
Scanning Micromirror Platform Based on MEMS Technology for Medical Application


Abstract
:1. Introduction
2. Actuation Principles
2.1. Electrostatic Actuators
2.1.1. Linear Comb Actuators
2.1.2. Vertical Comb Actuators
2.1.3. Rotary Comb Actuators
2.1.4. Parallel-Plate Actuators

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Year | Size (in mm) | Characteristics | Operating Conditions | Natural Frequency |
|---|---|---|---|---|---|
| Linear Comb Actuators | |||||
| Milanovic et al. [15] | 2001 | 0.7 mirror | ±20.8° optical (2 axis) | 90 V | 2 kHz |
| Sun et al. [11] | 2002 | 3.2 × 3.0 | 4.5 μm, 1.5 μm | 10 , 68 | - |
| Li et al. [20] | 2003 | - | 45 μm | 35 V | - |
| Tung et al. [16] | 2005 | 2.5 × 2.5 | ±0.6°, 5 μm | 40 V | 5 kHz |
| Liu et al. [14] | 2007 | 4 × 4 | 12.5, 12.5, 3.5 μm | 30 V | - |
| Mukhopadhyay et al. [9] | 2008 | - | 1.72°, 18 μm, 18 μm | 85 V | 465 Hz |
| Kim et al. [19] | 2008 | - | 57 μm | 9 V | - |
| Laszczyk et al. [8] | 2010 | 10 × 10 | 30 μm | 100 V | 290 and 550 Hz |
| Brouwer et al. [13] | 2010 | 4.9 × 5.2 mm | 20, 20, 20 μm | 105 V | 3800 Hz |
| He et al. [58] | 2011 | 3.2 × 3.2 | ±1.5°, 86 μm | 200 V | 1 kHz |
| Chu et al. [37] | 2011 | 8 × 8 | 14°, 11.5° | 12 V | 247 Hz |
| Vertical Comb Actuators | |||||
| Conant et al. [27] | 2000 | 0.55 dia mirror | 24.9° | 250 V | 34 kHz |
| Patterson et al. [29] | 2002 | 1 × 1 mirror | 18° | 110 V | 1400 Hz |
| Xie et al. [38] | 2002 | 0.6 × 0.6 | 270 μm | 14 V | 5.08 kHz |
| Lee et al. [32] | 2002 | 1.5 × 1.2 mirror | 12° | 28 , 35 | 1353 Hz |
| Xie et al. [45] | 2003 | 1 × 1 mirror | 4.7° | 25 V | 233 Hz |
| Milanovic et al. [42] | 2004 | 0.4 × 0.4 | 10°, 10°, 30 μm | 150 V | 1890 Hz |
| Lee [36] | 2004 | 1.5 × 1.5 | ±15.2° mech | 40 V | 1340 Hz |
| Jeong et al. [44] | 2005 | 0.3 dia | 6.5°, 3 μm | 5.5 V | 830 Hz |
| Jung et al. [21] | 2005 | 2.5 × 3 die | 30° both axis | 100 V | 8 kHz |
| Piyawattanametha et al. [34] | 2005 | - | 12.4° and 8.2° | 55 V | 144 Hz |
| Chong et al. [28] | 2006 | - | 8° | 5 V | 350 Hz |
| Jung et al. [22] | 2006 | 1.2 mm mirror | 20° optical | 100 V | 2.4 kHz |
| Wu et al. [31] | 2006 | 0.8 × 0.8 mirror | 1.5° (2-axis) | 35 V | 3.8 kHz |
| Wu et al. [31] | 2006 | - | 16.3, 16.3, 4.1 μm | 30 V | 1900 Hz |
| Zhou et al. [33] | 2006 | 0.8 × 0.8 mirror | 21.8° one axis | 75 V | 3.6 kHz |
| Aguirre et al. [24] | 2007 | 3 × 3 | ±6° mech. (2-axis) | 160 V | 140 and 463 Hz |
| Pardo et al. [43] | 2007 | 0.12 × 0.12 mirror | 8°, 5 μm | 110 V | - |
| Wu et al. [26] | 2007 | 0.2 × 0.15 | 46° | 140 V | - |
| Hsu et al. [30] | 2008 | 1 mm dia | 10° optical | 100 V | 30 kHz |
| Kumar et al. [25] | 2008 | 2 × 2.5 die | ±9° (2 axis) | 110 V | 385 Hz |
| Sandner et al. [40] | 2009 | 3 dia mirror | 100 μm | 44 V | 500 Hz |
| 1.1 × 1.5 | 250 μm | 30 V | 5000 Hz | ||
| Rotary Comb Actuators | |||||
| Ayers et al. [52] | 2004 | <1 mm diameter | - | - | - |
| Grade et al. [46] | 2004 | 4.3 × 3 chip | 5°, 300 μm | 150 V | 300 Hz |
| Yeh et al. [48] | 2006 | 3.2 × 4.7 chip | 2.6° | 5 V | 400 Hz |
| Zhang et al. [47] | 2007 | 1.5 mm long | 4.7° | 70 V | - |
| Surface Electrostatic Actuators | |||||
| Su et al. [70] | 2001 | 0.48 × 0.46 mirror | 7.5° | - | - |
| Zara et al. [73,74,75] | 2002 | IFA method | 77° and 142° | 65 V | - |
| 2002 | (1.5 mirror) | 50° optical, 146° | 50 V | 20.6 Hz | |
| 2003 | 2 × 2.25 mm | - | - | - | |
| Niklaus et al. [68] | 2003 | 16 μm × 16 μm | 0.8 μm gap (one axis) | 12.5 V | - |
| Greywall et al. [63] | 2003 | - | 8° | 142 V | - |
| Greywall et al. [63] | 2003 | - | 9° | 210 V | - |
| Dokmeci et al. [71] | 2004 | 0.75 × 0.8 mirror | 5° | 60 V | 175 Hz |
| Pan [55] | 2004 | - | 50 μm | 100 V | - |
| Yeow et al. [53] | 2005 | 1.4 × 1.7 | - | 100V | 45 and 181 Hz |
| Kudrle et al. [61] | 2005 | 70 × 70 for 1296 mirrors | 5° mech. | 160 V | 78 and 187 Hz |
| Yan et al. [60] | 2005 | 0.2 × 0.2 mirror | 0.5° | 2.7 V | 50 Hz |
| Cheng et al. [66] | 2005 | - | 5 μm | 22.5 V | - |
| Kallweit et al. [64] | 2006 | 0.5 × 0.5 | 2.5° (one axis) | 300 V | - |
| Singh et al. [65] | 2006 | 10 × 10 | 2° | 50 V | - |
