
A Comprehensive Review of Micro UAV Charging Techniques

 ,
,  ,
,  ,
, 

Abstract
:1. Introduction

2. Related Works
3. Battery Charging Techniques for UAVs
3.1. Battery-Powered UAVs
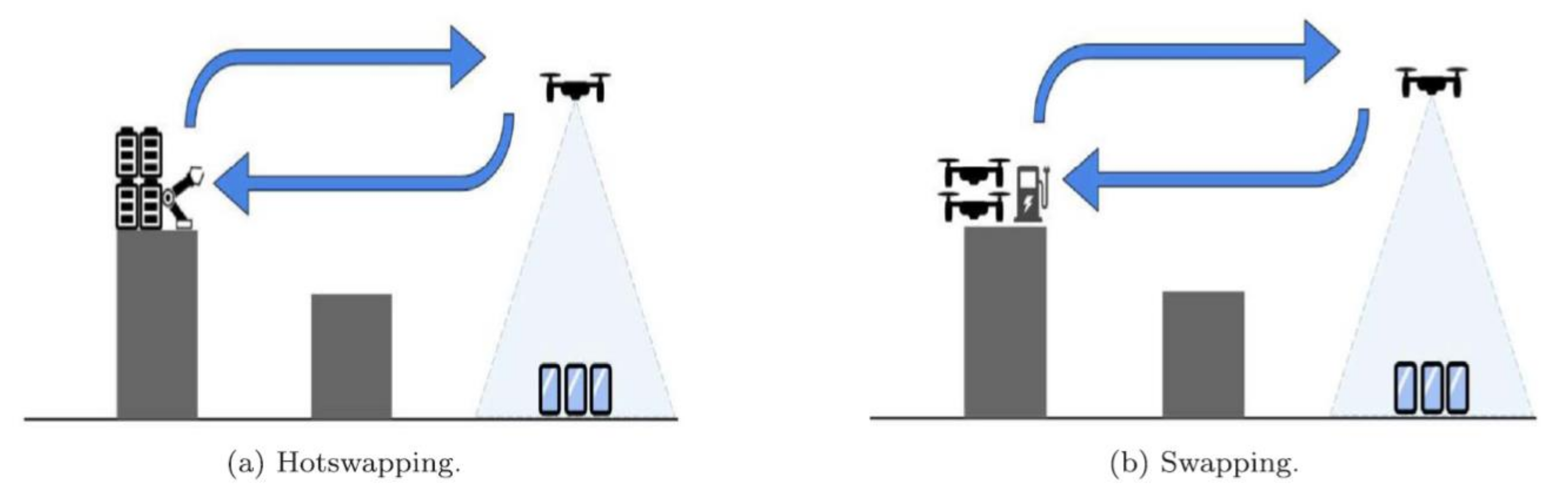
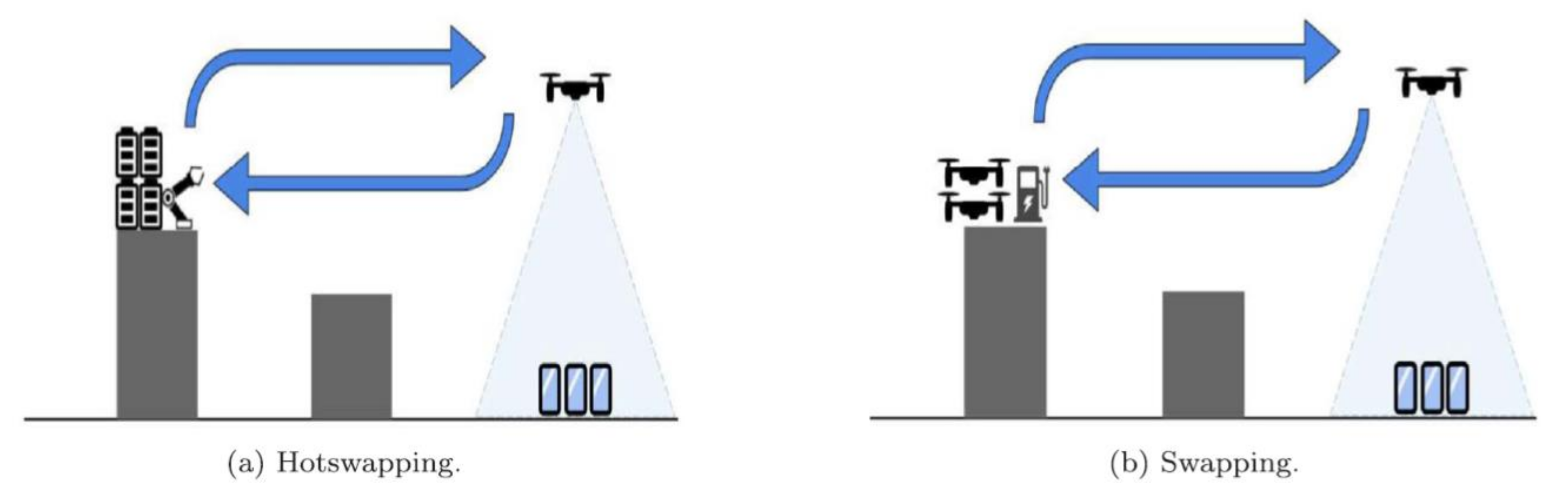
3.2. Battery Swapping
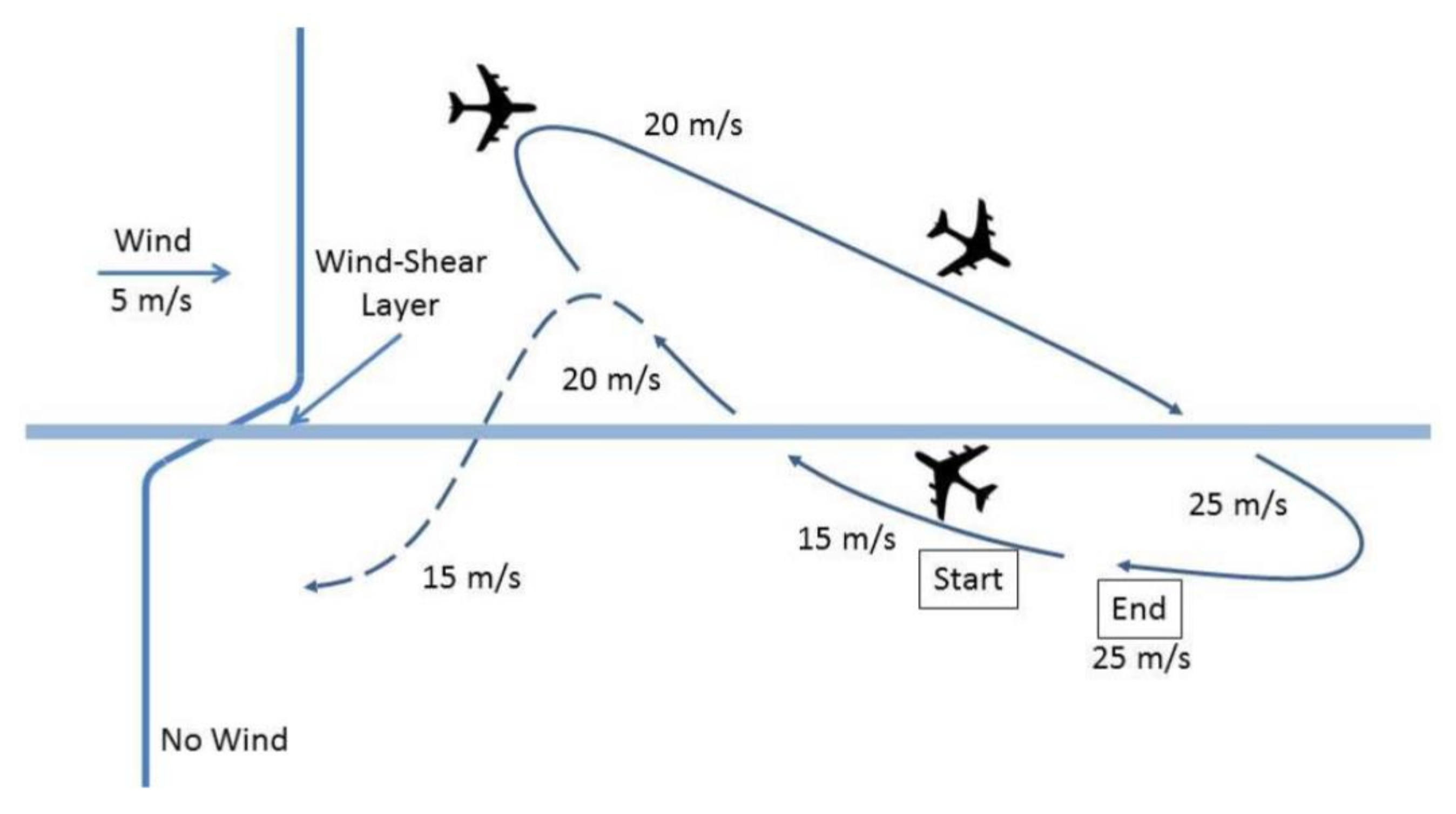
3.3. Dynamic Soaring
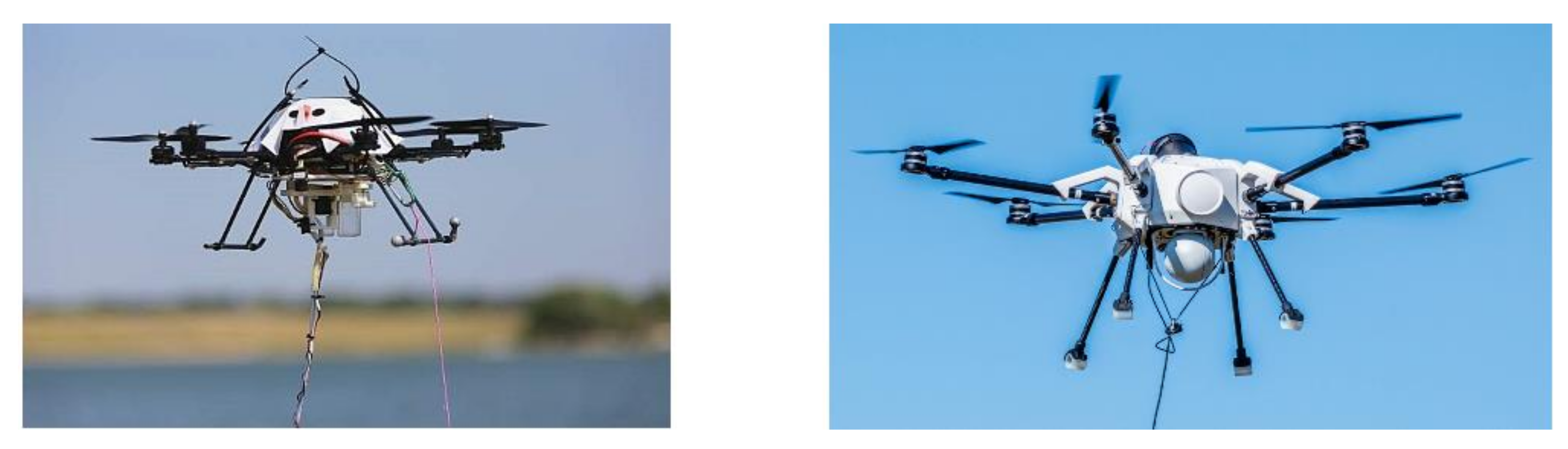
3.4. Tethered UAVs
3.5. Charging from a Power Line
