Abstract
This work is axiomatic and structural in nature and is not intended as a phenomenological physical theory, but as a framework clarifying minimal informational primitives from which geometric and dynamical descriptions may emerge. We present a background-independent framework in which physical geometry, interaction-like forces, and spacetime arise as effective descriptions of constrained relational information rather than as fundamental entities. The only primitive structure is a network of degrees of freedom linked by admissible informational relations, each subject to quantifiable constraints on accessibility or flow. The motivation is to identify whether a single minimal relational primitive can account jointly for the emergence of geometry, forces, and spacetime, without presupposing a manifold, fields, or fundamental interactions. The framework is formalized using weighted relational graphs in which constraint weights encode limitations on information flow between degrees of freedom. Effective geometry is defined operationally through minimal constraint cost along relational paths, yielding an emergent metric without assuming spatial embedding. Relational evolution is modeled via a minimal configuration-space dynamics defined by local rewrite moves, and a statistical description is introduced through an informational action that governs coarse-grained response rather than serving as a fundamental dynamical law. Curvature-like observables are defined using transport-based comparisons of local accessibility structure. Within this setting, metric structure emerges from constrained relational accessibility, while curvature-like behavior arises from heterogeneity in constraint structure. Effective forces appear as entropic or informational action gradients with respect to coarse-grained control parameters that modulate relational constraints, and are interpreted as emergent responses rather than primitive interactions. A finite worked example explicitly demonstrates the emergence of nontrivial distance, curvature proxies, and an effective force via geodesic switching under constraint variation, without assuming fundamental spacetime, fields, or particles. The results support an interpretation in which geometry, forces, and spacetime are representational features of constrained information flow rather than fundamental elements of physical law. The framework clarifies conceptual distinctions and points of compatibility with existing approaches to emergent spacetime, and it outlines qualitative expectations for regimes in which smooth geometric descriptions are expected to break down. The work delineates the scope and limits of geometric description without proposing a complete phenomenological theory.
Keywords:
relational information; emergent spacetime; information geometry; constrained information flow; background independence; entropic forces; emergent geometry; quantum gravity foundations; relational dynamics; coarse-graining MSC:
03A10; 94A17; 51F99; 60B05
1. Introduction
The reconciliation of general relativity and quantum mechanics remains one of the central open problems in fundamental physics. While significant technical obstacles persist, it has become increasingly clear that the difficulty is not merely computational but conceptual: the assumptions that spacetime, locality, and geometric dynamics are fundamental may themselves be emergent and approximate. A growing body of work across quantum gravity, quantum information, and statistical physics suggests that spacetime geometry may arise from more primitive, non-geometric structures rather than serving as the fundamental arena of physical law.
Compelling evidence for this perspective comes from holographic dualities, where geometric properties of a gravitational spacetime are reconstructed from quantum information-theoretic properties of a non-gravitational system. In these settings, spatial connectivity and distance are encoded in entanglement structure rather than postulated a priori, and geometric quantities admit precise information-theoretic characterizations [1,2,3]. Closely related ideas appear in tensor-network approaches, where emergent geometry reflects patterns of entanglement and coarse-graining rather than an underlying manifold [4].
In parallel, several lines of research suggest that gravitational dynamics themselves may be emergent rather than fundamental. Thermodynamic and information-theoretic arguments indicate that Einstein’s equations can be interpreted as effective equations of state arising from entropy balance and information flow constraints, rather than as primitive dynamical laws [5,6,7]. From this viewpoint, gravity is not a fundamental interaction but a macroscopic response of underlying degrees of freedom to informational constraints.
Despite these advances, many existing approaches to emergent spacetime retain substantial geometric or causal structure at the fundamental level. Holographic dualities typically presuppose an asymptotic spacetime structure and a boundary theory; loop quantum gravity begins with quantized geometric variables such as areas and volumes; and causal set theory takes causal order as a primitive relation [8,9,10,11]. While these frameworks eliminate background geometry in important respects, they nonetheless assume that certain geometric or causal concepts remain fundamental.
This motivates the exploration of a logically prior framework in which neither geometry, nor spacetime, nor forces are fundamental. Instead, the only primitive elements are abstract degrees of freedom together with the admissible informational relations between them, subject to quantifiable constraints. Within such a framework, geometry arises as a representation of constrained relational accessibility; forces appear as system-level responses to gradients in informational constraints; and spacetime emerges as a macroscopic, coarse-grained description of relational transformation structure rather than as a pre-existing arena. The purpose of the present work is to identify the minimal structural conditions under which such descriptions arise, not to reproduce their detailed phenomenological form.
Aims and Scope of the Present Work: The aim of this paper is axiomatic and structural rather than predictive. We do not propose a new phenomenological physical theory, nor do we attempt to derive established dynamical laws. Instead, we identify a minimal set of relational and informational primitives and show how standard physical notions—geometry, force, spacetime, and particle-like excitations—can arise as effective and representational structures under appropriate coarse-graining. The contribution of this work is therefore foundational in nature: it clarifies the logical and structural conditions under which familiar physical descriptions become meaningful, without committing to their detailed phenomenological realization.
Philosophical and conceptual analyses of spacetime emergence emphasize that “emergent spacetime” encompasses multiple distinct claims, including the emergence of metric structure, dimensionality, causal order, and gravitational dynamics [12]. A coherent foundational framework should therefore clarify which aspects of spacetime are emergent, from what underlying structures, and under what conditions geometric descriptions are valid. The present work contributes to this program by providing a unified formalization in which geometry and dynamics are treated as effective representational layers, not as ontological primitives. Metric structure is addressed explicitly here, while causal ordering and Lorentzian signature are associated with directed relational dynamics and are not derived in this work.
Our approach integrates three mathematical ingredients. First, the fundamental substrate is modeled as a relational network whose weighted links encode constraints on admissible information flow between degrees of freedom. Second, relational evolution is described via a background-independent configuration-space dynamics defined by local rewrite moves, with category-theoretic language used solely as an organizing framework rather than as a replacement for dynamics. No claim of uniqueness or physical realism is made for this specific dynamical instantiation; it serves to demonstrate internal consistency and emergent structure. Third, a statistical and information-geometric description of coarse-grained relational states is introduced, allowing effective geometry and interaction-like responses to be identified without assuming a manifold, local fields, or fundamental spacetime.
The resulting relational information framework both subsumes and extends existing approaches to emergent spacetime. It is compatible with the emergence of causal structure from ordered transformations rather than from primitive causal relations, while remaining agnostic about the existence of a fundamental global time or causal order. It also accommodates holographic and entanglement-based reconstructions of geometry as special cases in which relational information admits an efficient geometric encoding. By explicitly allowing multiple independent channels of informational constraint, the framework naturally accounts for the appearance of distinct effective interactions without postulating multiple fundamental forces.
Contributions and Paper Structure
This paper advances a unified relational-information framework for fundamental physics with the following contributions:
- 1.
- Relational definition of geometry.
Geometry is defined operationally as a structure of constrained relational accessibility between degrees of freedom, derived from minimal information-flow cost rather than assumed as a background manifold.
- 2.
- Emergent forces from informational gradients.
Interaction-like forces arise as coarse-grained responses to gradients in informational constraints and are formalized as gradients of an informational action or free-energy functional.
- 3.
- Effective spacetime as an emergent information geometry.
Spacetime is identified with an information-geometric structure on ensembles of relational configurations, with metric properties separated conceptually and mathematically from causal ordering.
- 4.
- Explicit worked example.
A minimal relational model demonstrates the emergence of distance, curvature proxies, and an effective force via geodesic switching under constraint variation, without assuming fundamental spacetime, fields, or particles.
Informal overview. This paper explores the idea that physical geometry, forces, spacetime, and particles need not be fundamental ingredients of physical law. Instead, we start from a minimal relational substrate: abstract degrees of freedom connected by admissible information channels subject to constraints. From this substrate, we define an emergent notion of distance as minimal constraint cost, interpret curvature as heterogeneity in relational accessibility, and describe dynamics as local rewritings of relational structure rather than evolution in time. Coarse-graining and statistical descriptions then give rise to effective forces as responses to informational gradients, spacetime as an information-geometric construct, and particle-like excitations as stable relational motifs. The aim is not to reproduce known physics in detail, but to clarify how its structural features can arise from constrained relational information alone. Throughout, the emphasis is on structural sufficiency rather than phenomenological completeness.
