Abstract
This paper addresses the robust Kalman filtering problem for multisensor time-varying systems with uncertainties of noise variances. Using the minimax robust estimation principle, based on the worst-case conservative system with the conservative upper bounds of noise variances, the robust local time-varying Kalman filters are presented. Further, the batch covariance intersection (BCI) fusion and a fast sequential covariance intersection (SCI) fusion robust time-varying Kalman filters are presented. They have the robustness that the actual filtering error variances or their traces are guaranteed to have a minimal upper bound for all admissible uncertainties of noise variances. Their robustness is proved based on the proposed Lyapunov equations approach. The concepts of the robust and actual accuracies are presented, and the robust accuracy relations are proved. It is also proved that the robust accuracies of the BCI and SCI fusers are higher than that of each local Kalman filter, the robust accuracy of the BCI fuser is higher than that of the SCI fuser, and the actual accuracies of each robust Kalman filter are higher than its robust accuracy for all admissible uncertainties of noise variances. The corresponding steady-state robust local and fused Kalman filters are also presented for multisensor time-invariant systems, and the convergence in a realization between the local and fused time-varying and steady-state Kalman filters is proved by the dynamic error system analysis (DESA) method and dynamic variance error system analysis (DVESA) method. A simulation example is given to verify the robustness and the correctness of the robust accuracy relations.
1. Introduction
The multisensor information fusion Kalman filtering has wide applications in many high-technology fields, such as advanced manufacturing systems, mechanical industrial robots, unmanned aircraft vehicles, tracking, signal processing, remaining useful life prediction of rolling element bearings [1,2,3], improved tracking and docking of industrial mobile robots [4,5,6,7], and so on. Rolling bearings are the key components of rotating machinery, thus, the prediction of remaining useful life (RUL) is vital in condition-based maintenance (CBM). Reference 1 proposes a new method for RUL predictions of bearings based on time-varying Kalman filter, which can automatically match different degradation stages of bearings and effectively realize the prediction of RUL. Industrial mobile robots are widely used in advanced manufacturing technology systems; ref. [2] used the unscented Kalman filter to improved tracking and docking of industrial mobile robots vision-based kinematics calibration.
The basic assumption for classical Kalman filtering is that the model parameters and noise variances are exactly known, but in many practical applications, such assumption doesn’t always hold. In the presence of these uncertainties, the Kalman filters may not be robust against uncertainties, or may be divergent [8], or the performance of the filters is degraded. In order to solve the filtering problems for uncertain systems, in recent years several results have been derived on the design of various robust Kalman filters. The so-called robust Kalman filtering problem is to find a Kalman filter whose actual filtering error variances, or their traces, are guaranteed to have a minimal or less-conservative upper bound for all admissible uncertainties. There are basically two approaches to solve this problem for the systems with uncertainties of model parameters: one is the Riccati equation approach [8,9,10,11]; the other is the linear matrix inequality (LMI) approach [8,12,13].
The uncertain systems exist widely in control engineering and signal processing. So far, these robust Kalman approaches are only suitable to the systems with the uncertainty of model parameters, while the uncertainties of noise variances are seldom considered. Many results are limited to design the robust Kalman filters for single sensor systems, while the multisensor fusion robust Kalman filters are seldom proposed [14,15,16,17], and the robustness analysis problem was not solved.
The multisensor data fusion problem is to find a fused state estimator based on the local sensor measurement information or the local state estimators such that its accuracy is higher than that of each local state estimator [18,19,20]. There exist two kinds of fusion methods, which are called the centralized and distributed fusion methods depending on whether raw data are used directly for fusion or not [19]. For the centralized fusion method, all the measurement data from local sensors are carried to the fusion center which can give the global optimal fusion estimate, but its disadvantage is to require a large computation burden. The distributed fusion method can give the globally optimal or suboptimal state estimation by combing the local state estimators [20,21,22], whose advantages are that it can reduce the computation burden and can realize fault detection and isolation more conveniently. Under the unbiased linear minimum variance rule (ULMV), there are three distributed optimal fusion rules weighted by matrices, diagonal matrices, and scalars, respectively, which were presented in [20,23].
It is well known that to compute the optimal weights requires knowing the cross-covariance among the local Kalman filtering errors [20,21,22,23]; however, in many practical applications, the variances and cross-covariances of the local filtering errors are unknown or uncertain, or the computation of the cross-covariances is very complex and difficult [21,24]. In order to overcome the above limitation, the covariance intersection (CI) fusion method has been presented in [25,26,27,28,29] and has been widely applied in many fields; for example, the simultaneous localization and mapping (SLAM) [29], remote sensing [30], rocket tracking [31], spacecraft estimation [32], vehicle localization [33] and so on. The CI fuser is obtained by the convex combination of the local estimators, and it has the advantages that the fused estimation problems can be solved for multisensor systems with unknown variances and cross-covariances of local filtering errors, and the computation of the cross-covariances is completely avoided. However, its disadvantage is that the conservative upper bounds of the unknown local filtering error variances are assumed to be known, i.e., the consistent estimation problem of the unknown local filtering error variances was not solved.
Based on the batch processing method, the batch covariance intersection (BCI) fusion Kalman filter with exactly known model parameters and noise variances is presented [22]; this needs to solve the high-dimensional nonlinear optimization problem, so that a larger computation burden and higher complexity are required. In order to reduce the computation burden and complexity by the sequential procession method, a sequential covariance intersection (SCI) fusion Kalman filter is presented in [34] for multisensor systems with noise variances to be known exactly.
