Influence of Time Delay on Controlling the Non-Linear Oscillations of a Rotating Blade



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The Amplitudes and Phases Equations of the Blade and Controller
3. Results and Discussion
3.1. Relation between the Parameters and the Steady-State Amplitudes
3.2. Time Response and Phase Plane
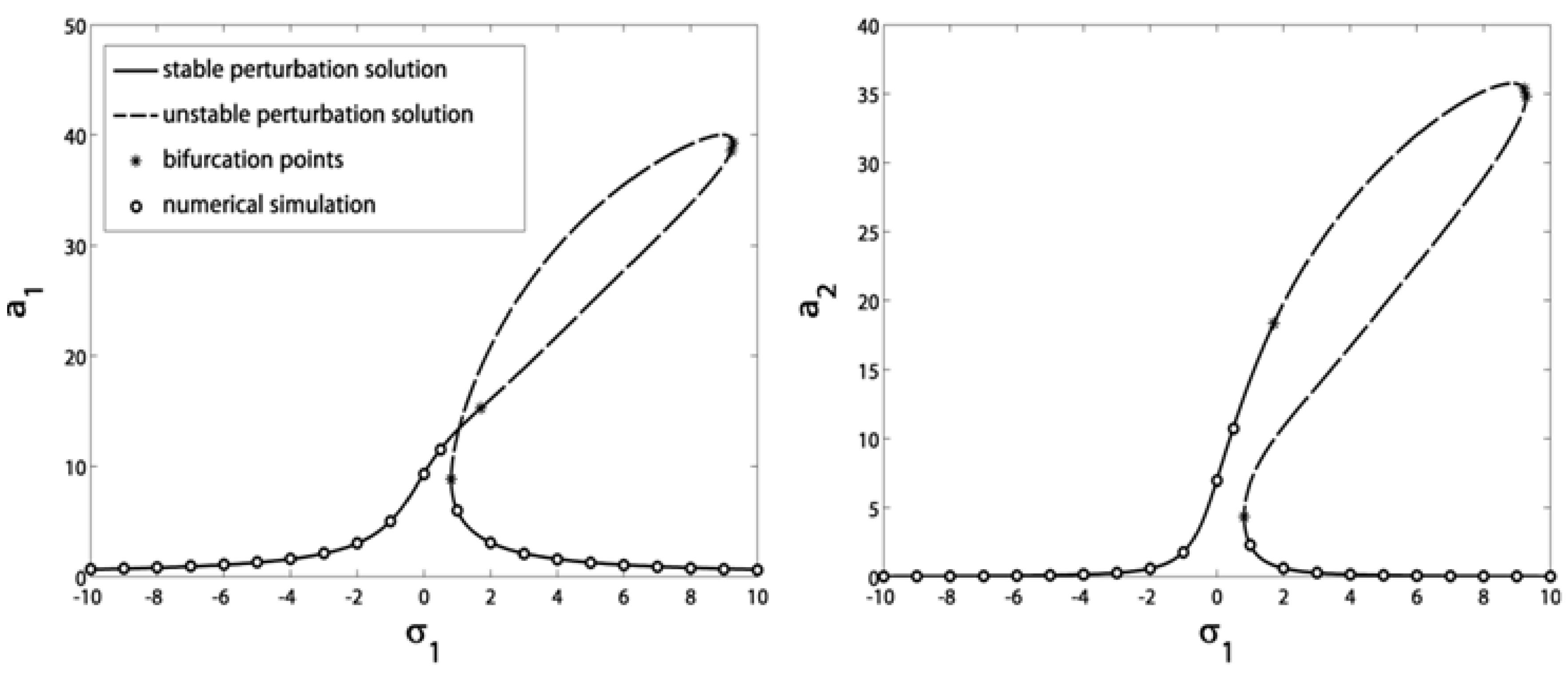
3.3. Verification of the Analytical Solutions
4. Conclusions
- The time delays constraint τ1 + τ2 < 0.0039 is a safe guarantee for stable blade vibrations after control.
