
Lidar and Ceilometer Observations and Comparisons of Atmospheric Cloud Structure at Nagqu of Tibetan Plateau in 2014 Summer


Abstract
:1. Introduction
2. Data and Methodology
2.1. Set Up Introduction
2.1.1. CL31
2.1.2. WACAL
2.1.3. Model GTS1 Digital Radiosonde
2.2. Methodology
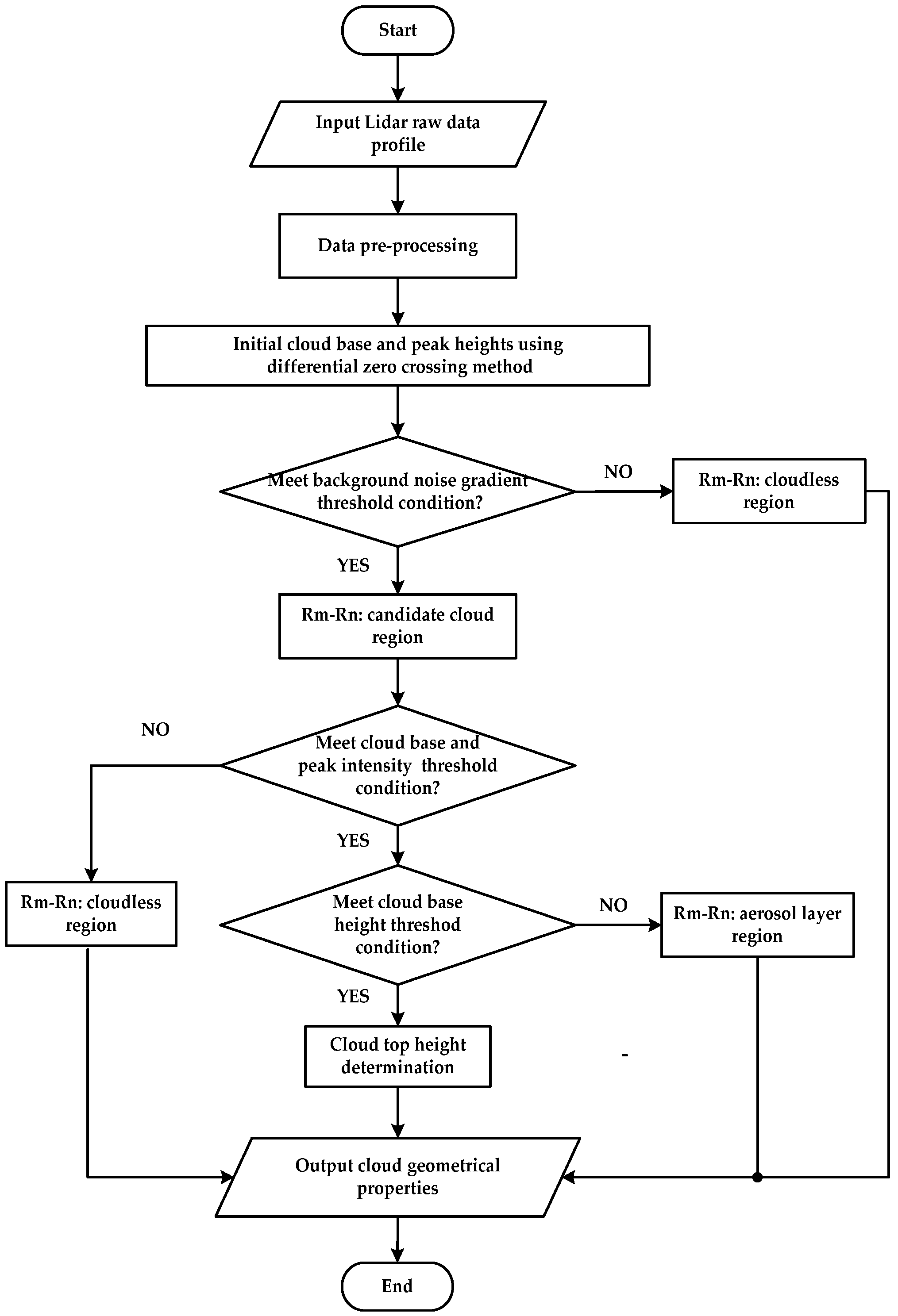
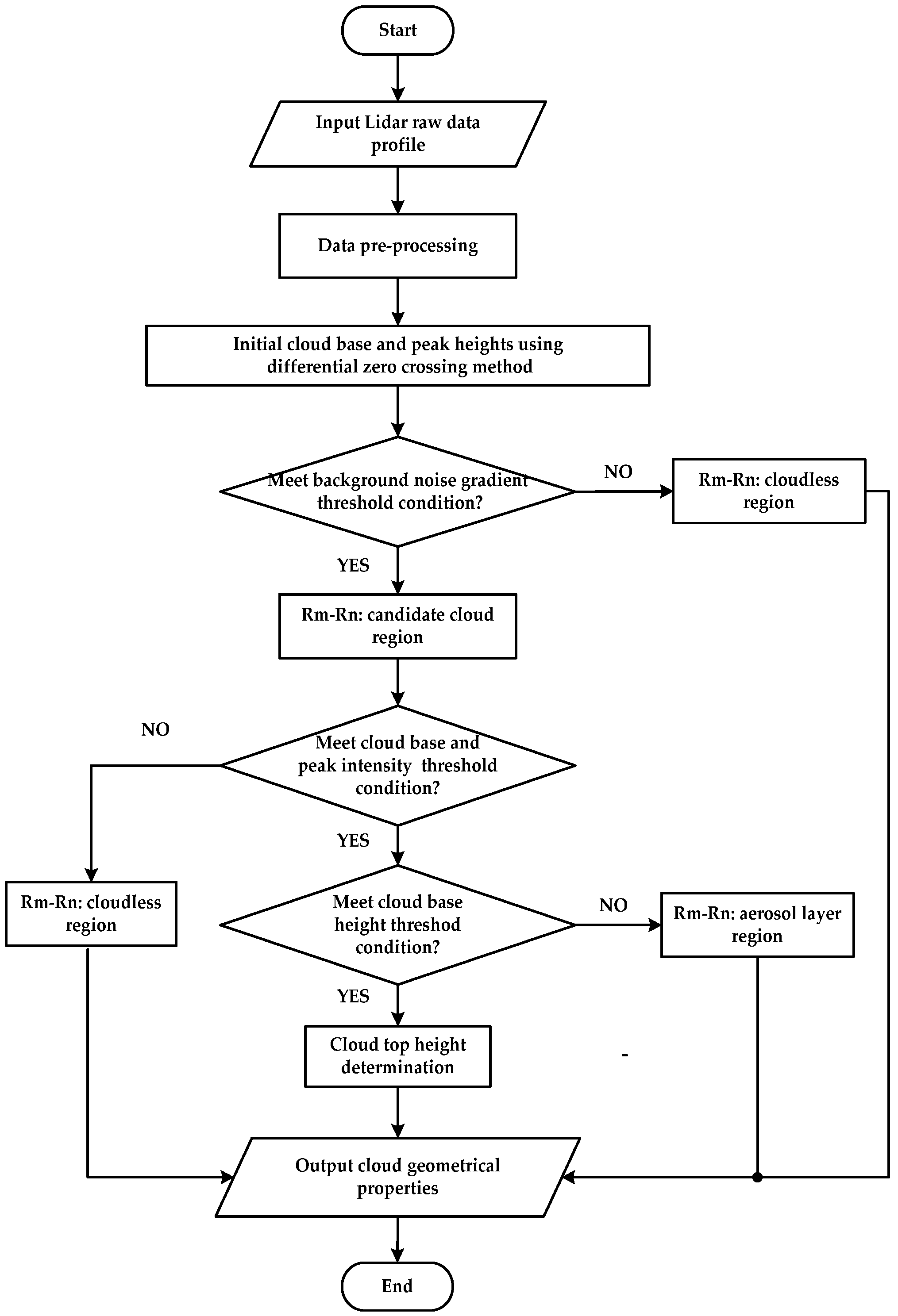
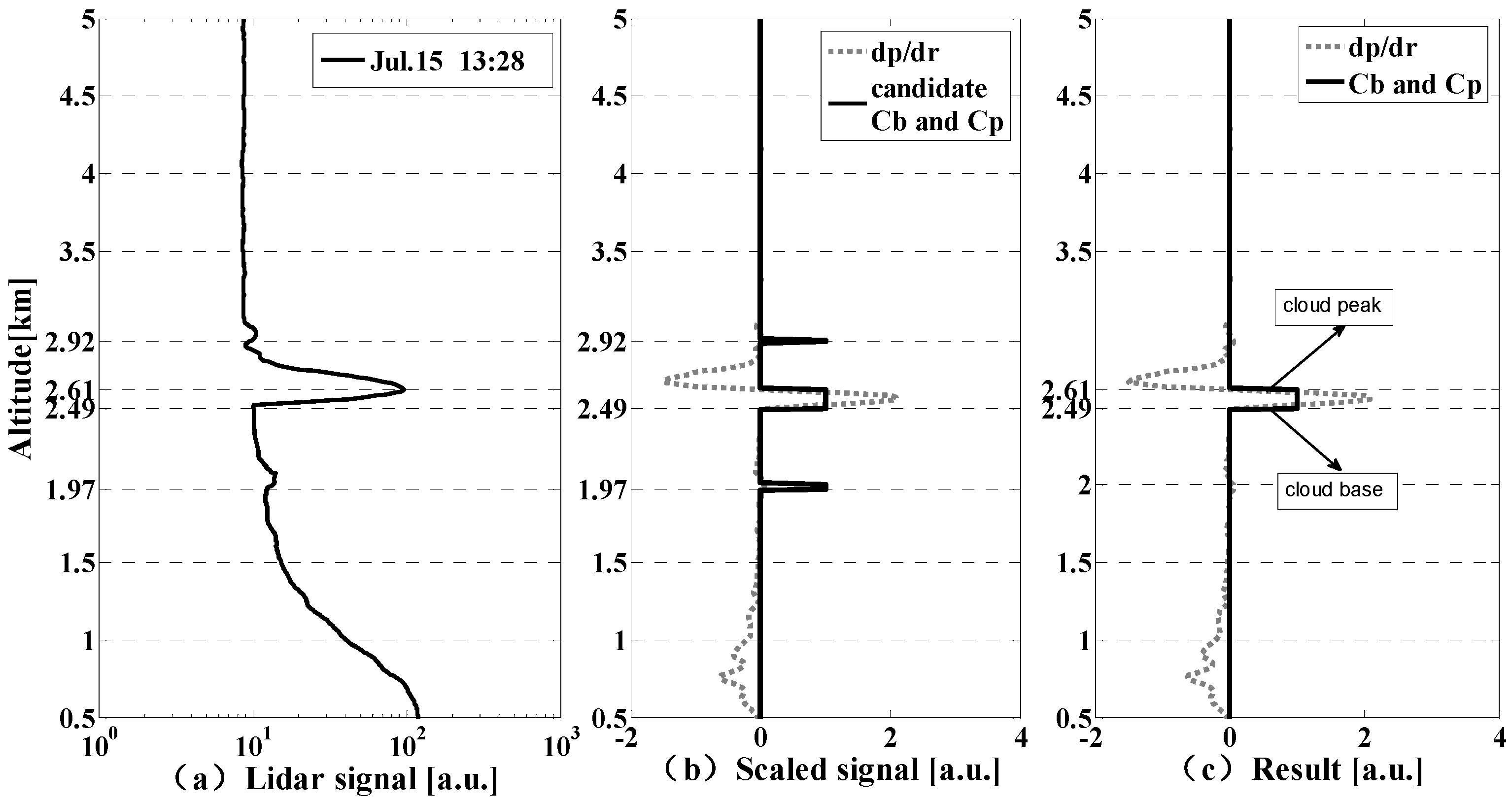
2.2.1. Improved Differential Zero-Crossing Method Using WACAL
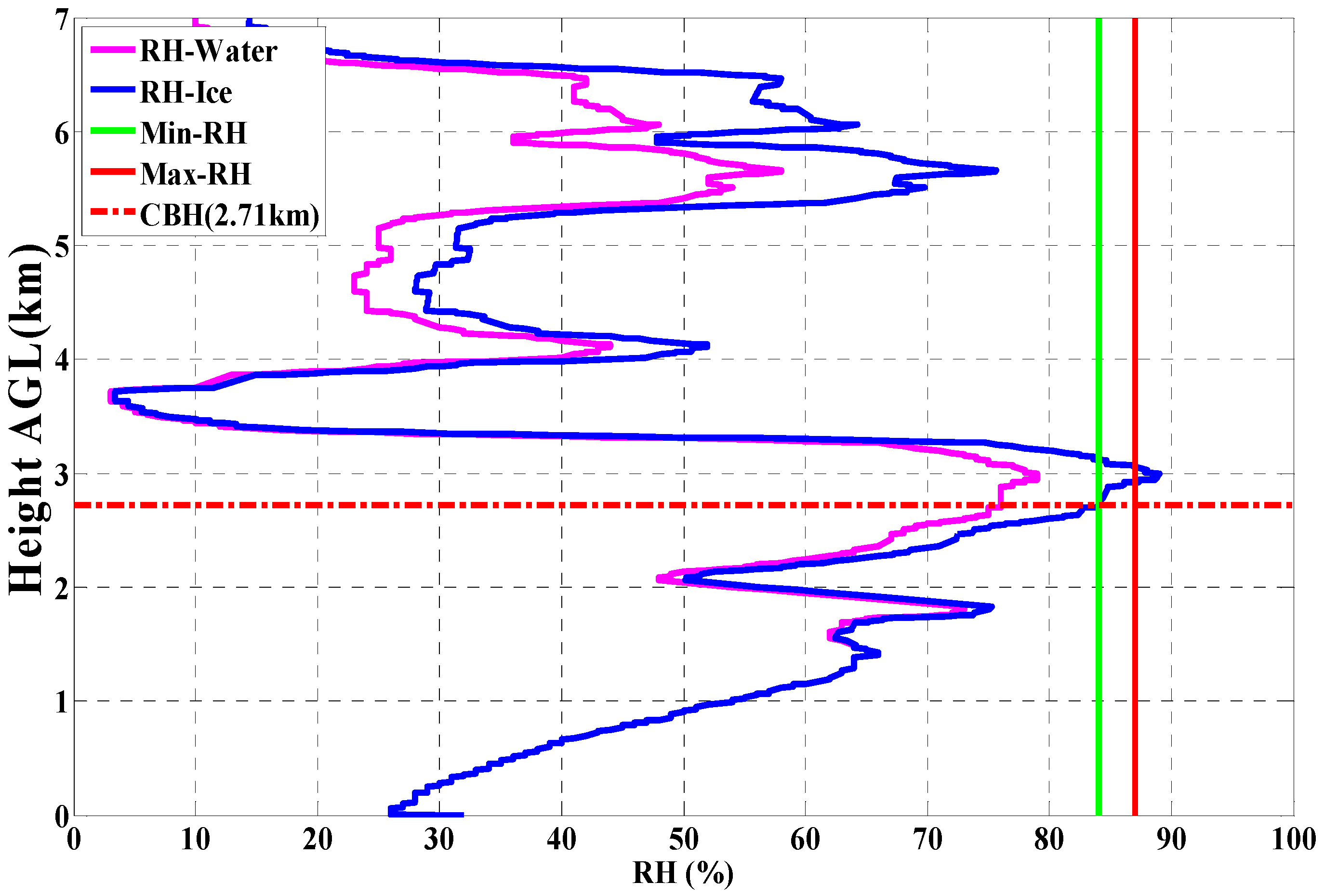