In this paper, we will focus on the covariance intersection (CI) fused robust Kalman filtering for multisensor systems with uncertainties of noise variances. A robust CI fusion Kalman filtering theory and methodology are presented. Compared with references [22,25,26,27,28,29,34], the main contributions are as follows:
- In Section 2 and Section 3, a new methodology for designing the robust local and CI fused Kalman filters is presented for multisensor time-varying systems with uncertain noise variances, according to the minimax robust estimation rule [35,36]. Its basic principle is that based on the worst-case conservative system with the conservative upper bound of noise variances, applying the ULMV optimal estimation rule, the conservative local and CI fused Kalman filters with unavailable conservative measurements are obtained, and then replacing the conservative measurements with the actual measurements yields the robust local and CI fused Kalman filters. The classical optimal Kalman filtering methodology [22,34] is developed. The disadvantage of the original CI fusion methodology [25,26,27,28,29] is overcome where the conservative upper bounds of the local filtering error variances are assumed to be known. Hence the robust local Kalman filters are presented, which provide the conservative upper bounds of the local filtering error variances;
- In Section 3, the robust time-varying BCI and SCI fused Kalman filters with uncertain noise variances are presented. The steady-state optimal local, BCI and SCI fused Kalman filters [22,34] with exactly known noise variances are developed;
- In the process of proving Theorems 1 and 3, a Lyapunov equation method for the robustness analysis is presented by which the robustness of the local and CI fused Kalman filters is proved. Its basic principle is that the problem of proving the robustness is converted into that of deciding the positive-definiteness of the solution of a Lyapunov equation;
- In Section 4, the concept of robust accuracy with respect to uncertainties of noise variances is presented, and the robust accuracy relations among the local, BCI and SCI fused Kalman filters with exactly known noised variances [22,34] are extended. The concept of robustness with respect to uncertain noise variances is presented, and the concept of consistency [25,26] is extended;
- In Section 5, for the multisensor time-invariant system with uncertain noise variances, the robust steady-state local, BCI and SCI fusion Kalman filters are also presented by replacing time-varying gains, variances and cross-covariances with their limits, respectively;
- Using lemma 1–3, in Theorem 7, the convergence in a realization of the local and fused time-varying and steady-state robust Kalman filters is proved by the dynamic error system analysis (DESA) method and the dynamic variance error system analysis (DVESA) method. To the best of our knowledge, it is presented for the first time;
- In Section 7, simulation 1 gives the geometric interpretation of the robust accuracy relations based on the variance ellipses and a Monte Carlo simulation example shows the correctness of the proposed robust accuracy relations and gives the sensitivity analysis of the robust SCI fuser.
The remainder of this paper is organized as follows: In Section 2, we derive the local robust time-varying Kalman filter and prove its robustness. Section 3 gives the BCI and SCI fusion robust time-varying Kalman filters and the proof of their robustness. The accuracy analysis of the local and fused Kalman filters is presented in Section 4. Section 5 gives the robust local and fused steady-state Kalman filters and their convergence. The sensitivity problem is given in Section 6. Section 7 gives a Monte Carlo simulation example. The conclusions are given in Section 8. The frequently used notations in the paper are shown in Table 1.

Table 1.
The frequently used notations.
2. Local Robust Time-Varying Kalman Filters
Consider the following multisensor uncertain time-varying system with uncertainties of noise variances
where is the state, is the number of sensors, is the measurement of the subsystem, is the input noise and is the measurement noise of the sensor. , and are known time-varying matrices with appropriate dimensions.
Assumption 1.
andare uncorrelated white noises with zeros mean and unknown uncertain true variancesand, respectively.
Assumption 2. andare known conservative upper bounds ofand, respectively, i.e.,
Assumption 3.
The initial stateis independent ofand, and has mean valueand unknown uncertain true variancewhich satisfies
where is a known conservative upper bound of .
Based on the sensor, for the worst-case conservative multisensor system (1) and (2) with the known conservative upper bounds and of noise variances, the conservative local optimal time-varying Kalman filters are given by [20]
From (1) and (6), the actual filtering errors are
From (15), according to Assumptions 1–3, and noting that and are uncorrelated with , the actual filtering error variance and cross-covariances are given by the Lyapunov equations
with the initial values and .
Theorem 1.
For multisensor uncertain system (1) and (2) with Assumptions 1–3, the actual local Kalman filters (6) is robust in the sense that for all admissible variancesandsatisfying (4) andfor arbitrary time, we have
and are the minimal upper bounds of . Hence, they are called the robust local Kalman filters.
Proof.
Defining , subtracting (16) from (12) yields the Lyapunov equations
Applying (4) yields that . From (5), we have . Hence from (18), we have . Applying the mathematical induction method yields , for all time , i.e., the inequalities (17) hold. If is another upper bound, then for all admissible and , we have . Taking , from (12) and (16), we have . This means that is the minimal upper bounds of . The proof is completed. □
Remark 1.
The robustness (17) is different from the consistency or non-divergent estimation [23]. The robustness means that the inequality (17) holds for all admissible uncertainandsatisfying (4), while the consistency means that for a fixedand, the inequality (17) holds.
3. The CI Fusion Robust Time-Varying Kalman Filter
3.1. The BCI Fusion Robust Time-Varying Kalman Filter
For the two-sensor uncertain systems with the Assumptions 1–3, applying the CI fused algorithm [20,21,22,23], the actual CI fusion time-varying Kalman filter with the conservative upper bounds and of noise variances is presented as following
where are the robust local Kalman filters given in Theorem 1. The weight minimizes the cost function as
When the number of the sensors is larger than two, i.e., . The actual batch covariance intersection (BCI) fusion Kalman filter is presented by the convex combination [26,35] as
where are the robust local Kalman filters, the weights are determined by minimizing the performance index as
which can be obtained by “fimincon” function in Matlab. This needs to solve a -dimensional nonlinear convex optimization problem, so that the larger computation burden and higher complexity are required.
Theorem 2.
The actual BCI fusion filtering error variance is given by
where are computed by (16).
Proof.
From (24), we have
Subtracting (27) from (23), we easily obtain the actual BCI fused filtering error
which yields the formula (26). The proof is completed. □
Theorem 3.
For multisensor uncertain system (1) and (2) with Assumptions 1–3, the actual BCI fusion time-varying Kalman filter (23)–(25) is robust in the sense that for all admissible uncertainties of noise variancesandsatisfying (4), we have
and is the minimal upper bound of . We call (23)as the robust BCI fusion Kalman filter.
