Abstract
This paper explores the novel concept of discontinuous unpredictable and Poisson-stable motions within impulsive inertial neural networks. The primary focus is on a specific neural network architecture where impulses mimic the structure of the original model, that is, continuous and discrete parts are symmetrical. This unique modeling decision aligns with the real-world behavior of systems, where voltage typically remains smooth and continuous but may exhibit sudden changes due to various factors such as switches, sudden loads, or faults. The paper introduces the representation of these abrupt voltage transitions as discontinuous derivatives, providing a more accurate depiction of real-world scenarios. Thus, the focus of the research is a model, exceptional in its generality. To study Poisson stability, the method of included intervals is extended for discontinuous functions and B-topology. The theoretical findings are substantiated with numerical examples, demonstrating the practical feasibility of the proposed model.
1. Introduction
The technology of neural computing networks has shown its effectiveness in solving problems of pattern recognition, data clustering, associative information retrieval in databases, and in a number of other applications [1,2,3,4,5,6,7].
Nowadays, there are many models and types of artificial neural networks, different in their structure and functionality. From the whole variety of neural network models described by second-order ordinary differential equations, inertial neural networks are distinguished. The original model was proposed by Babcock and Westervelt in 1986 [8]. In the next few years, many modified models of this neural network were investigated. Inertial neural networks use second-order differential equations to introduce the concept of inertia into the network’s dynamics. Inertia refers to the property of a system to resist changes in its state, including the rate of change of the state. By incorporating inertia, the network can better capture the temporal dependencies and dynamics in the data it processes. Compared to traditional first-order neural networks, inertial neural networks have higher complexity due to the inclusion of second-order differential equations. This complexity enables them to model more intricate temporal relationships in the data.
It is known that when receptors feel pain or a change in temperature, they transmit the corresponding signal (impulse) to the brain. Just like biological neurons, the state of an artificial network can be subject to instantaneous failures and abrupt changes at certain instants. To study the modeling of impact disturbances, moreover, to use them as a control action on neural processes, models with impulses are effective.
Impulsive networks are a type of model that incorporates “disruptions” in its computations. These networks are inspired by the way that neurons communicate in the brain, where information is transmitted in the form of impacts or discrete events rather than continuous signals. In an impulsive neural network, the processing is often event-driven, and neurons react when certain conditions are met.
Let , and be the sets of all natural and real numbers, and integers, respectively.
Inertial neural networks are of the following form [9,10]:
where , is the state variable of the ith neuron at time t; is called an inertial term of system (1); is the damping coefficient; is the rate with which the neurons self-regulate or reset their potential when isolated from inputs and other networks; the constant is the synaptic connection weight of the neuron j on the neuron i; is the activation function of incoming potentials of neuron j at time t; and is the external input of the network to the ith neuron.
In traditional neural networks, the focus is usually on continuous, smooth transformations of input data. However, in certain real-world scenarios, there are instances where a system experiences sudden impulses or changes. Impulsive neural networks address this by incorporating a mechanism to deal with such abrupt changes and disturbances. Researchers and developers have been working on impulsive inertial neural networks to improve their performance, efficiency, and applicability in real-world scenarios. There are a few studies and techniques for designing and training of these networks [11,12,13,14,15,16,17].
In [11], stabilization of delayed inertial neural networks based on impulses was investigated.
The reduced form of the model is the following inertial neural networks with impulsive control and time delay,
In [12], delayed inertial neural networks with impulsive effects were considered,
Considering impact actions as limits of continuous processes of short duration, one has to recognize that the functional structure of impulsive equations in the inertial systems has to be the same as for the differential ones. In many real-world situations, continuous processes can be interrupted by impulsive events or impacts. The symmetrical property ensures that the mathematical model used to describe these processes accurately captures their behavior, which is essential for understanding and predicting physical phenomena. Nevertheless, the impulsive equations of systems (2) and (3) are linear, while the original model is non-linear. That is, there is a strong dissonance between the structures of continuous and discrete compartments of the models (2) and (3). To bridge this gap, we are proposing the concept of symmetrical impulsive inertial neural networks, where the components of the impulsive equation mirror those of the differential one. Another essential deficiency of the models is jumps in the dynamics of the state variable, voltage. This is contradictory to the electrical laws of physics.
Thus, it is obvious, that for adequate analysis and application of an inertial neural network with impact actions, the models have to be elaborated. This is performed in the present research.
