Abstract
This paper is concerned with collocation methods for one class of impulsive delay differential equations (IDDEs). Some results for the convergence, global superconvergence and local superconvergence of collocation methods are given. We choose a suitable piecewise continuous collocation space to obtain high-order numerical methods. Some illustrative examples are given to verify the theoretical results.
Keywords:
impulsive delay differential equations; collocation methods; convergence; superconvergence MSC:
65L03
1. Introduction
Impulsive differential equations appear to represent models of several real-life phenomena. In recent decades, systems with impulse effects have arisen in control theory, medicine, biotechnology, economics, population growth, etc. Some work on these systems was presented [1,2,3,4,5]. In recent years, there has been increasing attention on the initial value problem of IDDEs. The corresponding theory of the exact solutions of IDDEs has been studied from different angles (see [6,7,8,9,10,11,12]): oscillation, stability, asymptotic stability and exponential stability in some specific classes of IDDEs.
Collocation methods as numerical methods have a wide range of applications in the treatment of integral–algebraic equations [13,14,15,16], Volterra integral equations [17,18,19] and delay differential equations [20,21,22]. Specifically, the convergence of the collocation methods has received a lot of attention, such as the convergence of collocation methods for weakly singular Volterra integral equations [23], the superconvergence of collocation methods for first-kind Volterra integral equations [24], the convergence of collocation methods for Volterra integral equations [25], the convergence of multistep collocation methods for integral–algebraic equations [16], etc. But to the best of our knowledge, there are no articles referring to the convergence of the collocation method for IDDEs.
In this paper, we consider the following impulsive delay differential equation with collocation methods:
where , , is the right limit of , are two given functions and sufficiently smooth, is a positive constant, is a continuous function on and denotes the left-hand derivative of .
The rest of the present paper is organized as follows: Firstly, the existence and uniqueness of collocation methods are presented in Section 2. In Section 3, the global convergence of collocation methods is analytically derived. Following that, Section 4 gives the global and local superconvergence of properties. Finally, two numerical experiments are given in Section 5.
Definition 1
(Jurang Yan [8]). The function is said to be a solution of system (1) when the following conditions are satisfied:
- ;
- for , the function is differentiable and ;
- the function is left-continuous in I, and if and , then , ;
- are constants, .
2. Collocation Methods
For ease of notation, we assume that , N is a positive integer. All , , are chosen as numerical nodes to ensure the convergence of collocation methods. Define a positive integer and the stepsize corresponding to the given intervals . are fixed time. The global mesh on I is defined by
Firstly, we will choose the collocation points as follows:
where indicates a series of collocation parameters. Define . The exact solution can be approximated by a collocation solution in the piecewise polynomial space
where denotes the space of all real polynomials of degree not exceeding m (see [17,21]), and . The collocation solution is the element of the piecewise polynomial space that satisfies the following equation:
where and are left-continuous.
Setting , we have
where denotes the following Lagrange fundamental corresponding to the collocation parameters (see [17,21]):
Integrating (3), we can obtain
where
According to the definition of , we have
By (2) and (4), we obtain
where . Let
Then
When the solution has been found by (6), the collocation solution on the interval is determined by
According to [17], the following theorem is given without proof.
3. Global Convergence
In the following section, the global convergence of the collocation solution for IDDEs will be analyzed.
Theorem 2.
Proof.
Assume that implies and . The collocation error satisfies the equation
with . By Peano’s theorem [17], we can obtain that
where
and . Integrating (12), we have
where
and
Let . Comparing (4) and (13), we obtain
where
Due to (3) and (12), we can obtain that
By the definition of and (14), we obtain
i.e.,
where and . For ease of notation, we assume , then . By (14) and (15),
where , and
Hence,
where . In view of Theorem 1, we can easily obtain that the matrices have bounded inverses whenever , and there exists a constant such that
By (18),
4. Global Superconvergence and Local Superconvergence
In this part, the global superconvergence of the collocation solution is discussed first and the local superconvergence is analyzed later.
Theorem 3.
Let the given function in (1) satisfy , . Assume that the m collocation parameters are subject to the orthogonality condition
Then, the corresponding collocation solution on I satisfies the following conditions:
where , and are two constants which are independent of h.
Proof.
The (24) can be obtained with (21). The following discussion is for (23). We define the defect by
By (1), we can easily obtain the following form:
and for all . Due to Theorem 2, we can obtain that
for any in .