2.2.2. Relative Humidity (RH) Threshold Method Using Radiosonde
3. Results
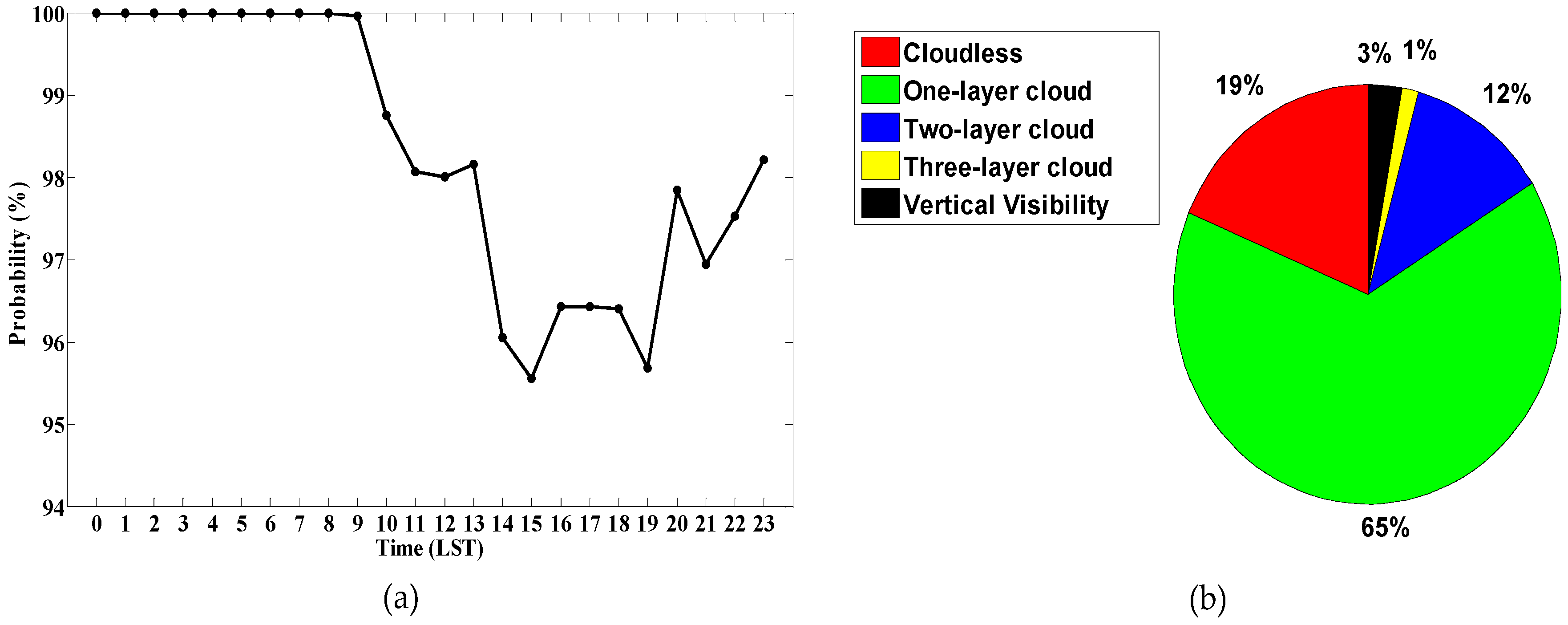
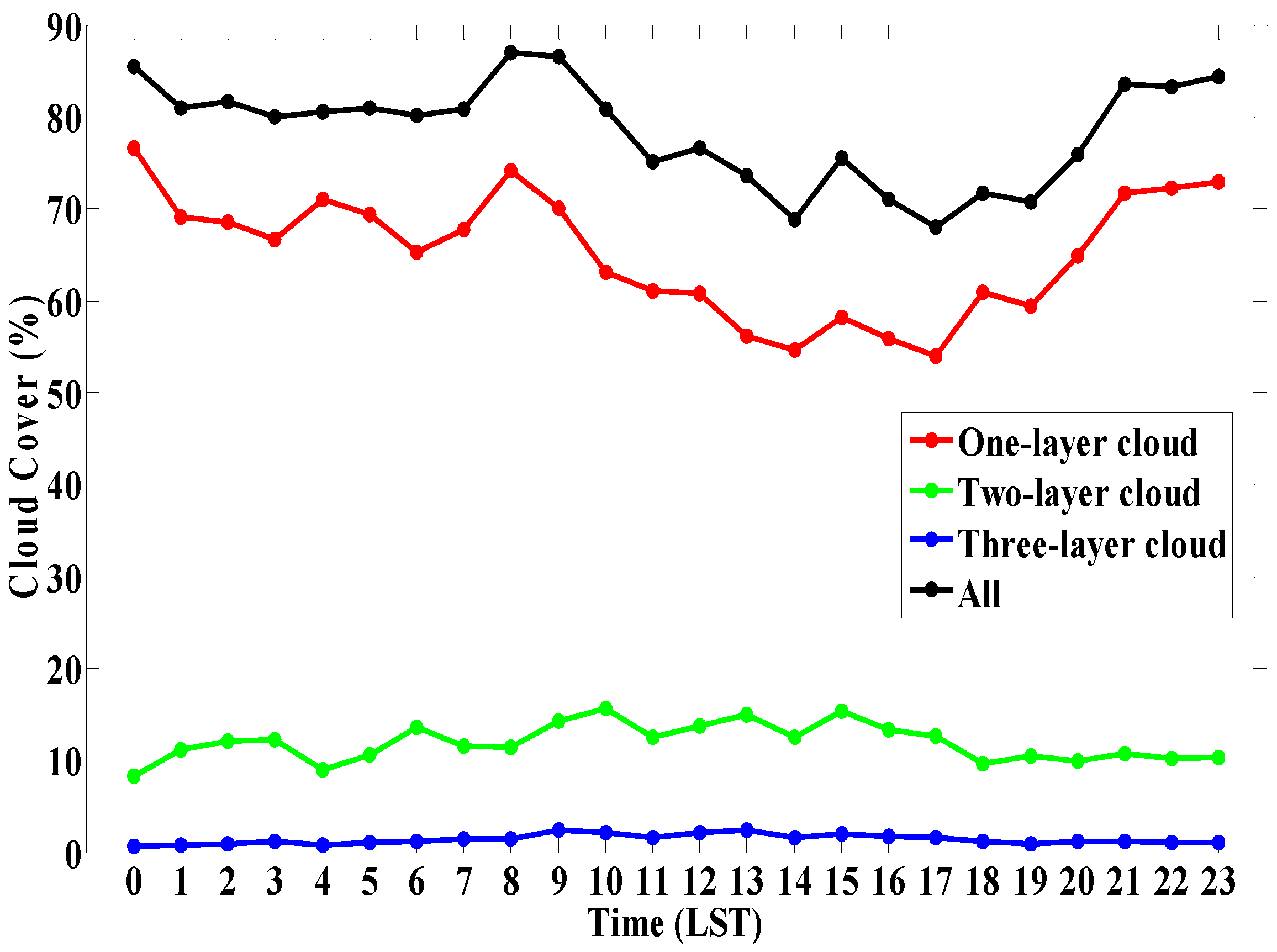
3.1. Cloud Characteristics Statistics of CL31
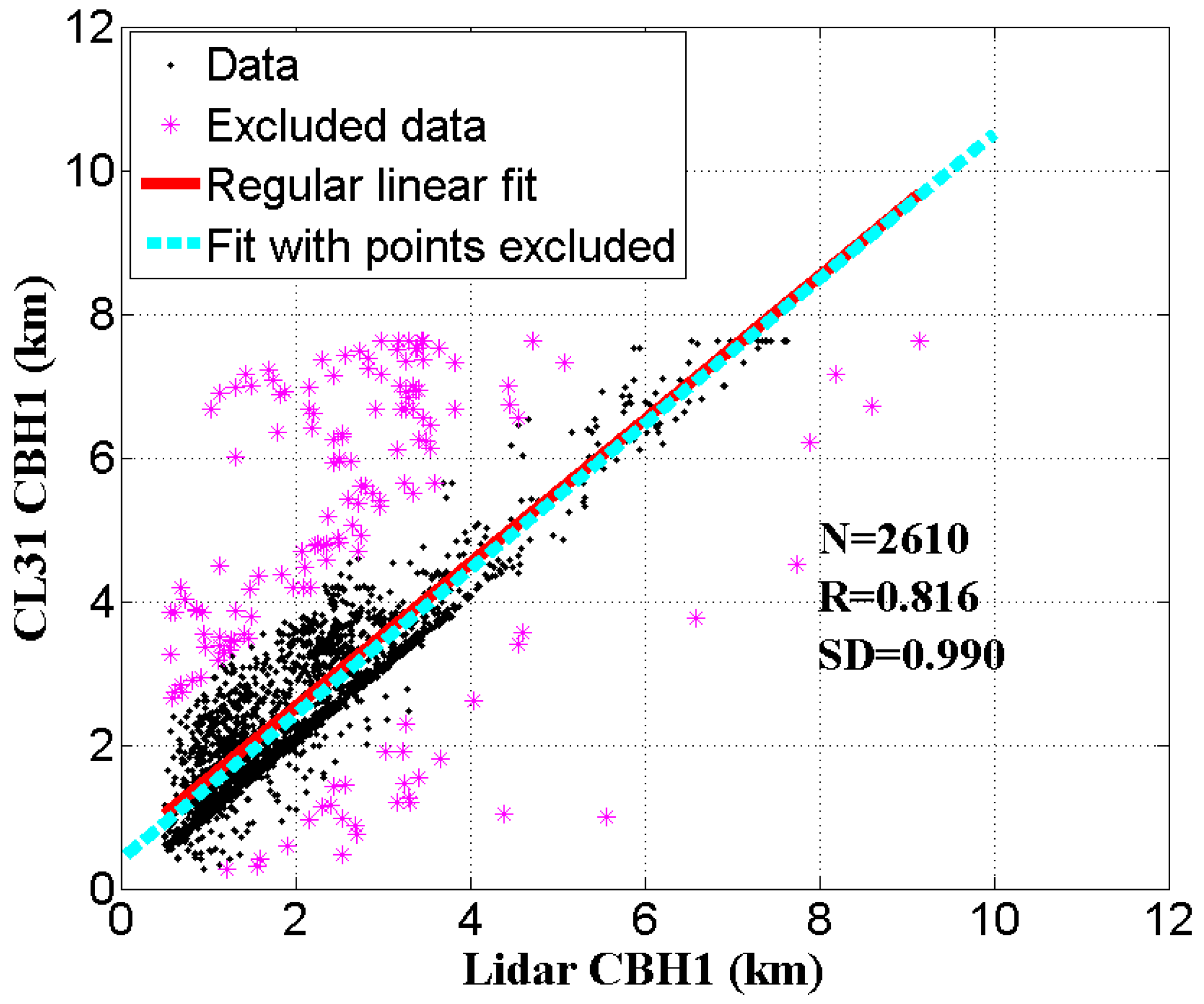