The inertial network system that we will consider has the following symmetrical form:
where components , , , , , and for , are of the type and the role as in system (1), and solutions and functions are from to In (4), the impulsive part is analogous to the differential part. That is, are the damping coefficients and the self-regulation constants for the units or reset of potentials when the units are isolating, respectively; , are impact activation vectors; , are the weights for connection between units j and i; and , are external impulses for the network.
Impulsive neural networks have attracted interest due to their ability to model certain real-world phenomena better. For instance, in some biological processes, impulses can represent abrupt changes in the system’s behavior [18,19,20,21]. The state variable of the model, voltage , cannot be given by a discontinuous function, while its derivatives and can. From system (4), it is seen that the physical laws related to neural network dynamics are completely satisfied in our research.
Recent research in the field of neuroscience has focused on the study of chaotic and recurrent signals within a network. The introduction of unpredictable and Poisson-stable functions is a notable development of the theory in [22,23,24]. Poisson-stable functions encompass a broad range of quasi-periodic, almost periodic, and periodic functions. The concept of unpredictability was introduced in 2016 [25], and it plays a significant role in the dynamics of neural networks. Trajectories are characterized as Poincaré chaotic, and provide a strong basis for the perspective of research considering both the theoretical and practical implications of sophisticated behavior. It is a powerful instrument for chaos indication [24].
The proof of Poisson stability is based on the method of included intervals, which was considered in [24,26] and appears to be an efficient instrument for verifying convergence. In this paper, the method is used to show the existence and uniqueness of unpredictable and Poisson-stable oscillations for impulsive inertial neural networks.
This article explores the existence and uniqueness of continuous solutions whose derivatives are discontinuous, and all of them are unpredictable and Poisson-stable functions. The article employs techniques for both ordinary differential and impulsive equations to analyze inertial neural networks. That is, the goal is to prove the main results by utilizing investigation methods of continuous as well as discontinuous functions. The novelty and contributions of the research can be summarized as follows:
- The paper explores unpredictability and Poisson stability, which has been previously studied for continuous neural networks and certain types of discontinuous network systems described by first-order differential equations. The novelty here is that the study delves into the unpredictability and Poisson stability of inertial neural networks, which are second-order differential equations with impulsive actions.
- One of the key contributions of the research is the introduction of impulsive actions, symmetrical in relation to the original neural network. This novel modeling approach is applicable not only to inertial neural networks, but also other network models such as BAM, Cohen–Grossberg-type neural networks, and others.
- The selection of the structure of the impulsive part is based on a consideration of physical characteristics. Specifically, the decision to consider the derivatives as discontinuous functions, while maintaining the continuity of voltage, aligns with the realistic behavior of the system. This choice ensures that the model accurately captures the dynamics of the network under both continuous and impulsive conditions.
- The research employs the method of included intervals to establish the existence and uniqueness of continuous solutions with discontinuous derivatives, which are unpredictable and Poisson stable. This methodology provides new mathematical opportunities for recurrent and chaotic dynamics.
2. Preliminaries
Our objective is mainly to find Poisson-stable and unpredictable oscillations of the impulsive inertial neural network. To achieve this goal, we introduce special time sequences in this section.
Let us give the basic definition of the Poisson-stable sequence.
Definition 1
([22]). A sequence in is called Poisson stable provided that it is bounded and there exists a sequence , , of positive integers which satisfies as on bounded intervals of integers.
Also, we shall need definitions of Poisson stability [22] and unpredictability [24] for continuous functions.
Definition 2
([22]). A uniformly continuous and bounded function is Poisson stable if there exists a sequence , which diverges to infinity such that as uniformly on compact subsets of .
We use the norm , where is the absolute value.
Definition 3
([24]). A uniformly continuous and bounded function is unpredictable if there exist positive numbers and sequences , both of which diverge to infinity, such that as uniformly on compact subsets of and for each and .
2.1. Description of the Poisson Couple
Consider sequences of real numbers . They are assumed to be strictly increasing with regard to the index. Sequence is unbounded in both directions. Moreover, it satisfies with positive numbers , .
We provide the description of a Poisson couple in the following definition.
Definition 4.
A couple of sequences , is called a Poisson couple if there exists a sequence , which diverges to infinity, such that
uniformly on each bounded interval of integers k.
Definition 5
([27]). A sequence , is said to be with -property if there exist a positive real number w and integer p which satisfy for all .
Lemma 1.
