Abstract
In this paper, we propose and study an iterative algorithm that comprises of a finite family of inverse strongly monotone mappings and a finite family of Lipschitz demicontractive mappings in an Hadamard space. We establish that the proposed algorithm converges strongly to a common solution of a finite family of variational inequality problems, which is also a common fixed point of the demicontractive mappings. Furthermore, we provide a numerical experiment to demonstrate the applicability of our results. Our results generalize some recent results in literature.
Keywords:
variational inequalities; inverse strongly monotone mappings; demicontractive mappings; fixed point problems; Hadamard spaces MSC:
47H06; 47H09; 47J05; 47J25
1. Introduction
The classical variational inequality problem (VIP) is defined in a real Hilbert space setting as: find such that
where T is a nonlinear operator defined on D and D is a nonempty subset of the Hilbert space. The theory of VIP combines concepts of nonlinear operators and convex analysis in such a way that it generalizes both and is used to model nonlinear problems of physical phenomena in economics, sciences and engineering (see [1] for details). The VIP (1) was first introduced in finite dimensional spaces by Stampacchia [2], and since then researchers have devoted a lot of attention to VIP in finite and infinite dimensional spaces (see [3,4,5,6,7,8] and other references therein). Another form of the VIP widely studied in real Hilbert space settings (see [9,10] and the references therein) is defined as: find such that
Several algorithms have been developed for solving VIP and related optimization problems in Hilbert and Banach spaces (see [3,7,11,12,13,14,15,16] and other references therein). It is well known that many of the problems in practical applications of optimization are constrained optimization problems, where the constraints are nonlinear, non-convex and non-smooth. Hence, it is pertinent to extend the study of these optimization problems to the nonlinear space settings, due to its ability to see non-convex and non-smooth constrained optimization problems as convex, smooth and unconstrained problems. For this reason, Németh [17] introduced and generalized the existence and uniqueness results of the classical VIP from Euclidean spaces to complete Riemannian manifolds. This development led to increasing interest from researchers in the study of VIPs and their generalizations in nonlinear spaces (see [18,19,20,21,22,23,24,25,26,27] and other references therein). Despite the increasing attention of researchers in this direction, little attention has been given to other more general nonlinear spaces apart from the Riemannian manifolds. In 2015, Khatibzadeh and Ranjbar [28] extended the study of VIP (2) to the framework of complete CAT(0) spaces. They formulated the VIP as follows:
where D is a nonempty, closed and convex subset of an Hadamard space X and T is a nonexpansive mapping. They established the existence of solutions for the VIP (3) and also employed an inexact proximal point algorithm to approximate a fixed point of the nonexpansive mapping which is also a solution of (3). They obtained convergence result for the algorithm under suitable conditions on the control sequences. Very recently, Alizadeh-Dehghan-Moradlou [29] introduced the notion of inverse strongly monotone mappings in metric spaces as follows: Let D be a nonempty subset of a metric space X and be a mapping. T is called -inverse strongly monotone if there exists such that
where .
Additionally, in [29], the authors studied the VIP (3) in an Hadamard space, where T is an inverse strongly monotone mapping. They established the existence of solutions for the VIP (3) associated with an inverse strongly monotone mapping. Furthermore, they introduced the following iterative algorithm to solve the VIP (3): for arbitrary the sequence is generated by
where , is a metric projection, T is inverse strongly monotone and S is nonexpansive mapping. They obtained that Algorithm (5) -converges to a solution of the VIP (3), which is also a fixed point of the nonexpansive mapping .
Very recently, Osisiogu et al. [30] proposed and studied the following Halpern-type algorithm in Hadamard spaces for approximating a common solution of a finite family of the VIP (3):
where for each , T is an inverse strongly monotone mapping and S is a nonexpansive mapping. They obtained a strong convergence result of Algorithm (6) under some suitable conditions.
