1. Introduction
Physical Asset Management (PAM) is a critical aspect of modern industrial operations, as it involves the maintenance and optimization of system equipment to ensure their reliability, availability, and safety. As part of PAM, the Proportional Hazards Model (PHM) focuses on predicting the failure risk of assets based on their current condition and historical data. With PHM, it is possible to estimate conditional reliability functions and remaining useful life (RUL). Accurate RUL prediction can help reduce downtime, maintenance costs, and safety risks and improve the overall efficiency of industrial operations.
Predictive maintenance stands out as particularly interesting within the field of maintenance policies. It aims to determine the optimal intervention time of equipment, thereby minimizing the likelihood of failure through diverse techniques. A noteworthy approach within predictive maintenance is Condition-Based Maintenance (CBM), which operates as a prognostic policy by estimating equipment failure rates and reliability using present and anticipated conditions. Hence, the methodology involves continuous monitoring of those vital signs, in which PHM assigns weights to individual conditions, enabling the calculation of the equipment’s failure risk at any given moment.
In recent years, there has been a growing interest in using data-driven approaches and advanced algorithms to improve the accuracy of PHM modeling. In the same way, estimating parameters in PHM models with multiple covariates is challenging due to the log-likelihood function non-convex nature and the high dimensionality of the parameter space. In order to address this challenge, this work proposes a non-conventional methodology that combines non/semi-parametric approaches, such as Random Forest and Genetic Algorithm, to estimate the covariate weights and Weibull parameters in PHM models with multiple vital signs.
Cox’s partial likelihood optimization is usually employed to evaluate the impact of time and conditions on the hazard rate. However, when dealing with parameter estimation involving diverse covariates, the problem may have multiple feasible solutions. Consequently, assessing boundaries and carefully adopting an effective initial value strategy is imperative. Therefore, this paper explores innovative non/semi-parametric approaches to address these issues. Specifically, we integrate IPCRidge to define boundaries and leverage Gradient Boosting and Random Forest to estimate initial covariate weighting values. The proposed methodology is evaluated in a real-world case study in an asset-intensive firm to demonstrate the integration of condition data scaling with diverse orders of magnitude and units.
The rest of this paper is organized as follows.
Section 2 provides a literature review of the existing approaches to PHM and parameter estimation.
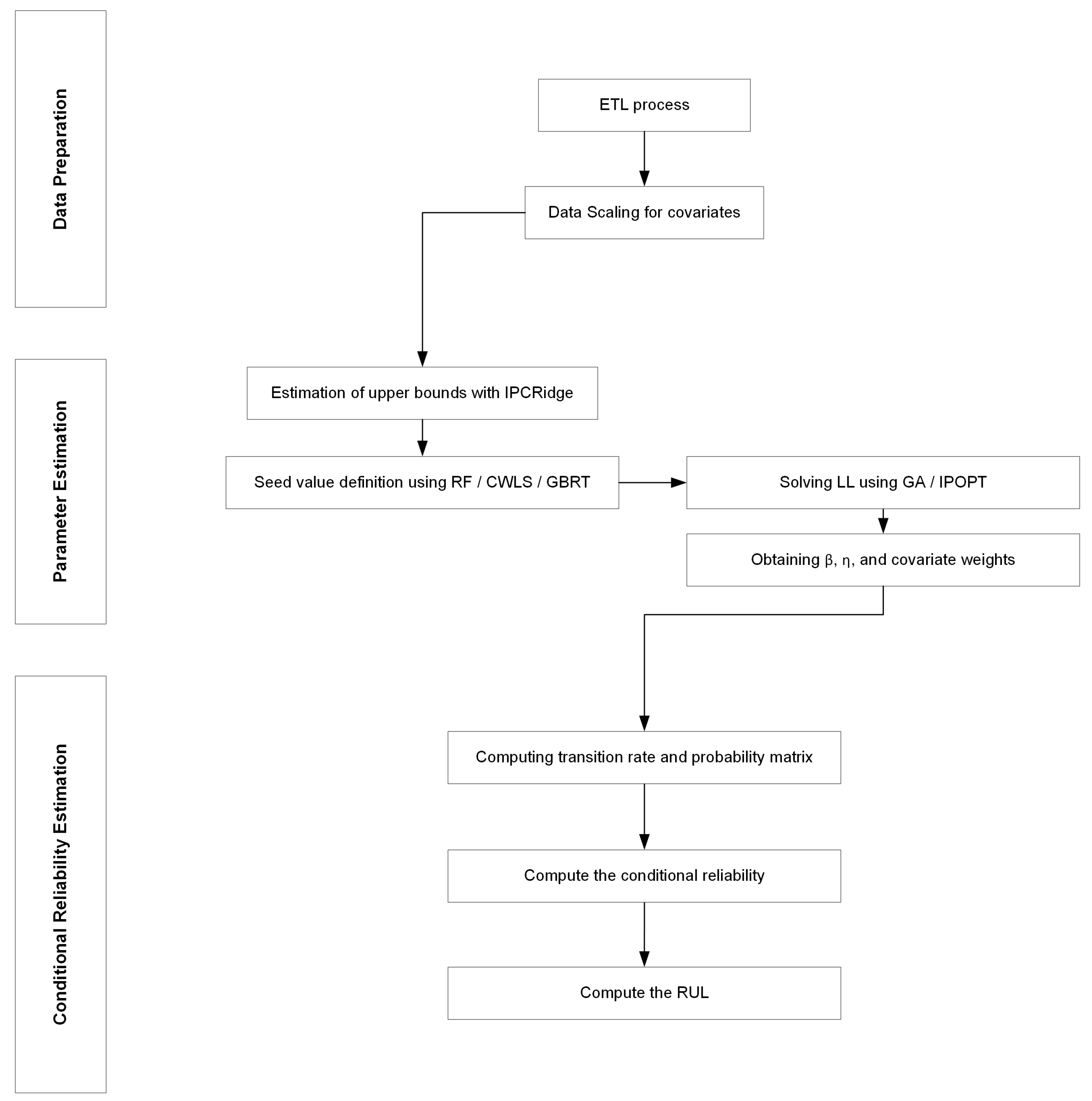
Section 3 describes the proposed methodology in detail, including the data-driven approaches and advanced algorithms used.
