
Design of a Morphing Skin with Shape Memory Alloy Based on Equivalent Thermal Stress Approach


Abstract
:1. Introduction
2. The Extended Boyd–Lagoudas Model
2.1. Mathematical Model
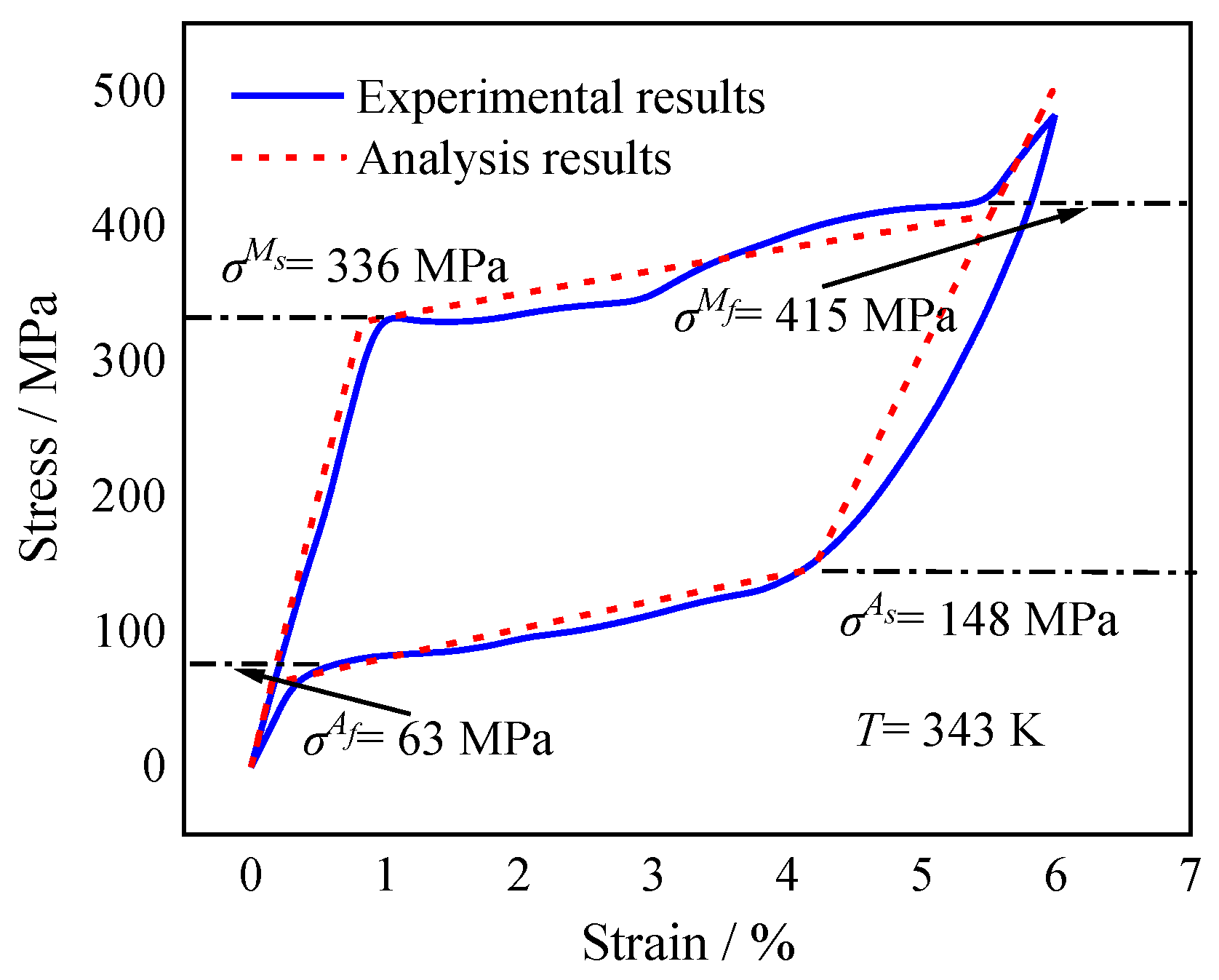
2.2. UMAT Validation
3. Equivalent Thermal Strain Approach
3.1. Validation Case 1
3.1.1. Results of the Extended Boyd–Lagoudas Model
3.1.2. Results of the Equivalent Thermal Strain Approach
3.2. Validation Case 2
3.2.1. Results of the Extended Boyd–Lagoudas Model
3.2.2. Results of the Equivalent Thermal Strain Approach