Figure 1 provides a schematic overview of the framework developed in this work. Starting from a purely relational substrate defined by degrees of freedom and constrained informational relations, an accessibility metric is induced from minimal constraint cost. Coarse-graining over relational configurations then yields effective geometric and dynamical descriptions, in which curvature, interaction-like forces, and particle-like excitations arise as emergent, representational structures rather than fundamental entities.

Figure 1.
From relational information to effective physics. Schematic representation of the relational information framework. The fundamental substrate consists of abstract degrees of freedom connected by admissible relations with associated constraint weights, without presupposing spacetime or geometry. An accessibility metric is induced from minimal constraint cost between degrees of freedom, defining emergent notions of distance and locality. Statistical coarse-graining over relational configurations yields macroscopic descriptions in which effective geometry, curvature, interaction-like forces, and particle-like excitations arise as representational structures of constrained information flow.
The paper is organized as follows. Section 2 introduces the relational constraint substrate and defines emergent distance and locality. Section 3 presents the relational dynamics via local rewrite moves and an informational action. Section 4 develops the statistical and information-geometric description and clarifies the emergence of metric structure versus causal ordering. Section 5 presents a worked example exhibiting emergent distance, curvature, and effective force. Section 6 discusses particle-like excitations, scattering, and numerical extensions illustrating smooth emergent behavior. Section 7 compares the framework with loop quantum gravity, holography, and causal set theory. Section 8 discusses limitations, qualitative predictions, and directions for future work, and concludes.
2. Relational Constraint Substrate and Emergent Geometry
2.1. Relational Degrees of Freedom
We take as a foundational postulate that the fundamental constituents of physical description are neither spacetime points, particles, nor fields, but abstract degrees of freedom related by admissible informational constraints. These degrees of freedom are not assumed to be embedded in any pre-existing geometric, topological, or causal structure.
Formally, the fundamental structure is represented by a directed, weighted relational graph
where
- V is a set of nodes representing abstract degrees of freedom,
- E ⊆ V × V is a set of directed relational links,
- C: E→ assigns a nonnegative constraint weight to each relation.
A directed edge e = (i, j) indicates that information flow or relational influence from i to j is admissible, subject to the constraint quantified by C(e). No notion of spatial adjacency, metric distance, temporal ordering, or causal precedence is assumed at this level. The graph encodes only which relational transitions are permitted and how constrained they are.
This relational graph constitutes the sole fundamental structure of the framework. All geometric, dynamical, and spacetime concepts introduced later arise as effective descriptions of its large-scale or coarse-grained behavior.
2.2. Operational Interpretation of Constraints and Action
To avoid ambiguity in the use of “information,” we now fix explicit operational meanings for both the edge constraint weights C(e) and the informational action S(G) used to weight relational configurations.
2.2.1. Constraint Weights as Path-Additive Informational Cost
Each directed edge e = (i, j) ∈ E is interpreted as an admissible information channel between degrees of freedom i and j. The constraint weight C(e) quantifies the difficulty or limitation associated with using that channel.
In this paper, we adopt the following primary interpretation:
Constraint cost interpretation. C(e) is a nonnegative, path-additive cost representing the resistance, friction, or constraint strength associated with relational information flow along edge e.
This interpretation is operationally minimal and sufficient to define emergent geometry. Alternative interpretations—such as channel capacity or transition probability—are mathematically equivalent after monotone reparameterization (e.g., inverse capacity or negative log-likelihood) and are therefore not treated separately in the main development.
2.2.2. Informational Action as Global Constraint Tension
To define statistical ensembles of relational configurations and to support emergent forces at the coarse-grained level, we assign each configuration G an informational action S(G).
Operationally, S(G) quantifies the global tension induced by relational constraints: configurations dominated by strongly constrained relations are penalized relative to more accessible ones.
For definiteness, we adopt a minimal additive form:
where is a monotonically increasing function. Typical choices include Φ(c) = c or Φ(c) = c2; the precise form is not fixed at the foundational level.
For the results below, S(G) is only required to be monotone in constraint strength and to induce a well-defined Gibbs ensemble; additivity is adopted solely for transparency and can be relaxed without changing the qualitative emergence claims.
Remark (Relational coupling). The additive form in Equation (2) is adopted for transparency and minimality, but the framework does not require strict additivity. When two relational substructures occupy overlapping or adjacent neighborhoods with respect to the emergent accessibility distance, admissible rewrites affecting one region necessarily modify the constraint landscape experienced by the other. In such cases, the informational action depends jointly on the configuration of both substructures, and effective coupling arises through shared or competing constraints. No additional interaction primitives are required: interaction is a consequence of constraint overlap within a common relational substrate.
This choice induces a Gibbs-type ensemble over relational configurations,
and suffices to define statistical observables, information-geometric structure, and entropic response functions in later sections. More structured actions (e.g., relative entropy or rate–distortion functionals) are compatible with the framework but are not required for the results presented here.
2.3. Emergent Geometry from Relational Accessibility
Geometry is not introduced as a primitive structure but arises as a derived property of the relational constraint network.
Given two nodes i, j ∈ V, we define the effective accessibility distance
where the infimum is taken over all directed paths p from i to j. If no such path exists, d(i, j) = +∞.
This distance measures minimal constraint cost, not spatial separation. Two degrees of freedom are “close” if relational information can propagate between them with low cumulative constraint, regardless of graph-theoretic adjacency.
Dimensionality and curvature are not postulated but inferred from the scaling properties and distortions of this accessibility structure. In particular:
- Effective dimension is extracted from the growth of reachable nodes within balls of radius r under d,
- Curvature arises from heterogeneity in constraint structure and manifests through deviations from tree-like or Euclidean scaling, formalized later via transport-based observables.
2.4. Metric Properties and Directed Structure
We now state the basic structural properties of the emergent distance.
Lemma 1 (Extended quasi-metric).
Let G = (V, E, C) be a directed graph with nonnegative edge weights C(e). The function d: V × V→[0,∞] defined by Equation (4) satisfies:
- d(i, i) = 0 for all i ∈ V;
- d(i, j) ≥ 0 for all i, j ∈ V;
- d(i, k) ≤ d(i, j) + d(j, k) for all i, j, k ∈ V.
In general, d is neither symmetric nor finite-valued. It is therefore an extended quasi-metric on V.
Finiteness
If j is reachable from i by at least one directed path, then d(i, j) < ∞. If the graph is strongly connected, d(i, j) is finite for all ordered pairs.
Symmetrization
A canonical symmetric distance is
which defines an extended pseudometric. If all edge weights are strictly positive and the graph is strongly connected, ds is a genuine metric.
Remark (Directed locality and causal asymmetry).
Neighborhoods defined using d,
are generically anisotropic and encode directional accessibility. This naturally supports causal-like asymmetries without postulating a fundamental causal order. When a symmetric notion of locality is required, neighborhoods defined via ds may be used instead.
Clarification (directionality vs. causality). In this framework, edge direction encodes asymmetric accessibility (i.e., the admissibility and cost of informational influence from one degree of freedom to another) and is defined at the level of a single configuration G. This should not be conflated with causal or temporal ordering: no global time parameter, no event structure, and no causal precedence relation is assumed on V. Ordering enters only at the level of composable configuration transformations (Section 3), where sequences of rewrite morphisms provide a notion of precedence between configurations rather than a fundamental causal order among nodes.
2.5. Emergent Locality
Locality is not fundamental in this framework. Instead, it is an emergent, scale-dependent property defined by constraint-induced neighborhoods.
For a given node i, define the relational neighborhood
Local behavior emerges when:
- constraint distributions are approximately homogeneous over a range of scales, and
- these neighborhoods are stable under coarse-graining.
In such regimes, effective interactions become dominated by nearby relational degrees of freedom, producing the appearance of local dynamics and smooth geometry. At sufficiently small scales, however, nonlocal connectivity is generic and expected.
End of Section 2—What Has Been Established
- The only fundamental structure is a directed relational network with nonnegative constraint costs.
- Geometry emerges operationally as minimal constraint accessibility, yielding a (quasi-)metric without embedding.
- Directionality encodes accessibility asymmetry without assuming time or causality.
- Locality is scale-dependent and emergent, not primitive.
3. Relational Dynamics and a Minimal Dynamical Postulate
The relational constraint network introduced in Section 2 encodes admissible relations and their associated constraint strengths, but by itself it is kinematical. Physical evolution corresponds to changes in relational configurations. In keeping with the background-independent philosophy of the framework, such evolution must be defined without reference to an external time parameter or pre-existing spacetime structure.
