
Development and Testing of a Self-Propelled Machine for Combined Potato Harvesting and Residual Plastic Film Retrieval


Abstract
1. Introduction
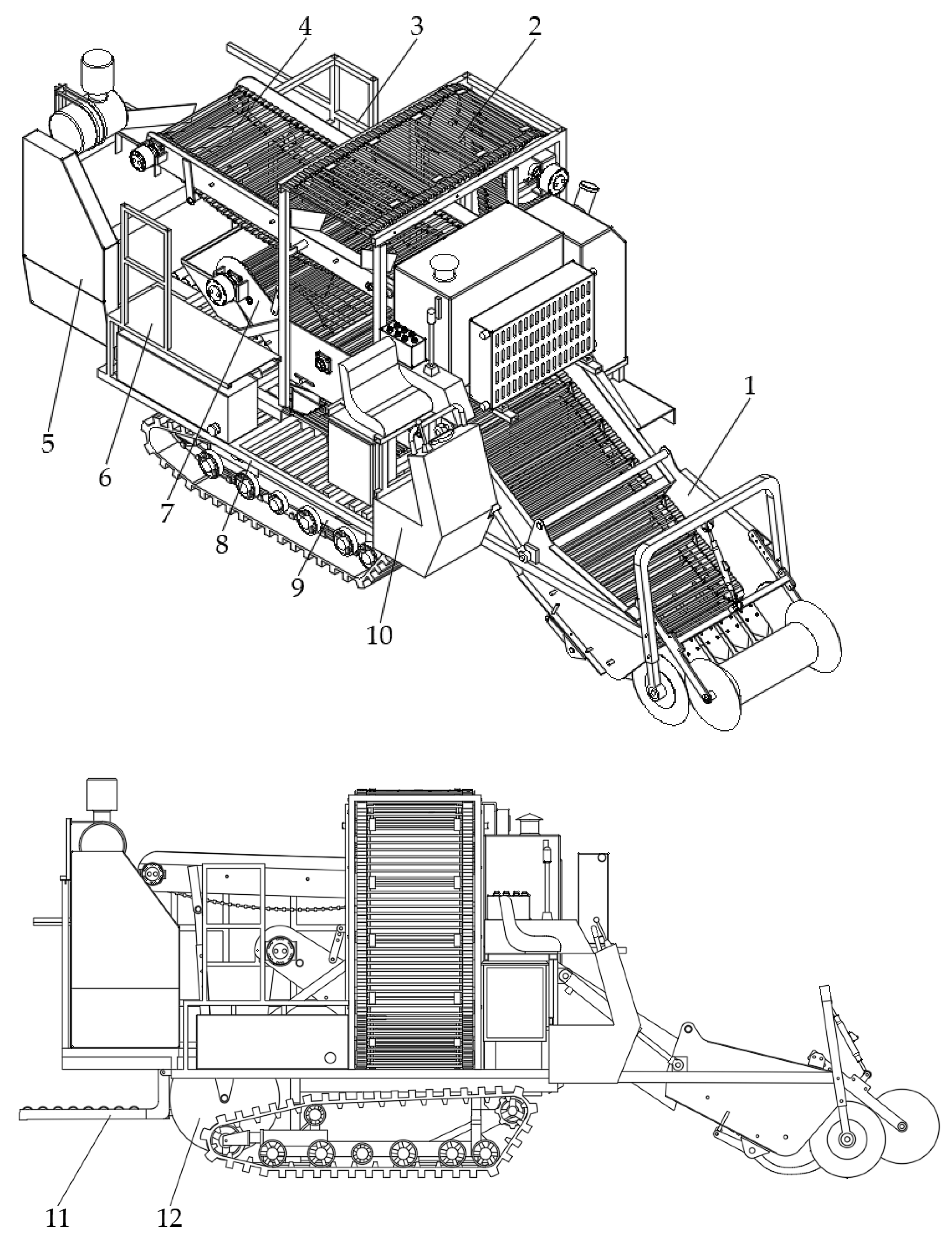
2. General Presentation of the Self-Propelled Machine for Combined Potato Harvesting and Residual Plastic Film Retrieval
3. Design and Analysis of Main Systems of the Self-Propelled Machine for Combined Potato Harvesting and Residual Plastic Film Retrieval