3.6. Fuel Cell (FC)
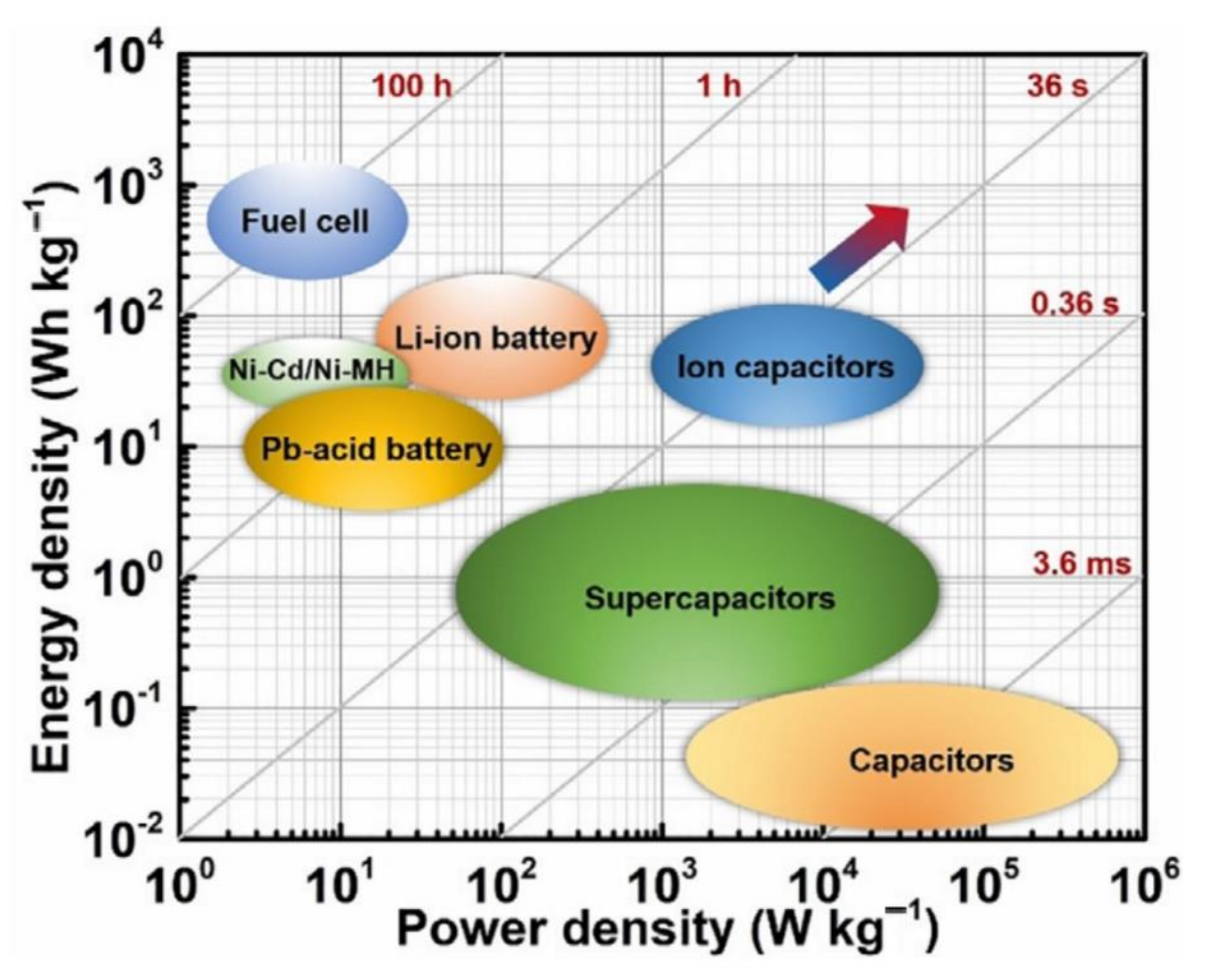
3.7. Super Capacitor (SC)
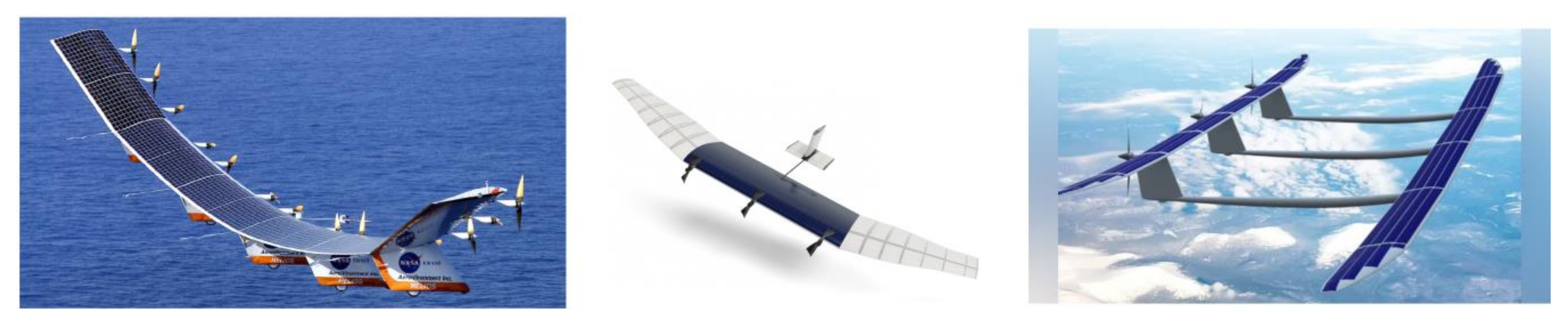
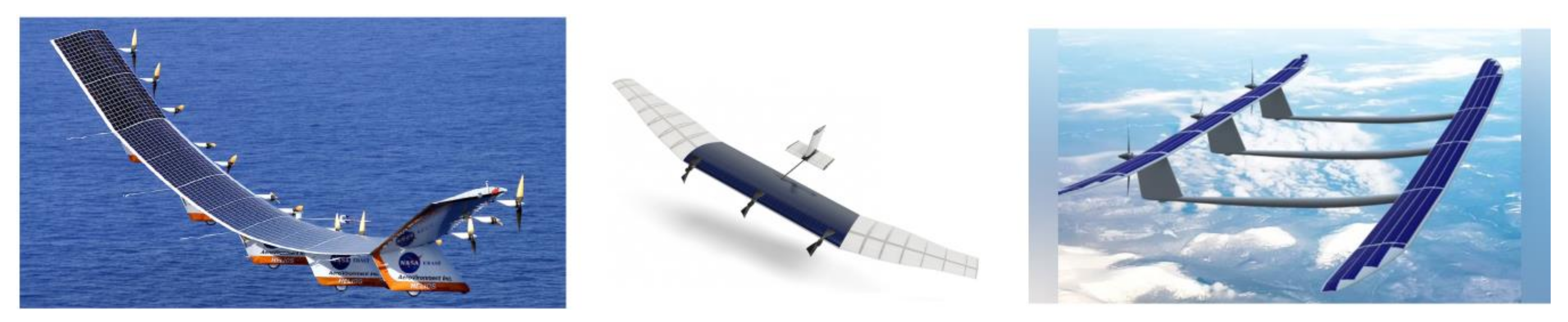
3.8. Photovoltaic Cell-Based UAV Charging
4. Wireless Power Transfer (WPT)
4.1. Laser Power Transfer (LPT)
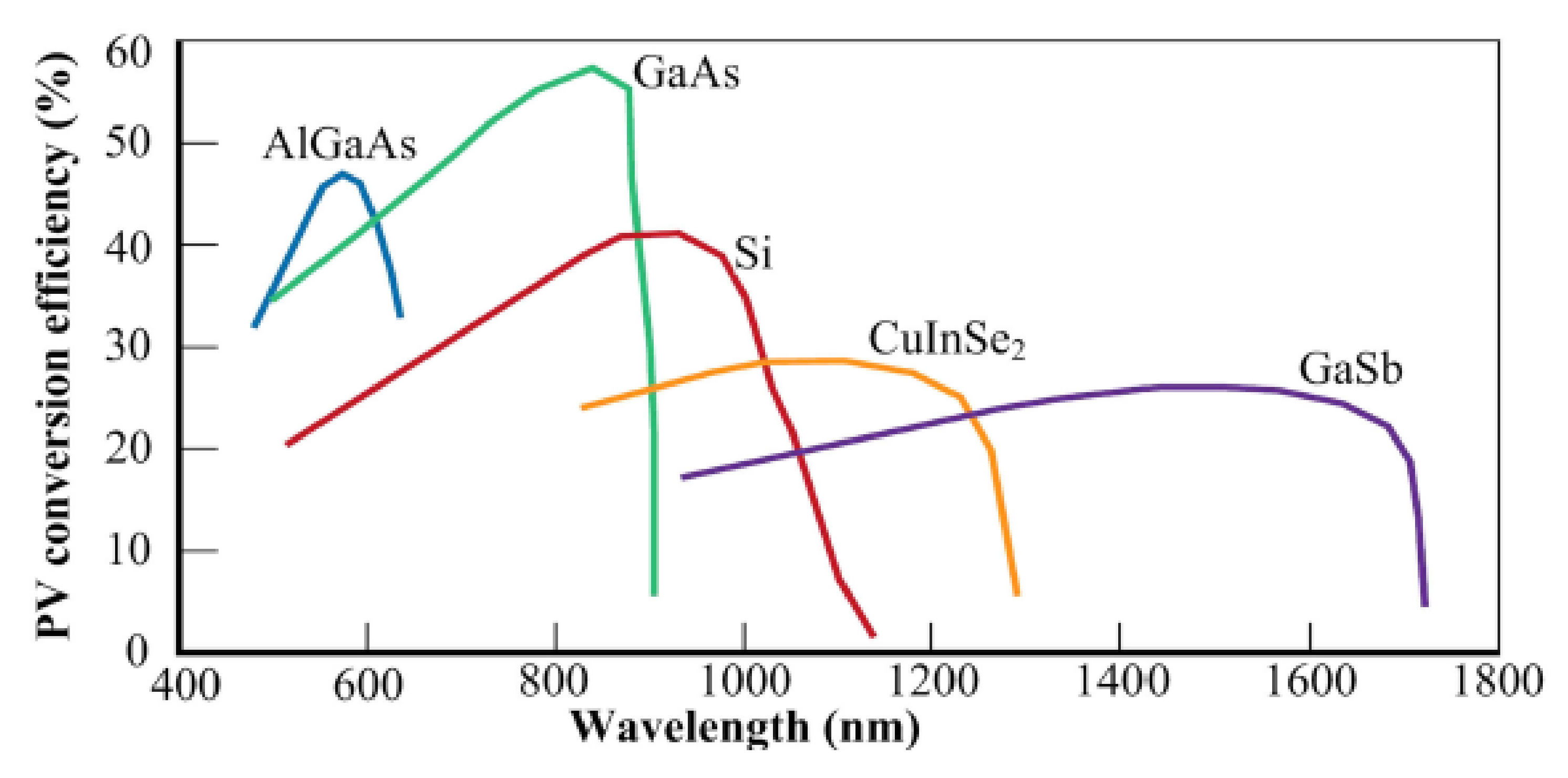
4.1.1. PV Cell Selection
4.1.2. Laser Selection
- Directionality: typically, the laser beam gives a low divergence.
