
Mixed Sensitivity-Based Robust H∞ Control Method for Real-Time Hybrid Simulation


Abstract
1. Introduction
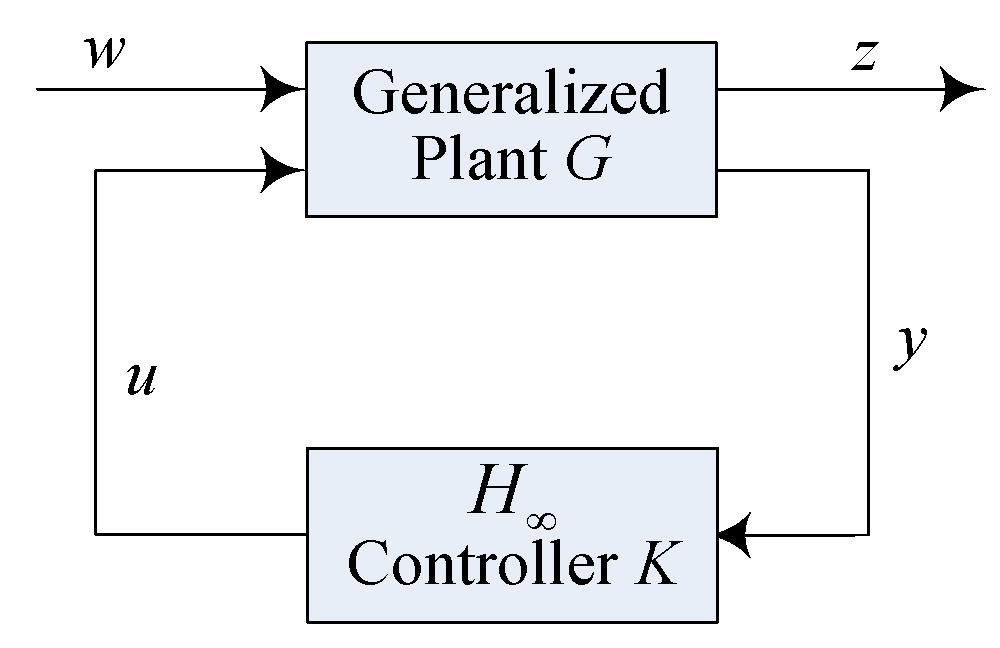
2. Overview of H∞ Control Theory
- (A, B2) is stabilizable and (C2, A) is detectable;
- D12 = [0; I]T and D21 = [0 I];
- has full column rank for all ω;
- has full row rank for all ω.
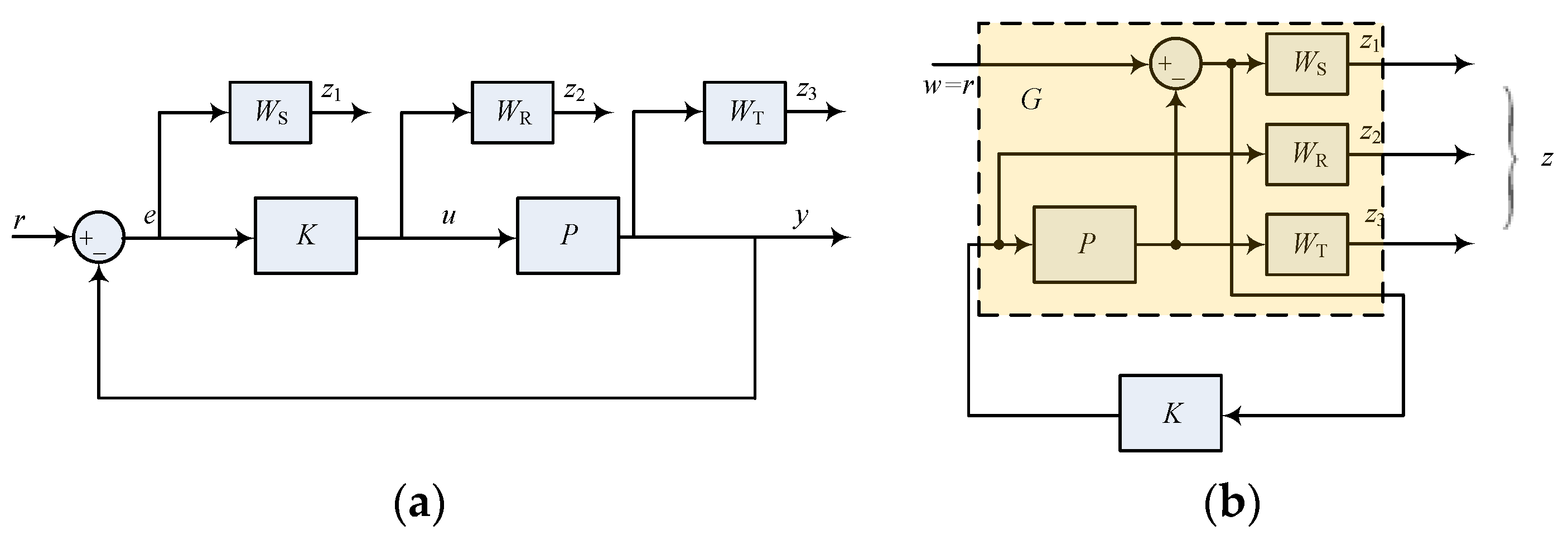
3. Weighting Function and Its Influence
