
A Novel Algorithm for Capacitated Vehicle Routing Problem for Smart Cities

 , ,
, ,  ,
,  ,
,  and
and
Abstract
:1. Introduction
- A problem-specific crossover operator is proposed, i.e., giant tour best cost crossover (GTBCX) operator for the CVRP.
- The routing algorithm, which combines NSGA-II and GTBCX, is proposed to resolve the bi-objective CVRP.
- An extensive simulation is performed on 88 CVRP benchmark instances to check the efficacy of the proposed GTBCX operator and routing algorithm by the number and quality of Pareto solutions offered.
2. Related Work
- CVRP with the longest route length as the objective;
- CVRP with overall total traveled distance or other cost functions as the objectives;
- NSGA-II employed in the CVRP domain with different objectives
3. Bi-Objective Capacitated Vehicle Routing Problem
4. The Proposed Work
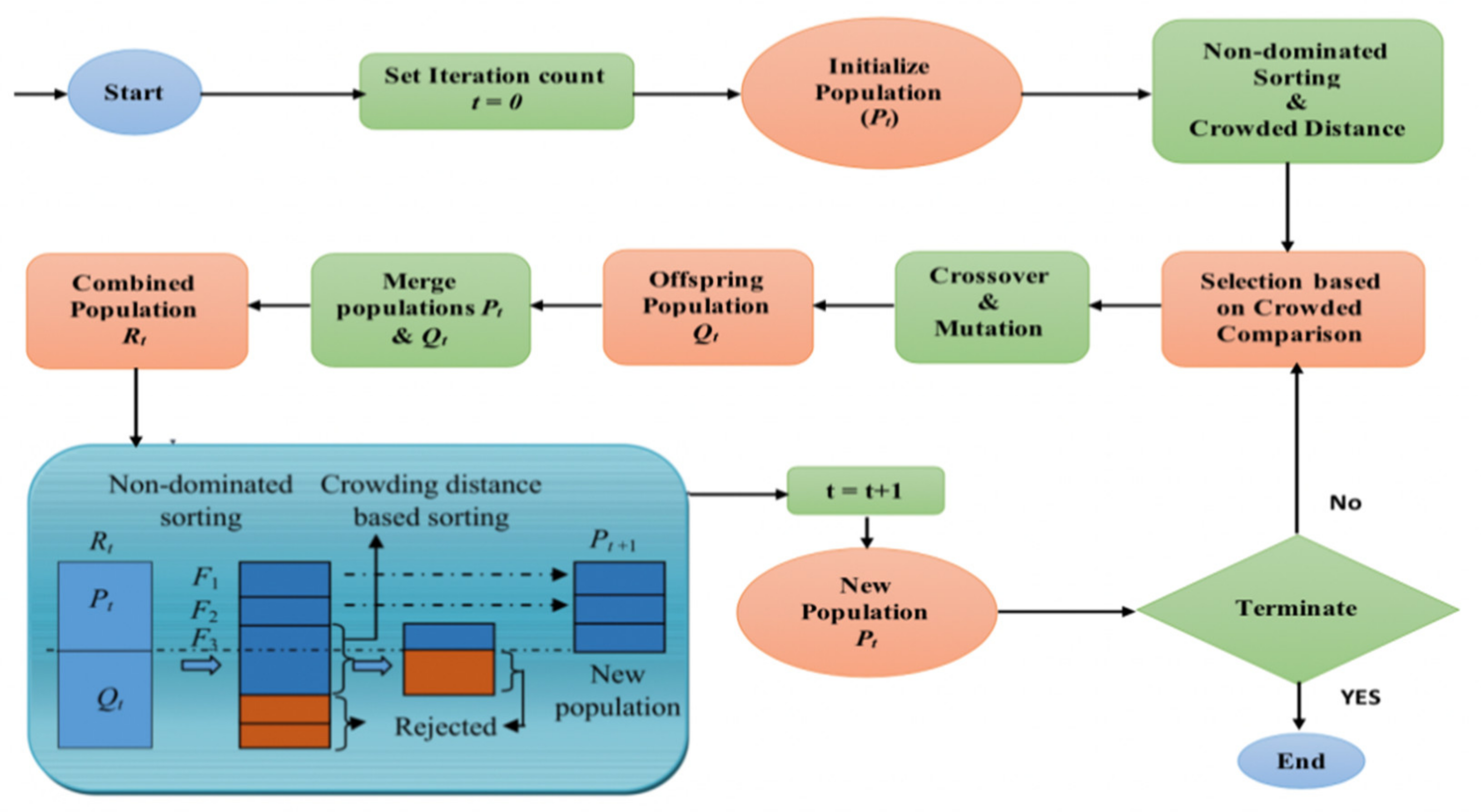
4.1. NSGA-II-Based Routing Algorithm
4.2. Chromosome Initialization and Evaluation
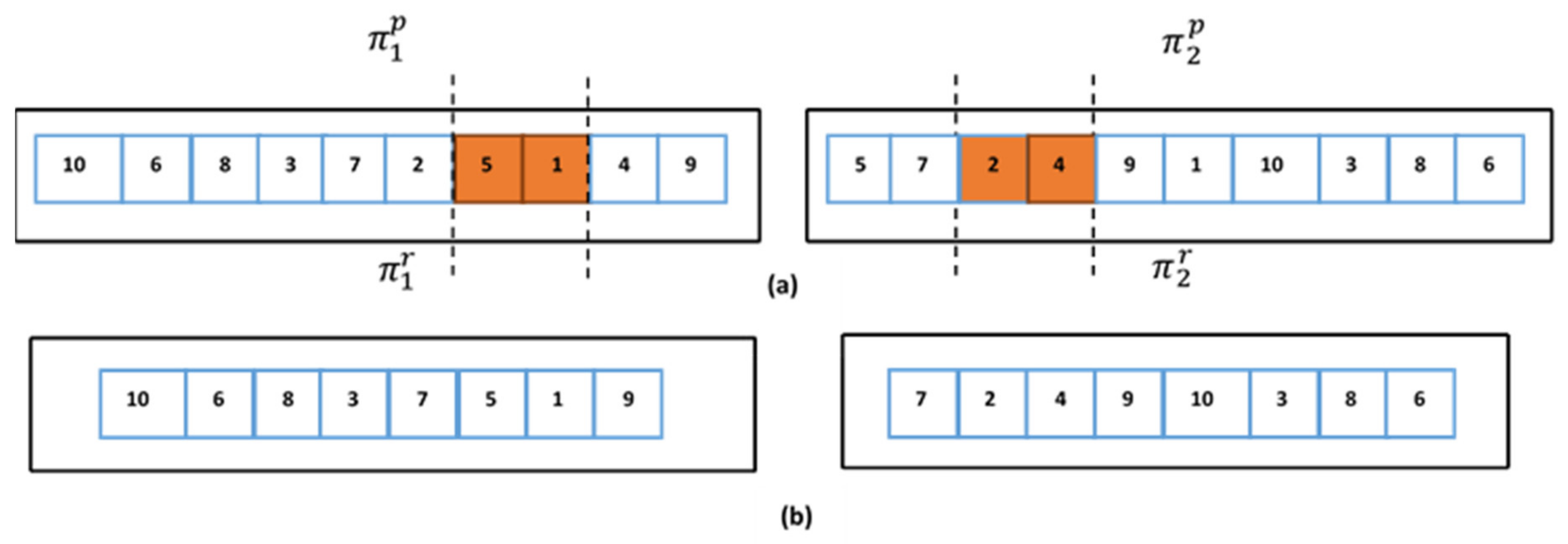
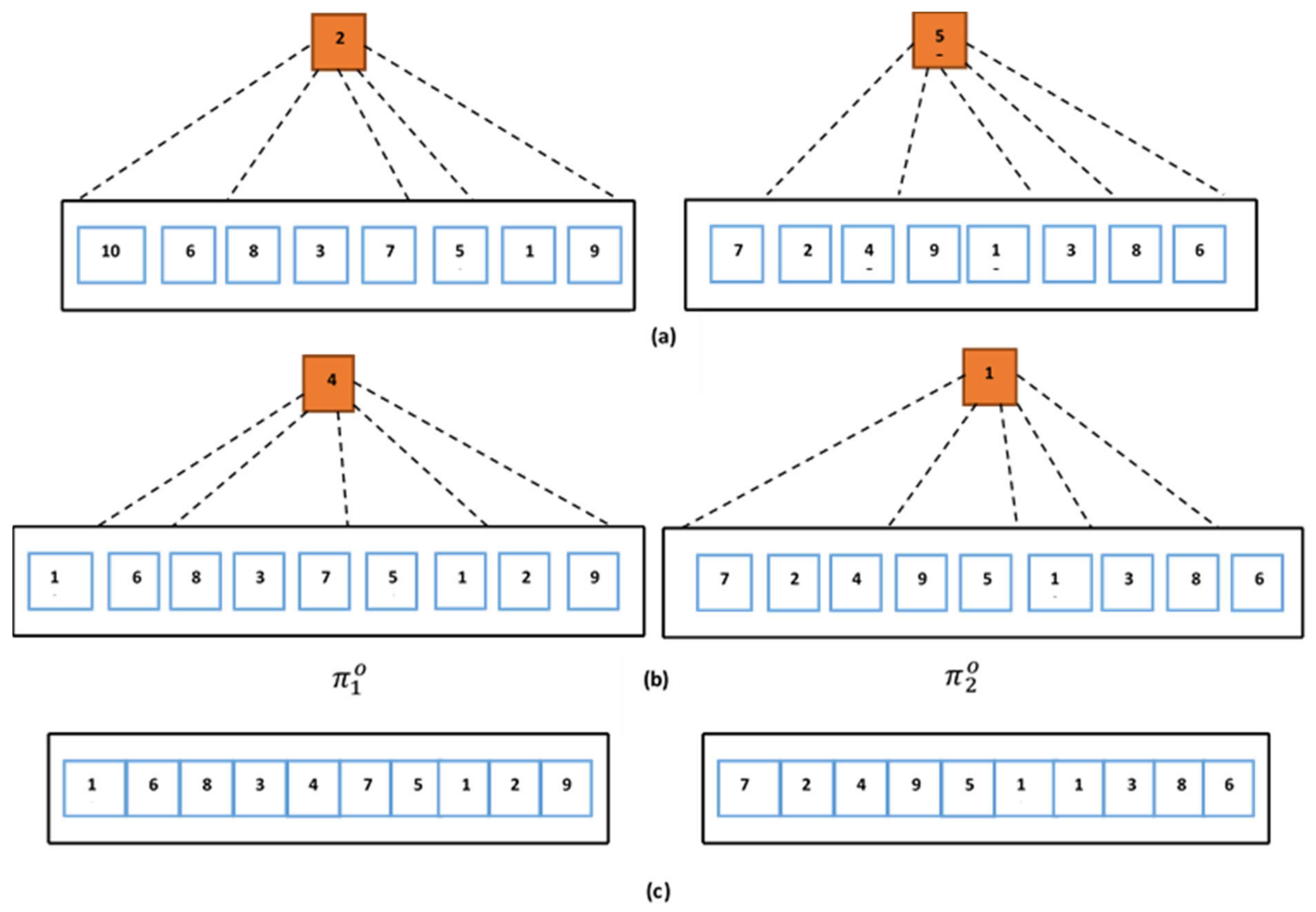
4.3. Giant Tour Best Cost Crossover (GTBCX) Operator
4.4. Mutation Operator
5. Simulation Study
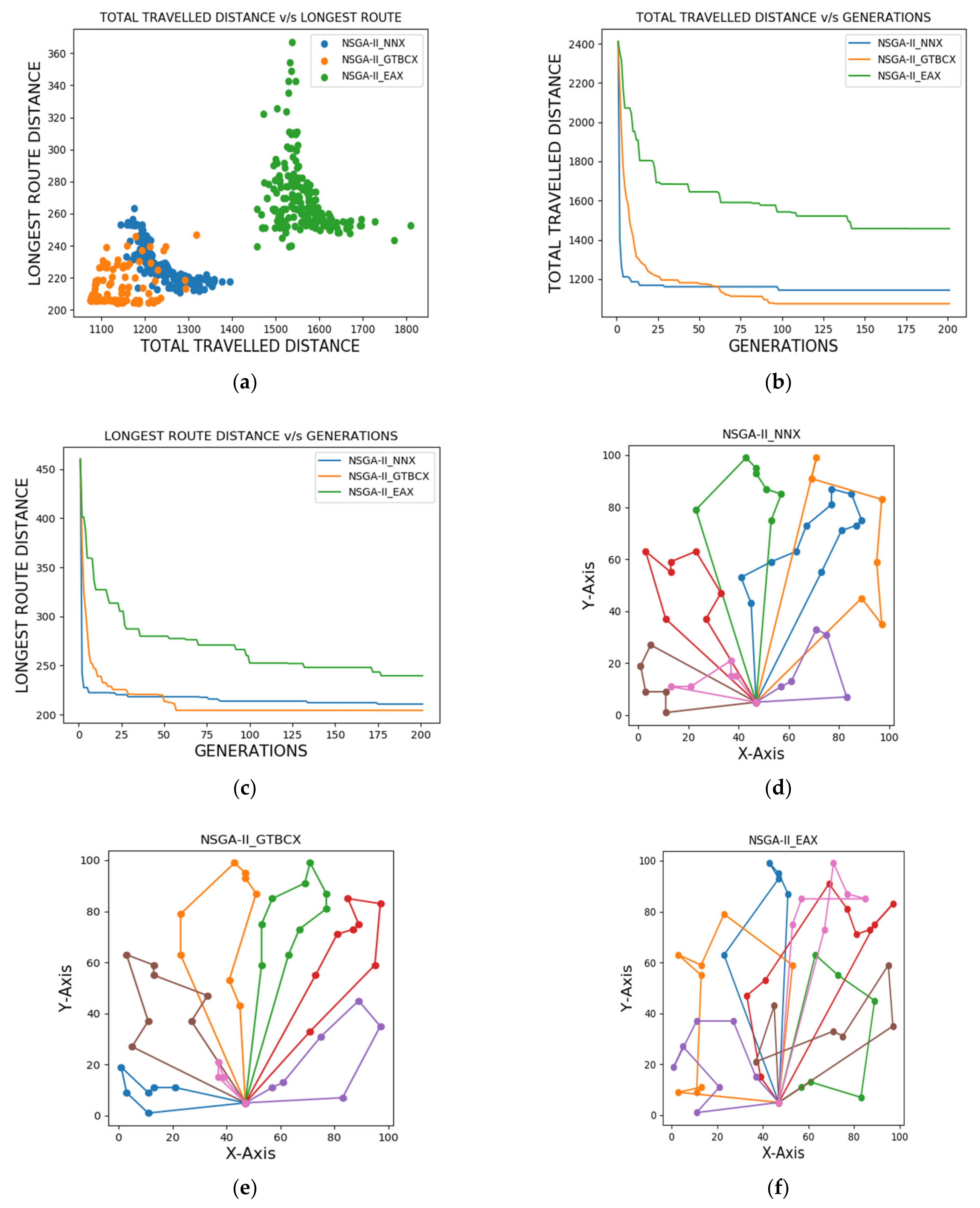
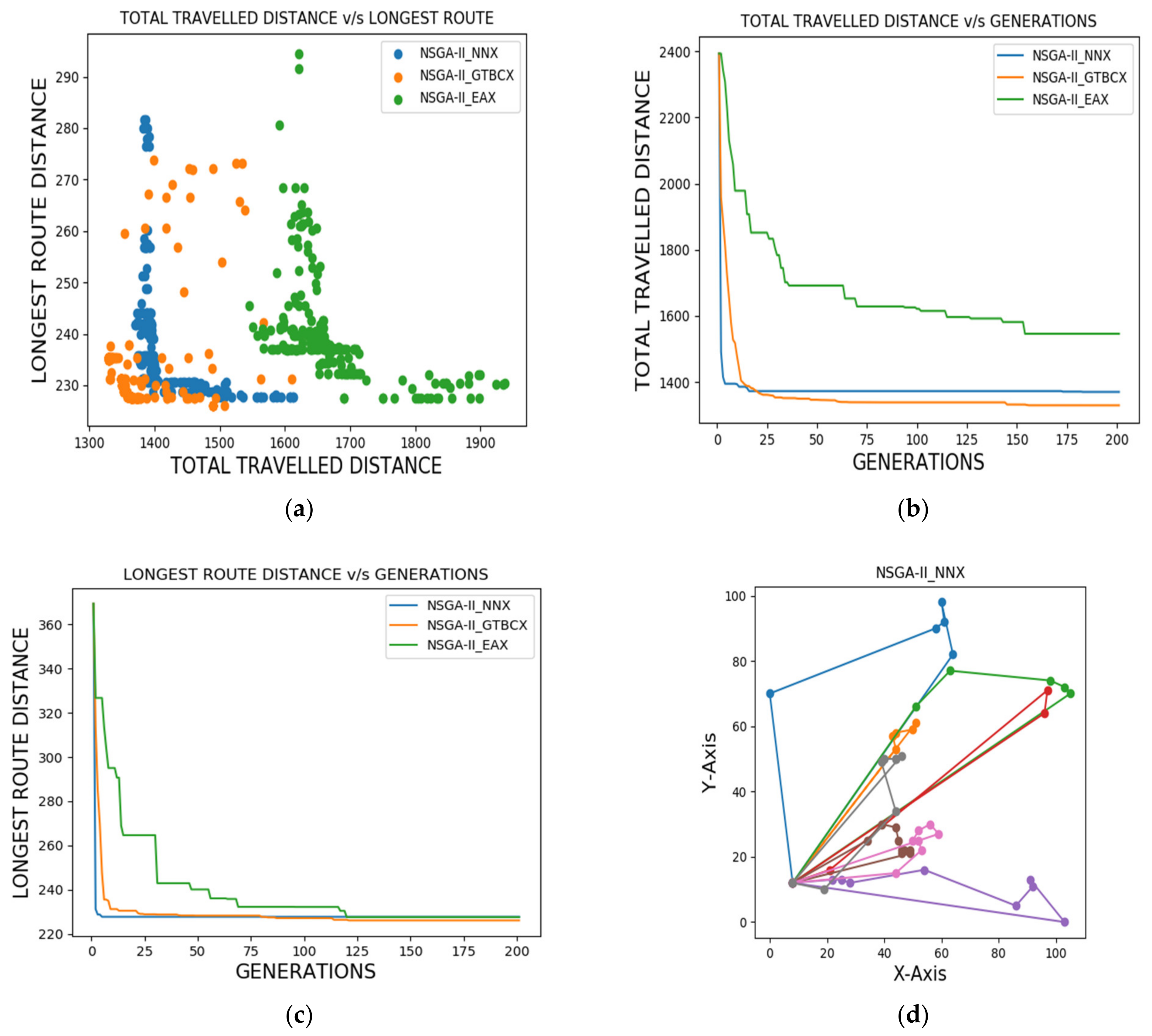
- For all sets, A, B, P, E, and F, the overall performance order from best to worst is given as NSGA-II_GTBCX, NSGA-II_NNX, and NSGA-II_EAX. Pareto solutions offered by NSGA-II_GTBCX dominates all Pareto solutions offered by NSGA-II_EAX. However, there are very few solutions offered by NSGA-II_NNX that dominate the worst Pareto solutions offered by NSGA-II_GTBCX. However, there are some solutions offered by NSGA-II_GTBCX that completely dominate all solutions of NSGA-II_NNX. For most CVRP instances, NSGA-II_GTBCX offered the total traveled distance close to the best-known solution. However, the value of the best-known solution is offered by the single objective optimization method, which does not consider the other objectives. This shows that the proposed GTBCX operator is superior to the NNX and EAX operators in the context of CVRP.