Assume that sequences , , satisfy the following conditions
- (i)
- sequence admits the -property;
- (ii)
- , where .
Then, is a Poisson couple.
Proof.
Since the -property is true, for each . Taking for , we obtain that . Now, one can easily check that sequence consists of zeros. Thus, the condition (5) is satisfied on each bounded interval of integers k. □
2.2. Description of Discontinuous Functions with Poisson Stability and Unpredictability Property
A piece-wise continuous function is said to be conditional uniform continuous if for any given positive value , one can find another number such that for two points and within the same continuity interval it is true that provided [28].
Let us consider the set of conditional uniform continuous vector functions , , . The functions are continuous except at a countable set of moments where they exhibit left-continuity. The sets of discontinuity points are unbounded from both sides and do not have finite accumulation points. There is no requirement for the discontinuity moments to be common across functions ın
Two members, and , of are called ϵ-equivalent on a bounded open interval J if discontinuity points of and in J can be numerated with multiplicity one, , and , , such that for each , and for all , except possibly those between neighbors and , . In the case that f, g are -equivalent on J, we say that the functions are in -neighborhoods of each other on J. The topology defined on the basis of -neighborhoods is said to be B-topology [27].
Definition 6.
An element of with discontinuity moments is said to be a discontinuous Poisson-stable function if there exists a sequence of real numbers such that , is a Poisson couple, and as on each bounded interval of real numbers in B-topology.
The sequence in the last definition is called the Poisson or convergence sequence.
As one can see from Definition 6 for discontinuous Poisson stability, we need a convergence sequence , which is common for both the function convergence and discontinuity points , which are connected as a Poisson couple .
Denote by the interval , if and interval , if .
Definition 7.
A discontinuous Poisson-stable function of with discontinuity moments and convergence sequence is said to be discontinuous unpredictable provided that , is a Poisson couple, and there exist positive numbers and sequences of real numbers and of integers, both of which diverge to infinity, such that interval does not contain discontinuity points of and , and on the interval.
The divergence estimated by is said to be the separation property, and is the divergence sequence.
In what follows, we shall say that is a discontinuous unpredictable function with Poisson couple and divergence sequence .
2.3. Reduced System
Next, we need the following transformation formula [10],
2.4. A Space of Discontinuous Functions
Let denote the space of -dimensional vector functions , where is a continuous function and is a piece-wise continuous function from with discontinuity points , , which are impulsive moments of e system (2). Introduce the norm The functions of space satisfy the following properties:
- (A1)
- Functions are Poisson stable with a common convergence sequence ;
- (A2)
- Functions are discontinuous Poisson stable with the common convergence sequence ;
- (A3)
- Convergence sequence and discontinuity moments , make a Poisson couple ;
- (A4)
- There exists a positive number H such that for all functions of the space.
We need the following condition.
- (C1)
- for all .
Consider the following linear homogeneous impulsive systems
joined with system (7), and the transition matrices for (8)
where denotes the number of moments in .
The following conditions for (7) are assumed to be valid:
- (C2)
- Inputs , , are Poisson stable and the sequence of convergence , is common for them;
- (C3)
- Sequences , , are Poisson stable with a common sequence of convergence , ;
- (C4)
- and for all where are positive constants and ;
- (C5)
- and , where , are positive numbers, and ;
- (C6)
- There exists a positive number , such that for all ;
- (C7)
- , ;
- (C8)
- , ;
- (C9)
- , ;
- (C10)
- , .
The following assertion is needed in the proof of the main result of the paper.
Lemma 2.
Suppose that condition (C1) is valid, then for all , the following inequality holds
where .
Similar to the proof in the book [27], one can verify the validity of the following lemma.
Lemma 3.
A function is a bounded solution of (7) if and only if it is a solution of the following integral equation:
We introduce the operator on such that where
Lemma 4.
Proof.
For with fixed , we have that
On account of the above conditions (C1) and (C7)–(C9), this inequality satisfies It follows that the property (A4) is true for .
Let us prove properties (A1)–(A3) for . That is, we have to check that there exists a sequence , such that for each uniformly on each closed and bounded interval of the real axis. We will use the method of intervals considered in [26] and other our papers. Fix a section where with and a positive real number . It is sufficient, to prove the claim, to show that for and large n. We choose numbers and such that
for all .
Take n large enough such that , , whenever and , for all , . Then, for , we obtain that
Further, breaking up the integral into two sub-integrals, we obtain
Lemma 5.