3.1. Selection of Performance Weighting Function
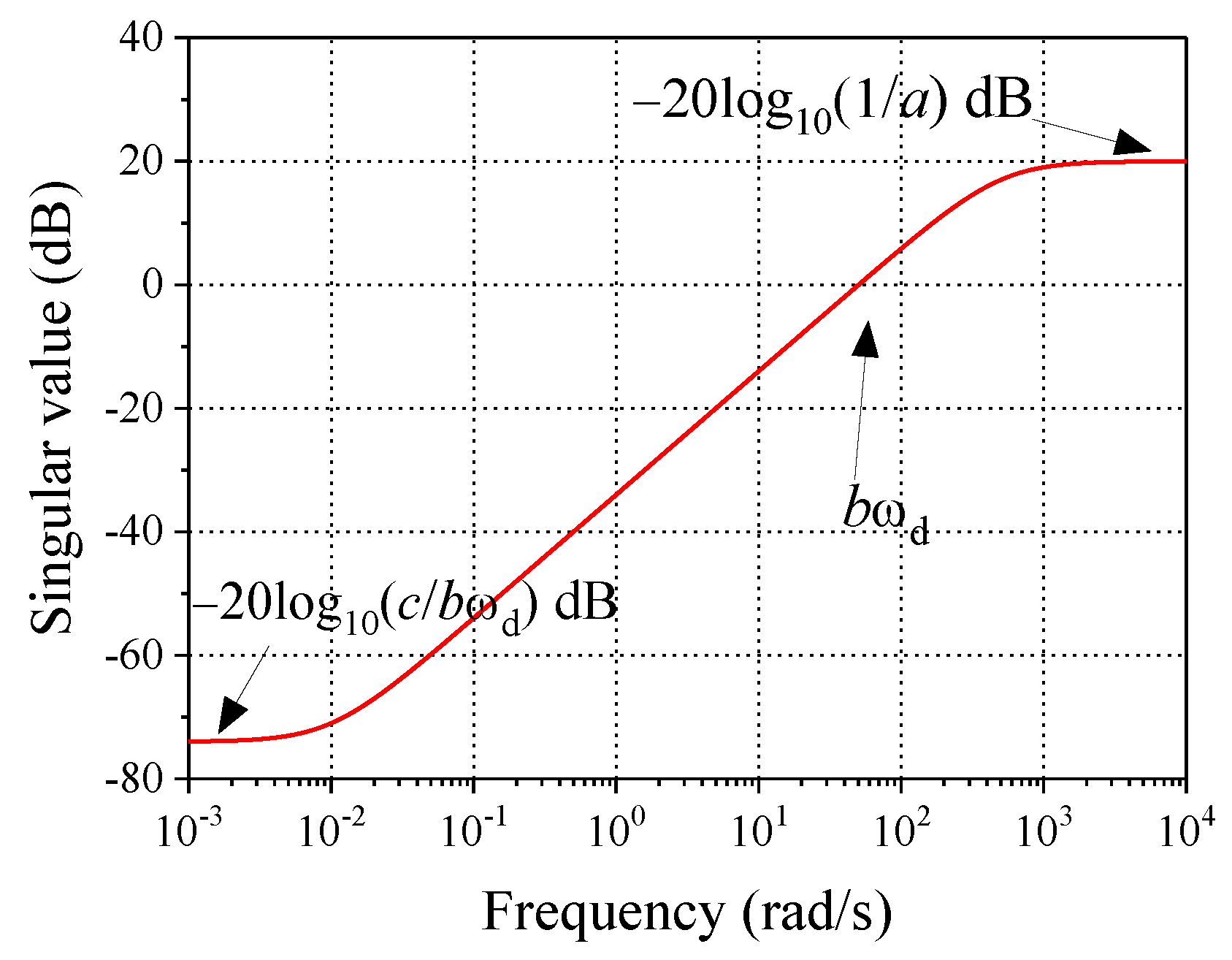
3.1.1. Weighting WS
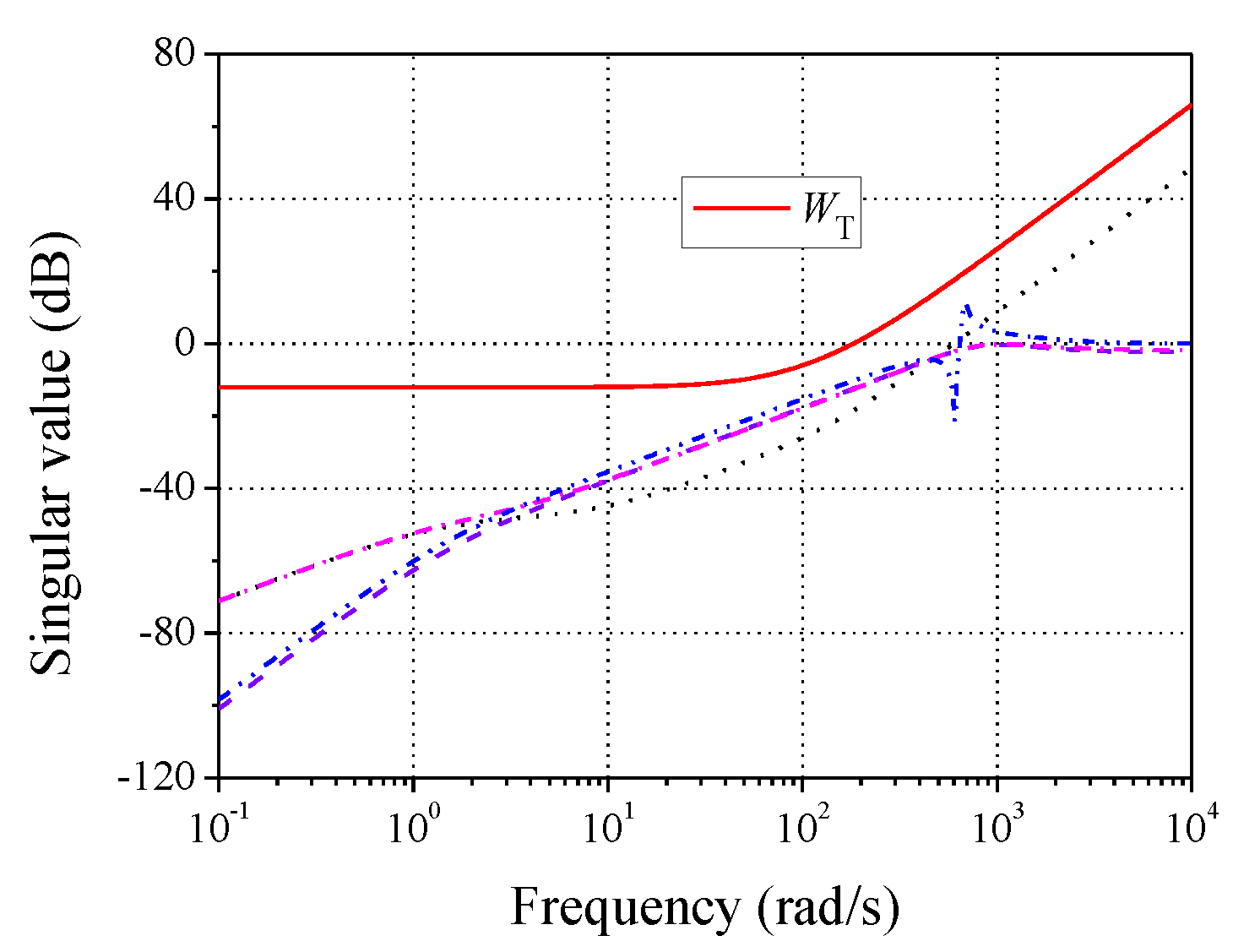
3.1.2. Weighting WT
3.1.3. Weighting WR
3.2. Influence on the System Dynamics
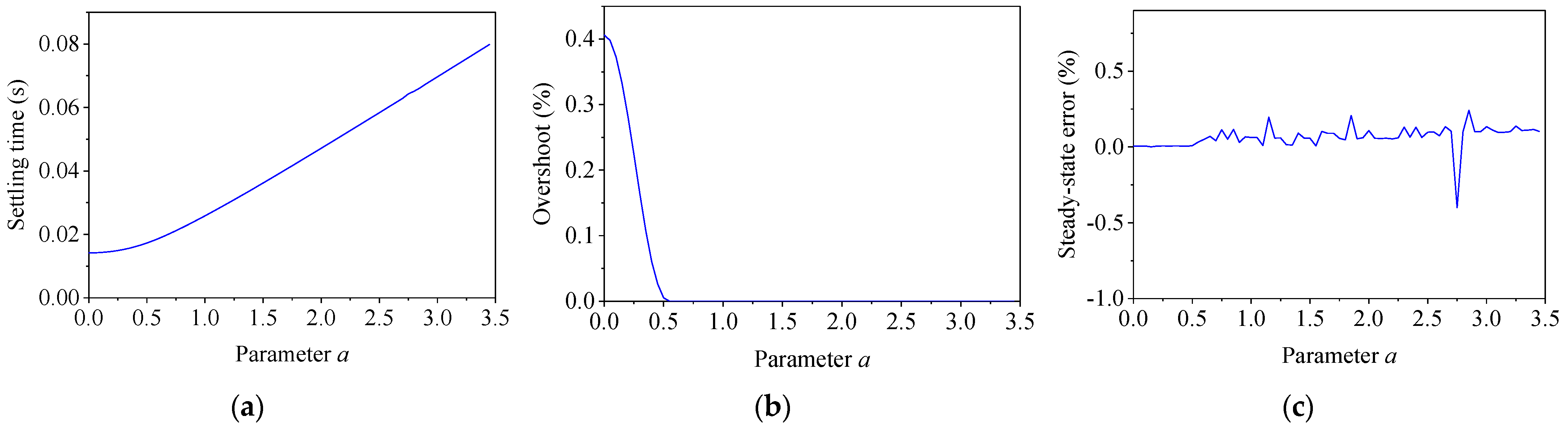
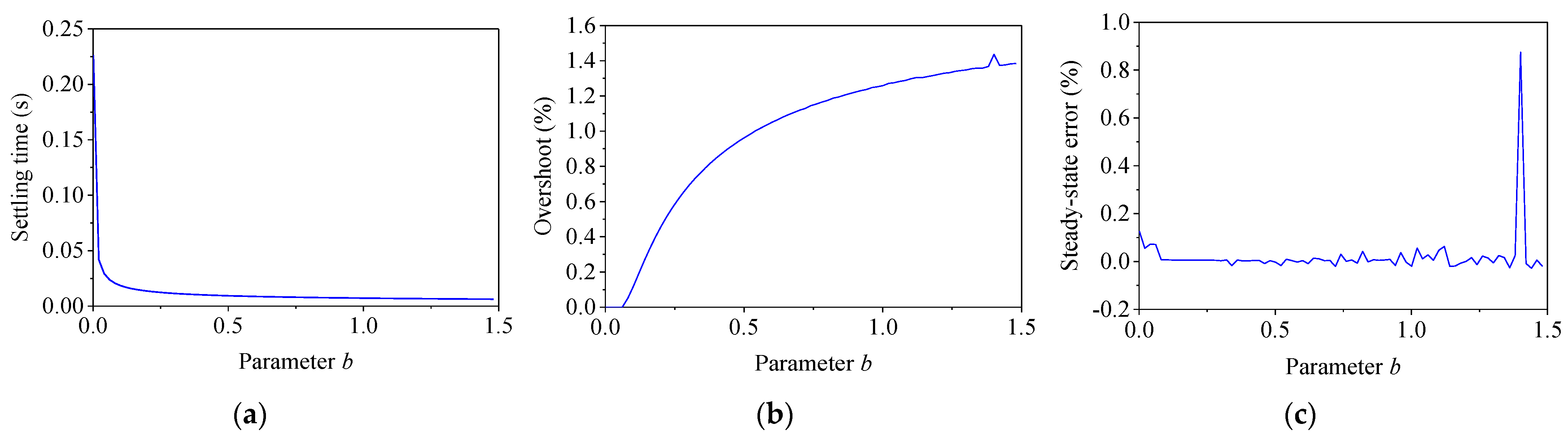
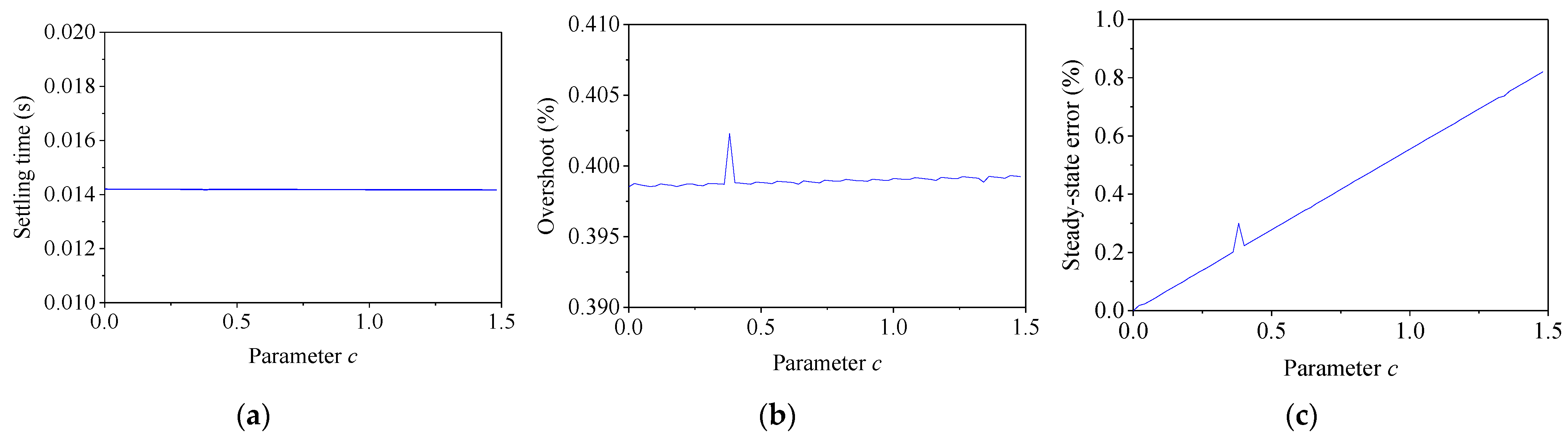
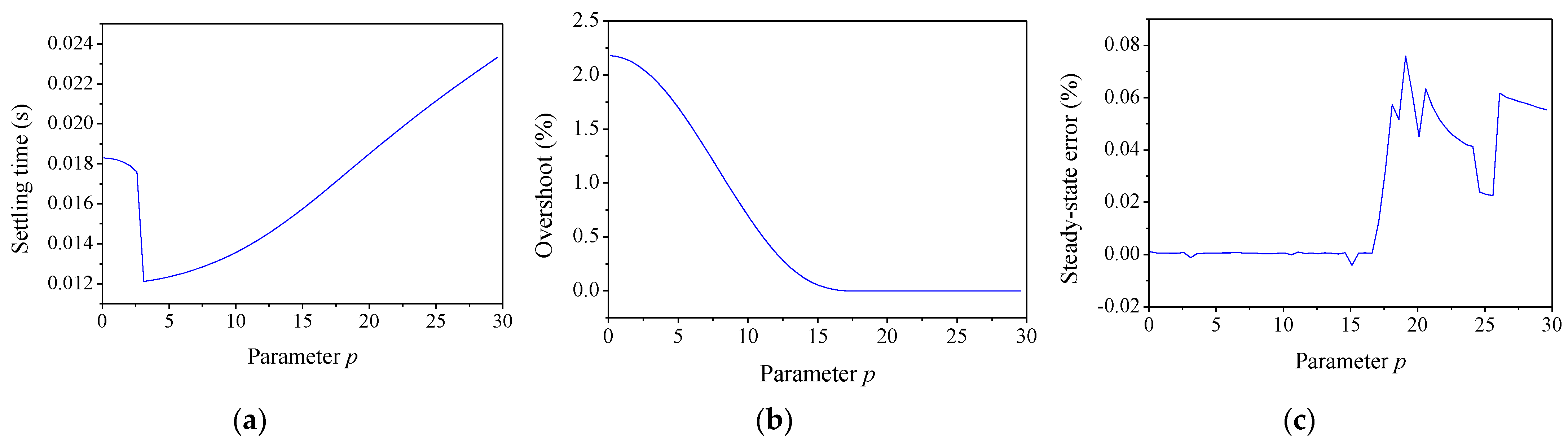
3.2.1. Influence of WS
- Parameter a in WS
- 2.