In this section, we introduce a minimal notion of relational dynamics. Category-theoretic language is used as an organizational tool to describe admissible transformations between configurations, while the actual dynamical content is specified by local rewrite rules and a probabilistic weighting over relational histories.
3.1. Relational Configurations as a Category
Let Ω denote the set of admissible relational configurations G = (V, E, C) satisfying the structural requirements of Section 2 (nonnegative constraint weights, admissible degree bounds, and any imposed label consistency).
We define a category as follows:
- Objects are relational configurations G ∈ Ω.
- Morphisms m: G→G′ are admissible transformations between configurations that preserve global consistency conditions (e.g., positivity of constraints and admissibility of relations).
- Composition of morphisms corresponds to sequential relational updates.
- Identity morphisms correspond to unchanged configurations.
No notion of physical time is introduced at this level. Ordering arises solely from the composability of transformations. In this sense, “dynamics” is identified with relational change rather than with trajectories parametrized by an external clock.
The category serves to formalize the space of possible relational evolutions; it does not by itself specify which evolutions are realized or how likely they are. That task is addressed by the dynamical postulate introduced below.
3.2. Geometry as a Functorial Representation
Effective geometric descriptions arise when relational configurations are mapped to geometric objects via coarse-graining or representational choice.
Let Geom denote a category whose objects are geometric structures (such as metric spaces or discrete geometries) and whose morphisms preserve the relevant geometric relations. A geometric representation is specified by a functor
Different choices of F correspond to different observational regimes, coarse-graining procedures, or effective descriptions. No single geometric representation is privileged at the fundamental level. This formalizes the claim that geometry is not ontological but representational: it is an encoding of relational information appropriate to a given scale or approximation.
3.3. Forces as Representational Mismatch
Within this framework, forces are not fundamental interactions acting on primitive geometric objects. Instead, they arise as manifestations of tension between relational dynamics and particular geometric representations.
Given two geometric functors , a natural transformation
quantifies the systematic discrepancy between two effective geometric encodings of the same underlying relational evolution.
At the effective level, such discrepancies appear as forces acting within the geometric description: they signal the failure of relational information flow to be uniformly or consistently represented within a chosen geometric framework. Importantly, nothing corresponding to a force exists at the relational level itself. Forces arise only after a representational choice has been made.
This categorical language anticipates the statistical formulation of forces in Section 4, where forces are identified explicitly with gradients of an informational action or free energy.
3.4. Minimal Dynamical Postulate: Local Rewrite Dynamics
To render the framework predictive at the level of relational statistics, we now specify a minimal dynamical rule governing relational evolution. This rule is a representative instantiation introduced for concreteness; the emergence claims rely on the relational substrate and constrained accessibility, not on the uniqueness of this particular stochastic update scheme. It consists of (i) a class of elementary local transformations and (ii) a probabilistic weighting that favors configurations with lower informational tension.
3.4.1. Elementary Rewrite Moves
Let denote a set of elementary local rewrite moves m: G→G′, each acting nontrivially only within a bounded relational neighborhood (as defined in Section 2).
A minimal generating set sufficient for the present work includes:
- Constraint update.
For a selected edge e ∈ E, update its constraint weight
leaving all other relations unchanged.
- 2.
- Local rewiring.
Replace a finite set of edges within a bounded neighborhood by a new admissible set, subject to consistency conditions such as bounded degree or label preservation.
- 3.
- Motif-preserving move (optional).
If a class of stable relational motifs is specified, allow local transformations that preserve motif identity up to equivalence. These moves support the persistence and propagation of particle-like excitations discussed in Section 6.
General morphisms in are finite compositions of such elementary rewrites.
Admissibility dependence. The rewrite set may be taken either (i) uniform, generated by a fixed local rulebook applied wherever patterns match, or (ii) state-dependent, where global constraints (e.g., degree bounds, label consistency, conserved motif counts, or constraint budgets) restrict which local proposals are admissible in a given G. The emergence claims of the present work do not depend on which option is chosen; however, state-dependence affects proposal availability and can be handled explicitly in the transition kernel.
3.4.2. Markovian Evolution on Configuration Space
Relational evolution is modeled as a discrete-time Markov process on Ω. Given a current configuration Gt, the next configuration Gt+1 is obtained by selecting an admissible rewrite and setting
Transition probabilities are chosen to satisfy detailed balance with respect to the informational action S(G) defined in Section 2:
where , β ≥ 0 is an inverse-noise parameter, and Z(G) normalizes the outgoing probabilities.
In the limit β → ∞, evolution becomes a greedy descent in informational action; for finite β, the dynamics explores near-optimal configurations. This rule provides a concrete answer to the question of why certain relational histories are more probable than others.
To ensure a well-defined stationary distribution when is state-dependent, one may interpret Equation (10) as a Metropolis–Hastings kernel with proposal distribution q(G → G′) supported on , and acceptance chosen to satisfy detailed balance with respect to . This guarantees consistency even when admissibility depends on global properties of G.
3.4.3. Stationary Ensemble and Consistency
The dynamics admit a stationary distribution
ensuring consistency with the statistical and information-geometric structures developed in Section 4. The specific form of the action S(G) is not unique, but the minimal choice adopted here is sufficient to define coarse-grained observables and emergent forces.
3.4.4. Relational Histories
Equivalently, one may assign a probability weight to an entire relational history
via
γ = (G0→G1→⋯→GT)
Histories that accumulate lower informational action are exponentially favored. Dynamics is thus governed by constrained relational information flow rather than by time-parametrized equations of motion.
This provides the pruning principle: although many rewrite sequences may connect the same endpoints, histories are not equally weighted. The action-based weighting exponentially suppresses high-tension trajectories, yielding a dominated set of typical histories in the β ≫ 1 regime and a controlled fluctuation ensemble at finite β.
3.5. Scope and Interpretation
The dynamical postulate introduced here is intentionally minimal. It does not claim uniqueness, nor does it assert that relational evolution is fundamentally stochastic. Rather, it provides a consistent instantiation that:
- defines admissible transformations,
- assigns relative weights to relational histories, and
- induces a well-defined statistical ensemble.
The framework is therefore not “anything goes”: admissibility restricts which moves are possible, and the action weights restrict which histories are typical.
Alternative dynamical principles—such as maximum caliber formulations or deterministic rewrite systems—can be incorporated within the same architectural framework.
End of Section 3—What Has Been Established
- Relational evolution is defined without background time via admissible configuration updates.
- Category theory organizes relational transformations but does not replace dynamics.
- A minimal local rewrite dynamics with an informational action induces a consistent ensemble.
- Forces and time will emerge only at the coarse-grained, statistical level.
4. Statistical Layer, Emergent Forces, and Information Geometry
The relational dynamics introduced in Section 3 defines admissible transformations between configurations but does not by itself yield smooth, macroscopic descriptions. At observationally accessible scales, detailed relational configurations are inaccessible, and only coarse-grained features of relational structure are resolved. This motivates a statistical description of relational states and provides the setting in which effective forces and spacetime geometry emerge.
4.1. Statistical Description of Relational Configurations
Let Ω denote the space of admissible relational configurations G = (V, E, C). Given the informational action S(G) defined in Section 2 and the Markov dynamics of Section 3, relational configurations are described statistically by the Gibbs-type distribution
where β ≥ 0 is an inverse-noise parameter and Z is the normalization constant.
At this level, physical evolution corresponds not to trajectories in spacetime but to transitions among relational configurations that extremize or approximately extremize informational action subject to imposed constraints. Macroscopic observables are expectation values over P(G), and effective laws arise from regularities in these distributions rather than from fundamental equations of motion.
4.2. Emergent Forces as Statistical Responses
Effective forces arise when relational configurations are constrained by coarse-grained control parameters. Let θ = (θ1, …, θn) denote a set of macroscopic parameters that modulate relational constraints—for example, parameters controlling bottleneck strengths, constraint budgets, or motif densities. These parameters induce a family of distributions
Define the corresponding free energy
An effective force conjugate to θi is then defined as
To make explicit that this is a statistical response rather than a stipulative definition, note that
Hence
The effective force is therefore the negative ensemble average of the generalized constraint-tension conjugate to θi. It quantifies the expected change in informational action under infinitesimal modulation of relational constraints.