Motivated by the results of Khatibzadeh and Ranjbar [28], Alizadeh-Dehghan-Moradlou [29] and Osisiogu et al. [30], we propose and study a viscosity iterative algorithm (from the fact that viscosity-type algorithms converge faster than Halpern-type algorithms and also Halpern-type algorithms are particular cases of viscosity-type algorithms, see [31,32]) that comprises of a finite family of inverse strongly monotone mappings (3) and a finite family of Lipchitz demicontractive mappings in an Hadamard space. Additionally, we establish that the proposed algorithm converges strongly to a common solution of a finite family of VIPs, which is also a common fixed point of a finite family of Lipchitz demicontractive mappings in the framework of Hadamard spaces. Furthermore, we provide a numerical experiment to demonstrate the applicability of our results. Our result generalizes the works of Alizadeh-Dehghan-Moradlou [29] and Osisiogu et al. [30] and other similar works in literature.
2. Preliminaries
Let be a metric space, and be an interval. A curve c (or simply a geodesic path) joining x to y is an isometry such that , and for all . The image of a geodesic path is called the geodesic segment, which is denoted by whenever it is unique. We say that a metric space X is a geodesic space if for every pair of points , there is a minimal geodesic from x to y. A geodesic triangle in a geodesic metric space consists of three vertices (points in X) with geodesic segments between each pair of vertices. For any geodesic triangle, there is a comparison (Alexandrov) triangle such that for . A geodesic space X is a CAT(0) space if the distance between arbitrary pair of points on a geodesic triangle does not exceed the distance between its pair of corresponding points on its comparison triangle . If is a geodesic triangle and is its comparison triangle in X, then is said to satisfy the CAT(0) inequality for all points of and of , if
Let be points in X and be the midpoint of the segment ; then the CAT(0) inequality implies
Inequality (8) is known as CN inequality of Bruhat and Tits [33]. A geodesic space X is said to be a CAT(0) space if all geodesic triangles satisfy the CN inequality. Equivalently, X is called a CAT(0) space if and only if it satisfies the CN inequality. Examples of CAT(0) spaces includes Hadamard manifold, -trees [34], pre-Hilbert spaces [35], hyperbolic metric [36] and Hilbert balls [37].
Let D be a nonempty subset of a metric space A point is called a fixed point of a nonlinear mapping if We denote by the set of fixed points of T. The mapping T is said to be:
- L-Lipschitz, if there exists such thatif then T is called nonexpansive;
- Firmly nonexpansive (see [38]), if
- Quasi-nonexpansive, if and
- k-demicontractive, if and there exists such that
Obviously, the class of quasi-nonexpansive are k-demicontractive mappings. However, the converse is not true (see [39] Example 1.1).
Definition 1.
[40] Let a pair, denoted bybe called a vector in. The quasilinearization mapis defined by
It is easy to see thatandfor all. Furthermore, a geodesic space X is said to satisfy the Cauchy–Schwarz inequality if
It is known from [41] that a geodesically connected metric space is a CAT(0) space if and only if it satisfies the Cauchy–Schwarz inequality.
We state some known and useful results which will be needed in the proof of our main results. In the sequel, we denote strong and -convergence by “” and “” respectively.
Let be a bounded sequence in X and be a continuous mapping defined by . The asymptotic radius of is given by while the asymptotic center of is the set . It is known that in an Hadamard space X, consists of exactly one point. A sequence in X is said to be -convergent to a point if for every subsequence of . In this case, we write - (see [42,43]).
Definition 2.
Let D be a nonempty, closed and convex subset of an Hadamard spaceThe metric projection is a mappingwhich assigns to eachthe unique pointsuch that
Lemma 1.
[44] Let D be a nonempty, closed convex subset of an Hadamard spaceandThenif and only iffor all
Lemma 2.
[29] Let D be a nonempty convex subset of an Hadamard space X andbe an α-inverse strongly monotone mapping. Assumeand definebyIfthenis nonexpansive and
Lemma 3.
[29] Let D be a nonempty convex subset of an Hadamard space X and be a mapping. Then
where and is a mapping defined by for all
Remark 1.
Observe from Lemma 2 that
Lemma 4.
[29] Let D be a nonempty bounded closed convex subset of an Hadamard space X and be an α-inverse-strongly monotone mapping. Then is nonempty, closed and convex.
Lemma 5.
[41,45] Let X be an Hadamard space. Then for all and all we have
- (i)
- (ii)
- (iii)
Lemma 6.