4. Design of Active Morphing Skin
4.1. Simulation of SMA Plate Flattening
4.2. Modeling of SMA Plate Driving
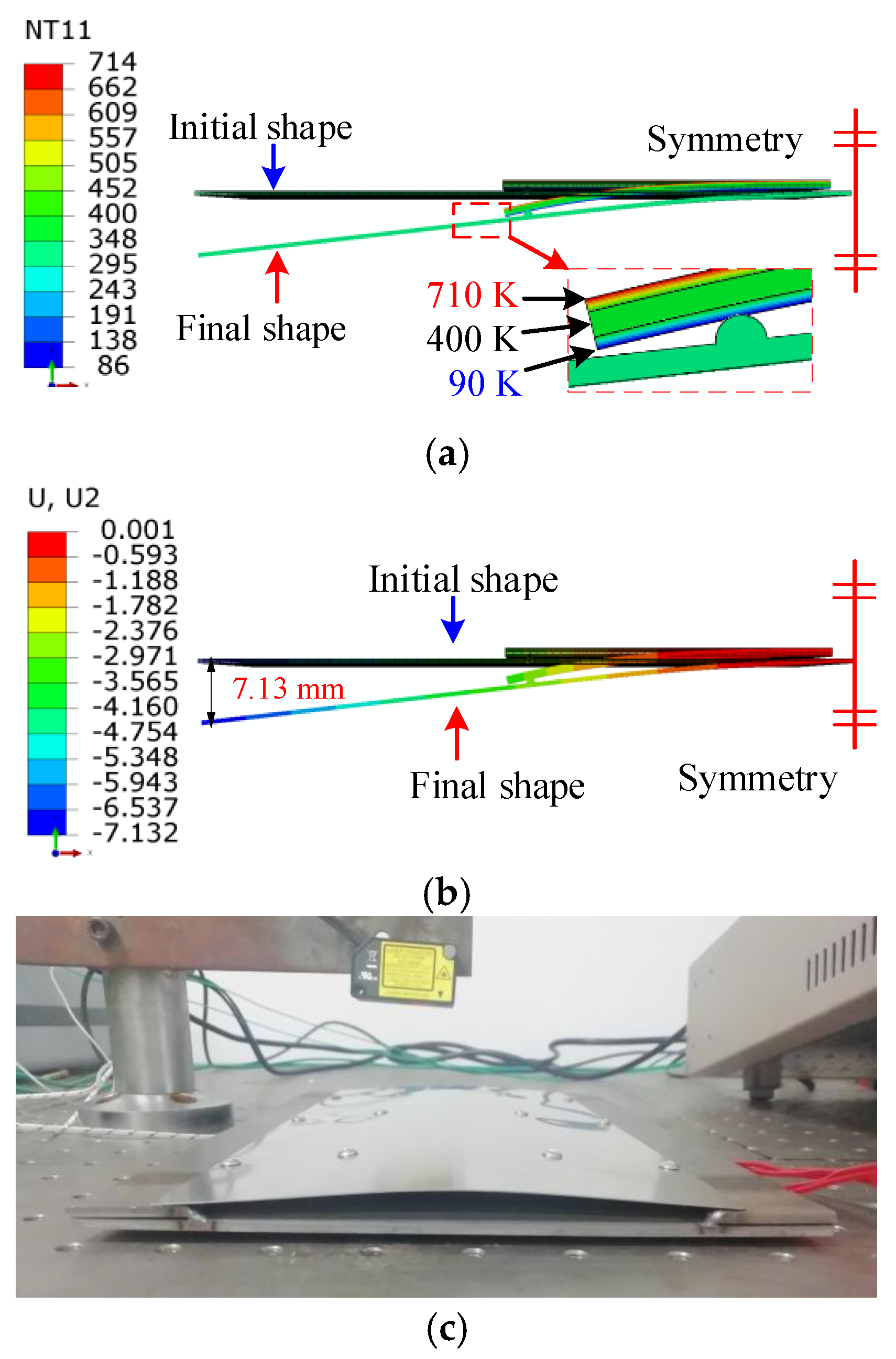
4.2.1. Transformation into Austenite by Heating
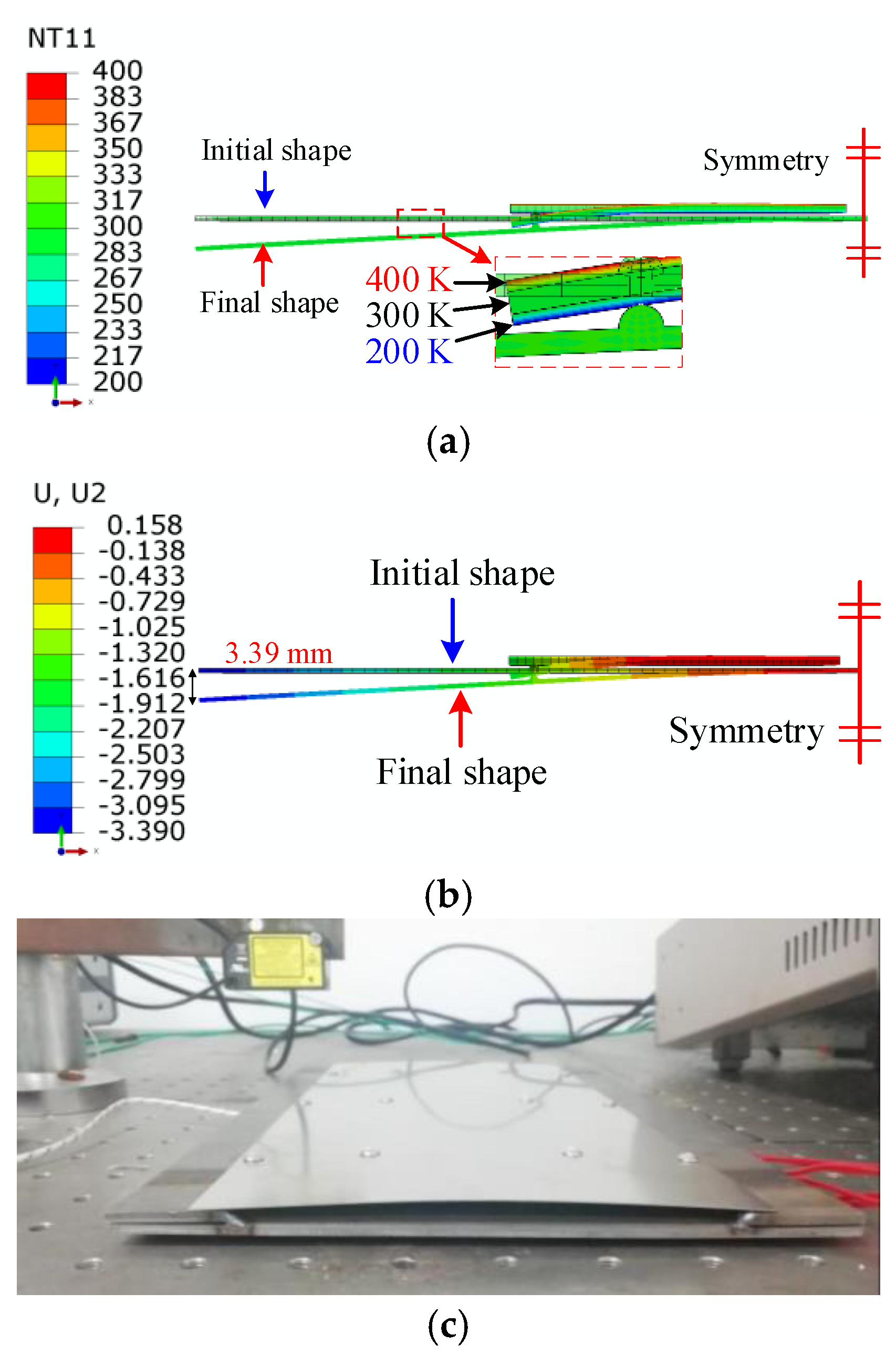
4.2.2. Transformation into Martensite by Cooling
5. Conclusions
- (1)
- The complicated transformation process among three SMA phases, twinned martensite, detwinned martensite, and austenite, was fully considered on the basis of the extended Boyd–Lagoudas model. A UMAT implementing the actual interaction was achieved, and a three-dimensional numerical simulation was realized in ABAQUS, showing consistent results with the experiment.
- (2)
- An equivalent thermal strain approach was adopted to simplify the SMA simulation procedure and reduce consumption. The approach was validated by the extended Boyd–Lagoudas model in two cases with a maximum relative error of 4.4%, and the time cost was reduced by 89.1%. The alternate use of UMAT and the simplified approach helped to reduce the challenge in subsequently modeling the wing using FEA.
