

Stability Analysis in Milling Based on the Localized Differential Quadrature Method



Abstract
:1. Introduction
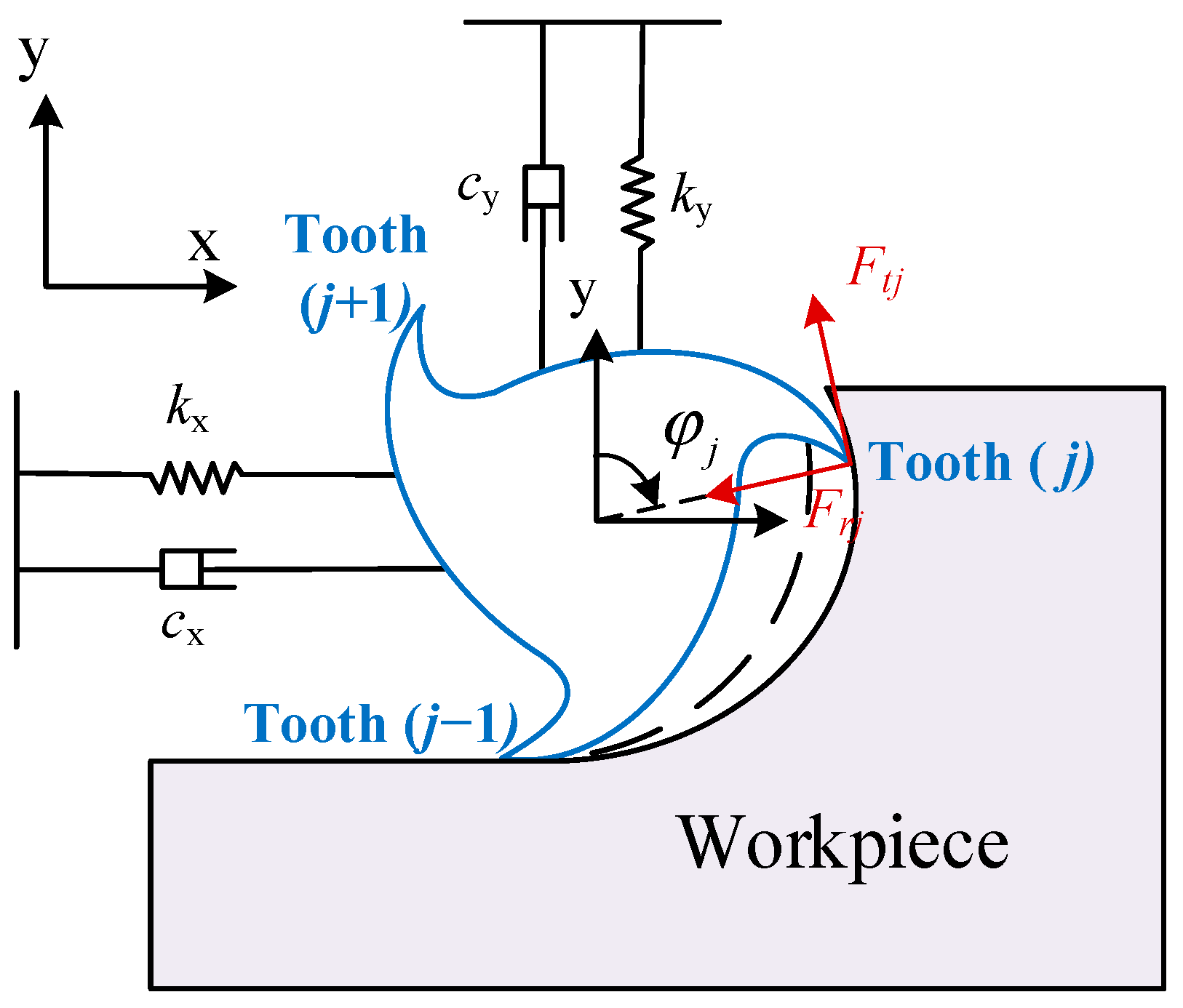
2. Dynamics Model of the Milling Process
3. Algorithm Derivation
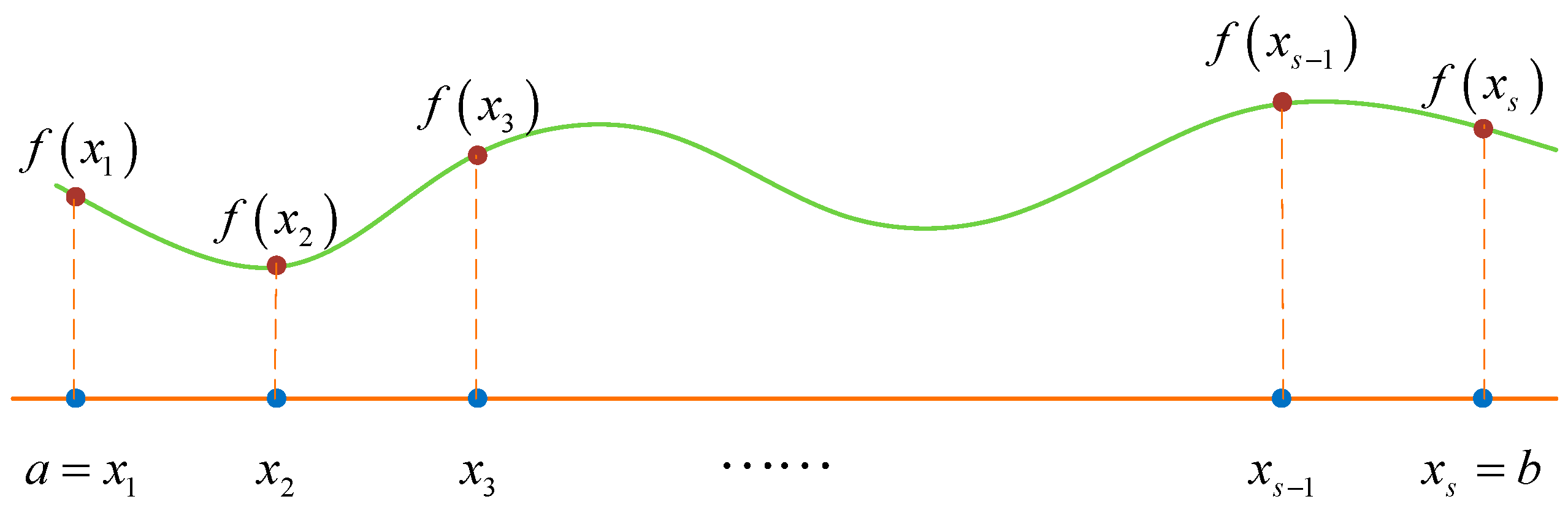
3.1. Classical Differential Quadrature Method
3.2. Stability Analysis of the Milling Process Based on DQM
3.3. A Novel Chatter Stability Analysis Method Based on the LDQM
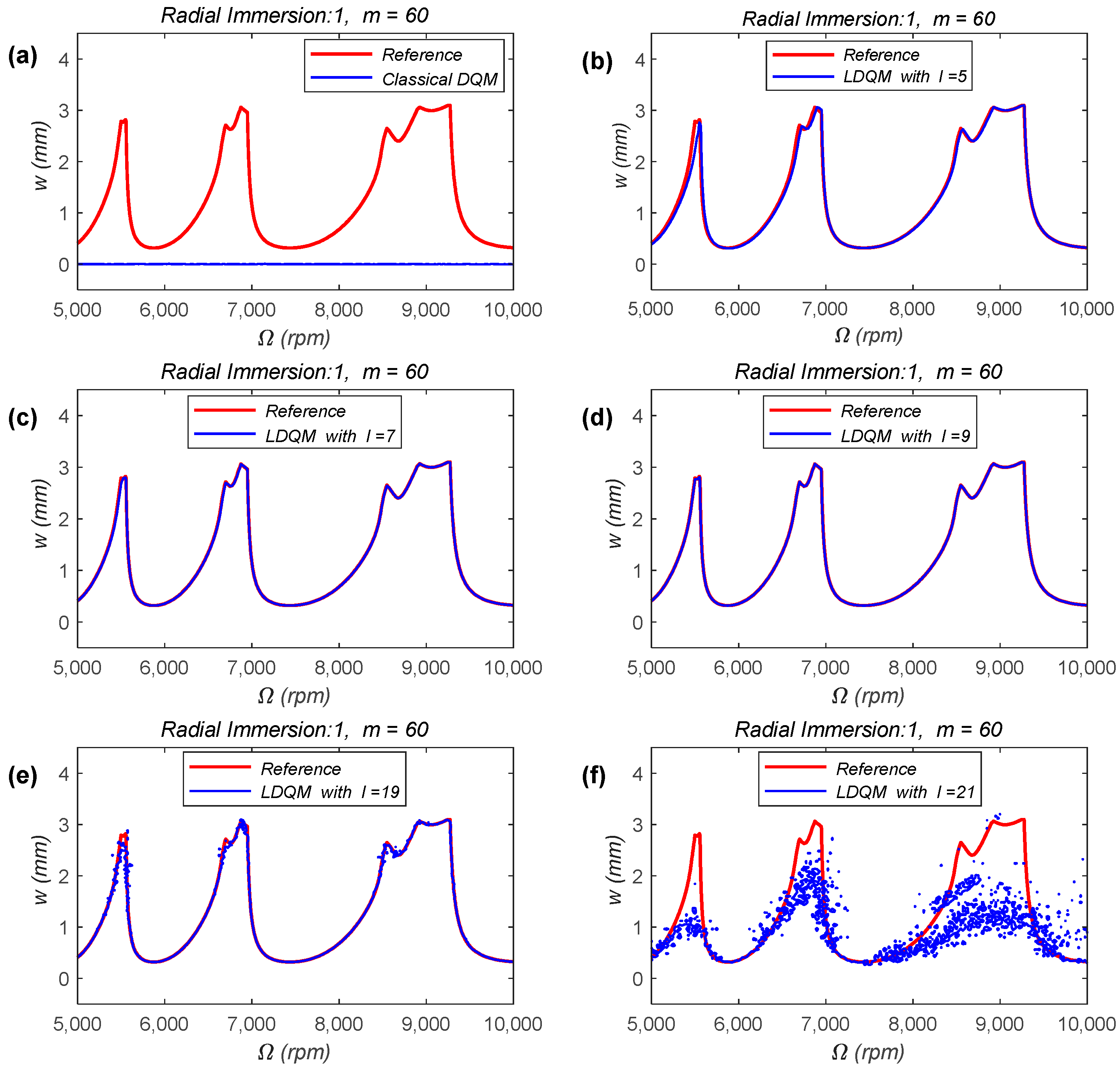
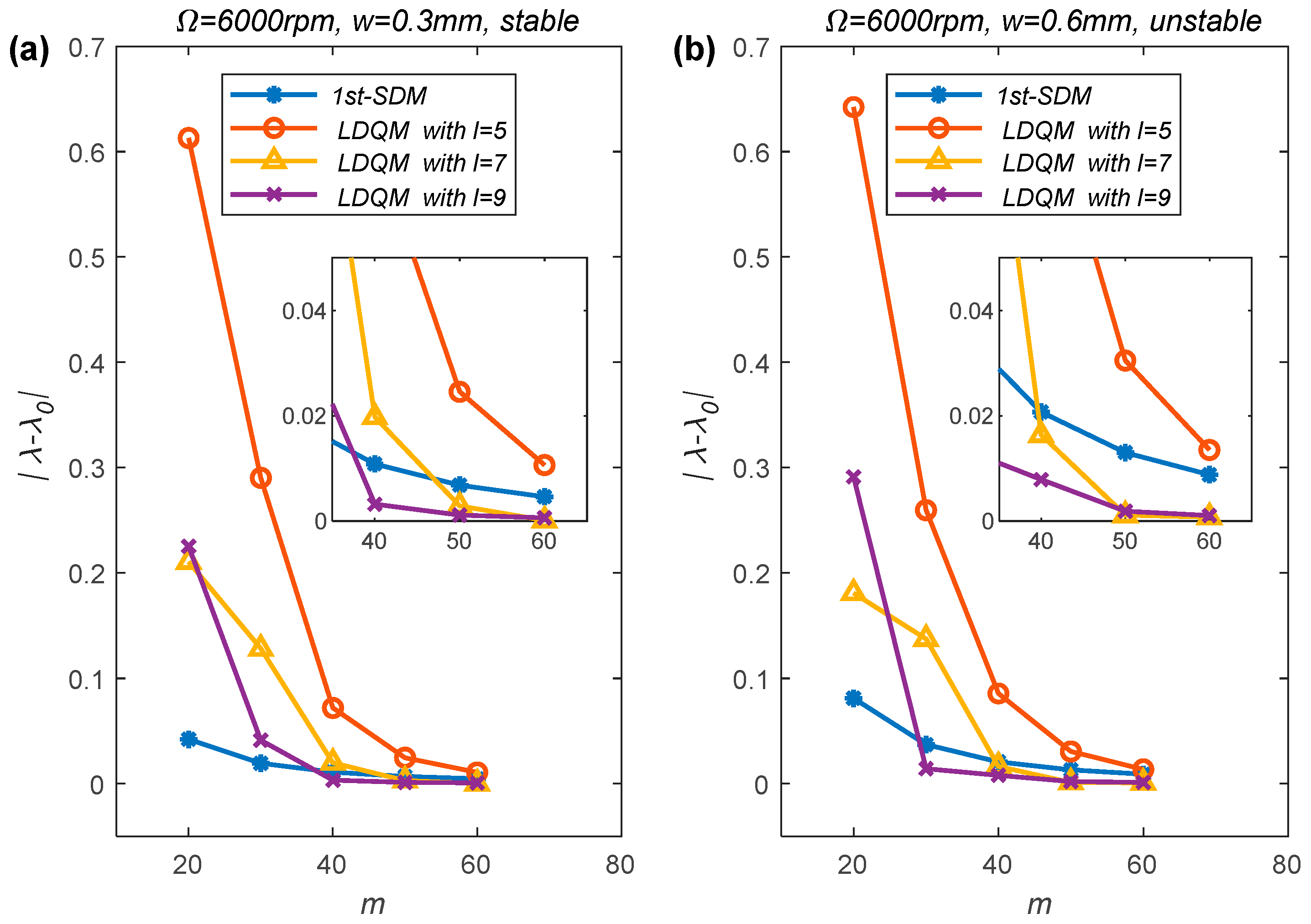
4. Numerical Validation and Discussion
5. Conclusions
- Using the LDQM to process the milling dynamics equation can generate a sparse weighted coefficient matrix, which effectively improves the stability of numerical calculations.
- The local parameter in the proposed method can be flexibly adjusted as needed to achieve both the computational accuracy and efficiency.
- The method presented in this work is not limited by the DOF of the milling system or the milling conditions and is suitable for both large and small radial depths of cutting.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Arnold, R. Cutting tools research: Report of subcommittee on carbide tools: The mechanism of tool vibration in the cutting of steel. Proc. Inst. Mech. Eng. 1946, 154, 261–284. [Google Scholar] [CrossRef]
- Andrew, C.; Tobias, S. A critical comparison of two current theories of machine tool chatter. Int. J. Mach. Tool Des. Res. 1961, 1, 325–335. [Google Scholar] [CrossRef]
- Hanna, N.; Tobias, S. A theory of nonlinear regenerative chatter. ASME J. Eng. Ind. 1974, 96, 247–255. [Google Scholar] [CrossRef]