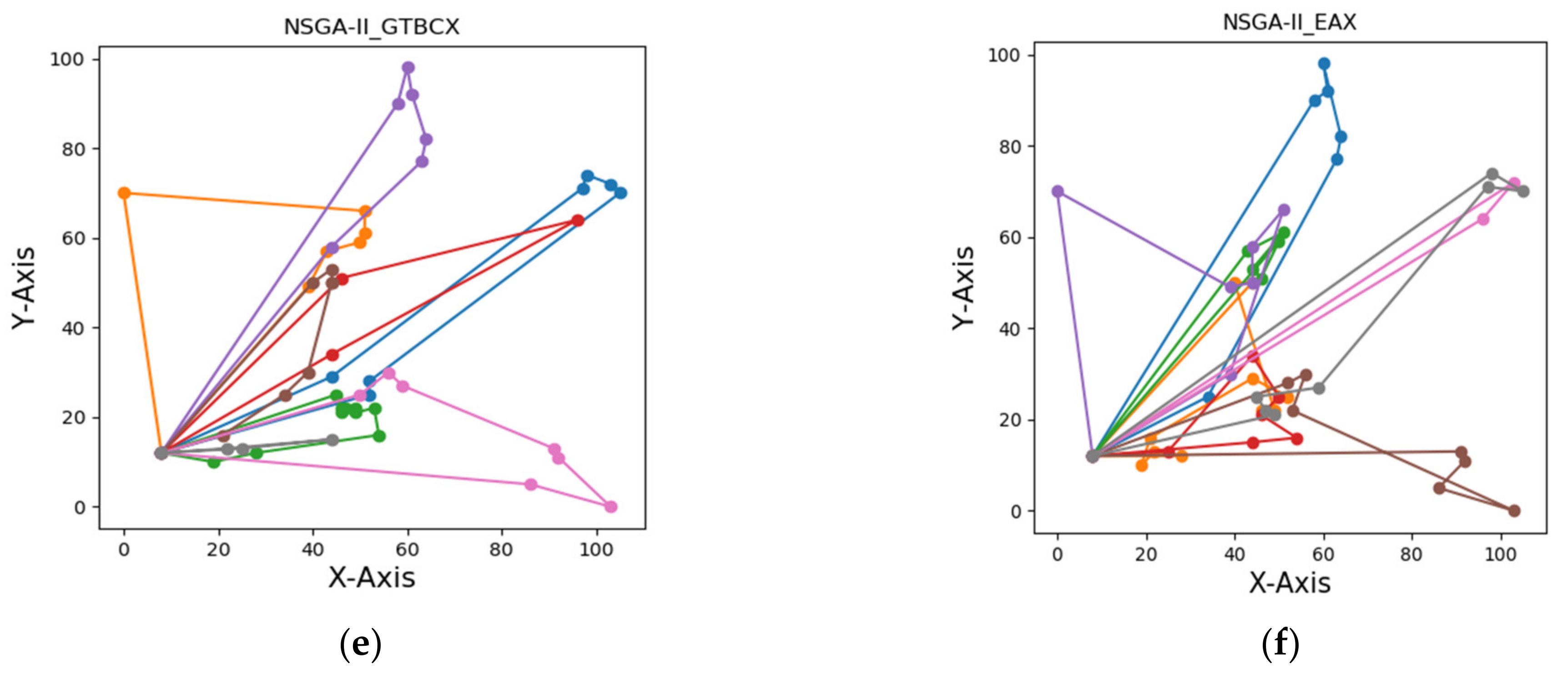
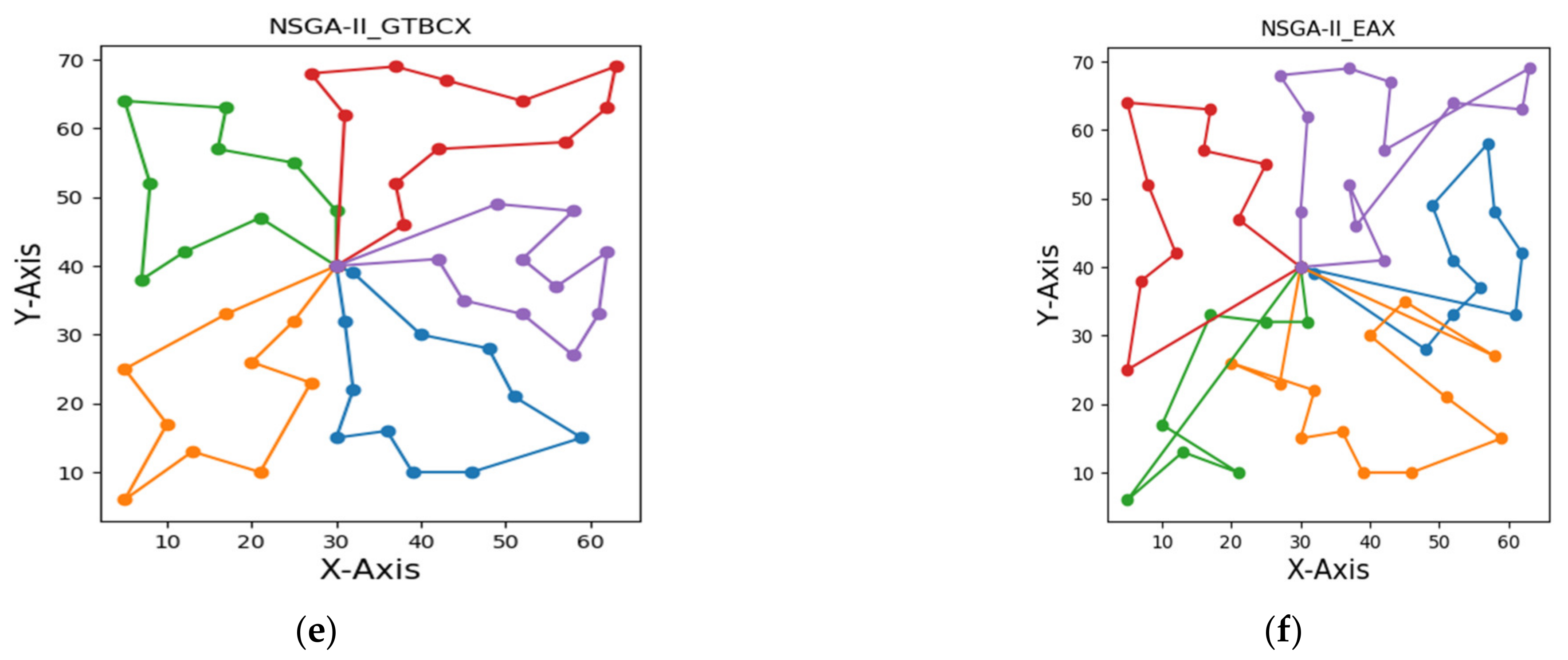
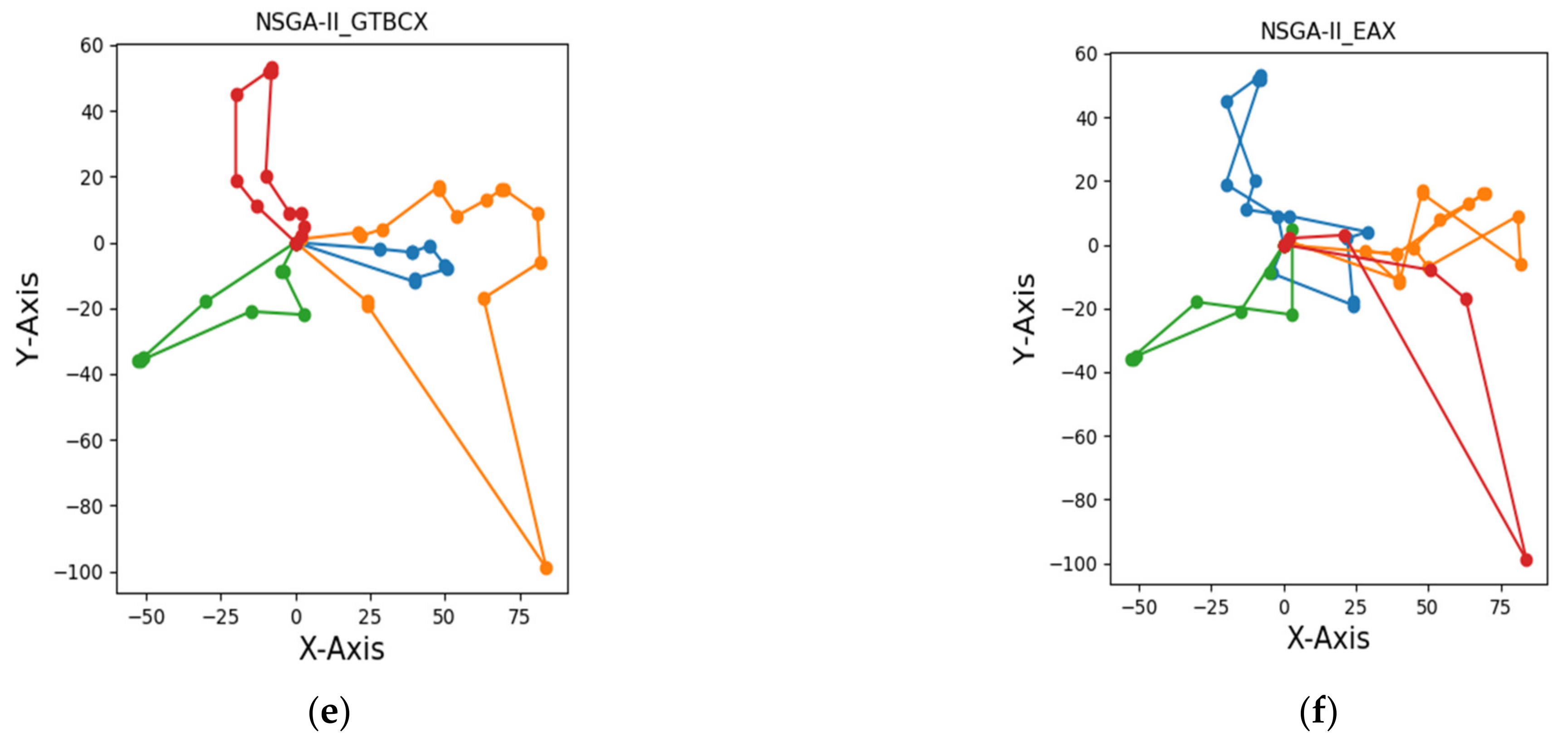
- Since the minimal overlapping of routes leads to a better quality of solutions and helps provide better values of total traveled distance and the longest route. The overlapping of routes is minimal in the best Pareto solution offered by NSGA-II_GTBCX, while it is maximal in the best solution offered by NSGA-II_EAX. This shows that NSGA-II_GTBCX is a better performer in comparison to NSGA-II_NNX and NSGA-II_EAX.