[46] Let X be a CAT(0) space and . Let and be real numbers in such that . Then the following inequality holds:
Lemma 7.
[47] Every bounded sequence in an Hadamard space has a Δ-convergent subsequence.
Lemma 8.
[48] Let X be an Hadamard space, be a sequence in X and Then Δ-converges to x if and only if
Definition 3.
Let D be a nonempty, closed and convex subset of an Hadamard space . A mapping is said to be Δ-demiclosed, if for any bounded sequence in such that and then .
Lemma 9.
[49] Let X be an Hadamard space and be a nonexpansive mapping. Then T is Δ-demiclosed.
Lemma 10.
[50,51] Let be a sequence of non-negative real numbers satisfying
where and satisfy the following conditions:
- (i)
- ,
- (ii)
- orThen
Lemma 11.
[52] Let be a sequence of non-negative real numbers such that there exists a subsequence of with . Then there exists a nondecreasing sequence such that and the following properties are satisfied by all (sufficiently large) numbers :
In fact, .
3. Main Results
In this section, we present our strong convergence results.
Theorem 1.
Let X be an Hadamard space and D be a nonempty, closed and convex subset of . Let be a finite family of -Lipschitz -demicontractive mappings and Δ-demiclosed such that Let be a finite family of -inverse strongly monotone mappings and f be a contraction on D with coefficient Suppose that For arbitrary let the sequence be generated by
where for each such that the following conditions are satisfied:
- (A1)
- (A2)
- (A3)
- (A4)
Then, the sequence converges strongly to an element where is the metric projection of X onto
Proof.
Let then by (10), condition (A3), Lemma 6 and the fact that is nonexpansive, we have
Additionally, since is demicontractive, we have from (10) and Lemma 6 that
Thus, is bounded. Consequently, and are also bounded.
Now we divide the rest of the proof into two cases:
Case 1: Assume that is a monotonically non-increasing sequence. Then, is convergent and
By conditions (A1) and (A3), we obtain that
Similarly, from (13) and condition (A1), we have
Additionally,
Again from (10) and Lemma 6, we have
Since is bounded, by Lemma 7 there exists a subsequence of such that for some Then, it follows from (16) that there exists a subsequence of such that - Additionally, from (17), we have that - Since is -demiclosed for each it follows from (19) that Additionally, is nonexpansive (by Lemma 2) for each thus we obtain from (20) and Remark 1 that Hence, .
Next we show that converges strongly to Since is bounded, we may choose without loss of generality, a subsequence of such that -converges to z and
Thus, by (21) and Lemma 1, we obtain that
From (12), Lemma 5 (iii) and quasilinearization properties in Definition 1, we have that
That is,
where
Case 2: Suppose there exists a subsequence of such that for all Then by Lemma 11, there exists a nondecreasing sequence such that
Therefore
This implies that
Following the arguments as in Case 1, we get
Hence, from (23), we obtain that
Thus, from cases 1 and 2, we conclude that converges to which is an element of
We present some consequences of our main results.
Now, by setting to be a family of quasi-nonexpansive mappings in Theorem 1, we obtain the following result:
Corollary 2.
Let X be an Hadamard space and D be a nonempty, closed and convex subset of Let be a finite family of quasi-nonexpansive mappings, be a finite family of -inverse strongly monotone mappings and f be a contraction on D with coefficient Suppose that For arbitrary let the sequence be generated by
where for each such that conditions (A1)–(A3) of Theorem 1 are satisfied. Then, the sequence converges strongly to an element where is the metric projection of X onto .
Proof.
The proof follows from the proof of Theorem 1. □
By setting in Corollary 2, we obtain the following result:
Corollary 3.
Let X be an Hadamard space and D be a nonempty, closed and convex subset of Let be a quasi-nonexpansive mapping, be an α-inverse strongly monotone mapping and f be a contraction on D with coefficient Suppose that For arbitrary let the sequence be generated by
where and such that and conditions (A1)–(A2) of Theorem 1 are satisfied. Then, the sequence converges strongly to an element where is the metric projection of X onto
Suppose for arbitrary but fixed and for all in Theorem 1, we obtain the following result:
Corollary 4.
