Abstract
Recently, the rapid development of mobile devices and communication technologies has dramatically increased the demand for location-based services that provide users with location-oriented information and services. User location in outdoor spaces is measured with high accuracy using GPS. However, because the indoor reception of GPS signals is not smooth, this solution is not viable in indoor spaces. Many on-going studies are exploring new approaches for indoor location measurement. One popular technique involves using the received signal strength indicator (RSSI) values from the Bluetooth Low Energy (BLE) beacons to measure the distance between a mobile device and the beacons and then determining the position of the user in an indoor space by applying a positioning algorithm such as the trilateration method. However, it remains difficult to obtain accurate data because RSSI values are unstable owing to the influence of elements in the surrounding environment such as weather, humidity, physical barriers, and interference from other signals. In this paper, we propose an indoor location tracking system that improves performance by correcting unstable RSSI signals received from BLE beacons. We apply a filter algorithm based on the average filter and the Kalman filter to reduce the error range of results calculated using the RSSI values.
1. Introduction
With the development of information and communication technology due to the Fourth Industrial Revolution, the time and space restrictions on access to information are disappearing. Any device with Internet access grant the user access any desired information, regardless of time or place. Recently, technologies are being developed that predict and provide information that the user needs in accordance with the current situation or condition of the user before user finds information. As part of this research, location-based services (LBS) have emerged that provide information based on user’s location.
An LBS collects user location information through a communication network or Internet of things (IoT) equipment, and provides users with specific information and services such as traffic, weather, and nearby landmarks or events, based on the collected location information. Due to factors such as the evolution of smartphones, the proliferation of high-speed telecommunications network infrastructure, real-time location tracking services, and increased demand for related products and services such as location-based advertising and marketing for customers, the LBS market is currently experiencing rapid growth [1,2]. Recently, the importance of indoor space has been emphasized as most activities such as business, entertainment, and shopping are performed in the indoor space. As a result, various types of location-based services provided for indoor space have also started to attract attention. The core technology of LBS is localization technology that tracks the user’s location. There are various kinds of positioning technologies. Among these, Global Navigation Satellite System (GNSS) such as GPS is generally used as positioning technology of LBS [3].
Although GPS shows good performance in the outdoor space, it is difficult to trace the user’s location in the indoor space using the GPS because the reception of signals is not smooth in the indoor spaces. Therefore, various indoor positioning technologies to replace GPS are currently being researched and developed. One prevalent approach to indoor positioning technology is to install devices that transmit signals using Bluetooth, sound waves, etc., in an indoor space, and then calculate user position based on the signals received by their wireless and mobile devices such as Wi-Fi receivers and smart phones. In contrast, a different method measures user position using hardware that is built into users’ devices. The former approach is capable of receiving more stable position information, but comes with costs of additional equipment and the installation process. In the latter method, although no additional equipment is required and financial cost is reduced, the positioning stability and accuracy are low. Furthermore, the hardware can quickly consume the user’s device battery owing to the ongoing calculation processes. Among the indoor positioning techniques, there are methods using BLE (Bluetooth Low Energy) beacons. To measure a user’s position in an indoor space using a beacon, a plurality of beacons is installed in the area, and the distance between each beacon and a mobile device is measured based on the received signal strength indicator (RSSI) of the beacon. This method locates the user by applying a positioning algorithm, such as the triangulation method, under the assumption that the calculated distance between each beacon and mobile device is accurate. However, it is still difficult to accurately determine indoor position using RSSI because the signal is unstable owing to obstacles in measurement space, the surrounding environment, weather, humidity, and other signals. Thus, to achieve accurate indoor positioning, it is necessary to compensate for unstable RSSI. In this paper, we propose an improved indoor positioning system that measures user’s position in indoor space. For this purpose, we applied the appropriate filter algorithm based on the extended Kalman filter (EKF) to the unstable RSSI value to reduce the error range of the computed distance.
The contributions of this work are as follow.
- We reduced the error range of RSSI by applying filter algorithm based on EKF and average filter.
