
A Comparative Study of Breaking Wave Loads on Cylindrical and Conical Substructures



Abstract
1. Introduction
2. Numerical Model
2.1. Governing Equations
2.2. Free Surface Modelling
2.3. Turbulence Modelling
3. Numerical Model
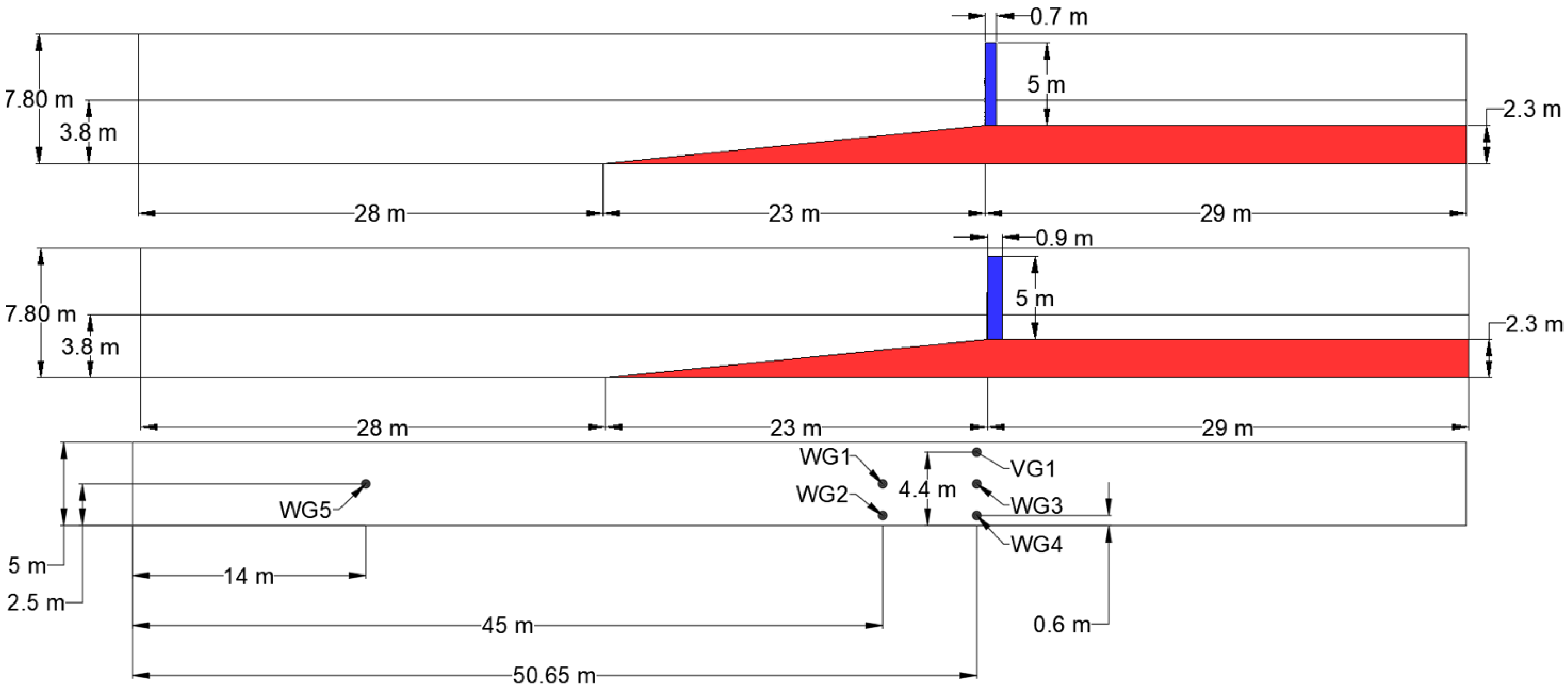
3.1. Experimental Set-Up
3.2. Model Description
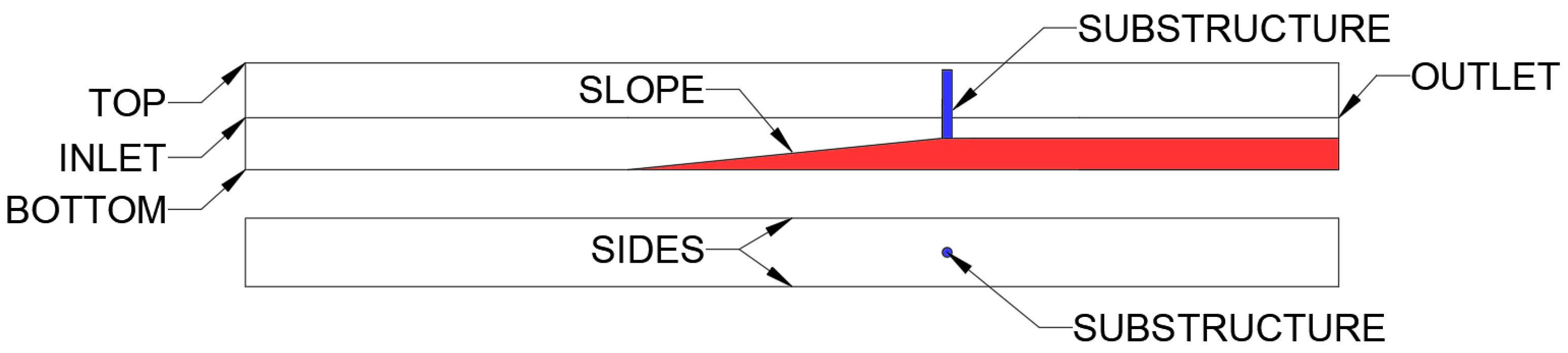
3.3. Boundary Conditions
3.4. Discretization Schemes
3.5. Simulation Cases
4. Result and Discussion
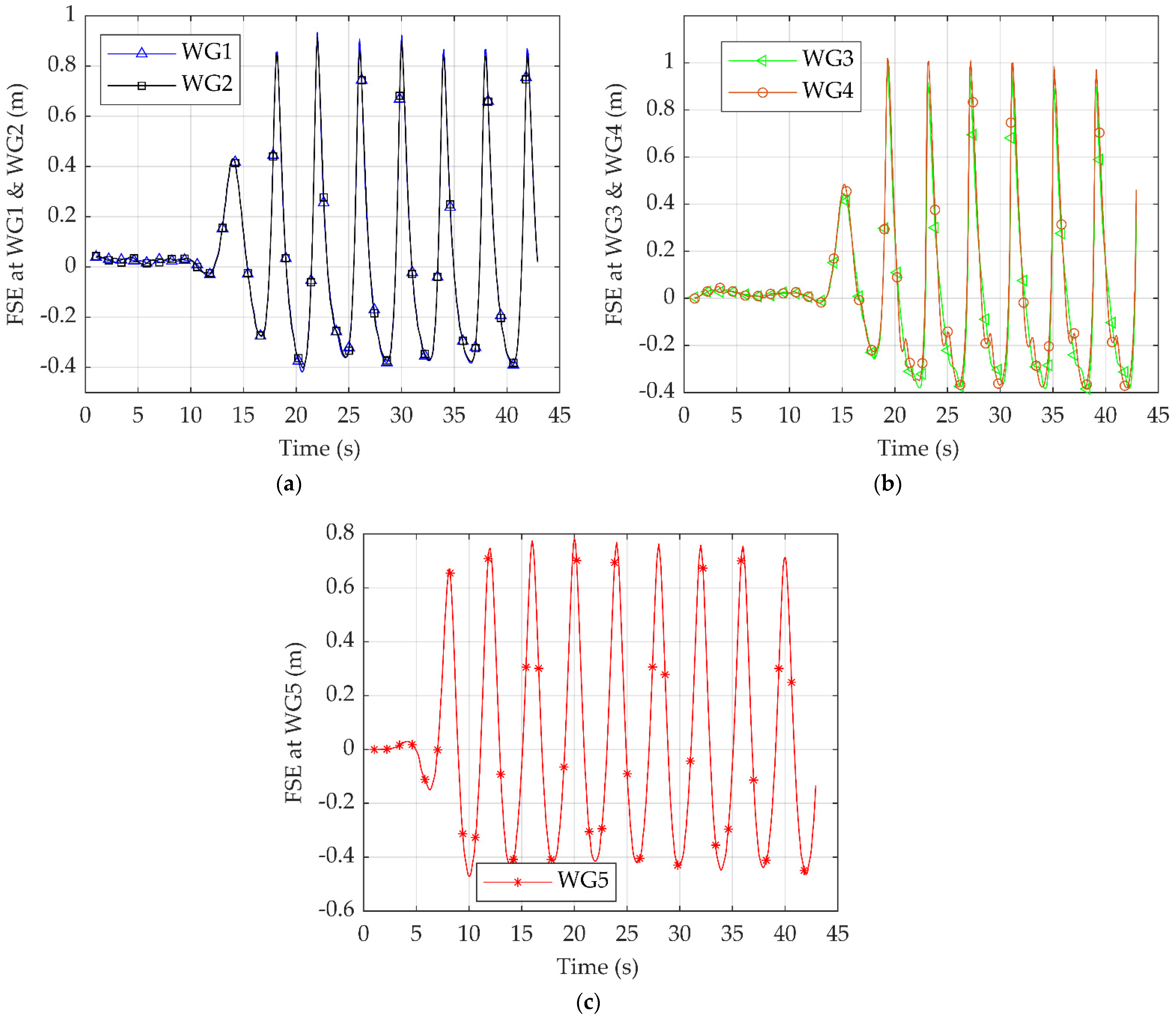