Here, can be treated as the solution of the following equation:
Let denote the resolvent of (1)
where . So, for we have
for we obtain
for we can obtain that
for can be expressed by
For ease of notation, we assume that and . Obviously, there exists a constant such that
From the above analysis, we have the following inequality:
where can be expressed as
Now, using an interpolatory m-point quadrature formula with collocation parameters to approximate , we have
where and indicates quadrature errors. So, we have
By the orthogonality condition (22) and the Peano theorem, it is obvious that quadrature errors satisfy
where are constants. According to (29), (31) and (32), we can obtain
where . By (27), we have
Theorem 4.
Assume that the solution of (1) lies in and the m distinct collocation parameters are selected such that the general orthogonality condition (33) holds, with ,
Then, for all meshes with , the collocation solution with the above collocation parameters satisfies
where is a constant and independent of h.
5. Numerical Experiments
In the last section, two examples are given to illustrate the conclusions. Consider two IDDEs as follows:
In Figure 1, the image of the 2-Lobatto IIIA collocation solution with for (38) is drawn. In Figure 2, we use the same method to draw the image for (39).
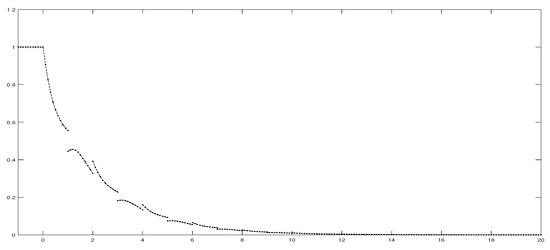
Figure 1.
Two-stage Lobatto IIIA for (38).
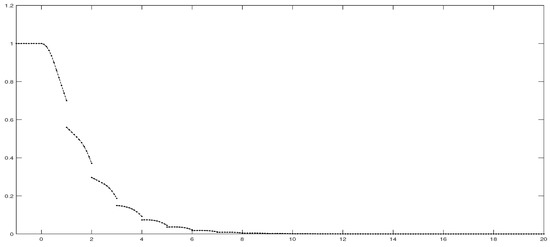
Figure 2.
Two-stage Lobatto IIIA for (39).
Table 1 and Table 2 illustrate the ratios of the absolute errors between and at non-impulsive nodes and impulsive nodes using four different collocation methods for (38). Table 3 and Table 4 illustrate the ratios of the absolute errors between and at non-impulsive nodes and impulsive nodes using four different collocation methods for (39). We can obtain that the convergence orders of the 2-Lobatto IIIA, 2-Radau IIA, 2-Gauss methods and 3-Gauss methods are and 6, respectively. The ratios indicate that our numerical process can preserve the convergence order of collocation methods for IDDEs.

Table 1.
The absolute error of 2-Lobatto IIIA and 2-Gauss methods for (38).
Table 2.
The absolute error of 2-Radau IIA and 3-Gauss methods for (38).
Table 3.
The absolute error of 2-Lobatto IIIA and 2-Gauss methods for (39).
Table 4.
The absolute error of 2-Radau IIA and 3-Gauss methods for (39).
Author Contributions
Conceptualization, Z.W.; Methodology, Z.W. Software, Z.W.; Validation, Z.W.; Formal analysis, Z.W.; Resources, G.Z.; Data curation, Z.W.; Writing—original draft, Z.W.; Writing—review&editing, Z.W. and G.Z.; Visualization, Z.W.; Supervision, G.Z.; Project administration, G.Z. and Y.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Akgöl, S.D. Oscillation of impulsive linear differential equations with discontinuous solutions. Bull. Aust. Math. Soc. 2023, 107, 112–124. [Google Scholar] [CrossRef]
- Liu, M.Z.; Liang, H.; Yang, Z.W. Stability of Runge-Kutta methods in the numerical solution of linear impulsive differential equations. Appl. Math. Comput. 2007, 192, 346–357. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, G.L.; Liu, M.Z. Analytic and numerical exponential asymptotic stability of nonlinear impulsive differential equations. Appl. Numer. Math. 2014, 81, 40–49. [Google Scholar] [CrossRef]
- Stamova, I.M.; Stamov, T.G. Impulsive effects on global stability of models based on impulsive differential equations with “supremum” and variable impulsive perturbations. Appl. Math. Mech. 2014, 35, 85–96. [Google Scholar] [CrossRef]
- Wen, Q.; Wang, J.R.; O’Regan, D. Stability analysis of second order impulsive differential equations. Qual. Theory Dyn. 2022, 21, 54. [Google Scholar] [CrossRef]