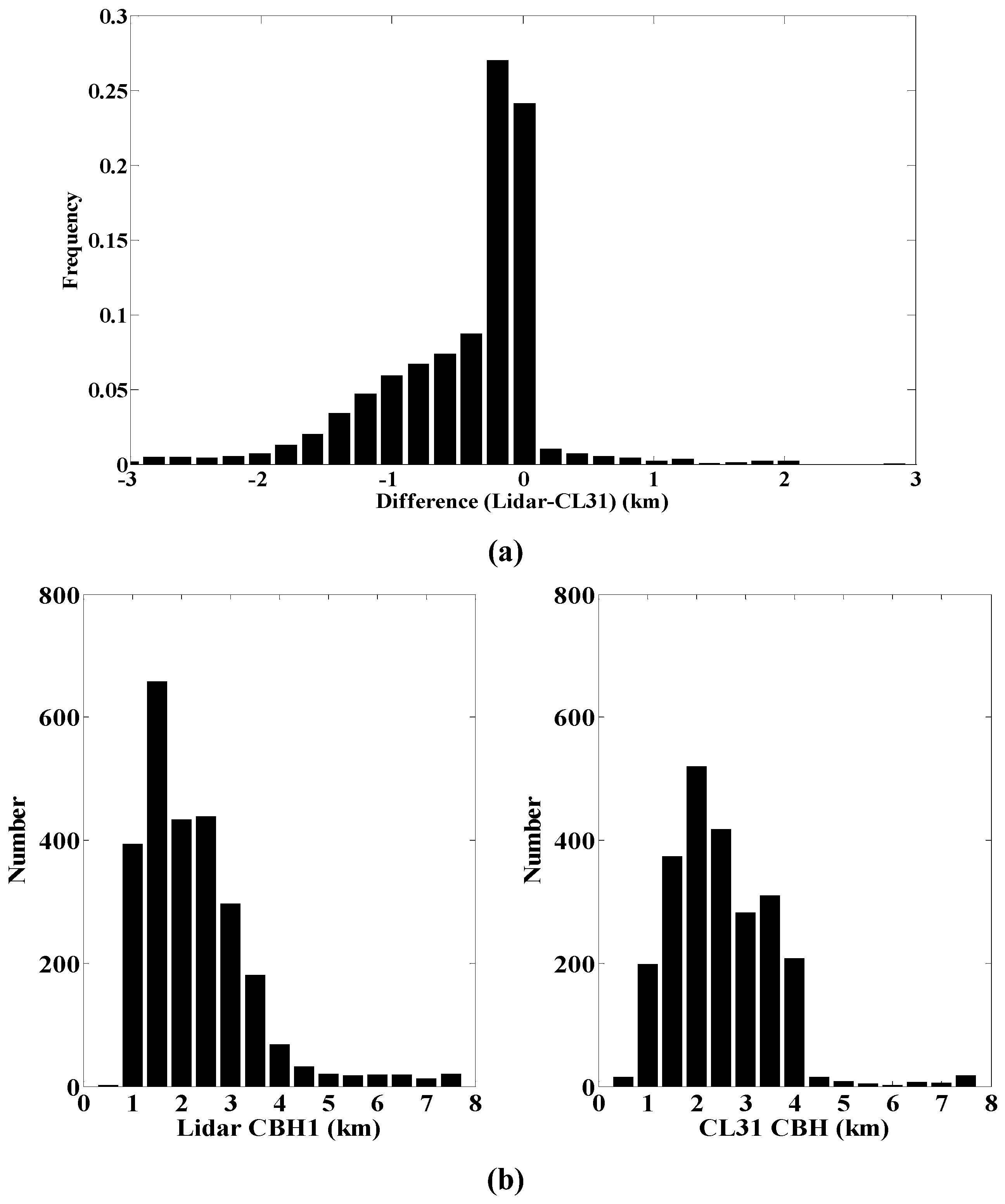
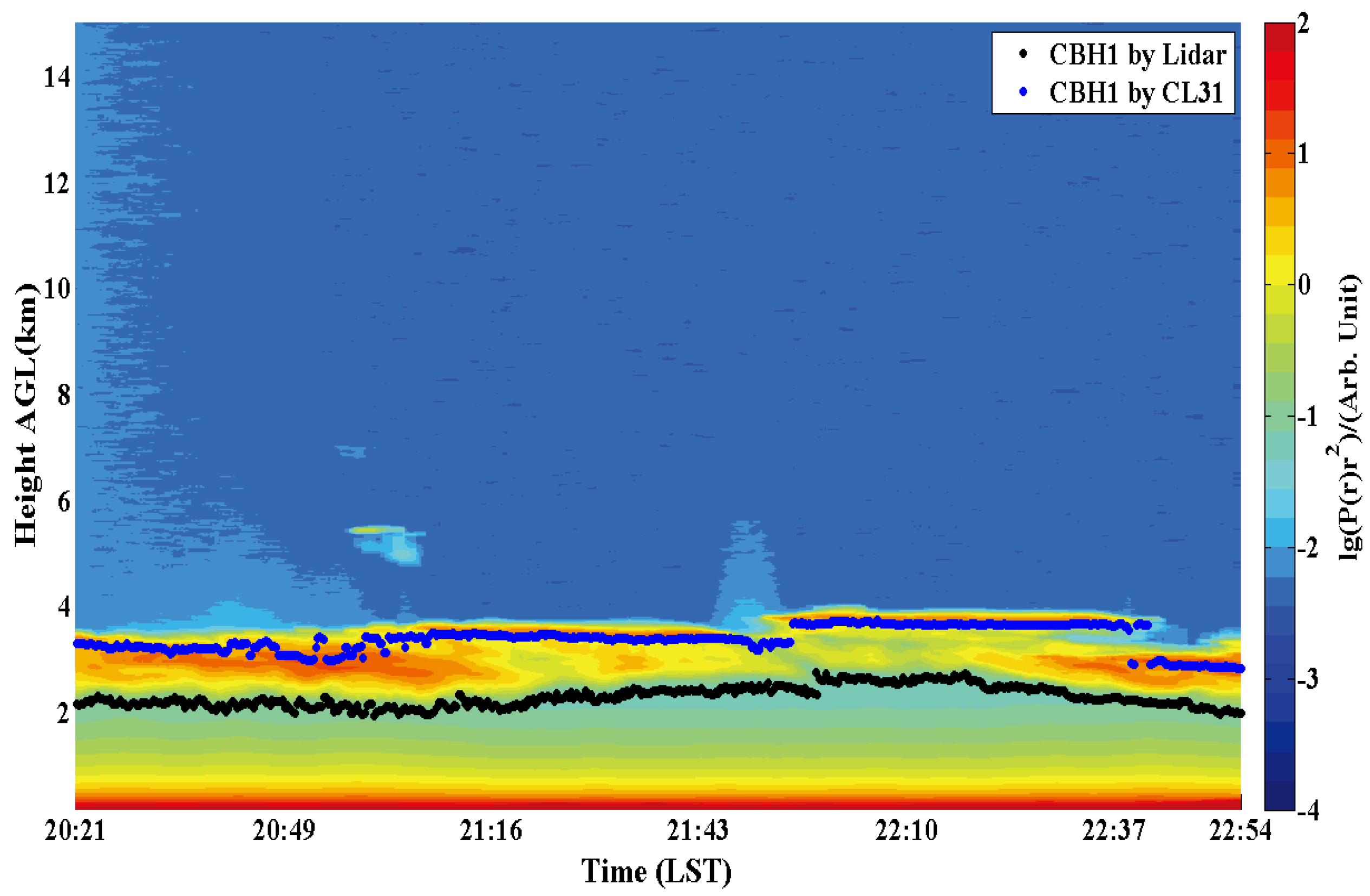
3.2. CBH Comparison between CL31 and WACAL
4. Discussion
4.1. Cloud Characteristics Diurnal Variation Comparison between CL31 and WACAL
4.2. Cloud Characteristics Statistics of WACAL