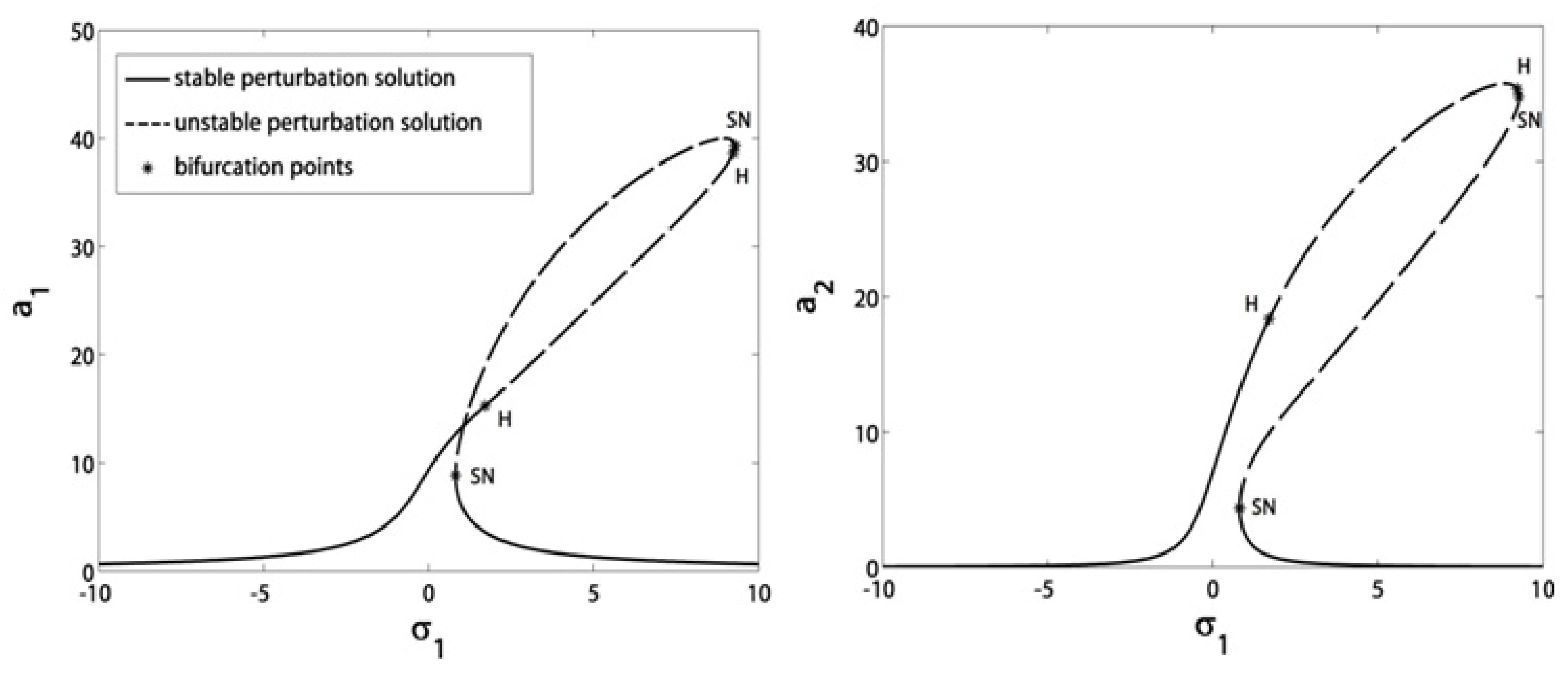
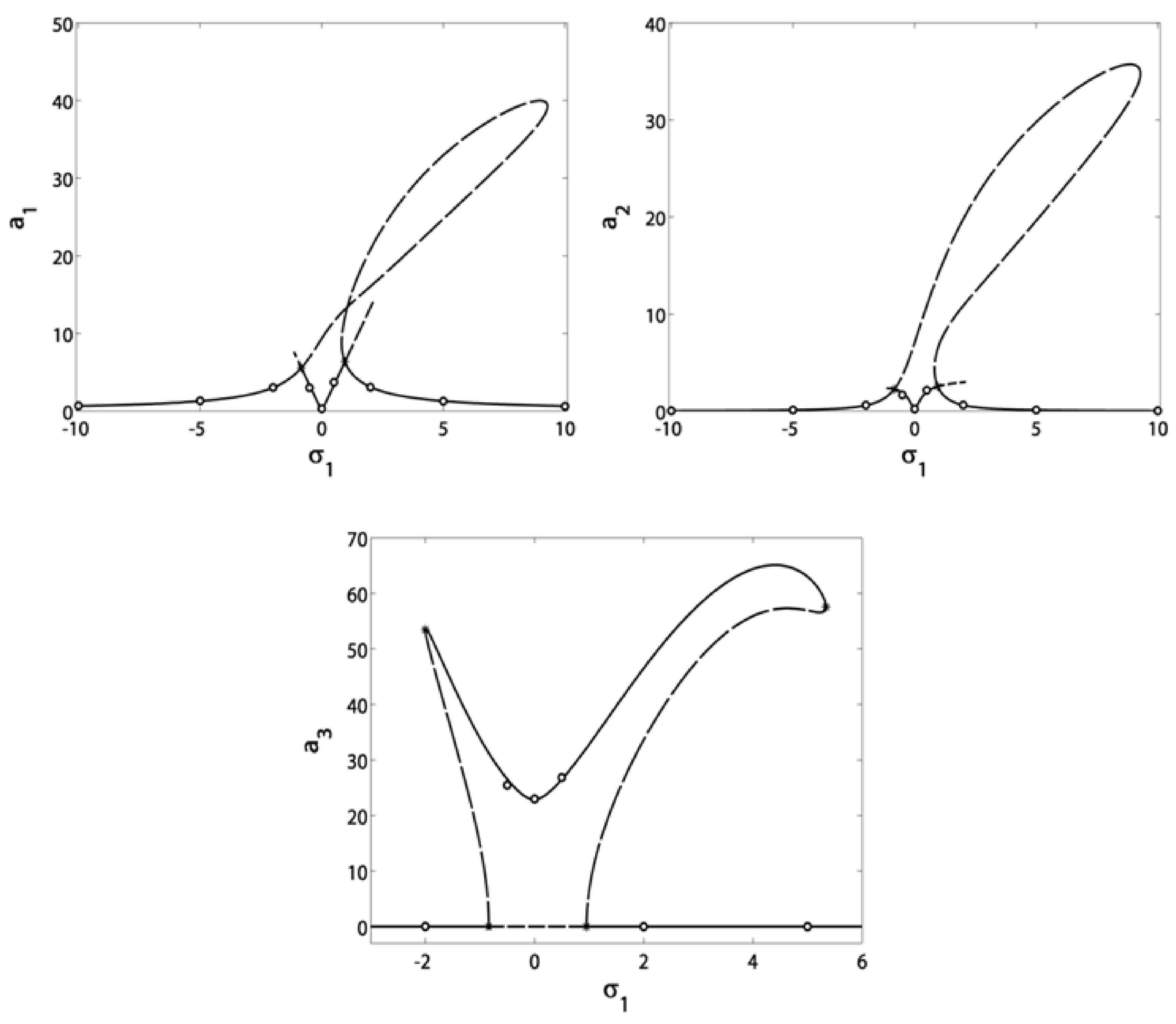
- The bifurcation points (SN and H), that were present before control, were eliminated after control.
- After control, the bifurcation points (PF) have appeared to switch the blade speed response to a V-shaped curve, making it reach a minimum value at σ1 = 0.
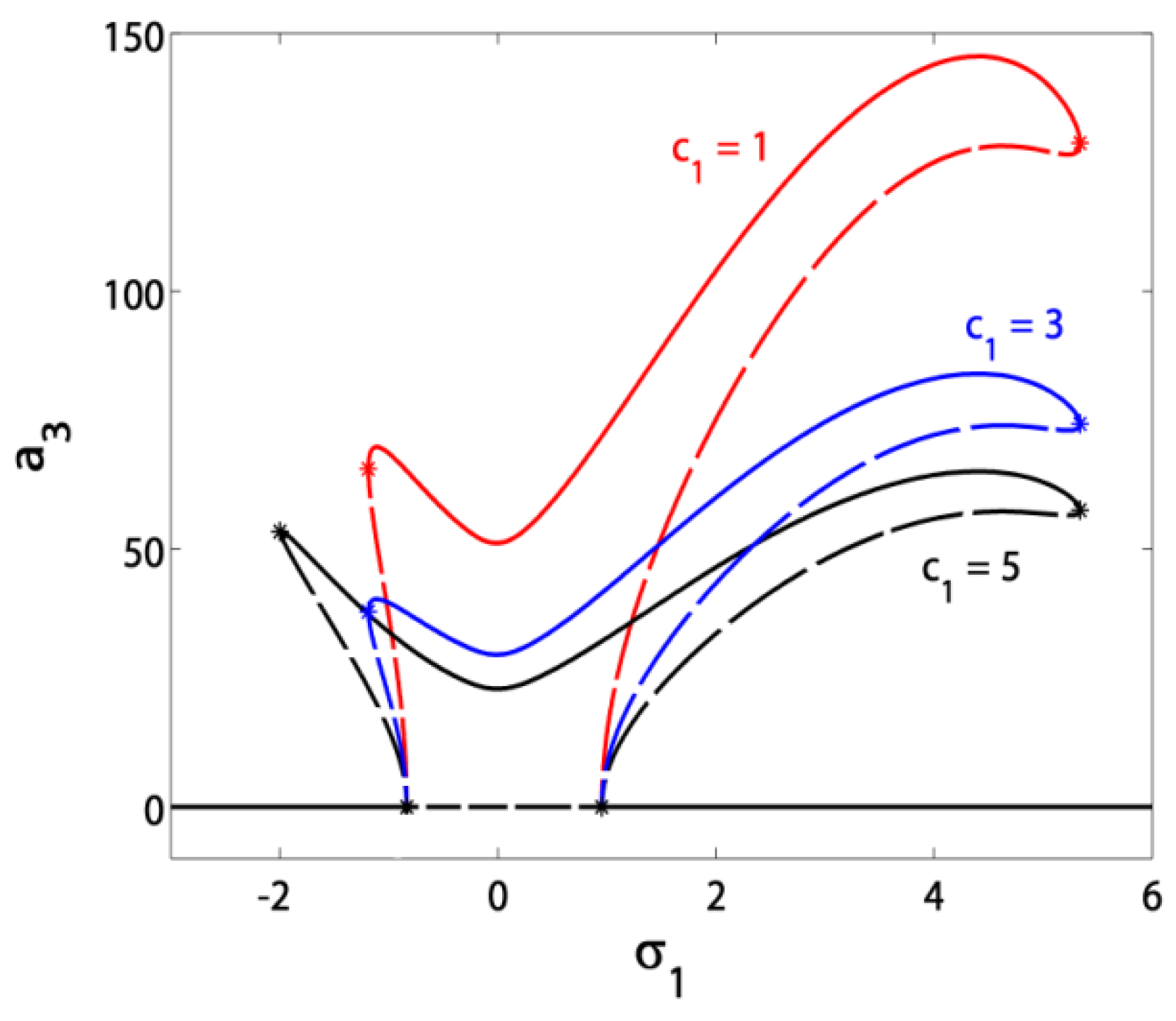
- The control gain c1 affected only the controller without any