- Parameter b in WS
- 3.
- Parameter c in WS
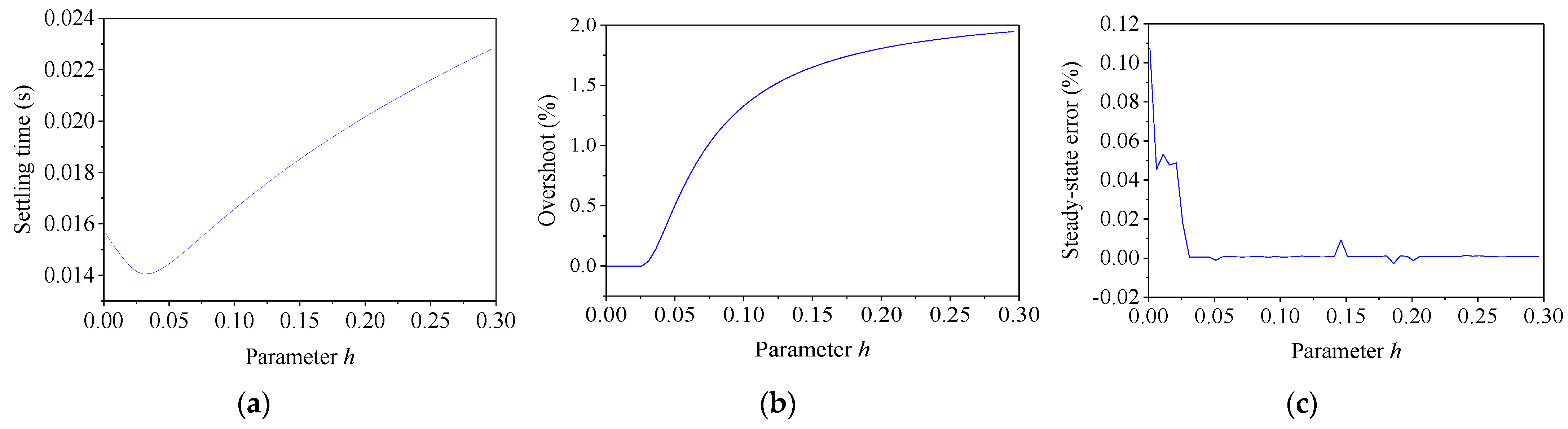
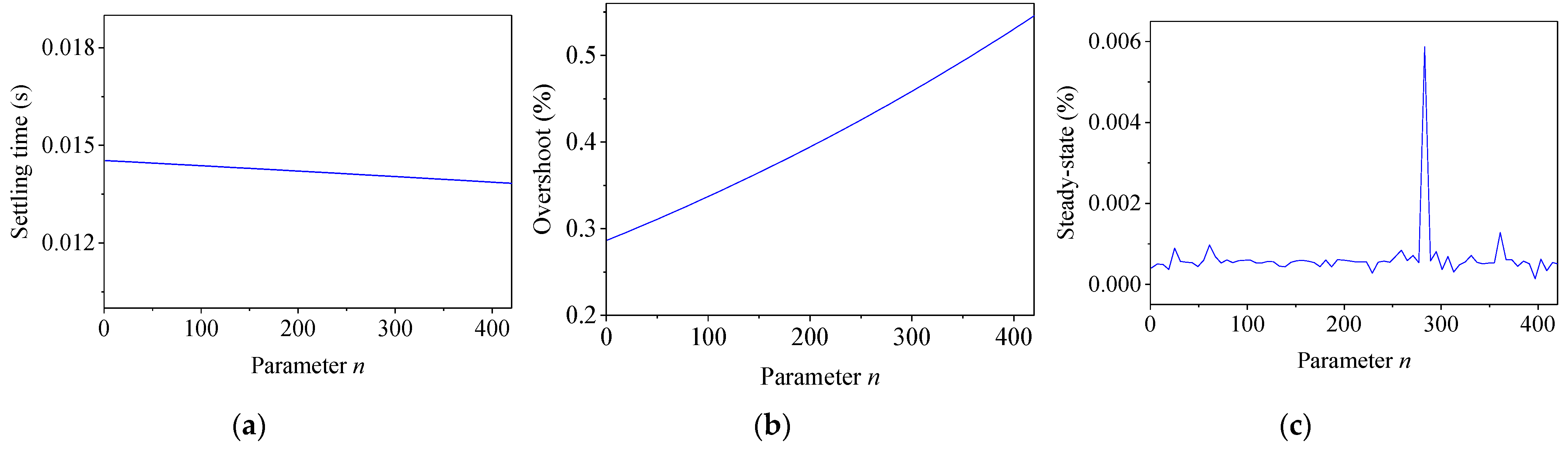
3.2.2. Influence of WT
- Parameter h in WT
- 2.
- Parameter m in WT
- 3.
- Parameter n in WT
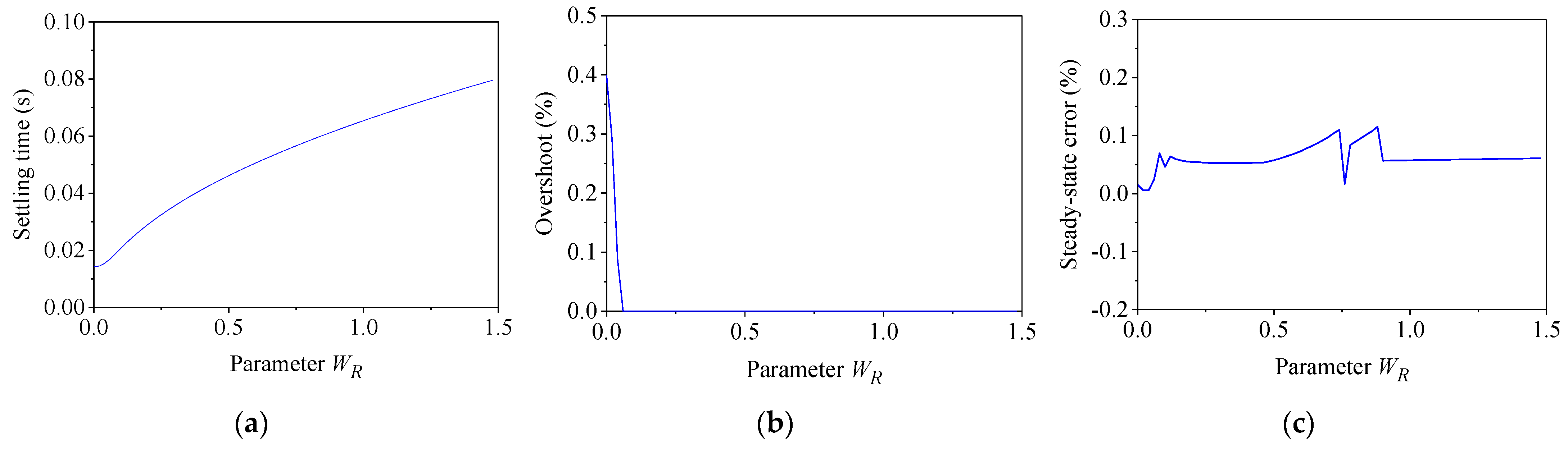
3.2.3. Influence of WR
4. Numerical Validation
4.1. Robustness Investigation
4.1.1. Modeling Uncertainties
- Controller design
- Modeling errors
4.1.2. Variation of the Specimen
- Stiffness
- Damping