5. Conclusions
- (1)
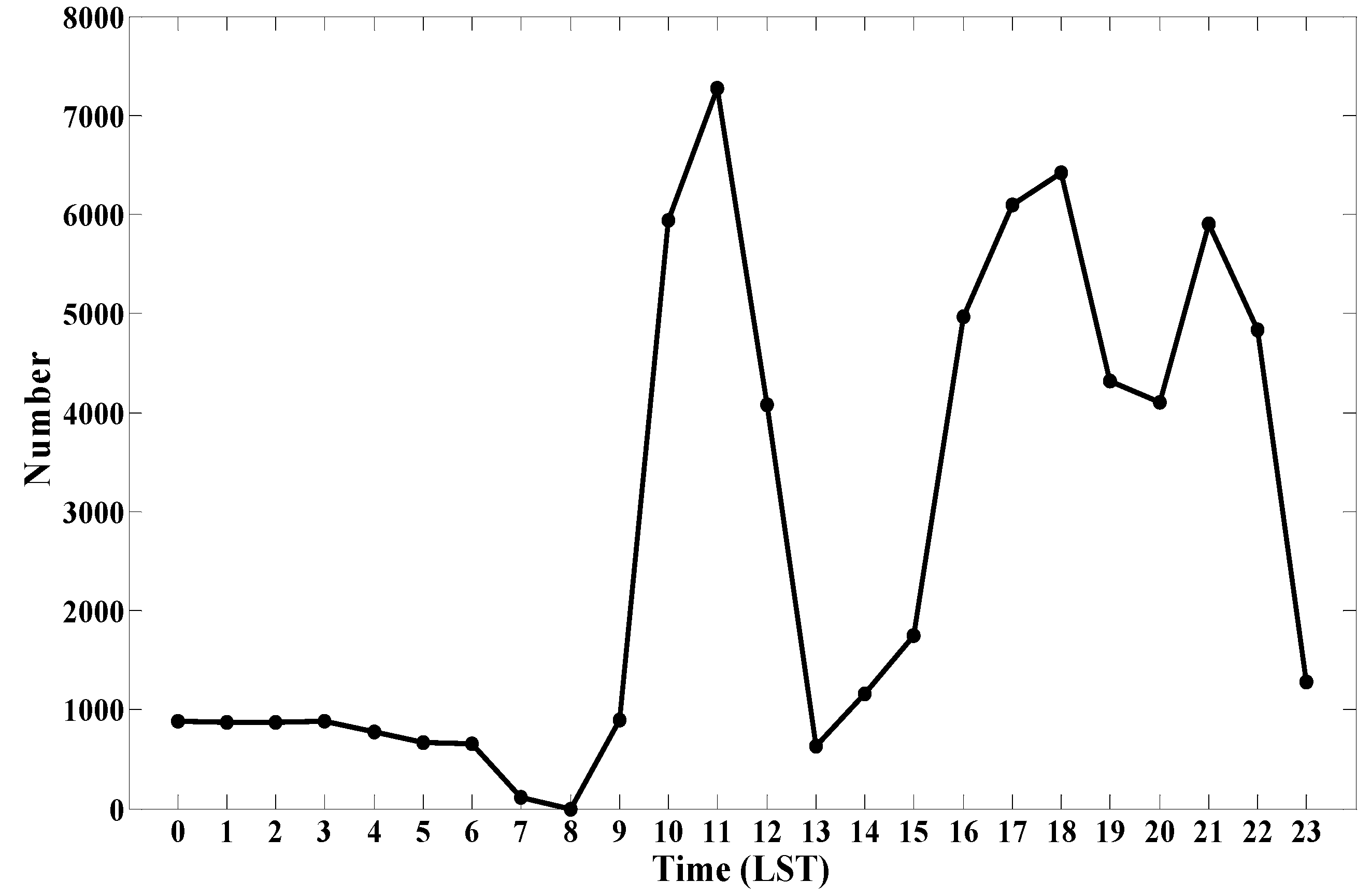
- The cloud occurrence at Nagqu is about 81% during the CL31 experimental period with obviously diurnal variation. The cloud structure is relatively simple with a majority of single-layer cloud.