Operator is a contraction.
Proof.
Consider functions . We have that
for all So, it is true that for all
Consequently, by conditions (C7) and (C10) operator is a contraction. The lemma is proved. □
3. Main Results
In this section, the existence of dynamics in a system of neural networks is discussed, specifically focusing on Poisson-stable and unpredictable oscillations of impulsive inertial neural networks. Additionally, the exponential stability of the solutions is obtained under the specific conditions adopted during the research.
By using the -dimensional function , we can rewrite system (7) in vector form,
where and are constant matrices, and and are vector functions such that
and
Let us consider the homogeneous system associated with (25),
Taking into account the commutativity of matrices A and B, we determine the transition matrix of (26) as follows [27]:
Considering the structure of matrix (27) we can easily find that
where .
For simplicity, we shall use the following notation:
The following condition is to be assumed:
- (C11)
- .
Theorem 1.
Suppose the conditions (C1)–(C11) are fulfilled. If input functions , are Poisson stable with the convergence sequence then impulsive system (4) has a unique globally exponentially stable Poisson-stable solution.
Proof.
The coordinate of system (7) is the desired Poisson-stable solution of the main system (4). Therefore, we first prove the existence of such a unique exponentially stable, discontinuous Poisson-stable solution of system (7).
We start with the proof of the completeness of the space . Denote a Cauchy sequence by , , , in , where the limit of as l tends to ∞ is on . Consider a closed and bounded interval . Denote , the discontinuity points and , and , the discontinuity points and in the interval J, respectively. Let n be a large enough number such that . Because of the convergence of , we have that and if l is sufficiently large. Since , for sufficiently large n we have that for , , and . Thus, for sufficiently large n, l, and , it is true that
for all , and . That is, uniformly in B-topology as on J. So, the space is complete.
Under the assumptions of Lemmas 4 and 5, the operator is a contraction and invariant in . Owning to the the contraction mapping theorem, it is concluded that there exists a unique discontinuous Poisson-stable solution of system (7). At the same time, the first coordinate is a unique Poisson-stable solution of the desired impulsive system (4).
We shall next consider the stability of the solution . We have that
for all . If , is another solution of the impulsive inertial neural network system (4), then
By finding the difference
we obtain that
Hence, we find that
Applying the Gronwall–Bellman lemma [27] to the last inequality, we obtain that
According to condition (C11), we conclude that solution , …, of (7) is globally exponential stable. Thus, we have proved that system (7) has a unique globally exponentially stable discontinuous Poisson-stable solution, consequently, the solution is a required unique globally exponential stable Poisson-stable solution of (4). The theorem is proved. □
The following separation property will be needed:
- (C12)
- The functions , in system (7) belong to , and they are unpredictable with positive numbers and divergence sequence , .
Theorem 2.
Under the conditions (C1)–(C12) stated above, the system (4) has a unique globally exponentially stable unpredictable solution.
In accordance with Theorem 1, system (4) has a unique exponentially stable Poisson-stable solution . So, to prove this theorem, we need to show that the solution of (4) satisfies the separation property.
Let us prove that the function has the separation property. Corresponding to Definition 7, the interval does not admit discontinuity points of functions , . That is why studies of unpredictability ignore the presence of discontinuity moments.
Let us check the unpredictability of this solution. We can choose a positive number and such that the following inequalities
and
are satisfied.
Suppose that the numbers , and are fixed.
Denote
and consider the cases:
If holds, we have
for
If is true, it follows from (35) that
for
In accordance with the inequalities obtained in cases and , we see that the solution is discontinuous unpredictable with and .
4. Examples
Next, we will construct examples of unpredictable continuous and discontinuous functions, then use the continuous ones of them as input for a neural network.
In [24], an unpredictable sequence was constructed as a solution to the logistic equation
Moreover, it was proved that for each , there exists an unpredictable solution , of (38). That is, there exist sequences and which diverge to infinity, and a number such that as for each j in bounded intervals of integers and for .
Example 1 (Discontinuous unpredictable function).
Consider the function , , , where is an unpredictable solution of (38), , is a continuous function, and h is a positive number. Suppose that there exist positive numbers such that and for each .
Let us show the unpredictability of the function . For that we need to prove the Poisson stability.
Poisson stability
Fix a number and an interval such that for . For and , we have that and .