- We construct a system with enhanced security by applying ephemeral ID technology when identifying beacon.
This paper is organized in six sections. Section 2 reviews the related work and Section 3 describes the indoor positioning method using beacons. Section 4 presents the indoor positioning system, Section 5 shows the application of the filter algorithm and finally, the conclusions and future lines of work are presented in Section 6.
2. Related Work
2.1. Performance Improvement of Indoor Positioning System
Due to the increasing demand of indoor LBS, many researches on indoor localization technology have been conducted. Many of the proposed approaches utilize beacons for indoor location tracking.
Inoue et al. [4] proposed a positioning system for an indoor pedestrian navigation service that used mobile phones and BLE beacons in a server-free environment. Multiple beacons were installed at various points in the room and mobile devices collected RSSI broadcast by the beacons. After receiving the signal data from a beacon, the relative position of the user was estimated based on analysis that used the probability inference algorithm.
Lin et al. [5] proposed a mobile-based indoor location system that uses mobile applications as an iBeacon solution based on BLE technology to improve the efficiency of the emergency room. They collected the RSSI of the surrounding beacons and calibrated the RSSI by applying an average filter. Then, they repeatedly applied the average filter to RSSI, which was repeated many times, and found the nearest beacon and used it for the calculation.
Rida et al. [6] proposed an indoor positioning system based on the RSSIs of BLE technology. They installed a beacon on the ceiling of the indoor space and calculated the location of the user in the indoor space by applying a dilatation algorithm that is easy for any hardware to implement because of the algorithm’s low complexity.
Momose et al. [7] proposed an indoor positioning system that improved the accuracy of beacon distance measurement by applying a particle filter based on the space’s floor plan. By using the proximity of BLE beacons as well as acceleration and geomagnetic sensors to design algorithms.
Pelant et al. [8] created a Ray-Launching based simulation model to study the performance of BLE technology in indoor localization, where RSS fingerprinting map was created based on theoretical and measurements results; their results show that accuracy highly depends on the number of sectors in the environment and on the number of beacons considered.
Luo et al. [9] proposed a method of arranging robots in an indoor space using Wi-Fi and radio-frequency identification (RFID) fingerprinting. They collected Wi-Fi and RFID signals at multiple points in the room. The fingerprint of Wi-Fi was initially used to place educational robots (Erobs) in large areas and then direct the robot to a location close to the target location. The RFID fingerprint would then be used to direct the Erob to the target location.
Dong et al. [10] proposed a solution combining feature clustering and a wireless sensor network to increase the efficiency of robot position recognition in indoor spaces. They also integrated robotic position recognition with wireless sensor networks to improve robustness.
2.2. Google’s Eddystone
Eddystone is an open-source beacon format published by Google, and has open-source protocol specifications and development tools, making it easy to extend and operate on a variety of platforms.
Eddystone supports four frames. The first is the UID Frame. UID frame broadcasts a unique ID of the beacon. UID frame consists of 10 Byte namespace and instance of 6 Bytes. The namespace is used to distinguish groups of beacons, and the instance is used to identify each beacon in the same group [11].
The second is URL frame. URL frame is a frame that allows the user to directly use the existing contents in the physical web by advertising the URL. URL frame broadcasts a URL using a compressed encoding format in order to fit more within the limited advertisement packet. Once decoded, the URL can be used by any client with access to the internet [12].
The third is the TLM frame. TLM frame is a frame that transmits data that can monitor the beacon status, such as the beacon sensor, the battery, and the transmission status. TLM frame must be paired with a frame providing an identifier of UID or URL type because the packet does not contain a beacon identifier [13].
The last is the EID (ephemeral id) frame. The EID broadcasts a temporary identifier that changes periodically at a rate determined when it first registers with the web service. An EID can be resolved by a registered service, but appears to be randomly changed to other observers who are not registered. This frame type is used for security and privacy enhancement [14].