- (3)
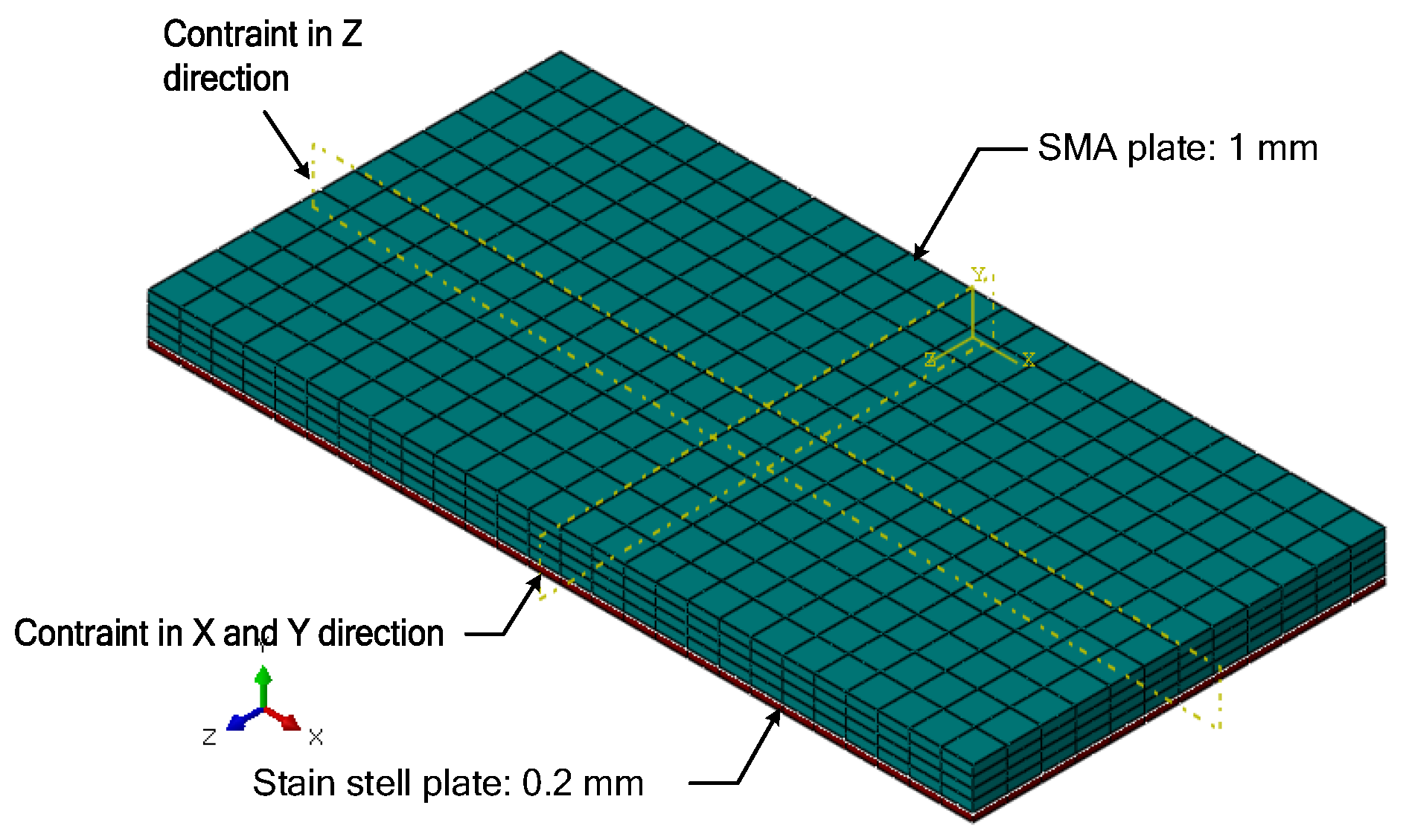
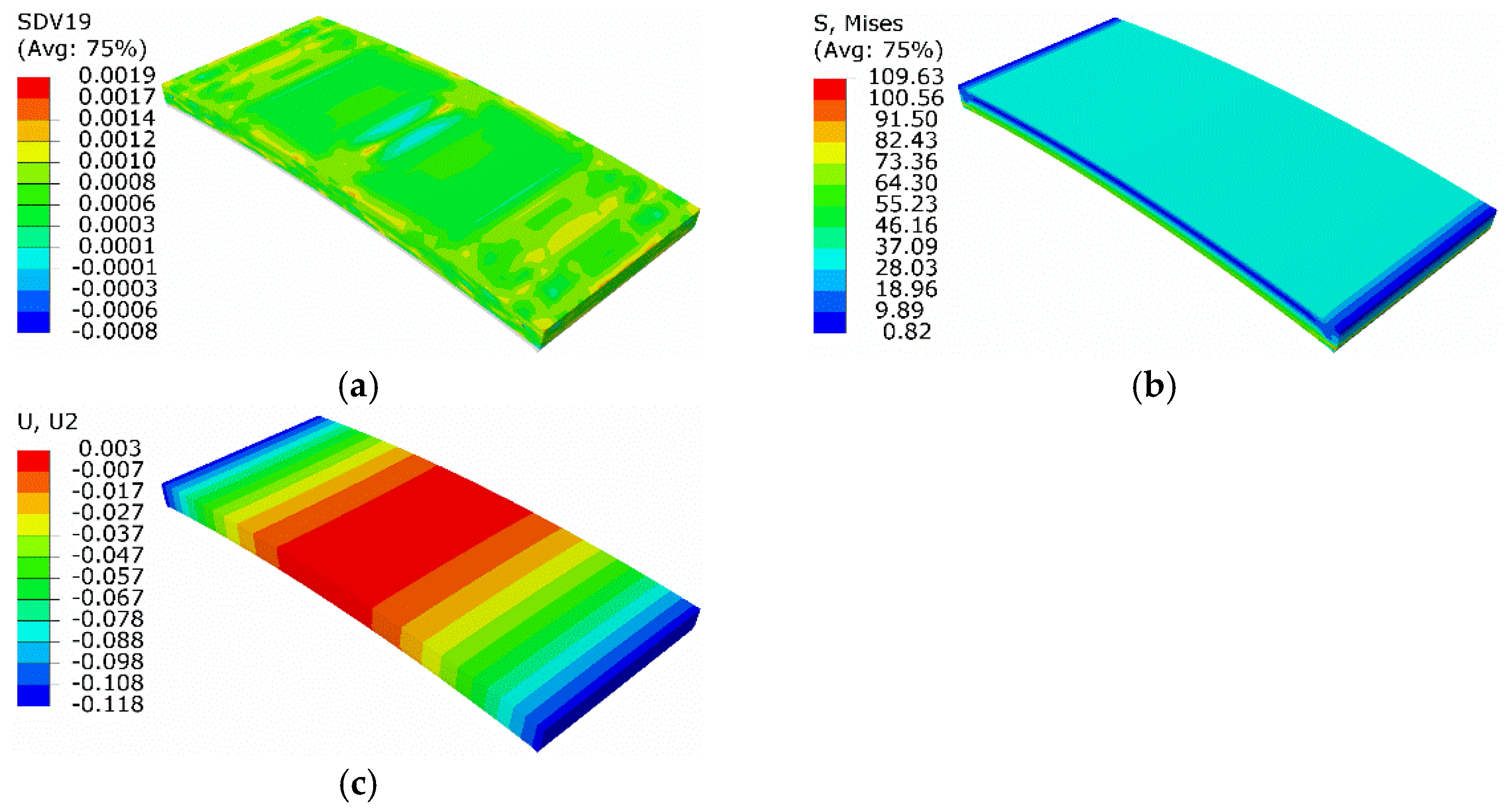
- An active two-way morphing skin driven by SMA and stainless steel was designed. The simulated arc height variation was 3.74 mm with a relative error of 1.84%, compared to the experimental result of 3.81 mm.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ajaj, R.M.; Beaverstock, C.S.; Friswell, M.I. Morphing Aircraft: The Need for a New Design Philosophy. Aerosp. Sci. Technol. 2016, 49, 154–166. [Google Scholar]
- Niu, W.; Zhang, Y.; Chen, H.; Zhang, M. Numerical Study of a Supercritical Airfoil/Wing with Variable-Camber Technology. Chin. J. Aeronaut. 2020, 33, 1850–1866. [Google Scholar] [CrossRef]
- Sun, J.; Guan, Q.; Liu, Y.; Leng, J. Morphing Aircraft Based on Smart Materials and Structures: A State-of-the-Art Review. J. Intell. Mater. Syst. Struct. 2016, 27, 2289–2312. [Google Scholar]
- Kikuta, M.T. Mechanical Properties of Candidate Materials for Morphing Wings. Master’s Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2003. [Google Scholar]
- Kudva, J.N. Overview of the DARPA Smart Wing Project. J. Intell. Mater. Syst. Struct. 2004, 15, 261–267. [Google Scholar] [CrossRef]
- Thill, C.L.; Etches, J.; Bond, I. Morphing skins. Aeronaut. J. 2008, 112, 117–139. [Google Scholar] [CrossRef]
- Gong, X.; Liu, L.; Scarpa, F.; Leng, J.; Liu, Y. Variable Stiffness Corrugated Composite Structure with Shape Memory Polymer for Morphing Skin Applications. Smart Mater. Struct. 2017, 26, 035052. [Google Scholar] [CrossRef] [Green Version]
- Quadrini, F.; Iorio, L.; Bellisario, D.; Santo, L. Shape Memory Polymer Composite Unit with Embedded Heater. Smart Mater. Struct. 2021, 30, 075009. [Google Scholar] [CrossRef]
- Takahashi, H.; Yokozeki, T.; Hirano, Y. Development of Variable Camber Wing with Morphing Leading and Trailing Sections Using Corrugated Structures. J. Intell. Mater. Syst. Struct. 2016, 27, 2827–2836. [Google Scholar] [CrossRef]
- Airoldi, A.; Fournier, S.; Borlandelli, E.; Bettini, P.; Sala, G. Design and Manufacturing of Skins Based on Composite Corrugated Laminates for Morphing Aerodynamic Surfaces. Smart Mater. Struct. 2017, 26, 045024. [Google Scholar] [CrossRef]
- Dayyani, I.; Friswell, M.I. Multi-Objective Optimization for the Geometry of Trapezoidal Corrugated Morphing Skins. Struct. Multidiscip. Optim. 2017, 55, 331–345. [Google Scholar] [CrossRef] [Green Version]