- Minis, I.; Yanushevsky, R.; Tembo, A.; Hocken, R. Analysis of linear and nonlinear chatter in milling. CIRP Ann. 1990, 39, 459–462. [Google Scholar] [CrossRef]
- Rusinek, R.; Wiercigroch, M.; Wahi, P. Modelling of frictional chatter in metal cutting. Int. J. Mech. Sci. 2014, 89, 167–176. [Google Scholar] [CrossRef]
- Tansel, I.; Li, M.; Demetgul, M.; Bickraj, K.; Kaya, B.; Ozcelik, B. Detecting chatter and estimating wear from the torque of end milling signals by using Index Based Reasoner (IBR). Int. J. Adv. Manuf. Technol. 2012, 58, 109–118. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, H.; Meng, G.; Tu, X.; Cheng, C. Chatter detection in milling process based on the energy entropy of VMD and WPD. Int. J. Mach. Tools Manuf. 2016, 108, 106–112. [Google Scholar] [CrossRef]
- Cao, H.; Yue, Y.; Chen, X.; Zhang, X. Chatter detection in milling process based on synchrosqueezing transform of sound signals. Int. J. Adv. Manuf. Technol. 2017, 89, 2747–2755. [Google Scholar] [CrossRef]
- Mei, Y.; Mo, R.; Sun, H.; Bu, K. Chatter detection in milling based on singular spectrum analysis. Int. J. Adv. Manuf. Technol. 2018, 95, 3475–3486. [Google Scholar] [CrossRef]
- Kakinuma, Y.; Enomoto, K.; Hirano, T.; Ohnishi, K. Active chatter suppression in turning by band-limited force control. CIRP Ann. 2014, 63, 365–368. [Google Scholar] [CrossRef]
- Meng, H.-F.; Kang, Y.; Chen, Z.; Zhao, Y.-B.; Liu, G.-P. Stability analysis and stabilization of a class of cutting systems with chatter suppression. IEEE/ASME Trans. Mechatron. 2014, 20, 991–996. [Google Scholar] [CrossRef]