- Coherence: The emitted photons are coherent and carry a constant phase relationship.
- Monochromaticity: laser beams contain a narrow range of wavelengths.
5. Distributed Laser Charging (DLC) for UAVs
DLC Characteristics
- (1)
- EMI-Free: There is no leakage of power outside the resonating beam in DLC. In contrast to other WPT techniques, DLC does not impose RF radiations. Thus, it does not inflict EMI on nearby electronic devices.
- (2)
- Compact Size: In DLC, the beam diameter is almost one millimeter and the receiver can be compact in size e.g., a smartphone camera.
- (3)
- Visibility Agnostic: DLC can depend on visible, as well as ultraviolet (UV) and infrared (IR), lasers. Both IR and UV laser beams are invisible, which is suitable for some applications because it does not impose visible light interference. This visibility agnostic feature of DLC makes it reliable and flexible in different applications.
- (4)
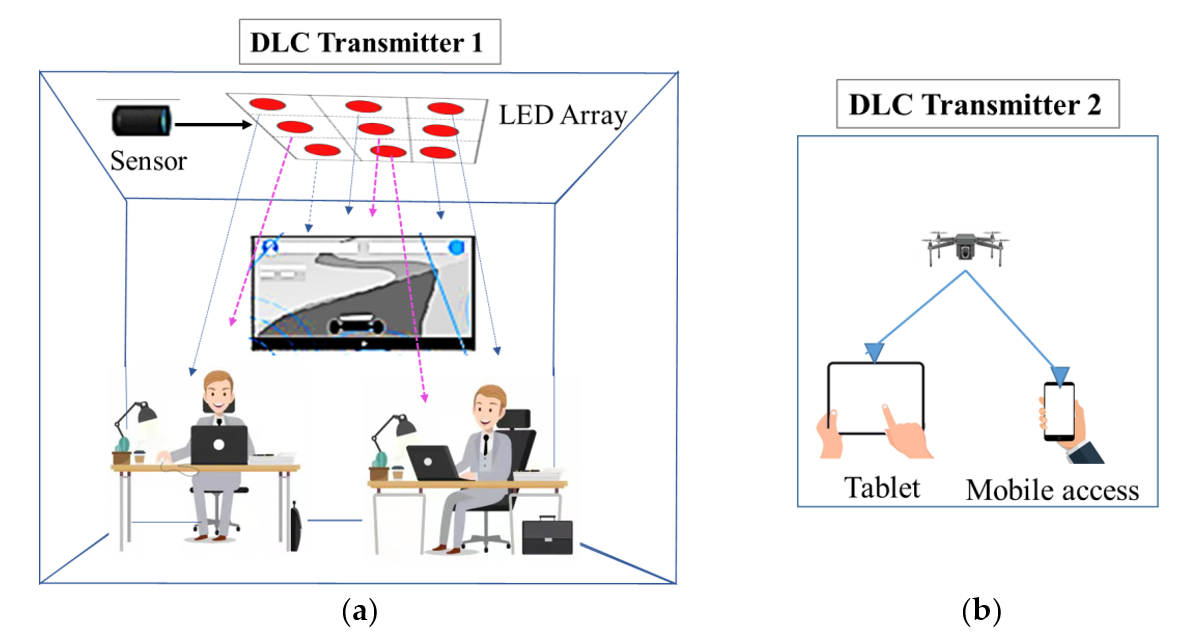
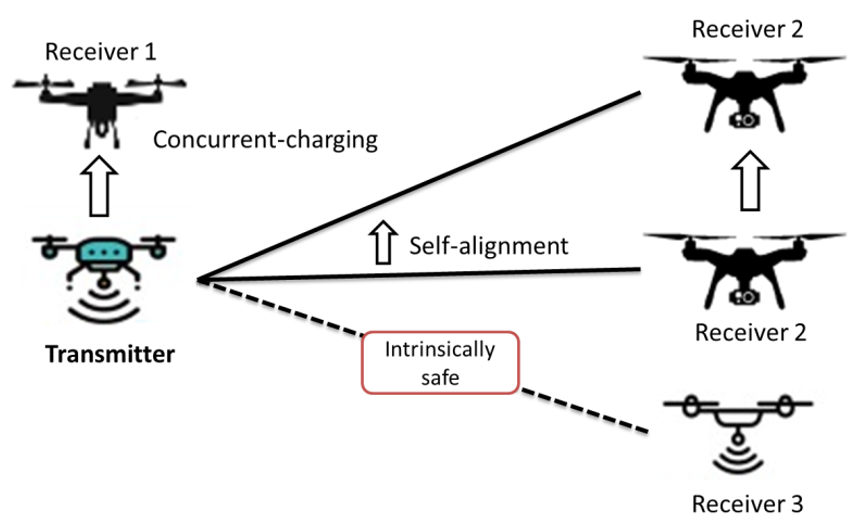
- Concurrent Wireless Charging: A DLC system generates a resonating beam when a receiver is exposed to the LOS path of the transmitter. Hence, a single transmitter has the capability to create several resonating beams pointed towards multiple receivers, which enables concurrent WPT from one transmitter to multiple receivers.
- (5)
- Intrinsically Safe: The DLC power level can reach up to tens of watts which raises safety concerns. However, the spatially distributed resonator structure of DLC makes it different from integrated resonating lasers. In DLC, when an obstacle comes into the resonating beam path, the laser is curtailed immediately without any additional decision-making circuit.
- (6)
- Self-Aligning: In DLC, the charging process continues as the LOS path remains between the transmitter and receiver components. In such a scenario, the distributed resonator is capable of generating a resonating beam without any tracking or aiming feature. No user assistance in starting the charging process in DLC leads to a Wi-Fi-type experience. Several features of DLC. including concurrent charging, self-aligning and intrinsic safety, are shown in Figure 13.