4.2. Virtual RTHS
5. Experimental Validation
5.1. Overview of the Test
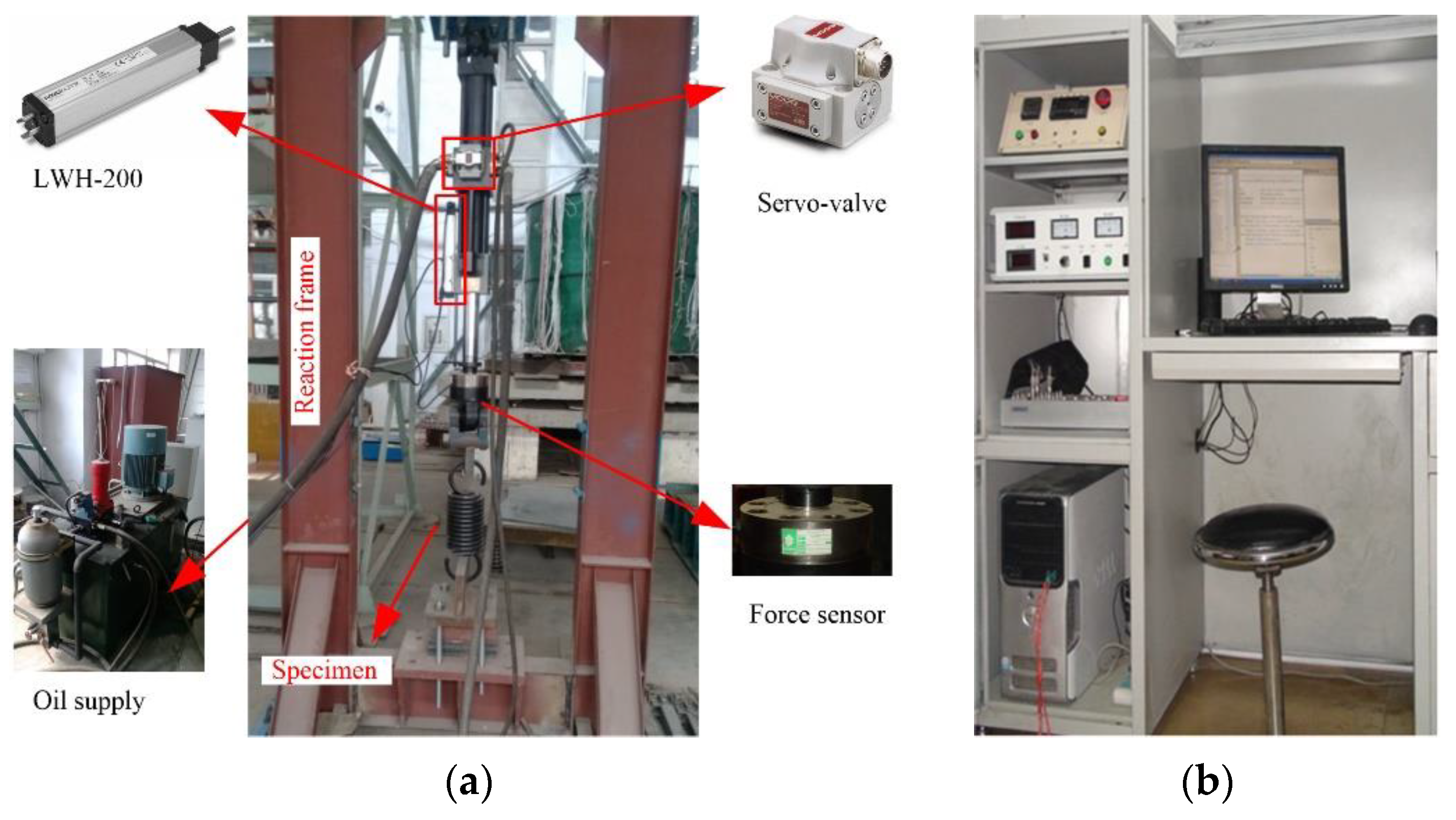
5.1.1. Experimental Setup
5.1.2. Controller Design
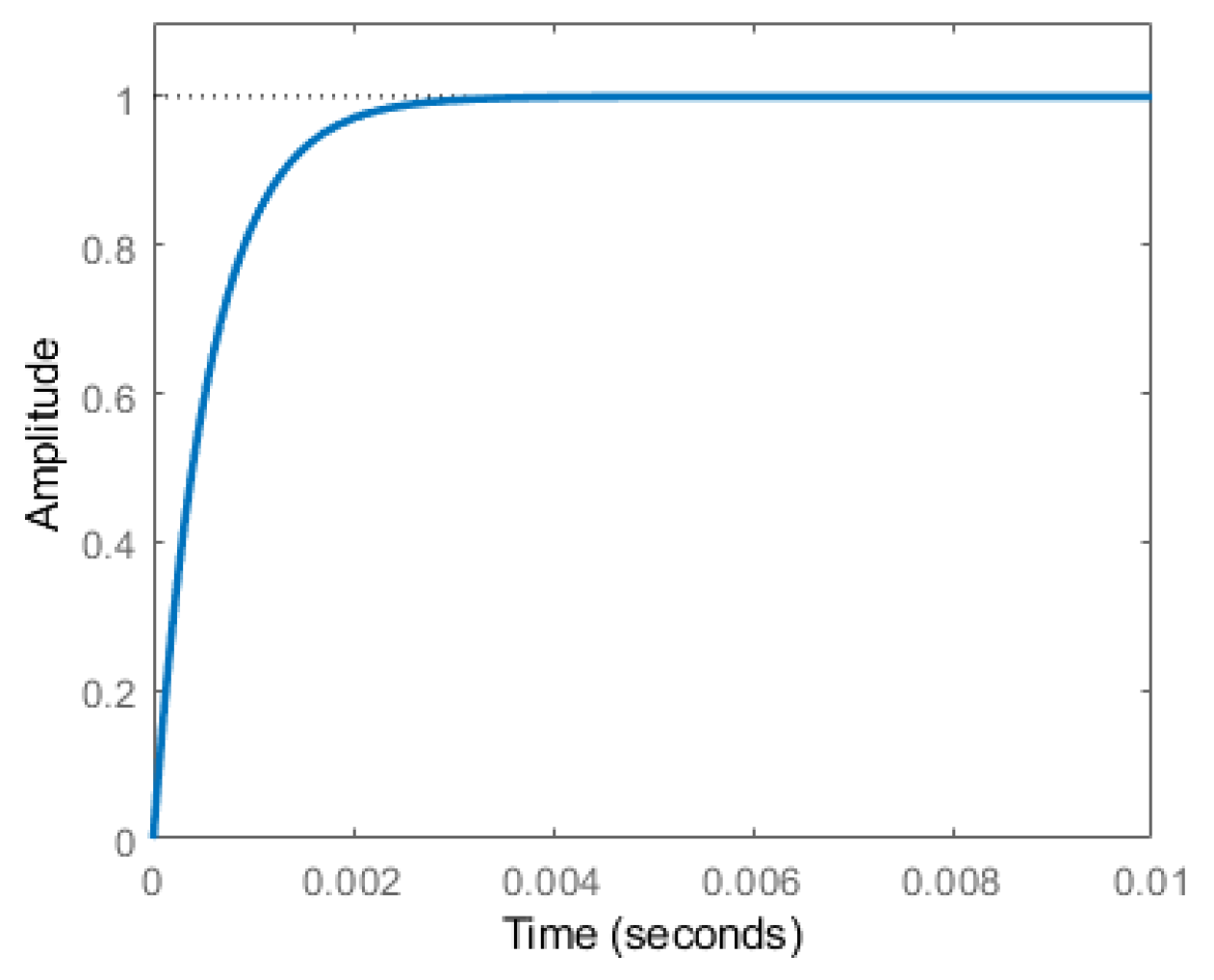
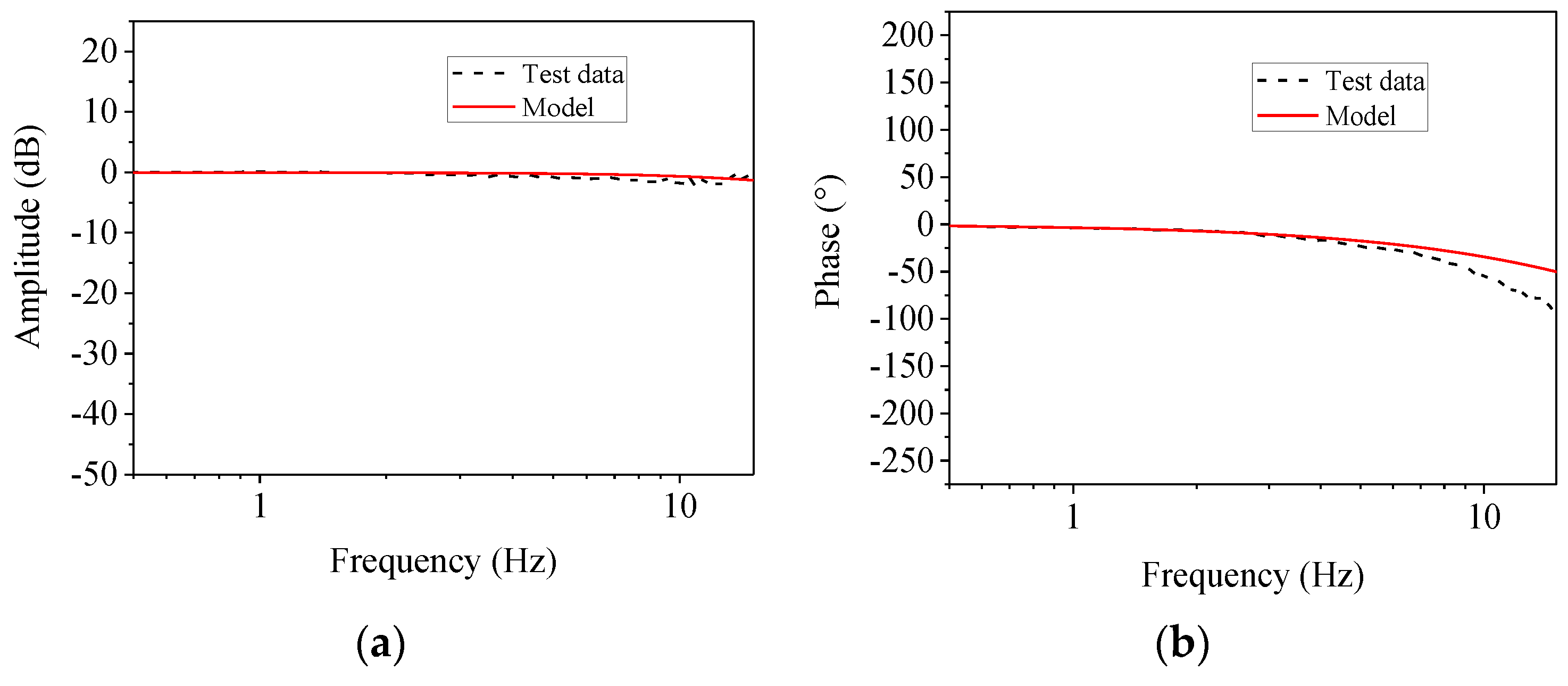
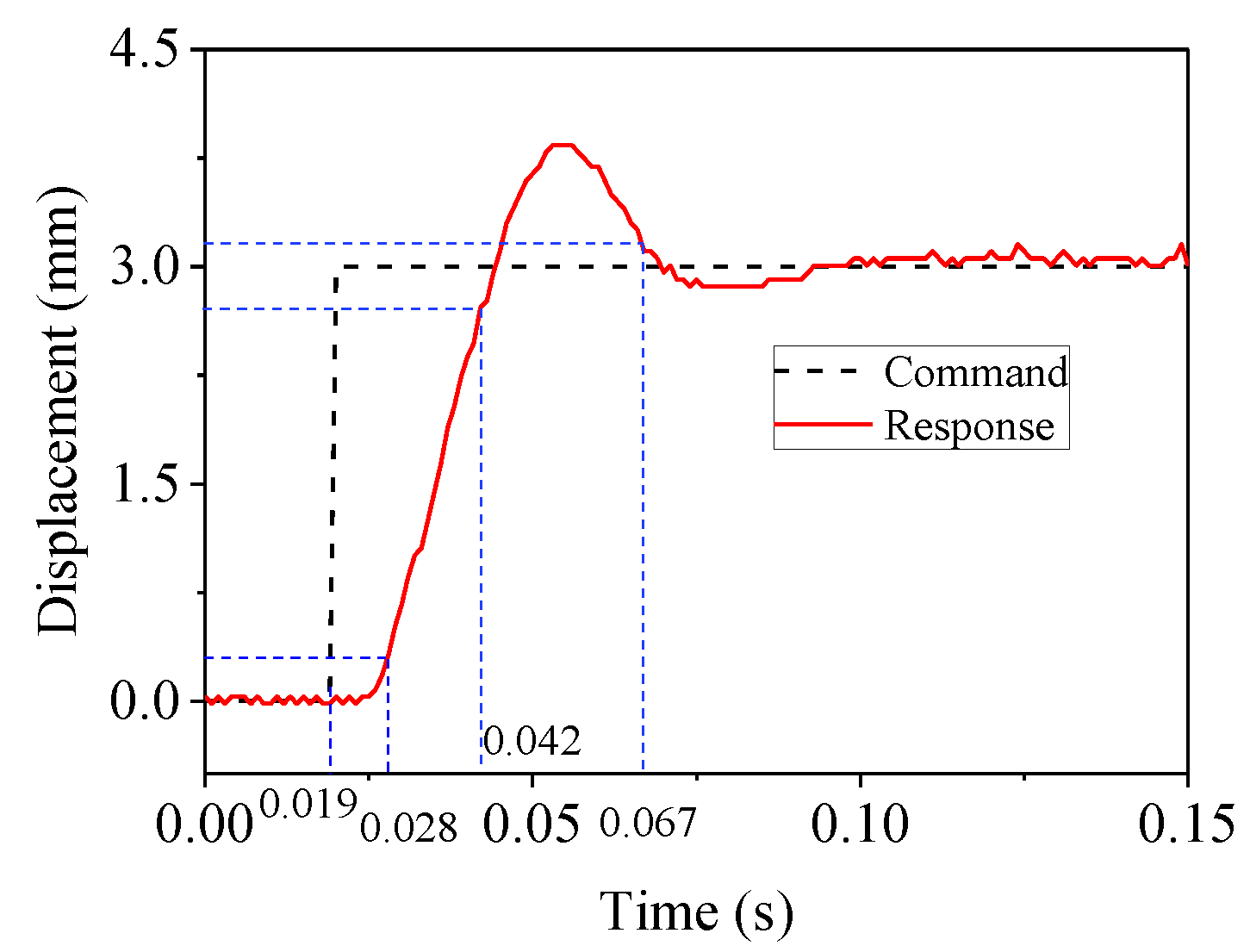
5.2. Loading System Verification
5.3. RTHS
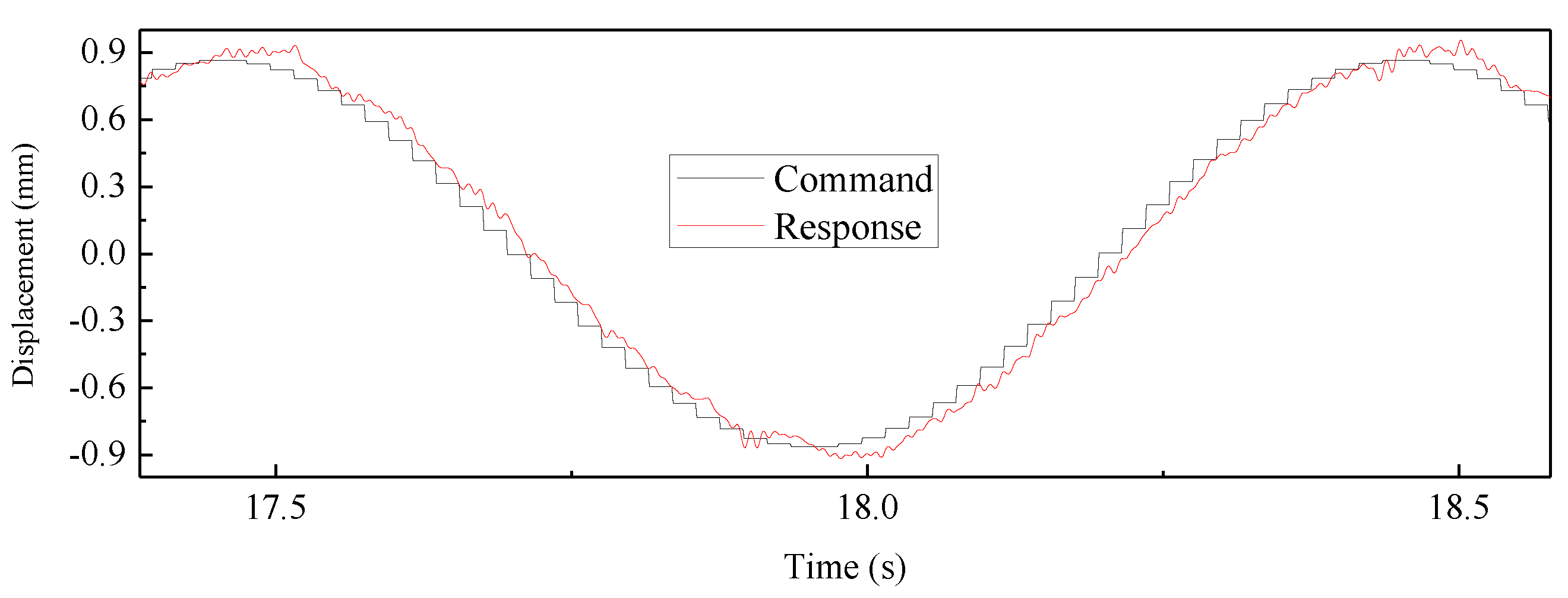
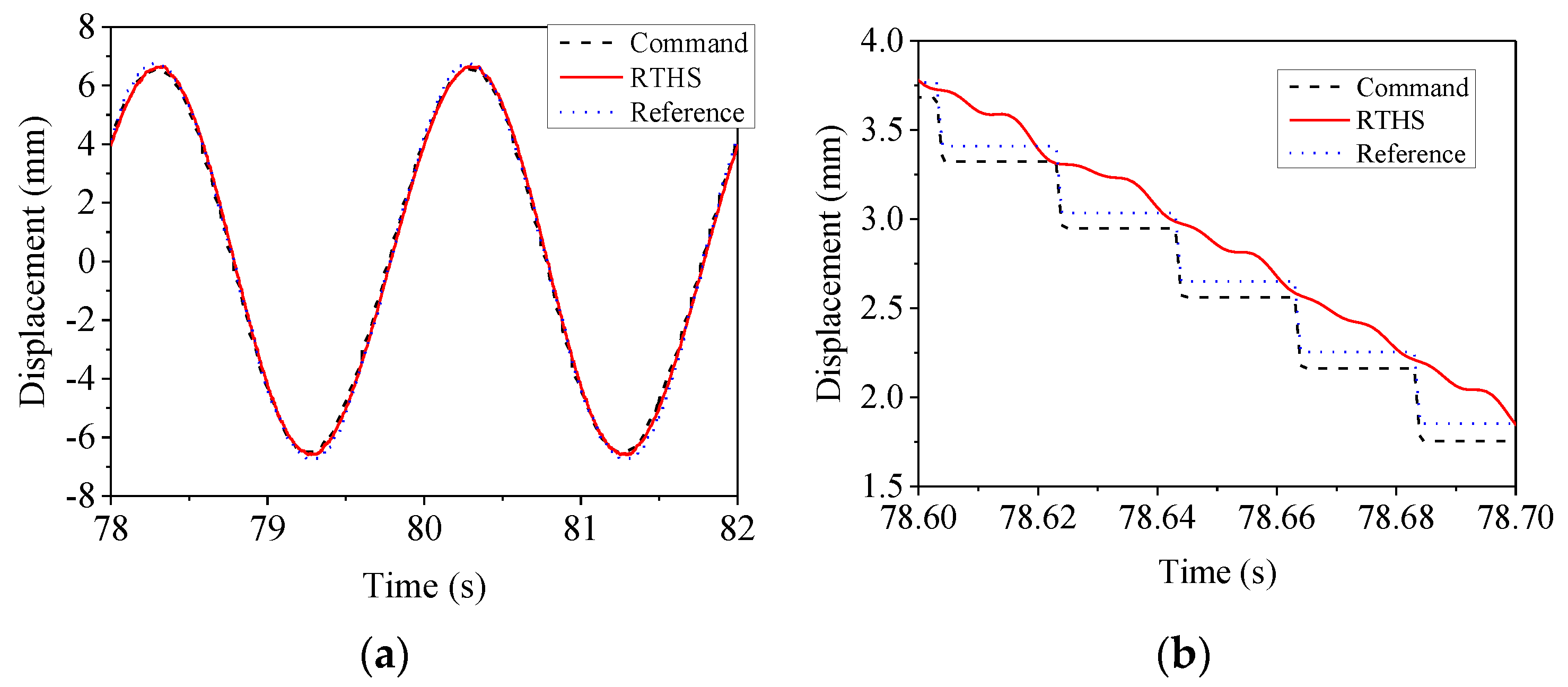
5.3.1. Sinusoidal Excitation
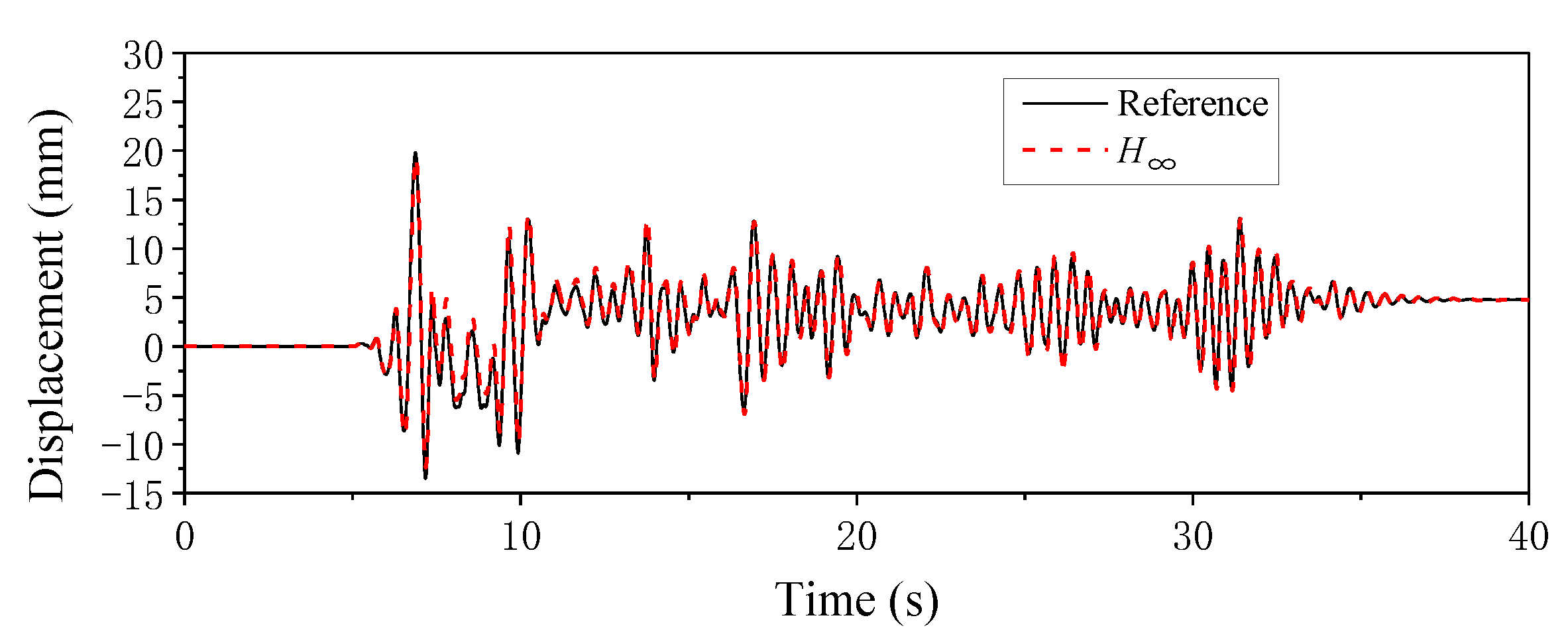