Section 4 presents the case study and discusses the results obtained. Finally,
Section 5 concludes the paper and outlines the future research directions.
4. Case Study and Discussion
The study of this paper intends to show a real case example by using the proposed methodology on real data from an electrical distribution company in Chile. An extract of the data set is shown as follows.
Table 1 shows the different columns available in the data set. The first one is the TBF of each sample in hours; the second is the type of intervention (one as preventive and zero as corrective); the “Machine ID” represents the electric transformer’s ID; and the last four columns are the covariates considered in this case study. The electric demand satisfied by the electric transformer is measured in megavolt-ampere (MVA), the internal temperature of the transformer is registered in Celsius degrees (°C), the ethylene (C2H4) in transformer oil is measured as a percentage of gas presence. Finally, the dielectric strength of the transformer oil is measured in (kV). Additionally,
Table 2 shows some relevant statistical indicators for covariate data, such as mean, standard deviation , and quartiles. The selection of these four covariates is based on their data availability. However, it is important to note that the model has the capacity to consider a larger number of covariates, with the possibility of rejecting some during the subsequent covariate weighting step. As shown in
Section 3.3, Weibull parameters are estimated to be used as initial values for the optimization methods. Those starting values are presented in
Table 3.
The next step requires the performance of data scaling; the covariates have different orders of magnitude ( as shown in
Table 2), so, for reasons already explained, it is important to standardize them. Therefore, for the next steps, the types of scaling are considered in parallel in separate ways. For the four covariates considered in this case study, the three alternatives of starting values estimations are presented as shown in
Section 3.2; the hyper-parameter tunning of this algorithm is made using
GridSearchCV of the
®Python library
Scikit-learn.
Table 4 shows that the proto-weight estimations have orders of magnitude different from the data, so scaling is necessary. It is also possible to observe, for example, that the Gradient Boosting method CWLS choose Covariate 3 first and Covariate 4 last. Hence, they are the least and most important, respectively, to explain the behavior of the TBF. Moreover, RF is more impartial in assigning importance to each covariate based on its voting. For the case of the “NS” method, the proto-weights are scaled using the MinMax method between zero and three, which is arbitrary and must be considered a case with expert knowledge influence. Therefore, the starting weights are made with an intuitive approach and are easy to interpret. The scaled weights, which are used as starting values, are presented in
Table 5.