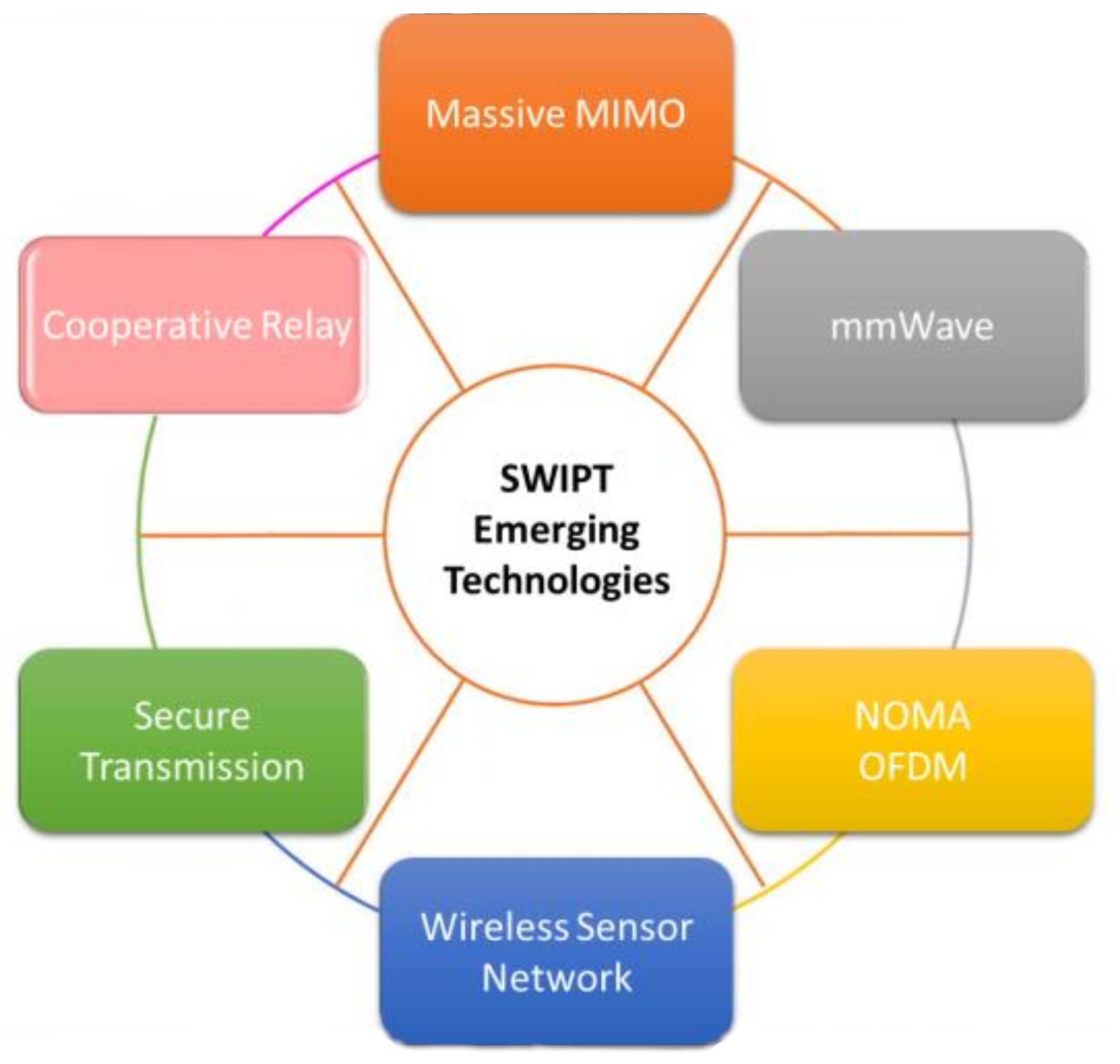
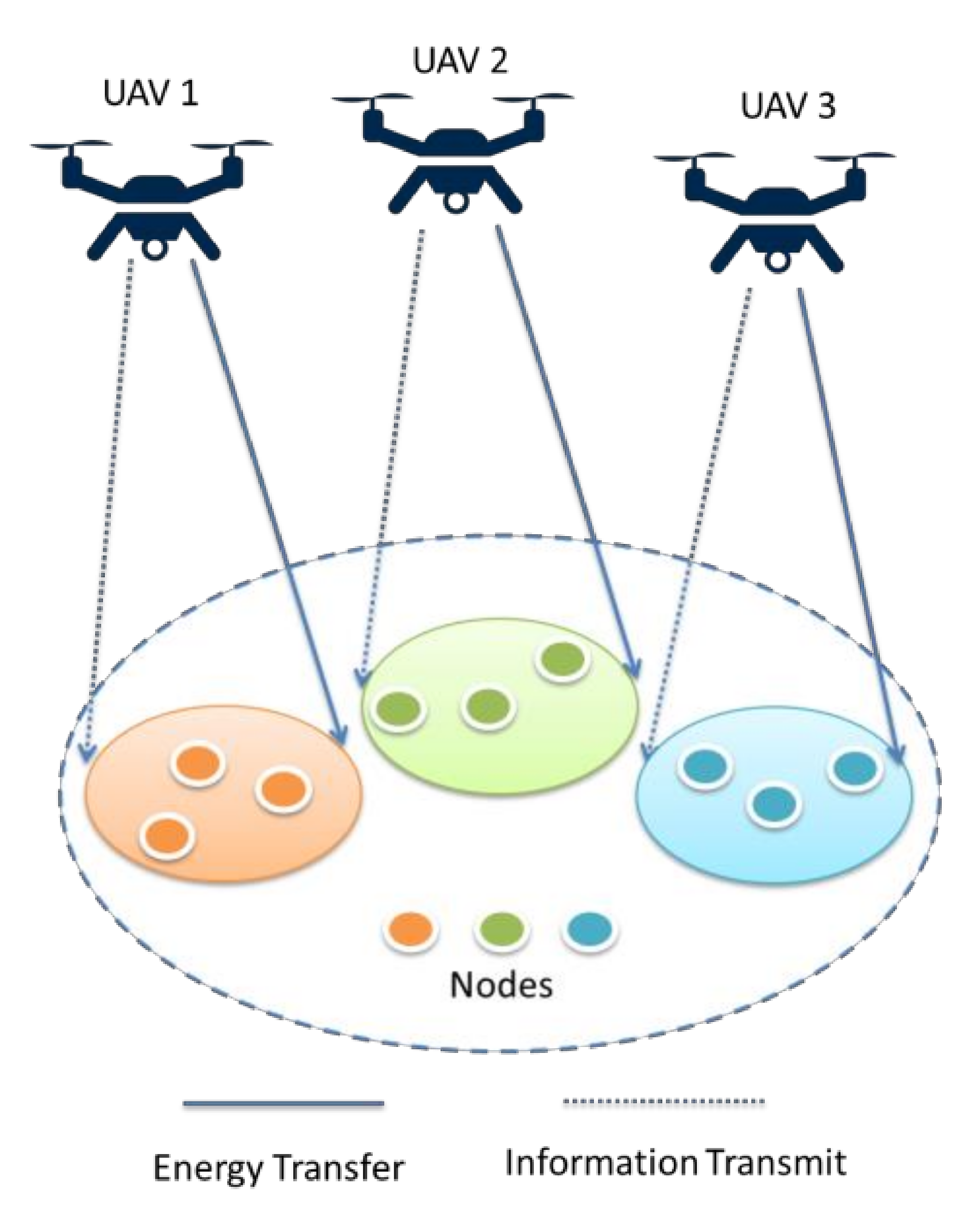
6. Simultaneous Wireless Information and Power Transfer (SWIPT)
- (1)
- Time switching (TS)
- (2)
- Power splitting (PS)
- (3)
- Antenna switching (AS)
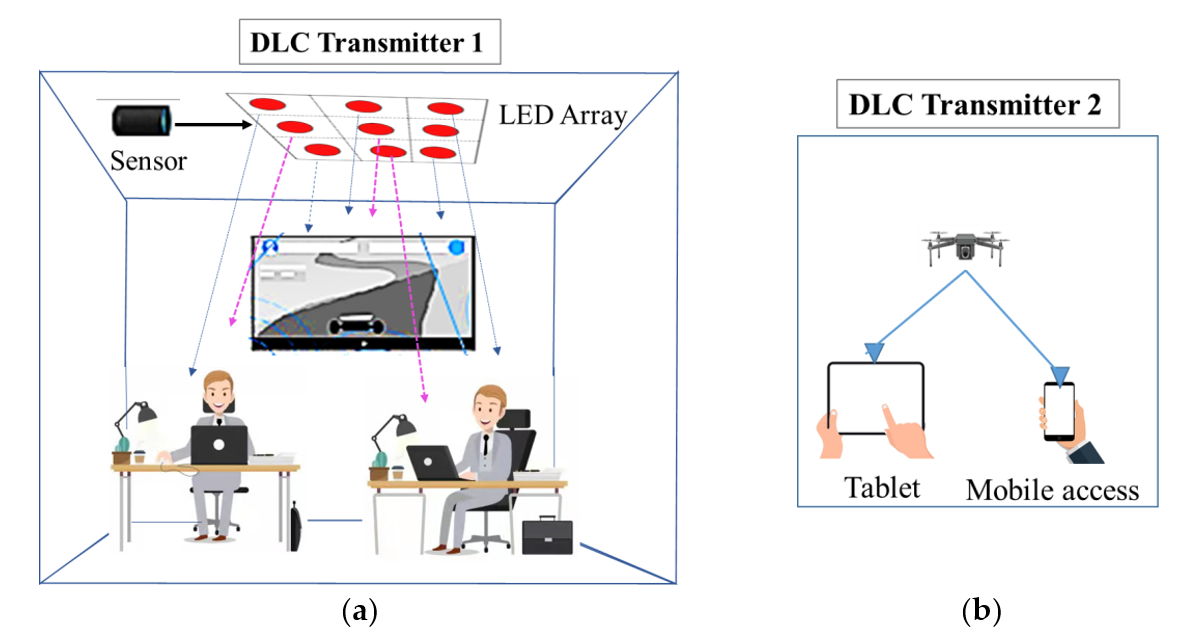
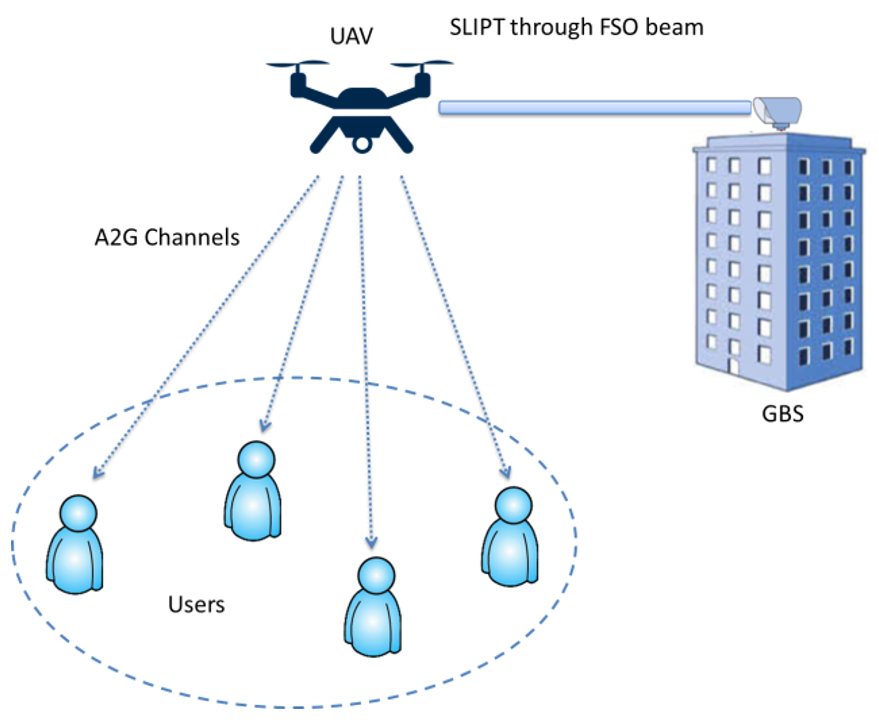
7. Simultaneous Lightwave Information and Power Transfer (SLIPT)
8. Potential Challenges in UAV Charging Techniques
8.1. Efficiency Improvement Issue
8.2. Safety Concerns
8.3. Laser Beam Control Measures
8.4. Optical Communication Problem
8.5. Propagation Losses in the Optical Beam
- Water and dust particles which absorb and scatter photons.