4.1. Wave Generation Capabilities
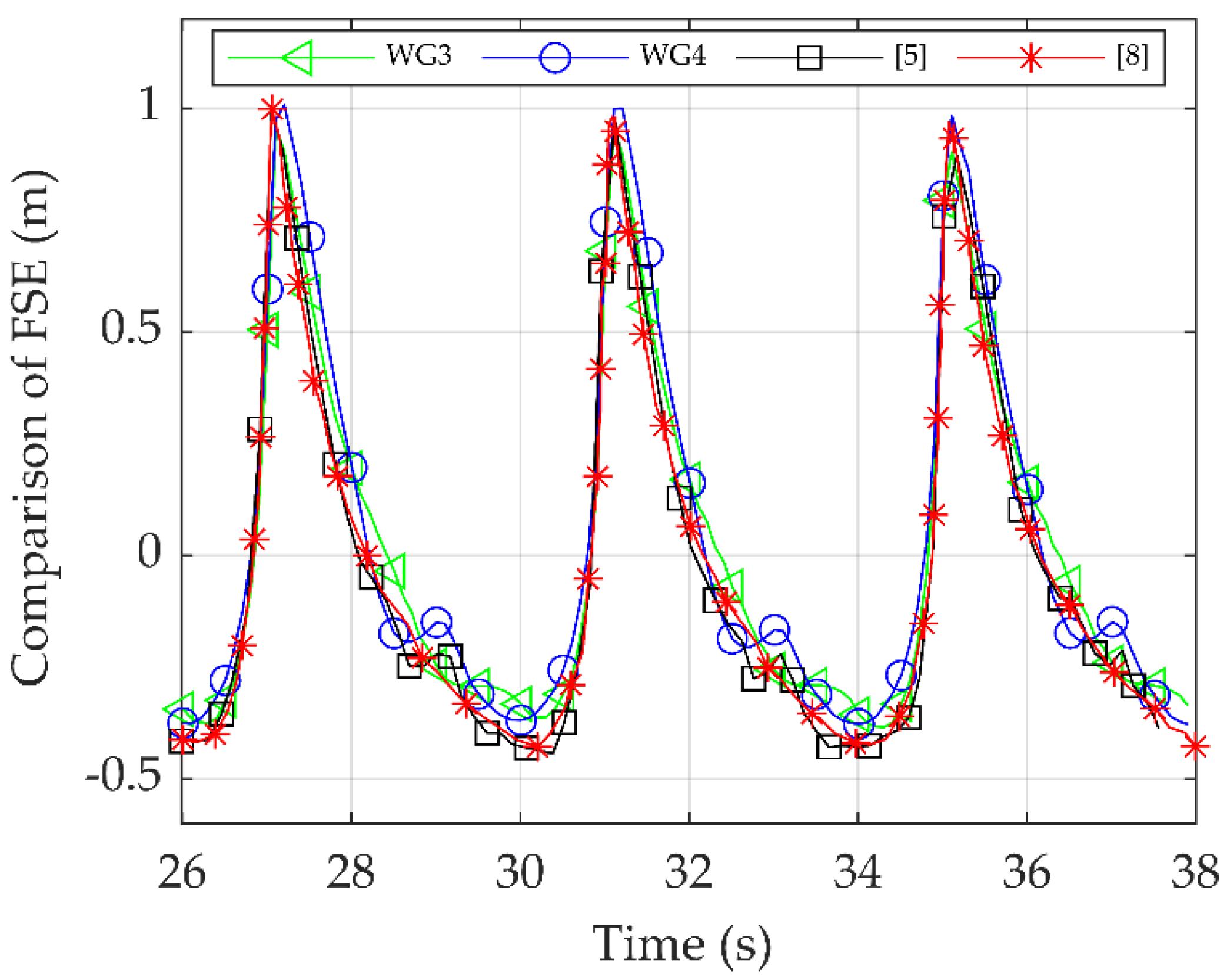
4.2. Comparison of the Free Surface Elevation with Available Experimental and Numerical Data
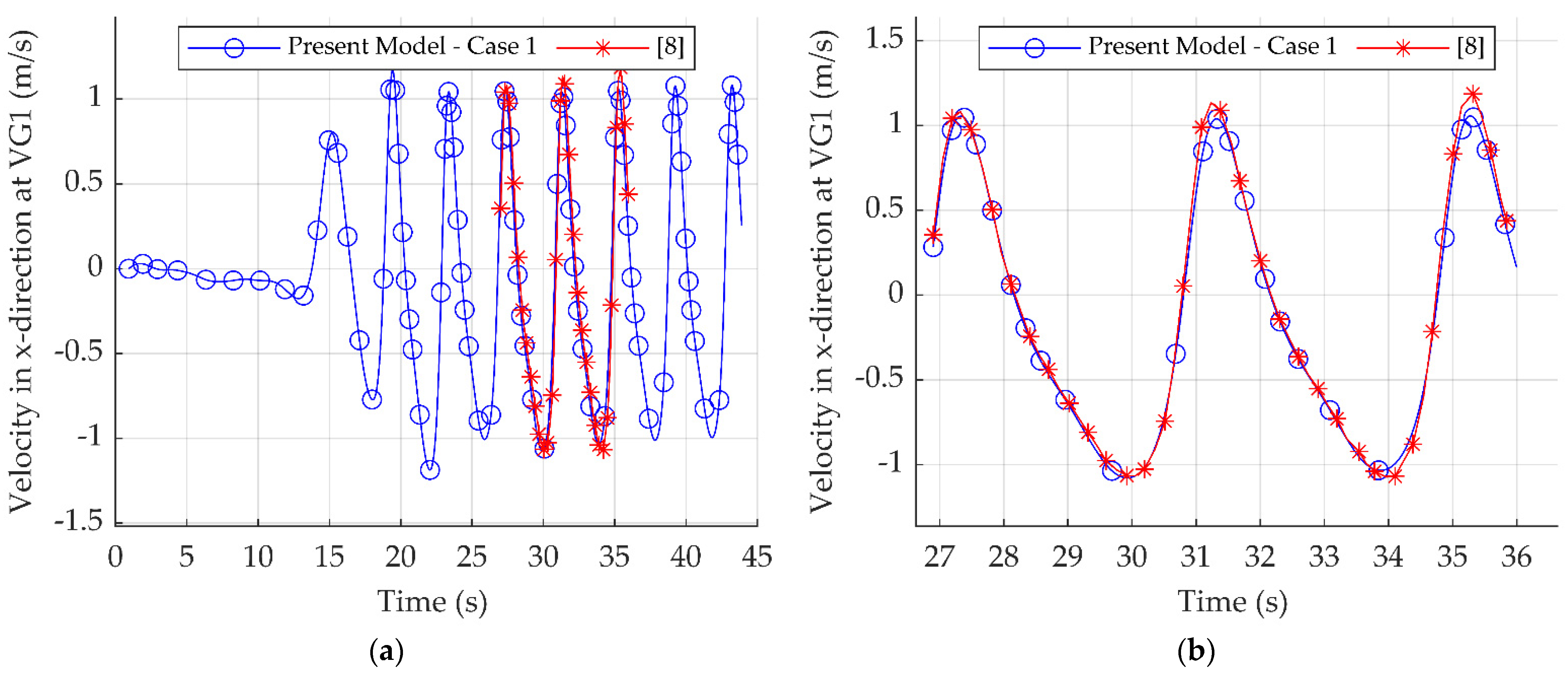
4.3. Comparison of the Velocity with Available Numerical Data
4.4. Velocity Distribution Near the Simulation Case 2 Substructure Over Time
4.5. Pressure Distribution Near the Simulation Case 2 Substructure Over Time
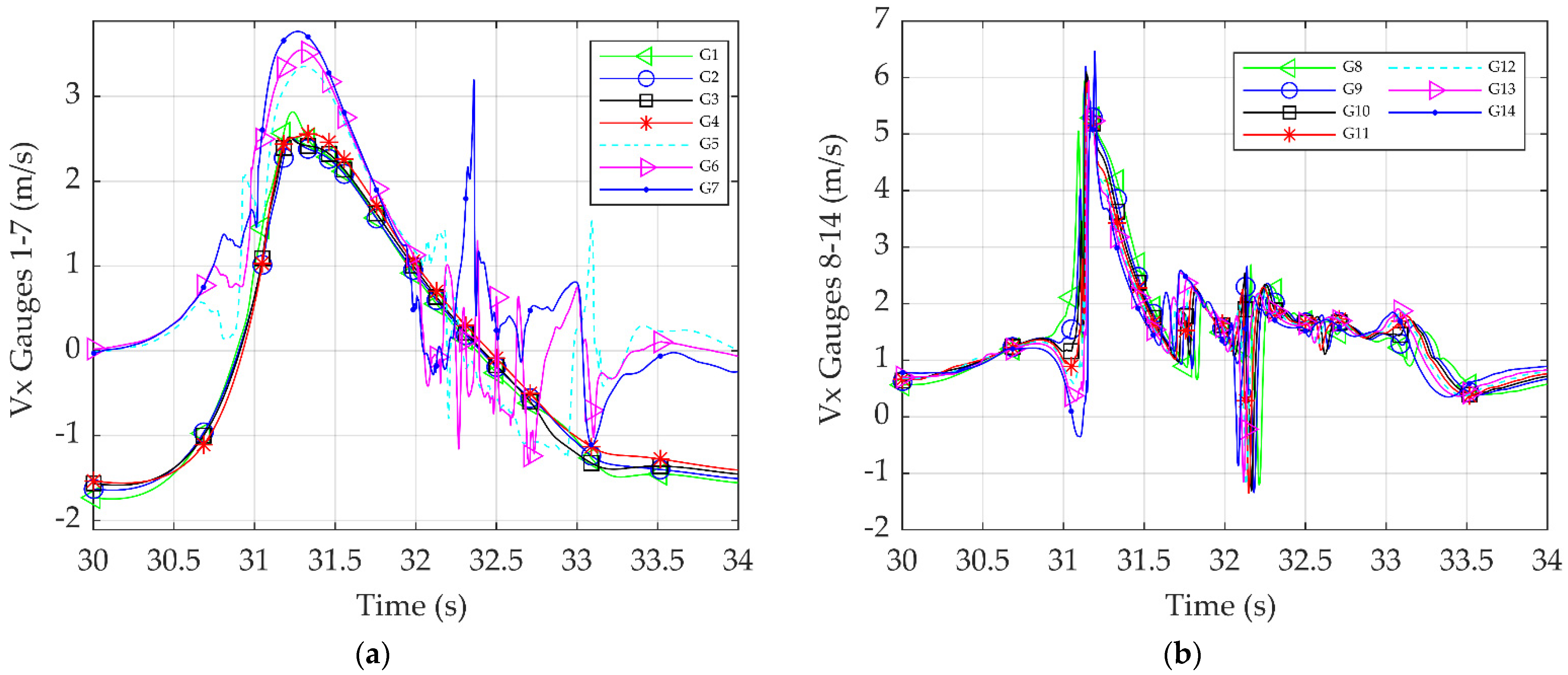
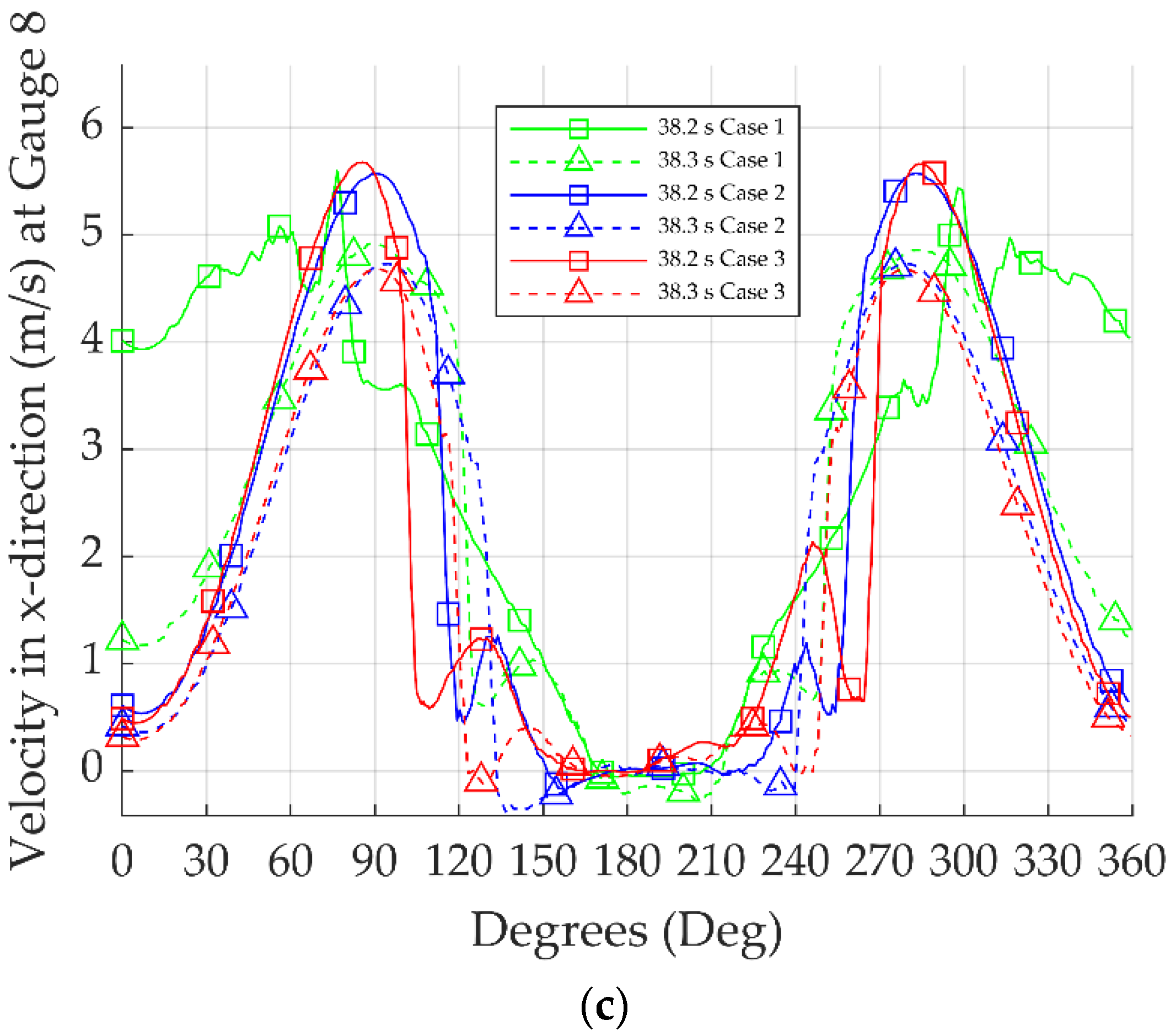
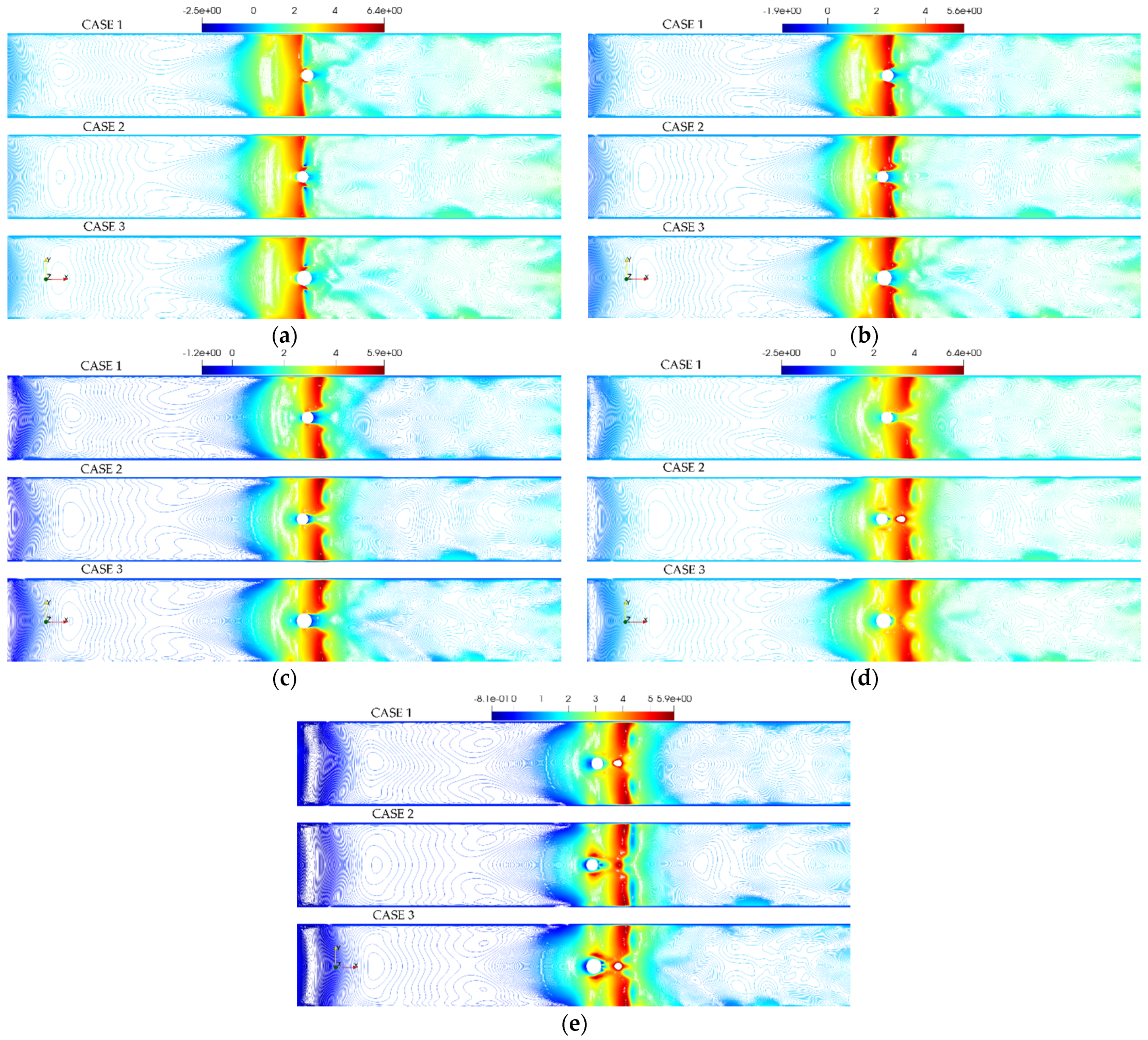