These forces are entropic or informational in origin: no background spatial coordinates or fundamental interaction fields are assumed. Classical force laws emerge only in regimes where constraint distributions are sufficiently smooth and symmetric to admit a geometric interpretation.
Worked example. Section 5 provides an explicit finite model in which a single control parameter strengthens a bottleneck constraint, producing (i) a change in dominant geodesic pathway and (ii) a nontrivial coarse-grained response . This illustrates how “force” arises as a system-level response to constraint modulation rather than as a primitive interaction.
4.3. Emergent Geometry from Information Metrics
The family of probability distributions P(G∣θ) defines a statistical manifold parameterized by θ. This manifold carries a natural information metric, the Fisher information metric,
This metric measures distinguishability between nearby macroscopic relational states. In regimes where coarse-grained parameters vary smoothly and fluctuations are well controlled, provides an effective geometric structure on . It is this information-geometric structure—not the relational graph itself—that is identified with emergent spacetime geometry.
Spacetime, in this framework, is therefore not the arena in which relational dynamics occurs. It is a derived, macroscopic construct encoding the distinguishability and organization of relational states under coarse-graining.
Interpretation bridge. The Fisher metric supplies a natural notion of distance between macrostates—how distinguishable two coarse-grained relational ensembles are under finite observational resolution. When coarse-graining parameters θ are chosen to represent spatially localized constraint profiles (e.g., regional bottleneck strengths, motif densities in neighborhoods defined by d, or coarse transport capacities), then (i) locality corresponds to directions in θ—space that perturb only nearby relational neighborhoods, (ii) dimensionality can be inferred from scaling of distinguishability volumes or ball-growth in the induced accessibility metric (Section 2.5 and Section 6.7), and (iii) effective spatial distance is recovered when changes in θ correspond to translations of localized constraint patterns. In this restricted—but operationally relevant—regime, the information geometry is an effective spacetime geometry on the manifold of macrostates.
4.4. Causality, Time, and Metric Signature
The Fisher information metric is by construction Riemannian (positive definite). This raises an immediate conceptual issue: physical spacetime in general relativity is pseudo-Riemannian with Lorentzian signature and supports causal structure absent from a generic Riemannian manifold.
The present framework addresses this by separating metric structure from causal ordering. Causal ordering does not arise from the Fisher metric. Instead, it enters prior to geometry through the directed structure of relational transformations introduced in Section 3. Admissible morphisms compose asymmetrically, providing a primitive notion of precedence between relational configurations. Effective time is identified with coarse-grained ordering along chains of such transformations, not with a coordinate direction of the information metric.
Accordingly, the Fisher metric should be interpreted as encoding spatial and configurational distinguishability among macroscopic relational states. A full Lorentzian spacetime structure is expected to emerge only after combining this information geometry with directed, irreversible aspects of relational evolution, such as entropy production, modular flow associated with relative entropy, or asymmetric response along preferred update directions.
The emergence of Lorentzian signature and light-cone structure is therefore deferred to future work. This limitation does not weaken the present framework; rather, it clarifies that metric geometry and causality have distinct informational origins and need not emerge simultaneously.
4.5. Summary of the Statistical Layer
At the statistical level, constrained relational information gives rise to:
- Effective forces, defined as free-energy gradients with respect to coarse constraint parameters;
- Emergent geometry, realized as an information metric on the space of macroscopic relational states;
- A separation of roles between metric structure (information geometry) and causal ordering (directed relational dynamics).
Physical law is thus reinterpreted as a manifestation of constrained relational information dynamics rather than as a set of primitive interactions unfolding within a pre-defined spacetime background.
In this sense, “spacetime” refers to the geometry of coarse-grained relational state space under observational limitations, not to a fundamental arena.
End of Section 4—What Has Been Established
- Relational dynamics induce a well-defined statistical ensemble.
- Forces arise as entropic responses to constraint modulation.
- Spacetime geometry is identified with information geometry on coarse-grained states.
- Causality and metric structure have distinct informational origins.
5. Worked Example: Emergent Distance, Curvature, and Informational Force
To make the abstract constructions of the preceding sections concrete, we now present a minimal worked example in which distance, curvature-like structure, and an effective force arise explicitly from a finite relational constraint network. The purpose of this example is not phenomenological realism, but to demonstrate—within a fully specified and self-contained setting—that the framework yields nontrivial geometric and dynamical structure without assuming an underlying manifold, spacetime, or interaction fields.
The specific aim of this section is threefold: (i) to show explicitly how distance is induced from constraint-weighted accessibility, (ii) to exhibit curvature proxies arising from heterogeneity in constraint structure, and (iii) to demonstrate how a force-like response emerges from controlled modulation of constraints. In this sense, Section 5 grounds the preceding definitions in a fully computable mechanism rather than leaving them at the level of abstract construction.
5.1. Constraint Graph and Induced Metric
Consider a relational configuration G = (V, E, C) with node set
For simplicity, we take the relations to be undirected; the directed case differs only by accessibility asymmetry and does not affect the present illustration.
The admissible edges and their associated constraint weights are
As defined in Section 2, the effective distance between nodes is given by minimal constraint cost,
A direct computation yields
d(a, b) = 1, d(b, c) = 1,
d(a, d) = 2, d(c, d) = 2, d(b, d) = 3,
Two observations are immediate. First, the primitive relation (a, c) is not the dominant contributor to accessibility: nodes a and c are effectively closer via the composite path a→b→c than via their direct edge. This exemplifies the central principle of the framework: effective geometry is determined by relational accessibility rather than primitive adjacency.
Second, the induced distances satisfy the axioms of a metric by construction, despite the absence of any embedding or background geometry. Geometry has emerged entirely from the constraint structure.
5.2. Curvature Proxy via Distance Distortion
To diagnose curvature-like behavior without invoking a manifold, we compare primitive constraint weights to induced geodesic distances. Define the edge distortion
In the present graph,
while all other edges satisfy Δ = 0, since they already realize geodesics.
A nonzero distortion indicates that a primitive relation is redundant in the induced geometry: the effective metric “compresses” the direct edge in favor of a lower-cost composite path. In geometric terms, this reflects the emergence of nontrivial connectivity and curvature-like structure arising from heterogeneous constraints.
5.3. Transport-Based Curvature: Ollivier–Ricci Curvature
To quantify curvature more systematically, we employ Ollivier–Ricci curvature, an intrinsic curvature notion for metric spaces defined via optimal transport and directly sensitive to constraint-weighted accessibility.
For each node x ∈ V, define a local probability distribution over its neighbors,
Let W1(mx, my) denote the 1-Wasserstein distance between mx and my, computed using the emergent metric d. The Ollivier–Ricci curvature along the pair (x, y) is then defined as
Positive curvature corresponds to convergent relational accessibility (neighboring neighborhoods are closer than expected), while negative curvature signals divergent accessibility. In this framework, curvature measures how constraint heterogeneity reshapes local information flow, independently of any embedding manifold.
5.4. Constraint Modulation and Informational Action
To connect geometry with dynamics, introduce a coarse-grained control parameter x ≥ 0 that strengthens a bottleneck constraint, modeling an imposed restriction on information flow. Specifically, modify
while leaving all other constraint weights unchanged.
The induced distance becomes
Equivalently,
At x = 1, the dominant geodesic switches discontinuously from the composite path a→b→c to the direct edge (a, c). This geodesic switching is a purely relational phenomenon and does not rely on any background geometry.
Define a minimal coarse-grained informational action that penalizes reduced accessibility between nodes a and c,
with α > 0 setting units.
5.5. Emergent Force as an Informational Gradient
Following the statistical framework of Section 4, the effective force conjugate to the parameter x is defined as
Using the piecewise form above,
The discontinuity at x = 1 reflects the change in dominant relational pathway. This illustrates the central claim of the framework: what appears as a force in an effective description can arise purely as a system-level response to changing constraints on relational information flow. No spacetime, potential field, or fundamental interaction has been postulated.
In more realistic settings—where many relational pathways contribute and coarse-graining smooths the free-energy landscape—such forces become differentiable and admit continuum approximations. The present example isolates the mechanism in its simplest discrete form.
5.6. Interpretation and Generalization
This worked example demonstrates, in a fully explicit and unambiguous setting:
- Emergent geometry: a consistent metric arises from relational constraints alone.
- Curvature-like structure: constraint heterogeneity produces measurable distortions and transport curvature.
- Emergent force: effective forces arise as informational gradients under constraint modulation.
