Abstract
In this paper, for a class of uncertain stochastic nonlinear systems with input time-varying delays, an adaptive neural dynamic surface control (DSC) method is proposed. To approximate the unknown continuous functions online, the neural network approximation technique was applied, and based on the DSC scheme, the desired controller was constructed. A compensation system is presented to compensate for the effect of the input delay. The Lyapunov–Krasovskii functionals (LKFs) were employed to compensate for the effect of the state delay. Compared with the existing works, based on using the DSC scheme with the nonlinear filter and stochastic Barbalat’s lemma, the asymptotic regulation performance of this closed-loop system can be guaranteed under the developed controller. To certify the availability for the designed control method, some simulation results are presented.
1. Introduction
In recent decades, due to the wide existence of random disturbances in real engineering applications, a large amount of achievements, with respect to the adaptive control problem for stochastic systems, have been reported [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15]. The adaptive control problems of stochastic nonlinear systems are addressed in [1,2,3,4] by using the output–feedback control method. For uncertain high-order stochastic nonlinear systems, the adaptive control problems are studied in [5,6,7], and the system stability can be ensured under the desired state feedback controller. For the uncertain stochastic switched systems in [10,11], the adaptive control schemes are established based on the fuzzy approximation method. The adaptive neural tracking problem for the uncertain stochastic nonlinear systems is presented in [12,13] where the unknown hysteresis is presented. For a class of stochastic interconnected non-strict feedback systems with dead zones, an adaptive neural DSC method is proposed in [15], and the “explosion of complexity” is avoided.
In addition, time delays frequently occur in real control systems, and will degrade the system performance. Therefore, many adaptive control achievements for the systems with time delays are presented in [16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33]. In terms of where the time delays occur, the adaptive tracking control problem for uncertain input-delayed systems and state-delayed systems are considered in [17,18,19,20,21,22,23,24], respectively. The adaptive control problems for an uncertain discrete-time system and continuous-time system are separately addressed in [25,26,27,28,29,30]. For systems with time varying delays, some interesting results are shown in [30,31,32,33]. Moreover, by designing a compensation system and employing the Lyapunov–Krasovskii functionals (LKFs) to compensate for the effect of the input delay and state delay, respectively, some useful control methods are presented in [18,27]. This provides us with effective schemes to solve the adaptive control problem for the systems with time delays.
Based on the above research results, for the stochastic systems with time delays, some significant achievements are reported in [34,35,36,37,38,39,40,41,42,43,44]. For nonlinear stochastic full state constraint systems with unknown constant time delays, an adaptive NN controller is proposed based on the use of LKFs and the DSC method, under controlling the constructed controller, the bounded stability of this closed-loop signal is guaranteed in [34]. For nonlinear stochastic systems with time-varying delays, the adaptive output–feedback control problems are presented in [35,36,37]. Based on the LKF method, the global asymptotic stabilization problem for stochastic systems with state time-delays is solved in [41,44].
We should note that the traditional adaptive backstepping method is employed for stochastic time-delayed systems in [35,36,37,38,39,40,41,42,43,44], and the repeated differentiations of the virtual controller is essential in the process of designing the desired controller. Therefore, increasing the system order, the controller designing process will be more complicated, i.e., the “explosion of complexity” problem will happen. Moreover, the literature [34,35,36,37,38,39,40,41,42,43,44] just focuses on the systems with state time-invariant delays and time-vary delays and, therefore, for a class of uncertain stochastic nonlinear system with state and input time varying delays, an adaptive neural DSC scheme will be established in this paper, The main contributions of this paper are as follows:
(i) This paper addresses the adaptive neural DSC problem for a class of uncertain stochastic nonlinear systems with state and input time-varying delays, firstly. Compared to the existing works [34,35,36,37,38,39,40,41,42,43,44], the asymptotic stability of the system output signal is achieved under the proposed control scheme.
(ii) To achieve the control objective, a DSC scheme with the nonlinear filter is presented to develop the adaptive neural controller for the uncertain stochastic nonlinear systems. In addition, the LKFs and a compensation system are employed to compensate for the effect of the time-varying delays.
(iii) The semi-global boundedness in probability of all the closed-loop system signals are guaranteed, in particular, the system output signal is asymptotically stable in probability based on the use of the stochastic Barbalat lemma.