To generate an EID that can only be identified by registered users, three data are required. The first is identity key. The identity key is the value shared by beacon and the server resolving the ephemeral identity key. The second is rotation period exponent scalar. This value is a value that determines the period in which the temporary ID changes. This value has a value between 0 and 15. When this value is K, a new temporary ID is generated every 2^K s. The last is a 32-bit beacon-specific timestamp value.
Figure 1 shows the EID generation process. beacon and server each have a public key and a private key pair. First, when an EID registration request comes in, the server returns its public key, along with its supported rotation period exponents range. Then, beacon computes the ECDH shared secret by multiplying its secret key and server’s public key. Then, the shared secret is encrypted with the HKDF-256 algorithm, and the upper 16 bytes are cut out to generate the identity key.
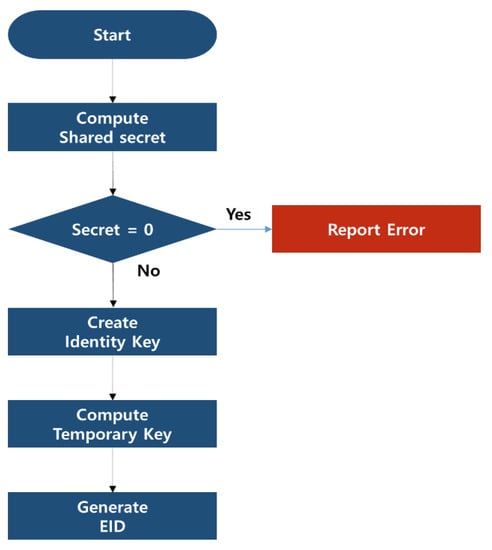
Figure 1.
Eddystone-EID generate process.
Then, the process of generating the temporary key using the identity key and finally the process of generating the EID are performed. Temporary key is generated by encrypting the data configured as Table 1 with AES-128 algorithm using the identity key as the encryption key. Then, the same procedure is repeated for the data as shown in Table 2, using the temporary key as the encryption key. EID is completed by taking the upper 8 bytes of the encryption result [15].

Table 1.
Structure of data for temporary key generation.
Table 2.
Structure of data for EID Generation.
3. Indoor Positioning Method Using Beacon
This section will describe how to measure the position in a room using beacons. To measure indoor location using beacons, a positioning algorithm, such as the trilateration method, is used. This means that three or more beacons must be installed in the measurement space.
As shown in Figure 2, the interior space can be represented on a two-dimensional plane. To apply trilateration, the location of each beacon and mobile device is indicated using (x, y) coordinates. Let the position coordinates of each beacon be (x1, y1), (x2, y2), (x3, y3) and the position of the mobile device be (a, b). At this time, the following set of equations is established:
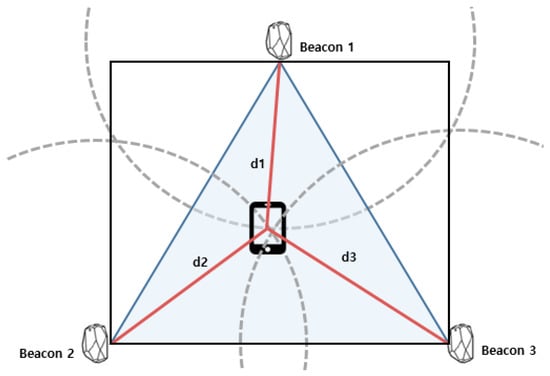
Figure 2.
Indoor location measurement using trilateration.
If all the values of the beacon position coordinates, (x1, y1), (x2, y2), (x3, y3), and the distances d1, d2, and d3 between the mobile device and the beacon are known, then, the mobile device position (a, b) can be obtained. Because the location coordinates of the beacon are known in advance and the distance between the beacon and the mobile device can be measured using the RSSI, the position of the mobile device in an indoor space can be determined and indicated on a two-dimensional plane [16].