As the lower bounds of the covariate weights are zero, two ways are considered for the upper bounds: the IPCRidge method and non-upper bounds. This approach aims to identify which part is more important for optimization: the boundaries or the starting value. The boundaries calculated are shown in
Table 6 and
Table 7. The upper bounds for NS are more relaxed than the others; this method does not standardize the magnitude orders of all the covariates as the other methods.
Then, it is possible to put the optimization algorithms in action. The results obtained for the IPOPT approach are shown in
Table 8, where the scaler method that achieves the lowest
values on average is the Min–Max(0,1) method. However, the NS method manages to obtain feasible solutions in all its scenarios. The Min–Max(0,2) method achieves the lowest
value with GBRT and upper bounds, but its solutions are worse or infeasible in the rest. Regarding the latter, the estimated values of
and
show a wear-out stage in the asset life cycle, which is why
, in turn, explains the order of magnitude of
. The method decreases the value of
; hence, its estimation must be less than the value previously shown in
Table 3. Therefore, the MinMax(0,2) method reaches just one feasible solution, using GBRT with upper bounds. CWLS is the seed weighting method that becomes more feasible solutions in all its scenarios compared to the other methods, so it is the most consistent. The MinMax(0,2) method obtains
with orders of magnitude that escape the rest of the solutions and only obtains one feasible solution; it is the least consistent for IPOPT. The NS method (with expert knowledge) is the most consistent for the same reasons.
In
Table 9, it can be seen that there is little difference in the decision of the method for initial weight estimation and the estimated values of covariate weights. The scaler method has more importance for the value in estimating weights than the method of starting weight. For MinMax(0,2), there is more variation, but it could be explained because of the poor consistency of this scaling method. Also, the weights change when the scaler changes; the covariate weight with more variation is Dielectric Strength (p4) and Internal Temperature (p2), which are the covariates with the higher orders of magnitude of all (see
Table 2). Nevertheless, there is not much difference between the Min–Max scaler methods for these two covariates (taking into account the consistency of the Min–Max(0,2) method); the main difference occurs between NS and Min–Max methods.
For GA, the mating probability is set to 1, the mutation rate is equal to , the mutation of each value within the offspring, as it said before, changes applying Gaussian additive mutation with a mean equals to 0, standard deviation equal to 1 and independent probability for each value to be mutated equal to . Finally, the population size is 500 individuals, and 1000 generations are simulated in this study for each iteration. Therefore, the following results are obtained.
From
Table 10, it is possible to observe a higher consistency in all the values achieved no matter the chosen method. Min–Max(0,1) obtains the lowest values of
. GA obtains a different
than IPOPT but is compensated with lower values of
, so the orders of magnitude of
do not change between optimization algorithms. Also,
stills are greater than one. The results of the Min–Max(0,2) method are sensitive to the presence or absence of upper bounds, thus reaffirming the inconsistency of the method when changing the optimization algorithm and the importance of the upper bounds to obtain lower
values in a smaller amount of time. The choice of the method to obtain the initial weights is not important enough to affect the obtained results.
In
Table 11, similar behavior to that achieved by IPOPT is observed ( as shown in
Table 9). Nevertheless, GA shows a better consistency in the weights estimated for all the covariates. The Min–Max(0,2) method still presents poor consistency through the iterations, in the same covariates as the IPOPT case, and shows sensibility to the existence (or not) of upper bounds. The NS method still has a greater difference in orders of magnitude of the weights of Covariates 2 and 4 compared to the values estimated using the Min–Max methods.
Table 12 shows a lower mean computational cost reached by Min–Max methods against the non-scaling alternative. So, it is easier for solver algorithms to deal with scaled data than to handle covariate data with a simple increasing transformation (NS).
In addition, for goodness-of-fit purposes, the
p-values for each parameter estimated through both solver strategies are calculated based on 95% profile likelihood confidence intervals and Wald test using the Python library
VeMoMoTo. The
p-values for the GA and IPOPT cases are shown in
Table 13 and
Table 14, respectively.
Note that
means that the results are statistically significant, rejecting the null hypothesis.