Proof.
In order to prove (29), we only need to prove
Pre-multiplying and post-multiplying (30) by , respectively, we have
Substituting (24) and (26) into (31), we only need to prove
From (17) for all admissible and satisfying (4), we have
Pre-multiplying and post-multiplying (33) by , respectively, we have
From (32) and (34), we only need to prove
Applying the constraint yields that
Hence, we only need to prove
Exchanging the subscript symbol with in (37) yields
Adding (37) to (38) yields
which yields , i.e., (29) holds. Taking the trace operation for (29) yields . Applying (25) yields that is minimal for all admissible given in (24). The proof is completed. □
Remark 2.
The proof of Theorem 3 is completely different from the proof in reference [20], where the noise variances are assumed to be exactly known, and the consistency is proved by the mathematical induction. The proof is also different from that in reference [36], where the consistency of the BCI fuser was only proved with the assumption that the local estimates are consistent, while the robustness problem was not proved.
3.2. The SCI Fusion Robust Time-Varying Kalman Filter
In order to reduce the complexity and computational burden, the sequential covariance intersection (SCI) robust time-varying Kalman fuser is presented based on the two-sensor CI fused robust Kalman filters, and it can be realized by a recursive two-sensor CI fusers [34]. Its structure is shown in Figure 1, and the comparison of the computational loads of the BCI filter and the SCI filter are shown in Table 2.
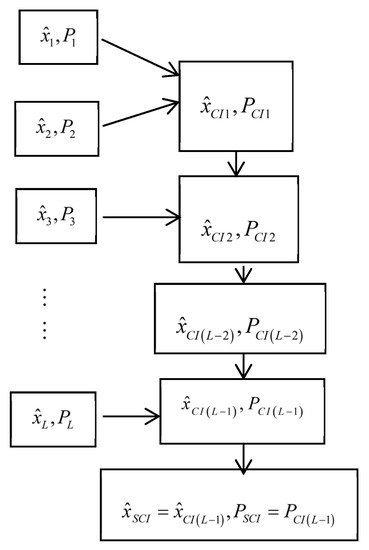
Figure 1.
The structure of the SCI fusion robust Kalman filter.
Table 2.
The comparison of the computational loads.
Based on the two-sensor CI fused algorithm, the actual SCI fusion time-varying Kalman filter with the conservative error variances and is presented as follows
where are the robust local Kalman filters, and the parameters is determined by minimizing the performance index as
The optimization problem (44) is equivalent to the one-dimensional optimization problems (22).
Remark 3.
When the noise variances are exactly known, the optimal steady-state SCI fuser was presented in [34]. However, for multisensor systems with uncertain noise variances, the local and SCI fusion robust time-varying Kalman filters were not presented in [34].
Theorem 4.
For the multisensor uncertain system (1) and (2) with Assumptions 1–3, the actual SCI fused filterand its actual error variancecan be rewritten as batch representation
where the weighting coefficients can be computed recursively by
where the coefficients are obtained by (44).
Proof.
By the mathematical induction (45), (46), (48)–(50) can be proved in [32].
From (46) we have
Subtracting (45) from (51), we get
Substituting (52) into yields the formula (47). The proof is completed. □
Theorem 5.
For multisensor uncertain system (1) and (2) with Assumptions 1–3, the actual SCI fusion time-varying Kalman filter (40)–(44) is robust in the sense that for all admissible uncertainties of noise variancesandsatisfying (4), we have
we call (45) as the robust SCI fusion Kalman filter.
Proof.
Applying Theorem 4, the SCI Kalman filter can be expressed as the equivalent BCI Kalman filter form. According to Theorem 3, the BCI time-varying fuser is robust, so that the SCI time-varying fuser is also robust. The proof is completed. □
Remark 4.
The proof of Theorem 5 is different from that in [34] by the consistency of the two-sensor CI fuser. We can also prove Theorem 5 based on robustness of the two-sensor CI fuser.
4. Accuracy Analysis
From (53), we can see that is the upper bound of the unknown actual fused variances for all possible and all admissible unknown satisfying (16), so that can be viewed as the global accuracy of the SCI fuser. From (46), we see that is independent of actual variances and cross-covariances . So that the global accuracy of the SCI fuser has the robustness with respect to uncertain and . From (16), we see that the uncertainties of and are yielded by the uncertainties of and satisfying (4).
Definition 1.
The robustness with respect to uncertainties of noise variances of a Kalman filter is defined as its actual filtering error variances or their traces yielded by all admissible uncertainties of noise variances, which are guaranteed to have a minimal or less-conservative upper bound and this upper bound is independent of uncertainties of noise variances. The Kalman filter with robustness is called to be robust.
Definition 2.
The robust accuracy of a robust Kalman filter is defined as the trace of a minimal or less-conservative upper bound of its actual filtering error variances, while its actual accuracy is defined as the trace of its actual filtering error variance.
Theorem 6.
For multisensor uncertain system (1) and (2) with Assumptions 1–3, the actual and robust accuracies of the local, BCI and SCI fused time-varying Kalman filters have the relations
Proof.
Taking the trace operations for (17), (29) and (53) yields (54) and (55). In (25), taking and yields , Hence, minimizing with constraints , , we have , , i.e., (56) holds. From (45) and (46), the SCI fuser is equivalent to a BCI fuser with , applying (25) yields (57).
The robust accuracy relation (58) can be proved by mathematical induction. For , from (40)–(44) we have
where are the actual local Kalman filters, the weight minimizes the cost function as
Taking , we have , and taking , we have , hence for yields
Similarly, for , from (40)–(44) we have
From (62) and (63), one can obtain
By the mathematical induction method, assume that for , the following inequality holds
For , from (44), we have
From (65) and (66) yields
Noting that , which yields the inequality (58). The proof is completed. □
Remark 5.
