
Vision-Based Automated Control of Magnetic Microrobots



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
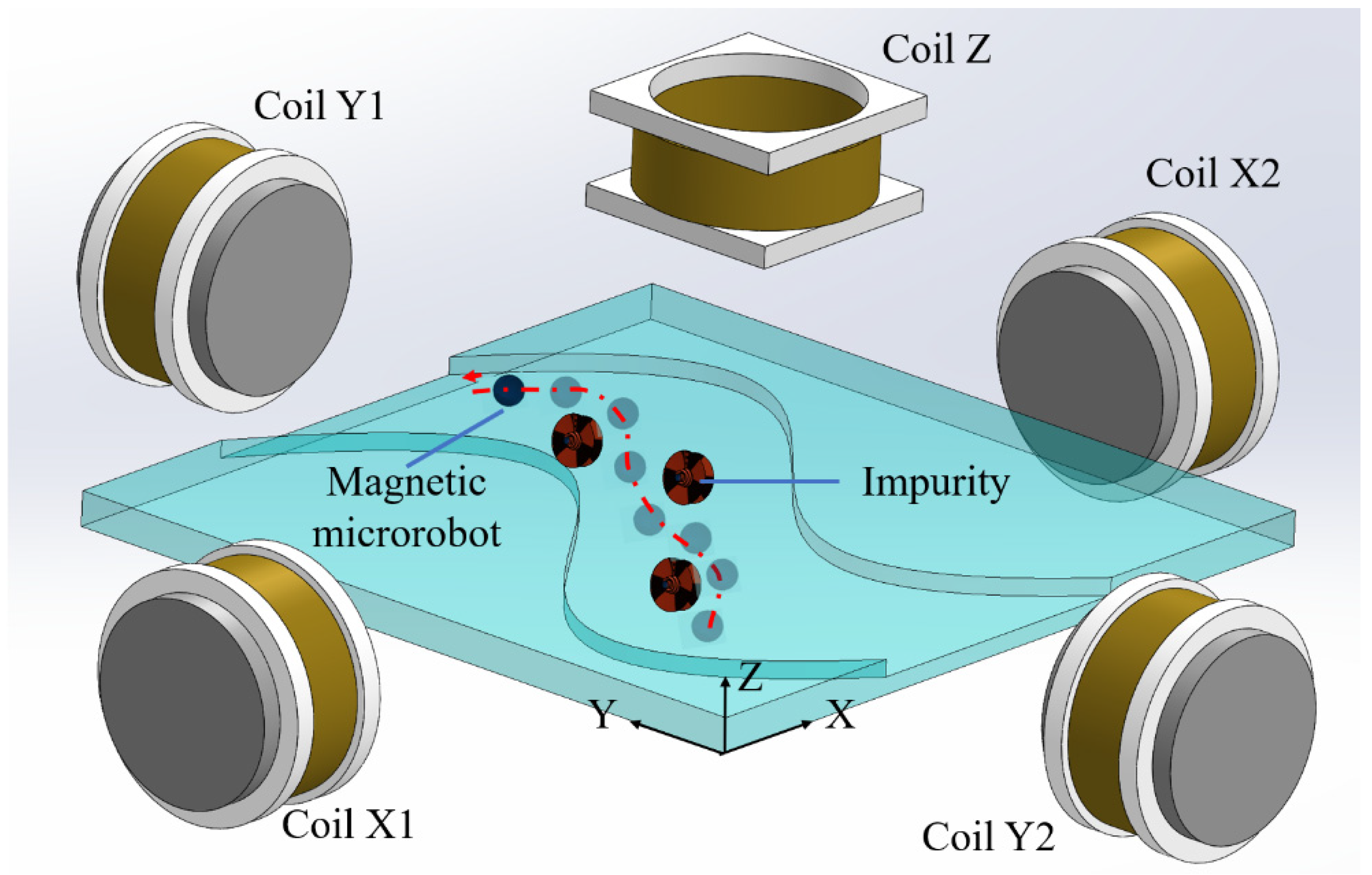
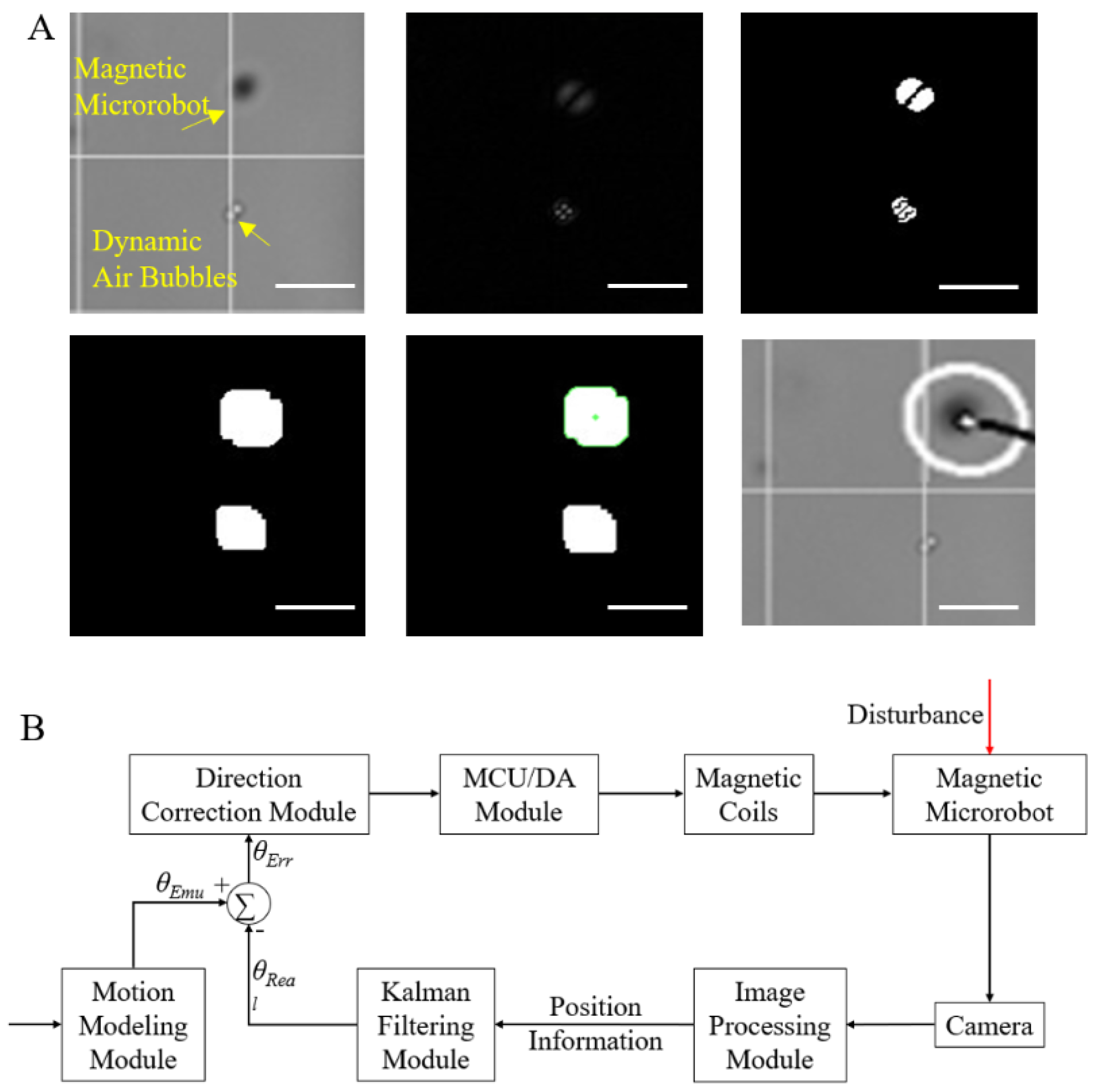