These mechanisms persist and become richer in larger graphs, in directed settings (where accessibility asymmetry supports causal structure), and in statistical ensembles of relational configurations, where information geometry yields smooth emergent spacetimes.
End of Section 5—What Has Been Established
- Distance, curvature, and force arise from a finite relational constraint network.
- Geodesic switching provides a concrete mechanism for emergent interaction.
- No background spacetime, fields, or particles are required.
6. Emergent Particles, Quantum Field–Theoretic States, and Scattering
The framework developed so far treats relational information and its constraints as fundamental, while geometry, forces, and spacetime arise only after coarse-graining. Within this hierarchy, particles cannot be primitive entities. Instead, particle-like excitations emerge as stable, localized patterns within the relational substrate. This section makes that emergence explicit and explains how familiar quantum field–theoretic notions—vacuum states, particle propagation, and scattering—arise as effective descriptions of relational dynamics.
The purpose of this section is interpretive and structural rather than phenomenological. We identify a minimal mechanism—stable relational motifs under admissible rewrite dynamics—that can support particle-like persistence and interaction under shared constraints. No claim is made that full quantum field–theoretic amplitudes or renormalization structures are derived here; rather, we show how their structural prerequisites can arise within the relational substrate.
6.1. Particles as Stable Relational Motifs
At the fundamental level, a relational configuration G = (V, E, C) contains no distinguished objects corresponding to particles. Nodes represent degrees of freedom, not material objects. Particle-like entities instead emerge as stable relational motifs.
Formally, let H ⊂ G be a connected subgraph. We say that H corresponds to a particle if it satisfies the following conditions:
- Stability.
H is invariant, up to small deformations, under admissible relational transformations. Equivalently, its contribution to the informational action S(G) is locally extremal with respect to perturbations supported in a neighborhood of H.
- 2.
- Localization.
Once an emergent metric structure exists (Section 2), the support of H is contained within a bounded relational neighborhood with respect to the emergent distance d.
- 3.
- Persistence under coarse-graining.
When relational configurations are coarse-grained to macroscopic variables, H remains identifiable as a distinct excitation rather than being averaged away.
Under these conditions, H functions as a particle: it is a persistent, localized pattern of constrained information flow. Importantly, particles are patterns of relations, not nodes, and therefore do not exist prior to the emergence of effective geometry.
6.2. Vacuum and One-Particle States
To connect with quantum field theory, we introduce a reference relational macrostate G0 characterized by maximal symmetry or minimal informational tension—for example, a homogeneous distribution of constraints. This state plays the role of an effective vacuum.
A one-particle state corresponds to the presence of a single stable motif Hα embedded in this background. At the coarse-grained level, such a state may be denoted schematically by
where the label α distinguishes inequivalent motif types, for instance by symmetry class or stability properties.
When motif density is low and effective separations are large, multiple motifs coexist approximately independently. This yields a natural Fock-like structure:
recovering the standard interpretation of multi-particle states as collections of weakly interacting excitations. This construction is approximate and emergent; it holds only in regimes where motif interactions are negligible.
6.3. Propagation, Mass, and Propagators
Particle propagation corresponds to the persistence of a motif across successive relational configurations. A motif “moves” when admissible transformations shift the relational neighborhood in which it is localized while preserving its internal structure.
The effective mass of a particle reflects the rigidity of the corresponding motif. If ξ parametrizes deformations of Hα, then its mass scale is determined by the curvature of the informational action,
Motifs that resist reconfiguration more strongly appear heavier at the effective level.
An effective propagator is obtained by summing over relational histories in which a motif persists between two coarse-grained configurations. Schematically,
where x and y label emergent spacetime points associated with coarse-grained relational neighborhoods. In regimes where a continuum description applies, this construction reproduces the role of field-theoretic Green’s functions.
6.4. Charges and Internal Quantum Numbers
Charges and other internal quantum numbers arise from symmetry properties of motifs. If a motif Hα is invariant under a class of constraint-preserving transformations—automorphisms of the relational structure—then the corresponding symmetry labels function as conserved charges.
Conservation laws follow because admissible relational transformations preserve these symmetry classes. In this sense, Noether-like results emerge categorically: invariance of the informational action under relational transformations implies conservation of motif properties in effective dynamics.
6.5. Scattering as Motif Interaction and Constraint Re-Routing
Scattering processes occur when two or more motifs approach sufficiently closely that their relational neighborhoods overlap. In this interaction region, constraint capacities are redistributed and shortest relational paths are re-routed. Because the informational action depends on the full constraint configuration, modifications within the shared neighborhood alter the effective stability conditions of both motifs, producing a genuine coupling at the coarse-grained level. As a result, incoming motifs may deform, merge, or reorganize into a new collection of stable motifs.
At the effective level, this corresponds to transitions of the form
analogous to particle scattering in quantum field theory.
Formally, scattering amplitudes arise from overlaps between coarse-grained “in” and “out” states,
where each state represents a superposition of relational configurations consistent with specified asymptotic motif content. The S-matrix thus emerges as an effective object encoding probabilities for motif reconfiguration under constrained relational dynamics.
6.6. Summary: Matter as Emergent Relational Structure
Within the relational information framework, particles are neither fundamental nor absent. They arise as stable, localized motifs of constrained information flow, identifiable only after geometry and spacetime have emerged as effective descriptions. Quantum field–theoretic particle states correspond to coarse-grained normal modes of these motifs, while propagation and scattering reflect the persistence and interaction of relational patterns.
Particles therefore occupy the same emergent ontological status as spacetime and forces, completing the hierarchy proposed in this work and addressing directly the question of how matter arises in a fundamentally relational theory.
6.7. Numerical Extension: Emergence of Smooth Geometry in Large Relational Graphs
The four-node construction of Section 5 isolates the basic mechanisms by which distance, curvature, and informational forces arise from relational constraints. To verify that these mechanisms persist beyond minimal examples and admit a smooth macroscopic limit, we now consider a numerical extension to larger relational graphs. The goal of this subsection is to establish robustness and scalability rather than detailed phenomenology.
6.7.1. Graph Ensembles and Constraints
We consider ensembles of undirected relational graphs G = (V, E, C),with node number N ranging from 50 to 500. Graph connectivity is generated using random graphs with fixed mean degree, supplemented by minimal rewiring to ensure global connectivity. Constraint weights C(e) are assigned independently from a strictly positive distribution, ensuring finite relational distances.
No geometric embedding, spatial coordinates, or background manifold are introduced. All observables are derived solely from relational constraints and the induced shortest-path structure defined in Section 2.
6.7.2. Emergent Distance and Effective Dimensionality
For each graph realization, the emergent distance d is computed via the shortest-path cost. Effective dimensionality is estimated using relational ball growth. For a reference node i, we define
and average this quantity over multiple reference nodes.
As graph size increases, N(r) exhibits a stable intermediate regime consistent with approximate power-law scaling,
from which an effective dimension Deff is inferred. Numerical results show that Deff stabilizes as N grows, indicating that dimensionality emerges as a collective property of relational accessibility rather than as an imposed structure.
The numerical value of the effective dimension depends on graph size, constraint distribution, and sampling scale; the robust feature is the emergence of a scaling regime itself, not convergence to a universal dimension.
Figure 2 illustrates representative ball-growth curves for increasing graph sizes.
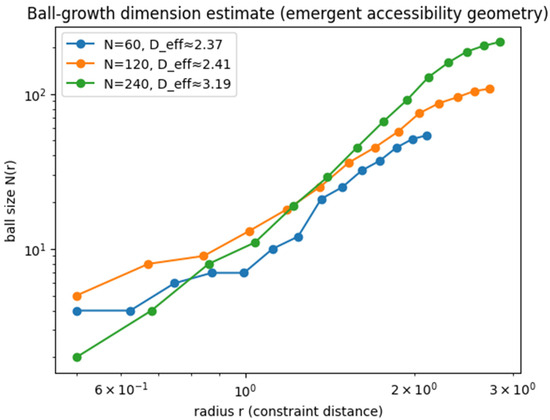
Figure 2.
Ball-growth dimension estimate. Log–log plot of relational ball size N(r) versus distance r for increasing graph sizes. The fitted slope defines an effective emergent dimension.
6.7.3. Curvature Statistics
Local curvature is quantified using the Ollivier–Ricci curvature introduced in Section 5, computed from optimal transport between constraint-weighted neighborhood distributions. Rather than focusing on individual edges, we analyze curvature statistics across each graph.