The accuracy relations (54) and (55) mean that for all admissible uncertainties of variances satisfying (4) and (5), the actual accuracies, of the local or fused time-varying Kalman filter are globally controlled by, therefore the robust accuracyis also called the global accuracy of a robust Kalman filter. The robustness of the local and fused filters means that the robust accuracyis independent of arbitrarily variances satisfying (4) and (5).
Remark 6.
From the definition 2, the smaller(or) means the higher robust (or actual) accuracy. From (54)–(58), we conclude that the robust accuracy of the robust SCI fuser is higher than that of each local robust Kalman filter, and the robust accuracy of the BCI fuser is higher than that of the SCI fuser. The actual accuracies of a robust Kalman filter are higher than its robust accuracy for all admissible uncertainties.
Remark 7.
Theorem 1 shows thatis the minimal upper bound ofin the matrix inequality sense. Theorem 3 shows thatis the minimal upper bound ofin the trace inequality sense. From (55), (57) and (58) yields that, so thatis a less-conservative upper bound of.
5. Robust Local and Fused Steady-State Kalman Filters
Now we investigate the asymptotic properties of the local and fused robust time-varying Kalman filters, we shall present the corresponding steady-state robust Kalman filters. We shall also rigorously prove the convergence in a realization between the robust time-varying and steady-state Kalman filters, by the DESA method and DVESA method [37,38].
Lemma 1
[39]. Consider the following Lyapunov equation withbeing a symmetric matrix
whereandare thematrices,is a stable matrix (i.e., all its eigenvalues are inside the unit circle). If, thenis symmetric and unique, and.
Lemma 2
[38]. Consider the time-varying Lyapunov equation
where , the output and the input are the matrices, and the matrices and are uniformly asymptotically stable, i.e., there exist constants and such that
If is bounded, thenis bounded. If, then, as. Notice thatis called to be bounded, if(constant), for arbitrary.
Lemma 3
[37]. Consider a dynamic error system
where,, andis uniformly asymptotically stable. Ifis bounded, thenis bounded. If, then, as.
Theorem 7.
For multisensor uncertain time-invariant system (1) and (2) with Assumptions 1–2, where, , , , andare all the constant matrices. If each subsystem with conservative noise variancesandis completely observable and completely controllable, then the actual local steady-state Kalman filters are given as
where are the actual measurements, and the initial value can arbitrarily be selected. satisfies the steady-state Riccati equations
and the conservative cross-covariances and the actual cross-covariancessatisfy the steady-state Lyapunov equations
with the definition ,, and we have
The actual local steady-state Kalman filters (72) are robust in the sense that for all admissible uncertainties of and satisfying , then
and
is the minimal upper bound of
. They are called the robust local steady-state Kalman filters.
Proof.
According to the complete observability and complete controllability of each subsystem, we have [40]
Then from (7), (8) and (11), we have
where are stable matrices [40], and are uniformly asymptotically stable [40]. When , taking the limit operations for (6)–(11), (12) and (16), we obtain (72)–(77). From , the gains are bounded, which yields the boundedness of the input of the Lyapunov Equation (12). Hence, applying Lemma 2 to (12) yields that are bounded. Setting with , and subtracting (76) from (12) with and , and defining , yields the Lyapunov equations
Applying , the boundedness of , and yields that . Applying Lemma 2 to (83) yields , as , i.e., (78) holds. Similarly, we can prove (79). Taking the limit operation for (17), as , and applying (78) and (79) yields (80). Taking , subtracting (77) from (76), and applying Lemma 1 yields , if is arbitrary other upper bound of for all admissible and satisfying , then we have , which yields that is the minimal. The proof is completed. □
Theorem 8.
For multisensor uncertain time-invariant system (1) and (2) with Assumptions 1–2, if each subsystem with conservative noise variancesandis completely observable and completely controllable, then the actual steady-state BCI fusion Kalman filter is given as
where are given in Theorem 7, and the optimal weighting coefficients are obtained by minimizing the performance index as
It has the robustness in the sense that for all admissible uncertainties of and satisfying , we have
where the actual fused steady-state filtering error covariance is given as
and
is the minimal upper bound of
. It is called the robust steady-state BCI fusion Kalman filter.
Proof.
As , taking the limit operations for (23)–(26) yields (85)–(87). Taking the limit operations for (24) and (26) and applying (78) and (79) yields that , so that taking the limit operations for (26) and (29) yields (88) and (89). The proof is completed. □
Theorem 9.
For multisensor uncertain time-invariant system (1) and (2) with Assumptions 1–2, if each subsystem with conservative noise variancesandis completely observable and completely controllable, the actual steady-state SCI fusion Kalman filter is given as
where the weighting coefficients can be computed recursively by
and it is robust in the sense that for all admissible uncertaintiesandsatisfying , we have
It is called the robust steady-state SCI fusion Kalman filter.
Proof.
As , taking the limit operations for (45)–(47), and (53) yields (90)–(92), and (96). From (48)–(50), we have (93)–(95). The proof is completed. □
Theorem 10.
Under the conditions of Theorem 7, if the measurement data ofare bounded, then the robust local time-varying and steady-state Kalman filtersandgiven by (6) and (72) have each other the convergence in a realization, such that
Proof.
Setting , in (6), applying (82) yields , , as . Subtracting (72) from (6), and defining , we have
with . Noting that is uniformly asymptotically stable, and is bounded, applying Lemma 3 to (6) yields the boundedness of . Hence, we have . Applying Lemma 3 to (98), noting that is a stable matrix, so it is also uniformly asymptotically stable, hence , i.e., the convergence (97) holds. The proof is completed. □
Theorem 11.
Under the conditions of Theorem 10, the robust time-varying and steady-state SCI fusersandhave each other the convergence in a realization, such that
Proof.