| Joudrey et al. [67] | 2006 | 8 × 3 | 2° | 200 V | 1000 Hz |
| Ya’akobovitz et al. [62] | 2008 | 2 × 2 plate | 10° (one axis) | 20 V | 3.8 kHz |
| Kao et al. [54] | 2009 | 50 μm mirror | 2.25° both axis | 40 V | 59.1 kHz |
| (Displacement up 2.10 μm) | |||||
| Hu et al. [57,59] | 2010 | 0.4 × 0.4 mirror | 1.8°, 1.65 μm | 100 V | 2.5 kHz |
| Zhang et al. [12] | 2010 | - | 5° | 30 V | - |
| Bai et al. [72] | 2010 | 1 × 1 mirror | 11° | 55 V, 240 V | - |
| Michael et al. [56] | 2012 | 0.2 × 0.8 mirror | 27 μm | 17 V | - |
2.2. Piezoelectric Actuators
2.2.1. Bulk Lead Zirconate Titanate (PZT)
2.2.2. PZT Thin Film
| Reference | Year | Size (in mm) | Characteristics | Operating Conditions | Natural Frequency |
|---|---|---|---|---|---|
| Yee et al. [95] | 2001 | 2 × 2 | ±0.75° (2D) | ±15V | - |
| Tsaur et al. [93] | 2002 | 3 × 3 | 26°/24° (2D) | 15 V | 3750 Hz |
| Smits et al. [94] | 2005 | 1.3 × 1.3 mirror | 40°, 180 μm | 18 V | 17.4 kHz |
| Gao et al. [97] | 2006 | 1 × 1.25 | 0.0123 μm | 7.5 V | 1.5 kHz |
| Kim et al. [85] | 2008 | - | 5.5°(X), 4.7°(Y) | 16 V | 1.7 kHz |
| Gilchrist et al. [92] | 2009 | 0.6 × 0.84 | ±7° | 10 V | 1–2 kHz |
| Koh et al. [88] | 2010 | 3 × 3 mirror | 2° DC/ 5° AC, 35 μm | 3 V | 122 Hz |
| Qiu et al. [96] | 2010 | 1.7 × 1.7 | 90 μm | 20V | 240 Hz |
| Zhu et al. [76] | 2011 | 2 × 2 | 5° (2D), 32 μm | 2 V | 316 Hz |
| Koh et al. [89] | 2011 | 5 × 5 mirror | ±8° bending and ±4.6° torsion | 9 V | 30 Hz |
| Koh et al. [90] | 2011 | 4.2 × 5.2 | ±38° bending and ±2° torsion | 3 V | 27 Hz |
| Pan et al. [98] | 2011 | 1 × 1 mirror with fiber | 17.9°/2.6° | 400 V | 6780 Hz |
| Koh et al. [91] | 2012 | - | 4.6° | 10 V | 27 Hz |
| Liu et al. [77] | 2013 | 2 × 2 | ±2°, 27 μm | 5 V | 2.4 kHz |
| Aktakka et al. [78] | 2013 | 3 × 3 (2.3 mirror) | ±1.15° (3D), ±21 μm | 25 V | 930 Hz |
2.3. Electrothermal Actuators
2.3.1. Cantilever Micromirror
2.3.2. Parallel-Connected Micromirror
| Reference | Year | Size (in mm) | Characteristics | Operating Conditions | Natural Frequency |
|---|---|---|---|---|---|
| Buser et al. [104] | 1992 | - | 8° | 180 mW | - |
| Buhler et al. [105] | 1995 | 0.035 × 0.04 | 4.5° | - | - |
| Schweizer et al. [101] | 1999 | - | 90° | 1 mW | 330 Hz |
| Schweizer et al. [100] | 2000 | - | 30° | 5 mW | 220 Hz |
| Pan et al. [106] | 2001 | - | 15° | - | 165 Hz |
| Xie et al. [38] | 2002 | 1 × 1 mirror | 32° optical | 12 mA | - |
| Xie et al. [128] | 2003 | 1 × 1 mirror | 35° optical | 7 mA | - |
| Xie et al. [116] | 2003 | 1 × 1 mirror | 32° optical | 12 mA | 165 Hz |
| Xie et al. [118] | 2003 | 1 × 1 mirror | 37° optical | 7 mA | - |
| Jain et al. [119] | 2004 | 1 × 1 mirror | 64° and 33° (2R) | 8 mA | 259 Hz |
| Jain et al. [123] | 2005 | 0.7 × 0.32 (0.19 mirror) | 26.5°, ±15, 200 μm | 6 V | 1.18 kHz |
| Todd et al. [127] | 2006 | 0.5 × 0.5 mirror | 56 μm | - | - |
| Jiang et al. [107] | 2006 | 50 μm cantilever | 300 nm | 0.2 V | 117 kHz |
| Henneken et al. [99] | 2006 | 2 mm length | 13 μm | 45 V | - |
| Jain et al. [125] | 2006 | 0.5 × 0.5 mirror | ±30° (2R), 500 μm | 12 V | 170 Hz |
| Singh et al. [110] | 2008 | 1 × 1 | 17°, 250 μm | 2 V | - |
| Xu et al. [112] | 2008 | 2.5 × 2.5 | 17° mech. | 1.5 V | 46 Hz cut-off |
| Wu et al. [126] | 2008 | 2.5 × 2.5 | 0.7° tilt, 620 μm | 5.3 V | 500 Hz |
| Jia et al. [124] | 2009 | 1 × 1 mirror | ±30° (2R), 480 μm | 8 V | 336 Hz |
| Premachandran et al. [111] | 2009 | 1.5 × 1.5 chip | 16° | - | - |
| Wang et al. [113] | 2010 | 1.5 × 1.5 | 11° | 1.2 V | 60 Hz |
| Sun et al. [121] | 2010 | - | 30° (2R), 600 μm | 5.5 V | 13 Hz |
| Mu et al. [115] | 2011 | 1 mm dia. mirror | 11° | 1.4 V | 75 Hz |
| Pal et al. [109] | 2011 | 1 mm dia. mirror | 60° (2R) | 0.6 V | 104 Hz |
| Liu et al. [120] | 2011 | 1.5 × 1.5 | ±16° (2 layer flip) | 3.6 V | 659 Hz |
| Izhar et al. [122] | 2011 | 4.5 die 1.3 | 32° optical, 131 μm | 12 mW | 10.5 Hz cut-off |
| Liu et al. [103] | 2012 | 2 × 2 | ±11°, 227 μm | 0.6 V | 197 Hz |
2.4. Magnetic Actuators
2.5. Other Actuators

| Actuation | Reference | Year | Size (in mm) | Characteristics | Operating Conditions | Natural Frequency |