For small graphs, curvature distributions are broad, reflecting strong local heterogeneity and discrete geodesic switching. As graph size increases, these distributions narrow and converge toward stable ensemble-dependent profiles. This indicates that smooth curvature arises statistically under coarse-graining, even though the underlying relational structure remains discrete.
Curvature distributions for representative graph sizes are shown in Figure 3.
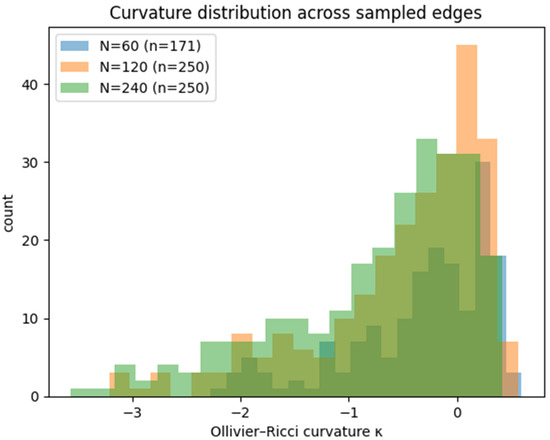
Figure 3.
Ollivier–Ricci curvature distributions. Histograms of curvature values for sampled edges, showing narrowing and stabilization as graph size increases.
6.7.4. Smooth Informational Response
To probe emergent forces, we introduce a coarse-grained control parameter λ that strengthens constraints along a sparse bottleneck region of the graph. For each value of λ, we evaluate the informational action S(Gλ) by averaging relational distances over randomly sampled node pairs.
As in Section 4, the effective force is defined as the informational response
In contrast to the discontinuous force observed in the four-node example, numerical results show that for large graphs the force becomes smooth and differentiable. Discrete geodesic switching persists microscopically but averages out at the macroscopic level, yielding continuous effective behavior consistent with the entropic-response framework.
Representative force curves are shown in Figure 4.
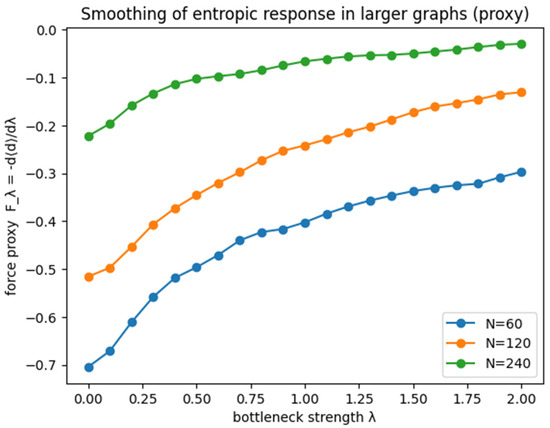
Figure 4.
Smooth entropic response. Effective force Fλ as a function of bottleneck strength λ, showing increasing smoothness with graph size.
6.7.5. Role of the Numerical Study
The numerical extension is not intended as a detailed physical model. Its purpose is to demonstrate that the relational information framework:
- scales beyond toy examples,
- supports stable emergent dimension and curvature,
- and yields smooth macroscopic forces under coarse-graining.
A reference implementation of the numerical procedures used in this subsection is provided in Appendix A.
End of Section 6—What Has Been Established
- Particles are stable relational motifs, not primitive entities.
- Vacuum and multi-particle states arise from coarse-grained relational configurations.
- Mass reflects motif rigidity under relational reconfiguration.
- Propagation corresponds to persistence across relational histories.
- Scattering emerges from constraint re-routing and motif interaction.
- Large relational graphs exhibit stable emergent dimension, curvature, and smooth informational forces.
- Matter, spacetime, and forces arise from a single relational information substrate.
7. Relation to Existing Approaches to Emergent Spacetime
Section 5 and Section 6 established concrete mechanisms for emergent geometry and structural matter-like excitations; the present section situates these results relative to existing approaches.
The relational information framework developed in this work shares motivations with several major approaches to quantum gravity and emergent spacetime, while differing from them at the level of foundational primitives. In this section we clarify points of contact and distinction with loop quantum gravity, holographic dualities, and causal set theory, emphasizing the role of relational information constraints as opposed to geometric or causal structures taken as fundamental.
7.1. Loop Quantum Gravity
Loop quantum gravity (LQG) is a background-independent approach in which spacetime geometry is quantized, with areas and volumes promoted to operators and discrete spin networks interpreted as the fundamental carriers of spatial geometry [8,9,13]. The present framework shares with LQG a rejection of background spacetime and a commitment to discrete underlying structure.
The similarity, however, is limited. In LQG, geometry remains fundamental: adjacency, area spectra, and volume eigenvalues are present from the outset and subsequently quantized. By contrast, the framework proposed here does not quantize geometry. Geometry is not assumed at the fundamental level at all. The relational substrate encodes only constraints on informational accessibility between degrees of freedom, without presupposing spatial adjacency or extension. Geometric quantities arise only after coarse-graining and representation through suitable mappings.
In this sense, the present framework may be regarded as logically prior to LQG. Loop quantum gravity operates within a regime in which relational structure has already been reinterpreted geometrically; the present work addresses the origin of that reinterpretation itself.
7.2. Holography and Gauge/Gravity Duality
Holographic dualities, most notably gauge/gravity duality, provide compelling evidence that spacetime geometry and gravitational dynamics can emerge from non-gravitational degrees of freedom, with entanglement structure playing a central role [1,2,3,4,14,15]. These results strongly support the non-fundamentality of geometry.
The relational information framework is compatible with this insight but does not rely on the specific assumptions of holographic constructions. Holography typically presupposes a boundary theory, a bulk description, and a well-defined correspondence between the two. Geometry emerges through a specific mapping between entanglement measures and spatial connectivity.
By contrast, the present framework does not assume a boundary, a bulk, or a dual field theory. Geometry emerges generically from constraints on relational accessibility, without requiring a pre-specified dimensional reduction or correspondence principle. From this perspective, holographic dualities can be understood as special cases of a broader phenomenon: the compression of relational information into lower-dimensional effective descriptions.
Rather than competing with holography, the present framework aims to clarify why holographic behavior is possible and why geometric quantities are naturally tied to information-theoretic measures.
7.3. Causal Set Theory
Causal set theory posits that spacetime is fundamentally discrete and structured by a partial order encoding causal relations, from which geometry is recovered together with local finiteness conditions. The present framework shares with causal set theory the rejection of continuum spacetime and the use of discrete relational structures.
The key difference lies in the treatment of causality. In causal set theory, causal order is fundamental and defines the temporal structure of spacetime. In the relational information framework, no primitive causal order is assumed. Directed relations encode constraints on information flow, but temporal ordering emerges only at the level of composed relational transformations. Causality is therefore interpreted as an effective ordering of relational updates rather than as a fundamental relation.
This generalization allows for relational structures that do not admit a global causal ordering at the fundamental level, while still recovering effective causal behavior in appropriate macroscopic regimes [16].
7.4. Summary
The distinguishing feature of the present framework is its choice of fundamental primitive. Whereas loop quantum gravity treats geometry as quantized, holography relies on specific dualities between geometric and non-geometric descriptions, and causal set theory elevates causal order to fundamental status, the approach developed here treats relational information and its constraints as the sole fundamental entities.
Geometry, force, spacetime, and causality emerge as effective, representational structures arising from constrained relational information dynamics. Existing approaches are therefore not contradicted, but repositioned as effective theories operating within particular regimes of the relational substrate.
8. Discussion, Limitations, and Falsifiable Expectations
The framework proposed in this work represents a shift in foundational perspective rather than a complete physical theory. Its purpose is to clarify what may be regarded as fundamental and what may be regarded as emergent in physical description. In this final section we delineate scope, limitations, and structural expectations.
8.1. Scope of the Framework
The relational information framework is not intended as a replacement for existing physical theories, nor does it aim to reproduce known phenomenology directly. Instead, it provides a pre-theoretic foundation from which effective geometric, dynamical, and field-theoretic descriptions may arise. Its role is analogous to that of statistical mechanics relative to thermodynamics: it explains why certain macroscopic structures appear, without fixing their detailed form.
Claims made in this work concern the existence and emergence of geometry, force, spacetime, and particle-like excitations, not their detailed phenomenological realization.
8.2. Limitations and Open Problems
Several limitations of the present framework are explicit.