2.1. Motion Control of Magnetic Microrobot
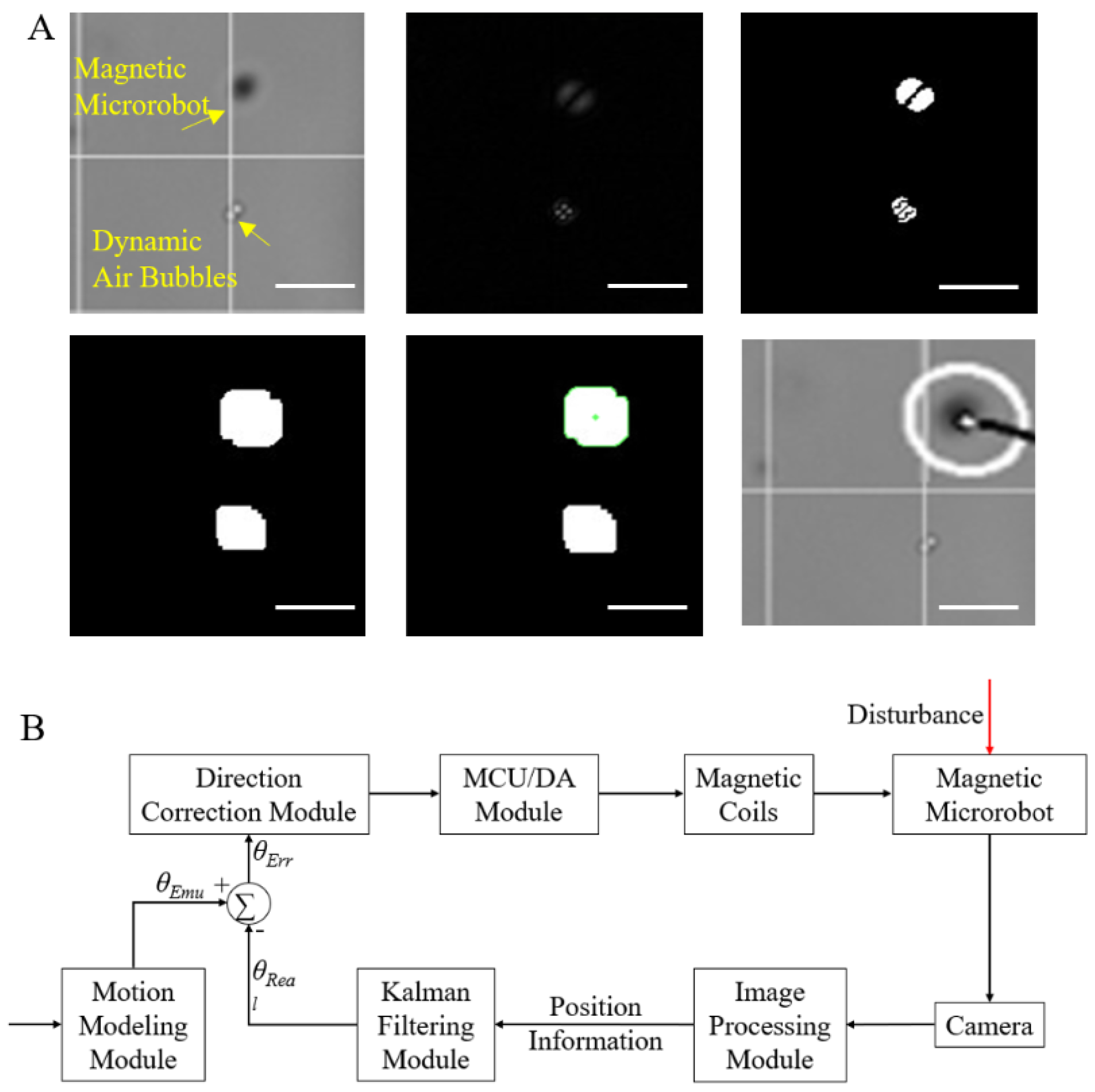
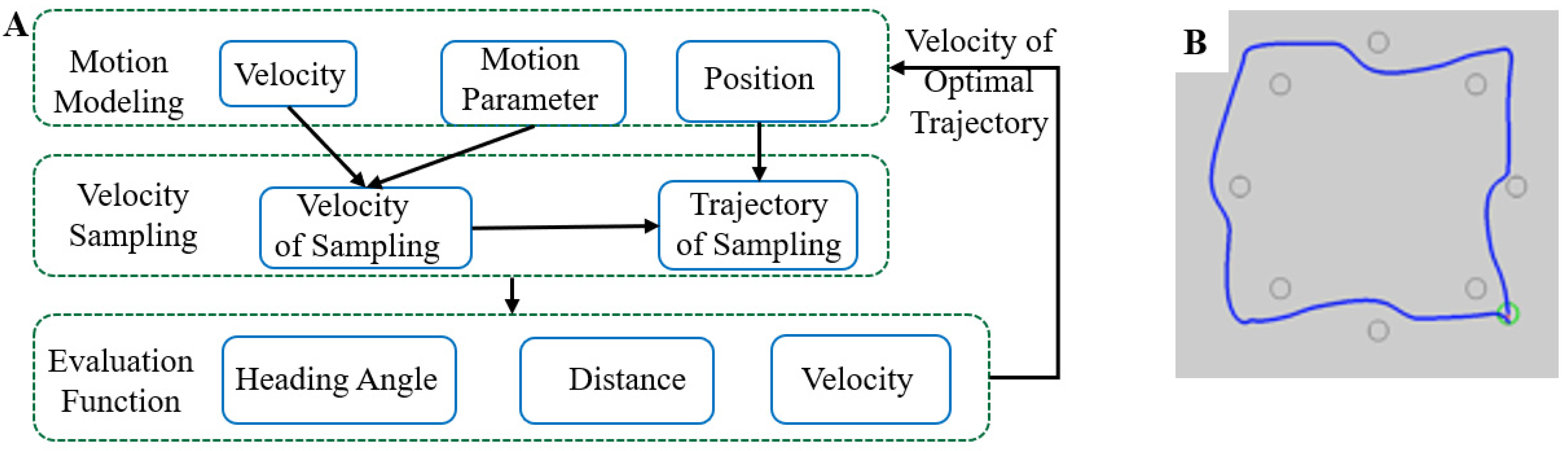