2. Problem Statement and Preliminary

Table 1.
Abbreviations.
Table 2.
Symbols description.
This paper considers the following stochastic nonlinear system
where means the system state, denotes the control input with known non-negative time-varying delay , is the system output, is the unknown function with , is the Borel measurable non-negative time varying delay, denotes the system state with time-varying delay, and are unknown locally Lipschitz functions with , means the dimensional independent standard Wiener process.
Control objective: The developed adaptive NN controller guarantees that all closed-loop system signals remain semi-globally bounded in probability, and the system output signal is asymptotically stable in probability.
The following assumption on the system (1) is necessary to achieve the control objective. For simplicity, and are written as and .
Assumption 1.
(see [19]). For the state time delay, it satisfies and the time derivative of satisfies , where Δ and γ are positive constants. In addition, the input time delay is bounded.
In the following section, some preliminaries are presented to construct the controller and analyze the closed-loop control system stability.
Lemma 1 (Young’s Inequality).
(see [45]). For , one has
where are positive constants, and .
Lemma 2.
(see [46]). For and any positive constant ξ, the following inequality can be obtained
Lemma 3.
(see [47]). Let , , the following inequalities hold
In addition, some RBF NNs are used to solve the problem of unknown continuous function in the process of controller designing, that is
where denotes the weight vector, denotes the input vector, means the NN node number, with a unknown parameter , and denotes the NN inherent bounded approximation error. means the known smooth vector function, and the Gaussian function is designed as
where means the center, the Gaussian function’s width is . The optimal weight satisfies
where is the estimate of .
In the following section, the stochastic nonlinear system is presented as
where , , and are continuous and locally Lipschitz functions.
Definition 1.
(see [48]). Consider a given positive function , and the differential operator is defined as
with the matrix trace .
This paper uses the gain suppressing inequality method. For , is a non-negative function, is a smooth function, and is bounded. Then the following function is defined as [49]
Lemma 4.
(see [49]). For , if the following inequality is satisfied
where is a parameter, denotes an unknown bounded constant, and means a constant variable. Then for , we can obtain that the signals involved in (11) are bounded in probability; that is, the boundedness of and in probability can be achieved.
3. Adaptive NN Control Scheme Design and Stability Analysis
The adaptive neural DSC scheme and the process of proving system stability are presented in this section, and developed around the following parts.
3.1. Adaptive NN Control Scheme Design
This subsection involves developing an adaptive neural DSC scheme via the backstepping technique, and the following n steps are involved. The estimate error is defined as , and the estimate of is shown as .
First, we design a system such that it can solve the problem of input time-delay as
where is a known constant, the initial condition of the system is .
Furthermore, the following state coordinate transformation is introduced as
where denotes the filtered virtual controller, means the virtual controller, and the construction of is presented in the following part, represents the i-th boundary layer error.
Then, we choose the first symmetric positive-definite Lyapunov function as
where is the estimate error of , .
Let , then the RBF NN approximation property is used such that
where , , .
In view of Lemma 1, we obtain the following inequalities
Then the first virtual control unit is constructed as
where will be designed in (26), and the equivalent virtual unit is constructed as
where is a parameter.
Next, the adaptive laws of and are shown as
with a constant . Based on Lemma 1, we have
The following nonlinear filter is designed
where means a filter time constant, the first boundary layer error is , the estimates of and are and ; they will be constructed later.
The symmetric positive-definite Lyapunov function is presented as
where is the estimate error of , .
Let , then the following equation can be obtained via the RBF NN approximation theory
where , , .
In view of Lemma 1, the following inequalities hold
Construct the i-th virtual control unit as
where will be given in (43). The equivalent virtual unit is proposed as
where is a parameter.
The adaptive laws of and are designed as
where the parameter . By using Lemma 1, the following inequality holds
The nonlinear filtered virtual controller is designed as
where means a filter time constant, the i-th boundary layer error is presented as , the adaptive update laws of and will be designed later.
Design the symmetric positive-definite Lyapunov function as
where is the estimate error of , .
Let , the following equation can be proposed via the RBF NN approximation theory
where , , .