From (87), the minimal value point of is obtained by solving nonlinear equations
According to the existence theorem [36] of implicit function, in a sufficiently small neighborhood of the point with the definition , , can be represented by a -dimension continuous function of all elements of as
Applying (78) with yields , as . Hence for sufficiently larger , we have
where are defined in (25). According to the continuity of , if follows
and applying (48)–(50) and (93)–(95) yields
Defining
Applying (78) with , (46), (91) and (104) yields , as , which yields .
Subtracting (85) from (45) and applying (105) yields
Applying (82) yields the boundedness of , and applying the boundedness of yields that is bounded. Noting that is uniformly asymptotically stable [40]. Applying Lemma 3 to (6) yields that is bounded. Hence applying (97), (106) and yields (99). The proof is completed. □
Theorem 12.
Under the conditions of Theorem 10, the robust accuracy comparison of the local and the fused robust steady-state Kalman filters is given by
Proof.
Applying (78), (79), (103) and (104) yields that . As , taking the limit operations for (54)–(58) yields Theorem 12. The proof is completed. □
6. Sensitivity Problem
For the SCI fusion robust Kalman filter, the fused schemes are different with respect to different orders of sensors. For example, in the case where there are three fused structures as shown in Figure 2, the problem is that whether the SCI fused robust accuracy is sensitive with respect to the fused orders of sensors. The following two sensor simulation examples will show that the robust accuracy of the SCI fuser is not very sensitive with respect to the orders of the sensors.
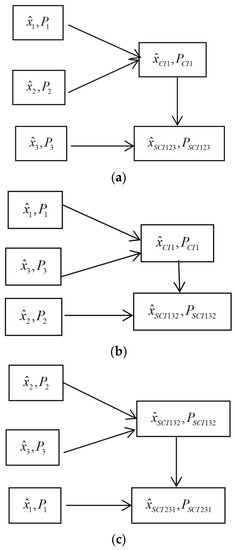
Figure 2.
The fused orders of the SCI fusers in the case. (a) The order 1: SCI123; (b) The order 2: SCI132; (c) The order 3: SCI231.
7. Simulation Examples
Example 1.
Consider a 3-sensor tracking system with uncertain noise variances
whereis the sampled period,is the state,andare the position and velocity of target at time. is the measurement,andare independent Gaussion white noises with zero mean and unknown variancesand, respectively,andare conservative upper bounds ofandsatisfying. In the simulation, we take , , ,,,,,.
The traces of the conservative and actual local robust filtering error variances are compared in Figure 3. For Figure 3, we see that the traces of the local and fused robust time-varying Kalman filters quickly converge to these of the corresponding steady-state Kalman filters, which verify the robust accuracy relations (54)–(58), and their steady-state robust and actual accuracy relations (107)–(110).
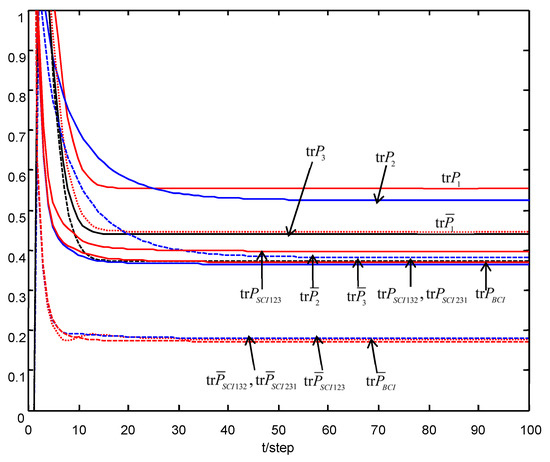
Figure 3.
The robust accuracy relations of the local and fused robust Kalman filters.
The robust and actual accuracy comparisons are shown in Table 3 and Table 4. From Table 3 and Table 4, we see that the SCI fused robust accuracy , and are close or equal to the BCI fused robust accuracy , and the accuracy of the SCI fuser is not very sensitive with respect to the orders of sensor. We also see that the actual accuracy of the SCI fuser, and , and are close to or equal to the actual accuracy of the BCI fuser ; they are all higher than the robust accuracy of each local filter, which verify the accuracy relations (54)–(58) and their steady-state robust and actual accuracy relations (107)–(110).
Table 3.
The accuracy comparison of local and fused robust time-varying Kalman filters at .
Table 4.
The robust accuracy comparison of local and fused steady-state Kalman filters.
In order to give a geometric interpretation of the accuracy relations, The covariance ellipses of the robust time-varying Kalman filters at time and robust steady-state Kalman filters are shown in Figure 4, Figure 5, Figure 6, Figure 7, Figure 8 and Figure 9.
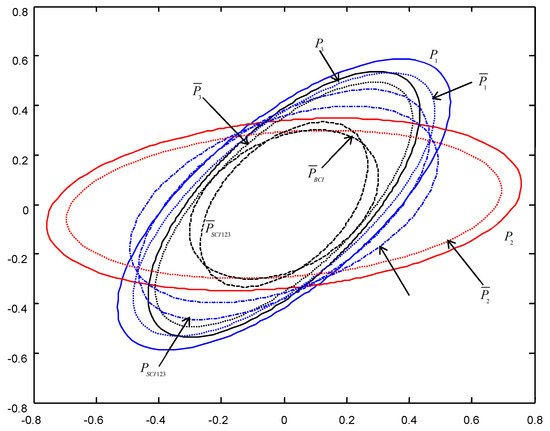
Figure 4.
The ellipses of the actual and conservative time-varying filtering error variances of the order at .
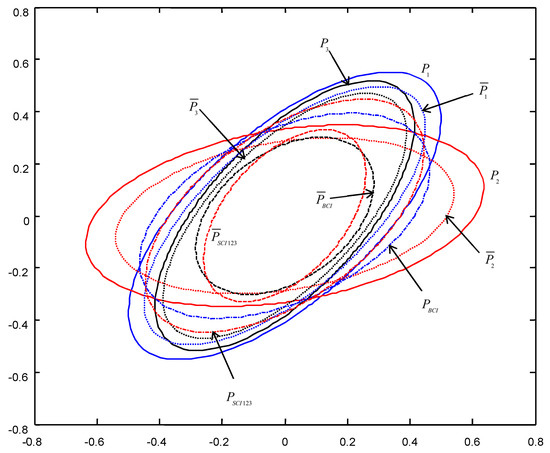
Figure 5.