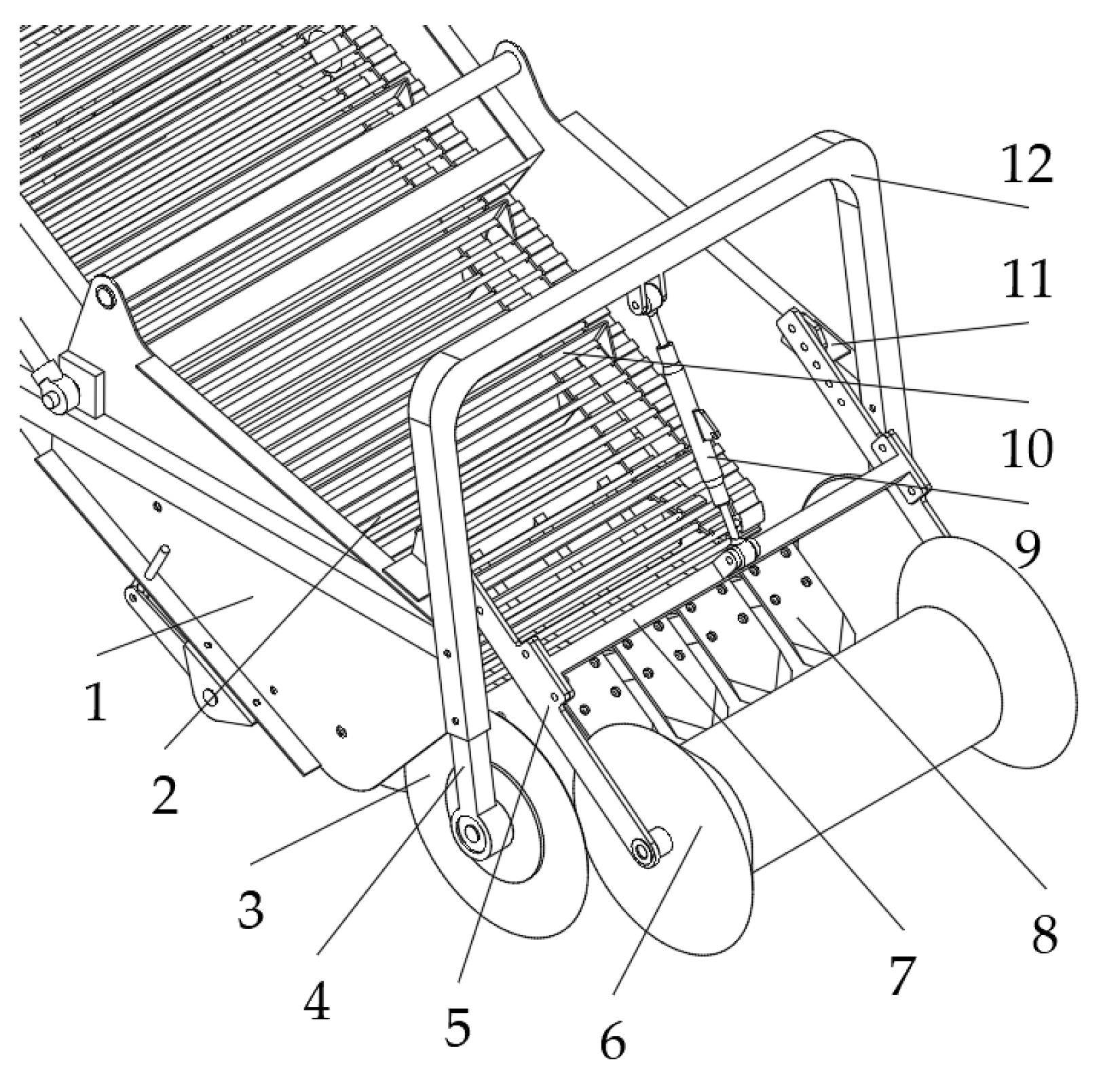
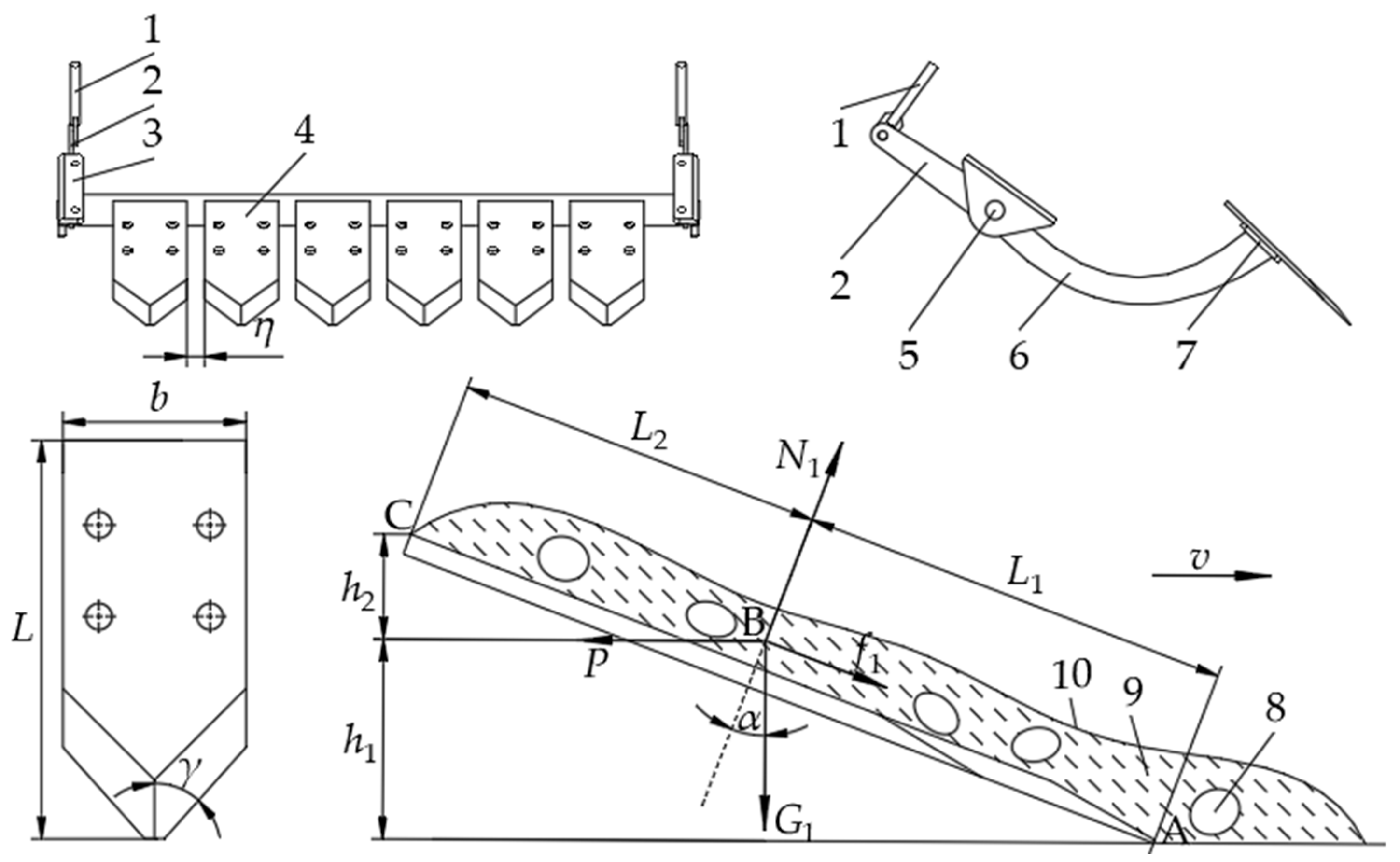
3.1. Digging and Lifting Device
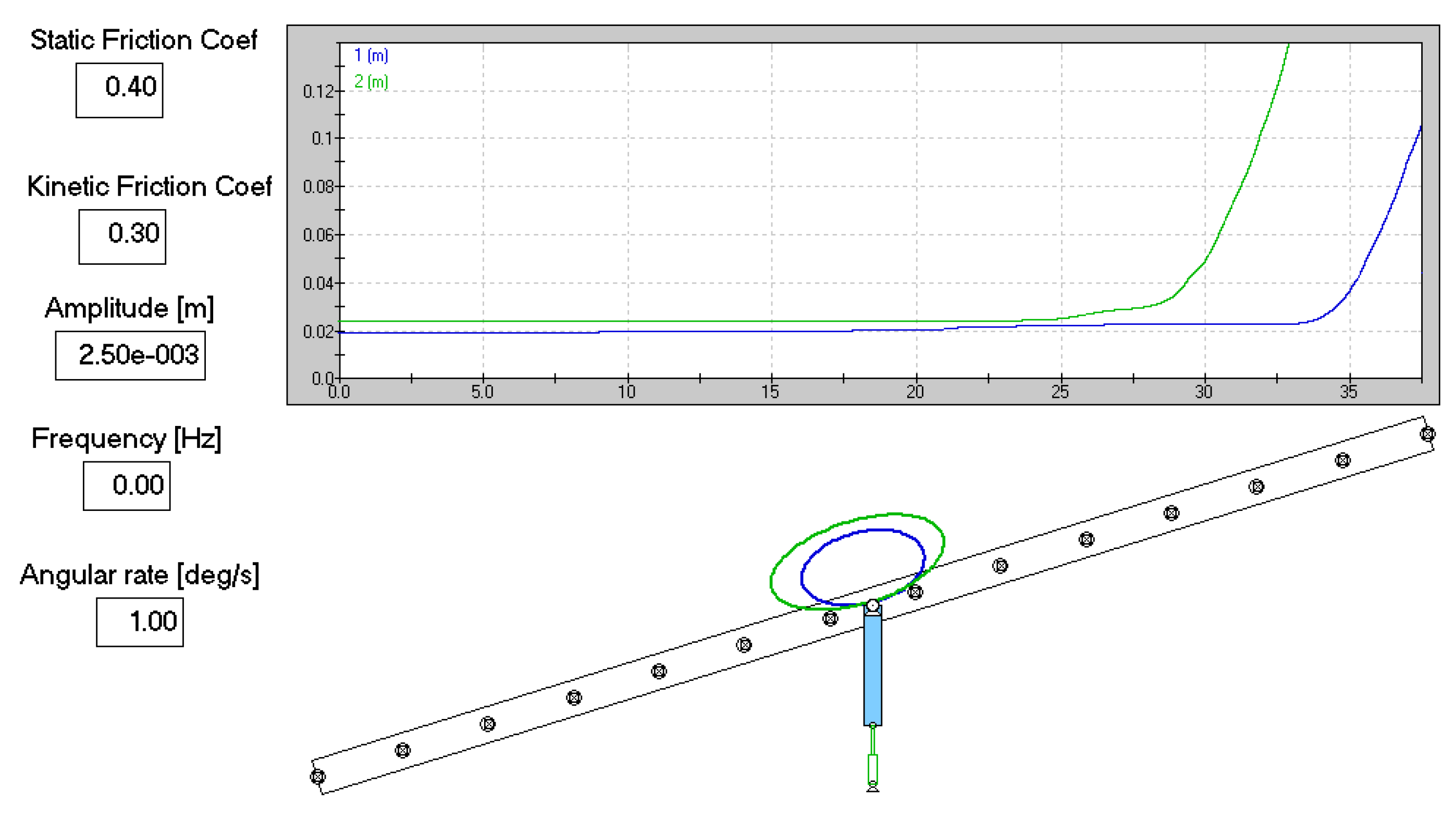
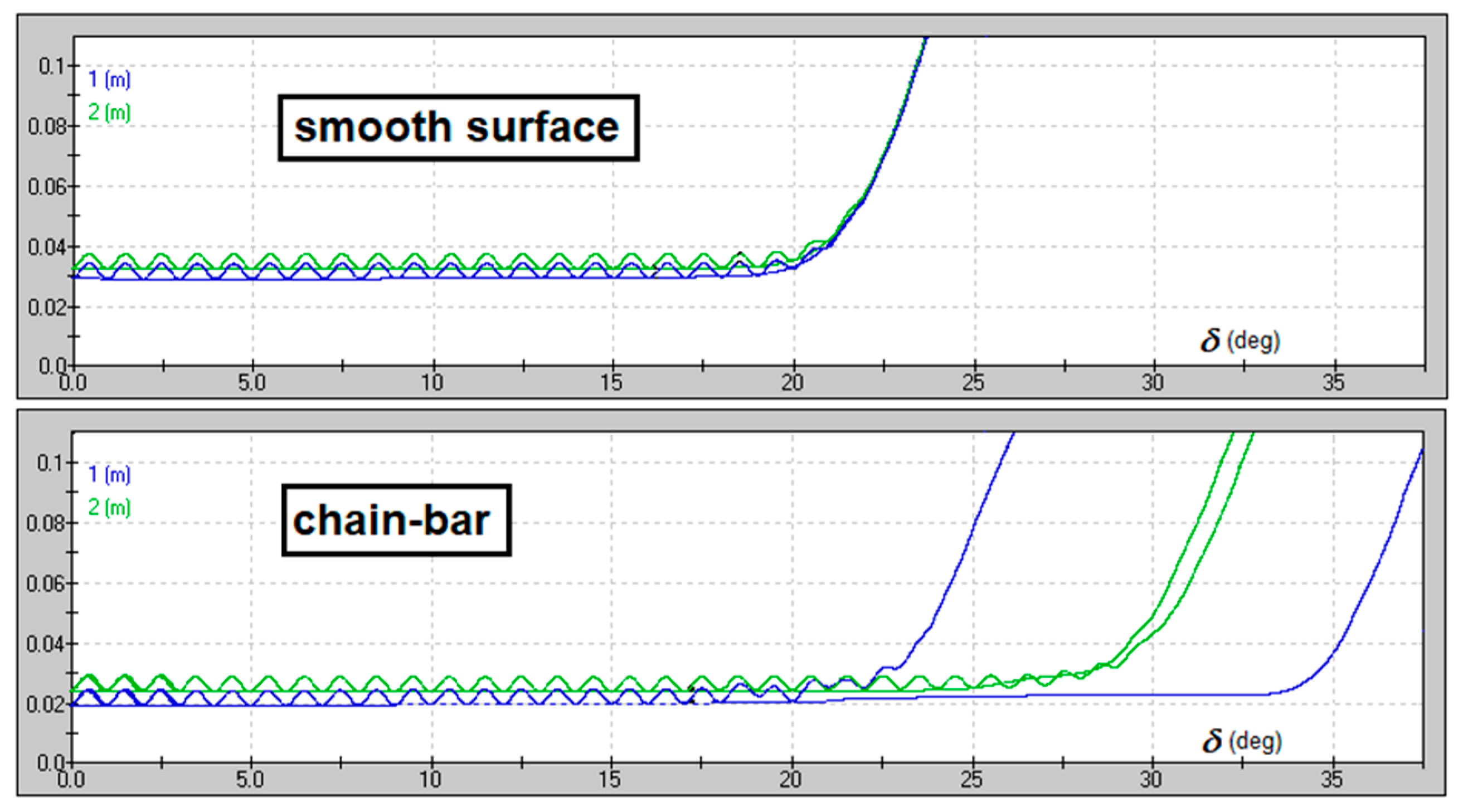
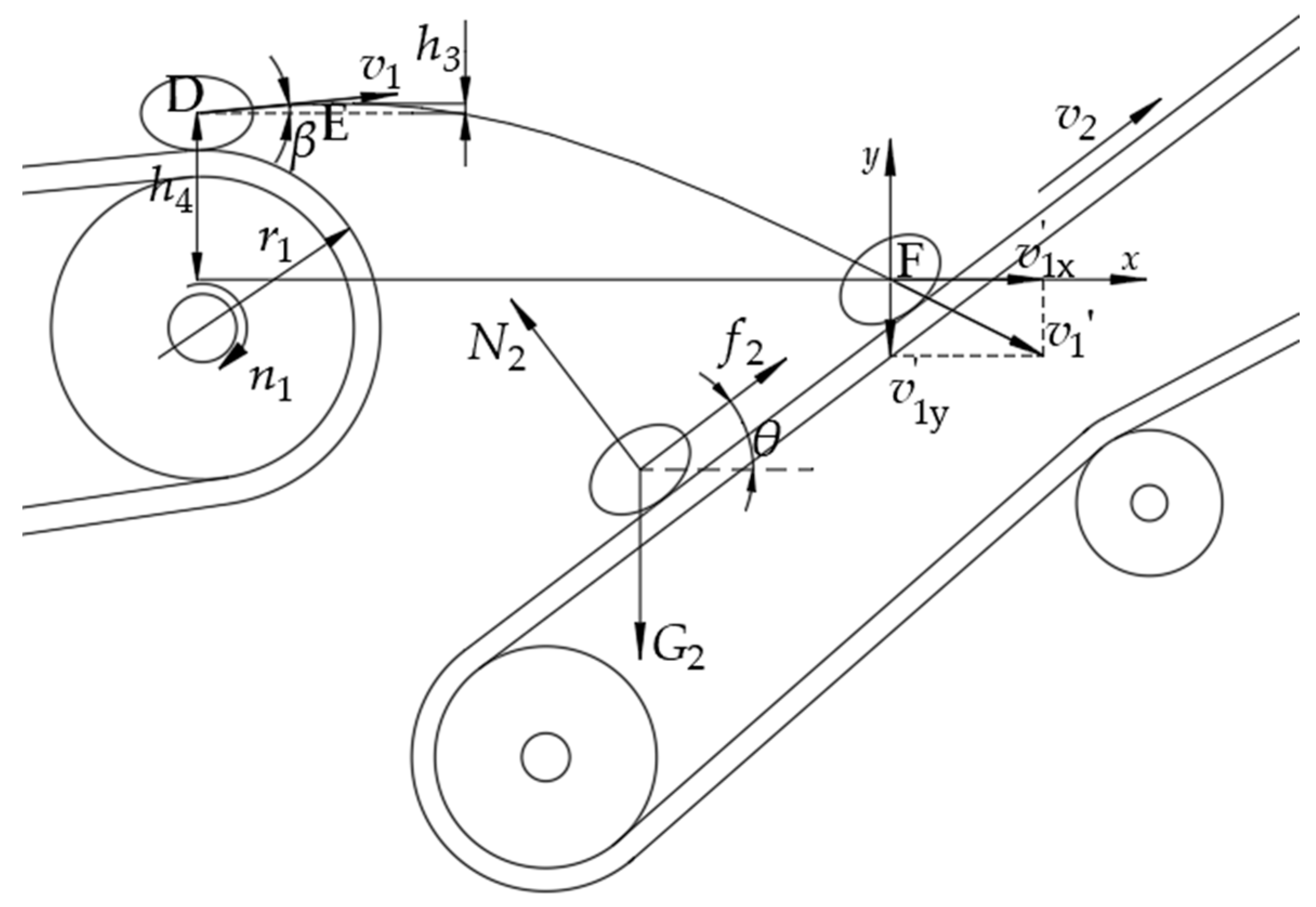
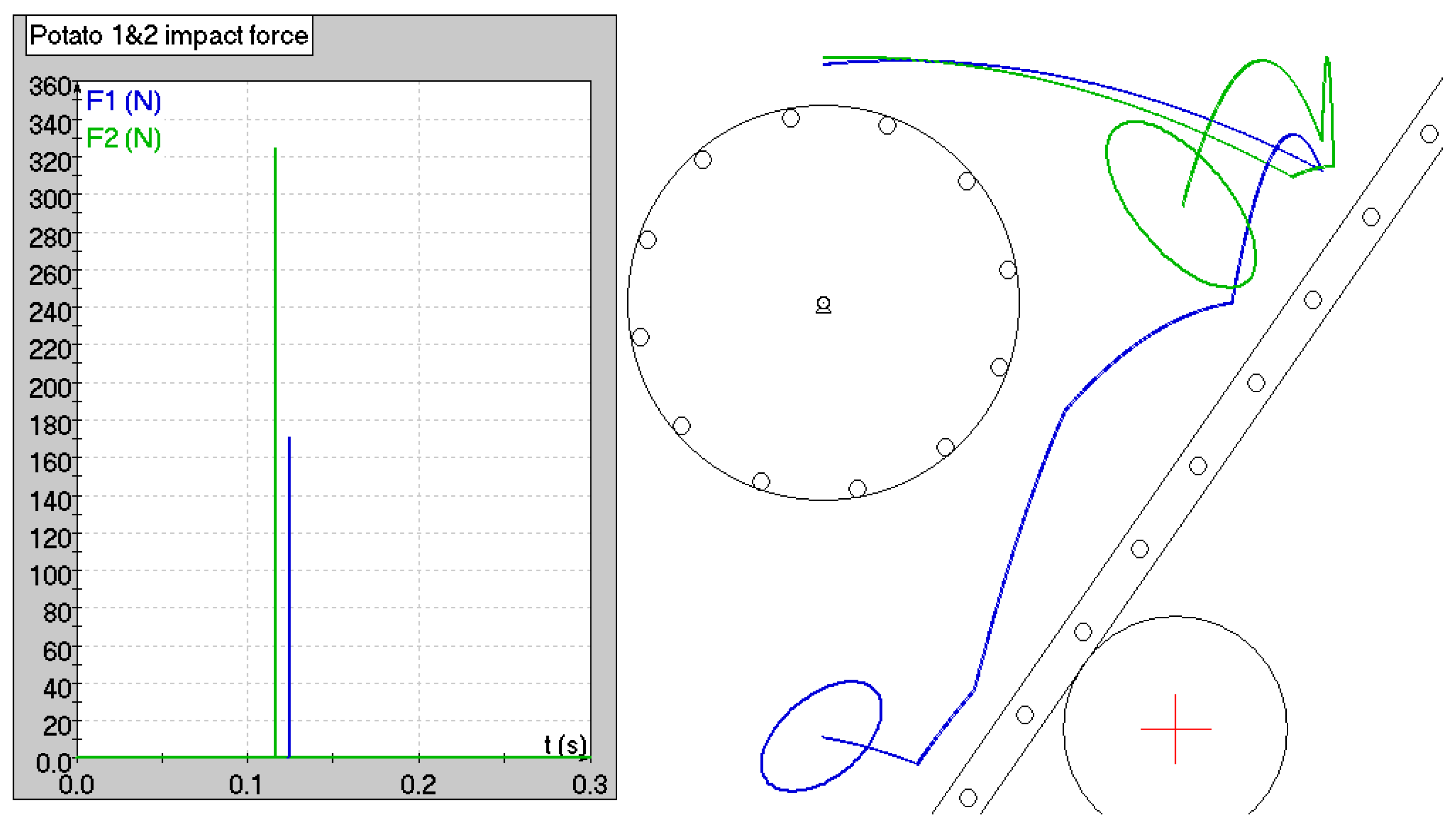
3.2. Design and Analysis of the Potato–Plastic-Film Separation Device
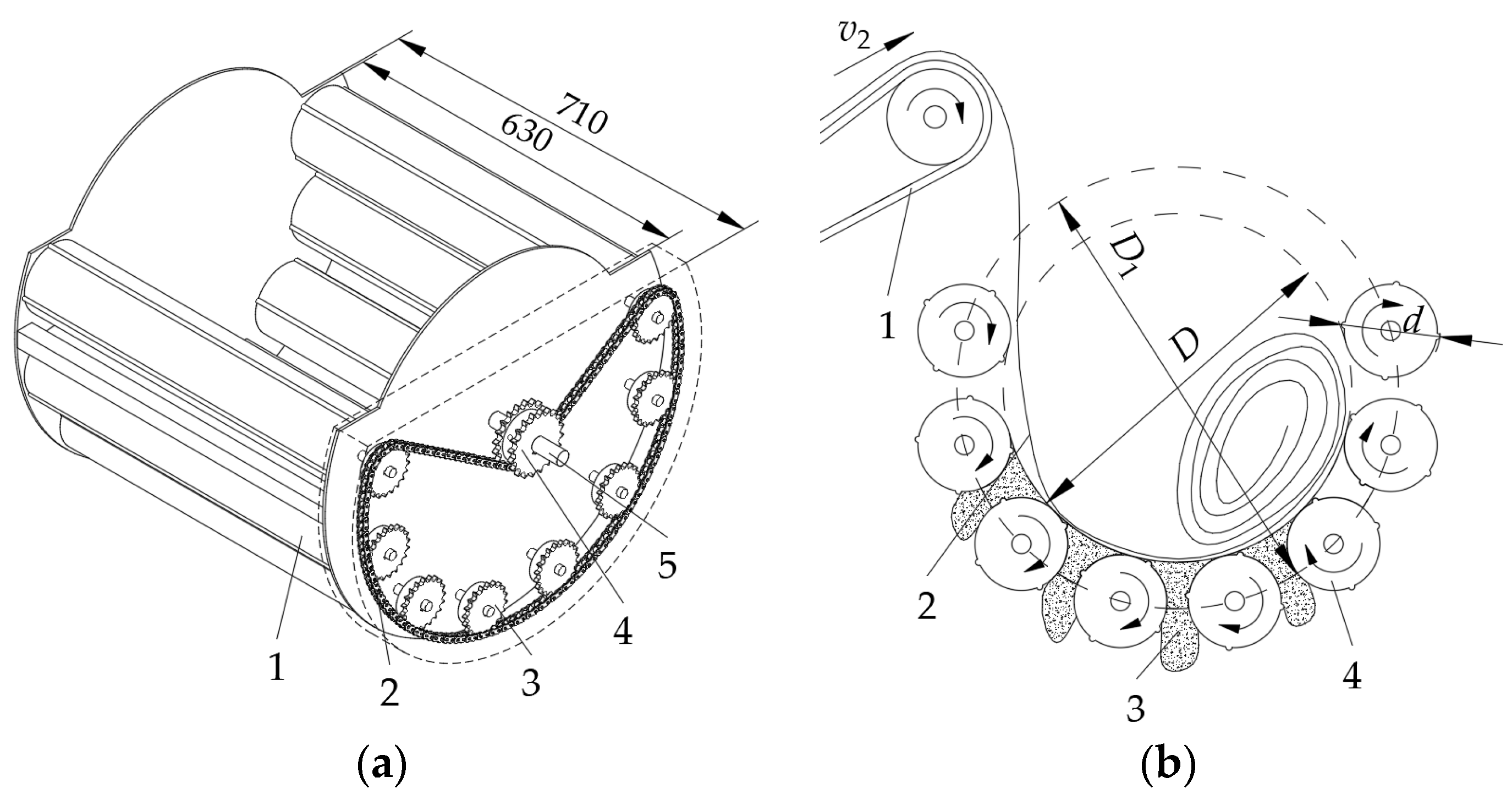