Let us denote . For an arbitrary number and sufficiently large number n, it is true that , . We fixed integer number l in . If , then and . This is why for , , we have that
The inequality is valid for , and consequently, , .
Unpredictability
We have that there exists a number and the sequence which diverges to infinity such that for .
From and , it follows that . Hence, We have that
for all , So, is a Poisson-stable and unpredictable function.
Example 2 (Continuous unpredictable function).
Using the function , we construct an integral function , with positive number a. The function is bounded on . The Poisson stability and unpredictability of function are proved by using the method of included intervals, as in [24].
Example 3 (Three-dimensional impulsive inertial neural network).
Finally, let us consider the impulsive inertial neural network
where , , , , , , , , , , , , , , ; the weights for connection between neurons and :
and the external input functions are given by
where is an unpredictable sequence and is an unpredictable function with the value , from Example 2. The set of discontinuity moments of the system is defined by the sequence ,
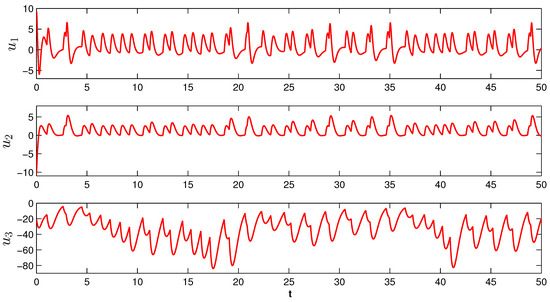
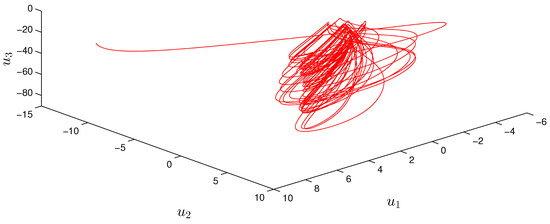
The conditions (C1)–(C12) are true for network (39) with , , , , . It is not difficult to calculate that . Conditions (C1)–(C11) are satisfied for a system with , , and . Hence, there exists a Poisson-stable solution of system (39). The exponential stability of the solution is satisfied for the values , , and . Thus, it follows from Theorem 1 that there exists a unique exponentially stable Poisson-stable solution. Moreover, according to Example 2, the inputs of the system satisfy condition (C12), that is, they are unpredictable. Hence, by Theorem 2, there exists an unpredictable solution of system (39). Unpredictable behavior is highly sensitive to initial conditions, that is, it is impossible to indicate the initial value of the solution. It is known that the asymptotic stability refers to the behavior where solutions of a system approach a particular value or trajectory as time goes to infinity. According to this property, to define the behavior of the unpredictable oscillation, we consider the simulation of another solution , with specific initial conditions , and .
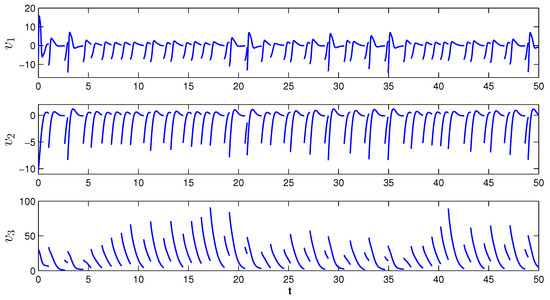
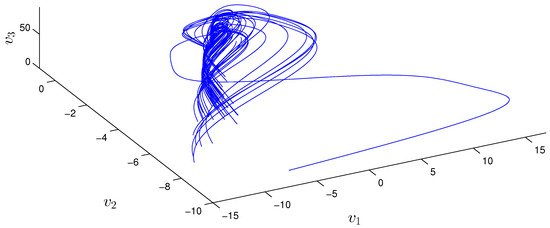
Figure 1 and Figure 2 show the graph and trajectory of a continuous unpredictable solution. The function is a continuous function with discontinuous derivatives of the first order, moreover, it is continuously differentiable on intervals , . That is, we have a non-smoothness at the discontinuity points , . Remember that starting from the first derivative of the solution we obtain a discontinuous function. In Figure 3 and Figure 4, one can see the graph and trajectory of the transformed function , consisting of the derivative of this unpredictable solution. Both cases reveal the unpredictable dynamics of system (39).
Figure 1.
Coordinates of the continuous solution .
Figure 2.
Trajectory of the continuous solution .
Figure 3.
Coordinates of the discontinuous solution .