4.6. Comparison of the Velocity Distribution around Substructures at Different Heights
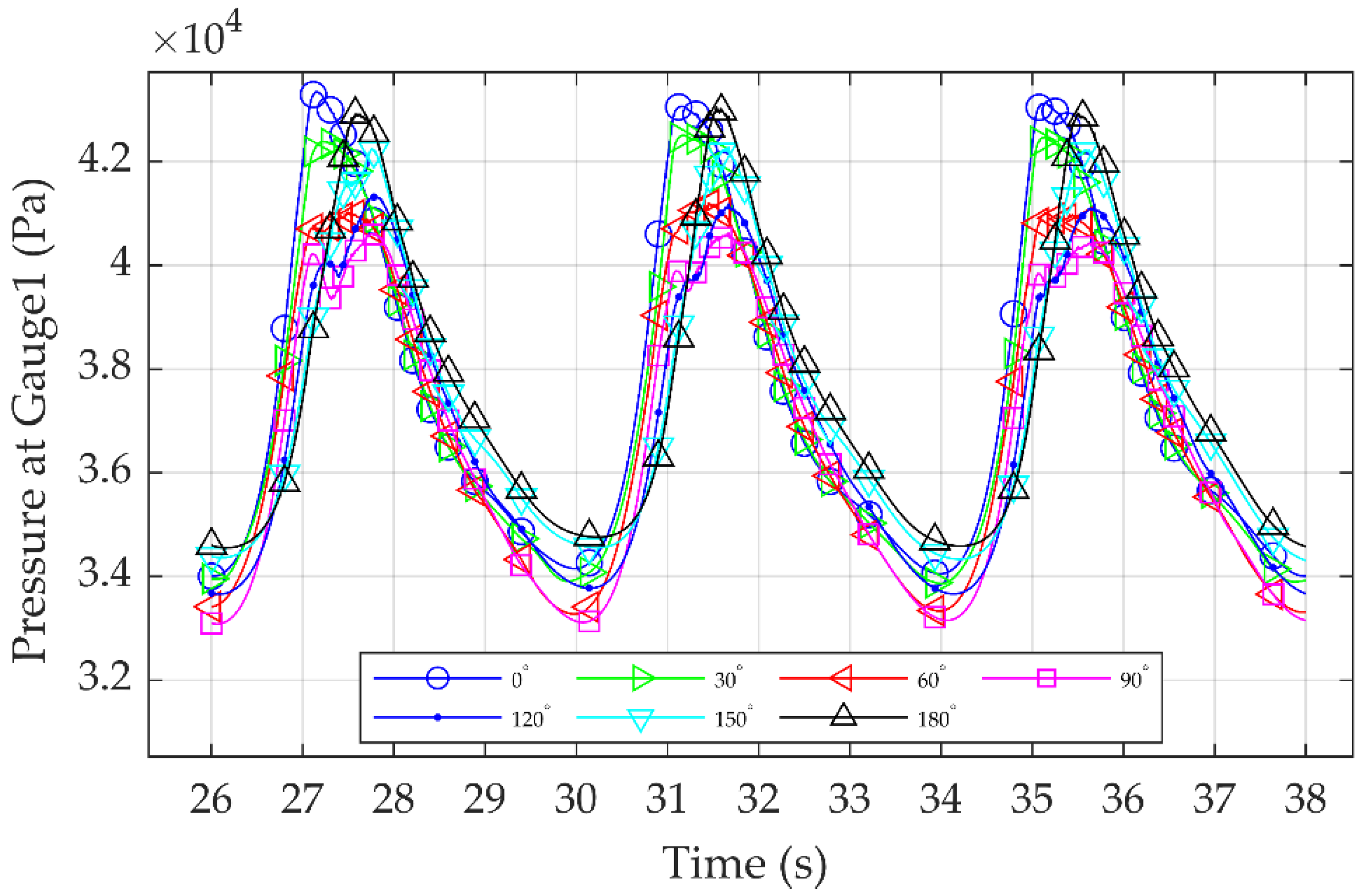
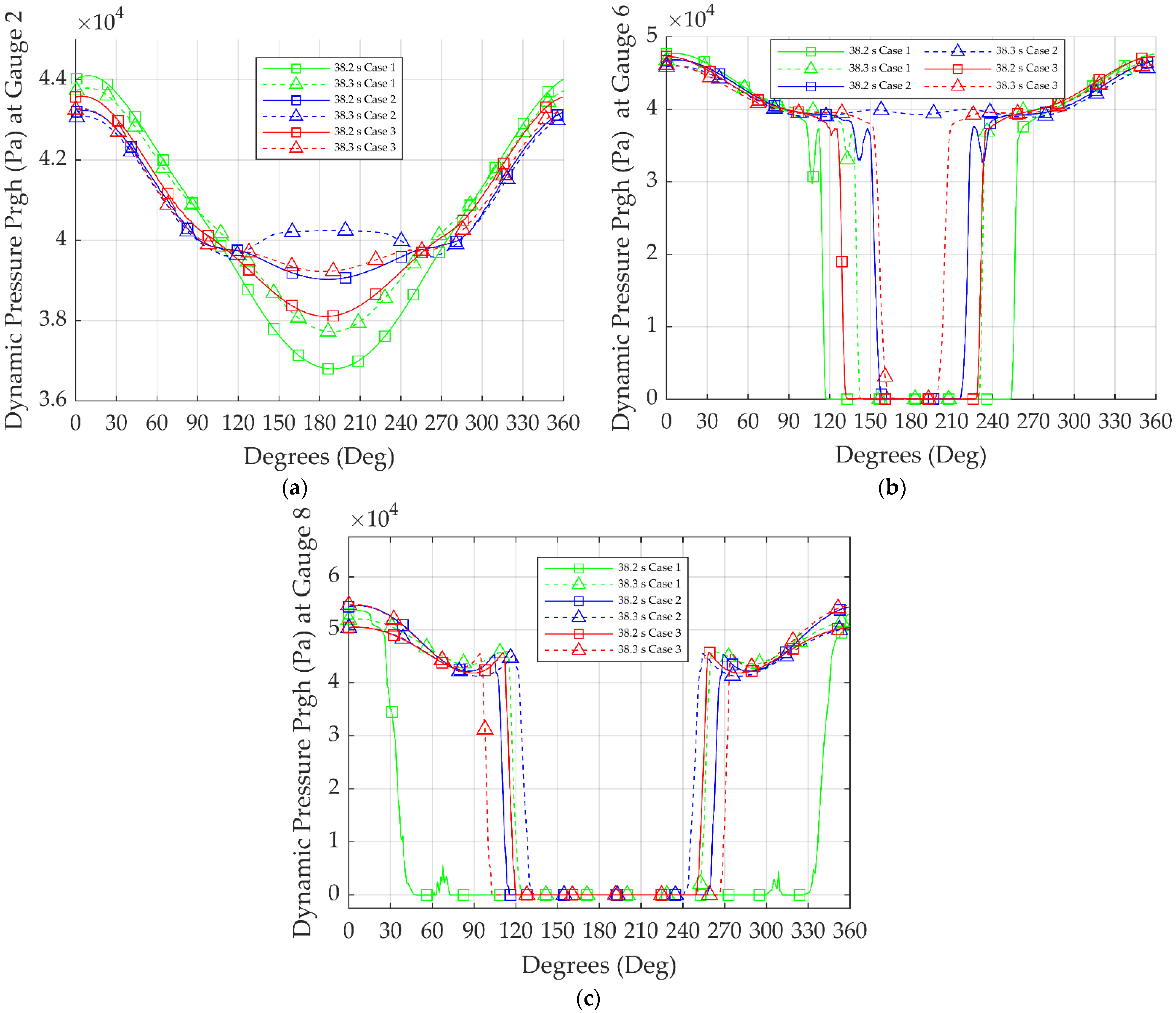
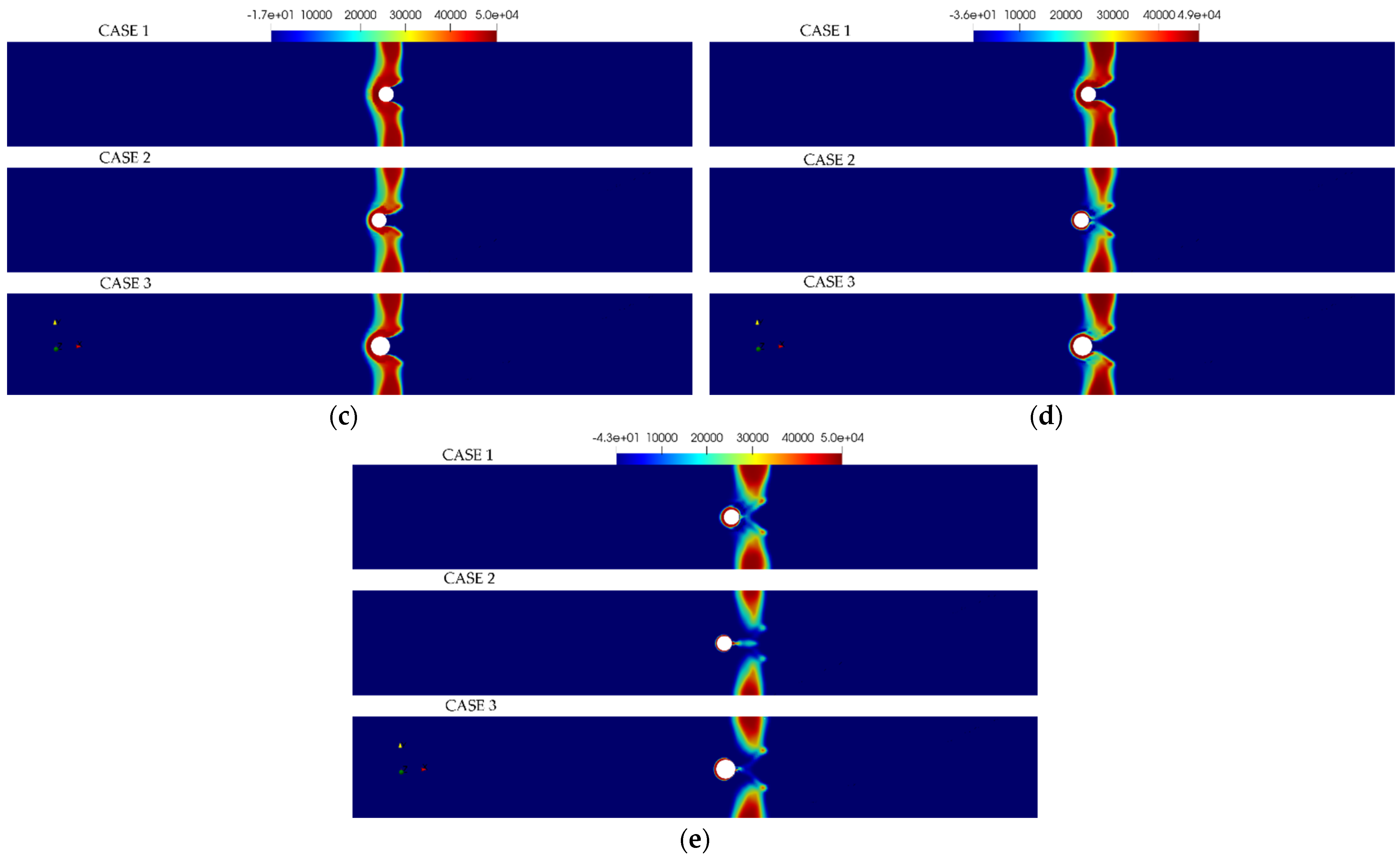
4.7. Comparison of the Pressure Distribution around Substructures at Different Heights
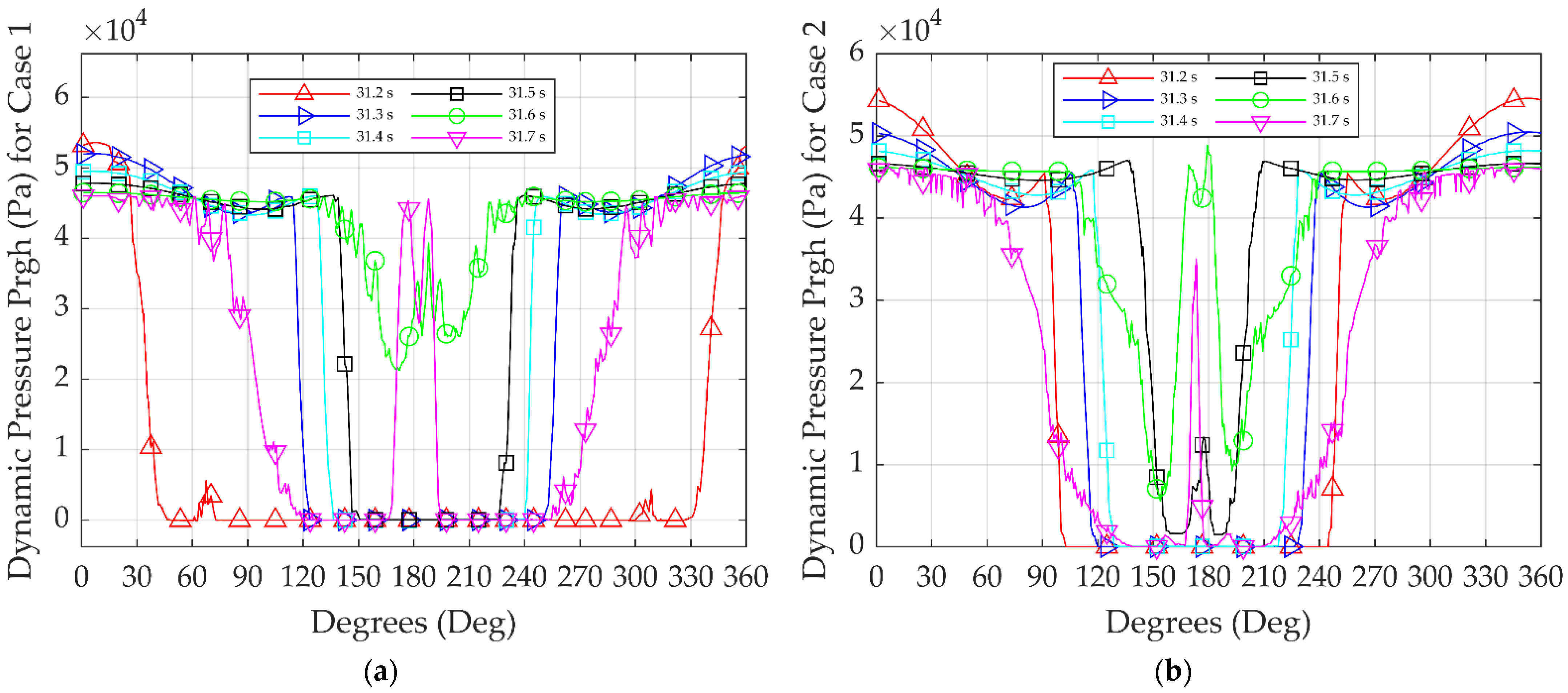
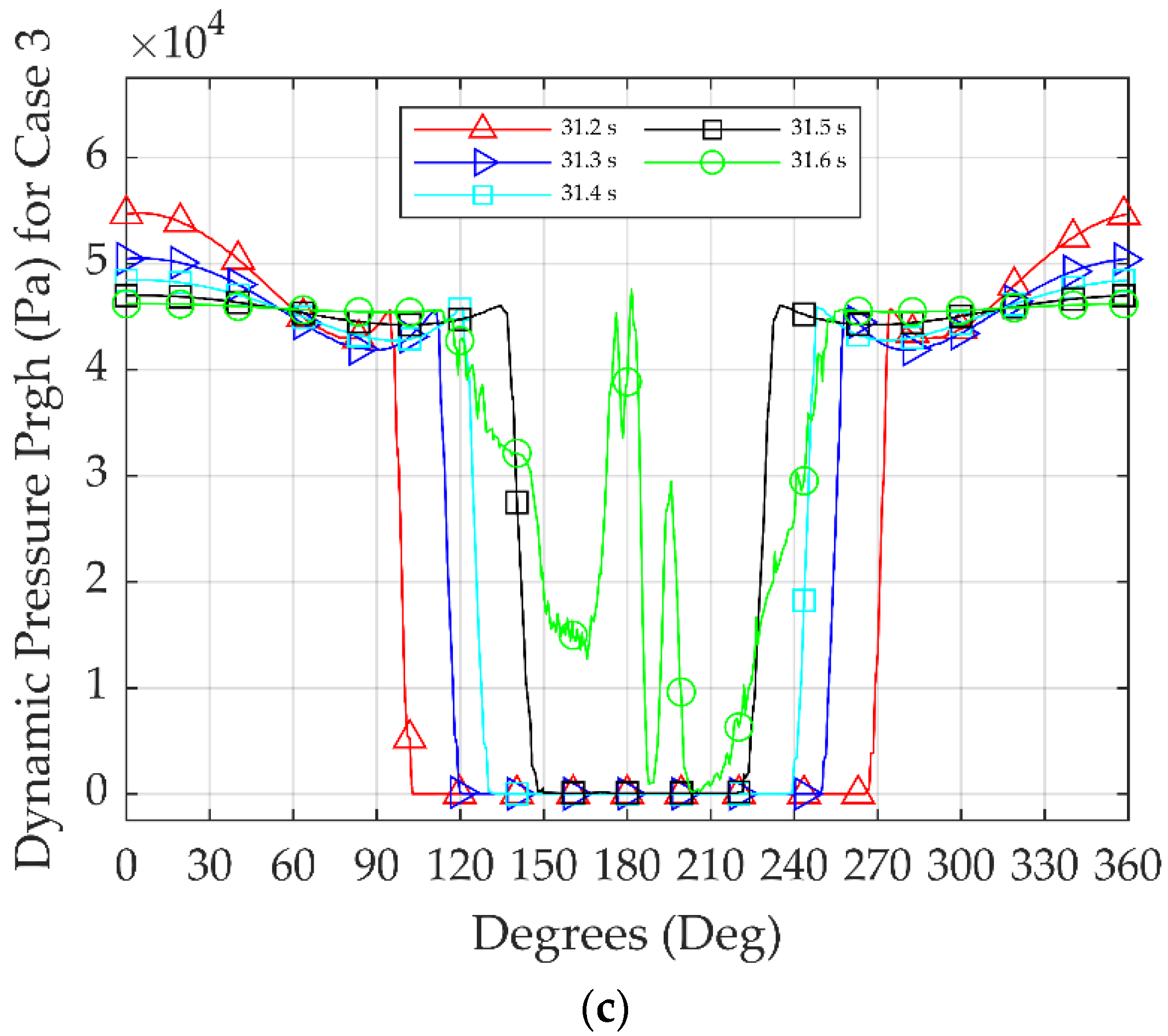
4.8. Dynamic Pressure Distribution around the Substructure at Different Time Steps
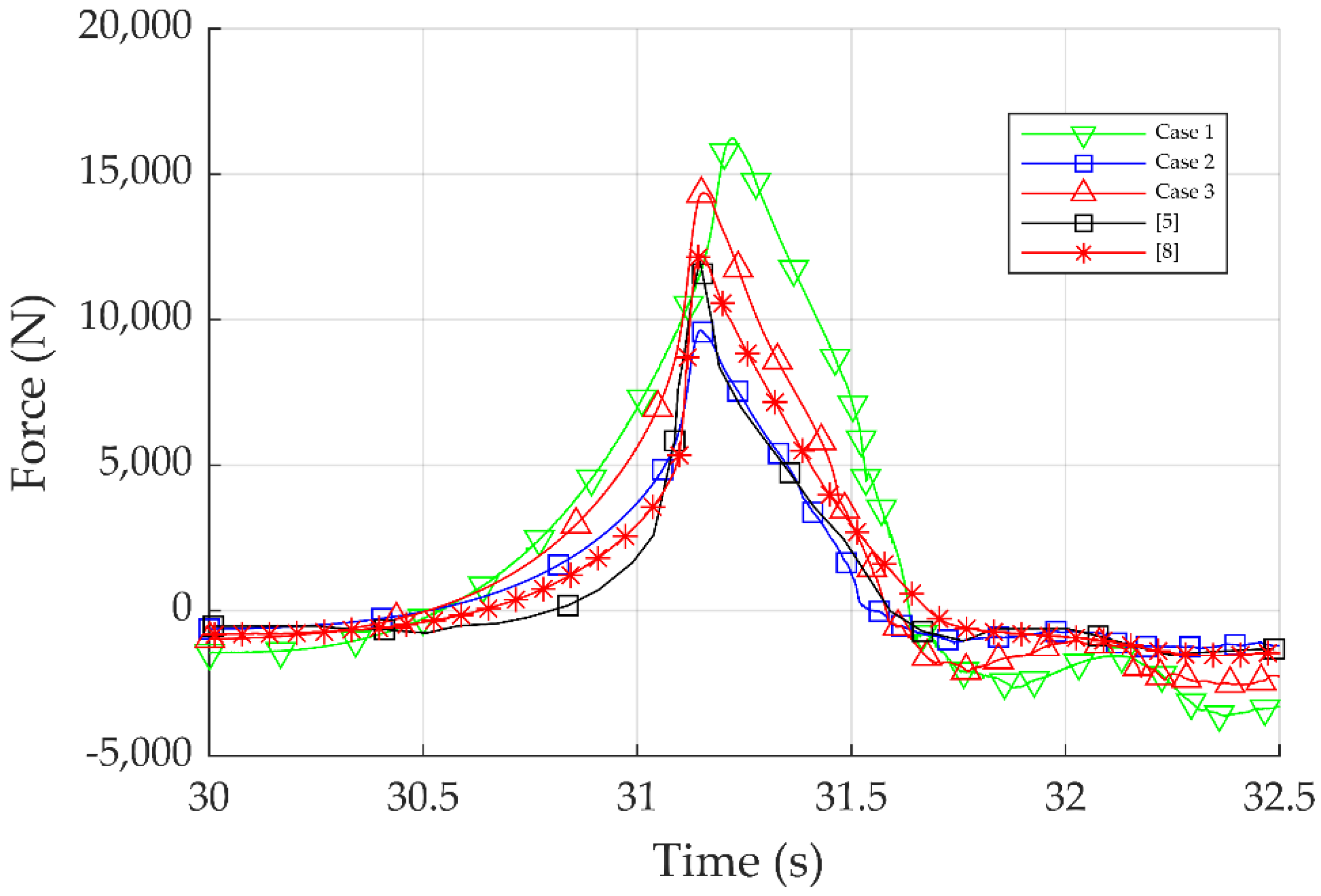