- (2)
- It can be found from the CBH comparison between CL31 and WACAL that the cases with obvious deviation may result from the different cloud layer detection from these two devices. The CL31 sometimes overestimates the CBH compared with WACAL’s on the premise that the same cloud layer is analyzed, which may be the result of the difference on the CBH definition and retrieval methods, and this phenomenon has also been validated by synchronous radiosonde result.
- (3)
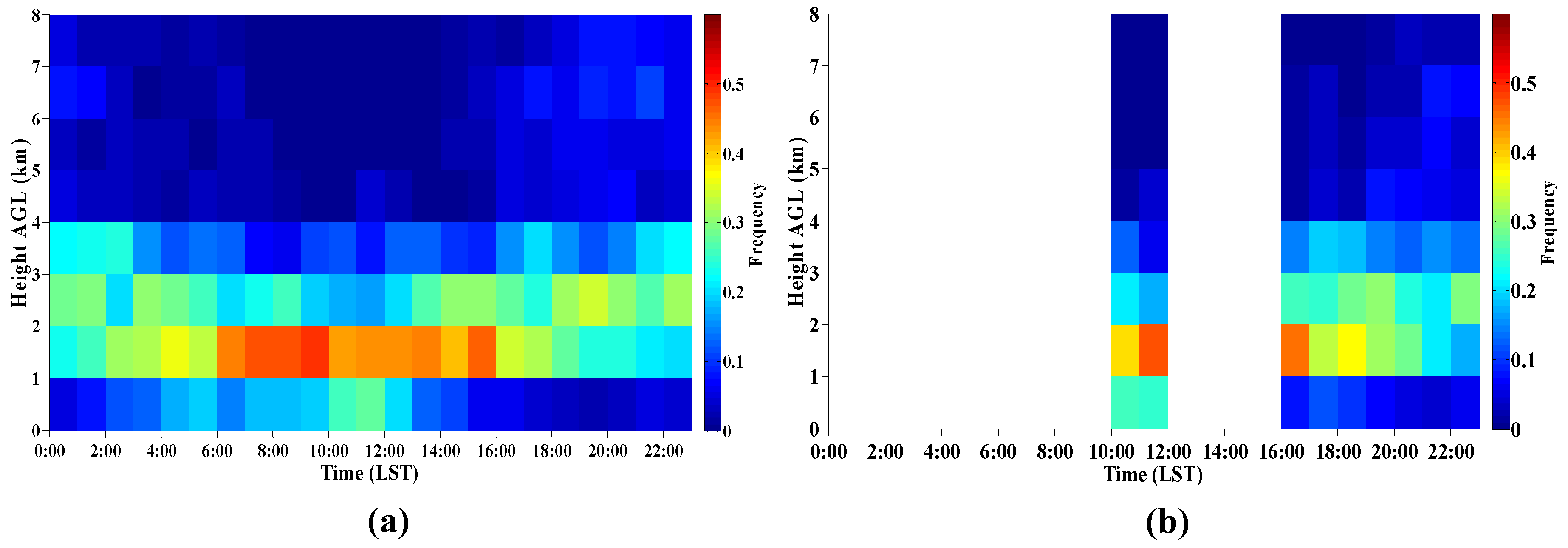
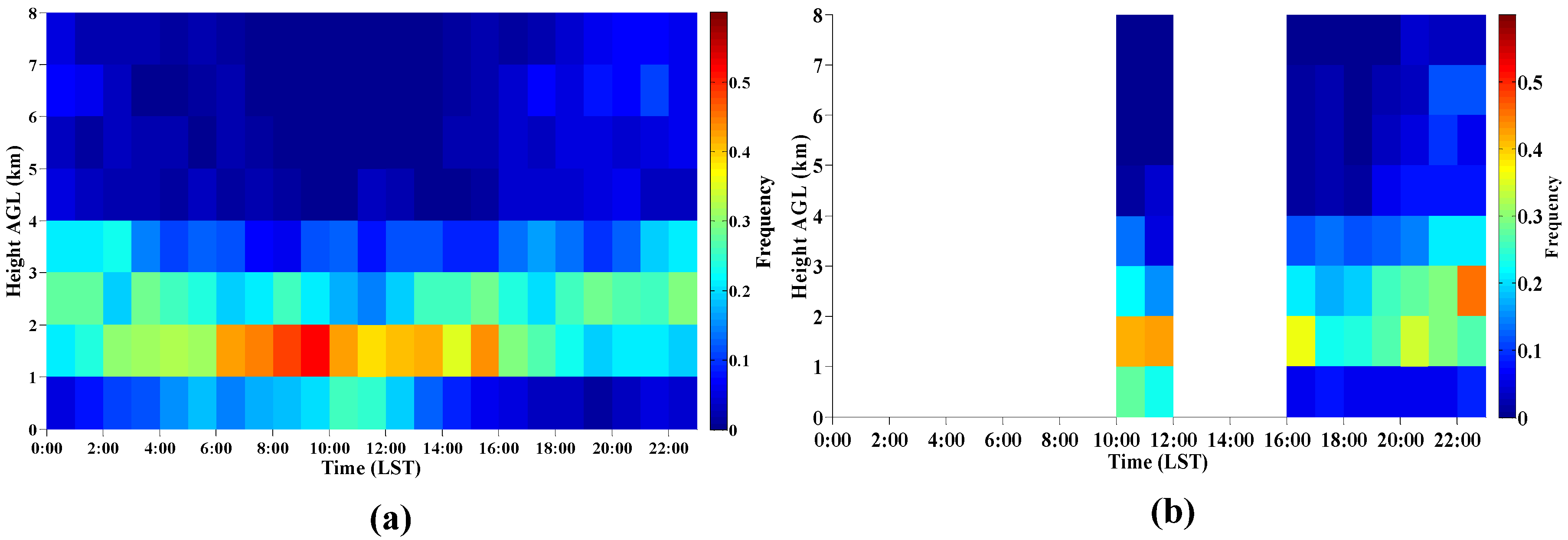
- The diurnal variations of CBH distribution proportion and CBH frequency from CL31 observation have a similar variation trend with a distinct “U” shape, which analyze the cloud structure variation at spatial and temporal aspects, respectively. In addition, in the time snippet comparison between CL31 and WACAL, the results from these two devices have a good consistency in distribution range, variation trend, the corresponding high value area and so forth.