|---|---|---|---|---|---|---|
| Electromagnetic | Cho et al. [134] | 2002 | 0.8 dia. mirror | ±4.35°, ±15.7° | 4.2 V/1.7 V | - |
| Electromagnetic | Ahn et al. [133] | 2004 | 3.5 × 3.5 mirror | ±1.51°, ±5.71° | 20 mA | 920 Hz |
| Electromagnetic | Mitsui et al. [135] | 2006 | 7.4 × 9.8 | ±8° static | 4.6 mA | 80.5 Hz |
| Electromagnetic | Kim et al. [129] | 2007 | 2.4 × 2.9 | ±20° optical | 3V | 350 Hz |
| Electromagnetic | Gokdel et al. [130] | 2009 | - | 11.7°, 23.2° | 42 mW | 350 Hz |
| Pneumatic | Werber et al. [148] | 2006 | 2.2 × 2.5 | 40° | 30 kPa | - |
| Thermo-Pn | Werber et al. [150] | 2006 | 2.2 × 2.5 | 13° | 30 V | 10 mHz |
| 11 × 11 | 80 μm | 20 V | - | |||
| Shape Memory | Fu et al. [146] | 2005 | 2.2 × 2.2 | 190 μm (15°) | 5 V, 30 mA | 0.1 Hz |
3. Discussion
3.1. Target Application
3.2. Size
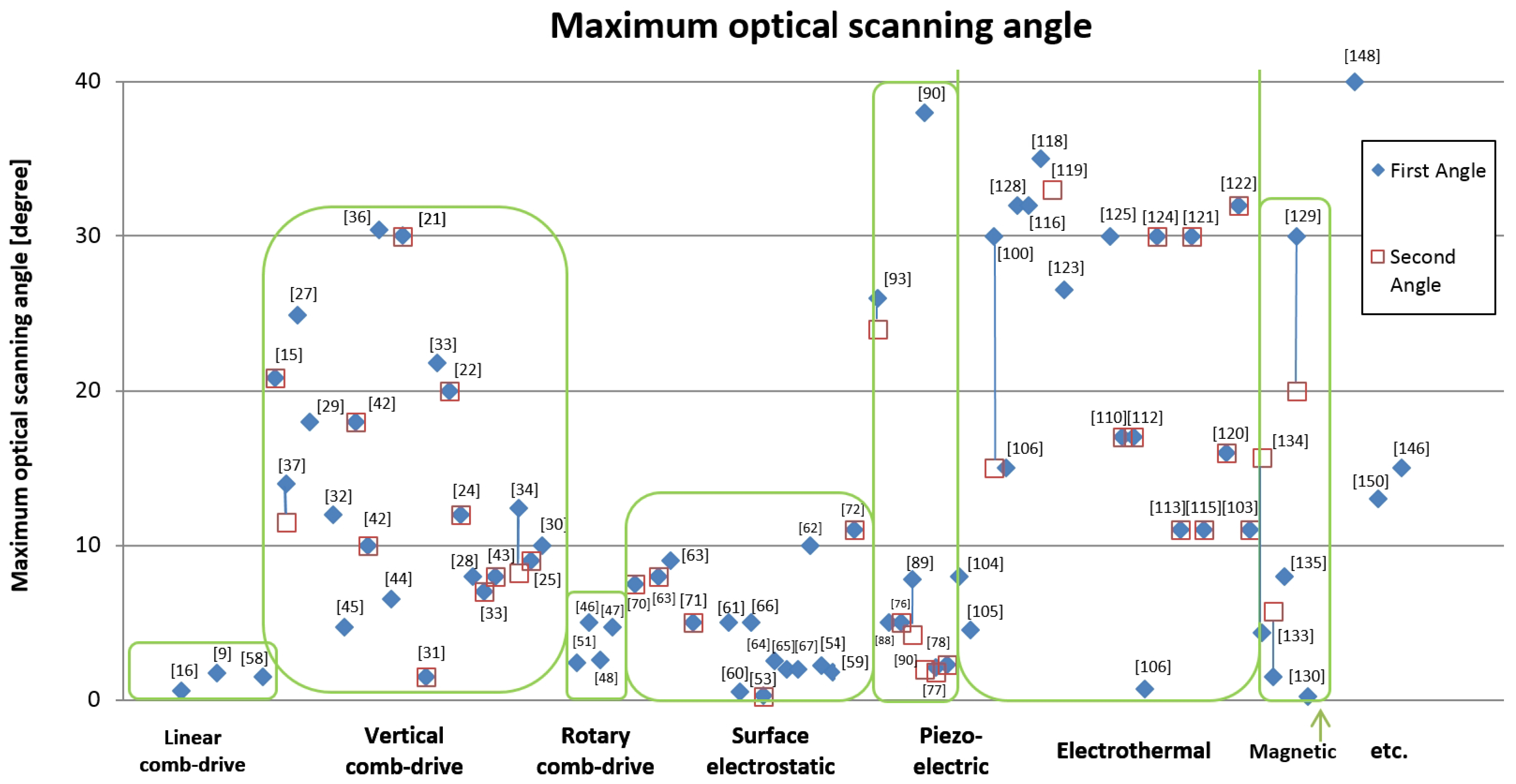
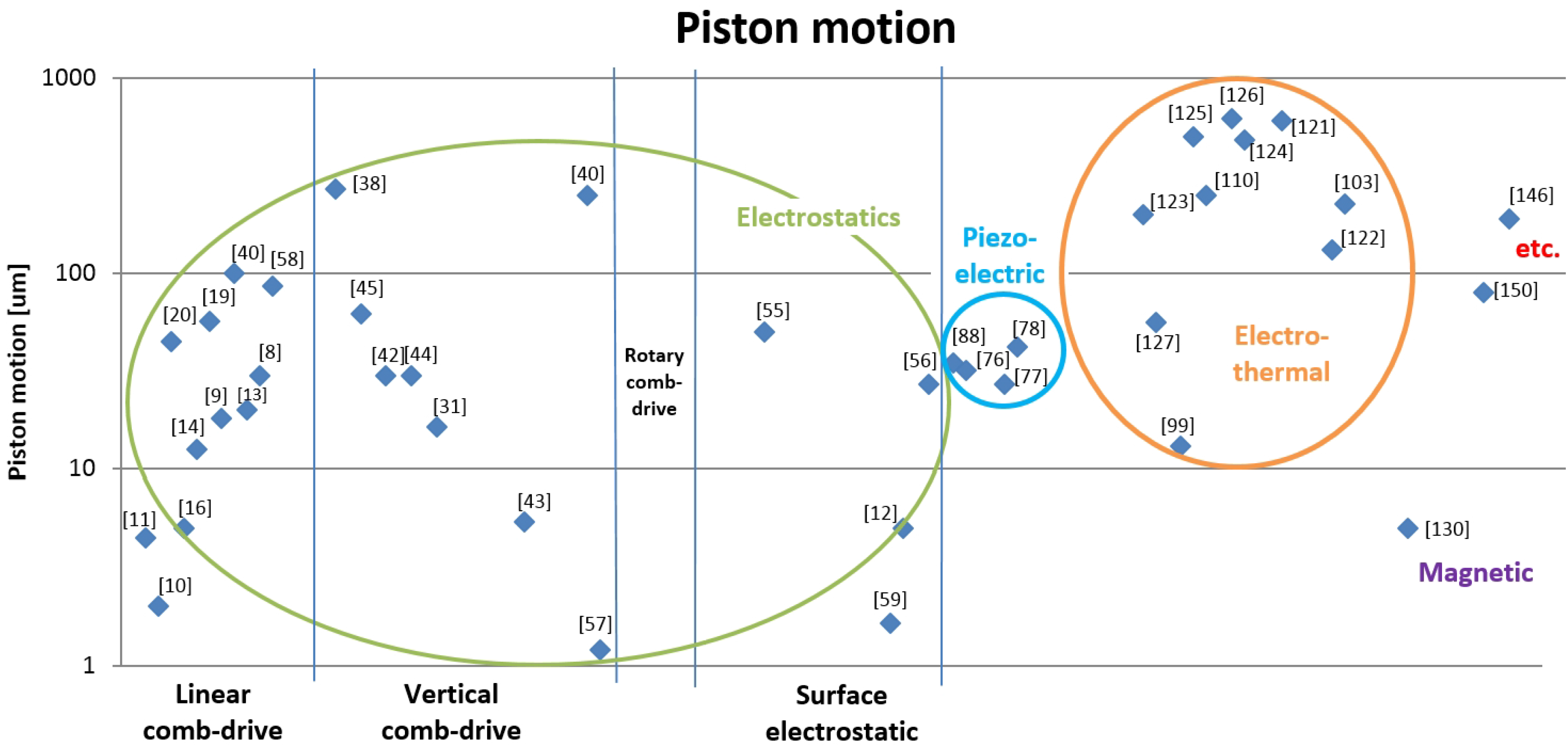
3.3. Range of Motion
3.4. Scanning Speed
3.5. Operating Conditions
3.6. Summary
| Actuation type | Advantages | Disadvantages |
|---|---|---|
| Fast response | Pull-in effect | |
| Electrostatic | Low power consumption | High driving voltage |
| Large scan angle | ||
| Larger driving force | High power consumption | |
| Electromagnetic | Lower driving voltage | External magnets |
| Large scan angle | Electromagnetic interference | |
| Fast responses | Large initial tilting angle | |
| Piezoelectric | Large bandwidth | Charge leakage problems |
| Low power consumption | Hysteresis effect | |
| Large scan angle | High power consumption | |
| Electrothermal | Low driving voltage | Slow response |
| High fill-factor |
4. Future Work
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, A.Q.; Zhang, X.M. A review of MEMS external-cavity tunable lasers. J. Micromech. Microeng. 2007, 17, R1. [Google Scholar] [CrossRef]
- Dudley, D.; Duncan, W.M.; Slaughter, J. Emerging digital micromirror device (DMD) applications. Proc. SPIE 2003, 4985, 14–25. [Google Scholar]
- Liu, A.Q.; Zhang, X.M. MEMS-based endoscopic optical coherence tomography. Int. J. Opt. 2011, 2011, 825629. [Google Scholar]
- Tearney, G.J.; Brezinski, M.E.; Bouma, B.E.; Boppart, S.A.; Pitris, C.; Southern, J.F.; Fujimoto, J.G. In vivo endoscopic optical biopsy with optical coherence tomography. Science 1997, 276, 2037–2039. [Google Scholar] [CrossRef] [PubMed]
- Jackle, S.; Gladkova, N.; Feldchtein, F.; Terentieva, A.; Brand, B.; Gelikonov, G.; Gelikonov, V.; Sergeev, A.; Fritscher-Ravens, A.; Freund, J.; et al. In vivo endoscopic optical coherence tomography of the human gastrointestinal tract-toward optical biopsy. Endoscopy 2000, 32, 743–749. [Google Scholar] [CrossRef] [PubMed]
- Dogangil, G.; Davies, B.L.; Y Baena, F.R. A review of medical robotics for minimally invasive soft tissue surgery. J. Eng. Med. 2010, 224, 653–679. [Google Scholar] [CrossRef]
- Yaqoob, Z.; Wu, J.; McDowell, E.J.; Heng, X.; Yang, C. Methods and application areas of endoscopic optical coherence tomography. J. Biomed. Opt. 2006, 11, 063001. [Google Scholar] [CrossRef] [PubMed]
- Laszczyk, K.; Bargiel, S.; Gorecki, C.; Krezel, J.; Dziuban, P.; Kujawinskab, M.; Callet, D.; Frank, S. A two directional electrostatic comb-drive XY micro-stage for MOEMS applications. Sens. Actuators A Phys. 2010, 163, 255–265. [Google Scholar] [CrossRef]
- Mukhopadhyay, D.; Dong, J.; Pengwang, E.; Ferreira, P. A SOI-MEMS-based 3-DOF planar parallel-kinematics nanopositioning stage. Sens. Actuators A Phys. 2008, 147, 340–351. [Google Scholar] [CrossRef]
- Sun, Y.; Piyabongkarn, D.; Sezen, A.; Nelson, B.J.; Rajamani, R. A high-aspect-ratio two-axis electrostatic microactuator with extended travel range. Sens. Actuators A Phys. 2002, 102, 49–60. [Google Scholar] [CrossRef]
- Sun, Y.; Piyabongkarn, D.; Sezen, A.; Nelson, B.J.; Rajamani, R.; Schoch, R.; Potasek, D.P. A novel dual-axis electrostatic microactuation system for micromanipulation. In Proceedings of 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems, EPFL, Switzerland, 30 September– 4 October 2002; Volume 2, pp. 1796–1801.