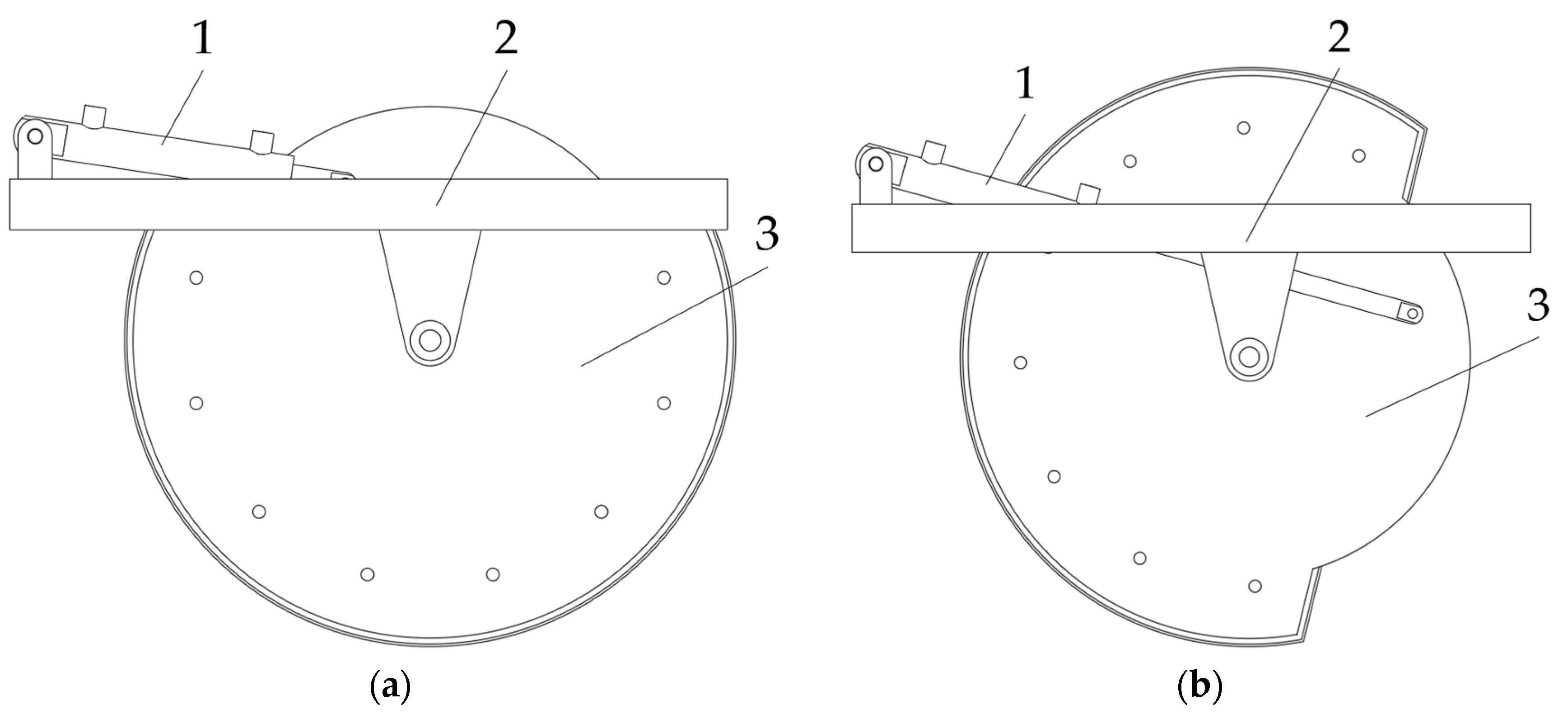
3.3. Design and Analysis of the Residual-Film Collecting and Bundling Device
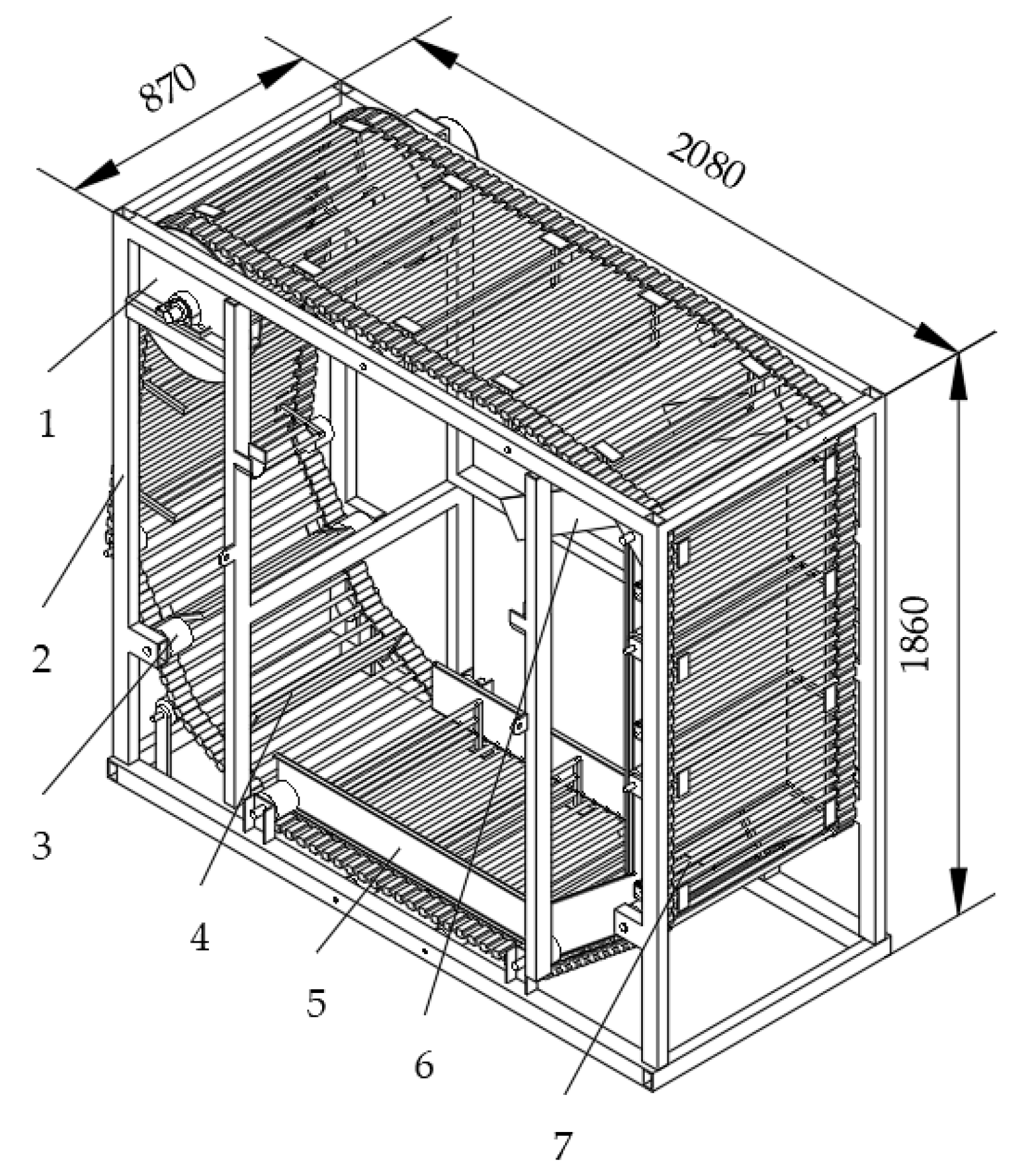
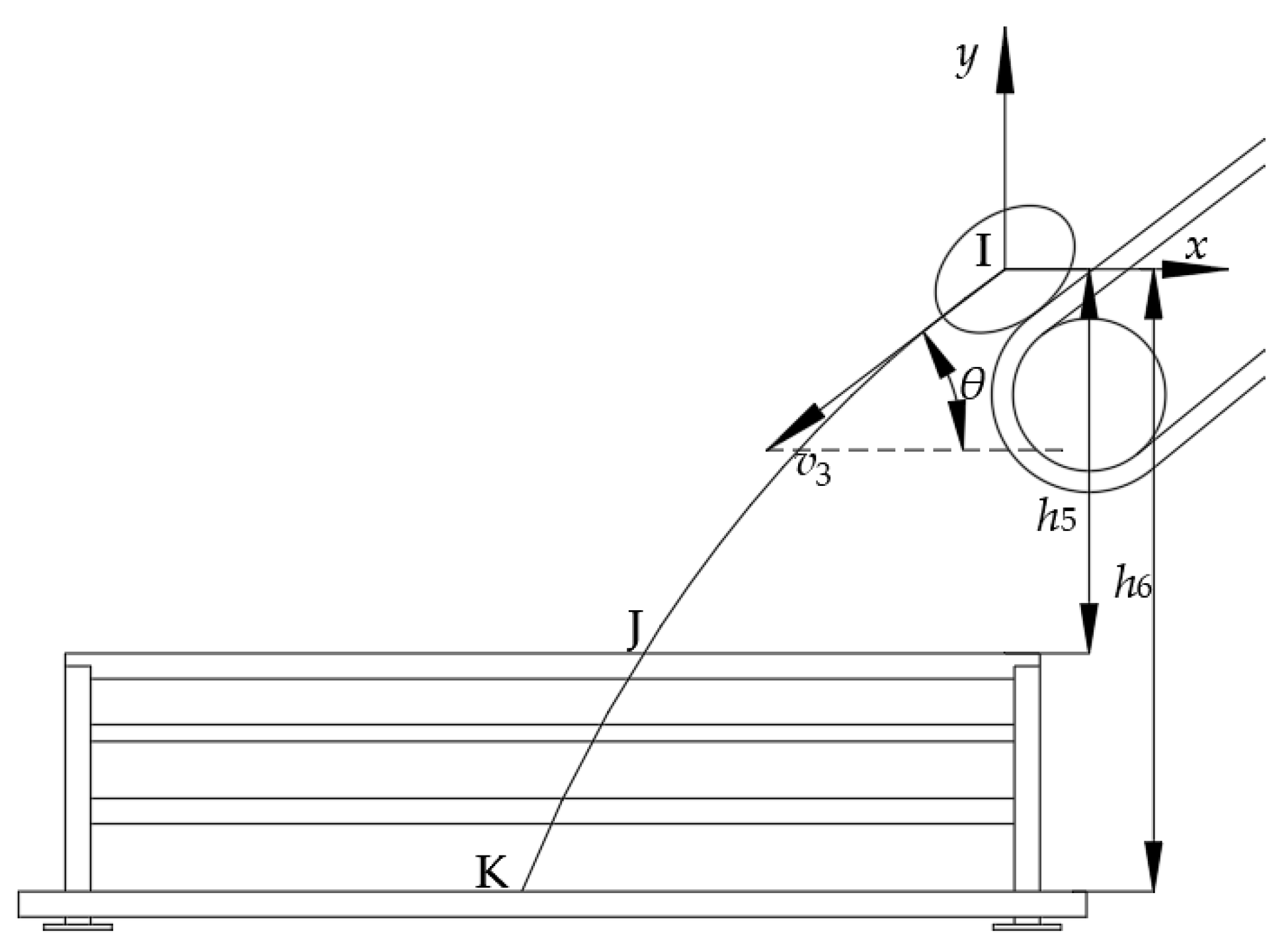
3.4. Design and Analysis of the Circulating and Lifting Device
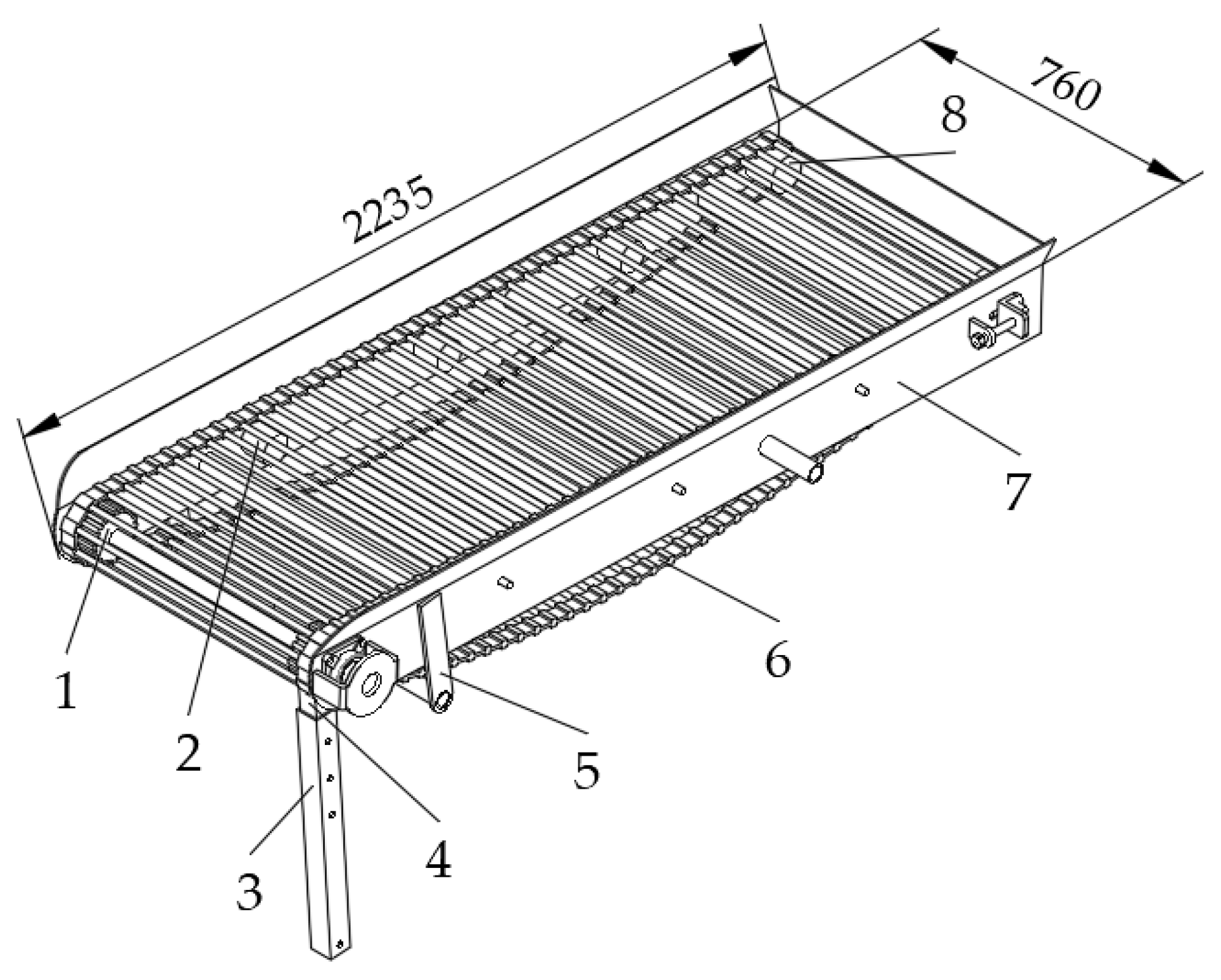
3.5. Design of the Manual Sorting Platform
4. Field Test Method and Test Results