- (4)
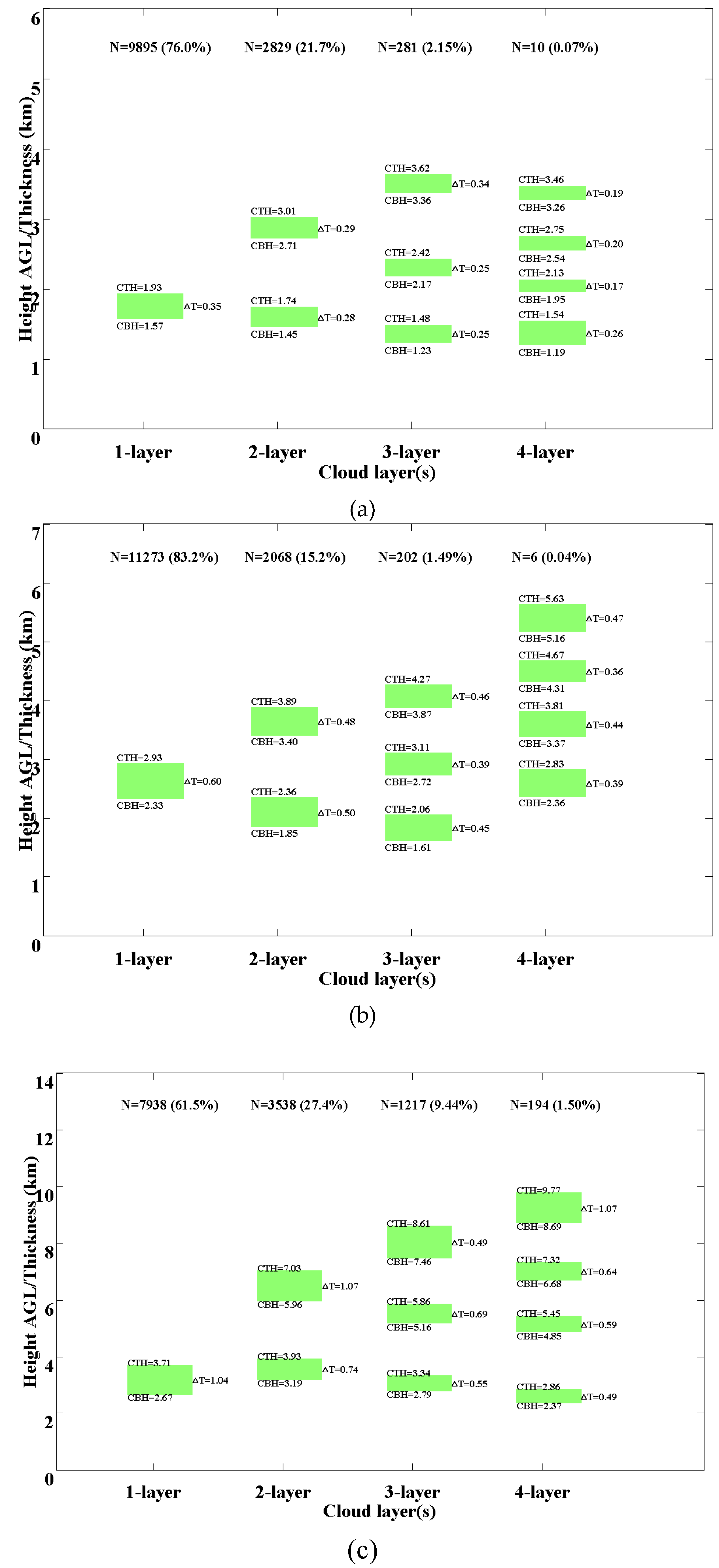
- The WACAL compares the averaged spatial distribution of one-, two-, three-, and four-layer clouds from three different time periods, corresponding to different cloud development processes. The averaged cloud thickness and vertical distribution range at night is about 2.5–2.9 times and 2.4–3.3 times as much as the clouds in the forenoon, and the occurrence frequency of multi-layer cloud increases from 24% in the forenoon to 39% at night. Generally, the cloud development has a distinct diurnal variation with a thicker, wider, and more abundant cloud structure process.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Myhre, G.; Samset, B.H.; Schulz, M.; Balkanski, Y.; Bauer, S.; Berntsen, T.K.; Bian, H.; Bellouin, N.; Chin, M.; Diehl, T.; et al. Radiative forcing of the direct aerosol effect from AeroCom Phase II simulations. Atmos. Chem. Phys. 2013, 13, 1853–1877. [Google Scholar] [CrossRef]
- Su, W.Y.; Loeb, N.G.; Schuster, G.L.; Chin, M.; Rose, F.G. Global all-sky shortwave direct radiative forcing of anthropogenic aerosols from combined satellite observations and GOCART simulations. J. Geophys. Res. Atmos. 2013, 118, 655–669. [Google Scholar] [CrossRef]
- Zelinka, M.D.; Dennis, L.H. Why is longwave cloud feedback positive? J. Geophys. Res. Atmos. 2010, 115, D16117. [Google Scholar] [CrossRef]
- Espinoza, H.R. Simple parameterizations of the radiative properties of cloud layers: A review. Atmos. Res. 1995, 35, 113–125. [Google Scholar] [CrossRef]
- Cess, R.D.; Potter, G.L.; Blanchet, J.P.; Boer, G.J.; Ghan, S.J.; Kiehl, J.T.; Treut, H.L.; Li, Z.X.; Liang, X.Z.; Mitchell, J.F.B.; et al. Interpretation of cloud-climate feedback as produced by 14 atmospheric general circulation models. Science 1989, 245, 513–516. [Google Scholar] [CrossRef] [PubMed]
- Stephens, G.L. Cloud feedbacks in the climate system: A critical review. J. Clim. 2005, 18, 237–273. [Google Scholar] [CrossRef]
- Jian, M.Q.; Luo, H.B. Impact of the diurnal variation of the surface heating in the Tibetan Plateau on the general circulation over the Asian monsoon region. J. Trop. Meteorol. 2002, 18, 269–275. [Google Scholar]
- Ye, D.Z.; Gao, Y.X. Qinghai-Xizang Plateau Meteorology, 1st ed.; Science Press: Beijing, China, 2002; pp. 1–278. [Google Scholar]
- Wang, H.; Luo, Y.L.; Zhang, R.R. Analyzing seasonal variation of clouds over the Asian monsoon regions and the Tibetan Plateau region using CloudSat/CALIPSO. Chin. J. Atmos. Sci. 2011, 35, 1117–1131. [Google Scholar]
- Zhao, Y.F.; Wang, D.H.; Yin, J.F. A study on cloud microphysical characteristics over the Tibetan Plateau using CloudSat data. J. Trop. Meteorol. 2014, 30, 239–248. [Google Scholar]
- Fu, Y.F.; Li, H.T.; Zi, Y. Case study of precipitation cloud structure viewed by TRMM satellite in a valley of Tibetan Plateau. Plateau Meteorol. 2007, 26, 98–106. [Google Scholar]
- Spinhirne, J.D. Micro pulse lidar. IEEE Trans. Geosci. Remote Sens. 1993, 31, 48–55. [Google Scholar] [CrossRef]
- Liu, L.P.; Zheng, J.F.; Ruan, Z.; Cui, Z.H.; Hu, Z.Q.; Wu, S.H.; Dai, G.Y.; Wu, Y.H. The preliminary analyses of the cloud properties over the Tibetan Plateau from the field experiments in clouds precipitation with the various radar. Acta Meteorol. Sin. 2015, 73, 635–647. [Google Scholar]
- He, Q.S.; Li, C.C.; Ma, J.Z.; Wang, H.Q.; Shi, G.M.; Liang, Z.R.; Luan, Q.; Geng, F.H.; Zhou, X.W. The properties and formation of cirrus clouds over the Tibetan Plateau based on summertime lidar measurements. J. Atmos. Sci. 2013, 70, 901–915. [Google Scholar] [CrossRef]
- Liu, C. Measurements of the Aerosol over Nagqu of Tibet and Suburb of Beijing by Micro Pulse Lidar (MPL). J. Photon. Study 2006, 35, 1435–1439. [Google Scholar]
- Yanai, M.; Li, C.; Song, Z. Seasonal heating of the Tibetan Plateau and its effects on the evolution of the Asian summer monsoon. J. Meteorol. Soc. Jpn. 1992, 70, 319–351. [Google Scholar]
- Vaisala Ceilometer CL31. Available online: https://sensorexperts.com/node/221729 (accessed on 21 April 2016).
