work lacks systematic comparison with conventional structures. Future research should investigate this strategy independently, examining how different-order decoupling configurations affect dynamic response and steady-state performance under fractional-order modeling, to optimize control structures.
While this study has demonstrated the effectiveness of the proposed control strategy under current disturbance conditions, the impact of uncertainties from actual external disturbances has not been considered. Future research could further investigate the system’s robustness against different disturbance types, particularly examining how variations in magnitude and duration affect performance, thereby enhancing the control strategy’s practicality and adaptability.
This study implements fractional-order operators using the FOTF toolbox. As operator accuracy critically impacts controller performance, developing more precise and robust approximation methods should enhance dynamic behavior and numerical stability.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}