- Munoa, J.; Beudaert, X.; Dombovari, Z.; Altintas, Y.; Budak, E.; Brecher, C.; Stepan, G. Chatter suppression techniques in metal cutting. CIRP Ann. 2016, 65, 785–808. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, X.; Yan, R.; Chen, X.; Cao, H. Multi harmonic spindle speed variation for milling chatter suppression and parameters optimization. Precis. Eng. 2019, 55, 268–274. [Google Scholar] [CrossRef]
- Altintaş, Y.; Budak, E. Analytical prediction of stability lobes in milling. CIRP Ann.-Manuf. Technol. 1995, 44, 357–362. [Google Scholar] [CrossRef]
- Budak, E.; Altintas, Y. Analytical prediction of chatter stability in milling—Part I: General formulation. J. Dyn. Syst. Meas. Control. 1998, 120, 22–30. [Google Scholar] [CrossRef]
- Budak, E.; Altintas, Y. Analytical prediction of chatter stability in milling—Part II: Application of the general formulation to common milling systems. J. Dyn. Syst. Meas. Control. 1998, 120, 31–36. [Google Scholar] [CrossRef]
- Bayly, P.; Halley, J.; Mann, B.P.; Davies, M. Stability of interrupted cutting by temporal finite element analysis. J. Manuf. Sci. Eng. 2003, 125, 220–225. [Google Scholar] [CrossRef]
- Butcher, E.A.; Ma, H.; Bueler, E.; Averina, V.; Szabo, Z. Stability of linear time-periodic delay-differential equations via Chebyshev polynomials. Int. J. Numer. Methods Eng. 2004, 59, 895–922. [Google Scholar] [CrossRef]
- Butcher, E.A.; Bobrenkov, O.A.; Bueler, E.; Nindujarla, P. Analysis of milling stability by the Chebyshev collocation method: Algorithm and optimal stable immersion levels. J. Comput. Nonlinear Dyn. 2009, 4, 031003. [Google Scholar] [CrossRef]
- Insperger, T.; Stépán, G. Semi-discretization method for delayed systems. Int. J. Numer. Methods Eng. 2002, 55, 503–518. [Google Scholar] [CrossRef]