- Zhang, Q.; Zhang, J.; Yu, M.; Tan, C.W.; Lo, G.Q.; Kwong, D.L. A two-wafer approach for integration of optical MEMS and photonics on silicon substrate. IEEE Photon. Technol. Lett. 2010, 22, 269–271. [Google Scholar] [CrossRef]
- Brouwer, D.M.; Jong, B.R.D.; Soemers, H.M.J. Design and modeling of a six DOFs MEMS-based precision manipulator. Precision Eng. 2010, 34, 307–319. [Google Scholar] [CrossRef]
- Liu, X.; Kim, K.; Sun, Y. A MEMS stage for 3-axis nanopositioning. J. Micromech. Microeng. 2007, 17, 1796. [Google Scholar] [CrossRef]
- Milanovic, V.; Last, M.; Pister, K.S.J. Monolithic silicon micromirrors with large scanning angle. In Proceedings of IEEE/LEOS International Conference on Optical MEMS (Optical MEMS 2001), Okinawa, Japan, 25–28 September 2001.
- Tung, Y.C.; Kurabayashi, K. A single-layer PDMS-on-silicon hybrid microactuator with multi-axis out-of-plane motion capabilities-Part I: design and analysis. J. Microelectromech. Syst. 2005, 14, 548–557. [Google Scholar] [CrossRef]
- Tung, Y.C.; Kurabayashi, K. A single-layer PDMS-on-silicon hybrid microactuator with multi-axis out-of-plane motion capabilities-part II: fabrication and characterization. J. Microelectromech. Syst. 2005, 14, 558–566. [Google Scholar] [CrossRef]
- Sun, Y.; Fry, S.N.; Potasek, D.; Bell, D.J.; Nelson, B.J. Characterizing fruit fly flight behavior using a microforce sensor with a new comb-drive configuration. J. Microelectromech. Syst. 2005, 14, 4–11. [Google Scholar] [CrossRef]
- Kim, K.; Liu, X.; Zhang, Y.; Sun, Y. Nanonewton force-controlled manipulation of biological cells using a monolithic MEMS microgripper with two-axis force feedback. J. Micromech. Microeng. 2008, 18, 055013. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Q.X.; Liu, A.Q. Advanced fiber optical switches using deep RIE (DRIE) fabrication. Sens. Actuators A Phys. 2003, 102, 286–295. [Google Scholar] [CrossRef]
- Jung, W.; Zhang, J.; Wang, L.; Wilder-Smith, P.; Chen, Z.; McCormick, D.T.; Tien, N.C. Three-dimensional optical coherence tomography employing a 2-axis microelectromechanical scanning mirror. IEEE J. Sel. Top. Quant. Electron. 2005, 11, 806–810. [Google Scholar] [CrossRef]
- Jung, W.; McCormick, D.T.; Zhang, J.; Wang, L.; Tien, N.C.; Chen, Z. Three-dimensional endoscopic optical coherence tomography by use of a two-axis microelectromechanical scanning mirror. Appl. Phys. Lett. 2006, 88, 163901. [Google Scholar] [CrossRef]
- McCormick, D.T.; Jung, W.; Ahn, Y.C.; Chen, Z.; Tien, N.C. A three dimensional real-time MEMS based optical biopsy system for in-vivo clinical imaging. In Proceedings of 2007 International Solid-State Sensors, Actuators and Microsystems Conference (TRANSDUCERS 2007), Lyon, France, 10–14 June 2007; pp. 203–208.
- Aguirre, A.D.; Hertz, P.R.; Chen, Y.; Fujimoto, J.G.; Piyawattanametha, W.; Fan, L.; Wu, M.C. Two-axis MEMS scanning catheter for ultrahigh resolution three-dimensional and en face imaging. Opt. Express 2007, 15, 2445–2453. [Google Scholar] [CrossRef] [PubMed]
- Kumar, K.; Condit, J.C.; McElroy, A.; Kemp, N.J.; Hoshino, K.; Milner, T.E.; Zhang, X. Fast 3D in vivo swept-source optical coherence tomography using a two-axis MEMS scanning micromirror. J. Opt. A Pure Appl. Opt. 2008, 10, 044013. [Google Scholar] [CrossRef]
- Wu, W.G.; Chen, Q.H.; Yan, G.Z.; Yin, D.Q.; Chen, Z.Y.; Hao, Y.L.; Xu, A.S.; Wang, Y.Y. Micro torsion mirror actuated by compound electrostatic driving structure. Sens. Actuators A Phys. 2007, 135, 758–764. [Google Scholar] [CrossRef]
- Conant, R.A.; Nee, J.T.; Lau, K.Y.; Muller, R.S. A flat high-frequency scanning micromirror. In Proceedings of 2000 Solid-State Sensor and Actuator Workshop, Hilton Head Island, SC, USA, 2–7 June 2002; pp. 6–9.
- Chong, C.; Isamoto, K.; Toshiyoshi, H. Optically modulated MEMS scanning endoscope. IEEE Photon. Technol. Lett. 2006, 18, 133–135. [Google Scholar] [CrossRef]
- Patterson, P.R.; Hah, D.; Nguyen, H.; Toshiyoshi, H.; Chao, R.m.; Wu, M.C. A scanning micromirror with angular comb drive actuation. In Proceedings of The 15th IEEE International Conference on Micro Electro Mechanical Systems (MEMS 2002), Las Vegas, NV, USA, 20–24 January 2002; pp. 544–547.
- Hsu, S.; Klose, T.; Drabe, C.; Schenk, H. Fabrication and characterization of a dynamically flat high resolution micro-scanner. J. Opt. A Pure Appl. Opt. 2008, 10, 044005. [Google Scholar] [CrossRef]
- Wu, M.; Fang, W. A molded surface-micromachining and bulk etching release (MOSBE) fabrication platform on (1 1 1) Si for MOEMS. J. Micromech. Microeng. 2006, 16, 260. [Google Scholar] [CrossRef]
- Lee, J.H.; Ko, Y.C.; Jeong, H.M.; Choi, B.S.; Kim, J.M.; Jeon, D.Y. SOI-based fabrication processes of the scanning mirror having vertical comb fingers. Sens. Actuators A Phys. 2002, 102, 11–18. [Google Scholar] [CrossRef]
- Zhou, L.; Kahn, J.M.; Pister, K.S.J. Scanning micromirrors fabricated by an SOI/SOI wafer-bonding process. J. Microelectromech. Syst. 2006, 15, 24–32. [Google Scholar] [CrossRef]
- Piyawattanametha, W.; Patterson, P.R.; Hah, D.; Toshiyoshi, H.; Wu, M.C. Surface-and bulk-micromachined two-dimensional scanner driven by angular vertical comb actuators. J. Microelectromech. Syst. 2005, 14, 1329–1338. [Google Scholar] [CrossRef]
- Ra, H.; Piyawattanametha, W.; Taguchi, Y.; Lee, S.; Mandella, M.J.; Solgaard, O. Two-dimensional MEMS scanner for dual-axes confocal microscopy. J. Microelectromech. Syst. 2007, 16, 969–976. [Google Scholar] [CrossRef]
- Lee, C. Design and fabrication of epitaxial silicon micromirror devices. Sens. Actuators A Phys. 2004, 115, 581–590. [Google Scholar] [CrossRef]
- Chu, H.M.; Hane, K. Design, fabrication and vacuum operation characteristics of two-dimensional comb-drive micro-scanner. Sens. Actuators A Phys. 2011, 165, 422–430. [Google Scholar] [CrossRef]
- Xie, H.; Fedder, G.K. Vertical comb-finger capacitive actuation and sensing for CMOS-MEMS. Sens. Actuators A Phys. 2002, 95, 212–221. [Google Scholar] [CrossRef]
- Tsuchiya, T.; Funabashi, H. A z-axis differential capacitive SOI accelerometer with vertical comb electrodes. Sens. Actuators A Phys. 2004, 116, 378–383. [Google Scholar] [CrossRef]
- Sandner, T.; Drabe, C.; Schenk, H.; Kenda, A. Large stroke MOEMS actuators for optical path length modulation in miniaturized FTIR spectrometers. Proc. SPIE 2009, 7319, 73190H. [Google Scholar]
- Wu, M.; Fang, W. A molded surface-micromachining and bulk etching release (MOSBE) fabrication platform on (1 1 1) Si for MOEMS. J. Micromech. Microeng. 2006, 16, 260. [Google Scholar] [CrossRef]
- Milanovic, V.; Matus, G.A.; McCormick, D.T. Gimbal-less monolithic silicon actuators for tip-tilt-piston micromirror applications. IEEE J. Sel. Top. Quant. Electron. 2004, 10, 462–471. [Google Scholar] [CrossRef]
- Pardo, F.; Cirelli, R.A.; Ferry, E.J.; Lai, W.Y.C.; Klemens, F.P.; Miner, J.F.; Pai, C.S.; Bower, J.E.; Mansfield, W.M.; Kornblit, A.; et al. Flexible fabrication of large pixel count piston-tip-tilt mirror arrays for fast spatial light modulators. Microelectron. Eng. 2007, 84, 1157–1161. [Google Scholar] [CrossRef]
- Jeong, K.H.; Lee, L.P. A novel microfabrication of a self-aligned vertical comb drive on a single SOI wafer for optical MEMS applications. J. Micromech. Microeng. 2005, 15, 277–281. [Google Scholar] [CrossRef]
- Xie, H.; Pan, Y.; Fedder, G.K. A CMOS-MEMS mirror with curled-hinge comb drives. J. Microelectromech. Syst. 2003, 12, 450–457. [Google Scholar]
- Grade, J.D.; Yasumura, K.Y.; Jerman, H. Advanced, vibration-resistant, comb-drive actuators for use in a tunable laser source. Sens. Actuators A Phys. 2004, 114, 413–422. [Google Scholar] [CrossRef]
- Zhang, X.M.; Liu, A.Q.; Tamil, J.; Yu, A.; Cai, H.; Tang, D.Y.; Lu, C. Real pivot mechanism of rotary comb-drive actuators for MEMS continuously tunable lasers. In Proceedings of 2007 International Solid-State Sensors, Actuators and Microsystems Conference (TRANSDUCERS 2007), Lyon, France, 10–14 June 2007; pp. 1437–1440.