extra effects on the blade amplitudes.
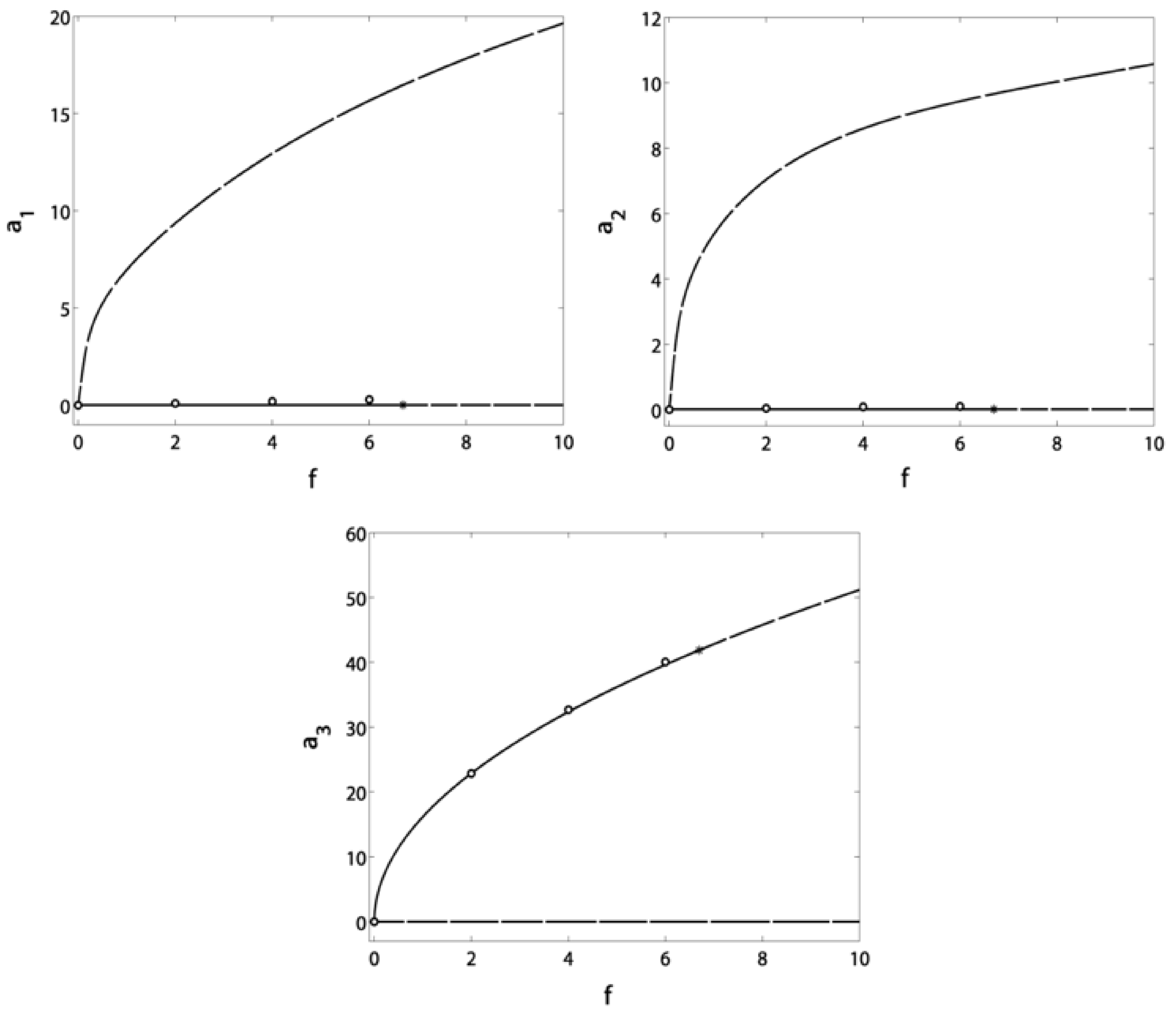
- The blade vibrations were saturated at zero level due to the saturation phenomenon, while vibration energy was channeled to the controller.