- Filipovic, D.; Kress, G. Manufacturing Method for High-Amplitude Corrugated Thin-Walled Laminates. Compos. Struct. 2019, 222, 110925. [Google Scholar] [CrossRef]
- Vora, J.; Khanna, S.; Chaudhari, R.; Patel, V.K.; Paneliya, S.; Pimenov, D.Y.; Giasin, K.; Prakash, C. Machining Parameter Optimization and Experimental Investigations of Nano-Graphene Mixed Electrical Discharge Machining of Nitinol Shape Memory Alloy. J. Mater. Res. Technol. 2022, 19, 653–668. [Google Scholar] [CrossRef]
- Sellitto, A.; Riccio, A. Overview and Future Advanced Engineering Applications for Morphing Surfaces by Shape Memory Alloy Materials. Materials 2019, 12, 708. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Singh Rajput, G.; Vora, J.; Prajapati, P.; Chaudhari, R. Areas of Recent Developments for Shape Memory Alloy: A Review. Mater. Today Proc. 2022, in press. [Google Scholar] [CrossRef]
- Okabe, Y.; Sugiyama, H. Shape-Variable Sandwich Structure with SMA Honeycomb Core and CFRP Skins. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 8–12 March 2009; p. 728817. [Google Scholar]
- Georges, T.; Brailovski, V.; Morellon, E.; Coutu, D.; Terriault, P. Design of Shape Memory Alloy Actuators for Morphing Laminar Wing with Flexible Extrados. J. Mech. Des. 2009, 131, 091006. [Google Scholar] [CrossRef]
- Botez, R.M. Morphing wing, UAV and aircraft multidisciplinary studies at the laboratory of applied research in active controls, avionics and aeroeervoelasticity LARCASE. Aerosp. J. 2018, 14, 1–11. [Google Scholar]
- Driesen, J.; Santos, O.; Annes da Silva, R.G.; Goes, L. Antagonistic Shape Memory Alloy Wire as an Actuator in a Morphing Wing. In Proceedings of the 2018 AIAA/AHS Adaptive Structures Conference, Kissimmee, FL, USA, 8–12 January 2018; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2018. [Google Scholar]
- Ameduri, S.; Concilio, A. A Shape Memory Alloy Torsion Actuator for Static Blade Twist. J. Intell. Mater. Syst. Struct. 2019, 30, 2605–2626. [Google Scholar] [CrossRef]
- Kim, N.-G.; Han, M.-W.; Iakovleva, A.; Park, H.-B.; Chu, W.-S.; Ahn, S.-H. Hybrid Composite Actuator with Shape Retention Capability for Morphing Flap of Unmanned Aerial Vehicle (UAV). Compos. Struct. 2020, 243, 112227. [Google Scholar] [CrossRef]