Let X be an Hadamard space and D be a nonempty, closed and convex subset of Let be a finite family of -Lipschitz demicontractive mappings and Δ-demiclosed such that Let be a finite family of -inverse strongly monotone mappings and suppose that For arbitrary let the sequence be generated by
where for each such that conditions (A1)–(A4) of Theorem 1 are satisfied. Then, the sequence converges strongly to an element which is the nearest point to
By setting for all in Theorem 1, we obtain the following result:
Corollary 5.
Let X be an Hadamard space and D be a nonempty, closed and convex subset of Let be a finite family of -inverse strongly monotone mappings and f be a contraction on D with coefficient Suppose that For arbitrary let the sequence be generated by
where for each such that conditions (A1)–(A3) of Theorem 1 are satisfied. Then, the sequence converges strongly to an element where is the metric projection of X onto .
4. Numerical Example
In this section, we give a numerical experiment to show the applicability of our result.
Example 1.
[29] Let be an R-tree with radial metric where if x and y are situated on a Euclidean straight line passing through the origin and otherwise. We put and where
Define by
then T is -inverse strongly monotone in
Now, define by We make the following choices of parameters: and then the conditions (A1)–(A3) of Theorem 2 are satisfied. Therefore, for Algorithm (28) becomes
We now consider the following 3 cases for our numerical experiments given in Figure 1 above.
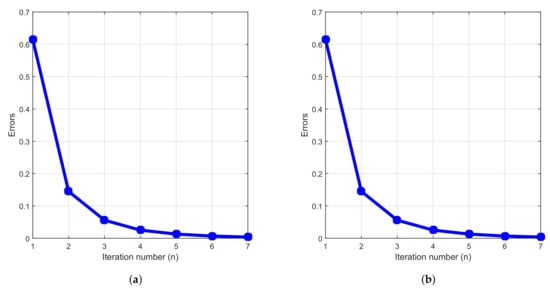
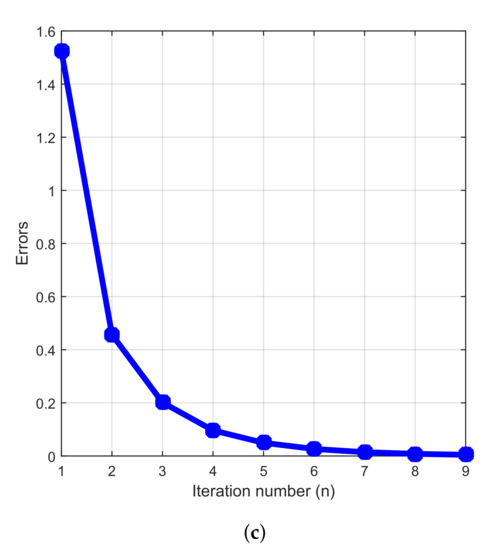
Figure 1.
Errors vs. iteration numbers (n) for Example 1: case 1 (a); case 2 (b); case 3 (c).
- Case 1:.
- Case 2:.
- Case 2:.
Author Contributions
Conceptualization of the article was given by K.O.A., C.I. and O.T.M., methodology by H.A.A., K.O.A., and C.I., software by C.I., validation by O.T.M. and C.I., formal analysis, investigation, data curation, and writing–original draft preparation by K.O.A., H.A.A. and C.I. resources by K.O.A., C.I., H.A.A. and O.T.M. writing–review and editing by K.O.A., C.I. and O.T.M., visualization by C.I. and O.T.M., project administration by O.T.M., Funding acquisition by O.T. All authors have read and agreed to the published version of the manuscript.
Funding
C.I. is funded by National Research Foundation (NRF) South Africa (S&F-DSI/NRF Free Standing Postdoctoral Fellowship; grant number: 120784); H.A.A. is funded by Department of Science and Technology and National Research Foundation, Republic of South Africa Center of Excellence in Mathematical and Statistical Sciences (DST-NRF COE-MaSS) and O.T.M. is funded by National Research Foundation (NRF) of South Africa Incentive Funding for Rated Researchers (grant number 119903).