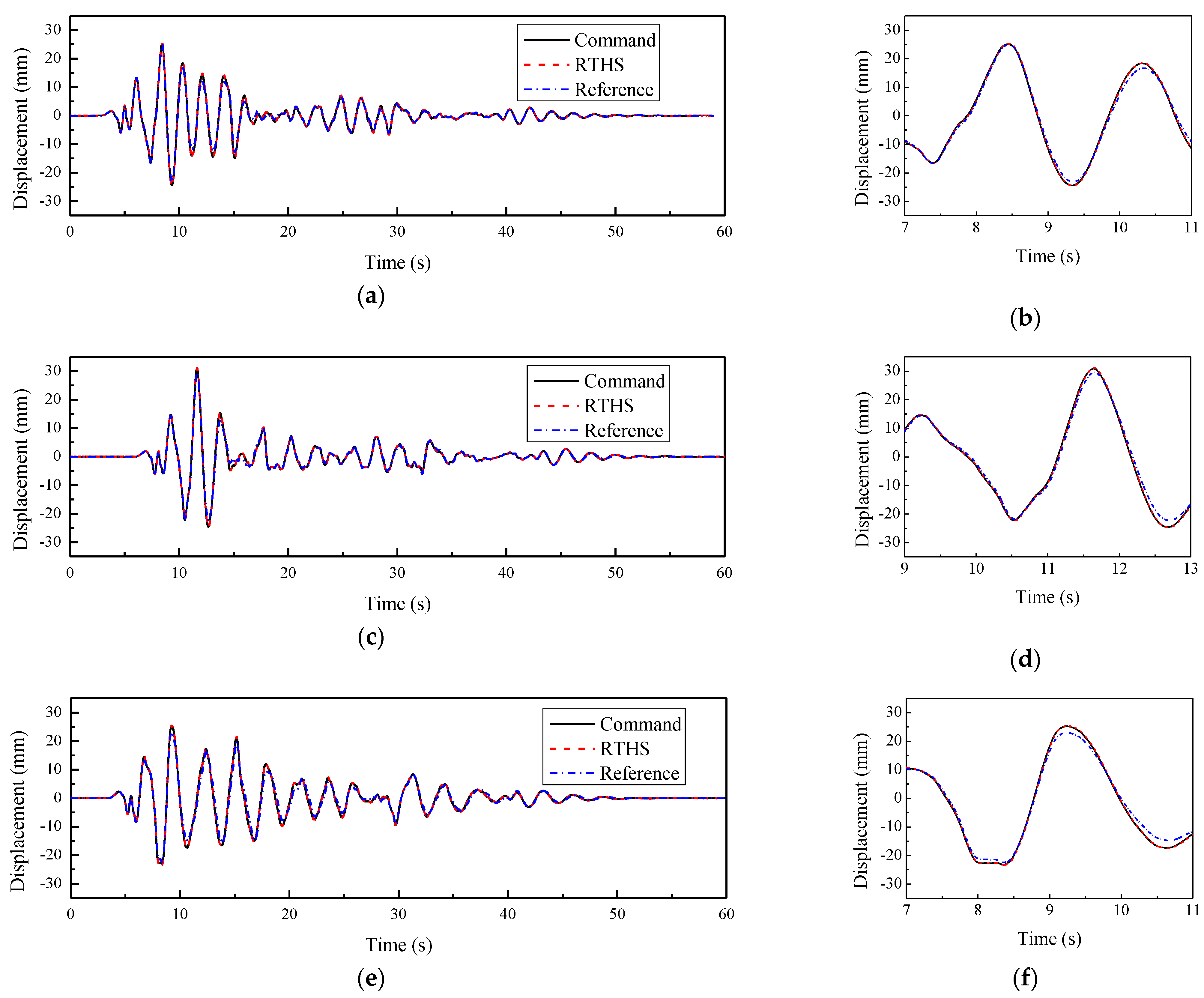
5.3.2. Earthquake
6. Conclusions
- The principle of the H∞ control theory was presented briefly. Theoretically, the H∞ control strategy is an optimization problem. By introducing the performance weighting function to the feedback control system, the standard H∞ control problem can be formulated.
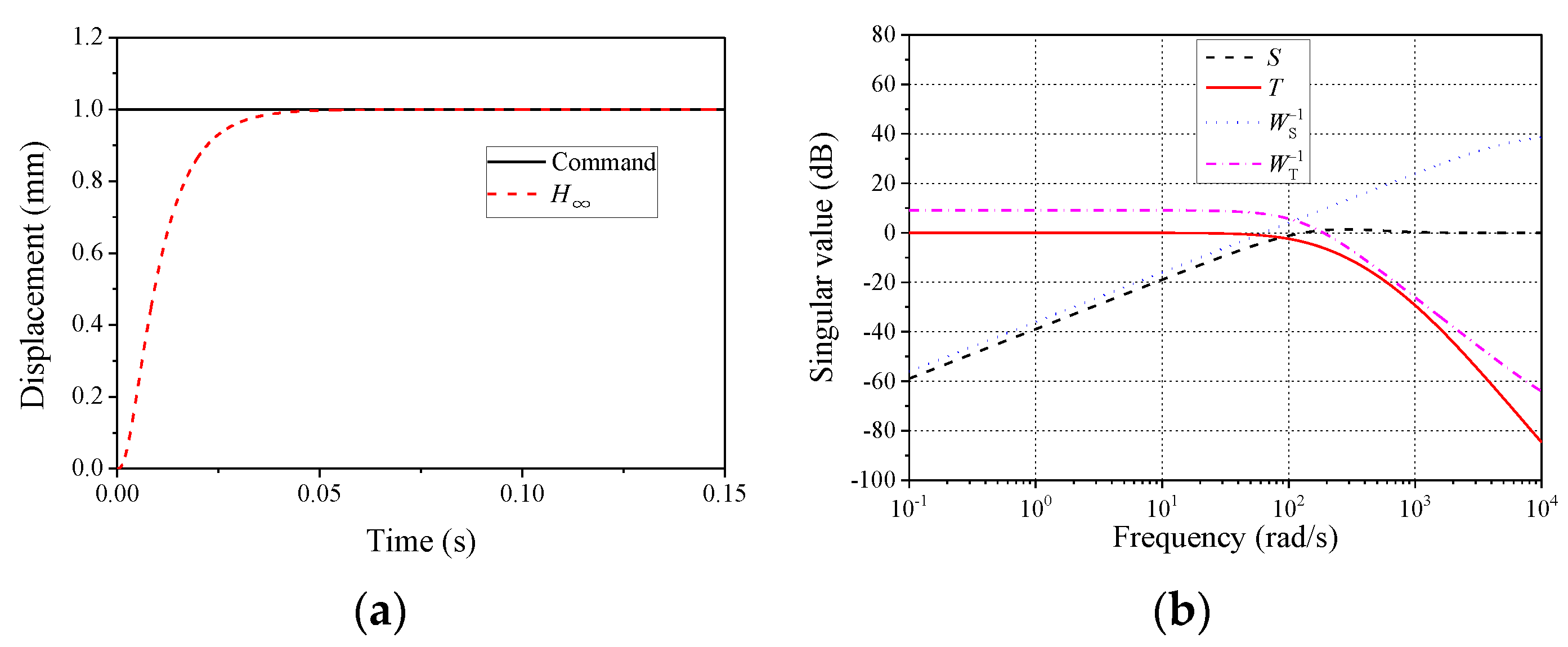
- The weighting function selection method was proposed, and the influences of the weighting function on the system dynamics were discussed. Typically, WS should be close to an integrator to eliminate the steady-state error, and a large numerator will generate a fast response speed. WT should be determined by evaluating the model uncertainties in advance, and it should have a slope of approximately 40 dB/dec over the high-frequency range to suppress the unmodeled dynamics and measurement noise. A small positive constant value is usually used for WR.