- Insperger, T.; Stépán, G. Updated semi-discretization method for periodic delay-differential equations with discrete delay. Int. J. Numer. Methods Eng. 2004, 61, 117–141. [Google Scholar] [CrossRef]
- Insperger, T.; Stépán, G.; Turi, J. On the higher-order semi-discretizations for periodic delayed systems. J. Sound Vib. 2008, 313, 334–341. [Google Scholar] [CrossRef]
- Ding, H.; Ding, Y.; Zhu, L. On time-domain methods for milling stability analysis. Chin. Sci. Bull. 2012, 57, 4336–4345. [Google Scholar] [CrossRef]
- Ding, Y.; Zhu, L.; Zhang, X.; Ding, H. A full-discretization method for prediction of milling stability. Int. J. Mach. Tools Manuf. 2010, 50, 502–509. [Google Scholar] [CrossRef]
- Ding, Y.; Zhu, L.; Zhang, X.; Ding, H. Numerical integration method for prediction of milling stability. J. Manuf. Sci. Eng. 2011, 133, 031005. [Google Scholar] [CrossRef]
- Niu, J.; Ding, Y.; Zhu, L.; Ding, H. Runge–Kutta methods for a semi-analytical prediction of milling stability. Nonlinear Dyn. 2014, 76, 289–304. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, H.; Meng, G.; Liu, C. A novel approach for the prediction of the milling stability based on the Simpson method. Int. J. Mach. Tools Manuf. 2015, 99, 43–47. [Google Scholar] [CrossRef]
- Mei, Y.; Mo, R.; Sun, H.; He, B.; Wan, N. Stability prediction in milling based on linear multistep method. Int. J. Adv. Manuf. Technol. 2019, 105, 2677–2688. [Google Scholar] [CrossRef]
- Mei, Y.; Mo, R.; Sun, H.; He, B.; Bu, K. Stability analysis of milling process with multiple delays. Appl. Sci. 2020, 10, 3646. [Google Scholar] [CrossRef]