Acknowledgments
The authors sincerely thank the anonymous reviewers for their careful reading, constructive comments and fruitful suggestions that substantially improved the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Oden, J.T.; Kikuchi, N. Theory of variational inequalities with applications to problems of flow through porous media. Int. J. Eng. Sci. 1980, 18, 1173–1284. [Google Scholar] [CrossRef]
- Stampacchia, G. Variational inequalities. In Theory and Applicalions of Monotone Operators; Ghizzetti, A., Ed.; Edizioni Oderisi: Gubbio, Italy, 1969; pp. 102–192. [Google Scholar]
- Alakoya, T.O.; Jolaoso, L.O.; Mewomo, O.T. Modified inertia subgradient extragradient method with self adaptive stepsize for solving monotone variational inequality and fixed point problems. Optimization 2020. [Google Scholar] [CrossRef]
- Alakoya, T.O.; Jolaoso, L.O.; Mewomo, O.T. Two modifications of the inertial Tseng extragradient method with self-adaptive step size for solving monotone variational inequality problems. Demonstr. Math. 2020, 53, 208–224. [Google Scholar] [CrossRef]
- Allen, G. Variational inequalities, complementarity problems, and duality theorems. J. Math. Anal. Appl. 1977, 58, 1–10. [Google Scholar] [CrossRef]
- Izuchukwu, C.; Mebawondu, A.A.; Mewomo, O.T. A New Method for Solving Split Variational Inequality Problems without Co-coerciveness. J. Fixed Point Theory Appl. 2020, 22, 1–23. [Google Scholar] [CrossRef]
- Jolaoso, L.O.; Taiwo, A.; Alakoya, T.O.; Mewomo, O.T. Strong convergence theorem for solving pseudo-monotone variational inequality problem using projection method in a reflexive Banach space. J. Optim. Theory Appl. 2020, 185, 744–766. [Google Scholar] [CrossRef]
- Khan, S.H.; Alakoya, T.O.; Mewomo, O.T. Relaxed projection methods with self-adaptive step size for solving variational inequality and fixed point problems for an infinite family of multivalued relatively nonexpansive mappings in Banach spaces. Math. Comput. Appl. 2020, 25, 54. [Google Scholar] [CrossRef]
- Marino, G.; Xu, H.K. Explicit hierarchical fixed point approach to variational inequalities. J. Optim. Theory. Appl. 2011, 149, 61–78. [Google Scholar] [CrossRef]
- Moudafi, A. Viscosity approximation methods for fixed-point problems. J. Math. Anal. Appl. 2000, 241, 46–55. [Google Scholar] [CrossRef]
- Alakoya, T.O.; Jolaoso, L.O.; Mewomo, O.T. A self adaptive inertial algorithm for solving split variational inclusion and fixed point problems with applications. J. Ind. Manag. Optim. 2020. [Google Scholar] [CrossRef]
- Gibali, A.; Jolaoso, L.O.; Mewomo, O.T.; Taiwo, A. Fast and simple Bregman projection methods for solving variational inequalities and related problems in Banach spaces. Results Math. 2020, 75, 1–36. [Google Scholar] [CrossRef]
- Izuchukwu, C.; Ogwo, G.N.; Mewomo, O.T. An Inertial Method for solving Generalized Split Feasibility Problems over the solution set of Monotone Variational Inclusions. Optimization 2020. [Google Scholar] [CrossRef]
- Jolaoso, L.O.; Alakoya, T.O.; Taiwo, A.; Mewomo, O.T. Inertial extragradient method via viscosity approximation approach for solving Equilibrium problem in Hilbert space. Optimization 2020. [Google Scholar] [CrossRef]
- Oyewole, O.K.; Abass, H.A.; Mewomo, O.T. A Strong convergence algorithm for a fixed point constrainted split null point problem. Rend. Circ. Mat. Palermo II 2020. [Google Scholar] [CrossRef]