Table 8 and
Table 10 show that both optimization algorithms reach feasible solutions in most of the simulated iterations. The iterations that do not reach a feasible solution have the absence of an upper bound as a common factor. In addition, from
Table 12, it is possible to appreciate that GA, on average, requires much more computational cost than IPOPT but manages to always reach feasible solutions, unlike IPOPT. In almost all cases (with a feasible solution), the shortest times are achieved when upper bounds are considered. Therefore, the upper bounds have an impact to consider in the optimization methods, which is higher in IPOPT.
The initial value method for the weights that presents the highest robustness is CWLS; in the least consistent optimization algorithm (IPOPT), it manages to obtain feasible solutions without upper bounds in most cases; this could indicate that CWLS is closer to the real covariate weights than the other methods. The results of IPOPT (
Table 8) reach lower values of
than those of GA (
Table 10) in all cases (with a feasible solution).
For illustrative purposes, taking as an example the solutions from IPOPT optimization with the NS method, CWLS, and upper bounds, it is possible to estimate the conditional reliability functions, as explained in
Section 3.5. So, the generated transition probability matrix is shown below.
Therefore, three states are generated using the proposed method in [
3], and the
Table 15 matrix is calculated. With this matrix, it is possible to obtain conditional reliability for each state (with
and
), as can be seen in
Figure 2.
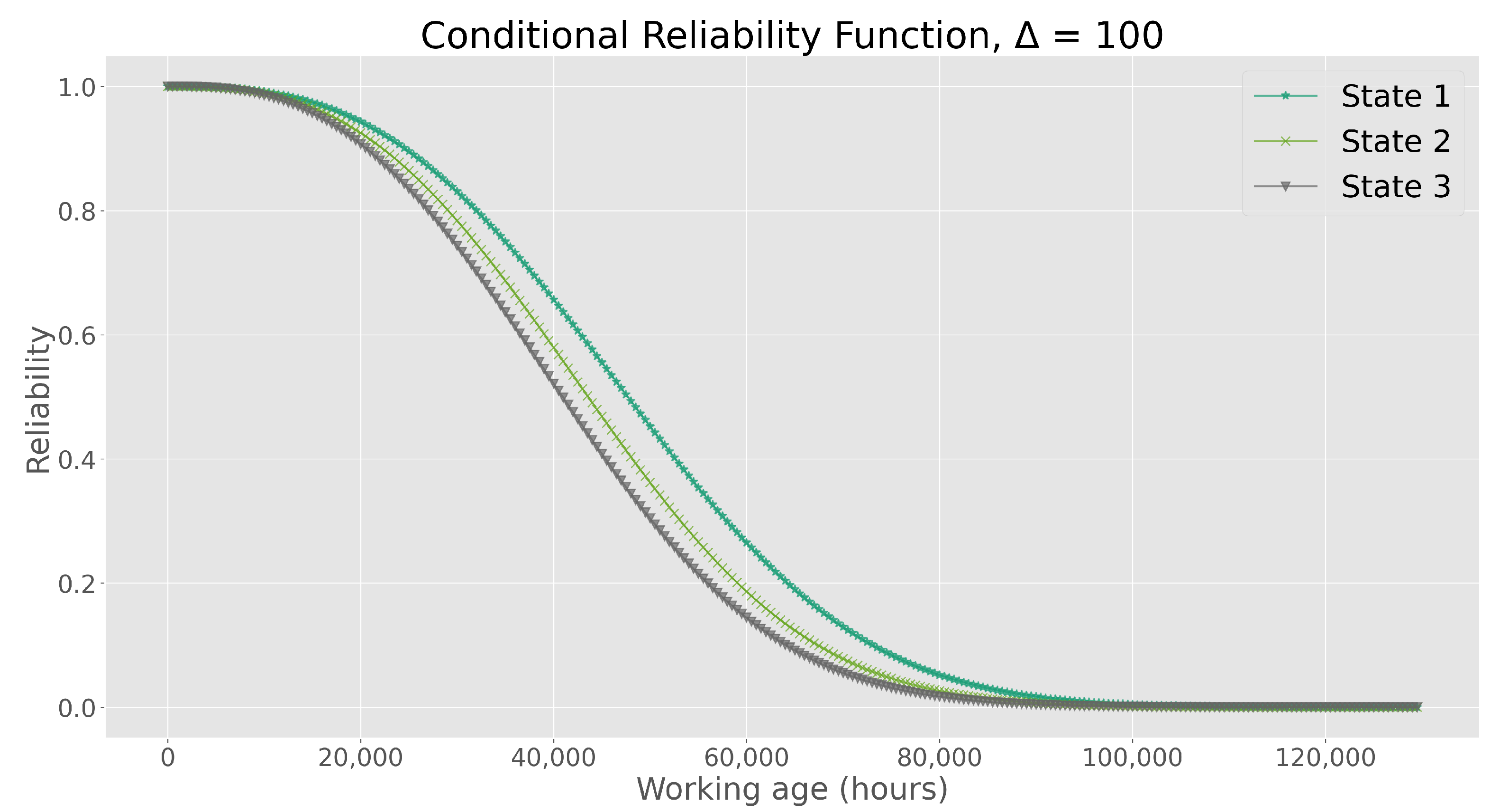
Then,
Figure 2 shows the corresponding conditional reliability functions using the probability transition matrices as input to the aforementioned product property method. The reliability behavior for each state is similar. Consequently, State 1 corresponds to the state where the asset exhibits the highest reliability, followed by State 2 and then State 3, which present the lowest reliability over time.