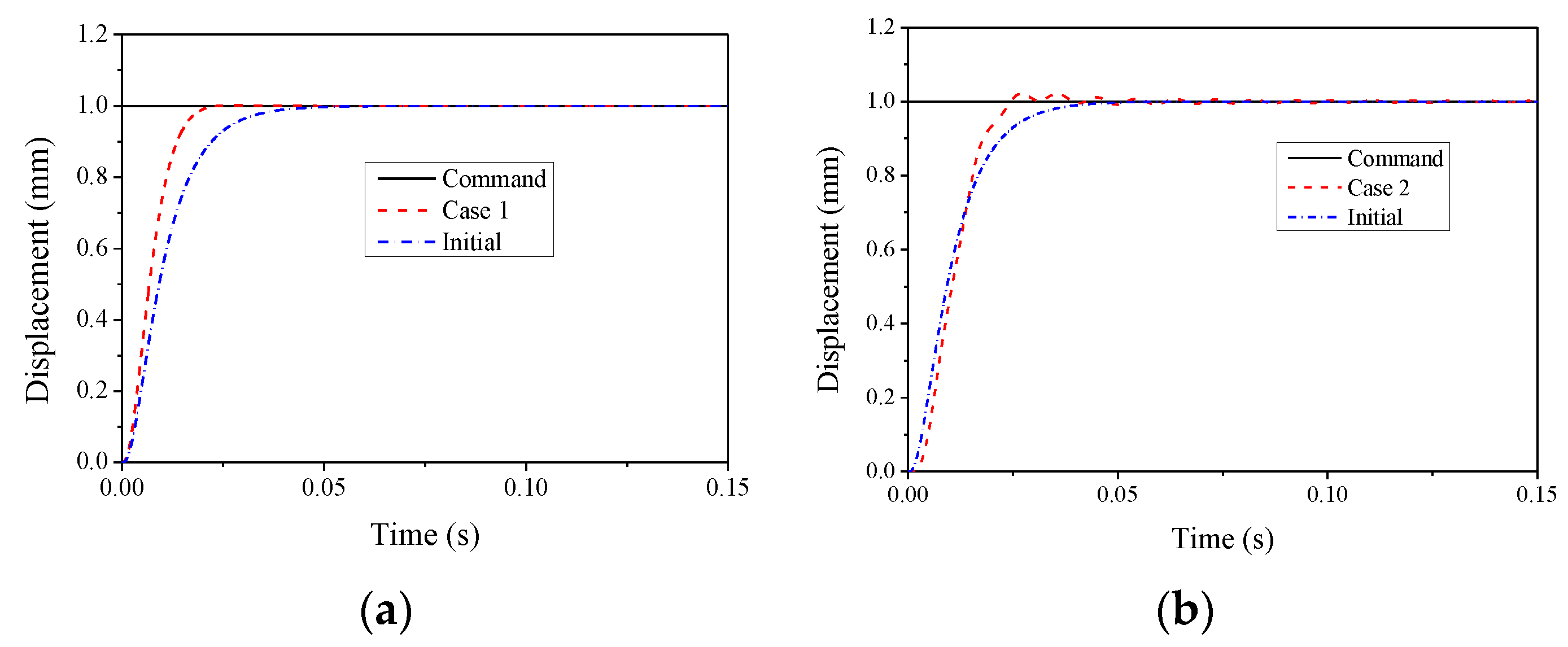
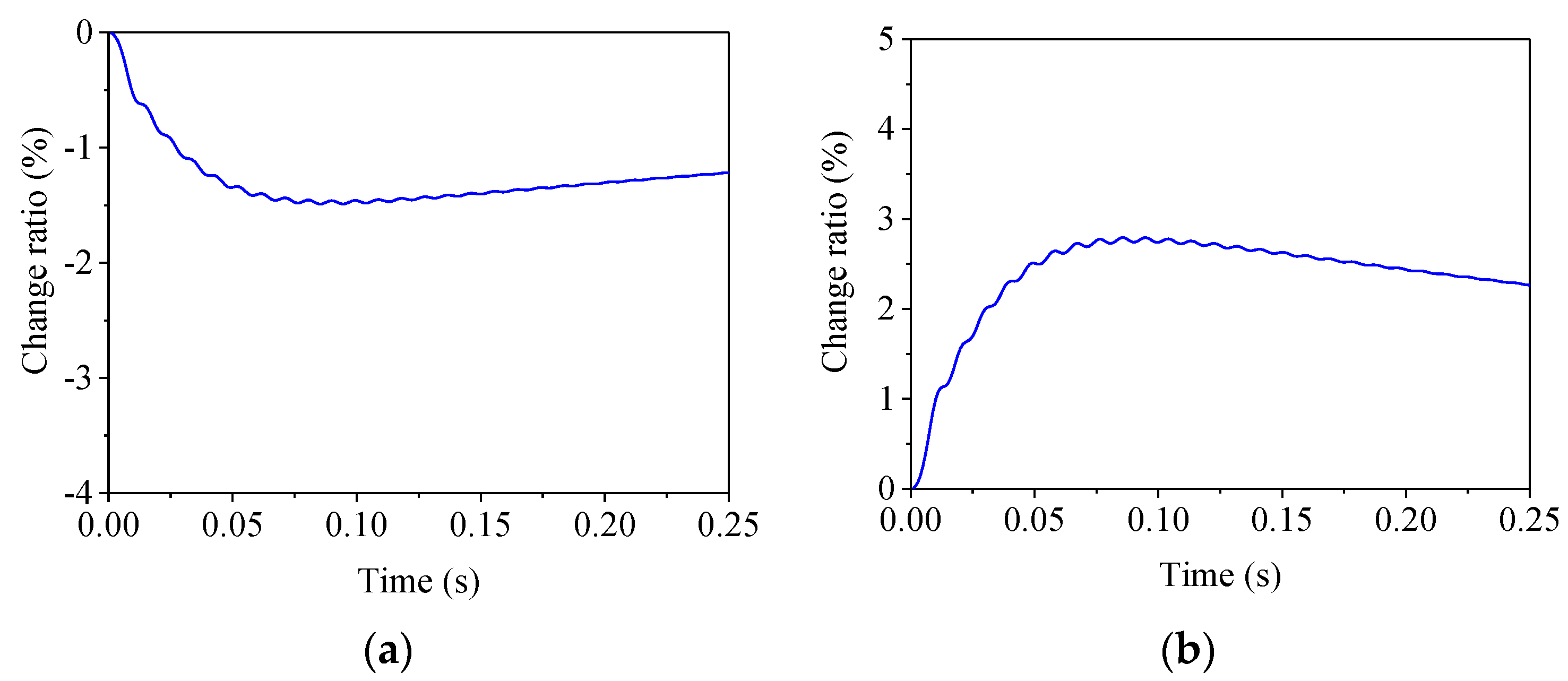
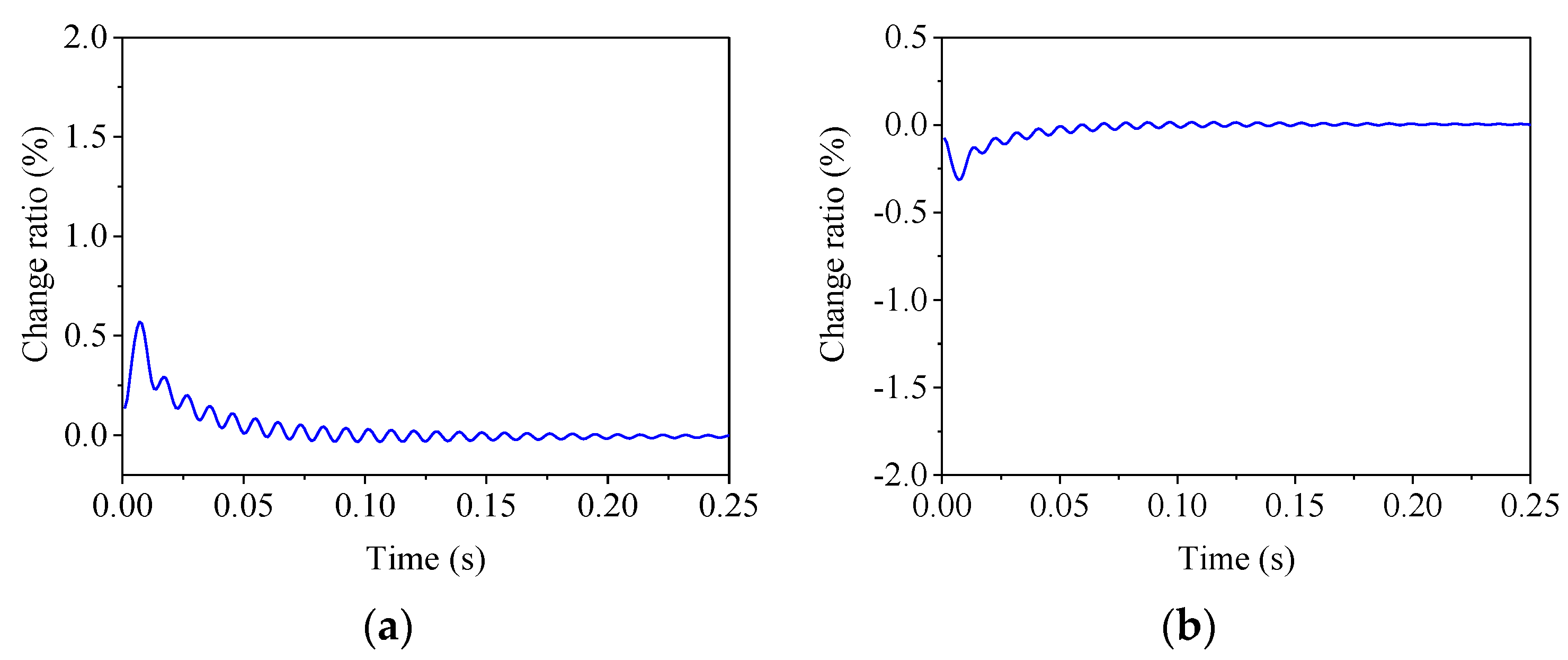
- The robustness of the H∞ controller was investigated numerically. When considering the model uncertainties and characteristic variation in the specimen, the overshoot and steady-state error varied in an acceptable range, indicating the strong robustness of the H∞ controller.