The values of d1, d2 and d3, which are the distance between the beacons and the mobile device, must be accurate to determine the correct position of the mobile device in the indoor space using the trilateration method. The formula for calculating the distance between a beacon and the terminal using the RSSI is as follows:
where Tx power is the intensity at which a beacon transmits a signal and N is a correction constant with a value associated with propagation loss. Because the Tx power and N value are constant, the value of the distance d calculated according to the RSSI changes. The RSSI is irregularly measured because the RSSI is affected by the environment of the measurement space. If a distance value is incorrect because of unstable RSSI, the scenarios depicted in Figure 3, Figure 4 and Figure 5 occur.
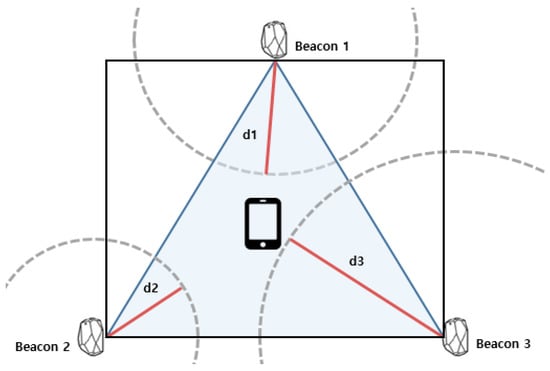
Figure 3.
Three circles in trilateration do not overlap.
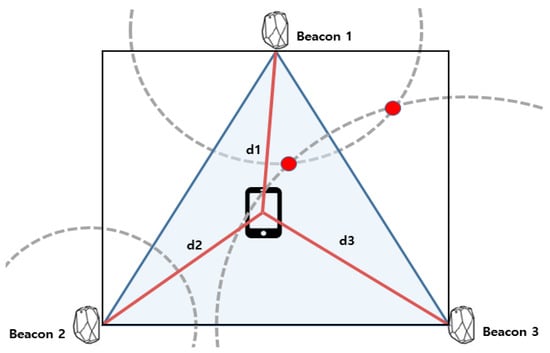
Figure 4.
Two circles overlap between two intersecting points.
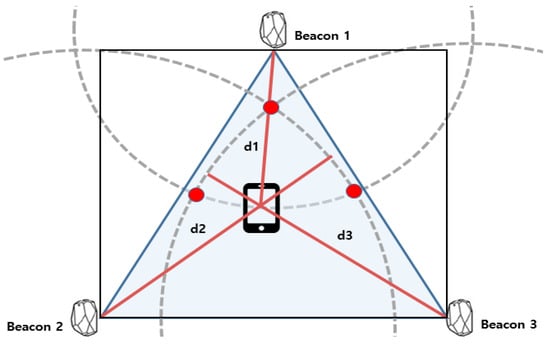
Figure 5.
Three circles do not intersect at a single point as required for trilateration.
In the event of an unstable RSSI, the circles of reception generated by the RSSI signals from each beacon do not meet. Without circle contact, the position of the mobile device cannot be calculated [17].
Figure 4 depicts the situation where only two of the three circles generated by the RSSI measured from each beacon are encountered. In this case, because two points of contact are generated in the circle, two locations of mobile devices can be calculated. However, the exact location of the mobile device cannot be obtained without the orientation provided by the third signal because it may appear that the mobile device is outside of the overlap when it actually may be inside the triangle [17].
Figure 5 illustrates the case where all three circles generated by the RSSI measured from each beacon overlap; however, they fail to meet at a single, specific point. The calculated distance differs from the actual distance, because although the three generated circles overlap, they are not seen at a single point but rather may be encountered at three points. In some cases, a circle may be encountered outside the triangle. Thus, the exact location of a mobile device cannot be determined.
4. Proposed Indoor Localization System
The proposed indoor positioning system consists of three major components. First, a data acquisition module collects the beacon RSSI values received by mobile devices from those mobile devices. The data is then corrected by the filter algorithm and a data processing module applies a positioning algorithm to the filtered results. The third major component, the data management module, stores and manages data processing results in a database. Figure 6 illustrates the structure of the proposed system.