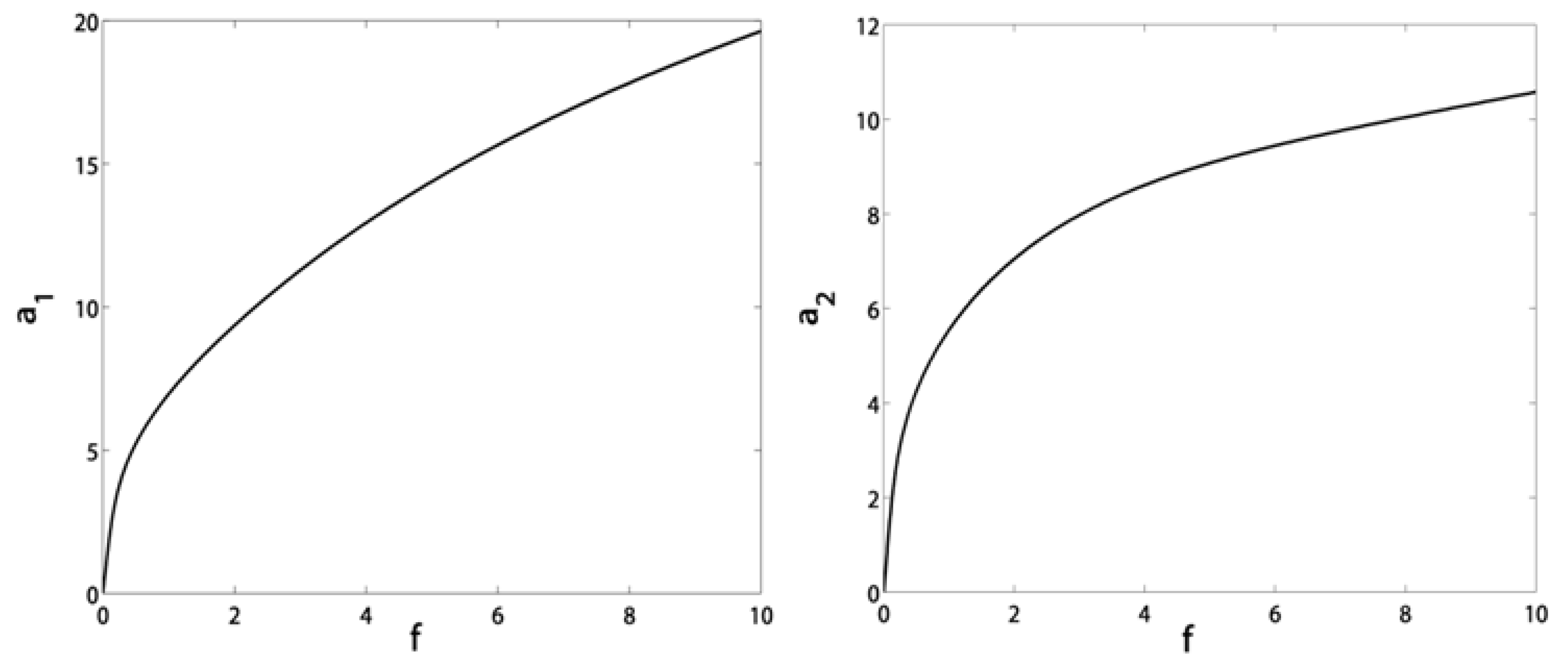
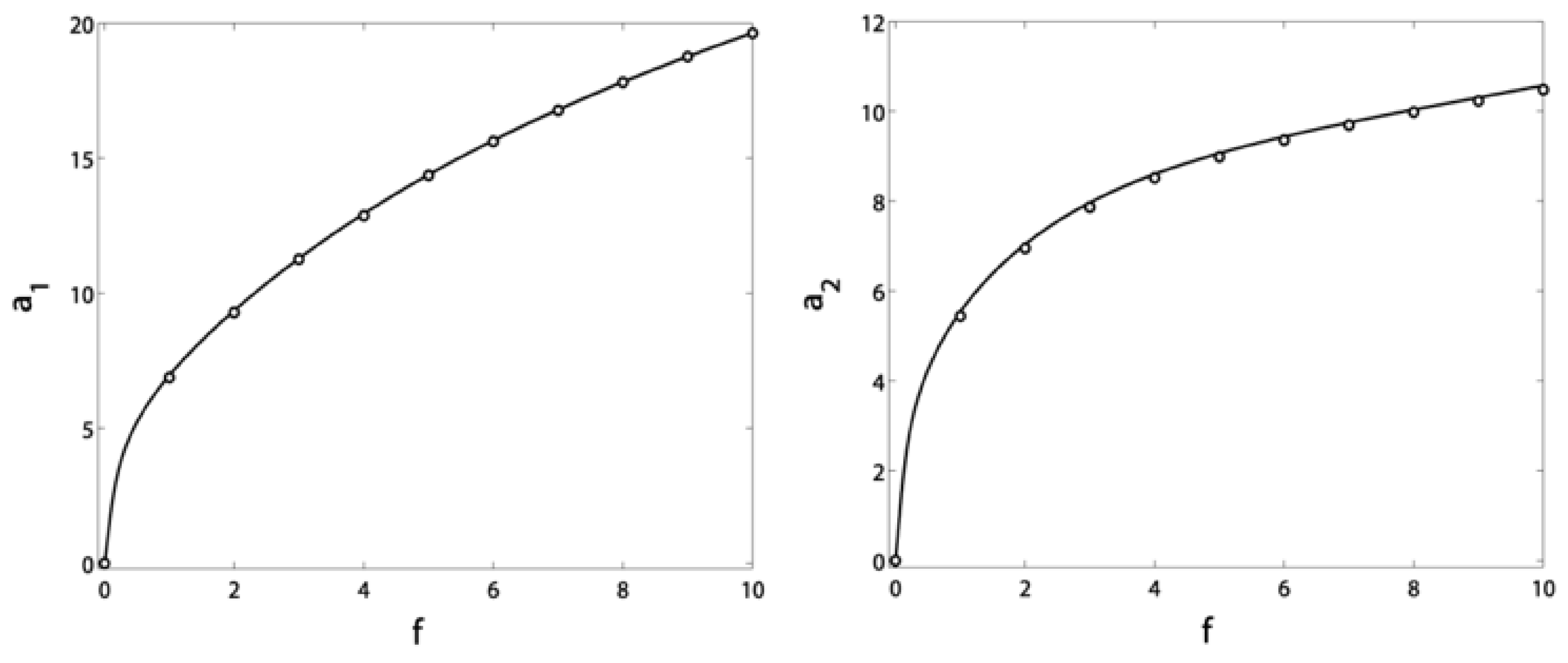
- The existence of the time delay diminished the excitation force’s stable range to make it not exceed a critical value; otherwise, the blade would pass through H point and exhibit unstable motions.
- This encourages us to suggest that the reduction ratio (with safe time delays) has decreased slightly where it cannot be noticed.
- Safe time delay occurrence has slightly reduced the vibration reduction ratio from about 97% to about 96% where it could not be noticed.