Figure 4.
The trajectory of the discontinuous solution .
5. Conclusions
The paper contains contributions to the study of unpredictability and Poisson stability in inertial neural network systems. An innovation of this study is the concept of the impulsive action symmetrical in relation to the original network model. This approach is applicable not only for inertial neural networks but also has potential to be adapted for use in other neural networks such as BAM and Cohen–Grossberg-type networks, broadening its applicability. The research employs the method of included intervals to establish the existence and uniqueness of simultaneously continuous and discontinuous oscillations. The study extends the understanding of unpredictability and Poisson stability for discontinuous systems and introduces innovative modeling techniques to impact broad fields of neural network dynamics. Furthermore, we believe that the results presented in this study can be further enhanced by leveraging Lyapunov methods [29], offering opportunities for future improvements. The findings presented here contribute to a deeper comprehension of complex neural network behaviors and offer new avenues for exploration in this field.
Author Contributions
Conceptualization, M.A.; methodology, M.A.; investigation, M.A., Z.N., M.T. and R.S.; software, Z.N.; writing—original draft preparation, Z.N. and R.S.; supervision, M.T. and R.S.; writing—review and editing, M.T. All authors have read and agreed to the published version of the manuscript.
Funding
M.T., R.S. and Z.N. have been supported by the Science Committee of the Ministry of Education and Science of the Republic of Kazakhstan (grant no. AP14870835). M.A. has been supported by 2247-A National Leading Researchers Program of TUBITAK, Turkey, N 120C138.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors wish to express their sincere gratitude to the referees for the helpful criticism and valuable suggestions.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Aouiti, C.; Hui, Q.; Jallouli, H.; Moulay, E. Sliding mode control based fixed-time stabilization and synchronization of inertial neural networks with time-varying delays. Neural Comput. Appl. 2021, 33, 11555–11572. [Google Scholar] [CrossRef]
- Raj, F.I.; Balaji, M.E. Application of Deep Learning and Machine Learning in Pattern Recognition. In Advance Concepts of Image Processing and Pattern Recognition; Kumar, N., Shahnaz, C., Kumar, K., Abed Mohammed, M., Raw, R.S., Eds.; Transactions on Computer Systems and Networks; Springer: Singapore, 2022. [Google Scholar]
- Bai, R.; Huang, R.; Zheng, L.; Chen, Y.; Qin, Y. Structure enhanced deep clustering network via a weighted neighbourhood auto-encoder. Neural Netw. 2022, 155, 144–154. [Google Scholar] [CrossRef] [PubMed]
- Comerta, S.E.; Yazgana, H.R.; Gamze Turka, G. Hopfield neural network based on clustering algorithms for solving green vehicle routing problem. Int. J. Ind. Eng. Comput. 2022, 13, 573–586. [Google Scholar] [CrossRef]
- Lee, D.; Lee, S.T. Artificial intelligence enabled energy-efficient heating, ventilation and air conditioning system: Design, analysis and necessary hardware upgrades. Appl. Therm. Eng. 2023, 235, 121253. [Google Scholar] [CrossRef]
- Jardim, S.; António, J.; Mora, C.; Almeida, A. A novel trademark image retrieval system based on multi-feature extraction and deep networks. J. Imaging 2022, 8, 238. [Google Scholar] [CrossRef]
- Bhattarai, B.; Pandeya, Y.R.; Jie, Y.; Lamichhane, A.K.; Lee, J. High-resolution representation learning and recurrent neural network for singing voice separation. Circuits Syst. Signal Process. 2023, 42, 1083–1104. [Google Scholar] [CrossRef]
- Babcock, K.; Westervelt, R. Stability and dynamics of simple electronic neural networks with added inertia. Physica D 1986, 23, 142–149. [Google Scholar] [CrossRef]
- Cui, N.; Jiang, H.; Hu, C.; Abdurahman, A. Finite-time synchronization of inertial neural networks. J. Assoc. Arab. Univ. Basic Appl. Sci. 2017, 24, 300–309. [Google Scholar] [CrossRef][Green Version]