- The wave fronts are distorted due to the refraction index of air, which is affected by the gradients in the air caused by temperature and wind.
- Waves expanding beyond the optic’s ability to collimate.
8.6. The Tracking and Aiming
8.7. The PV Panel
8.8. The Maximum Power Point Tracking Algorithm
8.9. Energy Efficiency
8.10. Technological Cost and Complexity
8.11. Vulnerability to Weather Conditions
8.12. Lack of Dynamic Power Load Balancing
8.13. Survivability and Battery Life
8.14. Joint Scheduling under Mixed Recharging Mode
8.15. Fast and On-Demand UAV Recharging
8.16. Route and Charging Scheduling of UAVs and UGVs
8.17. Route Planning
9. Future Research Directions
10. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Hassija, V.; Saxena, V.; Chamola, V. Scheduling drone charging for multi-drone network based on consensus time-stamp and game theory. Comput. Commun. 2019, 149, 51–61. [Google Scholar] [CrossRef]
- Yoo, W.; Yu, E.; Jung, J. Drone delivery: Factors affecting the public’s attitude and intention to adopt. Telemat. Inform. 2018, 35, 1687–1700. [Google Scholar] [CrossRef]
- Macrina, G.; Pugliese, L.D.P.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Part C Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Chittoor, P.K.; Chokkalingam, B.; Mihet-Popa, L. A Review on UAV Wireless Charging: Fundamentals, Applications, Charging Techniques and Standards. IEEE Access 2021, 9, 69235–69266. [Google Scholar] [CrossRef]
- Tran, D.H.; Vu, T.X.; Chatzinotas, S.; ShahbazPanahi, S.; Ottersten, B. Coarse trajectory design for energy mini-mization in UAV-enabled. IEEE Trans. Veh. Technol. 2020, 69, 9483–9496. [Google Scholar] [CrossRef]
- Abdulla, A.E.A.A.; Fadlullah, Z.M.; Nishiyama, H.; Kato, N.; Ono, F.; Miura, R. Toward Fair Maximization of Energy Efficiency in Multiple UAS-Aided Networks: A Game-Theoretic Methodology. IEEE Trans. Wirel. Commun. 2014, 14, 305–316. [Google Scholar] [CrossRef]
- Drone Market Report; Drone Ind. Insights UG: Hamburg, Germany,, 2024.
- Hoseini, S.A.; Hassan, J.; Bokani, A.; Kanhere, S.S. In Situ MIMO-WPT Recharging of UAVs Using Intelligent Flying Energy Sources. Drones 2021, 5, 89. [Google Scholar] [CrossRef]
- Tran, D.H.; Vu, T.X.; Chatzinotas, S.; ShahbazPanahi, S.; Ottersten, B. Trajectory design for energy minimization in uav-enabled wireless communications with latency constraints. arXiv 2019, arXiv:1910.08612. [Google Scholar]
- Hoseini, S.A.; Bokani, A.; Hassan, J.; Salehi, S.; Kanhere, S.S. Energy and service-priority aware trajec-tory design for UAV-BSs using double Q-learning. In Proceedings of the 2021 IEEE 18th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2021; pp. 1–4. [Google Scholar]
- Bushnaq, O.M.; Kishk, M.A.; Celik, A.; Alouini, M.-S.; Al-Naffouri, T.Y. Optimal Deployment of Tethered Drones for Maximum Cellular Coverage in User Clusters. IEEE Trans. Wirel. Commun. 2020, 20, 2092–2108. [Google Scholar] [CrossRef]
- Li, L.; Wen, X.; Lu, Z.; Jing, W.; Zhang, H. Energy-efficient multi-UAVs deployment and movement for emergency response. IEEE Commun. Lett. 2021, 25, 1625–1629. [Google Scholar] [CrossRef]
- Shukla, H. This Wireless Power Technology Could Change New Zealand’s Transmission System. 2020. Available online: https://mercomindia.com/this-wireless-new-zealand-transmission-system/ (accessed on 12 April 2022).
- Delbert, C. The Dawn of Wireless Electricity Is Finally Upon Us. Here’s How New Zealand Will Do It. 2021. Available online: https://www.popularmechanics.com/science/a33522699/wireless-electricity-new-zealand/ (accessed on 12 April 2022).
- Boyle, A. PowerLight Is Hitting Its Targets with a Power Beaming System That Uses Lasers. 2021. Available online: https://www.geekwire.com/2021/powerlight-hitting-targets-power-beaming-system-uses-laser-light/ (accessed on 12 April 2022).
- Wireless Power Transmission: Patent Landscape Analysis. Available online: https://www.wipo.int/edocs/plrdocs/en/lexinnova_plr_wireless_power.pdf (accessed on 7 May 2022).
- Banga, B. Global Autonomous Drone Wireless Charging and Infrastructure Market to Reach $249.3 Million by 2024. 2020. Available online: https://www.bloomberg.com/press-releases/2020-01-07/global-autonomous-drone-wireless-charging-and-infrastructure-market-to-reach-249-3-million-by-2024 (accessed on 7 May 2022).
- Huang, J.; Zhou, Y.; Ning, Z.; Gharavi, H. Wireless Power Transfer and Energy Harvesting: Current Status and Future Prospects. IEEE Wirel. Commun. 2019, 26, 163–169. [Google Scholar] [CrossRef] [PubMed]
- Ansari, N.; Wu, D.; Sun, X. FSO as backhaul and energizer for drone-assisted mobile access networks. ICT Express 2020, 6, 139–144. [Google Scholar] [CrossRef]
- Hua, M.; Li, C.; Huang, Y.; Yang, L. Throughput maximization for UAV-enabled wireless power transfer in relaying system. In Proceedings of the 2017 9th International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 11–13 October 2017; pp. 1–5. [Google Scholar]
- Hoseini, S.A.; Hassan, J.; Bokani, A.; Kanhere, S.S. Trajectory optimization of flying energy sources using q-learning to recharge hotspot uavs. In Proceedings of the IEEE Infocom 2020-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 683–688. [Google Scholar]
- Nugent, T.J., Jr.; Kare, J.T. Laser power beaming for defense and security applications. Unmanned Syst. Technol. XIII 2011, 8045, 384–391. [Google Scholar]
- Ouyang, J.; Che, Y.; Xu, J.; Wu, K. Throughput maximization for laser-powered UAV wireless communication systems. In Proceedings of the 2018 IEEE International Conference on Communications Workshops (ICC Workshops), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Zhang, Q.; Fang, W.; Liu, Q.; Wu, J.; Xia, P.; Yang, L. Distributed laser charging: A wireless power transfer approach. IEEE Internet Things J. 2018, 5, 3853–3864. [Google Scholar] [CrossRef] [Green Version]
- Jawad, A.M.; Jawad, H.M.; Nordin, R.; Gharghan, S.K.; Abdullah, N.F.; Abu-Alshaeer, M.J. Wireless Power Transfer with Magnetic Resonator Coupling and Sleep/Active Strategy for a Drone Charging Station in Smart Agriculture. IEEE Access 2019, 7, 139839–139851. [Google Scholar] [CrossRef]
- Valente, J.; Sanz, D.; Barrientos, A.; Del Cerro, J.; Ribeiro, Á.; Rossi, C. An Air-Ground Wireless Sensor Network for Crop Monitoring. Sensors 2011, 11, 6088–6108. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.A.; Qureshi, I.M.; Khanzada, F. A Hybrid Communication Scheme for Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET). Drones 2019, 3, 16. [Google Scholar] [CrossRef] [Green Version]
- Campi, T.; Cruciani, S.; Feliziani, M. Wireless Power Transfer Technology Applied to an Autonomous Electric UAV with a Small Secondary Coil. Energies 2018, 11, 352. [Google Scholar] [CrossRef] [Green Version]
- Khofiyah, N.A.; Maret, S.; Sutopo, W.; Nugroho, B.D.A. Goldsmith’s Commercialization Model for Feasibility Study of Technology Lithium Battery Pack Drone. In Proceedings of the 2018 5th International Conference on Electric Vehicular Technology (ICEVT), Surakarta, Indonesia, 30–31 October 2018; pp. 147–151. [Google Scholar]
- Verstraete, D.; Lehmkuehler, K. Wong Design of a fuel cell powered blended wing body UAV. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Houston, Texas, USA, 9–15 November 2012; American Society of Mechanical Engineers: New York, NY, USA, 2013; Volume 45172, pp. 621–629. [Google Scholar]
- Donateo, T.; Ficarella, A.; Spedicato, L.; Arista, A.; Ferraro, M. A new approach to calculating endurance in electric flight and comparing fuel cells and batteries. Appl. Energy 2017, 187, 807–819. [Google Scholar] [CrossRef]
- Traub, L.W. Range and Endurance Estimates for Battery-Powered Aircraft. J. Aircr. 2011, 48, 703–707. [Google Scholar] [CrossRef]
- Mike, R. Whitepaper: Fuel Cell-Based Energy Systems for Commercial UAVs; Unmanned Systems Technology: Aliso Viejo, CA, USA, 2018. [Google Scholar]
- Hassanalian, M.; Radmanesh, M.; Sedaghat, A. Increasing Flight Endurance of MAVs using Multiple Quantum Well Solar Cells. Int. J. Aeronaut. Space Sci. 2014, 15, 212–217. [Google Scholar] [CrossRef] [Green Version]
- Lee, D.; Zhou, J.; Lin, W.T. Autonomous battery swapping system for quadcopter. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 118–124. [Google Scholar]
- Bocewicz, G.; Nielsen, P.; Banaszak, Z.; Thibbotuwawa, A. Deployment of Battery Swapping Stations for Unmanned Aerial Vehicles Subject to Cyclic Production Flow Constraints. In International Conference on Information and Software Technologies; Springer: Cham, Switzerland, 2018; pp. 73–87. [Google Scholar] [CrossRef]
- Kemper, F.P.; Suzuki, K.A.; Morrison, J.R. UAV consumable replenishment: Design concepts for automated ser-vice stations. J. Intell. Robot. Syst. 2011, 61, 369–397. [Google Scholar] [CrossRef]
- Suzuki, K.A.O.; Filho, P.K.; Morrison, J.R. Automatic Battery Replacement System for UAVs: Analysis and Design. J. Intell. Robot. Syst. 2011, 65, 563–586. [Google Scholar] [CrossRef]
- Michini, B.; Toksoz, T.; Redding, J.; Michini, M.; How, J.; Vavrina, M.; Vian, J. Automated battery swap and re-charge to enable persistent UAV missions. Infotech@ Aerosp. 2011, 2011, 1405. [Google Scholar]
- Swieringa, K.A.; Hanson, C.B.; Richardson, J.R.; White, J.D.; Hasan, Z.; Qian, E.; Girard, A. Autonomous battery swapping system for small-scale helicopters. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 3335–3340. [Google Scholar]
- Zhang, X.; Duan, L. Optimal Patrolling Trajectory Design for Multi-UAV Wireless Servicing and Battery Swapping. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Galkin, B.; Kibilda, J.; DaSilva, L.A. UAVs as Mobile Infrastructure: Addressing Battery Lifetime. IEEE Commun. Mag. 2019, 57, 132–137. [Google Scholar] [CrossRef] [Green Version]
- Richardson, P.L. Upwind dynamic soaring of albatrosses and UAVs. Prog. Oceanogr. 2015, 130, 146–156. [Google Scholar] [CrossRef]
- Lu, M.; James, A.; Bagheri, M. Unmanned aerial vehicle (UAV) charging from powerlines. In Proceedings of the 2017 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Bangalore, India, 8–10 November 2017; pp. 1–6. [Google Scholar]
- Powerlight Technologies—Power Over Fiber Case Study—Aerial Applications. Available online: https://powerlighttech.com/power-over-fiber-case-study-aerial-applications (accessed on 27 May 2022).