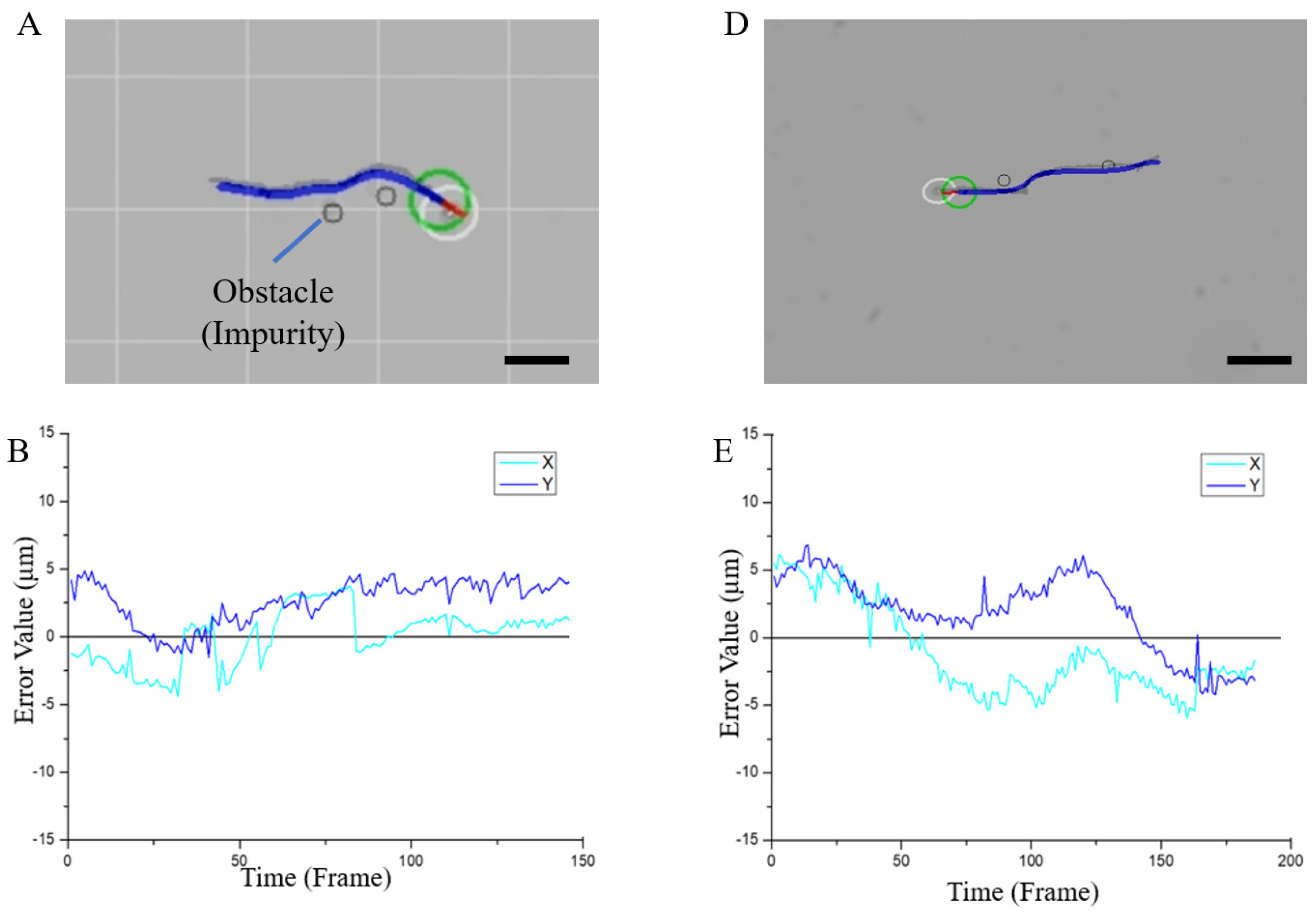
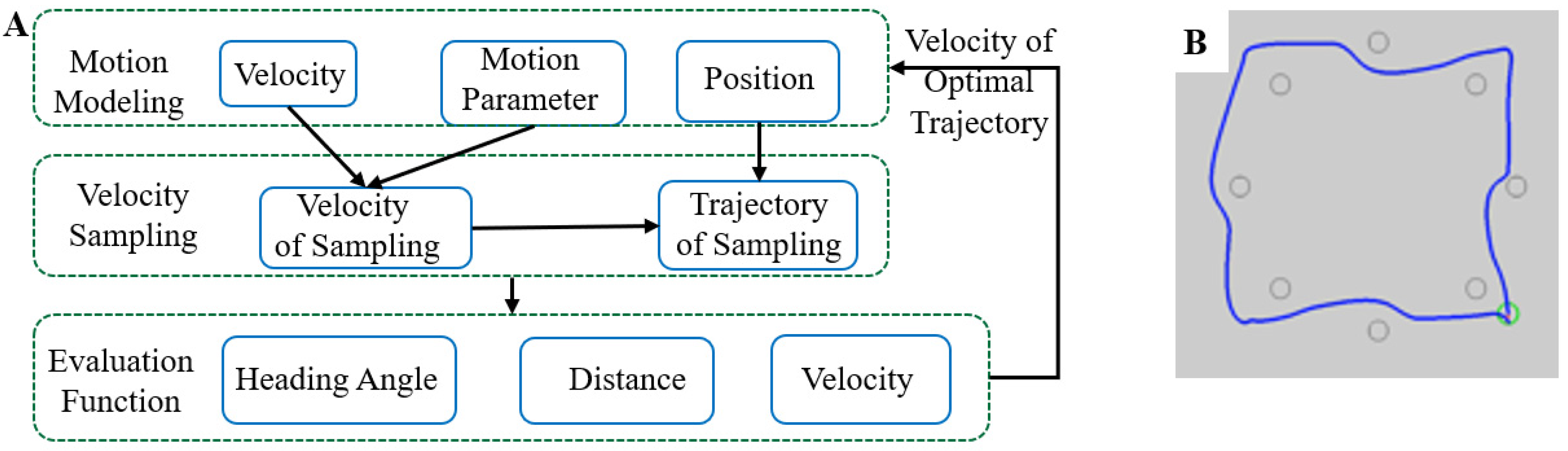