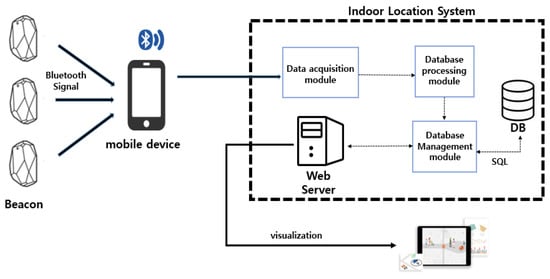
Figure 6.
Configuration of proposed indoor positioning system.
4.1. Data Acquisition Module
The data collection module collects various data from the user’s mobile device. The user’s mobile device runs an application that collects data from a beacon using Bluetooth communication and sends it to the data acquisition module of the indoor positioning system. The data acquisition module communicates with the mobile device through the mobile application and receives the message authentication code (MAC) value of the device, the identifier of the beacon, the Tx power, and the RSSI. The identifier of the beacon is collected to identify the user’s absolute location in the indoor space.
In this system, Eddystone EID frame is used as an identifier to distinguish beacons belonging to the system. The EID frame is composed of 8 bytes and the data configuration to transmit in actual communication is as shown in Table 3. The 0th byte is the area that defines the frame type and its EID is set to 0 × 30. The first byte is the Tx power. Next, the temporary ID for identifying the beacon is composed of 8 bytes [14].
Table 3.
Eddystone-EID structure.
4.2. Data Processing Module
The data processing module preprocesses the data to reduce the error range using a filtering algorithm to correct the RSSI data received from the data acquisition module. This module uses the RSSI data and Tx power data of the beacons collected by communicating with the mobile devices in the collection module to calculate the distance between each beacon and the mobile device, and then uses those distances to calculate the position of the user in the indoor space. The data calibration process used in this module is explained in Section 5.
4.3. Data Management Module
The data management module specifies the location of a user’s mobile device and manages various data required by the indoor positioning system after the data processing module has analyzed the data collected by the acquisition module.
Information about the computed location is stored in the local database of the indoor positioning system. To manage the beacons in the system, beacon identifiers and information about the actual location where each beacon is located in the indoor space are also stored in the system database, as are the distance data measured from each beacon in the indoor space. Additionally, several tables for aggregation are defined and to further facilitate data management. In the data management module, the Eddystone Configuration GATT Service can be used to communicate with the beacons to set Tx power, signal interval, and so on [18].
5. Application and Measurement Results of Filter Algorithm
5.1. Apply Filter Algorithm
When an RSSI broadcast by a beacon near a mobile device is collected by an application running on the mobile device, the data processing module of the positioning system corrects the value by applying a filter algorithm. The application of the filter algorithm is divided into two steps. The first is the application of the average filter. As explained previously, because RSSI is highly influenced by ambient noise, new results are obtained for every measurement even if measurements have already been performed at the same position. To solve this problem, after collecting the RSSI several times, the average filter was applied to correct the RSSI value. The formula of the average filter is delineated in Equation (3).
In Equation (3), x represents data, that is, RSSI, and k indicates the measurement time. The value of the k-th data is calculated by weighting the measured value at the k-th measurement and the calculated values before that. The following is the application of the Kalman Filter. Kalman filter is applied to the corrected value once using the average filter, and the correction process is repeated. A Kalman filter is a recursive filter that tracks the state of a dynamic system that contains noise. The operation of the Kalman filter is shown Figure 7. [19] The application of the Kalman filter consists of a state prediction step and a two-part measurement update step. The data are corrected while continuously repeating this process.
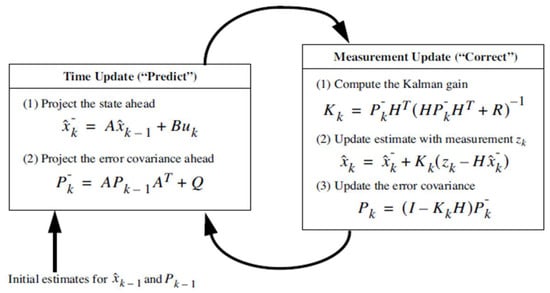
Figure 7.
The process of tracking the state of a Kalman filter.