4.9. Breaking Wave Loads
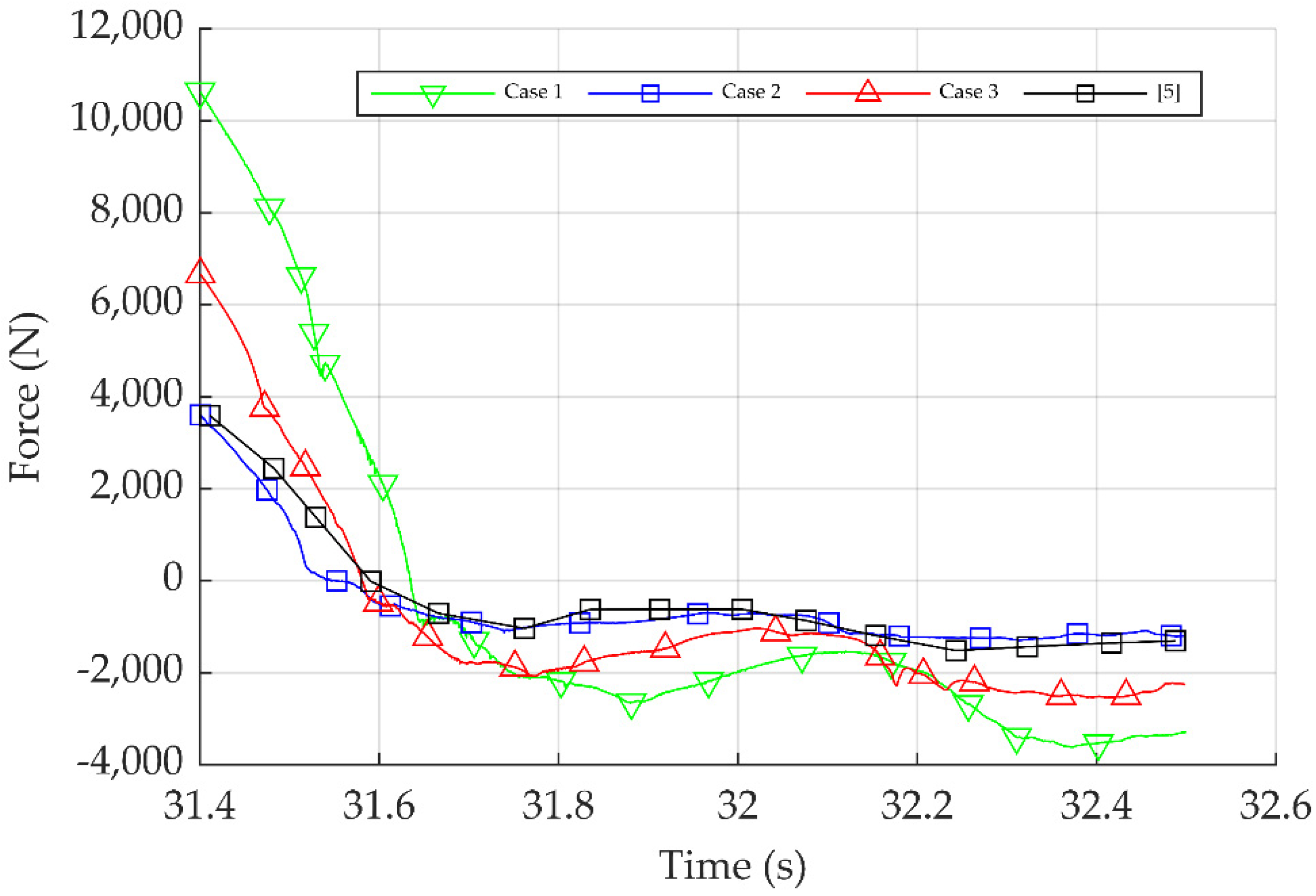
4.10. Secondary Wave Load
5. Conclusions
- The evidence from this study suggests that the primary wave load increased when the diameter of the substructure increased. As aforementioned, the wave breaking occurred with a delay when the substructure was conical and the breaker location was displaced further to the right; an increase of 62.57% was noted in the primary wave load compared to the numerical results of simulation Case 2.
- The findings of this study also indicated that the diffracted waves created local pressure on the substructure’s rear side, which was related to the creation of the secondary load. The percentage of the secondary load ratio to the primary wave load for the experimental data and simulation Case 2 where the set-up was similar was only 4.84%. Notably, the substructure diameter influenced the behaviour of the secondary load cycle. As the diameter of the substructure increased, the wave reflection increased, and the secondary wave load also increased. The magnitude of the secondary load in the conical substructure was 3.39 times higher than that in Case 2, and the ratio of the primary-to-secondary wave load doubled in the conical substructure compared to Case 2, which was 4.91%. Consequently, the performance of a conical substructure will deteriorate under the influence of breaking wave load compared to a cylindrical one. The upshot of this, then, is that it is not recommend to use such a substructure in place of a cylindrical one.