- Ma, J.; Li, Y.; Zhang, D.; Zhao, B.; Wang, G.; Pang, X. A Novel Updated Full-Discretization Method for Prediction of Milling Stability. Micromachines 2022, 13, 160. [Google Scholar] [CrossRef]
- Zheng, J.; Ren, P.; Zhou, C.; Du, X. Milling Stability Prediction: A New Approach Based on a Composited Newton–Cotes Formula. Micromachines 2023, 14, 1304. [Google Scholar] [CrossRef]
- Bellman, R.; Kashef, B.; Casti, J. Differential quadrature: A technique for the rapid solution of nonlinear partial differential equations. J. Comput. Phys. 1972, 10, 40–52. [Google Scholar] [CrossRef]
- Bellman, R.; Casti, J. Differential quadrature and long-term integration. J. Math. Anal. Appl. 1971, 34, 235–238. [Google Scholar] [CrossRef]
- Bert, C.W.; Jang, S.K.; Striz, A.G. Two new approximate methods for analyzing free vibration of structural components. AIAA J. 1988, 26, 612–618. [Google Scholar] [CrossRef]
- Ding, Y.; Zhu, L.; Zhang, X.; Ding, H. Stability analysis of milling via the differential quadrature method. J. Manuf. Sci. Eng. 2013, 135, 044502. [Google Scholar] [CrossRef]
- Ding, Y.; Niu, J.; Zhu, L.; Ding, H. Differential quadrature method for stability analysis of dynamic systems with multiple delays: Application to simultaneous machining operations. J. Vib. Acoust. 2015, 137, 024501. [Google Scholar] [CrossRef]
- Zong, Z.; Lam, K. A localized differential quadrature (LDQ) method and its application to the 2D wave equation. Comput. Mech. 2002, 29, 382–391. [Google Scholar] [CrossRef]