When new data are received, the state prediction step predicts the state of the new data based on the previously estimated state. The measurement update step calculates the current state of the data by determining which are more reliable based on the state of the data predicted in the state prediction step and actual measured data [20].
5.2. RSSI Correction Result
This section discussed the results of calibrating the RSSI by applying a filter algorithm. For the experiment, we installed a beacon in a specific space, received the RSSI on the mobile device, and then used it to calculate the distance between the beacon and the mobile device. To reduce the influence of other factors on the comparison of the result, other factors such as the Tx power of the beacon and the advertise interval were set equal to a predetermined value before performing the measurement. The performance was analyzed by comparing measurement results obtained without applying the filter algorithm with those obtained using the filter algorithm.
Figure 8 shows the results of RSSI measurements taken at a distance of 2 m from a single beacon for several seconds. Figure 8a shows the raw data, and Figure 8b shows the corrected data. As observed in the graphs, irregular data were recorded for each measurement even if the RSSI data without the algorithm had been measured at the same position. Conversely, it was confirmed that the data corrected by applying the filter algorithm were stable and constant compared to the raw data.
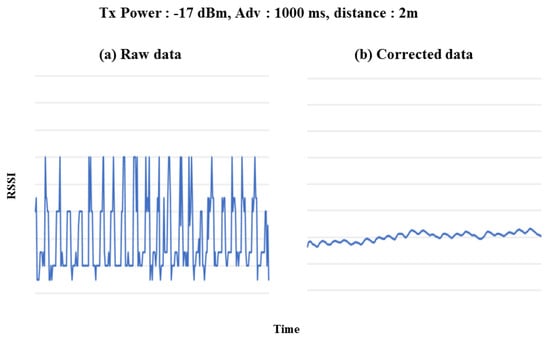
Figure 8.
RSSI measurement results: (a) Raw data; (b) Corrected data.
Figure 9, Figure 10 and Figure 11 show the results of distance measurements at various distances. The distances were measured using RSSI at distances of 4 m, 7 m and 11 m, respectively, and then plotted as a graph. Compared with the raw data, the corrected data has a more stable and has an error value within 10%. However, it has been confirmed that the measurement distance is less accurate at a distance of 11 m or more.
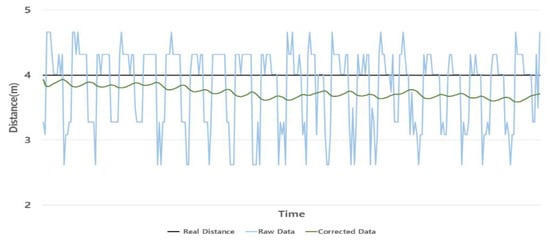
Figure 9.
Distance measurement result (4 m).
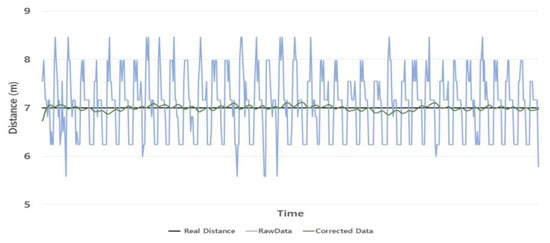
Figure 10.
Distance measurement result (7 m).
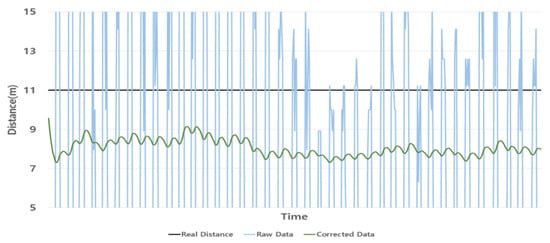
Figure 11.
Distance measurement result (11 m).