The ellipses of the actual and conservative steady-state filtering error variances of the order .
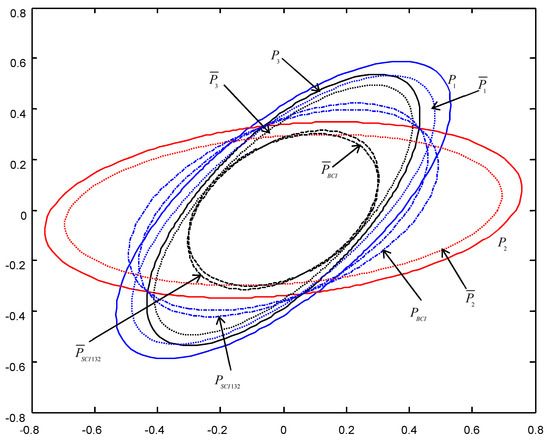
Figure 6.
The ellipses of the actual and conservative time-varying filtering error variances of the order at .
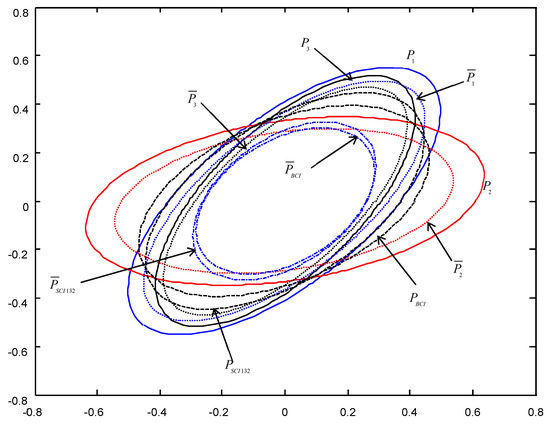
Figure 7.
The ellipses of the actual and conservative steady-state filtering error variances of the order .
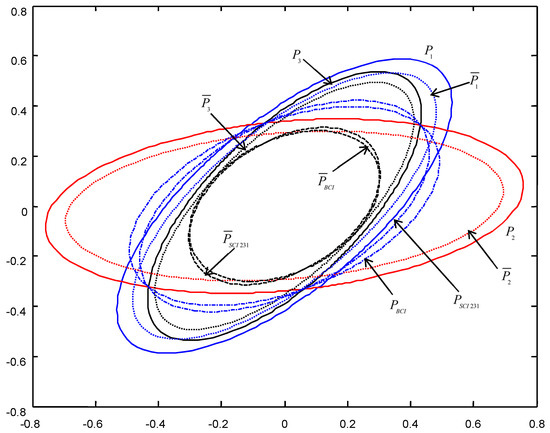
Figure 8.
The ellipses of the actual and conservative time-varying filtering error variances of the order at .
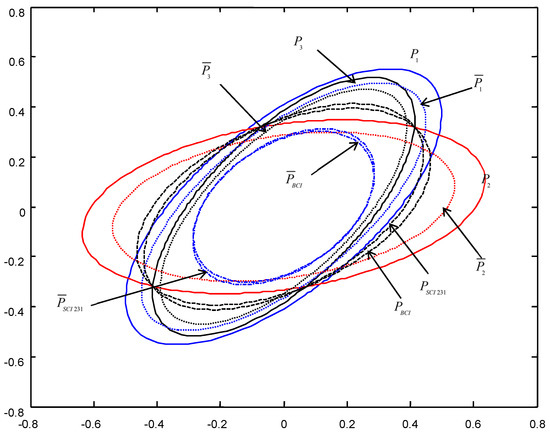
Figure 9.
The ellipses of the actual and conservative steady-state filtering error variances of the order .
From Figure 4, Figure 5, Figure 6, Figure 7, Figure 8 and Figure 9, we see that the ellipses of the actual variances are all enclosed in that of the conservative variances , respectively, which verify the robustness (17). The ellipses of actual BCI and SCI fused variances and are respectively enclosed in those of and , which verifies the robustness (29) and (53). Moreover, we see that the ellipse of is close to or equal to that of , the ellipse of is close to or equal to that of , which means that the robust accuracies of the SCI fusers with different orders of sensors are close to those of the BCI fusers, and the robust and actual accuracies of the SCI fusers are not very sensitive to the orders of sensors.
In order to verify the above theoretical accuracy relations, taking runs, the mean square error (MSE) value at time of the local and fused robust Kalman filters are shown in Figure 10. From Figure 10, we see that when is sufficiently large, we have the accuracy relations
and the curves of are close to the straight lines corresponding to , which verify the robust accuracy relations (107) and the robust accuracy relations in Table 3.
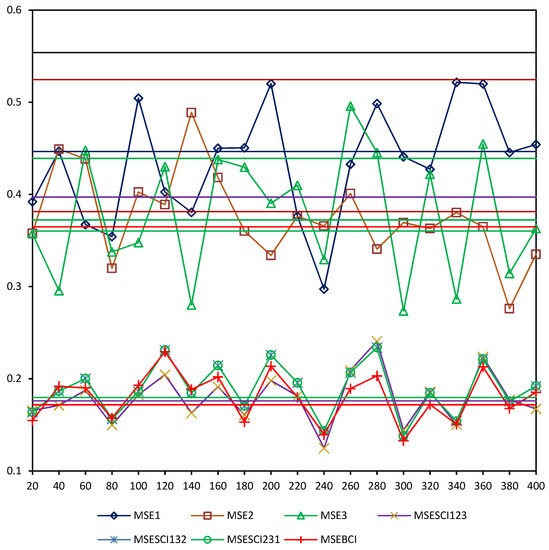
Figure 10.
The comparison of and , .