- This study has also yielded evidence to suggest that the velocity distribution near the circumference of the conical substructure close to the seabed was clearly affected by the different geometry, with declinations between 25.5 to 41.6% compared to the cylindrical substructures. In contrast, the velocity distribution near the circumference of all substructures close to the wave breaking height did not change significantly with declinations between 1–4%. The diameter and the geometry of the substructures were different. It would also appear that the dynamic pressure distribution around the substructures did not change significantly with the increase in the substructures’ diameter and the change of the gauge height, although the incident wave conditions were the same for all cases.
- This study has also provided results to show that when the wavefield hit the substructures, the velocity decreased to 0 m/s at 0°, which was the stagnation point. As the wave propagated around the substructure’s circumference, the velocity continued to increase on both sides until 90°, where the velocity reached its maximum level. As the wave continued to propagate around the substructure’s rear side, the velocity decreased and created another stagnation point.
- The study’s findings have also revealed that the dynamic pressure acting on the substructures reached its peak values at the front surface (0°). Then, the wave propagated from the high-pressure region to the low-pressure region. Near 135° around the cylinder circumference, the dynamic pressure value reached a minimum. As the wave propagated around the substructure’s rear side, the velocity decreased and another stagnation point was observed, therefore creating additional peaks of the dynamic pressure.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wind Europe. Wind in Our Sails: The Coming of Europe’s Offshore Wind Energy Industry; Wind Europe: Brussels, Belgium, 2011. [Google Scholar]
- Wind Europe. Offshore Wind in Europe: Key Trends and Statistics 2019; Wind Europe: Brussels, Belgium, 2020. [Google Scholar]
- Wienke, J.; Sparboom, U.; Oumeraci, H. Breaking Wave Impact on a Slender Cylinder. In Proceedings of the Coastal Engineering 2000; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2001; pp. 1787–1798. [Google Scholar]
- Wienke, J.; Oumeraci, H. Breaking wave impact force on a vertical and inclined slender pile—Theoretical and large-scale model investigations. Coast. Eng. 2005, 52, 435–462. [Google Scholar] [CrossRef]
- Irschik, K.; Sparboom, U.; Oumeraci, H.; Smith, J.M. Breaking wave loads on a slender pile in shallow water. In Proceedings of the Coastal Engineering 2004; World Scientific Pub. Co. Pte Ltd.: Singapore, 2005; Volume 4, pp. 568–580. [Google Scholar]
- Liu, S.; Jose, J.; Ong, M.C.; Gudmestad, O.T. Characteristics of higher-harmonic breaking wave forces and secondary load cycles on a single vertical circular cylinder at different Froude numbers. Mar. Struct. 2019, 64, 54–77. [Google Scholar] [CrossRef]
- Qu, S.; Liu, S.; Ong, M.C.; Sun, S.; Ren, H. Numerical Simulation of Breaking Wave Loading on Standing Circular Cylinders with Different Transverse Inclined Angles. Appl. Sci. 2020, 10, 1347. [Google Scholar] [CrossRef]
- Jose, J.; Choi, S.-J.; Giljarhus, K.E.T.; Gudmestad, O.T. A comparison of numerical simulations of breaking wave forces on a monopile structure using two different numerical models based on finite difference and finite volume methods. Ocean Eng. 2017, 137, 78–88. [Google Scholar] [CrossRef]
- Liu, S.; Ong, M.C.; Obhrai, C. Numerical Simulations of Breaking Waves and Steep Waves Past a Vertical Cylinder at Different Keulegan–Carpenter Numbers. J. Offshore Mech. Arct. Eng. 2019, 141, 041806. [Google Scholar] [CrossRef]
- Chella, M.A.; Bihs, H.; Myrhaug, D. Wave impact pressure and kinematics due to breaking wave impingement on a monopile. J. Fluids Struct. 2019, 86, 94–123. [Google Scholar] [CrossRef]
- Kamath, A.; Chella, M.A.; Bihs, H.; Arntsen, Ø.A. Breaking wave interaction with a vertical cylinder and the effect of breaker location. Ocean Eng. 2016, 128, 105–115. [Google Scholar] [CrossRef]
- Brackbill, J.U.; Kothe, D.B.; Zemach, C. A continuum method for modeling surface tension. J. Comput. Phys. 1992, 100, 335–354. [Google Scholar] [CrossRef]
- Heller, V. Scale Effects in Physical Hydraulic Engineering Models. J. Hydraul. Res. 2011, 49, 293–306. [Google Scholar] [CrossRef]
- Hughes, S.A. Physical Models and Laboratory Techniques in Coastal Engineering; World Scientific: Singapore, 1993; Volume 7. [Google Scholar]
- Hirt, C.; Nichols, B. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Rusche, H. Computational Fluid Dynamics of Dispersed Two-Phase Flows at High Phase Fractions. Ph.D. Thesis, Imperial College of Science, Technology and Medicine, London, UK, 2002. [Google Scholar]
- Menter, F.; Ferreira, J.C.; Esch, T.; Konno, B. The SST Turbulence Model with Improved Wall Treatment for Heat Transfer Predictions in Gas Turbines. In Proceedings of the International Gas Turbine Congress 2003 Tokyo, Tokyo, Japan, 2–7 November 2003; pp. 1–7. [Google Scholar]
- Launder, B.; Spalding, D. The numerical computation of turbulent flows. Comput. Methods Appl. Mech. Eng. 1974, 3, 269–289. [Google Scholar] [CrossRef]
- Wilcox, D.C. Turbulence Modelling for CFD; DCW Industries: La Canada, CA, USA, 1998. [Google Scholar]
- Higuera, P.; Lara, J.L.; Losada, I.J. Three-Dimensional Interaction of Waves and Porous Coastal Structures Using OpenFOAM®. Part I: Formulation and Validation. Coast. Eng. 2014, 83, 243–258. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Φ | σκ | σω | β | γ |
|---|---|---|---|---|
| φ1 | 0.85034 | 0.85 | 0.075 | 0.5532 |
| φ2 | 1.0 | 0.85616 | 0.0828 | 0.4403 |
| Gauge | X (m) | Y (m) | Z (m) |
|---|---|---|---|
| WG1 | 45.00 | 0.60 | - |
| WG2 | 50.65 | 0.60 | - |
| WG3 | 45.00 | 2.50 | - |
| WG4 | 50.65 | 2.50 | - |
| WG5 | 14.00 | 2.50 | - |
| VG1 | 50.65 | 4.40 | 2.60 |
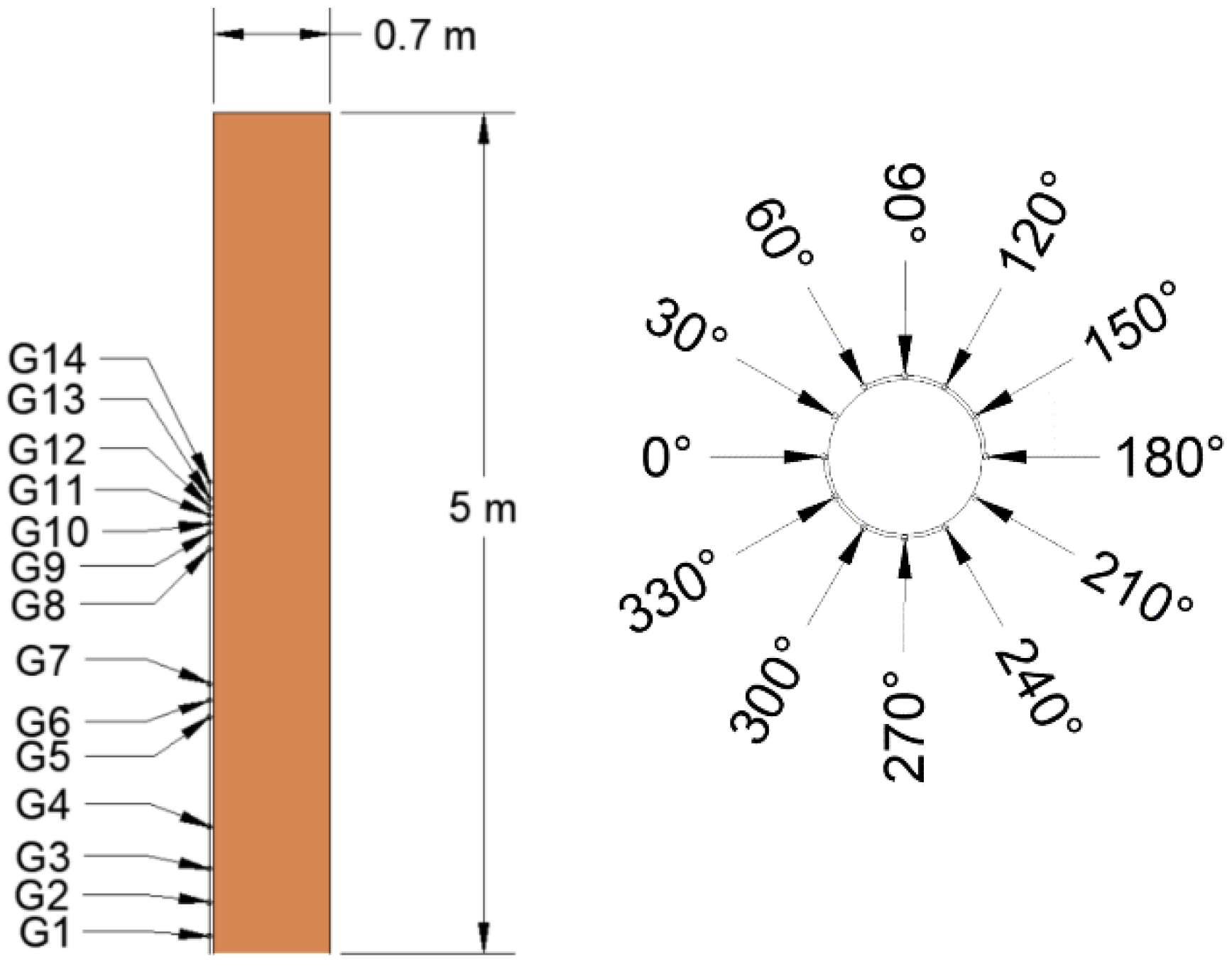