2.2. Intelligent Obstacle Avoidance Control
3. Experiments and Results
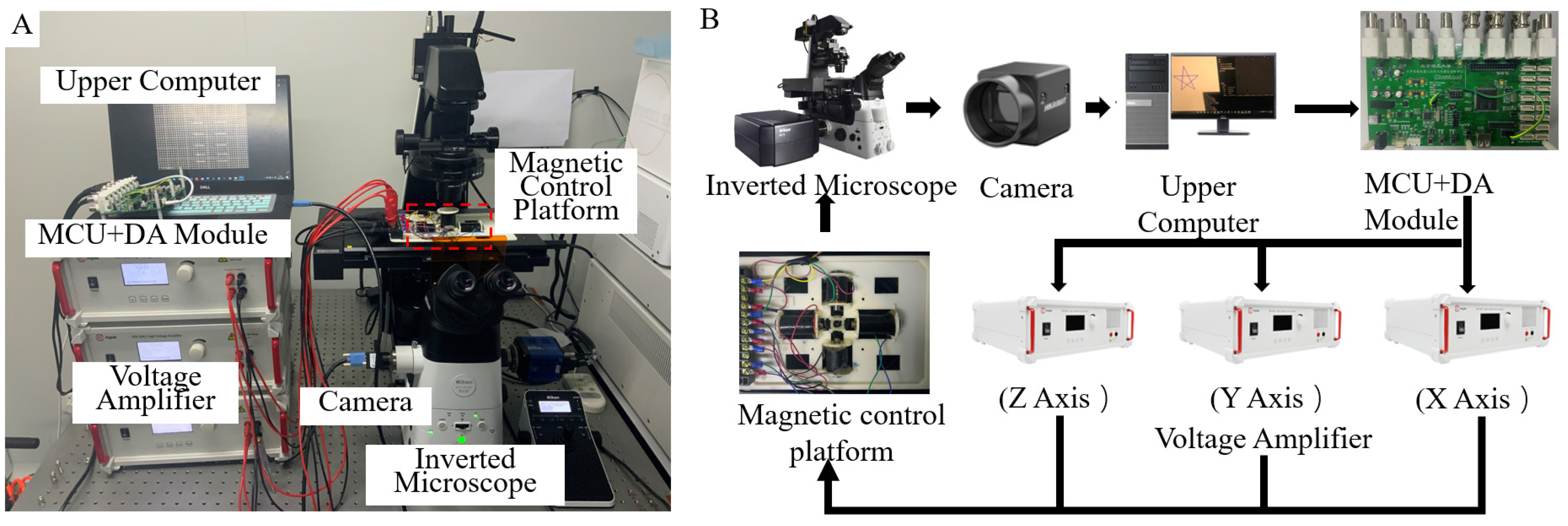