- Jodin, G.; Tekap, Y.B.; Saucray, J.M.; Rouchon, J.F.; Triantafyllou, M.; Braza, M. Optimized Design of Real-Scale A320 Morphing High-Lift Flap with Shape Memory Alloys and Innovative Skin. Smart Mater. Struct. 2018, 27, 115005. [Google Scholar] [CrossRef] [Green Version]
- Leal, P.B.; Petterson, R.; Hartl, D.J. Design Optimization toward a Shape Memory Alloy-Based Bio-Inspired Morphing Wing. In Proceedings of the 25th AIAA/AHS Adaptive Structures Conference, Grapevine, TX, USA, 9–13 January 2017; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2017. [Google Scholar]
- Leal, P.B.; Stroud, H.; Sheahan, E.; Cabral, M.; Hartl, D.J. Skin-Based Camber Morphing Utilizing Shape Memory Alloy Composite Actuators in a Wind Tunnel Environment. In Proceedings of the 2018 AIAA/AHS Adaptive Structures Conference, Kissimmee, FL, USA, 8–12 January 2018; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2018. [Google Scholar]
- Msomi, V.; Oliver, G.J. Smart Morphing Based on Shape Memory Alloy Plate. J. Eng. Des. Technol. 2016, 14, 475–488. [Google Scholar] [CrossRef]
- Aso, A.; Perrey, M.; Tanaka, H. Experimental Study on Wing Twist-Morphing Structure Using a Double-Tube Cylinder. Aerosp. Technol. Jpn. 2017, 15, a1–a6. [Google Scholar] [CrossRef]
- DiPalma, M.; Gandhi, F. Autonomous Camber Morphing of a Helicopter Rotor Blade with Temperature Change Using Integrated Shape Memory Alloys. J. Intell. Mater. Syst. Struct. 2021, 32, 499–515. [Google Scholar] [CrossRef]
- Zhang, W.; Nie, X.T.; Gao, X.Y.; Chen, W.H. Conceptual Design and Numerical Studies of Active Flow Control Aerofoil Based on Shape-Memory Alloy and Macro Fibre Composites. Aeronaut. J. 2021, 125, 830–846. [Google Scholar] [CrossRef]
- Chaudhari, R.; Vora, J.; López de Lacalle, L.N.; Khanna, S.; Patel, V.K.; Ayesta, I. Parametric Optimization and Effect of Nano-Graphene Mixed Dielectric Fluid on Performance of Wire Electrical Discharge Machining Process of Ni55.8Ti Shape Memory Alloy. Materials 2021, 14, 2533. [Google Scholar] [CrossRef] [PubMed]
- Hou, H.; Li, J.; Chen, C.; Qiu, C. Uncertainty Analysis of a Shape Memory Alloy Model for Dynamic Analysis. Smart Mater. Struct. 2021, 30, 025017. [Google Scholar] [CrossRef]