- Muttin, F. Umbilical deployment modeling for tethered UAV detecting oil pollution from ship. Appl. Ocean Res. 2011, 33, 332–343. [Google Scholar] [CrossRef]
- Gu, B.W.; Choi, S.Y.; Choi, Y.S.; Cai, G.; Seneviratne, L.; Rim, C.T. Novel Roaming and Stationary Tethered Aerial Robots for Continuous Mobile Missions in Nuclear Power Plants. Nucl. Eng. Technol. 2016, 48, 982–996. [Google Scholar] [CrossRef] [Green Version]
- Xiao, X.; Fan, Y.; Dufek, J.; Murphy, R. Indoor uav localization using a tether. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–6. [Google Scholar]
- Kishk, M.A.; Bader, A.; Alouini, M.-S. On the 3-D Placement of Airborne Base Stations Using Tethered UAVs. IEEE Trans. Commun. 2020, 68, 5202–5215. [Google Scholar] [CrossRef]
- ENG ‘kites’: Tethered Drones for Newsgathering. Available online: https://www.rtdna.org/article/eng_kites_tethered_drones_for_newsgathering (accessed on 29 May 2022).
- Anit-Terror Drill Monitoring with Orion Tethered UAV. Available online: https://elistair.com/anti-terror-drill-monitoring-with-orion-tethered-uav/ (accessed on 27 May 2022).
- Moore, J.; Tedrake, R. Magnetic localization for perching UAVs on powerlines. In Proceedings of the 2011 IEEE/RSJ In-ternational Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 2700–2707. [Google Scholar]
- Moore, J.; Tedrake, R. Powerline perching with a fixed-wing UAV. In Proceedings of the AIAA Infotech@ Aerospace Conference and AIAA Unmanned… Unlimited Conference, Seattle, WA, USA, 6–9 April 2009; p. 1959. [Google Scholar]
- Gong, A.; MacNeill, R.; Verstraete, D.; Palmer, J.L. Analysis of a fuel-cell/battery/supercapacitor hybrid pro-pulsion system for a UAV using a hardware-in-the-loop flight simulator. In Proceedings of the 2018 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Cincinnati, OH, USA, 12–14 July 2018; pp. 1–17. [Google Scholar]
- Kim, T.; Kwon, S. Design and development of a fuel cell-powered small unmanned aircraft. Int. J. Hydrogen Energy 2012, 37, 615–622. [Google Scholar] [CrossRef]
- Sharaf, O.Z.; Orhan, M.F. An overview of fuel cell technology: Fundamentals and applications. Renew. Sustain. Energy Rev. 2014, 32, 810–853. [Google Scholar] [CrossRef]
- Swider-Lyons, K.; Stroman, R.; Page, G.; Schuette, M.; Mackrell, J.; Rodgers, J. Hydrogen fule cell propulsion for long endurance small UVAs. In Proceedings of the AIAA Centennial of Naval Aviation Forum “100 Years of Achievement and Progress”, Virginia Beach, VA, USA, 21–22 September 2011; p. 6975. [Google Scholar]
- Lee, B.; Kwon, S.; Park, P.; Kim, K. Active power management system for an unmanned aerial vehicle powered by solar cells, a fuel cell, and batteries. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 3167–3177. [Google Scholar] [CrossRef]
- Williams, M.C.; Suzuki, A.; Miyamoto, A. Assessment of the Performance of Fuel Cells and Batteries. ECS Trans. 2013, 51, 183–192. [Google Scholar] [CrossRef]
- Hydrogen Powered UAV. Available online: https://www.rotordronepro.com/hydrogen-powered-uav/ (accessed on 27 May 2022).
- Cai, Q.; Brett, D.; Browning, D.; Brandon, N. A sizing-design methodology for hybrid fuel cell power systems and its application to an unmanned underwater vehicle. J. Power Sources 2010, 195, 6559–6569. [Google Scholar] [CrossRef]
- Belmonte, N.; Staulo, S.; Fiorot, S.; Luetto, C.; Rizzi, P.; Baricco, M. Fuel cell powered octocopter for inspection of mobile cranes: Design, cost analysis and environmental impacts. Appl. Energy 2018, 215, 556–565. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, J.; An, Y.; Wu, L.; Dou, H.; Zhang, J.; Zhang, Y.; Wu, S.; Dong, M.; Zhang, X.; et al. Sodium-ion capacitors: Materials, Mechanism, and Challenges. ChemSusChem 2020, 13, 2522–2539. [Google Scholar] [CrossRef]
- Aneke, M.; Wang, M. Energy storage technologies and real life applications—A state of the art review. Appl. Energy 2016, 179, 350–377. [Google Scholar] [CrossRef] [Green Version]
- Gong, A.; Verstraete, D. Role of battery in a hybrid electrical fuel cell UAV propulsion system. In Proceedings of the 52nd AIAA Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014. [Google Scholar]
- Lee, B.; Park, P.; Kim, C. Power Managements of a Hybrid Electric Propulsion System Powered by Solar Cells, Fuel Cells, and Batteries for UAVs. In Handbook of Unmanned Aerial Vehicles; George, J.V., Kimon, P.V., Eds.; Springer: Dordrecht, The Netherlands, 2014; pp. 495–524. [Google Scholar] [CrossRef]
- Jansen, R.; Bowman, C.; Jankovsky, A.; Dyson, R.; Felder, J. Overview of NASA Electrified Aircraft Propulsion (EAP) Research for Large Subsonic Transports. In Proceedings of the 53rd AIAA/SAE/ASEE Joint Propulsion Conference, Atlanta, GA, USA, 10–12 July 2017. [Google Scholar] [CrossRef]
- Hung, J.; Gonzalez, L. On parallel hybrid-electric propulsion system for unmanned aerial vehicles. Prog. Aerosp. Sci. 2012, 51, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Wang, Q.; Hu, B. A review of developments in energy storage systems for hybrid excavators. Autom. Constr. 2017, 80, 1–10. [Google Scholar] [CrossRef]
- Fazelpour, F.; Vafaeipour, M.; Rahbari, O.; Shirmohammadi, R. Considerable parameters of using PV cells for solar-powered aircrafts. Renew. Sustain. Energy Rev. 2013, 22, 81–91. [Google Scholar] [CrossRef]
- Thipyopas, C.; Sripawadkul, V.; Warin, N. Design and Development of a Small Solar-Powered UAV for Environmental Monitoring Application. In Proceedings of the 2019 IEEE Eurasia Conference on IOT, Communication and Engineering (ECICE), Yunlin, Taiwan, 3–6 October 2019; pp. 316–319. [Google Scholar] [CrossRef]
- Hempe, D. Unmanned Aircraft Systems in the United States. In Proceedings of the US/Europe International Safety Conference, June 2006; Available online: http://slideplayer.com/slide/8117203/ (accessed on 22 April 2022).