- The effectiveness and feasibility of the proposed method were validated via numerical simulations and actual RTSHs. When considering the nonlinear characteristics of the specimen, the actual modeling uncertainties, or the measurement noise, the H∞-controlled system showed an excellent tracking performance, indicating that it is suitable to use the H∞ controller for RTHS.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| a, b, and c | Adjustable parameters in weighting function WS |
| e | Tracking error |
| h, m, and n | Adjustable parameters in weighting function WT |
| j | Imaginary unit |
| k | Pressure difference feedback gain |
| k0 | Servo-valve gain |
| p | Supply pressure |
| r | Reference input |
| u | Control signal or controller output |
| w | Exogenous input |
| x | State vector |
| y | Measured output |
| z | Performance output |
| A, B, C, D | Coefficient matrix |
| Ap | Piston area |
| G | Generalized plant |
| G0 | Nominal or analytical plant |
| K | Controller |
| KE | Stiffness of specimen |
| ME | Mass of specimen |
| P | Transfer function of the control plant |
| R | Controller sensitivity |
| S | Sensitivity function |
| T | Complementary sensitivity function |
| Twz | Transfer function from input w to output z |
| V | Volume |
| WS, WR, and WT | Weighting function |
| β | Effective bulk modulus of oil |
| γ | Positive number |
| ω | Frequency |
| ωd | Desired bandwidth |
| σ | Singular value |
References
- Nakashima, M.; Kato, H.; Takaoka, E. Development of real-time pseudo dynamic testing. Earthq. Eng. Struct. Dyn. 1992, 21, 79–92. [Google Scholar] [CrossRef]
- Hakuno, M.; Shidawara, M.; Hara, T. Dynamic destructive test of a cantilever beam, controlled by an analog-computer. Pro. Jpn. Soc. Civ. Eng. 1969, 171, 1–9. [Google Scholar] [CrossRef]
- Nakashima, M.; Takai, H. Computer-actuator online testing using substructure and mixed integration techniques. In Proceedings of the 7th Symposium on the Use of Computers in Building Structures, Architectural Institute of Japan, Tokyo, Japan, 10–11 December 1985; pp. 205–210. [Google Scholar]
- Dermitzakis, S.N.; Mahin, S.A. Development of Substructuring Techniques for on-Line Computer Controlled Seismic Performance Testing; University of California: Berkeley, CA, USA, 1985. [Google Scholar]
- Wu, B.; Bao, H.; Ou, J.; Tian, S. Stability and accuracy analysis of the central difference method for real-time substructure testing. Earthq. Eng. Struct. Dyn. 2005, 34, 705–718. [Google Scholar] [CrossRef]
- Wu, B.; Xu, G.; Wang, Q.; Williams, M.S. Operator-splitting method for real-time substructure testing. Earthq. Eng. Struct. Dyn. 2006, 35, 293–314. [Google Scholar] [CrossRef]
- Chen, C.; Ricles, J.M. Analysis of implicit HHT-α integration algorithm for real-time hybrid simulation. Earthq. Eng. Struct. Dyn. 2012, 41, 1021–1041. [Google Scholar] [CrossRef]
- Huang, L.; Chen, C.; Guo, T.; Chen, M. Stability Analysis of Real-Time Hybrid Simulation for Time-Varying Actuator Delay Using the Lyapunov-Krasovskii Functional Approach. J. Eng. Mech. 2019, 145, 04018124. [Google Scholar] [CrossRef]
- Horiuchi, T.; Inoue, M.; Konno, T.; Namita, Y. Real-time hybrid experimental system with actuator delay compensation and its application to a piping system with energy absorber. Earthq. Eng. Struct. Dyn. 1999, 28, 1121–1141. [Google Scholar] [CrossRef]
- Darby, A.; Williams, M.; Blakeborough, A. Stability and delay compensation for real-time substructure testing. J. Eng. Mech. 2002, 128, 1276–1284. [Google Scholar] [CrossRef]
- Ahmadizadeh, M.; Mosqueda, G.; Reinhorn, A. Compensation of actuator delay and dynamics for real-time hybrid structural simulation. Earthq. Eng. Struct. Dyn. 2008, 37, 21–42. [Google Scholar] [CrossRef]
- Wu, B.; Wang, Z.; Bursi, O.S. Actuator dynamics compensation based on upper bound delay for real-time hybrid simulation. Earthq. Eng. Struct. Dyn. 2013, 42, 1749–1765. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, B.; Bursi, O.S.; Xu, G.; Ding, Y. An effective online delay estimation method based on a simplified physical system model for real-time hybrid simulation. Smart Struct. Syst. 2014, 14, 1247–1267. [Google Scholar] [CrossRef]
- Chen, C.; Ricles, J.M. Improving the inverse compensation method for real-time hybrid simulation through a dual compensation scheme. Earthq. Eng. Struct. Dyn. 2009, 38, 1237–1255. [Google Scholar] [CrossRef]
- Carrion, J.E.; Spencer Jr, B.F. Model-Based Strategies for Real-Time Hybrid Testing; Newmark Structural Engineering Laboratory, University of Illinois at Urbana-Champaign: Urbana, IL, USA, 2007. [Google Scholar]
- Ning, X.; Wang, Z.; Wu, B. Kalman Filter-Based Adaptive Delay Compensation for Benchmark Problem in Real-Time Hybrid Simulation. Appl. Sci. 2020, 10, 7101. [Google Scholar] [CrossRef]
- Xu, W.; Chen, C.; Guo, T.; Chen, M. Evaluation of frequency evaluation index based compensation for benchmark study in real-time hybrid simulation. Mech. Syst. Signal Process. 2019, 130, 649–663. [Google Scholar] [CrossRef]
- Wang, Z.; Ning, X.; Xu, G.; Zhou, H.; Wu, B. High performance compensation using an adaptive strategy for real-time hybrid simulation. Mech. Syst. Signal Process. 2019, 133, 106262. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, D.; Shao, X.; Ning, X.; Wang, T. A robust linear-quadratic-gaussian controller for the real-time hybrid simulation on a benchmark problem. Mech. Syst. Signal Process. 2019, 133, 106260. [Google Scholar] [CrossRef]
- Ning, X.; Wang, Z.; Wang, C.; Wu, B. Adaptive Feedforward and Feedback Compensation Method for Real-time Hybrid Simulation Based on a Discrete Physical Testing System Model. J. Earthquake Eng. 2020. [Google Scholar] [CrossRef]
- Ning, X.; Wang, Z.; Zhou, H.; Wu, B.; Ding, Y.; Xu, B. Robust actuator dynamics compensation method for real-time hybrid simulation. Mech. Syst. Signal Process. 2019, 131, 49–70. [Google Scholar] [CrossRef]
- Gao, X.; Castaneda, N.; Dyke, S.J. Real time hybrid simulation: From dynamic system, motion control to experimental error. Earthq. Eng. Struct. Dyn. 2013, 42, 815–832. [Google Scholar] [CrossRef]
- Ou, G.; Ozdagli, A.I.; Dyke, S.J.; Wu, B. Robust integrated actuator control: Experimental verification and real-time hybrid-simulation implementation. Earthq. Eng. Struct. Dyn. 2015, 44, 441–460. [Google Scholar] [CrossRef]
- Zhou, K.; Doyle, J.C.; Glover, K. Robust and Optimal Control; Prentice Hall: New Jersey, NJ, USA, 1996. [Google Scholar]
- Jung, R.Y.; Benson Shing, P.; Stauffer, E.; Thoen, B. Performance of a real-time pseudodynamic test system considering nonlinear structural response. Earthq. Eng. Struct. Dyn. 2007, 36, 1785–1809. [Google Scholar] [CrossRef]
- Jung, R.Y. Development of Real-Time Hybrid Test System; University of Colorado at Boulder: Boulder, CO, USA, 2005. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter | Value | Parameter | Value |
|---|---|---|---|---|
| Servovalve | Natural frequency | 816.81 rad/s | Damping ratio | 0.7 |
| Servo-valve gain k0 | 1.0674 m2/s | Supply pressure p | 19.995 | |
| Actuator | Piston area Ap | 0.0248 m2 | Volume V | 0.0069 m3 |
| Effective bulk modulus of oil β | 677.8 MPa | Pressure difference feedback gain k | 0.0002 | |
| Specimen | Mass ME | 56.289 kg | Damping ratio | 0.05 |
| Stiffness KE | 2276.3 kN/m |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Servo-valve gain k0 | 0.0512 m2/s | Supply pressure p | 19.995 |
| Piston area Ap | 0.0015 m2 | Volume V | 0.0043 m3 |
| Effective bulk modulus of oil β | 677.8 MPa | Pressure difference feedback gain k | 0.0002 |
| Case | Stiffness of NS | RMSE (%) | |
|---|---|---|---|
| Tracking | RTHS | ||
| 1 | 35 kN/m | 2.77 | 12.47 |
| 2 | 17.5 kN/m | 3.04 | 13.07 |
| 3 | 0 kN/m | 2.31 | 17.96 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ning, X. Mixed Sensitivity-Based Robust H∞ Control Method for Real-Time Hybrid Simulation. Symmetry 2021, 13, 840. https://doi.org/10.3390/sym13050840
Ning X. Mixed Sensitivity-Based Robust H∞ Control Method for Real-Time Hybrid Simulation. Symmetry. 2021; 13(5):840. https://doi.org/10.3390/sym13050840
Chicago/Turabian StyleNing, Xizhan. 2021. "Mixed Sensitivity-Based Robust H∞ Control Method for Real-Time Hybrid Simulation" Symmetry 13, no. 5: 840. https://doi.org/10.3390/sym13050840
APA StyleNing, X. (2021). Mixed Sensitivity-Based Robust H∞ Control Method for Real-Time Hybrid Simulation. Symmetry, 13(5), 840. https://doi.org/10.3390/sym13050840