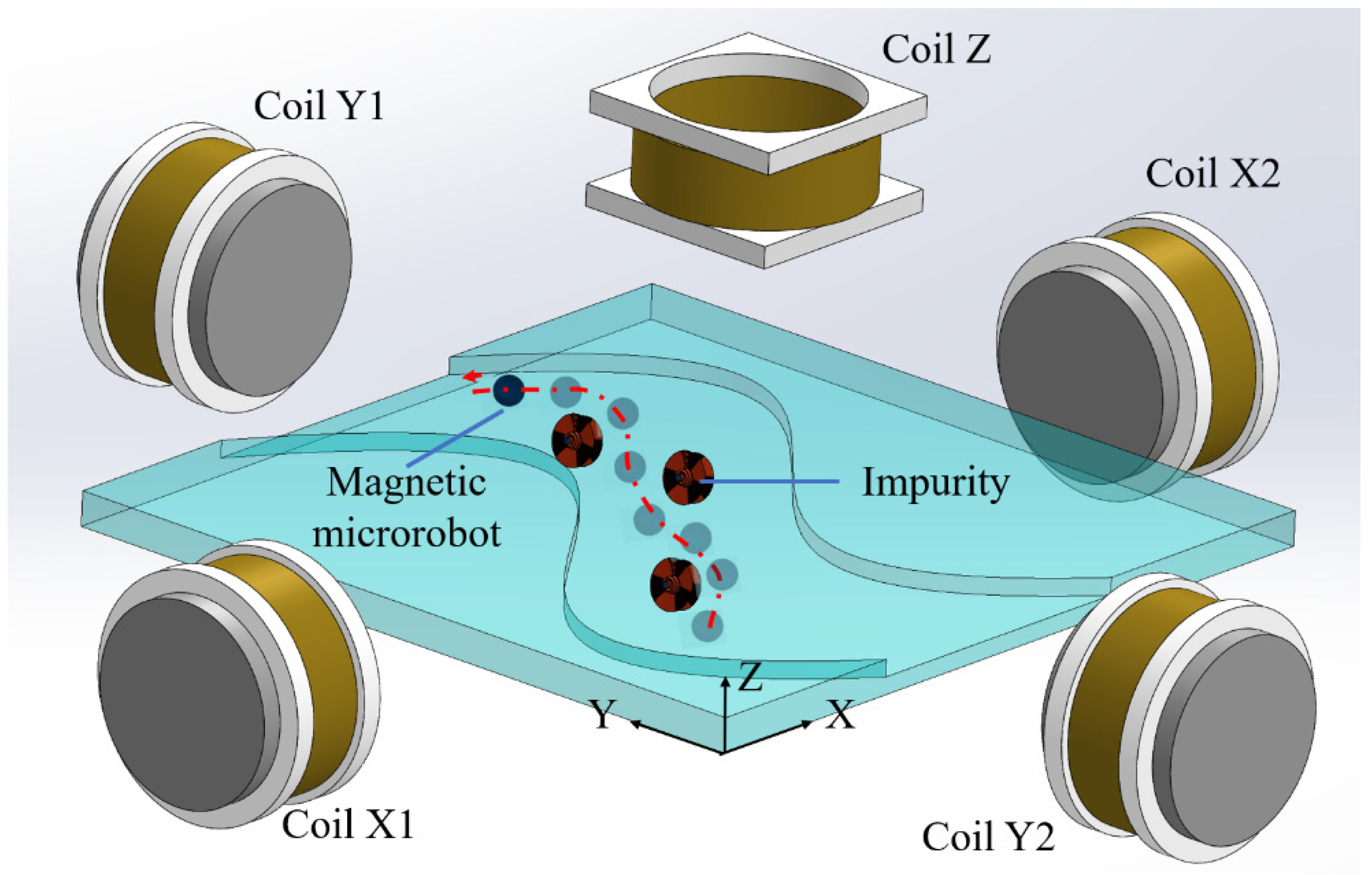
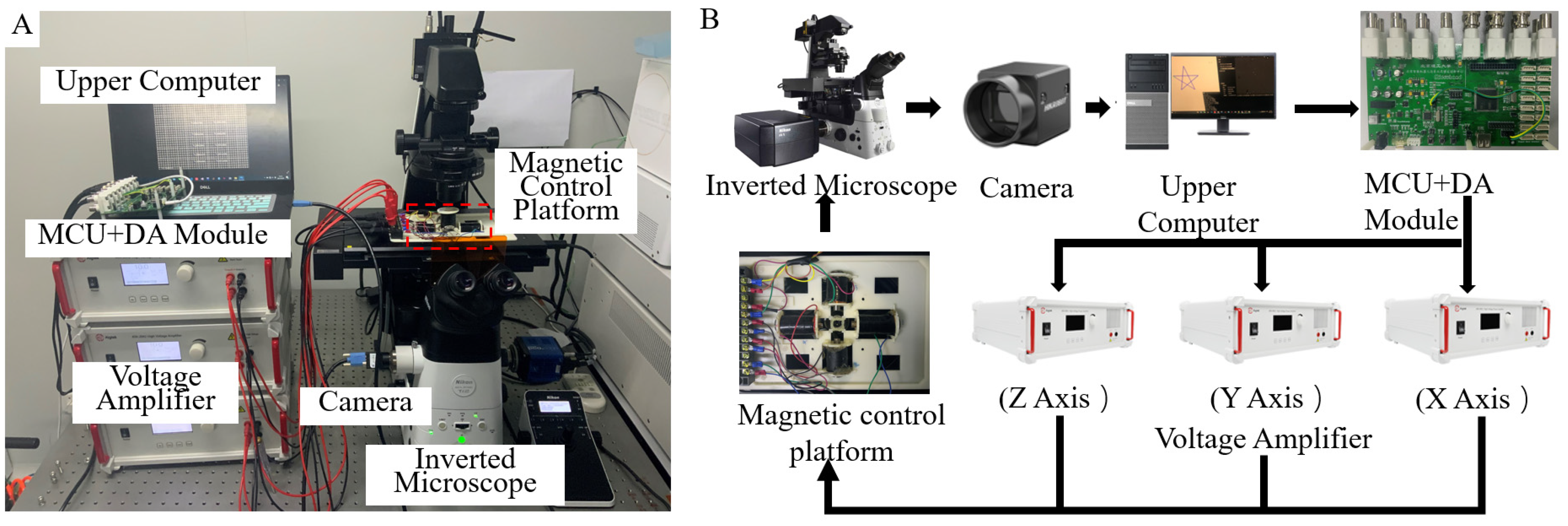
3.1. System Setup