- Wu, J.; Wang, H.; Huang, Y.; Su, Z.; Zhang, M. Energy Management Strategy for Solar-Powered UAV Long-Endurance Target Tracking. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 1878–1891. [Google Scholar] [CrossRef]
- Gao, X.Z.; Hou, Z.X.; Guo, Z.; Chen, X.Q. Reviews of methods to extract and store energy for solar-powered air-craft. Renew. Sustain. Energy Rev. 2015, 44, 96–108. [Google Scholar] [CrossRef]
- Helios Prototype Flying Wing. Available online: https://www.nasa.gov/centers/dryden/multimedia/imagegallery/Helios/ED01-0209-2.html (accessed on 29 May 2022).
- Facebook Reveals Its Plan for Solar-Powered UAVs. Available online: https://www.ainonline.com/aviation-news/2014-03-28/facebook-reveals-its-plan-solar-powered-uavs (accessed on 29 May 2022).
- Prototype Solar-Powered, High-Altitude UAV Undergoing Flight Tests. Available online: https://www.electronicdesign.com/technologies/alternative-energy/article/21199573/prototype-solarpowered-highaltitude-uav-undergoing-flight-tests (accessed on 29 May 2022).
- Xu, J.; Zeng, Y.; Zhang, R. UAV-Enabled Wireless Power Transfer: Trajectory Design and Energy Optimization. IEEE Trans. Wirel. Commun. 2018, 17, 5092–5106. [Google Scholar] [CrossRef] [Green Version]
- Hu, Y.; Yuan, X.; Xu, J.; Schmeink, A. Optimal 1D Trajectory Design for UAV-Enabled Multiuser Wireless Power Transfer. IEEE Trans. Commun. 2019, 67, 5674–5688. [Google Scholar] [CrossRef] [Green Version]
- Campi, T.; Dionisi, F.; Cruciani, S.; De Santis, V.; Feliziani, M.; Maradei, F. Magnetic field levels in drones equipped with wireless power transfer technology. In Proceedings of the 2016 Asia-Pacific International Symposium on Electromagnetic Com-patibility (APEMC), Shenzhen, China, 17–21 May 2016; Volume 1, pp. 544–547. [Google Scholar]
- Bin Junaid, A.; Konoiko, A.; Zweiri, Y.; Sahinkaya, M.N.; Seneviratne, L. Autonomous Wireless Self-Charging for Multi-Rotor Unmanned Aerial Vehicles. Energies 2017, 10, 803. [Google Scholar] [CrossRef]
- Blain, L. In-Flight Charging Gives Drones Unlimited Autonomous Range. Available online: https://newatlas.com/in-airdrone-charging-unlimited-range/56363 (accessed on 29 May 2022).
- Rosa, R.V.; Rothenberg, C.E. Blockchain-Based Decentralized Applications for Multiple Administrative Domain Networking. IEEE Commun. Stand. Mag. 2018, 2, 29–37. [Google Scholar] [CrossRef]
- Alladi, T.; Chamola, V.; Sikdar, B.; Choo, K.K.R. Consumer IoT: Security vulnerability case studies and solutions. IEEE Consum. Electron. Mag. 2020, 9, 17–25. [Google Scholar] [CrossRef]
- Achtelik, M.C.; Stumpf, J.; Gurdan, D.; Doth, K.-M. Design of a flexible high performance quadcopter platform breaking the MAV endurance record with laser power beaming. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 5166–5172. [Google Scholar]
- Chen, Q.; Zhang, D.; Zhu, D.; Shi, Q.; Gu, J.; Ai, Y. Design and Experiment for Realization of Laser Wireless Power Transmission for Small Unmanned Aerial Vehicles. In AOPC 2015: Advances in Laser Technology and Applications; SPIE: Cergy-Pontoise, France, 2015; Volume 9671. [Google Scholar] [CrossRef]
- Lee, S.; Lim, N.; Choi, W.; Lee, Y.; Baek, J.; Park, J. Study on battery charging converter for MPPT control of laser wireless power transmission system. Electronics 2020, 9, 1745. [Google Scholar] [CrossRef]
- Kim, Y.; Shin, H.B.; Lee, W.H.; Jung, S.H.; Kim, C.Z.; Kim, H.; Lee, Y.T.; Kang, H.K. 1080 nm InGaAs laser power converters grown by MOCVD using InAlGaAs metamorphic buffer layers. Sol. Energy Mater. Sol. Cells 2019, 200, 109984. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Nguyen, C.V.; Truong, L.H.; Le, A.M.; Quyen, T.V.; Masaracchia, A.; Teague, K.A. Electromagnetic field based wpt technologies for uavs: A comprehensive survey. Electronics 2020, 9, 461. [Google Scholar] [CrossRef] [Green Version]
- Mason, R. Feasibility of Laser Power Transmission to a High-Altitude Unmanned Aerial Vehicle; Rand Project Air Force: Santa Monica, CA, USA, 2011. [Google Scholar]
- Höhn, O.; Walker, A.W.; Bett, A.W.; Helmers, H. Optimal laser wavelength for efficient laser power converter operation over temperature. Appl. Phys. Lett. 2016, 108, 241104. [Google Scholar] [CrossRef]
- Matsuura, M.; Nomoto, H.; Mamiya, H.; Higuchi, T.; Masson, D.; Fafard, S. Over 40-W Electric Power and Optical Data Transmission Using an Optical Fiber. IEEE Trans. Power Electron. 2020, 36, 4532–4539. [Google Scholar] [CrossRef]
- Putra, A.W.S.; Tanizawa, M.; Maruyama, T. Optical Wireless Power Transmission Using Si Photovoltaic Through Air, Water, and Skin. IEEE Photon. Technol. Lett. 2018, 31, 157–160. [Google Scholar] [CrossRef]
- ANSI Z136.1-2014; Safe Use of Lasers. Laser Institute of America: Orlando, FL, USA, 2014.
- Duncan, K.J. Laser based power transmission: Component selection and laser hazard analysis. In Proceedings of the 2016 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Knoxville, TN, USA, 4–6 October 2016; pp. 100–103. [Google Scholar]
- Lu, X.; Niyato, D.; Wang, P.; Kim, D.I. Wireless charger networking for mobile devices: Fundamentals, standards, and applications. IEEE Wirel. Commun. 2015, 22, 126–135. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Wu, J.; Xia, P.; Zhao, S.; Chen, W.; Yang, Y.; Hanzo, L. Charging Unplugged: Will Distributed Laser Charging for Mobile Wireless Power Transfer Work? IEEE Veh. Technol. Mag. 2016, 11, 36–45. [Google Scholar] [CrossRef]
- Della-Pergola, R.; Alpert, O.; Nahmias, O.; Vaisleib, V. Spatially Distributed Laser Resonator. U.S. Patent No. 9,905,988, 2018. [Google Scholar]
- Jaafar, W.; Yanikomeroglu, H. Dynamics of Laser-Charged UAVs: A Battery Perspective. IEEE Internet Things J. 2020, 8, 10573–10582. [Google Scholar] [CrossRef]
- Jaafar, W.; Yanikomeroglu, H. Dynamics of quadrotor UAVs for aerial networks: An energy perspective. arXiv 2019, arXiv:1905.06703. [Google Scholar]
- Liu, X.; Liu, Y.; Chen, Y.; Hanzo, L. Trajectory Design and Power Control for Multi-UAV Assisted Wireless Networks: A Machine Learning Approach. IEEE Trans. Veh. Technol. 2019, 68, 7957–7969. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Chen, M.; Liu, Y.; Chen, Y.; Cui, S.; Hanzo, L. Artificial Intelligence Aided Next-Generation Networks Relying on UAVs. IEEE Wirel. Commun. 2020, 28, 120–127. [Google Scholar] [CrossRef]
- Huo, Y.; Dong, X.; Lu, T.; Xu, W.; Yuen, M. Distributed and multi-layer UAV network for the next-generation wire-less communication. arXiv 2018, arXiv:1805.01534. [Google Scholar]
- Mukhlif, F.; Bin Noordin, K.A.; Mansoor, A.M.; Kasirun, Z.M. Green transmission for C-RAN based on SWIPT in 5G: A review. Wirel. Netw. 2018, 25, 2621–2649. [Google Scholar] [CrossRef]
- Krikidis, I.; Timotheou, S.; Nikolaou, S.; Zheng, G.; Ng, D.W.K.; Schober, R. Simultaneous wireless information and power transfer in modern communication systems. IEEE Commun. Mag. 2014, 52, 104–110. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Huang, S.; Jiang, C.; Long, K.; Leung, V.C.M.; Poor, H.V. Energy Efficient User Association and Power Allocation in Millimeter-Wave-Based Ultra Dense Networks with Energy Harvesting Base Stations. IEEE J. Sel. Areas Commun. 2017, 35, 1936–1947. [Google Scholar] [CrossRef]
- Krikidis, I.; Sasaki, S.; Timotheou, S.; Ding, Z. A Low Complexity Antenna Switching for Joint Wireless Information and Energy Transfer in MIMO Relay Channels. IEEE Trans. Commun. 2014, 62, 1577–1587. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Mobile Unmanned Aerial Vehicles (UAVs) for Energy-Efficient Internet of Things Communications. IEEE Trans. Wirel. Commun. 2017, 16, 7574–7589. [Google Scholar] [CrossRef]
- Huang, F.; Chen, J.; Wang, H.; Ding, G.; Gong, Y.; Yang, Y. Multiple-UAV-Assisted SWIPT in Internet of Things: User Association and Power Allocation. IEEE Access 2019, 7, 124244–124255. [Google Scholar] [CrossRef]
- Du, Y.; Yang, K.; Wang, K.; Zhang, G.; Zhao, Y.; Chen, D. Joint Resources and Workflow Scheduling in UAV-Enabled Wirelessly-Powered MEC for IoT Systems. IEEE Trans. Veh. Technol. 2019, 68, 10187–10200. [Google Scholar] [CrossRef]
- Feng, W.; Tang, J.; Yu, Y.; Song, J.; Zhao, N.; Chen, G.; Wong, K.-K.; Chambers, J. UAV-Enabled SWIPT in IoT Networks for Emergency Communications. IEEE Wirel. Commun. 2020, 27, 140–147. [Google Scholar] [CrossRef]
- Sun, X.; Yang, W.; Cai, Y.; Ma, R.; Tao, L. Physical Layer Security in Millimeter Wave SWIPT UAV-Based Relay Networks. IEEE Access 2019, 7, 35851–35862. [Google Scholar] [CrossRef]