5. Analysis of the Field Test Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wei, Z.; Li, H.; Sun, C.; Li, X.; Liu, W.; Su, G.; Wang, F. Improvement of potato harvester with two segment of vibration and wave separation. Trans. Chin. Soc. Agric. Eng. 2018, 34, 42–52. [Google Scholar]
- Wei, Z.; Li, H.; Su, G.; Sun, C.; Liu, W.; Li, X. Development of potato harvester with buffer type potato-impurity separation sieve. Trans. Chin. Soc. Agric. Eng. 2019, 35, 1–11. [Google Scholar]
- Wang, H.; Zhang, Z.; Issa, I.I.M.; Xie, K.; EL-Kolaly, W.; Cao, Q. Design and experiment of small-sized potato harvester suitable for hilly and mountainous areas. Acta Agric. Zhejiangensis 2021, 33, 724–738. [Google Scholar]
- Kang, H.; Liu, M.; Wang, L.; Wei, M.; Liu, J.; Zhou, J.; Zhang, S. Simulation analysis of separating and conveying device of potato harvester based on EDEM. J. Agric. Mech. Res. 2022, 44, 1–8+16. [Google Scholar]
- China’s Potato Cultivation Area Reached 70 Million Mu Western Main Production Areas Accounted for More than 80%. Available online: www.chinanews.com.cn/cj/2021/10-11/9583694.shtml (accessed on 10 March 2023).
- China’s Potato Planting Area Exceeds 70 Million, Mu. Available online: www.bjnews.com.cn/feature/2020/09/25/772785.html (accessed on 10 March 2023).