First, while an emergent Riemannian information geometry is established, the emergence of full Lorentzian spacetime—including metric signature and light-cone structure—requires a deeper integration of directed relational dynamics, entropy production, and temporal asymmetry [5,6,17].
Second, the framework does not yet yield explicit gravitational field equations. Deriving effective dynamics analogous to Einstein’s equations from constrained relational information remains an open challenge.
Third, while particle-like excitations and scattering are described conceptually as stable relational motifs and their interactions, a detailed derivation of standard quantum field–theoretic amplitudes and renormalization behavior is deferred to future work.
These limitations reflect the foundational nature of the approach rather than internal inconsistency.
8.3. Structural and Falsifiable Expectations
Although the framework does not predict new particles or immediate experimental signatures, it leads to qualitative and structural expectations that constrain effective theories:
- Breakdown of geometric description: Smooth spacetime geometry is expected to fail in regimes of strong constraint inhomogeneity, suggesting that classical singularities correspond to the breakdown of geometric coarse-graining rather than physical divergence.
- Scale-dependent dimensionality: Effective dimensionality is inferred from relational scaling and may vary with scale or physical regime, consistent with dimensional reduction observed in several quantum gravity approaches [18,19].
- Universality of interactions: If forces arise as responses to informational gradients, interaction laws should exhibit robustness across microscopic realizations, with deviations signaling departures from symmetry or homogeneity in relational constraints.
- Limits of causality: Since causality is emergent, causal structure may become ill-defined in regimes where relational transformations cannot be consistently ordered [20].
These expectations are structural rather than numerical, but they delimit where and how effective geometric descriptions should apply.
Concrete overlap with established physical structure. The accessibility distance defined in this work coincides mathematically with effective transport distance in weighted networks, a quantity that is operationally defined and experimentally measured in electrical, diffusive, and thermal systems. When relational constraints are varied by a control parameter λ, the resulting change in coarse-grained accessibility induces a response of the form which is identical to the linear-response relation connecting applied constraints to observable transport responses. This correspondence does not rely on gravitational or quantum assumptions and requires no additional dynamical postulates. It shows that the relational mechanism underlying the framework already reproduces a well-established physical structure used in laboratory systems, with geometry and force emerging as effective descriptors of constrained accessibility rather than as primitive ingredients.
Emergent Newtonian dynamics as a coarse-grained limit. Although no fundamental laws of motion are postulated at the relational level, familiar dynamical principles arise in appropriate coarse-grained regimes. Particle-like entities are identified with stable relational motifs whose persistence across relational transformations defines effective propagation. In the absence of gradients in the informational action, such motifs follow stationary accessibility paths, corresponding to inertial motion. When informational constraints vary smoothly across relational neighborhoods, effective forces arise as gradients of the informational action with respect to coarse-grained parameters, yielding a linear-response relation between constraint gradients and changes in propagation. In this regime, the resistance of a motif to reconfiguration plays the role of inertial mass, and the resulting dynamics reproduces the structural content of Newton’s first and second laws as emergent, approximate descriptions rather than fundamental postulates.
Emergent fractality of effective geometry. In the present framework, geometric structure is inferred operationally from the scaling of relational accessibility rather than postulated a priori. Effective dimension is defined through the growth of accessible degrees of freedom within a given constraint-distance, and no requirement is imposed that this scaling be integer-valued or scale-invariant. As a result, when relational constraint distributions exhibit heterogeneity or long-range correlations across scales, the induced geometry generically displays non-integer or scale-dependent effective dimensionality. Fractal or multifractal spacetime structure, therefore, arises naturally as a geometric phase of constrained relational information, indicating a regime in which smooth manifold descriptions break down rather than a failure of the underlying relational dynamics. Smooth spacetime geometry appears only as a special coarse-grained limit in which relational constraints become approximately homogeneous.
8.4. Conclusions
This work has proposed a unified framework in which relational information and its constraints constitute the sole fundamental structure, while geometry, force, spacetime, and matter emerge as effective descriptions. Geometry was reinterpreted as constrained relational accessibility, forces as responses to informational gradients, spacetime as an information-geometric construct, and particles as stable motifs of constrained information flow.
By shifting attention from quantizing spacetime to understanding the conditions under which spacetime and physical law emerge, the framework offers a coherent and economical foundation for future work in quantum gravity and the foundations of physics. Its value lies not in immediate phenomenological output, but in clarifying the informational origins of the structures that effective physical theories describe.
Author Contributions
Conceptualization, C.G.B., M.A. and D.V.; methodology, C.G.B., F.N. and V.N.; software, F.N. and O.R.; validation, C.G.B., D.M. and V.N.; formal analysis, C.G.B., M.A. and D.V.; investigation, C.G.B., F.N. and D.M.; resources, V.N. and M.A.; data curation, F.N. and O.R.; writing—original draft preparation, C.G.B. and M.A.; writing—review and editing, all authors; visualization, O.R. and D.M.; supervision, M.A. and D.V.; project administration, V.N.; funding acquisition, F.N. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
No new experimental or observational data were generated in this study. The work is theoretical in nature, and all results follow from analytical constructions and illustrative numerical examples fully described in the manuscript.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| G = (V, E, C) | Relational configuration: nodes (V), relations (E), constraint weights (C) |
| V | Set of abstract degrees of freedom |
| E ⊂ V × V | Admissible relational links |
| C(e) | Constraint weight (cost, resistance, or inverse capacity) on relation (e) |
| d(i, j) | Emergent accessibility distance (minimal path cost) |
| ds(i, j) | Symmetrized accessibility distance |
| Relational neighborhood of radius ϵ | |
| S(G) | Informational action (global constraint-tension functional) |
| Ω | Space of admissible relational configurations |
| λ | Coarse-grained control parameter modulating constraints |
| F | Emergent force (informational response to constraint gradients) |
| κ(x, y) | Ollivier–Ricci curvature along relation (x, y) |
| QG | Quantum gravity |
| LQG | Loop quantum gravity |
| CDT | Causal dynamical triangulations |
Appendix A. Numerical Methods and Reproducibility
This appendix specifies the numerical procedures underlying the results reported in Section 6.7 and Figure 2, Figure 3 and Figure 4. The goal is reproducibility at the level of algorithmic choices and measured observables, without tying the paper to a particular software stack.
Appendix A.1. Graph Ensemble and Constraint Assignment
Each numerical instance is an undirected weighted relational graph G = (V, E, C) with ∣V∣ = N. Graphs are sampled from a simple random ensemble and then constrained to be connected.
Connectivity model (example choice). We generate an Erdős–Rényi graph GER(N, p) with target mean degree by setting . If the sampled graph is disconnected, we either resample or connect components by adding minimal bridging edges.
Constraint weights. Each edge e ∈ E is assigned a strictly positive weight
where is a positive distribution (e.g., exponential, log-normal, or uniform on [cmin, cmax]). Strict positivity ensures finite path costs and avoids degenerate zero-distance artifacts.
Example defaults used in the figures (editable):
- N ∈ {60, 120, 240} (or N ∈ [50, 500] for sweeps)
- ∈ [6, 10]
- = Exponential (mean = 1) or Uniform (0.5, 2.0)
- number of graph realizations: R ∈ [10, 50]
These choices are not special; the reported qualitative behaviors persist across broad parameter ranges.
Appendix A.2. Distance Computation
For each graph instance, emergent accessibility distance d(i, j) is computed as the shortest-path cost induced by C, exactly as defined in the main text. Numerically, this is implemented by running Dijkstra’s algorithm from sampled source nodes (or all nodes if N is small enough).
To reduce compute cost at large N, we do not require an all-pairs distance matrix: the observables below only need distances from a set of sampled source nodes and distances between a set of sampled node pairs.
Appendix A.3. Observables Corresponding to Figure 2, Figure 3 and Figure 4
Appendix A.3.1. Effective Dimension by Relational Ball Growth (Figure 2)
For a chosen seed node i, define the ball size
We compute N(r) by averaging over seed nodes and graph realizations.
Log–log slope estimate. We estimate an effective dimension Deff on an intermediate scale window [rmin, rmax] where N(r) is neither saturated (finite-size ceiling) nor dominated by microscopic discreteness. On that window we fit
by least squares.
Important note (interpretation). The numerical value of Deff depends on ensemble choice and finite-size effects; the robust feature is the emergence of a scaling regime in which a meaningful slope can be estimated without assuming an embedding space.