In view of Lemma 1, we can obtain
We construct the control signal u as
where will be designed in (58), and the equivalent virtual unit is proposed as
Develop the update laws of and as
where the parameter . Then, one can obtain, based on Lemma 1
In view of ([49], Assumption 1) and Lemma 3, one holds
where , and are positive unknown smooth functions.
Consider the following symmetric positive-definite Lyapunov function
where is a Lyapunov–Krasovskii function, which is defined as
The time derivative of (63) is given as
3.2. Stability Analysis
The proof of system stability will be given in this section.
The boundary layer errors satisfy
where
are continuous functions.
The main result of this paper is summarized by the following theorem.
Theorem 1.
The closed-loop system is considered, including the plant (1), the control units (23), (40) and (55), the nonlinear filters virtual controller (29) and (46), and the adaptive update laws (25) and (26), (42) and (43), (57) and (58), (77) and (78). Then the following statements are guaranteed based on the Assumption 1 and some appropriate parameters , , , , , , , and ,
(i) The semi-global bounded stability in probability of all the signals in this system is achieved.
(ii) The system output signal is asymptotically stable in probability.
Proof.
The compact set is designed as follows
Therefore, there exists positive constants , such that on and , where and are unknown parameters. Then, the system stability analysis is presented as follows.
Choose the whole Lyapunov function V as follows
with some constants , .
Then, one holds
The following inequalities are hold by using Lemma 2
and
The adaptive update laws of and are presented as follows
and
In view of Lemma 1, we can obtain that
and
Therefore, the following inequality holds
where .
In view of (81), one can obtain
where . Thus, the signals of this closed-loop system remain semi-global bounded in probability.
Next, the boundedness of is proved as following.
It is easy to verify that , where is a parameter.
Choose the candidate Lyapunov function
then the derivative of is shown as
where , , .
Thus, the boundedness of can be obtained.
Then, we set , such that based on ([49], Lemma 4). Hence, from (25), (42), (57), the following inequalities can be obtained
In view of (86), one has
In addition, based on (87) and Lemma 4, we can obtain that is bounded, and the boundedness of can be guaranteed. Therefore, the following inequality can be obtained
Then, the following equation can be obtained via stochastic Barbalat’s lemma
which means that
That is, the system output signal is asymptotically stable in probability. □
4. Simulation Results
Consider the following stochastic nonlinear system
where , , , , , , , .
We design the virtual controller as
where
The update laws of and are proposed as
The filtered virtual controller with the novel nonlinear filter is designed as
where
and
Design control signal u as
where
with the update laws of and as
and
The nodes number of the first RBF NN is 9, the center is placing on , and we design the Gaussian functions width as . The nodes number of the second RBF NN is 576, the center is placing on , and we design the Gaussian functions width as .
The parameters are selected as , , , , , , , , , . For this closed-loop system, we design the initial values as , , , , , , , .
Figure 1, Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6 show the simulation results. Figure 1 presents the system state from which it can be seen that the asymptotic regulation is achieved. The input signal u is presented in Figure 2. The adaptive update laws of , , and , are shown in Figure 3 and Figure 4, respectively. The curves of filter parameters and are displayed in Figure 5 and Figure 6 presents the compensation system state . According to the simulation results, we can ensure that the objective of this paper is achieved.
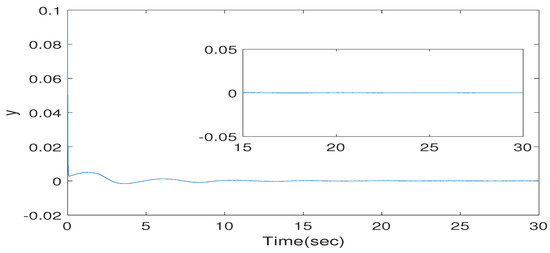
Figure 1.
The system output signal y.
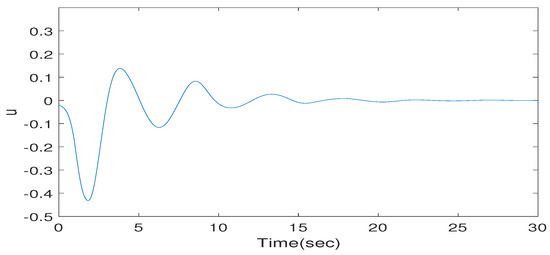
Figure 2.
Control input signal u.