- Chen, W.; Zhu, J.; Chen, X.; Yuan, D.; Yao, K.; Peng, Z. The current situation of the development of agricultural mechanization of slope—Farmland in our country. J. Agric. Mech. Res. 2017, 39, 1–5. [Google Scholar]
- Yang, X.; Wei, H.; Zhao, W.; Jiang, Y.; Dai, L.; Huang, X. Design and experiment of 4U-1600 set of pile type potato digger. Trans. Chin. Soc. Agric. Mach. 2020, 51, 83–92. [Google Scholar]
- Liu, C.; Hu, J.; Zhao, S.; Sha, L.; Yu, Z. Research progress on potato harvesting equipments. J. Chin. Agric. Mech. 2019, 40, 31–35, 124. [Google Scholar]
- Dou, Q.; Sun, Y.; Sun, Y.; Shen, J.; Li, Q. Current situation and development of potato harvesting machinery at home and abroad. J. Chin. Agric. Mech. 2019, 40, 206–210. [Google Scholar]
- Yang, H.; Hu, Z.; Wang, B.; Peng, B.; Wang, G. Research progress of harvesting mechanization technology of potato. J. Chin. Agric. Mech. 2019, 40, 27–34. [Google Scholar] [CrossRef]
- Da Cunha, J.P.; Martins, D.H.; Cunha, W.G.D. Operational performance of the mechanized and semi-mechanized potato harvest. Eng. Agríc. 2011, 31, 826–834. [Google Scholar] [CrossRef]
- Wei, Z.; Li, H.; Sun, C.; Li, X.; Su, G.; Liu, W. Design and experiment of potato combined harvester based on multi-stage separation technology. Trans. Chin. Soc. Agric. Mach. 2019, 50, 112+129–140. [Google Scholar]
- Dumitru, I.; Voicea, I.; Găgeanu, I.; Cujbescu, D.; Perşu, C.; Vlăduţ, V.; Bolintinenu, G.H.; Matache, M.; Ungureanu, N.; Zăbavă, B.; et al. Technical considerations regarding to harvesting potatoes and carrots equipment. Ann. Univ. Craiova-Agric. Mont. Cadastre Ser. 2017, 47, 317–323. [Google Scholar]
- Nasr, G.E.D.M.; Rostom, M.N.; Hussein, M.M.M.; Farrag, A.E.F.; Morsy, M.F.A. Development of suitable potato crop harvester for small holdings. Agric. Eng. Int. CIGR J. 2019, 21, 34–39. [Google Scholar]
- Toure, P.A.J.; Sun, W. Design and Characteristic Parameters of a Vibrating Potato Digger for Small Farms. Int. J. Stud. Proj. Report. 2023; accepted for publication. [Google Scholar]
- Wan, E.; Shang, S.; Wang, D.; He, X.; Liu, X. Design and test of tractive potato combined harvester. J. Agric. Mech. Res. 2019, 41, 80–84. [Google Scholar]
- Zhang, Z.; Wang, H.; Li, Y.; Yang, X.; Issa, I.I.M.; Zhang, Z. Design and experiment of multi-stage separation buffer potato harvester. Trans. Chin. Soc. Agric. Mach. 2021, 52, 96–109. [Google Scholar]
- Liu, X.; Yang, Z.; Xue, J.; Chen, Q.; Li, C.; Zheng, Z.; Li, W. Progress of potato research combine harvester. J. Agric. Mech. Res. 2022, 44, 259–263+268. [Google Scholar]
- Zhao, Q. Research status and development prospect of potato harvesting machinery at home and abroad. Agric. Eng. 2020, 10, 7–10. [Google Scholar]
- Khazimov, K.M.; Niyazbayev, A.K.; Shekerbekova, Z.S.; Urymbayeva, A.A.; Mukanova, G.A.; Bazarbayeva, T.A.; Nekrashevich, V.F.; Khazimov, M.Z. A novel method and device for plastic mulch retriever. J. Water Land Dev. 2021, 49, 85–94. [Google Scholar]
- Gao, H.; Yan, C.; Liu, Q.; Ding, W.; Chen, B.; Li, Z. Effects of plastic mulching and plastic residue on agricultural production: A meta-analysis. Sci. Total Environ. 2019, 651, 484–492. [Google Scholar] [CrossRef]
- Niu, Q.; Chen, X.; Ji, C.; Wu, J. Experiment and optimal design of a collection device for a residual plastic film baler. Front. Agric. Sci. Eng. 2016, 2, 347–354. [Google Scholar] [CrossRef]
- Rocca, A.R. Plastic Mulch Retriever. U.S. Patent 8,302,699 B2, 6 November 2012. [Google Scholar]
- Mo, F.; Zhou, H.; Wang, J.; Zhao, H.; Zhang, H.; Wu, S.; Chen, Y.; Yang, T.; Deng, H.; Batool, A.; et al. Development and application of micro-field rain-harvesting technologies. Trans. Chin. Soc. Agric. Eng. 2013, 29, 1–17. [Google Scholar]
- Gao, M.; Jian, J.; Hou, S.; Guo, W.; San, Y.; Sun, Y.; Tian, Y.; Zhai, H. Design and experimental study on nail tooth plastic film composite potato harvester. J. Agric. Mech. Res. 2019, 41, 98–102. [Google Scholar]
- Zhang, M.; Jian, J.; Wang, F.; Li, W.; San, Y.; Guo, W.; Hou, S.; Xue, D. Design and experimental study on belt-tooth type collector for potato film residues. IOP Conf. Ser. Earth Environ. Sci. 2019, 252, 042092. [Google Scholar] [CrossRef]
- Can, H.; Wang, X.; Wang, S.; Lu, B.; Guo, W.; Liu, C.; Tang, X. Impact of agricultural residual plastic film on the growth and yield of drip-irrigated cotton in arid region of Xinjiang, China. Int. J. Agric. Biol. Eng. 2020, 13, 160–169. [Google Scholar]
- Qian, H.; Zhang, M.; Liu, G.; Lu, T.; Qu, Q.; Du, B.; Pan, X. Effects of soil residual plastic film on soil microbial community structure and fertility. Water Air Soil Pollut. 2018, 229, 1–11. [Google Scholar] [CrossRef]
- Dong, L.; Yuan, H. Effects of residual plastic films on soil and crops and control countermeasures. J. Anhui Agric. Sci. 2020, 48, 20–22+26. [Google Scholar]
- Xin, S.; Dai, F.; Zhao, W.; Shi, L.; Gao, Y.; Wu, W.; Shang, Z. Improved design and experiment of combined operation machine for both potato harvesting and plastic film collecting. J. China Agric. Univ. 2017, 22, 164–172. [Google Scholar]
- Dai, F.; Xin, S.; Zhao, W.; Liu, F.; Xin, B.; Ma, M. Design and experiment of combined potato planting machine for covering soil on top of full film surface. Trans. Chin. Soc. Agric. Mach. 2017, 48, 76–83+56. [Google Scholar]
- Yang, L.; Wang, C.; He, P.; An, Y. Optimum thickness of covering soil on plastic films of potato cultivation in Northwest China. J. Agric. 2016, 6, 60–63. [Google Scholar]
- Sun, W.; Wang, H.; Zhao, W.; Zhang, H.; Liu, X.; Wu, J. Design and experiment of potato digger with waste film recollection for complete film mulching, soil covering and ridge sowing pattern. Trans. Chin. Soc. Agric. Mach. 2018, 49, 105–114. [Google Scholar]
- Wei, Z.; Li, H.; Su, G.; Sun, C.; Liu, W.; Li, X. Design and experiment of potato harvester using double cushions for low laying separation technology. Trans. Chin. Soc. Agric. Mach. 2019, 50, 140–152. [Google Scholar]
- China Academy of Agricultural Mechanization Science. Agricultural Machinery Design Manual; China Agricultural Science and Technology Press: Beijing, China, 2007. [Google Scholar]
- Shi, L.; Wu, J.; Zhao, W.; Sun, W.; Wang, D.; Li, H.; Liu, Q. Design and experiment on potato digger of disc ce-grate type. Trans. Chin. Soc. Agric. Eng. 2012, 28, 15–21. [Google Scholar]
- Cui, Z.; Zhang, H.; Zhou, J.; Li, T. Design and test of 4U-750 trailing type sweet potato harvester. J. Chin. Agric. Mech. 2020, 41, 1–5+25. [Google Scholar]
- Lü, J.; Tian, Z.; Yang, Y.; Shang, Q.; Wu, J. Design and experimental analysis of 4U2A type double-row potato digger. Trans. Chin. Soc. Agric. Eng. 2015, 31, 17–24. [Google Scholar]
- Design Simulation Technologies. Working Model 2D, Dynamic Motion Simulation Software; Design Simulation Technologies: Canton, MI, USA, 2023; Available online: www.design-simulation.com (accessed on 10 March 2023).