Example 2.
In order to show the sensitivity of the actual and robust accuracies for the SCI fuser with respect to the orders of sensors, consider a 4-sensor tracking system with uncertainties of noise variances
In the simulation,
Similar to Figure 3, for the sensor number , there are 12 fused orders as follows:
SCI1234, SCI1243, SCI1324, SCI1342, SCI1423, SCI1432,
SCI2314, SCI2341, SCI2413, SCI2431, SCI3412, SCI3421
SCI2314, SCI2341, SCI2413, SCI2431, SCI3412, SCI3421
Table 5 shows the sensitivity of the actual and robust accuracies for the SCI fuser with respect to the orders of sensors
Table 5.
The sensitivity of the actual and robust accuracies for the SCI fuser with respect to the orders of sensors.
From Table 5, we see that all values of or are close to these of or , respectively. This means that the robust or actual accuracies of the SCI fusers are not very sensitive to the orders of sensors.
8. Conclusions
Sequential covariance intersection fusion robust time-varying Kalman filters are presented for the multi-sensor systems with uncertainties of noise variances, the main contributions of this paper are as follows:
A minimax robust estimation approach of designing the robust local, BCI and SCI fused Kalman filters has been presented for the multisensor system with uncertain noise variances. For the multisensor time-invariant systems with uncertain noise variances, the convergence problem of the robust local and fused time-varying Kalman filters has been solved. The robust local, BCI and SCI fused steady-state Kalman filters have been presented by replacing the time-varying gains, variances and cross-covariances with their limits, respectively. The convergence in a realization of the local and fused time-varying and steady-state Kalman filters was proved by the dynamic error system analysis (DESA) method [39] and the dynamic variance error system analysis (DVESA) method [40].
The proposed results can be applied to some simulation application research, including target tracking systems, uninterruptible power supply systems, mass spring random vibration systems, and so on. The proposed results are limited to multisensor systems with uncertainties of noise variances. The extensions of the proposed results to multisensor systems with uncertainties of both model parameters and noise variances are under investigation.
Author Contributions
Conceptualization, W.Q.; software, S.W.; formal analysis, W.Q.; investigation, W.Q.and S.W.; resources, W.Q.; data curation, W.Q.and S.W.; writing—original draft preparation, W.Q.; writing—review and editing, W.Q. and S.W.; supervision, S.W.; project administration, S.W.; funding acquisition, W.Q. and S.W. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by the Natural Science Foundation of China under grant (No. 61703147) and the Natural Science Foundation of Heilongjiang Province under Grant (No. LH2021E100).
Acknowledgments
The authors thank the reviewers and editors for their helpful and constructive comments which are very valuable for improving quality of this paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Cui, L.L.; Wang, X.; Wang, H.Q.; Ma, J.F. Research on Remaining Useful Life Prediction of Rolling Element Bearings Based on Time-VaryingKalman Filter. IEEE Trans. Instrum. Meas. 2020, 69, 2858–2867. [Google Scholar] [CrossRef]
- Stefano, M.; Nicola, P. Improved Tracking and Docking of Industrial Mobile Robots Through UKF Vision-Based Kinematics Calibration. IEEE Access 2021, 9, 127664–127671. [Google Scholar]
- Stepanov, O.A. Kalman filtering: Past and present. An outlook from Russia. (On the occasion of the 80th birthday of Rudolf Emil Kalman). Gyroscopy Navig. 2011, 2, 99–110. [Google Scholar] [CrossRef]
- Petersen, I.R.; Savkin, A.V. Robust Kalman Filtering for Signals and Systems with Large Uncertainties; Birkhauser: Boston, MA, USA, 1999. [Google Scholar]
- Carlson, N.A. Federated filter for fault-tolerant integrated navigation systems. In Proceedings of the IEEE PLANS’88, Position Location and Navigation Symposium, Record, ‘Navigation into the 21st Century’, Orlando, FL, USA, 29 November–2 December 1988; pp. 110–119. [Google Scholar]
- Tupysev, V.A.; Litvinenko, Y.A. The effect of the local filter adjustment on the accuracy of federated filters. IFAC-PapersOnLine 2015, 48, 339–344. [Google Scholar] [CrossRef]
- Maier, A.; Kiesel, S.; Trommer, G.F. Performance Analysis of Federated Filter for SAR/TRN/GPS/INS Integration. Gyroscopy Navig. 2011, 2, 203–300. [Google Scholar] [CrossRef]
- Lewis, F.L.; Xie, L.H.; Popa, D. Optimal and Robust Estimation, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Rocha, K.D.; Terra, M.H. Robust Kalman filterfor systems subject to parametric uncertainties. Syst. Control. Lett. 2021, 157, 1–10. [Google Scholar] [CrossRef]
- Xie, L.H.; Soh, Y.C.; Souza, C.E. Robust Kalman filtering for uncertain discret-time systems. IEEE Trans. Autom. Control 1994, 39, 1310–1314. [Google Scholar]
- Theodor, Y.; Sharked, U. Robust discrete-time minimum-variance filtering. IEEE Trans. Signal Processing 1996, 44, 181–189. [Google Scholar] [CrossRef]
- Ebihara, Y.; Hagivara, T. A dilated LMI approach to robust performance analysis of linear time-invariant uncertain systems. Automatica 2005, 41, 1933–1941. [Google Scholar] [CrossRef]