- Yeh, J.A.; Jiang, S.S.; Lee, C. MOEMS variable optical attenuators using rotary comb drive actuators. IEEE Photon. Technol. Lett. 2006, 18, 1170–1172. [Google Scholar] [CrossRef]
- Yeh, J.A.; Chen, C.N.; Lui, Y.S. Large rotation actuated by in-plane rotary comb-drives with serpentine spring suspension. J. Micromech. Microeng. 2005, 15, 201. [Google Scholar] [CrossRef]
- Yang, B.; Lee, C.; Kotlanka, R.K.; Xie, J.; Lim, S.P. A MEMS rotary comb mechanism for harvesting the kinetic energy of planar vibrations. J. Micromech. Microeng. 2010, 20, 065017. [Google Scholar] [CrossRef]
- Lim, T.S.; Ji, C.H.; Oh, C.H.; Kwon, H.; Yee, Y.; Bu, J.U. Electrostatic MEMS variable optical attenuator with rotating folded micromirror. IEEE J. Sel. Top. Quant. Electron. 2004, 10, 558–562. [Google Scholar] [CrossRef]
- Ayers, J.A.; Tang, W.C.; Chen, Z. 360 rotating micro mirror for transmitting and sensing optical coherence tomography signals. In Proceedings of 2004 IEEE Sensors, Vienna, Austria, 24–27 October 2004; pp. 497–500.
- Yeow, J.T.W.; Yang, V.X.D.; Chahwan, A.; Gordon, M.L.; Qi, B.; Vitkin, I.A.; Wilson, B.C.; Goldenberg, A.A. Micromachined 2-D scanner for 3-D optical coherence tomography. Sens. Actuators A Phys. 2005, 117, 331–340. [Google Scholar] [CrossRef]
- Kao, P.H.; Dai, C.L.; Hsu, C.C.; Wu, C.C. Manufacture of micromirror arrays using a CMOS-MEMS technique. Sensors 2009, 9, 6219–6231. [Google Scholar] [CrossRef] [PubMed]
- Pan, C. Silicon-based coupling platform for optical fiber switching in free space. J. Micromech. Microeng. 2004, 14, 129. [Google Scholar] [CrossRef]
- Michael, A.; Kwok, C.Y. Monolithically integrated out-of-plane micro-mirror. Sens. Actuators A Phys. 2012, 179, 263–276. [Google Scholar] [CrossRef]
- Hu, F.; Tang, Y.; Qian, Y. Design of a MEMS micromirror actuated by electrostatic repulsive force. Optik-Int. J. Light Electron Opt. 2012, 123, 387–390. [Google Scholar] [CrossRef]
- He, S.; Mrad, R.B.; Chong, J. Repulsive-force out-of-plane large stroke translation micro electrostatic actuator. J. Micromech. Microeng. 2011, 21, 075002. [Google Scholar] [CrossRef]
- Hu, F.; Yao, J.; Qiu, C.; Ren, H. A MEMS micromirror driven by electrostatic force. J. Electrostatics 2010, 68, 237–242. [Google Scholar] [CrossRef]
- Yan, D.; Apsel, A.; Lal, A. Fabrication and electromechanical characterization of silicon on insulator based electrostatic micro-scanners. Smart Mater. Struct. 2005, 14, 775. [Google Scholar] [CrossRef]
- Kudrle, T.D.; Wang, C.C.; Bancu, M.G.; Hsiao, J.C.; Pareek, A.; Waelti, M.; Kirkos, G.A.; Shone, T.; Fung, C.D.; Mastrangelo, C.H. Single-crystal silicon micromirror array with polysilicon flexures. Sens. Actuators A Phys. 2005, 119, 559–566. [Google Scholar] [CrossRef]
- Yaakobovitz, A.; Krylov, S.; Shacham-Diamand, Y. Large angle SOI tilting actuator with integrated motion transformer and amplifier. Sens. Actuators A Phys. 2008, 148, 422–436. [Google Scholar] [CrossRef]
- Greywall, D.S.; Pai, C.S.; Oh, S.H.; Chang, C.P.; Marom, D.M.; Busch, P.A.; Cirelli, R.A.; Taylor, J.A.; Klemens, F.P.; Sorsch, T.W.; et al. Monolithic fringe-field-activated crystalline silicon tilting-mirror devices. J. Microelectromech. Syst. 2003, 12, 702–707. [Google Scholar] [CrossRef]
- Kallweit, D.; Zappe, H. Fabrication of bulk-Si micromirrors with an integrated tilt sensing mechanism. J. Micromech. Microeng. 2006, 16, 463. [Google Scholar] [CrossRef]
- Singh, J.; Agarwal, A.; Soundarapandian, M. A novel electrostatic microactuator for large deflections in MEMS applications. Thin Solid Films 2006, 504, 64–68. [Google Scholar] [CrossRef]
- Cheng, Y.C.; Dai, C.L.; Lee, C.Y.; Chen, P.H.; Chang, P.Z. A MEMS micromirror fabricated using CMOS post-process. Sens. Actuators A Phys. 2005, 120, 573–581. [Google Scholar] [CrossRef]
- Joudrey, K.; Adams, G.G.; McGruer, N.E. Design, modeling, fabrication and testing of a high aspect ratio electrostatic torsional MEMS micromirror. J. Micromech. Microeng. 2006, 16, 2147. [Google Scholar] [CrossRef]
- Niklaus, F.; Haasl, S.; Stemme, G. Arrays of monocrystalline silicon micromirrors fabricated using CMOS compatible transfer bonding. J. Microelectromech. Syst. 2003, 12, 465–469. [Google Scholar] [CrossRef]
- Hao, Z.; Wingfield, B.; Whitley, M.; Brooks, J.; Hammer, J.A. A design methodology for a bulk-micromachined two-dimensional electrostatic torsion micromirror. J. Microelectromech. Syst. 2003, 12, 692–701. [Google Scholar]
- Su, G.D.J.; Toshiyoshi, H.; Wu, M.C. Surface-micromachined 2-D optical scanners with high-performance single-crystalline silicon micromirrors. IEEE Photon. Technol. Lett. 2001, 13, 606–608. [Google Scholar] [CrossRef]
- Dokmeci, M.R.; Pareek, A.; Bakshi, S.; Waelti, M.; Fung, C.D.; Heng, K.H.; Mastrangelo, C.H. Two-axis single-crystal silicon micromirror arrays. J. Microelectromech. Syst. 2004, 13, 1006–1017. [Google Scholar] [CrossRef]
- Bai, Y.; Yeow, J.T.W.; Wilson, B.C. Design, fabrication, and characteristics of a MEMS micromirror with sidewall electrodes. J. Microelectromech. Syst. 2010, 19, 619–631. [Google Scholar]
- Zara, J.M.; Smith, S.W. Optical scanner using a MEMS actuator. Sens. Actuators A Phys. 2002, 102, 176–184. [Google Scholar] [CrossRef]
- Zara, J.M.; Yazdanfar, S.; Rao, K.D.; Izatt, J.A.; Smith, S.W. Electrostatic micromachine scanning mirror for optical coherence tomography. Opt. Lett. 2003, 28, 628–630. [Google Scholar] [CrossRef] [PubMed]
- Zara, J.M.; Yazdanfar, S.; Rao, K.D.; Izatt, J.A.; Smith, S.W. Scanning mirror for optical coherence tomography using an electrostatic MEMS actuator. Proc. SPIE 2003, 4956, 139–146. [Google Scholar]
- Zhu, Y.; Liu, W.; Jia, K.; Liao, W.; Xie, H. A piezoelectric unimorph actuator based tip-tilt-piston micromirror with high fill factor and small tilt and lateral shift. Sens. Actuators A Phys. 2011, 167, 495–501. [Google Scholar] [CrossRef]
- Liu, W.; Zhu, Y.; Jia, K.; Liao, W.; Tang, Y.; Wang, B.; Xie, H. A tip–tilt–piston micromirror with a double S-shaped unimorph piezoelectric actuator. Sens. Actuators A Phys. 2013, 193, 121–128. [Google Scholar] [CrossRef]
- Aktakka, E.E.; Peterson, R.L.; Najafi, K. A 6-DOF piezoelectric micro vibratory stage based on multi-axis distributed-electrode excitation of PZT/Si unimorph T-beams. In Proceedings of the 17th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS & EUROSENSORS XXVII), Barcelona, Spain, 16–20 June 2013; pp. 1583–1586.