- The blade and controller exhibited multi-limit cycles as long as the time delays have passed the border line τ1 + τ2 = 0.0039.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Yao, M.; Chen, Y.P.; Zhang, W. Nonlinear vibrations of blade with varying rotating speed. Nonlinear Dyn. 2012, 68, 487–504. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, W. Stability analysis of a nonlinear rotating blade with torsional vibrations. J. Sound Vib. 2012, 331, 5755–5773. [Google Scholar] [CrossRef]
- Yao, M.; Zhang, W.; Chen, Y.P. Analysis on nonlinear oscillations and resonant responses of a compressor blade. Acta Mech. 2014, 225, 3483–3510. [Google Scholar] [CrossRef]
- Sina, S.; Haddadpour, H. Axial–torsional vibrations of rotating pretwisted thin walled composite beams. Int. J. Mech. Sci. 2014, 80, 93–101. [Google Scholar] [CrossRef]
- Wang, F.; Qu, Y. Period Doubling Motions of a Nonlinear Rotating Beam at 1:1 Resonance. Int. J. Bifurc. Chaos 2014, 24, 1450159. [Google Scholar] [CrossRef]
- Pešek, L.; Hajžman, M.; Ust, L.P.; Zeman, V.; Byrtus, M.; Brůha, J. Experimental and numerical investigation of friction element dissipative effects in blade shrouding. Nonlinear Dyn. 2014, 79, 1711–1726. [Google Scholar] [CrossRef]
- Hamed, Y.S.; Amer, Y.A. Nonlinear saturation controller for vibration supersession of a nonlinear composite beam. J. Mech. Sci. Technol. 2014, 28, 2987–3002. [Google Scholar] [CrossRef]
- Bian, X.; Chen, F.; An, F. Global Dynamics of a Compressor Blade with Resonances. Math. Probl. Eng. 2016, 2016, 3275750. [Google Scholar] [CrossRef]
- Kim, H.; Chung, J. Nonlinear modeling for dynamic analysis of a rotating cantilever beam. Nonlinear Dyn. 2016, 86, 1981–2002. [Google Scholar] [CrossRef]
- Li, X.; Hou, J.; Chen, J. An analytical method for Mathieu oscillator based on method of variation of parameter. Commun. Nonlinear Sci. Numer. Simul. 2016, 37, 326–353. [Google Scholar] [CrossRef]
- Luo, Z.; Wang, Y.; Zhai, J.; Zhu, Y. Accurate prediction approach of dynamic characteristics for a rotating thin walled annular plate considering the centrifugal stress requirement. J. Vibroeng. 2016, 18, 3104–3116. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, F.; Zhang, B.; Jing, T. Local bifurcation analysis of a rotating blade. Appl. Math. Model. 2016, 40, 4023–4031. [Google Scholar] [CrossRef]
- Zhao, T.-Y.; Yuan, H.-Q.; Li, B.-B.; Li, Z.-J.; Liu, L.-M. Analytical Solution for Rotational Rub-Impact Plate under Thermal Shock. J. Mech. 2016, 32, 297–311. [Google Scholar] [CrossRef]
- Asghari, M.; Hashemi, M. The couple stress-based nonlinear coupled three-dimensional vibration analysis of microspinning Rayleigh beams. Nonlinear Dyn. 2016, 87, 1315–1334. [Google Scholar] [CrossRef]
- Cao, D.-X.; Liu, B.; Yao, M.; Zhang, W. Free vibration analysis of a pre-twisted sandwich blade with thermal barrier coatings layers. Sci. China Ser. E Technol. Sci. 2017, 60, 1747–1761. [Google Scholar] [CrossRef]
- Kandil, A.; Eissa, M. Improvement of positive position feedback controller for suppressing compressor blade oscillations. Nonlinear Dyn. 2017, 90, 1727–1753. [Google Scholar] [CrossRef]
- Farsadi, T.; Rahmanian, M.; Kayran, A. Geometrically nonlinear aeroelastic behavior of pretwisted composite wings modeled as thin walled beams. J. Fluids Struct. 2018, 83, 259–292. [Google Scholar] [CrossRef]
- Kandil, A.; El-Gohary, H. Investigating the performance of a time delayed proportional–derivative controller for rotating blade vibrations. Nonlinear Dyn. 2018, 91, 2631–2649. [Google Scholar] [CrossRef]
- Kandil, A.; El-Gohary, H.A. Suppressing the nonlinear vibrations of a compressor blade via a nonlinear saturation controller. J. Vib. Control 2016, 24, 1488–1504. [Google Scholar] [CrossRef]
- Khaniki, H.B. Vibration analysis of rotating nanobeam systems using Eringen’s two-phase local/nonlocal model. Phys. E Low-Dimens. Syst. Nanostruct. 2018, 99, 310–319. [Google Scholar] [CrossRef]
- Li, C.; Shen, Z.; Zhong, B.; Wen, B. Study on the Nonlinear Characteristics of a Rotating Flexible Blade with Dovetail Interface Feature. Shock. Vib. 2018, 2018, 4923898. [Google Scholar] [CrossRef]
- Yao, M.; Ma, L.; Zhang, W. Nonlinear Dynamics of the High-Speed Rotating Plate. Int. J. Aerosp. Eng. 2018, 2018, 1–23. [Google Scholar] [CrossRef]