- Akhmet, M.; Tleubergenova, M.; Zhamanshin, A. Inertial neural networks with unpredictable oscillations. Mathematics 2020, 8, 1797. [Google Scholar] [CrossRef]
- Krishnasamy, R. Impulsive Control Approach to Stabilization of Delayed Inertial Neural Networks. In Proceedings of the First International Conference on Combinatorial and Optimization, ICCAP 2021, Chennai, India, 7–8 December 2021. [Google Scholar]
- Ding, X.; Cao, J.; Alsaadi, F.E. Passivity analysis of coupled inertial neural networks with time-varying delays and impulsive effects. Pramana J. Phys. 2018, 91, 69. [Google Scholar] [CrossRef]
- Qi, J.; Zhang, W. Stability of inertial delayed neural networks with impulsive effect. In Proceedings of the International Workshop on Complex Systems and Networks (IWCSN), Doha, Qatar, 8–10 December 2017; pp. 347–352. [Google Scholar]
- Zhang, W.; Huang, T.; He, X.; Li, C. Global exponential stability of inertial memristor-based neural networks with time-varying delays and impulses. Neural Netw. 2017, 95, 102–109. [Google Scholar] [CrossRef]
- Zhang, X.; Li, C.; Li, H.; Cao, Z. Mean-square stabilization of impulsive neural networks with mixed delays by non-fragile feedback involving random uncertainties. Neural Netw. 2022, 154, 469–480. [Google Scholar] [CrossRef] [PubMed]
- Udhayakumar, K.; Shanmugasundaram, S.; Janani, K.; Kathiresan, S.; Rakkiyappan, R. Fixed-time synchronization of delayed impulsive inertial neural networks with discontinuous activation functions via indefinite LKF method. Appl. Math. Model. 2022, 359, 1361–1384. [Google Scholar] [CrossRef]
- Udhayakumar, K.; Shanmugasundaram, S.; Kashkynbayev, A.; Janani, K.; Rakkiyappan, R. Saturated and asymmetric saturated impulsive control synchronization of coupled delayed inertial neural networks with time-varying delays. Appl. Math. Model. 2023, 113, 528–544. [Google Scholar] [CrossRef]
- Parisi, G.I.; Kemker, R.; Part, J.L.; Kanan, C.; Wermer, S. Continual lifelong learning with neural networks: A review. Neural Netw. 2019, 113, 54–71. [Google Scholar] [CrossRef]
- Lundstrom, B.N.; Higgs, M.H.; Spain, W.J.; Fairhall, A.L. Fractional differentiation by neocortical pyramidal neurons. Nat. Neurosci. 2008, 11, 1335–1342. [Google Scholar] [CrossRef]
- Aihara, K.; Takabe, T.; Toyoda, M. Chaotic neural networks. Phys. Lett. A 1990, 144, 333–340. [Google Scholar] [CrossRef]
- Xiaoxue, L.; Xiaofan, Z.; Xin, Y.; Dan, L.; He, W.; Bowen, Z.; Bohan, Z.; Di, Z.; Liqun, W. Review of medical data analysis based on spiking neural networks. Procedia Comput. Sci. 2023, 221, 1527–1538. [Google Scholar] [CrossRef]
- Sell, G.R. Topological Dynamics and Ordinary Differential Equations; Van Nostrand Reinhold Company: London, UK, 1971. [Google Scholar]
- Poincaré, H. Les Methodes Nouvelles de la Mecanique Celeste; Gauthier-Villars: Paris, France, 1899. [Google Scholar]
- Akhmet, M. Domain Structured Dynamics Unpredictability, Chaos, Randomness, Fractals, Differential Equations and Neural Networks; IOP Publishing: Bristol, UK, 2021. [Google Scholar]
- Akhmet, M.U.; Fen, M.O. Unpredictable points and chaos. Commun. Nonlinear Sci. Numer. Simul. 2016, 40, 1–5. [Google Scholar] [CrossRef]
- Akhmet, M.; Tleubergenova, M.; Zhamanshin, A. Dynamics of shunting inhibitory cellular neural networks with variable two-component passive decay rates and Poisson stable inputs. Symmetry 2022, 14, 1162. [Google Scholar] [CrossRef]
- Akhmet, M. Principles of Discontinuous Dynamical Systems; Springer: New York, NY, USA, 2010. [Google Scholar]
- Akhmet, M. Almost Periodicity, Chaos, and Asymptotic Equivalence; Springer: New York, NY, USA, 2020. [Google Scholar]
- Dashkovskiy, S.; Kosmykov, M.; Mironchenko, A.; Naujok, L. Stability of interconnected impulsive systems with and without time delays, using Lyapunov methods. Nonlinear Anal. Hybrid Syst. 2012, 6, 899–915. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).