- Taiwo, A.; Owolabi, A.O.-E.; Jolaoso, L.O.; Mewomo, O.T.; Gibali, A. A new approximation scheme for solving various split inverse problems. Afr. Mat. 2020. [Google Scholar] [CrossRef]
- Németh, S.Z. Variational inequalities on Hadamard manifolds. Nonlinear Anal. 2003, 52, 1491–1498. [Google Scholar] [CrossRef]
- Aremu, K.O.; Abass, H.A.; Izuchukwu, C.; Mewomo, O.T. A viscosity-type algorithm for an infinitely countable family of (f,g)-generalized k-strictly pseudononspreading mappings in CAT(0) spaces. Analysis 2020, 40, 19–37. [Google Scholar] [CrossRef]
- Aremu, K.O.; Izuchukwu, C.; Ogwo, G.N.; Mewomo, O.T. Multi-step Iterative algorithm for minimization and fixed point problems in p-uniformly convex metric spaces. J. Ind. Manag. Optim. 2020. [Google Scholar] [CrossRef]
- Aremu, K.O.; Izuchukwu, C.; Ugwunnadi, G.C.; Mewomo, O.T. On the proximal point algorithm and demimetric mappings in CAT(0) spaces. Demonstr. Math. 2018, 51, 277–294. [Google Scholar] [CrossRef]
- Bento, G.C.; Ferreira, O.P.; Oliveira, P.R. Proximal point method for a special class of non convex functions on Hadamard manifolds. Optimization 2015, 64, 289–319. [Google Scholar] [CrossRef]
- Chen, S.L.; Huang, N.J. Vector variational inequalities and vector optimization problems on Hadamard manifolds. Optim. Lett. 2016, 10, 753–767. [Google Scholar] [CrossRef]
- Dehghan, H.; Izuchukwu, C.; Mewomo, O.T.; Taba, D.A.; Ugwunnadi, G.C. Iterative algorithm for a family of monotone inclusion problems in CAT(0) spaces. Quaest. Math. 2020, 43, 975–998. [Google Scholar] [CrossRef]
- Ogwo, G.N.; Izuchukwu, C.; Aremu, K.O.; Mewomo, O.T. A viscosity iterative algorithm for a family of monotone inclusion problems in an Hadamard space. Bull. Belg. Math. Soc. Simon Stevin 2020, 27, 127–152. [Google Scholar] [CrossRef]
- Ogwo, G.N.; Izuchukwu, C.; Aremu, K.O.; Mewomo, O.T. On θ-generalized demimetric mappings and monotone operators in Hadamard spaces. Demonstr. Math. 2020, 53, 95–111. [Google Scholar] [CrossRef]
- Taiwo, A.; Jolaoso, L.O.; Mewomo, O.T. Viscosity approximation method for solving the multiple-set split equality common fixed-point problems for quasi-pseudocontractive mappings in Hilbert Spaces. J. Ind. Manag. Optim. 2017. [Google Scholar] [CrossRef]
- Ugwunnadi, G.C.; Izuchukwu, C.; Mewomo, O.T. Strong convergence theorem for monotone inclusion problem in CAT(0) spaces. Afr. Mat. 2019, 31, 151–169. [Google Scholar] [CrossRef]
- Khatibzadeh, H.; Ranjbar, S. A variational inequality in complete CAT(0) spaces. J. Fixed Point Theory Appl. 2015, 17, 557–574. [Google Scholar] [CrossRef]
- Alizadeh, S.; Dehghan, H.; Moradlou, F. Δ-convergence theorem for inverse strongly monotone mapping in CAT(0) spaces. Fixed Point Theory 2018, 19, 45–56. [Google Scholar] [CrossRef]
- Osisiogu, U.A.; Adum, F.L.; Efor, T.E. Strong convergence results for variational inequality problem in CAT(0) spaces. Adv. Nonlinear Var. Inequal. 2020, 23, 84–101. [Google Scholar]
- Izuchukwu, C.; Okeke, C.C.; Isiogugu, F.O. Viscosity iterative technique for split variational inclusion problem and fixed point problem between Hilbert space and Banach space. J. Fixed Point Theory Appl. 2018, 20, 1–25. [Google Scholar] [CrossRef]
- Song, Y.; Liu, X. Convergence comparison of several iteration algorithms for the common fixed point problems. Fixed Point Theory Appl. 2009, 2009, 824374. [Google Scholar] [CrossRef][Green Version]