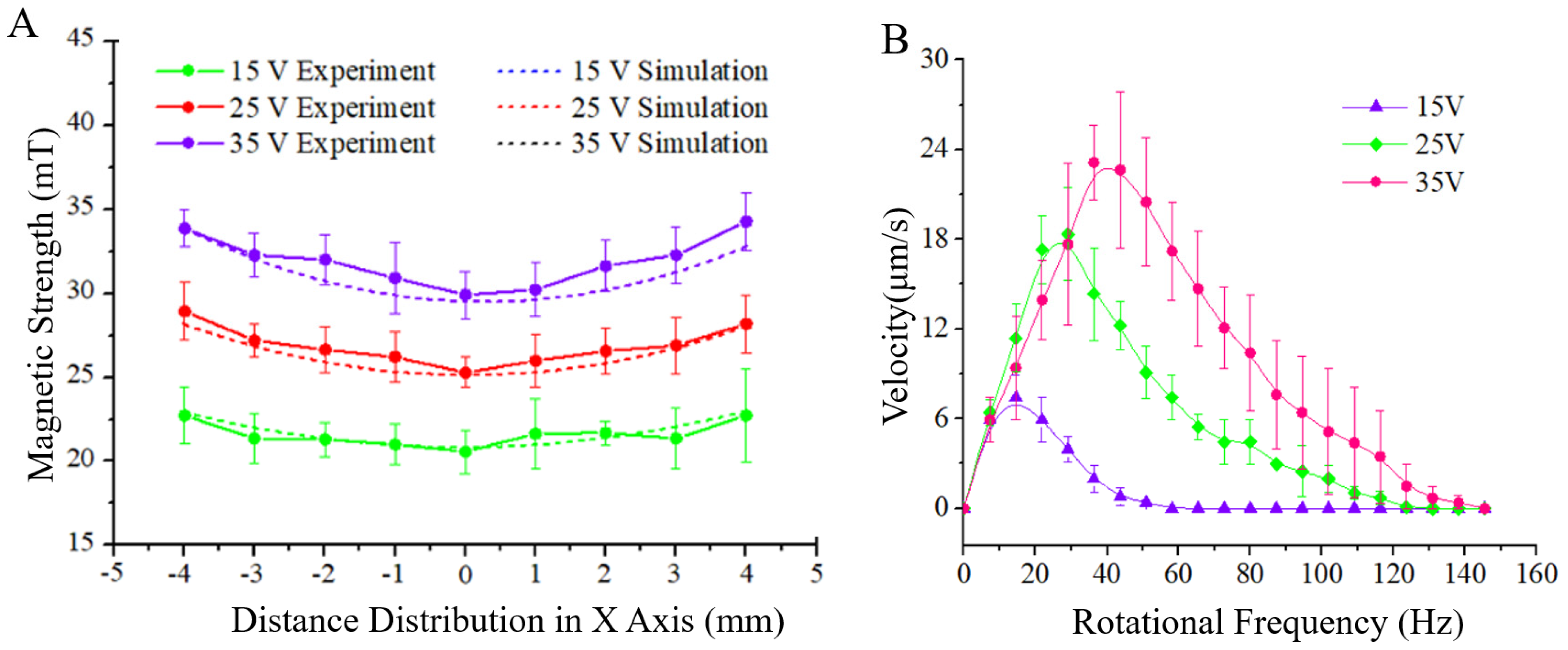
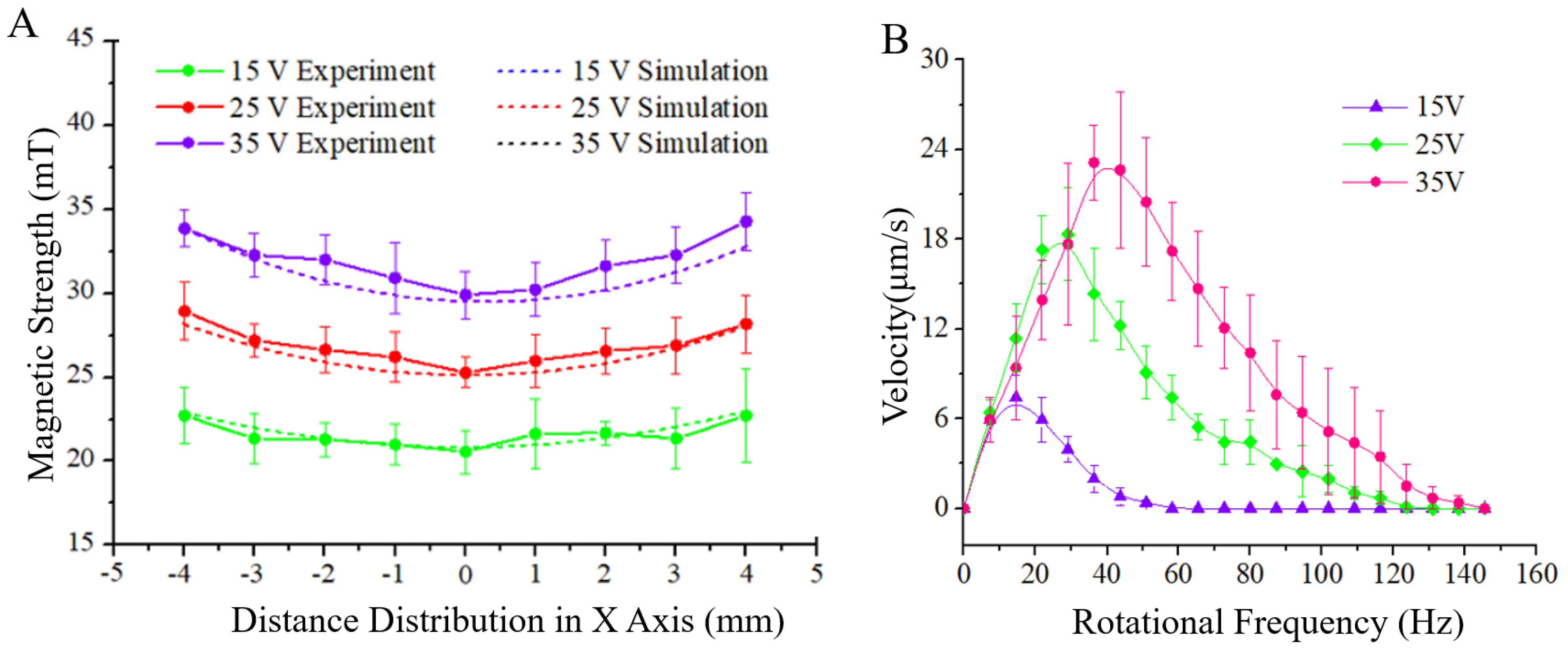
3.2. Calibration: Magnetic Field