- Xie, L.H.; Lu, L.L.; Zhang, D.; Zhang, H.S. Improved robust H2 and H∞ filtering for uncertain discrete-time system. Automatica 2004, 40, 873–880. [Google Scholar] [CrossRef]
- Feng, J.X.; Wang, Z.D.; Zeng, M. Distrbuted weighted fusion robust Kalman filter fusion for uncertain systems with autocorrelated and cross-correlated noises. Inf. Fusion 2013, 14, 78–86. [Google Scholar] [CrossRef]
- Chen, B.; Yu, L.; Zhang, W.A.; Liu, A.D. Distributed robust Kalman filtering for uncertain stochastic systems with random delays and missing measurements. In Proceedings of the 2011 Asian Control Conference (ASCC), Kaohsiung, Taiwan, 15–18 May 2011; pp. 1288–1293. [Google Scholar]
- Zhang, M.; Cui, P. Multi-sensor optimal robust information fusion for uncertain systems with colored noises. In Proceedings of the 2009 4th IEEE Conference on Industrial Electronics and Applications, Xian, China, 25–27 May 2009; pp. 1220–1224. [Google Scholar]
- Qu, X.M.; Zhou, J. The optiaml robust finite-horizon Kalman filtering for multiple sensors with different stochastic failure rates. Appl. Math. Lett. 2013, 26, 80–86. [Google Scholar] [CrossRef]
- Liggins, M.E.; Hall, D.L.; Llinas, J. Handbook of Multisensor Data Fusion. In Theory and Practice, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Wang, S.G.; Bi, Y.L.; Qi, W.J.; Li, B.H.; Cai, K. Non-fragile load frequency control of multi-area power system with energy storage system and wind power subject to circular pole constraints. Sustain. Energy Technol. Assess. 2021, 45, 1–9. [Google Scholar] [CrossRef]
- Huang, G.Q. Visual-inertial navigation: A concise review. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Xian, China, 25–27 May 2019. [Google Scholar]
- Nam, D.V.; Kim, G.W. Robust stereo visual-inertial navigation system based on multi-stage outlier removal in dynamic environments. Sensors 2020, 20, 2922. [Google Scholar] [CrossRef] [PubMed]
- Deng, Z.L.; Zhang, P.; Qi, W.J.; Gao, Y.; Liu, J.F. The accuracy comparison of multisensor covariance intersection fuser and three weighting fusers. Inf. Fusion 2013, 14, 177–185. [Google Scholar] [CrossRef]
- Sun, S.L.; Deng, Z.L. Multi-sensor optimal information Kalman filter. Automatica 2004, 40, 1017–1023. [Google Scholar] [CrossRef]
- Sun, X.J.; Deng, Z.L. Information fusion Wiener filter for the multisensor multichannel ARMA signals with time-delayed measurements. Signal Processing 2009, 3, 403–415. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlman, J.K. Non-divergent estimation algorithm in the presence of unknown correlations. Am. Control. Conf. 1997, 4, 2369–2373. [Google Scholar]
- Julier, S.J.; Uhlman, J.K. General decentralized data fusion with Covariance Intersection. In Handbook of Multisensor Data Fusion, Theroy and Practice, 2nd ed.; Liggins, M.E., Hall, D.L., Llinas, J., Eds.; CRC Press: Boca Raton, FL, USA, 2009; pp. 319–342. [Google Scholar]
- Uhlman, J.K. Covariance consistency methods for fault-tolerant distributed data fusion. Inf. Fusion 2003, 4, 201–205. [Google Scholar] [CrossRef]
- Uhlman, J.K. General data fusion for estimates with unknown cross-covariances. In Proceedings of the SPIE Aerosense Confeorence, Orlando, FL, USA, 8–12 April 1996; pp. 165–173. [Google Scholar]
- Julier, S.J.; Uhlman, J.K. Using covariance intersection for SLAM. Robot. Auton. Syst. 2007, 55, 3–20. [Google Scholar] [CrossRef]
- De, J.C.B.; Ferreira, C.; Waldman, J. Covariance intersection-based sensor fusion for sounding roket tracking and impact area prediction. Control. Eng. Pract. 2007, 15, 389–409. [Google Scholar]
- Arambel, P.O.; Rago, C.; Mehra, R.K. Covariance intersection algorithm for distributed spacecraft state estimation. Processings Am. Control. Conf. 2001, 6, 4398–4403. [Google Scholar]
- Guo, Q.; Chen, S.Y.; Leung, H.R.; Liu, S.T. Covariance intersection based image fusion technology with application to pansharpening in remote sensing. Inf. Sci. 2010, 180, 3434–3443. [Google Scholar] [CrossRef]
- Lazarus, S.B.; Ashokaraj, I.; Tshurdos, S.; Zbikwski, R.; Silson, P.M.G.; Aouf, N.; White, B.A. Vehicle localization using sensors data fusion via integration of covariance intersection and interval analysis. IEEE Sens. J. 2009, 7, 1302–1314. [Google Scholar] [CrossRef]
- Deng, Z.L.; Zhang, P.; Qi, W.J.; Liu, J.F.; Gao, Y. Sequential covariance intersection fusion Kalman filter. Inf. Sci. 2012, 189, 293–309. [Google Scholar] [CrossRef]
- Qu, X.M.; Zhou, J.; Song, E.B.; Zhu, Y.M. Minimax robust optimal estimation fusion in distributed multisensor systems with uncertainties. IEEE Signal Prrocessing Lett. 2008, 17, 811–814. [Google Scholar]
- Eldar, Y.C.; Beck, A.; Teboulle, M. A minimax chebyshev estimator for bounded error estimation. IEEE Trans. Signal Processing 2008, 56, 1388–1397. [Google Scholar] [CrossRef][Green Version]
- Deng, Z.L.; Gao, Y.; Li, C.B.; Hao, G. Self-tuning decoupled information fusion Wiener state component filters and their convergence. Automatica 2008, 44, 685–695. [Google Scholar] [CrossRef]
- Ran, C.J.; Tao, G.L.; Liu, J.F.; Deng, Z.L. Self-tuning decoupled fusion Kalman predictor and its convergence analysis. IEEE Sens. J. 2009, 9, 2024–2032. [Google Scholar] [CrossRef]
- Kailath, T.; Sayed, A.H.; Hassibi, B. Linear Estimation; Prentice Hall: New York, NY, USA, 2000. [Google Scholar]
- Kamen, E.W.; Su, J.K. Introduction to Optimal Estimation; Springer: London, UK, 1999. [Google Scholar]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).