5.3. Indoor Localization
This section describes the calculation of the position coordinates and analyzes the performance of the proposed indoor positioning system. Figure 12 depicts the experimental setup of the measurement space environment. There are many beacons spaced 8 m apart in the indoor space where the measurement takes place. The process began when a user’s mobile device received a beacon broadcasting signal. If three or more signals were received at the same time, three nearby values were selected, and the distances from the corresponding beacons were measured. After applying the filter algorithm and calculating the distance from each beacon, the position coordinates of the mobile device were determined using the trilateration method.
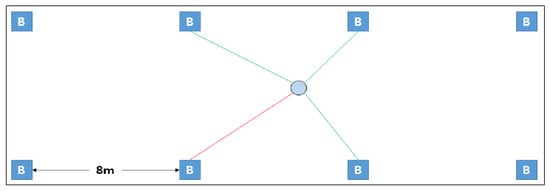
Figure 12.
Indoor positioning environment.
Figure 13 shows the result of coordinate the smart device in the experimental space. The experimental space is 8 m × 8 m and beacons are installed at each corner. In order to analyze the performance, several measurements were made from specific locations to several devices and the result were analyzed. As observed Figure 13, the result of using raw data is unstable. Thus, coordinates are recorded at different position every time and are different from the actual position.
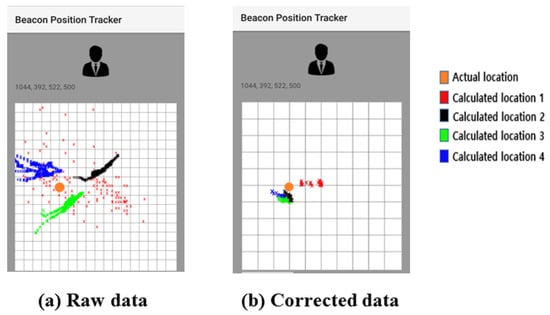
Figure 13.
positioning results: (a) Raw data; (b) Corrected data.
In contrast, the data that applied the filter algorithm was self-reinforcing and confirmed that the coordinates were measured at a certain position. We confirmed that the measured position differs by about 1m from the actual position.
6. Conclusions
In this paper, we propose an indoor positioning system that corrects unstable RSSI and improves the accuracy of location measurement by using filter algorithm based on average filter and EKF. In identifying beacon’s identifier, we used ephemeral ID to improve security. We used Google’s Eddystone-EID frame to generate ephemeral ID. We calculate the distance between the beacon and the device using the filter algorithm applied data at various distance and compared the results with the raw data. And we used the data to coordinate the position of the device and analyze the results. As a result, we confirmed that our method can achieve stable performance at distances of less than 7 m. However, performance degrades in a space where the distance between the beacon and the device exceeds 7 m. In the future, we will study algorithms that can achieve good performance even when the distance between the beacon and the device is farther. We intend to develop an indoor positioning system with good performance in a wider space even with a small number of beacons.
Author Contributions
J.K. and J.S. conceived the algorithm and designed the system. J.K. performed the experiments; J.S. analyzed the data; Y.W. guided this work and provided extensive revisions during the study. All authors have read and approved the final manuscript.
Funding
This research received no external funding.
Acknowledgments
This research was supported by the MSIT (Ministry of Science and ICT), Korea, under the ITRC (Information Technology Research Center) support program (IITP-2018-2016-0-00304) supervised by the IITP (Institute for Information & communications Technology Promotion).
Conflicts of Interest
The authors declare no conflict of interest.
References
- KISA. LBS Industry Trend Report. Available online: http://www.kisa.or.kr/uploadfile/201805/201805281657080943.pdf (accessed on 15 June 2018).
- Technavio. Global Location-Based Services (LBS) Market 2017–2021. Available online: https://www.prnewswire.com/news-releases/global-location-based-services-lbs-market---analysis-technologies--forecasts-to-2021---growing-popularity-of-proximity-based-mobile-advertising-among-enterprises---research-and-markets-300465016.html (accessed on 17 June 2018).
- Mercer, D. Connected World: The Internet of Things and Connected Devices in 2020. Available online: https://www.strategyanalytics.com/access-services/devices/connected-home/consumer-electronics/reports/report-detail/connected-world-the-internet-of-things-and-connected-devices-in-2020 (accessed on 20 June 2018).