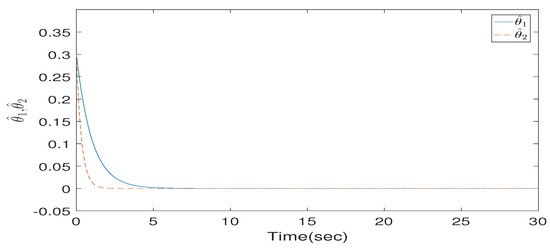
Figure 3.
The adaptation laws and .
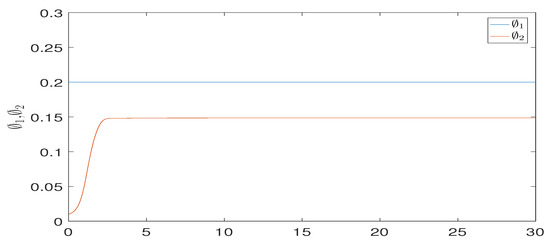
Figure 4.
The adaptation laws and .
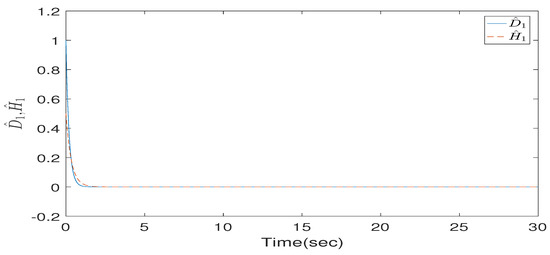
Figure 5.
The adaptation parameters and .
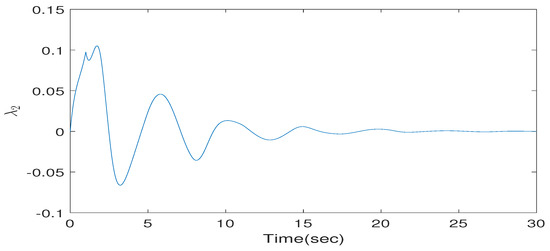
Figure 6.
The compensation system state .
5. Conclusions
This paper addresses the adaptive neural DSC problem for the uncertain stochastic nonlinear systems with state and input time-varying delays. To compensate for the effect of time-varying delays, a compensation system and the Lyapunov–Krasovskii functional scheme are presented. The DSC method with nonlinear filter was developed to avoid the“explosion of complexity”. Compared with the existing works, under controlling of this developed adaptive neural controller, the asymptotic regulation performance of this closed-loop system can be guaranteed based on the use of the DSC scheme with the nonlinear filter and the stochastic Barbalat lemma. Specifically, all signals of this closed-loop system are semi-globally bounded in probability, in particularly, the output signal is asymptotically stable in probability. To certify the availability of the presented control scheme, simulation results were shown.
Author Contributions
Conceptualization, J.L. and Q.Z.; methodology, X.C. and Z.W.; validation, X.C.; formal analysis, X.C.; investigation, X.C. and Q.Z.; resources, X.C. and J.L.; data curation, X.C. and Z.W.; writing—original draft preparation, X.C. and Q.Z.; writing—review and editing, X.C., J.L. and Q.Z.; visualization, X.C. and Z.W.; supervision, J.L. and Q.Z.; project administration, X.C. and Q.Z.; funding acquisition, Q.Z. All authors have read and agreed to the published version of the manuscript.
Funding
National Natural Science Foundation of China (61603003).