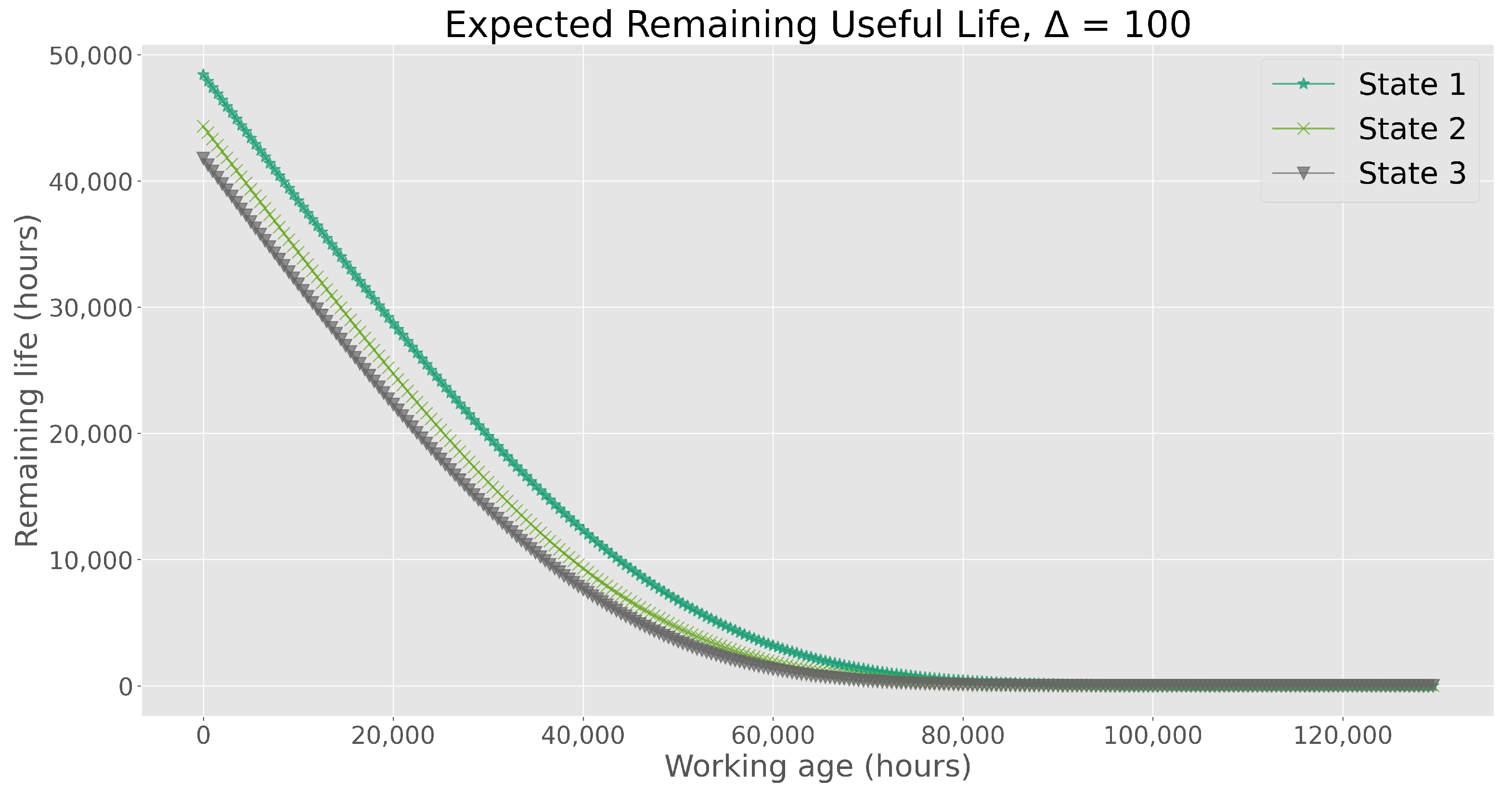
Figure 3 illustrates the remaining useful life (RUL) by incorporating the estimated conditional reliability functions as inputs for predictive analysis. This representation considers the progression of clustered covariate data across various states. Unsurprisingly, State 1 emerges as the optimal condition, characterized by a gradual decline in RUL from its peak, indicative of a smoother degradation process. Conversely, State 3 is identified as the least favorable clustered condition, exhibiting the most pronounced and aggressive deterioration throughout its operational lifespan.