- As the proposed NSGA-II-based routing algorithm offers solutions with a trade-off between the overall distance traveled and the route with the longest length, the user can employ different solutions to meet their requirements.
- It is also observed that the quality of the final solutions is affected by the quality of initial solutions. Intelligent heuristics can be developed to generate good initial solutions.
- The duplicate solutions are also observed during the evolution process, and therefore, intelligent heuristics can be developed to deal with duplicate solutions.
- It is also observed from the simulation study that the order of time complexity from best to worst is given as NSGA-II_NNX, NSGA-II_EAX, and NSGA-II_GTBCX. To reduce the time overheads of NSGA-II_GTBCX, the quantum-inspired algorithm can also be applied.
- The proposed multi-objective algorithms can also be extended for different CVRP variants, i.e., CVRP with time windows, drones, multiple depots, multiple/many echelons, split deliveries, and others.
- Cloud computing and vehicles linked through the Internet of Things can also be used for the execution of the proposed NSGA-II-based routing algorithm [51].
- The concept of blockchain can also be incorporated in the proposed algorithm for making decisions based on trustworthy data across the transportation and logistics ecosystem.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, S.C.; Zhang, Y.F.; Liu, Y.; Wang, L.H.; Wang, X.V. An Internet of Things enabled dynamic optimization method for smart vehicles and logistics tasks. J. Clean Prod. 2019, 215, 806–820. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Liu, Y.X.; Xiong, N.N.; Zhang, N.; Liu, A.F.; Shen, H.L.; Huang, C.Q. Construction of large-scale, low-cost delivery infrastructure using vehicular networks. IEEE Access 2018, 6, 21482–21497. [Google Scholar] [CrossRef]
- Toth, P.; Vigo, D. Vehicle Routing: Problems, Methods, and Applications, 2nd ed.; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2015; pp. 1–33. [Google Scholar]
- Goudarzi, S.; Kama, N.; Anisi, M.H.; Zeadally, S.; Mumtaz, S. Data collection using unmanned aerial vehicles for Internet of Things platforms. Comput. Electr. Eng. 2019, 75, 1–15. [Google Scholar] [CrossRef]
- Yao, Y.; Zhang, Y.; Tian, L.; Zhou, N.; Li, Z.; Wang, M. Analysis of Network Structure of Urban Bike-Sharing System: A Case Study Based on Real-Time Data of a Public Bicycle System. Sustainability 2019, 11, 5425. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.A.; Hossain, A.-A.; Debnath, B.; Zefat, Z.M.; Morshed, M.S.; Adnan, Z.H. Intelligent Vehicle Scheduling and Routing for a Chain of Retail Stores: A Case Study of Dhaka, Bangladesh. Logistics 2021, 5, 63. [Google Scholar] [CrossRef]
- Khan, S.I.; Qadir, Z.; Munawar, H.S.; Nayak, S.R.; Budati, A.K.; Verma, K.D.; Prakash, D. UAVs path planning architecture for effective medical emergency response in future networks. Phys. Commun. 2021, 47, 101337. [Google Scholar] [CrossRef]
- He, P.; Li, J. The two-echelon multi-trip vehicle routing problem with dynamic satellites for crop harvesting and transportation. Appl. Soft Comput. 2019, 77, 387–398. [Google Scholar] [CrossRef]
- Sabar, N.R.; Bhaskar, A.; Chung, E.; Turky, A.; Song, A. A self-adaptive evolutionary algorithm for dynamic vehicle routing problems with traffic congestion. Swarm Evol. Comput. 2019, 44, 1018–1027. [Google Scholar] [CrossRef]
- Potvin, J.Y. State-of-the Art Review—Evolutionary Algorithms for Vehicle Routing. INFORMS J. Comput. 2009, 21, 518–548. [Google Scholar] [CrossRef]
- Demir, E.; Huckle, K.; Syntetos, A.; Lahy, A.; Wilson, M. Vehicle Routing Problem: Past and Future. In Contemporary Operations and Logistics: Achieving Excellence in Turbulent Times; Wells, P., Ed.; Springer International Publishing: Cham, Switzerland, 2019; pp. 97–117. [Google Scholar]
- Rabbouch, B.; Saâdaoui, F.; Mraihi, F.R. Empirical-type simulated annealing for solving the capacitated vehicle routing problem. J. Exp. Theor. Artif. Intell. 2020, 32, 437–452. [Google Scholar] [CrossRef]
- Lin, N.; Shi, Y.; Zhang, T.; Wang, X. An effective order-aware hybrid genetic algorithm for capacitated vehicle routing problems in Internet of Things. IEEE Access 2019, 7, 86102–86114. [Google Scholar] [CrossRef]
- Altabeeb, A.M.; Mohsen, A.M.; Ghallab, A. An improved hybrid firefly algorithm for capacitated vehicle routing problem. Appl. Soft Comput. 2019, 84, 105728. [Google Scholar] [CrossRef]
- Saini, N.; Saha, S. Multi-objective optimization techniques: A survey of the state-of-the-art and applications. Eur. Phys. J. Spec. Top. 2021, 230, 2319–2335. [Google Scholar] [CrossRef]
- Sajid, M.; Raza, Z. Energy-efficient quantum-inspired stochastic Q-HypE algorithm for batch-of-stochastic-tasks on heterogeneous DVFS-enabled processors. Concurr. Comput. Pract. Exp. 2019, 31, e5327. [Google Scholar] [CrossRef]
- Sajid, M.; Raza, Z. Energy-Aware Stochastic Scheduler for Batch of Precedence-constrained Jobs on Heterogeneous Computing System. Energy 2017, 125, 258–274. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Aggarwal, S.; Meyarivan, T. A fast elitist multi-objective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Hassanat, A.; Almohammadi, K.; Alkafaween, E.; Abunawas, E.; Hammouri, A.; Prasath, V.B.S. Choosing Mutation and Crossover Ratios for Genetic Algorithms—A Review with a New Dynamic Approach. Information 2019, 10, 390. [Google Scholar] [CrossRef] [Green Version]
- Sajid, M.; Zafar, A.; Sharma, S. Hybrid Genetic and Simulated Annealing Algorithm for Capacitated Vehicle Routing Problem. In Proceedings of the 6th IEEE International Conference on Parallel, Distributed and Grid Computing (PDGC), JUIT Solan, India, 6–8 November 2020; pp. 131–136. [Google Scholar]
- Nagata, Y. Edge Assembly Crossover for the Capacitated Vehicle Routing Problem. In Evolutionary Computation in Combinatorial Optimization (EvoCOP 2007); Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4446. [Google Scholar]
- Whizzkids ‘96. 1996. Available online: http://www.win.tue.nl/whizzkids/1996/index.html (accessed on 29 September 2021).