Appendix A.3.2. Ollivier–Ricci Curvature Statistics (Figure 3)
We compute Ollivier–Ricci curvature along sampled edges (x, y) ∈ E using the standard neighborhood-transport definition.
Local neighborhood measures. For each node x, define a probability distribution over neighbors z ∼ x by a constraint-weighted kernel
where α > 0 is a “locality” inverse-temperature parameter controlling how strongly high-cost edges are suppressed in neighborhood sampling.
Transport distance. The Wasserstein-1 distance W1(mx, my) is computed using the emergent graph distance d as the ground cost. (In practice, we restrict transport to supports on the neighbor sets of x and y, which are small for bounded degree.)
Curvature. For each edge (x, y), curvature is
We report curvature as distributions (histograms) over sampled edges and graph realizations, which is the appropriate coarse-grained observable in a heterogeneous discrete setting.
Example defaults:
- α = 1
- sample M edges per graph realization (e.g., M = 2000 or all edges if small)
Appendix A.3.3. Smooth Informational Force Response (Figure 4)
To probe entropic/action-gradient response, we introduce a single control parameter λ ≥ 0 that strengthens constraints on a designated subset of edges B ⊂ E (a “bottleneck set”). We define a λ—dependent graph Gλ by
Choice of bottleneck edges. A simple choice is to select a small fraction fB of edges uniformly at random. More structured choices (e.g., cut-set edges separating two node clusters) produce stronger responses; both are compatible with the framework.
Macroscopic action proxy. For each λ, define a coarse-grained action proxy by averaging distances between randomly sampled node pairs:
where is a distribution over node pairs (typically uniform over pairs), and α0 > 0 is a scale factor (optional).
Force estimate. The effective force is the numerical derivative
approximated by finite differences on a grid λ ∈ {λ0, λ1, … }.
Example defaults.
- fB ∈ [0.01, 0.05]
- λ grid: 0 to 2 in steps of 0.05 (or coarser)
- sample P node pairs per λ (e.g., P = 2000–20,000, depending on N)
Interpretation. For small graphs, discrete geodesic switching can produce non-smooth responses. As N increases and many alternative pathways contribute, the macroscopic response becomes smooth under averaging—precisely the behavior illustrated in Figure 4.
Appendix A.4. Algorithms (Pseudocode)
| Algorithm A1: Graph generation with constraint weights |
| Input: N, , Output: connected weighted graph G = (V, E, C)
|
| Algorithm A2: Ball growth and effective dimension (Figure 2) |
| Input: graph G, seed count S, radius grid {rj} Output: averaged ball curve N(r), fitted Deff
|
| Algorithm A3: Curvature histogram and force response (Figure 3 and Figure 4) |
| Input: G, parameters α, edge samples M, bottleneck fraction fB, λ, pair samples P Output: curvature samples {κ}, force curve {Fλ} Curvature:
|
Appendix A.5. Reproducibility Notes
- Results should be averaged over multiple graph realizations R to suppress instance-level fluctuations.
- Random seeds should be recorded for graph sampling, bottleneck selection, edge sampling, and pair sampling.
- The qualitative trends reported in Section 6.7 (emergent scaling regime, stable curvature statistics, smoothing of force response) persist across a wide range of ensemble parameters.
Appendix A.6. Implementation Note
The constructions introduced in this work are readily implementable using standard numerical tools for graph analysis, optimal transport, and statistical inference. No specialized or proprietary algorithms are required.
At the relational level, weighted graphs with nonnegative edge costs can be represented using common graph data structures, and emergent accessibility distances are obtained via standard shortest-path algorithms. In practical implementations, widely used graph libraries (e.g., those supporting Dijkstra or Bellman–Ford methods) provide efficient routines for computing constraint-induced distances and neighborhood growth statistics.
Curvature observables based on transport between local accessibility distributions, such as Ollivier–Ricci curvature, can be evaluated using standard optimal transport solvers. Entropic-regularized or exact Wasserstein distances between discrete distributions may be computed with existing optimal transport libraries, without requiring modifications specific to the present framework.
Statistical ensembles over relational configurations and coarse-grained observables can be sampled using conventional Markov-chain or Monte-Carlo methods, while information-geometric quantities may be estimated using standard numerical differentiation and expectation-value techniques.
These implementation choices are illustrative rather than prescriptive. The framework is algorithm-agnostic and does not rely on any particular software ecosystem; equivalent implementations can be realized in a variety of numerical environments depending on application and scale.
References
- Maldacena, J. The Large-N Limit of Superconformal Field Theories and Supergravity. Int. J. Theor. Phys. 1999, 38, 1113–1133. [Google Scholar] [CrossRef]
- Ryu, S.; Takayanagi, T. Holographic Derivation of Entanglement Entropy from AdS/CFT. Phys. Rev. Lett. 2006, 96, 181602. [Google Scholar] [CrossRef] [PubMed]
- Van Raamsdonk, M. Building up spacetime with quantum entanglement. Gen. Relativ. Gravit. 2010, 42, 2323–2329. [Google Scholar] [CrossRef]
- Swingle, B. Entanglement Renormalization and Holography. Phys. Rev. D 2012, 86, 065007. [Google Scholar] [CrossRef]
- Jacobson, T. Thermodynamics of Spacetime: The Einstein Equation of State. Phys. Rev. Lett. 1995, 75, 1260. [Google Scholar] [CrossRef] [PubMed]
- Jacobson, T. Entanglement Equilibrium and the Einstein Equation. Phys. Rev. Lett. 2016, 116, 201101. [Google Scholar] [CrossRef] [PubMed]
- Verlinde, E. On the origin of gravity and the laws of Newton. J. High. Energ. Phys. 2011, 2011, 29. [Google Scholar] [CrossRef]
- Rovelli, C. Quantum Gravity; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Ashtekar, A.; Lewandowski, J. Background Independent Quantum Gravity: A Status Report. Class. Quant. Grav. 2004, 21, R53. [Google Scholar] [CrossRef]
- Sorkin, R.D. Causal Sets: Discrete Gravity. In Lectures on Quantum Gravity; Gomberoff, A., Marolf, D., Eds.; Springer: Berlin/Heidelberg, Germany, 2003; pp. 305–327. [Google Scholar] [CrossRef]
- Dowker, H.F. Causal Sets and the Deep Structure of Spacetime. In 100 Years of Relativity Space-Time Structure: Einstein and Beyond; Ashtekar, A., Ed.; World Press Scientific: Singapore, 2005. [Google Scholar] [CrossRef]
- Wüthrich, C. The emergence of space and time. In Sophie Gibb, Robin Hendry & Tom Lancaster, The Routledge Handbook of Philosophy of Emergence; Routledge: New York, NY, USA, 2018. [Google Scholar]
- Dittrich, B. The continuum limit of loop quantum gravity-a framework for solving the theory. In Loop Quantum Gravity: The First 30 Years; World Scientific: London, UK, 2017; pp. 153–179. [Google Scholar] [CrossRef]
- Rangamani, M.; Takayanagi, T. Holographic Entanglement Entropy. In Holographic Entanglement Entropy; Lecture Notes in Physics; Springer: Cham, Switzerland, 2017; Volume 931. [Google Scholar] [CrossRef]
- Lashkari, N.; McDermott, M.B.; Van Raamsdonk, M. Gravitational dynamics from entanglement “thermodynamics”. J. High. Energ. Phys. 2014, 2014, 195. [Google Scholar] [CrossRef]
- Oreshkov, O.; Costa, F.; Brukner, Č. Quantum correlations with no causal order. Nat. Commun. 2012, 3, 1092. [Google Scholar] [CrossRef]
- Connes, A.; Rovelli, C. Von Neumann algebra automorphisms and time-thermodynamics relation in general covariant quantum theories. Class. Quantum Gravity 1994, 11, 2899–2918. [Google Scholar] [CrossRef]
- Carlip, S. Spontaneous dimensional reduction in quantum gravity. AIP Conf. Proc. 2009, 1196, 72–80. [Google Scholar] [CrossRef]
- Ambjørn, J.; Jurkiewicz, J.; Loll, R. The Spectral dimension of the universe is scale dependent. Phys. Rev. Lett. 2005, 95, 171301. [Google Scholar] [CrossRef]
- Naaijkens, P. Local Quantum Physics. In Quantum Spin Systems on Infinite Lattices; Lecture Notes in Physics; Springer: Cham, Switzerland, 2017; Volume 933. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.