- Agarwal, R.P.; Karakoç, F. Oscillation of impulsive linear differential equations with discontinuous solutions. Comput. Math. Appl. 2010, 60, 1648–1685. [Google Scholar] [CrossRef]
- Bainov, D.D.; Dimitrova, M.B.; Dishliev, A.B. Oscillation of the solutions of a class of impulsive differential equations with deviating argument. J. Appl. Math. Stoch. Anal. 1998, 11, 95–102. [Google Scholar] [CrossRef]
- Yan, J.R. Stability for impulsive delay differential equations. Nonlinear Anal. Theory Methods Appl. 2005, 63, 66–80. [Google Scholar] [CrossRef]
- Yan, J.; Kou, C. Oscillation of solutions of impulsive delay differential equations. J. Math. Anal. Appl. 2001, 254, 358–370. [Google Scholar] [CrossRef]
- You, Z.L.; Wang, J.R. Stability of impulsive delay differential equations. J. Appl. Math. Comput. 2018, 56, 253–268. [Google Scholar] [CrossRef]
- You, Z.L.; Wang, J.R.; O’Regan, D. Asymptotic stability of solutions of impulsive multi-delay differential equations. Trans. Inst. Meas. Control 2018, 40, 4143–4152. [Google Scholar] [CrossRef]
- Zhang, G.L.; Song, M.H.; Liu, M.Z. Exponential stability of the exact solutions and the numerical solutions for a class of linear impulsive delay differential equations. J. Comput. Appl. Math. 2015, 285, 32–44. [Google Scholar] [CrossRef]
- Gao, H.C.; Liang, H. Discontinuous piecewise polynomial collocation methods for integral-algebraic equations of hessenberg type. Comput. Appl. Math. 2022, 41, 291. [Google Scholar] [CrossRef]
- Liang, H.; Brunner, H. Integral-algebraic equations: Theory of collocation methods I. SIAM J. Numer. Anal. 2013, 51, 2238–2259. [Google Scholar] [CrossRef]
- Liang, H.; Brunner, H. Integral-algebraic equations: Theory of collocation methods II. SIAM J. Numer. Anal. 2016, 54, 2640–2663. [Google Scholar] [CrossRef]
- Zhang, T.T.; Liang, H.; Zhang, S.J. On the convergence of multistep collocation methods for integral-algebraic equations of index 1. Comput. Appl. Math. 2020, 39, 294. [Google Scholar] [CrossRef]
- Brunner, H. Collocation Methods for Volterra Integral and Related Functional Differential Equations; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Li, Y.P.; Yang, Z.W.; Liang, H. Analysis of collocation methods for a class of third-kind auto-convolution Volterra integral equations. Math. Comput. Simul. 2022, 199, 341–358. [Google Scholar] [CrossRef]
- Zhang, R.; Liang, H.; Brunner, H. Analysis of collocation methods for generalized auto-convolution Volterra integral equations. SIAM J. Numer. Anal. 2016, 54, 899–920. [Google Scholar] [CrossRef]
- Brunner, H.; Liang, H. Stability of collocation methods for delay differential equations with vanishing delays. BIT Numer. Math. 2010, 50, 693–711. [Google Scholar] [CrossRef]
- Liang, H.; Brunner, H. Collocation methods for differential equations with piecewise linear delays. Commun. Pure Appl. Anal. 2012, 11, 1839–1857. [Google Scholar] [CrossRef]
- Yi, L.J.; Wang, Z.Q. A legendre-gauss-radau spectral collocation method for first order nonlinear delay differential equations. Calcolo 2016, 53, 691–721. [Google Scholar] [CrossRef]
- Liang, H.; Brunner, H. The convergence of collocation solutions in continuous piecewise polynomial spaces for weakly singular Volterra integral equations. SIAM J. Numer. Anal. 2019, 57, 1875–1896. [Google Scholar] [CrossRef]
- Liang, H.; Brunner, H. Discrete superconvergence of collocation solutions for first-kind Volterra integral equations. J. Integral Equ. Appl. 2012, 24, 359–391. [Google Scholar] [CrossRef]
- Liang, H.; Brunner, H. On the convergence of collocation solutions in continuous piecewise polynomial spaces for Volterra integral equations. BIT Numer. Math. 2016, 56, 1339–1367. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).