- Applegate, D.; Cook, W.; Dash, S.; Rohe, A. Solution of a min-max vehicle routing problem. INFORMS J. on Comput. 2002, 14, 132–143. [Google Scholar] [CrossRef] [Green Version]
- Ren, C. Fast Taboo Search Algorithm for Solving Min-Max Vehicle Routing Problem. In Information and Management Engineering; Zhu, M., Ed.; Communications in Computer and Information Science; Springer: Berlin/Heidelberg, Germany, 2011; Volume 236. [Google Scholar]
- Ren, C. Solving Min-Max Vehicle Routing Problem. J. Syst. Softw. 2011, 6, 1851–1856. [Google Scholar] [CrossRef]
- Ren, C. New Genetic Algorithm for Min-Max Vehicle Routing Problem. In Information and Business Intelligence; Qu, X., Yang, Y., Eds.; Communications in Computer and Information Science; Springer: Berlin/Heidelberg, Germany, 2012; Volume 268. [Google Scholar]
- Bertazzi, L.; Golden, B.; Wang, V. Min-Max vs. Min-Sum Vehicle Routing: A Worst-Case Analysis. Eur. J. Oper. Res. 2015, 240, 372–381. [Google Scholar] [CrossRef]
- Yakıcı, E.; Karasakal, O. A min–max vehicle routing problem with split delivery and heterogeneous demand. Optim Lett. 2013, 7, 1611–1625. [Google Scholar] [CrossRef]
- Yakici, E. A Heuristic Approach for Solving a Rich Min-max Vehicle Routing Problem with Mixed Fleet and Mixed Demand. Comput. Ind. Eng. 2017, 109, 288–294. [Google Scholar] [CrossRef]
- Son, N.V.; Dung, P.Q.; Trung, B.Q.; Hoang, N.T. Solving Min-Max Capacitated Vehicle Routing Problem by Local Search. J. Comput. Sci. Cyber. 2017, 33, 3–18. [Google Scholar]
- Bahri, O.; Amor, N.B.; Talbi, E. Robust Routes for the Fuzzy Multi-objective Vehicle Routing Problem. IFAC Pap. OnLine 2016, 49, 769–774. [Google Scholar] [CrossRef]
- Konstantakopoulos, G.D.; Gayialis, S.P.; Kechagias, E.P.; Papadopoulos, G.A.; Tatsiopoulos, I.P. A Multiobjective Large Neighborhood Search Metaheuristic for the Vehicle Routing Problem with Time Windows. Algorithms 2020, 13, 243. [Google Scholar] [CrossRef]
- Fava, L.P.; Furtado, J.C.; Helfer, G.A.; Barbosa, J.L.V.; Beko, M.; Correia, S.D.; Leithardt, V.R.Q. A Multi-Start Algorithm for Solving the Capacitated Vehicle Routing Problem with Two-Dimensional Loading Constraints. Symmetry 2021, 13, 1697. [Google Scholar] [CrossRef]
- Buckow, J.N.; Graf, B.; Knust, S. The exponential multi-insertion neighborhood for the vehicle routing problem with unit demands. Comput. Oper. Res. 2020, 120, 104949. [Google Scholar] [CrossRef]
- Tirkolaee, E.B.; Hosseinabadi, A.A.R.; Soltani, M.; Sangaiah, A.K.; Wang, J. A Hybrid Genetic Algorithm for Multi-Trip Green Capacitated Arc Routing Problem in the Scope of Urban Services. Sustainability 2018, 10, 1366. [Google Scholar] [CrossRef] [Green Version]
- Wu, L.; He, Z.; Chen, Y.; Wu, D.; Cui, J. Brainstorming-based ant colony optimization for vehicle routing with soft time windows. IEEE Access 2019, 7, 19643–19652. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, F.; Weng, X. An evolutionary scatter search particle swarm optimization algorithm for the vehicle routing problem with time windows. IEEE Access 2018, 6, 63468–63485. [Google Scholar] [CrossRef]
- Li, J.; Jing, X.; Tong, C. Modelling and Simulation of VRP in Wartime Using NSGA II. In Proceedings of the 2012 24th Chinese Control and Decision Conference (CCDC), Taiyuan, China, 23–25 May 2012. [Google Scholar]
- Mandal, S.K.; Pacciarelli, D.; Lokketangen, A.; Hasle, G. A memetic NSGA-II for the bi-objective mixed capacitated general routing problem. J. Heuristics 2015, 21, 359–390. [Google Scholar] [CrossRef]
- Psychas, I.D.; Marinaki, M.; Marinakis, Y. A Parallel Multi-Start NSGA II Algorithm for Multi-objective Energy Reduction Vehicle Routing Problem. In Evolutionary Multi-Criterion Optimization. EMO 2015; Gaspar-Cunha, A., Henggeler Antunes, C., Coello, C., Eds.; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2015; pp. 336–350. [Google Scholar]
- Zhao, P.X.; Luo, W.H.; Han, X. Time-dependent and bi-objective vehicle routing problem with time windows. Adv. Prod. Eng. Manag. 2019, 14, 201–212. [Google Scholar] [CrossRef]
- Xu, Z.; Elomri, A.; Pokharel, S.; Mutlu, F. A model for capacitated green vehicle routing problem with the time-varying vehicle speed and soft time windows. Comput. Ind. Eng. 2019, 137, 106011. [Google Scholar] [CrossRef]
- Jemai, J.; Zekri, M.; Mellouli, K. An NSGA-II Algorithm for the Green Vehicle Routing Problem. In Evolutionary Computation in Combinatorial Optimization; Hao, J.K., Middendorf, M., Eds.; EvoCOP 2012. Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7245. [Google Scholar]
- Wang, Y.; Zhang, S.; Assogba, K.; Fan, J.; Xu, M.; Wang, Y. Economic and environmental evaluations in the two-echelon collaborative multiple centres vehicle routing optimization. J. Clean Prod. 2018, 197, 443–461. [Google Scholar] [CrossRef]
- Rabbani, M.; Heidari, R.; Yazdanparast, R. A stochastic multi-period industrial hazardous waste location-routing problem: Integrating NSGA-II and Monte Carlo simulation. Eur. J. Oper. Res. 2019, 272, 945–961. [Google Scholar] [CrossRef]
- Zhang, Y.; Yuan, C.; Wu, J. Vehicle Routing Optimization of Instant Distribution Routing Based on Customer Satisfaction. Information 2020, 11, 36. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Wang, X.; Liu, X.; Yu, J. A Bi-Objective Vehicle-Routing Problem with Soft Time Windows and Multiple Depots to Minimize the Total Energy Consumption and Customer Dissatisfaction. Sustainability 2018, 10, 4257. [Google Scholar] [CrossRef] [Green Version]
- Song, M.; Li, J.Q.; Han, Y.; Han, Y.; Liu, L.; Sun, Q. Metaheuristics for solving the vehicle routing problem with the time windows and energy consumption in cold chain logistics. Appl. Soft Comput. 2020, 90, 106561. [Google Scholar] [CrossRef]
- Ait Haddadene, S.R.; Labadie, N.; Prodhon, C. Bicriteria Vehicle Routing Problem with Preferences and Timing Constraints in Home Health Care Services. Algorithms 2019, 12, 152. [Google Scholar] [CrossRef] [Green Version]
- NEO Research Group. Available online: https://neo.lcc.uma.es/vrp/ (accessed on 15 August 2021).