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Acknowledgments
This work is supported in part by the National Natural Science Foundation of China (61603003).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yu, X.; Xie, X. Output Feedback Regulation of Stochastic Nonlinear Systems with Stochastic iISS Inverse Dynamics. IEEE Trans. Autom. Control 2011, 55, 304–320. [Google Scholar]
- Zhou, Q.; Shi, P.; Liu, H.; Xu, S. Neural-Network-Based Decentralized Adaptive Output-Feedback Control for Large-Scale Stochastic Nonlinear Systems. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2012, 42, 1608–1619. [Google Scholar] [CrossRef]
- Tong, S.; Wang, T.; Li, Y.; Zhang, H. Adaptive Neural Network Output Feedback Control for Stochastic Nonlinear Systems with Unknown Dead-Zone and Unmodeled Dynamics. IEEE Trans. Cybern. 2014, 44, 910–921. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Liu, K.; Liu, X.; Chen, B.; Lin, C. Neural-Based Adaptive Output-Feedback Control for a Class of Nonstrict-Feedback Stochastic Nonlinear Systems. IEEE Trans. Cybern. 2015, 45, 1977–1987. [Google Scholar] [CrossRef]
- Fang, L.; Ma, L.; Ding, S.; Zhao, D. Finite-time Stabilization for a Class of High-Order Stochastic Nonlinear Systems with an Output Constraint. Appl. Math. Comput. 2019, 358, 63–79. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, X.; Zong, G.; Zheng, X. Adaptive Neural Tracking Control for Switched High-Order Stochastic Nonlinear Systems. IEEE Trans. Cybern. 2017, 47, 3088–3099. [Google Scholar] [CrossRef]
- Jiang, M.; Xie, X.; Zhang, K. Finite-Time Stabilization of Stochastic High-Order Nonlinear Systems with FT-SISS Inverse Dynamics. IEEE Trans. Autom. Control 2019, 64, 313–320. [Google Scholar] [CrossRef]
- Zhang, J.; Xia, J.; Sun, W.; Zhuang, G.; Wang, Z. Finite-Time Tracking Control for Stochastic Nonlinear Systems with Full State Constraints. Appl. Math. Comput. 2018, 338, 207–220. [Google Scholar] [CrossRef]
- Yu, X.; Wang, T.; Qiu, J.; Gao, H. Barrier Lyapunov Function-Based Adaptive Fault-Tolerant Control for a Class of Strict-Feedback Stochastic Nonlinear Systems. IEEE Trans. Cybern. 2021, 51, 938–946. [Google Scholar] [CrossRef] [PubMed]
- Sun, K.; Mou, S.; Qiu, J.; Wang, T.; Gao, H. Adaptive Fuzzy Control for Nontriangular Structural Stochastic Switched Nonlinear Systems with Full State Constraints. IEEE Trans. Fuzzy Syst. 2019, 27, 1587–1601. [Google Scholar] [CrossRef]
- Sui, S.; Li, Y.; Tong, S. Observer-Based Adaptive Fuzzy Control for Switched Stochastic Nonlinear Systems with Partial Tracking Errors Constrained. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 1605–1617. [Google Scholar] [CrossRef]
- Wang, H.; Liu, K.; Liu, X.; Chen, B.; Lin, C. Adaptive Neural Tracking Control for a Class of Nonstrict-Feedback Stochastic Nonlinear Systems with Unknown Backlash-Like Hysteresis. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 947–958. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Liu, Z.; Zhang, Y.; Chen, C.L.P. Neural Adaptive Event-Triggered Control for Nonlinear Uncertain Stochastic Systems with Unknown Hysteresis. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3300–3312. [Google Scholar] [CrossRef] [PubMed]
- Min, H.; Xu, S.; Zhang, Z. Adaptive Finite-Time Stabilization of Stochastic Nonlinear Systems Subject to Full-State Constraints and Input Saturation. IEEE Trans. Autom. Control 2021, 66, 1306–1313. [Google Scholar] [CrossRef]
- Niu, B.; Li, H.; Zhang, Z.; Li, J.; Hayat, T.; Alsaadi, F.E. Adaptive Neural-Network-Based Dynamic Surface Control for Stochastic Interconnected Nonlinear Nonstrict-Feedback Systems with Dead Zone. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1386–1398. [Google Scholar] [CrossRef]