- Islam, A.B.M.R.; Karadoğan, E. Sensitivity and Uncertainty Analysis of One-Dimensional Tanaka and Liang-Rogers Shape Memory Alloy Constitutive Models. Materials 2019, 12, 1687. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fahimi, P.; Zakerzadeh, M.R.; Baghani, M. A Combined Experimental and Numerical Study on Shape Memory Alloy Rods under Torsion. J. Intell. Mater. Syst. Struct. 2019, 30, 2222–2233. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, W.; Zhu, J.; Xu, Y.; Gu, X.; Moumni, Z. Finite Element Simulation of Thermomechanical Training on Functional Stability of Shape Memory Alloy Wave Spring Actuator. J. Intell. Mater. Syst. Struct. 2019, 30, 1239–1251. [Google Scholar] [CrossRef]
- Wang, J.; Moumni, Z.; Zhang, W. A Thermomechanically Coupled Finite-Strain Constitutive Model for Cyclic Pseudoelasticity of Polycrystalline Shape Memory Alloys. Int. J. Plast. 2017, 97, 194–221. [Google Scholar] [CrossRef]
- Roh, J.-H.; Han, J.-H.; Lee, I. Nonlinear Finite Element Simulation of Shape Adaptive Structures with SMA Strip Actuator. J. Intell. Mater. Syst. Struct. 2006, 17, 1007–1022. [Google Scholar] [CrossRef]
- Oehler, S.D.; Hartl, D.J.; Lopez, R.; Malak, R.J.; Lagoudas, D.C. Design Optimization and Uncertainty Analysis of SMA Morphing Structures. Smart Mater. Struct. 2012, 21, 094016. [Google Scholar] [CrossRef]
- Ameduri, S.; Brindisi, A.; Tiseo, B.; Concilio, A.; Pecora, R. Optimization and Integration of Shape Memory Alloy (SMA)-Based Elastic Actuators within a Morphing Flap Architecture. J. Intell. Mater. Syst. Struct. 2012, 23, 381–396. [Google Scholar] [CrossRef]
- Saputo, S.; Sellitto, A.; Battaglia, M.; Sebastiano, V.; Riccio, A. Numerical Simulation of the Mechanical Behaviour of Shape Memory Alloys Based Actuators. Mater. Today Proc. 2021, 34, 57–64. [Google Scholar] [CrossRef]
- Boyd, J.G.; Lagoudas, D.C. A Thermodynamical Constitutive Model for Shape Memory Materials. Part, I. The Monolithic Shape Memory Alloy. Int. J. Plast. 1996, 12, 805–842. [Google Scholar] [CrossRef]
- Lagoudas, D.; Hartl, D.; Chemisky, Y.; Machado, L.; Popov, P. Constitutive Model for the Numerical Analysis of Phase Transformation in Polycrystalline Shape Memory Alloys. Int. J. Plast. 2012, 32–33, 155–183. [Google Scholar] [CrossRef]
- Neugebauer, R.; Bucht, A.; Pagel, K.; Jung, J. Numerical Simulation of the Activation Behavior of Thermal Shape Memory Alloys. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 7–11 March 2010; p. 76450J. [Google Scholar]