- Abbasi, M.; Rafiee, M.; Khosravi, M.R.; Jolfaei, A.; Menon, V.G.; Koushyar, J.M. An efficient parallel genetic algorithm solution for vehicle routing problem in cloud implementation of the intelligent transportation systems. J. Cloud Comp. 2020, 9, 6. [Google Scholar] [CrossRef]
- Chen, R.; Yang, B.; Li, S.; Wang, S. A self-learning genetic algorithm based on reinforcement learning for flexible job-shop scheduling problem. Comput. Ind. Eng. 2020, 149, 106778. [Google Scholar] [CrossRef]
- Raza, S.M.; Sajid, M.; Singh, J. Vehicle Routing Problem using Reinforcement Learning: Recent Advancements. Lecture Notes in Electrical Engineering. In Proceedings of the 3rd International Conference on Machine Intelligence and Signal Processing, Itanagar, India, 23–25 September 2021; NIT: Arunachal Pradesh, India, 2021; pp. 23–27. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Set | Total Instances | Minimum Demand | Maximum Demand | Distance of Nearest Customer from Central Depot | Distance of Farthest Customer from Central Depot |
|---|---|---|---|---|---|
| A | 27 | 1 | 72 | 2.0 | 125.88 |
| B | 23 | 1 | 69 | 6.33 | 116.85 |
| P | 24 | 1 | 2500 | 2.24 | 49.92 |
| E | 11 | 1 | 4100 | 2.24 | 118.87 |
| F | 3 | 1 | 21,611 | 0.0 | 146.77 |
| Parameter | Values |
|---|---|
| CVRP Instances | 88 |
| Size of population | 200 |
| Generations | 200 |
| Probability range for crossover | 0.4–0.9 |
| Probability for mutation | 0.1–0.3 |
| Experiments for each CVRP instance | 10 |
| Objective Values Chosen | Best |
| Vehicle Routes Chosen | Best |
| CVRP INSTANCES | BKS by Single Optimization Method (Total Distance) | NSGA-II_EAX | NSGA-II_GTBCX | NSGA-II_NNX | |||
|---|---|---|---|---|---|---|---|
| Total Distance | Longest Route | Total Distance | Longest Route | Total Distance | Longest Route | ||
| A-n32-k5 | 784 | 881 | 234 | 787 | 212 | 827 | 226 |
| A-n33-k5 | 661 | 719 | 173 | 669 | 157 | 674 | 167 |
| A-n33-k6 | 742 | 825 | 174 | 743 | 152 | 771 | 158 |
| A-n34-k5 | 778 | 891 | 194 | 782 | 173 | 802 | 178 |
| A-n36-k5 | 799 | 951 | 230 | 818 | 214 | 853 | 220 |
| A-n37-k5 | 669 | 833 | 194 | 676 | 180 | 737 | 185 |
| A-n37-k6 | 949 | 1105 | 228 | 963 | 208 | 975 | 211 |
| A-n38-k5 | 730 | 846 | 183 | 737 | 162 | 756 | 163 |
| A-n39-k5 | 822 | 1051 | 225 | 839 | 192 | 877 | 201 |
| A-n39-k6 | 831 | 956 | 200 | 846 | 183 | 870 | 195 |
| A-n44-k6 | 937 | 1169 | 222 | 949 | 201 | 986 | 203 |
| A-n45-k6 | 944 | 1212 | 214 | 952 | 195 | 992 | 194 |
| A-n45-k7 | 1146 | 1456 | 231 | 1158 | 205 | 1194 | 211 |
| A-n46-k7 | 914 | 1178 | 203 | 943 | 184 | 1004 | 184 |
| A-n48-k7 | 1073 | 1431 | 243 | 1074 | 204 | 1144 | 210 |
| A-n53-k7 | 1010 | 1484 | 235 | 1022 | 197 | 1078 | 199 |
| A-n54-k7 | 1167 | 1705 | 265 | 1291 | 199 | 1253 | 214 |
| A-n55-k9 | 1073 | 1455 | 188 | 1082 | 170 | 1120 | 168 |
| A-n60-k9 | 1354 | 1787 | 238 | 1393 | 222 | 1458 | 222 |
| A-n61-k9 | 1034 | 1489 | 185 | 1043 | 149 | 1119 | 153 |
| A-n62-k8 | 1288 | 1887 | 269 | 1305 | 216 | 1381 | 223 |
| A-n63-k9 | 1616 | 2242 | 269 | 1630 | 246 | 1722 | 243 |
| A-n63-k10 | 1314 | 1782 | 225 | 1330 | 189 | 1420 | 187 |
| A-n64-k9 | 1401 | 1978 | 260 | 1429 | 221 | 1509 | 223 |
| A-n65-k9 | 1174 | 1813 | 221 | 1199 | 177 | 1237 | 170 |
| A-n69-k9 | 1159 | 1845 | 227 | 1185 | 153 | 1251 | 163 |
| A-n80-k10 | 1763 | 2541 | 309 | 1799 | 245 | 1833 | 260 |
| CVRP INSTANCES | BKS by Single Optimization Method (Total Distance) | NSGA-II_EAX | NSGA-II_GTBCX | NSGA-II_NNX | |||
|---|---|---|---|---|---|---|---|
| Total Distance | Longest Route | Total Distance | Longest Route | Total Distance | Longest Route | ||
| B-n31-k5 | 672 | 717 | 190 | 676 | 190 | 683 | 190 |
| B-n34-k5 | 788 | 843 | 184 | 790 | 157 | 798 | 165 |
| B-n35-k5 | 955 | 1020 | 251 | 962 | 234 | 989 | 234 |
| B-n38-k6 | 805 | 884 | 178 | 812 | 177 | 828 | 179 |
| B-n39-k5 | 549 | 650 | 197 | 557 | 191 | 565 | 192 |
| B-n41-k6 | 829 | 950 | 180 | 838 | 169 | 846 | 168 |
| B-n43-k6 | 742 | 860 | 178 | 747 | 166 | 768 | 158 |
| B-n44-k7 | 909 | 1060 | 177 | 923 | 168 | 934 | 172 |
| B-n45-k5 | 751 | 916 | 219 | 754 | 174 | 788 | 174 |
| B-n45-k6 | 678 | 810 | 157 | 688 | 135 | 729 | 135 |
| B-n50-k7 | 741 | 945 | 182 | 745 | 140 | 790 | 147 |
| B-n50-k8 | 1312 | 1508 | 230 | 1321 | 224 | 1364 | 226 |
| B-n51-k7 | 1032 (1016) | 1243 | 202 | 1034 | 165 | 1039 | 152 |
| B-n52-k7 | 747 | 1016 | 186 | 751 | 160 | 777 | 158 |