- Zhu, Y.; Krstic, M.; Su, H. PDE Boundary Control of Multi-Input LTI Systems with Distinct and Uncertain Input Delays. IEEE Trans. Autom. Control 2018, 63, 4270–4277. [Google Scholar] [CrossRef]
- Lin, X.; Zhang, W.; Huang, S.; Zheng, E. Finite-Time Stabilization of Input-Delay Switched Systems. Appl. Math. Comput. 2020, 375, 125062. [Google Scholar] [CrossRef]
- Ma, J.; Xu, S.; Zhuang, G.; Wei, Y. Adaptive Neural Network Tracking Control for Uncertain Nonlinear Systems with Input Delay and Saturation. Int. J. Robust Nonlinear Control 2020, 30, 2593–2610. [Google Scholar] [CrossRef]
- Wang, T.; Wu, J.; Wang, Y.; Ma, M. Adaptive Fuzzy Tracking Control for A Class of Strict-Feedback Nonlinear Systems with Time-Varying Input Delay and Full State Constraints. IEEE Trans. Fuzzy Syst. 2020, 28, 3432–3441. [Google Scholar] [CrossRef]
- Zhang, Q.; He, D. Disturbance-Observer-Based Adaptive Fuzzy Control for Strict-Feedback Switched Nonlinear Systems with Input Delay. IEEE Trans. Fuzzy Syst. 2021, 29, 1942–1952. [Google Scholar] [CrossRef]
- Gao, H.; Li, X. H∞ Filtering for Discrete-Time State-Delayed Systems with Finite Frequency Specifications. IEEE Trans. Autom. Control 2011, 56, 2935–2941. [Google Scholar] [CrossRef]
- Yuan, C.; Wu, F. Dynamic IQC-Based Control of Uncertain LFT Systems with Time-Varying State Delay. IEEE Trans. Cybern. 2016, 46, 3320–3329. [Google Scholar] [CrossRef] [PubMed]
- Mohajerpoor, R.; Shanmugam, L.; Abdi, H.; Nahavandi, S.; Park, J.H. Delay-Dependent Functional Observer Design for Linear Systems with Unknown Time-Varying State Delays. IEEE Trans. Cybern. 2018, 48, 2036–2048. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Xie, X. Adaptive Fuzzy Control for High-Order Nonlinear Time-Delay Systems with Full-State Constraints and Input Saturation. IEEE Trans. Fuzzy Syst. 2020, 28, 1652–1663. [Google Scholar] [CrossRef]
- Lu, C. A Delay-Range-Dependent Approach to Design State Estimator for Discrete-Time Recurrent Neural Networks with Interval Time-Varying Delay. IEEE Trans. Circuits Syst. II Express Briefs 2008, 55, 1163–1167. [Google Scholar] [CrossRef]
- Liu, M.; Chen, H. H∞ State Estimation for Discrete-Time Delayed Systems of the Neural Network Type with Multiple Missing Measurements. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 2987–2998. [Google Scholar] [CrossRef]
- Liu, H.; Wang, Z.; Shen, B.; Dong, H. Delay-Distribution-Dependent H∞ State Estimation for Discrete-Time Memristive Neural Networks with Mixed Time-Delays and Fading Measurements. IEEE Trans. Cybern. 2020, 50, 440–451. [Google Scholar] [CrossRef]
- Zhou, Q.; Shi, P.; Xu, S.; Li, H. Adaptive Output Feedback Control for Nonlinear Time-Delay Systems by Fuzzy Approximation Approach. IEEE Trans. Fuzzy Syst. 2013, 21, 301–313. [Google Scholar] [CrossRef]
- Battilotti, S. Continuous-Time and Sampled-Data Stabilizers for Nonlinear Systems with Input and Measurement Delays. IEEE Trans. Autom. Control 2020, 65, 1568–1583. [Google Scholar] [CrossRef]
- Long, F.; Jiang, L.; He, Y.; Wu, M. Stability Analysis of Systems with Time-Varying Delay via Novel Augmented Lyapunov–Krasovskii Functionals and an Improved Integral Inequality. Appl. Math. Comput. 2019, 357, 325–337. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, F. Adaptive Neural Control of Non-Strict Feedback System with Actuator Failures and Time-Varying Delays. Appl. Math. Comput. 2019, 362, 124512. [Google Scholar] [CrossRef]
- Long, F.; Zhang, C.; Jiang, L.; He, Y.; Wu, M. Stability Analysis of Systems with Time-Varying Delay via Improved Lyapunov–Krasovskii Functionals. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2457–2466. [Google Scholar] [CrossRef]
- Shen, J.; Lam, J. ℓ∞/L∞-Gain Analysis for Positive Linear Systems with Unbounded Time-Varying Delays. IEEE Trans. Autom. Control 2015, 60, 857–862. [Google Scholar] [CrossRef]