- Huang, F.; Chen, J.; Wang, H.; Ding, G.; Xue, Z.; Yang, Y.; Song, F. UAV-Assisted SWIPT in Internet of Things with Power Splitting: Trajectory Design and Power Allocation. IEEE Access 2019, 7, 68260–68270. [Google Scholar] [CrossRef]
- Yin, S.; Zhao, Y.; Li, L. UAV-assisted cooperative communications with time-sharing SWIPT. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Diamantoulakis, P.D.; Karagiannidis, G.K.; Ding, Z. Simultaneous Lightwave Information and Power Transfer (SLIPT). IEEE Trans. Green Commun. Netw. 2018, 2, 764–773. [Google Scholar] [CrossRef]
- de Oliveira Filho, J.I.; Trichili, A.; Ooi, B.S.; Alouini, M.S.; Salama, K.N. Toward self-powered Internet of Under-water Things devices. IEEE Commun. Mag. 2020, 58, 68–73. [Google Scholar] [CrossRef]
- Diamantoulakis, P.D.; Pappi, K.N.; Ma, Z.; Lei, X.; Sofotasios, P.C.; Karagiannidis, G.K. Airborne radio access networks with simultaneous lightwave information and power transfer (SLIPT). In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar]
- Fakidis, J.; Helmers, H.; Haas, H. Simultaneous Wireless Data and Power Transfer for a 1-Gb/s GaAs VCSEL and Photovoltaic Link. IEEE Photon. Technol. Lett. 2020, 32, 1277–1280. [Google Scholar] [CrossRef]
- Che, Y.L.; Long, W.; Luo, S.; Wu, K.; Zhang, R. Energy-Efficient UAV Multicasting with Simultaneous FSO Back-haul and Power Transfer. IEEE Wirel. Commun. Lett. 2021, 10, 1537–1541. [Google Scholar] [CrossRef]
- Abou-Rjeily, C.; Kaddoum, G.; Karagiannidis, G.K. Ground-to-air FSO communications: When high data rate communication meets efficient energy harvesting with simple designs. Opt. Express 2019, 27, 34079–34092. [Google Scholar] [CrossRef]
- Shin, M.; Kim, J.; Levorato, M. Auction-Based Charging Scheduling with Deep Learning Framework for Multi-Drone Networks. IEEE Trans. Veh. Technol. 2019, 68, 4235–4248. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Zhu, K.; Wang, R. RF aerially charging scheduling for UAV fleet: A Q-Learning approach. In Proceedings of the 2019 15th International Conference on Mobile Ad-Hoc and Sensor Networks (MSN), Shenzhen, China, 11–13 December 2019; pp. 194–199. [Google Scholar]
- Li, M.; Liu, L.; Gu, Y.; Ding, Y.; Wang, L. Minimizing energy consumption in wireless rechargeable UAV networks. IEEE Internet Things J. 2021, 9, 3522–3532. [Google Scholar] [CrossRef]
- Sekander, S.; Tabassum, H.; Hossain, E. Statistical performance modeling of solar and wind-powered UAV communications. IEEE Trans. Mob. Comput. 2020, 20, 2686–2700. [Google Scholar] [CrossRef]
- Zhao, M.M.; Shi, Q.; Zhao, M.J. Efficiency maximization for UAV-enabled mobile relaying systems with laser charging. IEEE Trans. Wirel. Commun. 2020, 19, 3257–3272. [Google Scholar] [CrossRef] [Green Version]
- Ure, N.K.; Chowdhary, G.; Toksoz, T.; How, J.; Vavrina, M.A.; Vian, J. An Automated Battery Management System to Enable Persistent Missions with Multiple Aerial Vehicles. IEEE/ASME Trans. Mechatron. 2014, 20, 275–286. [Google Scholar] [CrossRef]
- Yin, S.; Li, L.; Yu, F.R. Resource Allocation and Basestation Placement in Downlink Cellular Networks Assisted by Multiple Wireless Powered UAVs. IEEE Trans. Veh. Technol. 2019, 69, 2171–2184. [Google Scholar] [CrossRef]
- Lahmeri, M.A.; Kishk, M.A.; Alouini, M.S. Charging Techniques for UAV-Assisted Data Collection: Is Laser Power Beaming the Answer? IEEE Commun. Mag. 2022, 60, 50–56. [Google Scholar] [CrossRef]
- Tlili, F.; Fourati, L.C.; Ayed, S.; Ouni, B. Investigation on vulnerabilities, threats and attacks prohibiting UAVs charging and depleting UAVs batteries: Assessments & countermeasures. Ad Hoc Netw. 2022, 129, 102805. [Google Scholar] [CrossRef]
- Wang, Y.; Su, Z.; Zhang, N.; Li, R. Mobile Wireless Rechargeable UAV Networks: Challenges and Solutions. IEEE Commun. Mag. 2022, 60, 33–39. [Google Scholar] [CrossRef]
- Fu, S.; Tang, Y.; Wu, Y.; Zhang, N.; Gu, H.; Chen, C.; Liu, M. Energy-Efficient UAV-Enabled Data Collection via Wireless Charging: A Reinforcement Learning Approach. IEEE Internet Things J. 2021, 8, 10209–10219. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EMF Based Charging | Charging Type | Non-EMF Based Charging | Charging Type |
|---|---|---|---|
| Capacitive charging | Static charging up to a few mm | Gust soaring | In-flight charging |
| Inductive charging | Static charging up to a few cm | PV integrated | In-flight charging |
| Magnetic resonance charging | Static charging up to a few cm | Laser beaming | In-flight charging |
| Battery dumping | In-flight charging |
| Characteristics | Li-S | LiPo | Ni-Mh | Ni-Cd |
|---|---|---|---|---|
| Specific power (W/kg) | 600 | 2800 | 900 | 300 |
| Energy density (Wh/L) | 350 | 300 | 300 | 100 |
| Specific energy (Wh/kg) | 350 | 180 | 80 | 40 |
| Type | Energy Density (Wh/kg) | Power Density (W/kg) | Cycle Life (Times) | Efficiency of Charging and Discharging (%) | Advantages | Drawbacks |
|---|---|---|---|---|---|---|
| Lead-acid battery | 30–40 | 200–300 | 300–400 | 75 | High recycle rate, low cost | Poor performance at low temperature |
| Ni-Mh battery | 60–80 | 800–1500 | >1000 | 75 | Long lifespan, high energy density | High manufacturing cost, high self-discharging rate |
| Li-ion battery | 100–120 | 600–2000 | >1000 | 90 | Long cycle life, lightweight, high energy density, high voltage | Security risk, non-overcharge, life reduce at high temperature |
| Super capacitor | 4–15 | 1000–10,000 | >10,000 | 85–98 | Fast charging and discharging speed, pollution-free and extremely long life | Low energy density |
| WPT Technique | Advantage | Disadvantage | Charging Distance | Application |
|---|---|---|---|---|
| Microwave radiation | Longer charging range | Low charging efficiency, health and safety issues in high exposure | Up to several kilometers | LEDs, implanted body devices, sensors, RFID cards |
| Magnetic resonance coupling | Non-line-of-sight (NLOS) charging, high charging efficiency, charging multiple devices | Complex implementation, limited charging distance, | Up to a few meters | Electrical vehicle charging, home appliances, mobile electronics |
| Inductive coupling | Simple implementation, safe | Alignment issues, heating effect, short charging range | Up to a few centimeters | Contactless smartcards, RFID tags, mobile electronics |
| Distributed laser charging (DLC) | Suitable for mobile applications, SWIPT and LBS ready, visibility agnostic, EMI free, safe, self-alignment | Low charging efficiency, LOS required | Up to several meters | LEDs, sensors, consumer electronics, mobile devices |
| Reference | Name | Type | Energy Efficiency | Human Intervention | Advantages | Drawbacks |
|---|---|---|---|---|---|---|
| [121] | UGV-assisted WPT | Wireless | Medium | No | On-demand self-recharging No human intervention | Complex route/resource/landing scheduling |
| [122] | UAV-assisted WPT | Wireless | Medium | No | On-demand self-recharging No need to land | Hard to operate autonomously Prone to aerial collision |
| [123] | Stationary WPT | Wireless | Medium | No | High charging feasibility No human intervention | Need additional flight |
| [124] | RE-based charging | Harvesting energy from environment | Medium | No | No need to land No additional flight | Weather-dependent Limited harvested energy Need additional weight and size |
| [125] | Laser PB charging | Wireless | Low | Medium | No need to land No additional flight | High deployment cost Need complete UAV motion information |
| [126] | Battery hot swapping | Swap | Very high | Medium | Support multi-UAV charging | High round-trip energy cost Issues in autonomous swapping |
| [127] | CS-based charging | Wired/wireless | High | Medium | Support multi-UAV charging | High round-trip energy cost Low charging feasibility |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohsan, S.A.H.; Othman, N.Q.H.; Khan, M.A.; Amjad, H.; Żywiołek, J. A Comprehensive Review of Micro UAV Charging Techniques. Micromachines 2022, 13, 977. https://doi.org/10.3390/mi13060977
Mohsan SAH, Othman NQH, Khan MA, Amjad H, Żywiołek J. A Comprehensive Review of Micro UAV Charging Techniques. Micromachines. 2022; 13(6):977. https://doi.org/10.3390/mi13060977
Chicago/Turabian StyleMohsan, Syed Agha Hassnain, Nawaf Qasem Hamood Othman, Muhammad Asghar Khan, Hussain Amjad, and Justyna Żywiołek. 2022. "A Comprehensive Review of Micro UAV Charging Techniques" Micromachines 13, no. 6: 977. https://doi.org/10.3390/mi13060977
APA StyleMohsan, S. A. H., Othman, N. Q. H., Khan, M. A., Amjad, H., & Żywiołek, J. (2022). A Comprehensive Review of Micro UAV Charging Techniques. Micromachines, 13(6), 977. https://doi.org/10.3390/mi13060977