- Wilson, G.; Lagoudas, D.; Hartl, D. Designing a Morphable Parabolic Reflector Antenna Using Origami-Inspired Discretization and Efficient Global Optimization. In Proceedings of the ASME 2020 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Virtual, Online, 15 September 2020; American Society of Mechanical Engineers: New York, NY, USA, 2020; p. V001T03A017. [Google Scholar]
- Li, J.F.; Nie, X.T.; Zhang, W.; Ma, Y.Y. Finite-Element Simulation of a Resonant Frequency-Tunable Vibration Isolator Based on Shape Memory Alloy Wire. J. Vib. Eng. Technol. 2022, in press. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Properties | Value |
|---|---|
| Wire diameter | 1 mm |
| Martensite start temperature Ms | 302 K |
| Martensite finish temperature Mf | 291 K |
| Austenite start temperature As | 326 K |
| Austenitic finish temperature Af | 336 K |
| Young’s martensitic modulus EM | 2 × 104 MPa |
| Young’s austenitic modulus EA | 4 × 104 MPa |
| Poisson’s ratio (equal for both phases) μ | 0.33 |
| Coefficient of thermal expansion for the martensite αM | 2.2 × 10−5 |
| Coefficient of thermal expansion for the austenite αA | 2.2 × 10−5 |
| Maximum transformation strain H | 0.034 |
| Stress influence coefficient (equal for both phases) ρ∆s0 | −0.3131 |
| 336 MPa | |
| 415 MPa | |
| 148 MPa | |
| 63 MPa |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Ma, Y.; Gao, X.; Chen, W.; Nie, X. Design of a Morphing Skin with Shape Memory Alloy Based on Equivalent Thermal Stress Approach. Micromachines 2022, 13, 939. https://doi.org/10.3390/mi13060939
Zhang W, Ma Y, Gao X, Chen W, Nie X. Design of a Morphing Skin with Shape Memory Alloy Based on Equivalent Thermal Stress Approach. Micromachines. 2022; 13(6):939. https://doi.org/10.3390/mi13060939
Chicago/Turabian StyleZhang, Wei, Yueyin Ma, Xinyu Gao, Wanhua Chen, and Xutao Nie. 2022. "Design of a Morphing Skin with Shape Memory Alloy Based on Equivalent Thermal Stress Approach" Micromachines 13, no. 6: 939. https://doi.org/10.3390/mi13060939
APA StyleZhang, W., Ma, Y., Gao, X., Chen, W., & Nie, X. (2022). Design of a Morphing Skin with Shape Memory Alloy Based on Equivalent Thermal Stress Approach. Micromachines, 13(6), 939. https://doi.org/10.3390/mi13060939