- Aktakka, E.E.; Peterson, R.L.; Najafi, K. A 3-DOF piezoelectric micro vibratory stage based on bulk-PZT/silicon crab-leg suspendsions. In Proceedings of the 26th IEEE International Conference on Micro Electro Mechanical Systems (MEMS 2013), Taipei, Taiwan, 20–24 January 2013; pp. 576–579.
- Wilson, S.A.; Jourdain, R.P.; Owens, S. Pre-stressed piezoelectric bimorph micro-actuators based on machined 40 μm PZT thick films: batch scale fabrication and integration with MEMS. Smart Mater. Struct. 2010, 19, 094001. [Google Scholar] [CrossRef]
- Xu, X.H.; Li, B.Q.; Feng, Y.; Chu, J.R. Design, fabrication and characterization of a bulk-PZT-actuated MEMS deformable mirror. J. Micromech. Microeng. 2007, 17, 2439. [Google Scholar] [CrossRef]
- Li, Y.-G.; Sun, J.; Yang, C.-S.; Liu, J.-Q.; Susumu, S.; Katsuhiko, T. Fabrication and characterization of a lead zirconate titanate micro energy harvester based on eutectic bonding. Chin. Phys. Lett. 2011, 28, 068103. [Google Scholar] [CrossRef]
- Tani, M.; Akamatsu, M.; Yasuda, Y.; Fujita, H.; Toshiyoshi, H. A 2D-optical scanner actuated by PZT film deposited by arc discharged reactive ion-plating (ADRIP) method. In Proceedings of the IEEE/LEOS International Conference on Optical MEMS 2004, Kagawa, Japan, 22–26 August 2004; pp. 188–189.
- Isarakorn, D.; Sambri, A.; Janphuang, P.; Briand, D.; Gariglio, S.; Triscone, J.M.; Guy, F.; Reiner, J.W.; Ahn, C.H.; de Rooij, N.F. Epitaxial piezoelectric MEMS on silicon. J. Micromech. Microeng. 2010, 20, 055008. [Google Scholar] [CrossRef]
- Kim, K.; Liu, X.; Zhang, Y.; Sun, Y. Nanonewton force-controlled manipulation of biological cells using a monolithic MEMS microgripper with two-axis force feedback. J. Micromech. Microeng. 2008, 18, 055013. [Google Scholar] [CrossRef]
- Ataka, M.; Omodaka, A.; Takeshima, N.; Fujita, H. Fabrication and operation of polyimide bimorph actuators for a ciliary motion system. J. Microelectromech. Syst. 1993, 2, 146–150. [Google Scholar] [CrossRef]
- Kawabata, T.; Ikeda, M.; Goto, H.; Matsumoto, M.; Yada, T. The 2-dimensional micro scanner integrated with PZT thin film actuator. In Proceedings of 1997 International Conference Solid State Sensors and Actuators (TRANSDUCER 1997), Chicago, IL, USA, 16–19 June 1997; pp. 339–342.
- Koh, K.H.; Kobayashi, T.; Hsiao, F.L.; Lee, C. Characterization of piezoelectric PZT beam actuators for driving 2D scanning micromirrors. Sens. Actuators A Phys. 2010, 162, 336–347. [Google Scholar] [CrossRef]
- Koh, K.H.; Kobayashi, T.; Xie, J.; Yu, A.; Lee, C. Novel piezoelectric actuation mechanism for a gimbal-less mirror in 2D raster scanning applications. J. Micromech. Microeng. 2011, 21, 075001. [Google Scholar] [CrossRef]
- Koh, K.H.; Kobayashi, T.; Lee, C. A 2-D MEMS scanning mirror based on dynamic mixed mode excitation of a piezoelectric PZT thin film S-shaped actuator. Opt. Express 2011, 19, 13812–13824. [Google Scholar] [CrossRef] [PubMed]
- Koh, K.H.; Kobayashi, T.; Lee, C. Investigation of piezoelectric driven MEMS mirrors based on single and double S-shaped PZT actuator for 2-D scanning applications. Sens. Actuators A Phys. 2012, 184, 149–159. [Google Scholar] [CrossRef]
- Gilchrist, K.H.; McNabb, R.P.; Izatt, J.A.; Grego, S. Piezoelectric scanning mirrors for endoscopic optical coherence tomography. J. Micromech. Microeng. 2009, 19, 095012. [Google Scholar] [CrossRef]
- Tsaur, J.; Zhang, L.; Maeda, R.; Matsumoto, S. 2D micro scanner actuated by sol-gel derived double layered PZT. In Proceedings of 2002 IEEE International Conference Micro Electro Mechanical Systems (MEMS 2002), Las Vegas, NV, USA, 20–24 January 2002; pp. 548–551.
- Smits, J.G.; Fujimoto, K.; Kleptsyn, V.F. Microelectromechanical flexure PZT actuated optical scanner: Static and resonance behavior. J. Micromech. Microeng. 2005, 15, 1285. [Google Scholar] [CrossRef]
- Yee, Y.; Bu, J.U.; Ha, M.; Choi, J.; Oh, H.; Lee, S.; Nam, H. Fabrication and characterization of a PZT actuated micromirror with two-axis rotational motion for free space optics. In Proceedings of 2001 IEEE International Conference Micro Electro Mechanical Systems (MEMS 2001), Interlaken, Switzerland, 21–25 January 2001; pp. 317–320.