- Wu, S.H.; Song, X.Q.; Liu, B.Y.; Dai, G.Y.; Liu, J.T.; Zhang, K.L.; Qin, S.G.; Hua, D.X.; Gao, F.; Liu, L.P. Mobile multi-wavelength polarization Raman lidar for water vapor, cloud and aerosol measurement. Opt. Express 2015, 23, 33870–33892. [Google Scholar] [CrossRef] [PubMed]
- GTS1 Digital Radiosonde. Available online: http://www.docin.com/p-1209358545.html (accessed on 21 April 2016).
- Winker, D.M.; Vaughan, M.A. Vertical distribution of clouds over Hampton, Virginia observed by lidar under the ECLIPS and FIRE ETO programs. Atmos. Res. 1994, 34, 117–133. [Google Scholar] [CrossRef]
- Pal, S.R.; Steinbrecht, W.; Carswell, A.I. Automated method for lidar determination of cloud-base height and vertical extent. Appl. Opt. 1992, 31, 1488–1494. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.P.; Song, X.Q.; Yan, B.D.; Chen, C.; Liu, B.Y.; Wu, S.H. Research on the observation of cloud-base height for the city of Zhuhai of China with lidar. J. Optoelectron. Laser 2013, 11, 2192–2197. [Google Scholar]
- Wang, J.; Rossow, W.B. Determination of cloud vertical structure from upper-air observations. J. Appl. Meteorol. 1995, 34, 2243–2258. [Google Scholar] [CrossRef]
- Zhang, J.Q.; Chen, H.B.; Li, Z.Q.; Fan, X.H.; Peng, L.; Yu, Y.; Cribb, M. Analysis of cloud layer structure in Shouxian, China using RS92 radiosonde aided by 95 GHz cloud radar. J. Geophys. Res. Atmos. 2010, 115, D00K30. [Google Scholar] [CrossRef]
- Wang, J.; Rossow, W.B.; Uttal, T.; Rozendaal, M. Variability of cloud vertical structure during ASTEX observed from a combination of rawinsonde, radar, ceilometer, and satellite. Mon. Weather Rev. 1999, 127, 2482–2502. [Google Scholar] [CrossRef]
- Goff, J.A.; Gratch, S. Low-pressure properties of water from −160 to 212 F. Trans. Am. Soc. Heat. Vent. Eng. 1946, 51, 125–164. [Google Scholar]
- Alduchov, O.A.; Eskridge, R.E. Improved Magnus form approximation of saturation vapor pressure. J. Appl. Meteorol. 1996, 35, 601–609. [Google Scholar] [CrossRef]
- Eberhard, W.L. Cloud signals from lidar and rotating beam ceilometer compared with pilot ceiling. J. Atmos. Ocean. Technol. 1986, 3, 499–512. [Google Scholar] [CrossRef]
- Feister, U.; Möller, H.; Sattler, T.; Shields, J.; Görsdorf, U.; Güldner, J. Comparison of macroscopic cloud data from ground-based measurements using VIS/NIR and IR instruments at Lindenberg, Germany. Atmos. Res. 2010, 96, 395–407. [Google Scholar] [CrossRef]
- Liu, L.; Sun, X.J.; Liu, X.C.; Gao, T.C.; Zhao, S.J. Comparison of Cloud Base Height Derived from a Ground-Based Infrared Cloud Measurement and Two Ceilometers. Adv. Meteorol. 2015, 2015, 853861. [Google Scholar] [CrossRef]
- Van Tricht, K.; Gorodetskaya, I.V.; Lhermitte, S.; Turner, D.D.; Schween, J.H.; Van Lipzig, N.P.M. An improved algorithm for polar cloud-base detection by ceilometer over the ice sheets. Atmos. Meas. Tech. 2014, 7, 1153–1167. [Google Scholar] [CrossRef]
- Wang, B.M.; Liu, X.N. The cloud diurnal variation in China. In Cloud Distribution of China, 1st ed.; Chen, H., Ed.; China Meteorological Press: Beijing, China, 2009; Volume 8, pp. 82–106. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | CL31 | WACAL |
|---|---|---|
| Laser type | InGaAs diode | Nd:YAG |
| Wavelength (nm) | 910 | 354.7/532/1064 |
| Pulse energy (mJ) | 0.0012 | 410/120/700 |
| Repetition rate (kHz) | 10 | 0.03 |
| Telescope/aperture (mm) | Single Lens/96 | Light Bridge/304.8 |
| Detection range (km) | 0–7.6 | 0.05–25 |
| Range resolution (m) | 5 | 3.75 |
| Temporal resolution (s) | 2–120 programmable | 1–120 programmable |
| Meteorological Sensor | Specification | Technical Parameter |
|---|---|---|
| Temperature | Range | −90–50 °C |
| Accuracy (standard deviation) | 0.2 °C (−80–50 °C) | |
| 0.3 °C (−90–−80 °C) | ||
| Resolution | 0.1 °C | |
| Humidity | Range | 0% RH~100% RH |
| Accuracy (standard deviation) | 5% RH () | |
| 10% RH () | ||
| Resolution | 1% RH | |
| Pressure | Range | 1060 hPa~5 hPa |
| Accuracy (standard deviation) | 2 hPa (1050 hPa~500 hPa) | |
| 1 hPa (500 hPa~5 hPa) | ||
| Resolution | 0.1 hPa |
| Altitude | Time Range | Threshold Value a |
|---|---|---|
| 0.5–5 km | daytime | 2–4 |
| nighttime | ||
| 5–10 km | daytime | 1–1.5 |
| nighttime | 20–30 | |
| >10 km | daytime | 1–1.5 |
| nighttime | 10–20 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, X.; Zhai, X.; Liu, L.; Wu, S. Lidar and Ceilometer Observations and Comparisons of Atmospheric Cloud Structure at Nagqu of Tibetan Plateau in 2014 Summer. Atmosphere 2017, 8, 9. https://doi.org/10.3390/atmos8010009
Song X, Zhai X, Liu L, Wu S. Lidar and Ceilometer Observations and Comparisons of Atmospheric Cloud Structure at Nagqu of Tibetan Plateau in 2014 Summer. Atmosphere. 2017; 8(1):9. https://doi.org/10.3390/atmos8010009
Chicago/Turabian StyleSong, Xiaoquan, Xiaochun Zhai, Liping Liu, and Songhua Wu. 2017. "Lidar and Ceilometer Observations and Comparisons of Atmospheric Cloud Structure at Nagqu of Tibetan Plateau in 2014 Summer" Atmosphere 8, no. 1: 9. https://doi.org/10.3390/atmos8010009
APA StyleSong, X., Zhai, X., Liu, L., & Wu, S. (2017). Lidar and Ceilometer Observations and Comparisons of Atmospheric Cloud Structure at Nagqu of Tibetan Plateau in 2014 Summer. Atmosphere, 8(1), 9. https://doi.org/10.3390/atmos8010009