| Gauge Number | X (m) | Y (m) | Z (m) | Distance from the Slope |
|---|---|---|---|---|
| G1 | 50.98125 | 2.49375 | 2.40625 | Near-bottom height |
| G2 | 50.98125 | 2.49375 | 2.60625 | |
| G3 | 50.98125 | 2.49375 | 2.80625 | |
| G4 | 50.98125 | 2.49375 | 3.05625 | Half-distance between the slope and free surface |
| G5 | 50.98125 | 2.49375 | 3.70625 | Near the free surface height |
| G6 | 50.98125 | 2.49375 | 3.80625 | |
| G7 | 50.98125 | 2.49375 | 3.90625 | |
| G8 | 50.98125 | 2.49375 | 4.70625 | At wave-breaking height |
| G9 | 50.98125 | 2.49375 | 4.80625 | |
| G10 | 50.98125 | 2.49375 | 4.85625 | |
| G11 | 50.98125 | 2.49375 | 4.90625 | |
| G12 | 50.98125 | 2.49375 | 4.95625 | |
| G13 | 50.98125 | 2.49375 | 5.00625 | |
| G14 | 50.98125 | 2.49375 | 5.10625 |
| Degrees | X (m) | Y (m) | Z (m) |
|---|---|---|---|
| 0° | 50.98125 | 2.49375 | - |
| 30° | 51.03065 | 2.68438 | - |
| 60° | 51.16563 | 2.81935 | - |
| 90° | 51.34375 | 2.86875 | - |
| 120° | 51.53438 | 2.81935 | - |
| 150° | 51.66935 | 2.68438 | - |
| 180° | 51.71875 | 2.49375 | - |
| 210° | 51.66935 | 2.31563 | - |
| 240° | 51.53438 | 2.18065 | - |
| 270° | 51.34375 | 2.13125 | - |
| 300° | 51.16563 | 2.18065 | - |
| 330° | 51.03065 | 2.31563 | - |
| H (m) | T (s) | α (deg) | L (m) | ξ | Type of Breaker |
|---|---|---|---|---|---|
| 1.3 | 4.0 | 5.71 | 20.53 | 0.397 < 0.5 | Spilling |
| Inlet | Outlet | Slope/Ground/Substructure | Sides | Top | |
|---|---|---|---|---|---|
| U | Wave Velocity | Wave Velocity | Fixed Value | Slip | Pressure Inlet Outlet Velocity |
| Prgh | Fixed Flux Pressure | Fixed Flux Pressure | Fixed Flux Pressure | Fixed Flux Pressure | Total Pressure |
| Alpha | waveAlpha | Zero Gradient | Zero Gradient | Zero Gradient | Zero Gradient |
| K | Zero Gradient | Zero Gradient | Kqr Wall Function | Slip | Inlet Outlet |
| Omega | Inlet Outlet | Inlet Outlet | Omega Wall Function | Slip | Inlet Outlet |
| Nut | Calculated | Calculated | Nutk Wall Function | Slip | Calculated |
| Case | Simulation | Cells | Wave Generation | Near Substructure |
|---|---|---|---|---|
| 1 | Conical substructure | 4,017,940 | 0.1 × 0.1 × 0.1 m3 | 0.0125 × 0.0125 × 0.0125 m3 |
| 2 | Cylindrical substructure 0.7 m | 3,764,981 | 0.1 × 0.1 × 0.1 m3 | 0.0125 × 0.0125 × 0.0125 m3 |
| 3 | Cylindrical substructure 0.9 m | 4,111,755 | 0.1 × 0.1 × 0.1 m3 | 0.0125 × 0.0125 × 0.0125 m3 |
| Wave Gauge | Dimensionless Distance from the Wave Generation | Mean Peak Height (m) | Mean Trough Height (m) | Mean Incident Wave Height (m) | Difference from the Theoretical Value (%) |
|---|---|---|---|---|---|
| WG1 | 0.5625 | 0.8918 | −0.3844 | 1.2762 | 1.83 |
| WG2 | 0.5625 | 0.8658 | −0.3771 | 1.2443 | 4.39 |
| WG3 | 0.6331 | 0.9402 | −0.3782 | 1.3183 | 1.41 |
| WG4 | 0.6331 | 0.9983 | −0.3721 | 1.3704 | 5.41 |
| WG5 | 0.1750 | 0.7591 | −0.4231 | 1.1910 | 8.39 |
| Wave Gauge | Mean Peak Height (m) | Mean Trough Height (m) | Mean Incident Wave Height (m) | Difference from the Experimental Value (%) |
|---|---|---|---|---|
| WG3 | 0.9403 | −0.3636 | 1.3040 | 6.00% |
| WG4 | 0.9967 | −0.3738 | 1.3706 | 1.20% |
| [5] | 0.9581 | −0.4290 | 1.3871 | - |
| [8] | 0.9841 | −0.4200 | 1.4042 | 1.23% |
| Wave Gauge | Mean Peak Velocity (m/s) | Mean Trough Height (m/s) | Mean Wave Velocity (m/s) | Difference (%) |
|---|---|---|---|---|
| VG1 | 1.0546 | −1.0496 | 1.0521 | 4.32% |
| [8] | 1.1335 | −1.0656 | 1.0996 | - |
| Simulation | Maximum Velocity at 38.2 s (m/s) | Difference (%) | Maximum Velocity at 38.3 s (m/s) | Difference (%) |
|---|---|---|---|---|
| At Gauge 2 height—Near the bottom | ||||
| Case 1 | 1.288 | 41.640 | 1.739 | 25.490 |
| Case 2 | 2.207 | - | 2.334 | - |
| Case 3 | 1.853 | 16.040 | 2.199 | 5.780 |
| At Gauge 6 height—Near the free surface | ||||
| Case 1 | 2.645 | 16.690 | 3.234 | 7.920 |
| Case 2 | 3.175 | - | 3.512 | - |
| Case 3 | 3.060 | 3.620 | 3.397 | 3.270 |
| At Gauge 8 height—Near the wave breaking | ||||
| Case 1 | 5.596 | 0.420 | 4.918 | 4.020 |
| Case 2 | 5.573 | - | 4.728 | - |
| Case 3 | 5.676 | 1.850 | 4.681 | 1.010 |
| Simulation | Maximum Pressure at 38.2 s (Pa) | Difference (%) | Maximum Pressure at 38.3 s (Pa) | Difference (%) |
|---|---|---|---|---|
| At Gauge 2 height—Near the bottom | ||||
| Case 1 | 44,102.0 | 2.010 | 43,793.0 | 1.640 |
| Case 2 | 43,233.0 | - | 43,086.0 | - |
| Case 3 | 43,591.0 | 0.830 | 43,273.0 | 0.430 |
| At Gauge 6 height—Near the free surface | ||||
| Case 1 | 47,717.0 | 1.920 | 46,806.0 | 1.830 |
| Case 2 | 46,816.0 | - | 45,963.0 | - |
| Case 3 | 47,267.0 | 0.960 | 46,132.0 | 0.370 |
| At Gauge 8 height—Near the wave breaking | ||||
| Case 1 | 53,077.5 | 2.380 | 51,908.3 | 3.050 |
| Case 2 | 54,371.3 | - | 50,373.3 | - |
| Case 3 | 54,674.3 | 0.560 | 50,458.2 | 0.170 |
| Simulation | Mean Value of the Primary Wave Load (N) | Difference (%) |
|---|---|---|
| Case 1 | 16,549.2 | 39.89 |
| Case 2 | 10,179.3 | 13.95 |
| Case 3 | 14,833.6 | 25.39 |
| [8] | 12,267.8 | 3.70 |
| [5] | 11,830.0 | - |
| Simulation | Magnitude of the Secondary Load (N) | Ratio of the Secondary Load to the Primary Load (%) |
|---|---|---|
| Case 1 | 1604 | 9.89 |
| Case 2 | 473 | 4.91 |
| Case 3 | 1200 | 8.37 |
| [5] | 619 | 5.16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chatzimarkou, E.; Michailides, C. A Comparative Study of Breaking Wave Loads on Cylindrical and Conical Substructures. Water 2021, 13, 924. https://doi.org/10.3390/w13070924
Chatzimarkou E, Michailides C. A Comparative Study of Breaking Wave Loads on Cylindrical and Conical Substructures. Water. 2021; 13(7):924. https://doi.org/10.3390/w13070924
Chicago/Turabian StyleChatzimarkou, Eirinaios, and Constantine Michailides. 2021. "A Comparative Study of Breaking Wave Loads on Cylindrical and Conical Substructures" Water 13, no. 7: 924. https://doi.org/10.3390/w13070924
APA StyleChatzimarkou, E., & Michailides, C. (2021). A Comparative Study of Breaking Wave Loads on Cylindrical and Conical Substructures. Water, 13(7), 924. https://doi.org/10.3390/w13070924