- Qiu, Z.; Pulskamp, J.S.; Lin, X.; Rhee, C.H.; Wang, T.; Polcawich, R.G.; Oldham, K. Large displacement vertical translational actuator based on piezoelectric thin films. J. Micromech. Microeng. 2010, 20, 075016. [Google Scholar] [CrossRef] [PubMed]
- Gao, P.; Yao, K.; Tang, X.; He, X.; Shannigrahi, S.; Lou, Y.; Zhang, J.; Okada, K. A piezoelectric micro-actuator with a three-dimensional structure and its micro-fabrication. Sens. Actuators A Phys. 2006, 130, 491–496. [Google Scholar] [CrossRef]
- Pan, C.L.; Ma, Y.T.; Yin, J.; Kong, F.R.; Feng, Z.H. Miniature orthogonal optical scanning mirror excited by torsional piezoelectric fiber actuator. Sens. Actuators A Phys. 2011, 165, 329–337. [Google Scholar] [CrossRef]
- Henneken, V.A.; Tichem, M.; Sarro, P.M. In-package MEMS-based thermal actuators for micro-assembly. J. Micromech. Microeng. 2006, 16, S107. [Google Scholar] [CrossRef]
- Schweizer, S.; Cousseau, P.; Lammel, G.; Calmes, S.; Renaud, P. Two-dimensional thermally actuated optical microprojector. Sens. Actuators A Phys. 2000, 85, 424–429. [Google Scholar] [CrossRef]
- Schweizer, S.; Calmes, S.; Laudon, M.; Renaud, P. Thermally actuated optical microscanner with large angle and low consumption. Sens. Actuators A Phys. 1999, 76, 470–477. [Google Scholar] [CrossRef]
- Rakotondrabe, M.; Fowler, A.; Moheimani, S.R. Characterization of a 2-DoF MEMS nanopositioner with integrated electrothermal actuation and sensing capability. In Proceedings of 2012 IEEE Sensors Conference, Taipei, Taiwan, 28–31 October 2012; pp. 973–976.
- Liu, L.; Pal, S.; Xie, H. MEMS mirrors based on curved concentric electrothermal actuators with very small lateral shift and tilt. In Proceedings of 2011 International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS 2011), Beijing, China, 5–9 June 2011; pp. 2522–2525.
- Buser, R.A.; de Rooij, N.F.; Tischhauser, H.; Dommann, A.; Staufert, G. Biaxial scanning mirror activated by bimorph structures for medical applications. Sens. Actuators A Phys. 1992, 31, 29–34. [Google Scholar] [CrossRef]
- Buhler, J.; Funk, J.; Paul, O.; Steiner, F.P.; Baltes, H. Thermally actuated CMOS micromirrors. Sens. Actuators A Phys. 1995, 47, 572–575. [Google Scholar] [CrossRef]
- Pan, Y.; Xie, H.; Fedder, G.K. Endoscopic optical coherence tomography based on a microelectromechanical mirror. Opt. Lett. 2001, 26, 1966–1968. [Google Scholar] [CrossRef] [PubMed]
- Jiang, L.; Cheung, R.; Hedley, J.; Hassan, M.; Harris, A.J.; Burdess, J.S.; Mehregany, M.; Zorman, C.A. SiC cantilever resonators with electrothermal actuation. Sens. Actuators A Phys. 2006, 128, 376–386. [Google Scholar] [CrossRef]
- Sinclair, M. A high frequency resonant scanner using thermal actuation. In Proceedings of 2002 IEEE International Conference Micro Electro Mechanical Systems (MEMS 2002), Las Vegas, NV, USA, 20–24 January 2002; pp. 698–701.
- Pal, S.; Xie, H. A curved multimorph based electrothermal micromirror with large scan range and low drive voltage. Sens. Actuators A Phys. 2011, 170, 156–163. [Google Scholar] [CrossRef]
- Singh, J.; Teo, J.H.S.; Xu, Y.; Premachandran, C.S.; Chen, N.; Kotlanka, R.; Olivo, M.; Sheppard, C.J.R. A two axes scanning SOI MEMS micromirror for endoscopic bioimaging. J. Micromech. Microeng. 2008, 18, 1–9. [Google Scholar] [CrossRef]
- Premachandran, C.S.; Khairyanto, A.; Sheng, K.; Singh, J.; Teo, J.; Yingshun, X.; Nanguang, C.; Sheppard, C.; Olivo, M. Design, fabrication, and assembly of an optical biosensor probe package for OCT (Optical Coherence Tomography) application. IEEE Tran. Adv. Packag. 2009, 32, 417–422. [Google Scholar] [CrossRef]
- Xu, Y.; Singh, J.; Premachandran, C.S.; Khairyanto, A.; Chen, K.W.S.; Chen, N.; Sheppard, C.J.R.; Olivo, M. Design and development of a 3D scanning MEMS OCT probe using a novel SiOB package assembly. J. Micromech. Microeng. 2008, 18, 125005. [Google Scholar] [CrossRef]
- Wang, M.F.; Xu, Y.; Prem, C.S.; Chen, K.W.S.; Xie, J.; Mu, X.; Tan, C.W.; Yu, A.; Feng, H. Microfabricated endoscopic probe integrated MEMS micromirror for optical coherence tomography bioimaging. In Proceedings of 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Buenos Aires, Argentina, 1–4 September 2010; pp. 57–60.
- Mu, X.J.; Zhou, G.Y.; Feng, H.H.; Xu, Y.S.; Yu, A.B.; Tan, C.W.; Chen, K.W.S.; Xie, J.; Chau, F.S. A 3mm endoscopic probe with integrated MEMS micromirror for optical coherence tomography bioimaging. Procedia Eng. 2010, 5, 681–684. [Google Scholar] [CrossRef]
- Mu, X.; Sun, W.; Feng, H.; Yu, A.; Chen, K.W.S.; Fu, C.Y.; Olivo, M. MEMS micromirror integrated endoscopic probe for optical coherence tomography bioimaging. Sens. Actuators A Phys. 2011, 168, 202–212. [Google Scholar] [CrossRef]
- Xie, H.; Pan, Y.; Fedder, G.K. Endoscopic optical coherence tomographic imaging with a CMOS-MEMS micromirror. Sens. Actuators A Phys. 2003, 103, 237–241. [Google Scholar] [CrossRef]
- Xie, H.; Pan, Y.; Fedder, G.K. A SCS CMOS micromirror for optical coherence tomographic imaging. In Proceedings of 2002 IEEE International Conference Micro Electro Mechanical Systems (MEMS 2002), Las Vegas, NV, USA, 20–24 January 2002; pp. 495–498.
- Xie, T.; Xie, H.; Fedder, G.K.; Pan, Y. Endoscopic optical coherence tomography with a modified microelectromechanical systems mirror for detection of bladder cancers. Appl. Opt. 2003, 42, 6422–6426. [Google Scholar] [CrossRef] [PubMed]
- Jain, A.; Kopa, A.; Pan, Y.; Fedder, G.K.; Xie, H. A two-axis electrothermal micromirror for endoscopic optical coherence tomography. IEEE J. Sel. Top. Quant. Electron. 2004, 10, 636–642. [Google Scholar] [CrossRef]
- Liu, L.; Wu, L.; Sun, J.; Lin, E.; Xie, H. Miniature endoscopic optical coherence tomography probe employing a two-axis microelectromechanical scanning mirror with through-silicon vias. J. Biomed. Opt. 2011, 16, 026006. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Guo, S.; Wu, L.; Liu, L.; Choe, S.W.; Sorg, B.S.; Xie, H. 3D in vivo optical coherence tomography based on a low-voltage, large-scan-range 2D MEMS mirror. Opt. Express 2010, 18, 12065–12075. [Google Scholar] [CrossRef] [PubMed]
- Izhar, U.; Izhar, A.B.; Tatic-Lucic, S. A multi-axis electrothermal micromirror for a miniaturized OCT system. Sens. Actuators A Phys. 2011, 167, 152–161. [Google Scholar] [CrossRef]
- Jain, A.; Qu, H.; Todd, S.; Xie, H. A thermal bimorph micromirror with large bi-directional and vertical actuation. Sens. Actuators A Phys. 2005, 122, 9–15. [Google Scholar] [CrossRef]
- Jia, K.; Pal, S.; Xie, H. An electrothermal tip-tilt-piston micromirror based on folded dual S-shaped bimorphs. J. Microelectromech. Syst. 2009, 19, 1004–1015. [Google Scholar]
- Jain, A.; Xie, H. A single-crystal silicon micromirror for large bi-directional 2D scanning applications. Sens. Actuators A Phys. 2006, 130, 454–460. [Google Scholar] [CrossRef]
- Wu, L.; Xie, H. A large vertical displacement electrothermal bimorph microactuator with very small lateral shift. Sens. Actuators A Phys. 2008, 145, 371–379. [Google Scholar] [CrossRef]
- Todd, S.T.; Jain, A.; Qu, H.; Xie, H. A multi-degree-of-freedom micromirror utilizing inverted-series-connected bimorph actuators. J. Opt. A Pure Appl. Opt. 2006, 8, S352. [Google Scholar] [CrossRef]
- Xie, T.; Xie, H.; Fedder, G.; Pan, Y. Endoscopic optical coherence tomography with new MEMS mirror. Electron. Lett. 2003, 39, 1535–1536. [Google Scholar] [CrossRef]
- Kim, K.H.; Park, B.H.; Maguluri, G.N.; Lee, T.W.; Rogomentich, F.J.; Bancu, M.G.; Bouma, B.E.; de Boer, J.F.; Bernstein, J.J. Two-axis magnetically-driven MEMS scanning catheter for endoscopic high-speed optical coherence tomography. Opt. Express 2007, 15, 18130–18140. [Google Scholar] [CrossRef] [PubMed]
- Gokdel, Y.D.; Sarioglu, B.; Mutlu, S.; Yalcinkaya, A. Design and fabrication of two-axis micromachined steel scanners. J. Micromech. Microeng. 2009, 19, 075001. [Google Scholar] [CrossRef]
- Bernstein, J.J.; Taylor, W.P.; Brazzle, J.D.; Corcoran, C.J.; Kirkos, G.; Odhner, J.E.; Pareek, A.; Waelti, M.; Zai, M. Electromagnetically actuated mirror arrays for use in 3-D optical switching applications. J. Microelectromech. Syst. 2004, 13, 526–535. [Google Scholar] [CrossRef]
- Fujita, T.; Maenaka, K.; Takayama, Y. Dual-axis MEMS mirror for large deflection-angle using SU-8 soft torsion beam. Sens. Actuators A Phys. 2005, 121, 16–21. [Google Scholar] [CrossRef]
- Ahn, S.H.; Kim, Y.K. Silicon scanning mirror of two DOF with compensation current routing. J. Micromech. Microeng. 2004, 14, 1455. [Google Scholar] [CrossRef]
- Cho, I.J.; Yun, K.S.; Lee, H.k.; Yoon, J.B.; Yoon, E. A low-voltage two-axis electromagnetically actuated micromirror with bulk silicon mirror plates and torsion bars. In Proceedings of 2002 IEEE International Conference Micro Electro Mechanical Systems (MEMS 2002), Las Vegas, NV, USA, 20–24 January 2002; pp. 540–543.