- Feng, B.; Sun, W.; Shi, L.; Sun, B.; Zhang, T.; Wu, J. Determination of restitution coefficient of potato tubers collision in harvest and analysis of its influence factors. Trans. Chin. Soc. Agric. Eng. 2017, 33, 50–57. [Google Scholar]
- Yurtlu, Y.B.; Yeşiloğlu, E.; Vursavuş, K.K.; Saçilik, K. Coefficient of friction of potato tubers in different surfaces. ADÜ Ziraat Fak. Derg. 2011, 8, 35–40. [Google Scholar]
- Li, Y.; Hu, Z.; Gu, F.; Wang, B.; Fan, J.; Yang, H.; Wu, F. DEM-MBD Coupling Simulation and Analysis of the Working Process of Soil and Tuber Separation of a Potato Combine Harvester. Agronomy 2022, 12, 1734. [Google Scholar] [CrossRef]
- Wei, Z.; Su, G.; Li, X.; Wang, F.; Sun, C.; Meng, P. Parameter optimization and test of potato harvester wavy sieve based on EDEM. Trans. Chin. Soc. Agric. Mach. 2020, 51, 109–122. [Google Scholar]
- Liao, Y.; Sun, Y.; Li, Y.; Fan, J.; Yuan, C.; Wang, T. A kind of digging shovel of cassava harvester design. In Proceedings of the 2010 International Conference on Digital Manufacturing and Automation, Changsha, China, 18–20 December 2010; pp. 34–38. [Google Scholar] [CrossRef]
- Issa, I.I.M.; Zhang, Z.; El-Kolaly, W.; Yang, X.; Wang, H. Design, Ansys analysis and performance evaluation of potato digger harvester. Int. Agric. Eng. J. 2020, 29, 60–73. [Google Scholar]
- Yin, Y.; Wang, Z.; Yang, R.; Wang, J.; Wang, Z. Simulation analysis and parameter optimization of potato harvester conveyor chain. Agric. Eng. 2020, 10, 79–83. [Google Scholar]
- Lü, J.; Yang, X.; Lü, Y.; Li, Z.; Li, J.; Du, C. Analysis and experiment of potato damage in process of lifting and separating potato excavator. Trans. Chin. Soc. Agric. Mach. 2020, 51, 103–113. [Google Scholar]
- Wei, H.; Zhang, J.; Yang, X.; Wang, X.; Dai, L.; Sun, G.; Liu, X. Improved design and test of 4UFD-1400 type potato combine harvester. Trans. Chin. Soc. Agric. Eng. 2014, 30, 12–17. [Google Scholar]
- GB/T 5262-2008; Measuring Methods for Agricultural Machinery Testing Conditions-General Rules. Standards Press of China: Beijing, China, 2009.
- NY/T 648-2015; Technical Specifications of Quality Evaluation for Potato Harvesters. Ministry of Agriculture of the People’s Republic of China: Beijing, China, 2015.
- NY/T 1227-2019; Retrieving Machines for Residual Film—Operating Quality. Ministry of Agriculture and Rural Affairs of the People’s Republic of China: Beijing, China, 2019.
- Shen, H.; Wang, B.; Hu, L.; Wang, G.; Ji, L.; Shen, G.; Wu, T. Design of potato connecting and conveying mechanism for 4UZL-l type sweet potato combine harvester. Trans. Chin. Soc. Agric. Eng. 2020, 36, 9–17. [Google Scholar]
- Zhou, J.; Yang, S.; Li, M.; Chen, Z.; Zhou, J.; Gao, Z.; Chen, J. Design and Experiment of a Self-Propelled Crawler-Potato Harvester For Hilly And Mountainous Areas. INMATEH-Agric. Eng. 2021, 64, 151–158. [Google Scholar] [CrossRef]
- Yang, R.; Yang, H.; Shang, S.; Ni, Z.; Liu, Z.; Guo, D. Design and experiment of vertical circular separating and conveying device for potato combine harvester. Trans. Chin. Soc. Agric. Eng. 2018, 34, 10–18. [Google Scholar]
- Dai, F.; Guo, H.; Zhao, W.; Xin, S.; Liu, X.; Wu, W. Design and Experiment of Canvas Belt Combined Operation Machine for Potato Digging and Plastic Film Collecting. Trans. Chin. Soc. Agric. Mach. 2018, 49, 104–113. [Google Scholar]
- Dorokhov, A.; Didmanidze, O.; Aksenov, A.; Sibirev, A.; Sazonov, N.; Mosyakov, M.; Godyaeva, M. The Results of Studies on the Assessment of the Destruction of Soil Clods during Combine Harvesting of Potatoes. Agriculture 2022, 12, 2024. [Google Scholar] [CrossRef]
- Bao, G.; Wang, G.; Wang, B.; Hu, L.; Xu, X.; Shen, H.; Ji, L. Study on the drop impact characteristics and impact damage mechanism of sweet potato tubers during harvest. PLoS ONE 2021, 16, e0255856. [Google Scholar] [CrossRef] [PubMed]
- Duskulov, A.A.; Makhmudov, K.S. Improved Potato Digger. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2021; p. 12055. [Google Scholar]
- Kostenko, M.Y.; Ruzimurodov, A.A.; Byshov, D.N.; Golakhov, A.A.; Yakutin, N.N. Study of soil separation at a potato chain with a cross rotating agitator. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2020; p. 012032. [Google Scholar]
- Wu, B.; Huang, T.; Qiu, X.; Zuo, T.; Wang, X.; Xie, F. Design and Experimental Study of Potato-Soil Separation Device for Sticky Soils Condition. Appl. Sci. 2021, 11, 10959. [Google Scholar] [CrossRef]
- Danielak, M.; Przybył, K.; Koszela, K. The Need for Machines for the Nondestructive Quality Assessment of Potatoes with the Use of Artificial Intelligence Methods and Imaging Techniques. Sensors 2023, 23, 1787. [Google Scholar] [CrossRef]
- Story, A.G.; Raghavan, G.S.V. Sorting potatoes from stones and soil clods by infrared reflectance. Trans. ASAE 1973, 16, 304–309. [Google Scholar] [CrossRef]
- Hosainpour, A.; Komarizade, M.H.; Mahmoudi, A.; Shayesteh, M.G. High speed detection of potato and clod using an acoustic based intelligent system. Expert Syst. Appl. 2011, 38, 12101–12106. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter Values |
|---|---|
| Length × width × height (mm) | 6050 × 2150 × 2500 |
| Body style | Self-propelled crawler |
| Track gauge (mm) | 1250 |
| Engine power (kW) | 75 |
| Harvesting ridges | 1 |
| Operating rows | 2 |
| Working width (mm) | 1100 |
| Range of digging depths (mm) | 0 to 300 |
| Operating speed v (m/s) | 0.4 to 0.8 |
| Test Type | Industry Standard | Test Value |
|---|---|---|
| Potato loss rate (T1) | Up to 4% | 1.8% |
| Potato damage rate (T2) | Up to 2% | 1.4% |
| Potato impurity rate (T3) | Up to 4% | 3.6% |
| Potato bruising rate (T4) | Up to 3% | 2.8% |
| Residual plastic film pickup rate (c) | At least 80% | 83% |
| Work productivity | 0.12 ha/h |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ju, Y.; Sun, W.; Zhao, Z.; Wang, H.; Liu, X.; Zhang, H.; Li, H.; Simionescu, P.A. Development and Testing of a Self-Propelled Machine for Combined Potato Harvesting and Residual Plastic Film Retrieval. Machines 2023, 11, 432. https://doi.org/10.3390/machines11040432
Ju Y, Sun W, Zhao Z, Wang H, Liu X, Zhang H, Li H, Simionescu PA. Development and Testing of a Self-Propelled Machine for Combined Potato Harvesting and Residual Plastic Film Retrieval. Machines. 2023; 11(4):432. https://doi.org/10.3390/machines11040432
Chicago/Turabian StyleJu, Yuanjin, Wei Sun, Zhiwei Zhao, Hucun Wang, Xiaolong Liu, Hua Zhang, Hui Li, and Petru Aurelian Simionescu. 2023. "Development and Testing of a Self-Propelled Machine for Combined Potato Harvesting and Residual Plastic Film Retrieval" Machines 11, no. 4: 432. https://doi.org/10.3390/machines11040432
APA StyleJu, Y., Sun, W., Zhao, Z., Wang, H., Liu, X., Zhang, H., Li, H., & Simionescu, P. A. (2023). Development and Testing of a Self-Propelled Machine for Combined Potato Harvesting and Residual Plastic Film Retrieval. Machines, 11(4), 432. https://doi.org/10.3390/machines11040432