- Bruhat, F.; Tits, J. Groupes réductits sur un cor local. In Donnee´s Radicielles Valuee´s; Institut des Hautes E´tudes Scientifiques: Bures-sur-Yvette, France, 1972; Volume 41. [Google Scholar]
- Kirk, W.A. Fixed point theorems in CAT(0) spaces and R-trees. Fixed Point Theory Appl. 2004, 2004, 309–316. [Google Scholar] [CrossRef]
- Bridson, M.R.; Haefliger, A. Metric Spaces of Non-Positive Curvature. In Fundamental of Mathematical Sciences; Springer: Berlin, Germany, 1999; Volume 319. [Google Scholar]
- Reich, S.; Shafrir, I. Nonexpansive iterations in hyperbolic spaces. Nonlinear Anal. 1990, 15, 537–558. [Google Scholar] [CrossRef]
- Goebel, K.; Reich, S. Uniform Convexity, Hyperbolic Geometry and Nonexpansive Mappings; Marcel Dekker: New York, NY, USA, 1984. [Google Scholar]
- Khatibzadeh, H.; Ranjbar, S. Monotone operators and the proximal point algorithm in complete CAT(0) metric spaces. J. Aust. Math. Soc. 2017, 103, 70–90. [Google Scholar] [CrossRef]
- Aremu, K.O.; Jolaoso, L.O.; Izuchukwu, C.; Mewomo, O.T. Approximation of common solution of finite family of monotone inclusion and fixed point problems for demicontractive mappings in CAT(0) spaces. Ric. Mat. 2020, 69, 13–34. [Google Scholar] [CrossRef]
- Berg, I.D.; Nikolaev, I.G. Quasilinearization and curvature of Alexandrov spaces. Geom. Dedicata 2008, 133, 195–218. [Google Scholar] [CrossRef]
- Dhompongsa, S.; Panyanak, B. On Δ-convergence theorems in CAT(0) spaces. Comp. Math. Appl. 2008, 56, 2572–2579. [Google Scholar] [CrossRef]
- Dhompongsa, S.; Kirk, W.A.; Sims, B. Fixed points of uniformly Lipschitzian mappings. Nonlinear Anal. 2006, 65, 762–772. [Google Scholar] [CrossRef]
- Kirk, W.A.; Panyanak, B. A concept of convergence in geodesic spaces. Nonlinear Anal. 2008, 68, 3689–3696. [Google Scholar] [CrossRef]
- Dehghan, H.; Rooin, J. A characterization of metric projection in CAT(0) spaces. arXiv 2013, arXiv:1311.4174VI. [Google Scholar]
- Dehghan, H.; Rooin, J. Metric projection and convergence theorems for nonexpansive mapping in Hadamard spaces. arXiv 2014, arXiv:1410.1137VI. [Google Scholar]
- Chidume, C.E.; Bello, A.U.; Ndambomve, P. Strong and Δ-convergence theorems for common fixed points of a finite family of multivalued demicontractive mappings in CAT(0) soaces. Abstr. Appl. Anal. 2014, 2014, 805168. [Google Scholar] [CrossRef]
- Leustean, L. Nonexpansive iterations in uniformly convex W-hyperbolic spaces. arXiv 2013, arXiv:0810.4117. [Google Scholar]
- Kakavandi, B.A.; Amini, M. Duality and subdifferential for convex functions on complete CAT(0) metric spaces. Nonlinear Anal. 2010, 73, 3450–3455. [Google Scholar] [CrossRef]
- Dhompongsa, S.; Kirk, W.A.; Panyanak, B. Nonexpansive set-valued mappings in metric and Banach spaces. J. Nonlinear Convex Anal. 2007, 8, 35–45. [Google Scholar]
- Taiwo, A.; Alakoya, T.O.; Mewomo, O.T. Halpern-type iterative process for solving split common fixed point and monotone variational inclusion problem between Banach spaces. Numer. Algorithms 2020. [Google Scholar] [CrossRef]
- Xu, H.K. Iterative algorithms for nonlinear operators. J. Lond. Math. Soc. 2002, 66, 240–256. [Google Scholar] [CrossRef]
- Taiwo, A.; Jolaoso, L.O.; Mewomo, O.T.; Gibali, A. On generalized mixed equilibrium problem with α-β-μ bifunction and μ-τ monotone mapping. J. Nonlinear Convex Anal. 2020, 21, 1381–1401. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).