- Li, D.; Liu, L.; Liu, Y.; Tong, S.; Chen, C.L.P. Adaptive NN Control without Feasibility Conditions for Nonlinear State Constrained Stochastic Systems with Unknown Time Delays. IEEE Trans. Cybern. 2019, 49, 4485–4494. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Li, Z.; Wang, D.; Chen, C.L.P. Output-Feedback Adaptive Neural Control for Stochastic Nonlinear Time-Varying Delay Systems with Unknown Control Directions. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 1188–1201. [Google Scholar] [CrossRef] [PubMed]
- Min, H.; Xu, S.; Zhang, B.; Ma, Q. Output-Feedback Control for Stochastic Nonlinear Systems Subject to Input Saturation and Time-Varying Delay. IEEE Trans. Autom. Control 2019, 64, 359–364. [Google Scholar] [CrossRef]
- Chen, W.; Jiao, L.; Li, J.; Li, R. Adaptive NN Backstepping Output-Feedback Control for Stochastic Nonlinear Strict-Feedback Systems with Time-Varying Delays. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2010, 40, 939–950. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Liu, X.; Liu, K.; Karimi, H.R. Approximation-Based Adaptive Fuzzy Tracking Control for a Class of Nonstrict-Feedback Stochastic Nonlinear Time-Delay Systems. IEEE Trans. Fuzzy Syst. 2015, 23, 1746–1760. [Google Scholar] [CrossRef]
- Wang, Z.; Shen, B.; Shu, H.; Wei, G. Quantized H∞ Control for Nonlinear Stochastic Time-Delay Systems with Missing Measurements. IEEE Trans. Autom. Control 2012, 57, 1431–1444. [Google Scholar] [CrossRef] [Green Version]
- Yu, Z.; Yan, H.; Li, S.; Dong, Y. Approximation-Based Adaptive Tracking Control for Switched Stochastic Strict-Feedback Nonlinear Time-Delay Systems with Sector-Bounded Quantization Input. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 2145–2157. [Google Scholar] [CrossRef]
- Liu, L.; Yin, S.; Zhang, L.; Yin, X.; Yan, H. Improved Results on Asymptotic Stabilization for Stochastic Nonlinear Time-Delay Systems with Application to a Chemical Reactor System. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 195–204. [Google Scholar] [CrossRef]
- Gao, F.; Yuan, F.; Wu, Y. State-Feedback Stabilisation for Stochastic Non-Holonomic Systems with Time-Varying Delays. IET Control Theory Appl. 2012, 6, 2593–2600. [Google Scholar] [CrossRef]
- Li, Z.; Li, T.; Feng, G.; Zhao, R.; Shan, Q. Neural Network-Based Adaptive Control for Pure-Feedback Stochastic Nonlinear Systems with Time-Varying Delays and Dead-Zone Input. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 5317–5329. [Google Scholar] [CrossRef]
- Min, H.; Xu, S.; Zhang, B.; Ma, Q. Globally Adaptive Control for Stochastic Nonlinear Time-Delay Systems with Perturbations and Its Application. Automatica 2019, 102, 105–110. [Google Scholar] [CrossRef]
- Wu, J.; Wu, Z.; Li, J.; Wang, G.; Zhao, H.; Chen, W. Practical Adaptive Fuzzy Control of Nonlinear Pure-Feedback Systems with Quantized Nonlinearity Input. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 638–648. [Google Scholar] [CrossRef]
- Zuo, Z.Y.; Wang, C.L. Adaptive Trajectory Tracking Control of Output Constrained Multi-rotors Systems. IET Control Theory Appl. 2014, 8, 1163–1174. [Google Scholar] [CrossRef]
- Zheng, Z.; Xia, Y.; Fu, M. Attitude Stabilization of Rigid Spacecraft with Finite-Time Convergence. Int. J. Robust Nonlinear Control 2011, 21, 686–702. [Google Scholar]
- Zhou, Q.; Shi, P.; Xu, S.; Li, H. Observer-Based Adaptive Neural Network Control for Nonlinear Stochastic Systems with Time Delay. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 71–80. [Google Scholar] [CrossRef]
- Wu, J.; Chen, X.; Zhao, Q.; Li, J.; Wu, Z. Adaptive Neural Dynamic Surface Control with Prespecified Tracking Accuracy of Uncertain Stochastic Nonstrict-Feedback Systems. IEEE Trans. Cybern. 2020. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).