- Gu, X.; Hao, Y.; Zhang, W.; Liu, L.; Chen, J. Free vibration of rotating cantilever pre-twisted panel with initial exponential function type geometric imperfection. Appl. Math. Model. 2019, 68, 327–352. [Google Scholar] [CrossRef]
- Heidari, M.; Arvin, H. Nonlinear free vibration analysis of functionally graded rotating composite Timoshenko beams reinforced by carbon nanotubes. J. Vib. Control 2019, 25, 2063–2078. [Google Scholar] [CrossRef]
- Niu, Y.; Zhang, W.; Guo, X.-Y. Free vibration of rotating pretwisted functionally graded composite cylindrical panel reinforced with graphene platelets. Eur. J. Mech. A/Solids 2019, 77, 103798. [Google Scholar] [CrossRef]
- Umerc, M.; Botto, D. Measurement of contact parameters on under-platform dampers coupled with blade dynamics. Int. J. Mech. Sci. 2019, 159, 450–458. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, W.; Mao, J. Nonlinear vibrations of carbon fiber reinforced polymer laminated cylindrical shell under non-normal boundary conditions with 1:2 internal resonance. Eur. J. Mech. A/Solids 2019, 74, 317–336. [Google Scholar] [CrossRef]
- Yao, M.; Niu, Y.; Hao, Y. Nonlinear dynamic responses of rotating pretwisted cylindrical shells. Nonlinear Dyn. 2019, 95, 151–174. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, Y.-L.; Yang, X.-D.; Chen, L.-Q. Saturation and stability in internal resonance of a rotating blade under thermal gradient. J. Sound Vib. 2019, 440, 34–50. [Google Scholar] [CrossRef]
- Khosravi, S.; Arvin, H.; Kiani, Y. Vibration analysis of rotating composite beams reinforced with carbon nanotubes in thermal environment. Int. J. Mech. Sci. 2019, 164, 105187. [Google Scholar] [CrossRef]
- Han, H.; Liu, L.; Cao, D. Dynamic modeling for rotating composite Timoshenko beam and analysis on its bending-torsion coupled vibration. Appl. Math. Model. 2020, 78, 773–791. [Google Scholar] [CrossRef]
- Hamed, Y.; Albogamy, K.; Sayed, M. Nonlinear vibrations control of a contact-mode AFM model via a time-delayed positive position feedback. Alex. Eng. J. 2021, 60, 963–977. [Google Scholar] [CrossRef]
- Hamed, Y.S.; Albogamy, K.M.; Sayed, M. A proportional derivative (PD) controller for suppression the vibrations of the a contact-mode AFM model. IEEE Access 2020, 8, 214061–214070. [Google Scholar] [CrossRef]
- He, J.-H. Homotopy perturbation technique. Comput. Methods Appl. Mech. Eng. 1999, 178, 257–262. [Google Scholar] [CrossRef]
- He, J.-H. A coupling method of a homotopy technique and a perturbation technique for non-linear problems. Int. J. Non-Linear Mech. 2000, 35, 37–43. [Google Scholar] [CrossRef]
- He, J.-H. Homotopy perturbation method: A new nonlinear analytical technique. Appl. Math. Comput. 2003, 135, 73–79. [Google Scholar] [CrossRef]
- Noeiaghdam, S.; Dreglea, A.; He, J.-H.; Avazzadeh, Z.; Suleman, M.; Araghi, M.A.F.; Sidorov, D.; Sidorov, N.A. Error Estimation of the Homotopy Perturbation Method to Solve Second Kind Volterra Integral Equations with Piecewise Smooth Kernels: Application of the CADNA Library. Symmetry 2020, 12, 1730. [Google Scholar] [CrossRef]
- Hussain, S.; Shah, A.; Ayub, S.; Ullah, A. An approximate analytical solution of the Allen-Cahn equation using homotopy perturbation method and homotopy analysis method. Heliyon 2019, 5, e03060. [Google Scholar] [CrossRef]
- Javeed, S.; Baleanu, D.; Waheed, A.; Khan, M.S.; Affan, H. Analysis of Homotopy Perturbation Method for Solving Fractional Order Differential Equations. Mathematics 2019, 7, 40. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Mook, D.T. Nonlinear Oscillations; Wiley: New York, NY, USA, 1995. [Google Scholar] [CrossRef]


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hamed, Y.S.; Kandil, A. Influence of Time Delay on Controlling the Non-Linear Oscillations of a Rotating Blade. Symmetry 2021, 13, 85. https://doi.org/10.3390/sym13010085
Hamed YS, Kandil A. Influence of Time Delay on Controlling the Non-Linear Oscillations of a Rotating Blade. Symmetry. 2021; 13(1):85. https://doi.org/10.3390/sym13010085
Chicago/Turabian StyleHamed, Yasser Salah, and Ali Kandil. 2021. "Influence of Time Delay on Controlling the Non-Linear Oscillations of a Rotating Blade" Symmetry 13, no. 1: 85. https://doi.org/10.3390/sym13010085
APA StyleHamed, Y. S., & Kandil, A. (2021). Influence of Time Delay on Controlling the Non-Linear Oscillations of a Rotating Blade. Symmetry, 13(1), 85. https://doi.org/10.3390/sym13010085