- Tsai, C.; Young, D.; Hsiang, C. The localized differential quadrature method for two-dimensional stream function formulation of Navier–Stokes equations. Eng. Anal. Bound. Elem. 2011, 35, 1190–1203. [Google Scholar] [CrossRef]
- Shu, C. Differential Quadrature and Its Application in Engineering; Springer: London, UK, 2000. [Google Scholar]
- Schmitz, T.L.; Medicus, K.; Dutterer, B. Exploring once-per-revolution audio signal variance as a chatter indicator. Mach. Sci. Technol. 2002, 6, 215–233. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| mt (kg) | ζ | ωn (rad/s) | Ktc (N/m2) | Krc (N/m2) | N |
|---|---|---|---|---|---|
| 0.03393 | 0.011 | 5793 | 6 × 108 | 2 × 108 | 2 |
| Radial Immersion: 1 | Radial Immersion: 0.5 | Radial Immersion: 0.1 | |
|---|---|---|---|
| 1st-SDM | 255.70 | 251.25 | 248.25 |
| 41.89 | 38.86 | 37.45 | |
| 41.97 | 37.29 | 36.65 | |
| 42.97 | 37.27 | 36.03 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mei, Y.; He, B.; He, S.; Ren, X. Stability Analysis in Milling Based on the Localized Differential Quadrature Method. Micromachines 2024, 15, 54. https://doi.org/10.3390/mi15010054
Mei Y, He B, He S, Ren X. Stability Analysis in Milling Based on the Localized Differential Quadrature Method. Micromachines. 2024; 15(1):54. https://doi.org/10.3390/mi15010054
Chicago/Turabian StyleMei, Yonggang, Bingbing He, Shangwen He, and Xin Ren. 2024. "Stability Analysis in Milling Based on the Localized Differential Quadrature Method" Micromachines 15, no. 1: 54. https://doi.org/10.3390/mi15010054
APA StyleMei, Y., He, B., He, S., & Ren, X. (2024). Stability Analysis in Milling Based on the Localized Differential Quadrature Method. Micromachines, 15(1), 54. https://doi.org/10.3390/mi15010054