- Mitsui, T.; Takahashi, Y.; Watanabe, Y. A 2-axis optical scanner driven nonresonantly by electromagnetic force for OCT imaging. J. Micromech. Microeng. 2006, 16, 2482. [Google Scholar] [CrossRef]
- Judy, J.W.; Muller, R.S. Magnetically actuated, addressable microstructures. J. Microelectromech. Syst. 1997, 6, 249–256. [Google Scholar] [CrossRef]
- Gibbs, M.R.J.; Hill, E.W.; Wright, P.J. Magnetic materials for MEMS applications. J. Phys. D Appl. Phys. 2004, 37, R237. [Google Scholar] [CrossRef]
- Can-Jun, M.; Fei-Ling, Z.; Wuya-Ming. High-Speed and Large-Scale Electromagnetically Actuated Resonant MEMS Optical Scanner. Chin. Phys. Lett. 2007, 24, 3574–3577. [Google Scholar] [CrossRef]
- Yang, H.A.; Tang, T.L.; Lee, S.T.; Fang, W. A novel coilless scanning mirror using eddy current Lorentz force and magnetostatic force. J. Microelectromech. Syst. 2007, 16, 511–520. [Google Scholar] [CrossRef]
- Ozlu, E.; Zhe, J.; Chandra, S.; Cheng, J.; Wu, X. Feasibility study of a smart motion generator utilizing electromagnetic microactuator arrays. Smart Mater. Struct. 2006, 15, 859–868. [Google Scholar] [CrossRef]
- Oliveira, L.C.M.; Barbaroto, P.R.; Ferreira, L.O.S.; Doi, I. A novel Si micromachined moving-coil induction actuated mm-sized resonant scanner. J. Micromech. Microeng. 2006, 16, 165. [Google Scholar] [CrossRef]
- Cros, F.; Arnold, D.P.; Allen, M.G.; Das, S.; Koser, H.; Lang, J.H. Micro Magnetic Induction Machines for Portable Power Applications; Technical Report, DTIC Document; School of Electrical and Computer Engineering, Georgia Institute of Technology: Atlanta, GA USA, 2003. [Google Scholar]
- Christenson, T.R.; Garino, T.J.; Venturini, E.L. Deep X-ray lithography based fabrication of rare-earth based permanent magnets and their applications to microactuators. Electrochem. Soc. Proc. 1999, 98, 312–323. [Google Scholar]
- Ghalichechian, N.; Modafe, A.; Beyaz, M.I.; Ghodssi, R. Design, fabrication, and characterization of a rotary micromotor supported on microball bearings. J. Microelectromech. Syst. 2008, 17, 632–642. [Google Scholar] [CrossRef]
- Nespoli, A.; Besseghini, S.; Pittaccio, S.; Villa, E.; Viscuso, S. The high potential of shape memory alloys in developing miniature mechanical devices: A review on shape memory alloy mini-actuators. Sens. Actuators A Phys. 2010, 158, 149–160. [Google Scholar] [CrossRef]
- Fu, Y.; D, H.; Huang, W.; Zhang, S.; Hu, M. TiNi-based thin film in MEMS applications: A review. Sens. Actuators A Phys. 2004, 112, 395–408. [Google Scholar]
- Haga, Y.; Matsunaga, T.; Makishi, W.; Totsu, K.; Mineta, T.; Esashi, M. Minimally invasive diagnostics and treatment using micro/nano machining. Minim. Invasive Ther. Allied Technol. 2006, 15, 218–225. [Google Scholar] [CrossRef] [PubMed]
- Werber, A.; Zappe, H. Tunable, membrane-based, pneumatic micro-mirrors. J. Opt. A Pure Appl. Opt. 2006, 8, S313. [Google Scholar] [CrossRef]
- Aljasem, K.; Werber, A.; Seifert, A.; Zappe, H. Fiber optic tunable probe for endoscopic optical coherence tomography. J. Opt. A Pure Appl. Opt. 2008, 10, 044012. [Google Scholar] [CrossRef]
- Werber, A.; Zappe, H. Thermo-pneumatically actuated, membrane-based micro-mirror devices. J. Micromech. Microeng. 2006, 16, 2524. [Google Scholar] [CrossRef]
- Zheng, L.S.; Lu, M.S.C. A large-displacement CMOS micromachined thermal actuator with comb electrodes for capacitive sensing. Sens. Actuators A Phys. 2007, 136, 697–703. [Google Scholar] [CrossRef]
- Cao, A.; Kim, J.; Lin, L. Bi-directional electrothermal electromagnetic actuators. J. Micromech. Microeng. 2007, 17, 975. [Google Scholar] [CrossRef]
- MicroRALP: The Micro-Ralp Project. Available online: http://www.microralp.eu/ (accessed on 24 December 2015).
- Rabenorosoa, K.; Tasca, B.; Zerbib, A.; Rougeot, P.; Andreff, N.; Pengwang, E. SQUIPABOT: A Mesoscale Parallel Robot for a Laser Phonosurgery. Int. J. Optomechatronics 2015, 9, 310–324. [Google Scholar] [CrossRef]
- Wio MEMS Chip. Available online: http://www.wiotek.com/english/index.asp (accessed on 24 December 2015).
- Mirror Technologies, Inc. Available online: http://mirrorcletech.com/devices.html (accessed on 24 December 2015).
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pengwang, E.; Rabenorosoa, K.; Rakotondrabe, M.; Andreff, N. Scanning Micromirror Platform Based on MEMS Technology for Medical Application. Micromachines 2016, 7, 24. https://doi.org/10.3390/mi7020024
Pengwang E, Rabenorosoa K, Rakotondrabe M, Andreff N. Scanning Micromirror Platform Based on MEMS Technology for Medical Application. Micromachines. 2016; 7(2):24. https://doi.org/10.3390/mi7020024
Chicago/Turabian StylePengwang, Eakkachai, Kanty Rabenorosoa, Micky Rakotondrabe, and Nicolas Andreff. 2016. "Scanning Micromirror Platform Based on MEMS Technology for Medical Application" Micromachines 7, no. 2: 24. https://doi.org/10.3390/mi7020024
APA StylePengwang, E., Rabenorosoa, K., Rakotondrabe, M., & Andreff, N. (2016). Scanning Micromirror Platform Based on MEMS Technology for Medical Application. Micromachines, 7(2), 24. https://doi.org/10.3390/mi7020024