| B-n56-k7 | 707 | 958 | 190 | 718 | 183 | 743 | 183 |
| B-n57-k7 | 1153 (1140) | 1529 | 222 | 1152 | 196 | 1194 | 198 |
| B-n57-k9 | 1598 | 1864 | 237 | 1612 | 224 | 1666 | 224 |
| B-n63-k10 | 1496 | 2059 | 250 | 1507 | 217 | 1592 | 221 |
| B-n64-k9 | 861 | 1203 | 173 | 871 | 152 | 936 | 152 |
| B-n66-k9 | 1316 | 1799 | 239 | 1352 | 208 | 1368 | 209 |
| B-n67-k10 | 1032 | 1417 | 200 | 1049 | 196 | 1102 | 184 |
| B-n68-k9 | 1272 | 1714 | 226 | 1288 | 189 | 1324 | 189 |
| B-n78-k10 | 1221 | 1884 | 234 | 1243 | 190 | 1304 | 190 |
| CVRP INSTANCES | BKS by Single Optimization Method (Total Distance) | NSGA-II_EAX | NSGA-II_GTBCX | NSGA-II_NNX | |||
|---|---|---|---|---|---|---|---|
| Total Distance | Longest Route | Total Distance | Longest Route | Total Distance | Longest Route | ||
| P-n16-k8 | 450 | 451 | 65 | 451 | 65 | 451 | 65 |
| P-n19-k2 | 212 | 212 | 106 | 212 | 106 | 212 | 106 |
| P-n20-k2 | 216 | 220 | 99 | 217 | 109 | 217 | 99 |
| P-n21-k2 | 211 | 216 | 113 | 212 | 113 | 216 | 113 |
| P-n22-k2 | 216 | 219 | 118 | 217 | 103 | 221 | 118 |
| P-n22-k8 | 603 (590) | 598 | 99 | 589 | 99 | 592 | 99 |
| P-n23-k8 | 529 | 531 | 88 | 531 | 88 | 541 | 88 |
| P-n40-k5 | 458 | 534 | 121 | 463 | 99 | 491 | 105 |
| P-n45-k5 | 510 | 677 | 149 | 520 | 111 | 564 | 122 |
| P-n50-k7 | 554 | 708 | 121 | 580 | 91 | 600 | 101 |
| P-n50-k8 | 631 | 839 | 116 | 639 | 85 | 669 | 91 |
| P-n50-k10 | 696 | 892 | 103 | 706 | 81 | 738 | 87 |
| P-n51-k10 | 741 | 952 | 106 | 762 | 89 | 795 | 92 |
| P-n55-k7 | 568 | 796 | 134 | 579 | 99 | 606 | 105 |
| P-n55-k8 | 576 | 790 | 120 | 590 | 98 | 623 | 103 |
| P-n55-k10 | 694 | 921 | 102 | 724 | 86 | 723 | 89 |
| P-n55-k15 | 856 | 1157 | 86 | 956 | 77 | 971 | 77 |
| P-n60-k10 | 744 | 1080 | 117 | 755 | 89 | 812 | 100 |
| P-n60-k15 | 968 | 1195 | 98 | 992 | 85 | 1035 | 85 |
| P-n65-k10 | 792 | 1223 | 135 | 821 | 94 | 874 | 105 |
| P-n70-k10 | 827 | 1202 | 135 | 870 | 100 | 930 | 107 |
| P-n76-k4 | 593 | 1025 | 273 | 623 | 160 | 656 | 176 |
| P-n76-k5 | 627 | 1147 | 240 | 653 | 137 | 694 | 168 |
| P-n101-k4 | 681 | 1317 | 349 | 770 | 199 | 803 | 213 |
| CVRP INSTANCES | BKS by Single Optimization Method (Total Distance) | NSGA-II_EAX | NSGA-II_GTBCX | NSGA-II_NNX | |||
|---|---|---|---|---|---|---|---|
| Total Distance | Longest Route | Total Distance | Longest Route | Total Distance | Longest Route | ||
| E-n22-k4 | 375 | 377 | 105 | 375 | 102 | 377 | 105 |
| E-n23-k3 | 569 | 575 | 253 | 569 | 247 | 580 | 242 |
| E-n30-k3 | 534 (503) | 558 | 178 | 511 | 166 | 547 | 175 |
| E-n33-k4 | 835 | 974 | 259 | 844 | 246 | 860 | 247 |
| E-n51-k5 | 521 | 754 | 157 | 524 | 113 | 584 | 124 |
| E-n76-k7 | 682 | 1149 | 186 | 740 | 120 | 781 | 134 |
| E-n76-k8 | 735 | 1212 | 166 | 765 | 110 | 824 | 121 |
| E-n76-k10 | 830 | 1323 | 143 | 876 | 96 | 939 | 106 |
| E-n76-k14 | 1021 | 1530 | 131 | 1056 | 93 | 1132 | 96 |
| E-n101-k8 | 815 | 1591 | 230 | 943 | 145 | 960 | 146 |
| E-n101-k14 | 1071 | 1870 | 163 | 1204 | 110 | 1261 | 113 |
| CVRP INSTANCES | BKS by Single Optimization Method (Total Distance) | NSGA-II_EAX | NSGA-II_GTBCX | NSGA-II_NNX | |||
|---|---|---|---|---|---|---|---|
| Total Distance | Longest Route | Total Distance | Longest Route | Total Distance | Longest Route | ||
| F-n45-k4 | 724 | 976 | 261 | 728 | 259 | 774 | 259 |
| F-n72-k4 | 237 | 429 | 100 | 245 | 66 | 275 | 71 |
| F-n135-k7 | 1165 | 1308 | 299 | 1182 | 306 | 2712 | 413 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sajid, M.; Singh, J.; Haidri, R.A.; Prasad, M.; Varadarajan, V.; Kotecha, K.; Garg, D. A Novel Algorithm for Capacitated Vehicle Routing Problem for Smart Cities. Symmetry 2021, 13, 1923. https://doi.org/10.3390/sym13101923
Sajid M, Singh J, Haidri RA, Prasad M, Varadarajan V, Kotecha K, Garg D. A Novel Algorithm for Capacitated Vehicle Routing Problem for Smart Cities. Symmetry. 2021; 13(10):1923. https://doi.org/10.3390/sym13101923
Chicago/Turabian StyleSajid, Mohammad, Jagendra Singh, Raza Abbas Haidri, Mukesh Prasad, Vijayakumar Varadarajan, Ketan Kotecha, and Deepak Garg. 2021. "A Novel Algorithm for Capacitated Vehicle Routing Problem for Smart Cities" Symmetry 13, no. 10: 1923. https://doi.org/10.3390/sym13101923
APA StyleSajid, M., Singh, J., Haidri, R. A., Prasad, M., Varadarajan, V., Kotecha, K., & Garg, D. (2021). A Novel Algorithm for Capacitated Vehicle Routing Problem for Smart Cities. Symmetry, 13(10), 1923. https://doi.org/10.3390/sym13101923