- Inoue, Y.; Sashima, A.; Kurumatani, K. Indoor Positioning System Using Beacon Devices for Practical Pedestrian Navigation on Mobile Phone; Springer: Berlin/Heidelberg, Germany, 2009; pp. 251–265. [Google Scholar]
- Lin, X.-Y.; Ho, T.-W.; Fang, C.-C.; Yen, Z.-S.; Yang, B.-J.; Lai, F. A mobile Indoor Positioning System Based on iBeacon Technology. In Proceedings of the 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC ’15), Milan, Italy, 25–29 August 2015; pp. 4970–4973. [Google Scholar]
- Rida, M.E.; Liu, F.; Jadi, Y.; Algawhari, A.A.A.; Askourih, A. Indoor location position based on Bluetooth Signal Strength. In Proceedings of the 2nd International Conference on Information Science and Control Engineering, Shanghai, China, 24–26 April 2015. [Google Scholar]
- Momose, R.; Nitta, T.; Yanagisawa, M.; Togawa, N. An accurate indoor positioning algorithm using particle filter based on the proximity of Bluetooth beacons. In Proceedings of the IEEE 6th Global Conference on Consumer Electronics (GCCE), Nagoya, Japan, 24–27 October 2017. [Google Scholar]
- Pelant, J.; Tlamsa, Z.; Benes, V.; Polak, L.; Kaller, O.; Bolecek, L.; Kufa, J.; Sebesta, J.; Kratochvil, T. BLE device indoor localization based on RSS fingerprinting mapped by propagation modes. In Proceedings of the 2017 27th International Conference Radioelektronika (RADIOELEKTRONIKA), Brno, Czech Republic, 19–20 April 2017; pp. 1–5. [Google Scholar]
- Luo, W.; Deng, X.; Zhang, F.; Wen, Y.; Kadhim, D.J. Positioning and guiding educational robots by using fingerprinting of WiFi and RFID array. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 170. [Google Scholar] [CrossRef]
- Dong, X.; Se, B.; Jiang, R. Indoor robot localization combining feature clustering with wireless sensor network. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 175. [Google Scholar] [CrossRef]
- Github. Google/Eddystone: Eddystone-UID. Available online: https://github.com/google/eddystone/tree/master/eddystone-uid (accessed on 13 July 2018).
- Github. Google/Eddystone: Eddystone-URL. Available online: https://github.com/google/eddystone/tree/master/eddystone-url (accessed on 13 July 2018).
- Github. Google/Eddystone: Eddystone-TLM. Available online: https://github.com/google/eddystone/tree/master/eddystone-tlm (accessed on 13 July 2018).
- Github. Google/Eddystone: Eddystone-EID. Available online: https://github.com/google/eddystone/tree/master/eddystone-eid (accessed on 13 July 2018).
- Github. Google/Eddystone: Eddystone-EID Computation. Available online: https://github.com/google/eddystone/blob/master/eddystone-eid/eid-computation (accessed on 13 July 2018).
- Shchekotov, M. Indoor Localization Method Based on Wi-Fi Trilateration Technique. In Proceedings of the 16th Conference of Fruct Association, Oulu, Finland, 27–31 October 2014. [Google Scholar]
- Kwak, J.; Sung, Y. Beacon-Based Indoor Location Measurement Method to Enhanced Common Chord-Based Trilateration. J. Inf. Process. Syst. 2017, 13, 1640–1651. [Google Scholar] [CrossRef]
- Github. Google/Eddystone/Configuration-Service/Eddystone Configuration GATT Service. Available online: https://github.com/google/eddystone/tree/master/configuration-service (accessed on 13 July 2018).
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina at Chapel Hill: Chapel Hill, NC, USA, 2001. [Google Scholar]
- Paul, A.S. RSSI-Based Indoor Localization and Tracking Using Sigma-Point Kalman Smoothers. IEEE J. Sel. Top. Signal Process. 2009, 3, 860–873. [Google Scholar] [CrossRef]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).