With respect to the other component of the Predictive PHM Model (Equation (
15)), i.e., the contribution of age to the risk rate, values of
and
align with their interpretation in conditional reliability and Remaining Useful Life (RUL), as evidenced in
Figure 2 and
Figure 3. In
Table 8, it is observed that the value of
is greater than one, indicating a stage of wear in the asset’s life cycle. This implies that the studied equipment is aging over the analyzed period. Characteristic life
also aligns with the values of operating time. However, it is interesting to note that in the initial stages of the life cycle, the impact of the clustered condition is slightly more significant than the effect of age; that is, the difference in RUL between states is more noticeable.
In alignment with the PHM model, divergences in Remaining Useful Life (RUL) decrease during the later stages of the asset’s lifespan. This indicates that, over prolonged operational periods, the influence of time becomes more prominent as the overall condition of the asset undergoes significant degradation in advanced operating times.
In summary, the Genetic Algorithm (GA) exhibits greater robustness compared to IPOPT, even though GA falls short of achieving results as optimal as IPOPT concerning log-likelihood values (LL) and computational cost. It is important to notice that LL measures the goodness of fit of a statistical model, but p-values related to 95% confidence intervals for the estimated parameters are calculated as well. Introducing the Kaplan–Meier estimator as an upper bound yields superior results compared to scenarios without upper bounds, establishing it as a valuable technique for upper bound estimation. Additionally, Gradient Boosting with component-wise least squares (CWLS) as the base learner demonstrates robustness in providing reliable initial value estimates across all analyzed iterations. Hence, it is evident that addressing boundaries and employing a thoughtful initial value strategy is crucial for effectively solving this problem. Moreover, the estimation strategy introduced in this study enhances the robustness of Maximum Likelihood Estimation (MLE) optimization in the Weibull Proportional Hazard Model (PHM).
The data scaling methods improve performance of solver algorithms, reaching optimal solutions with less computational efforts. Additionally, the Gradient Boosting approach and the voting method of Random Forest (RF) are easily interpretable due to their intuitive operation. Furthermore, their calculation processes are straightforward to follow. However, the Component-Wise Least Squares (CWLS) method appears to outperform other methods for the considered optimization algorithms. Finally, as an illustrative example of attainable solutions, a transition matrix is calculated. Subsequently, the conditional reliability function and Remaining Useful Life (RUL) are estimated for each state, contributing to enhanced predictive analyses for Condition-Based Maintenance (CBM).
All the presented findings are derived from a real-world dataset within the electric industry, encountering typical data handling challenges such as missing values and non-ideal behaviors of the underlying data distributions—a common occurrence across various fields. To address these challenges, mixed semi/non-parametric algorithms are employed, capable of handling multiple variables with diverse behaviors and units. However, the multi-objective problem-solving approach proposed in this study may need further validation with additional covariates when diverse datasets from other capital-intensive scenarios are presented. Additionally, a dedicated study focusing on challenges related to parameter estimation and the integration of covariate bands calculation is essential to develop a robust and integrated Data-Driven multi-covariate Weibull Proportional Hazard Model (PHM).




{kind=link}
{kind=link}
{kind=link}