System and Robot Motion
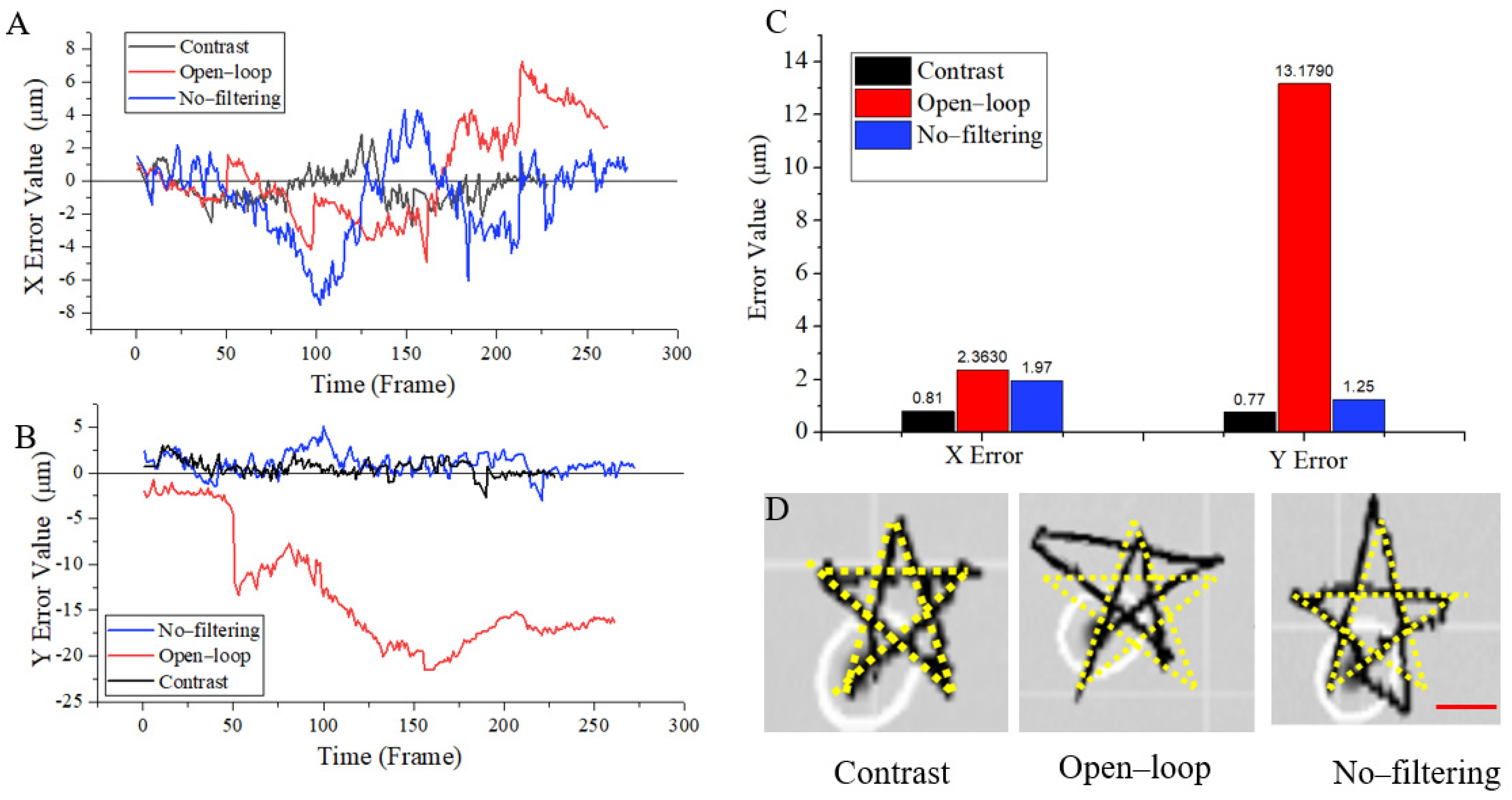
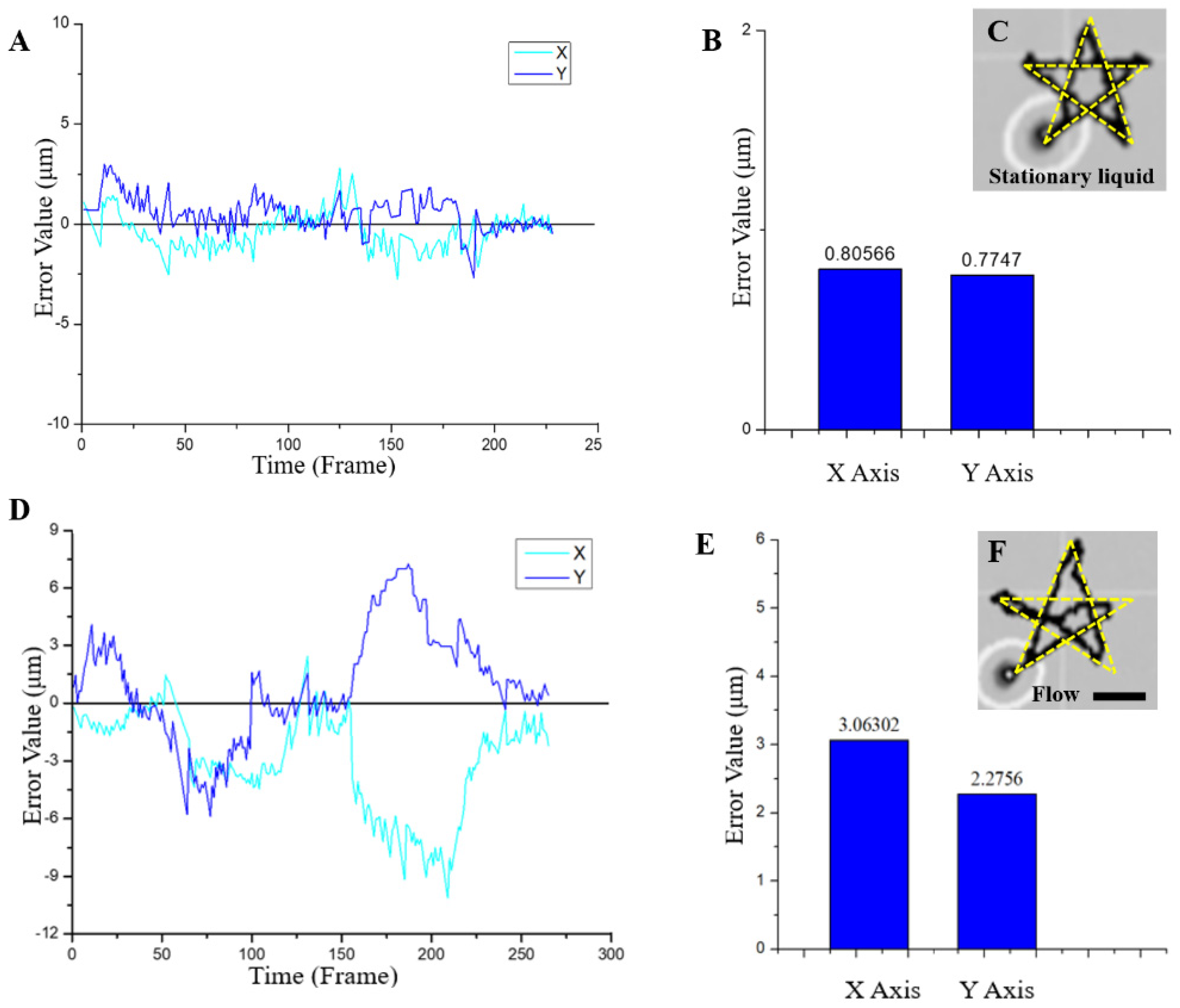
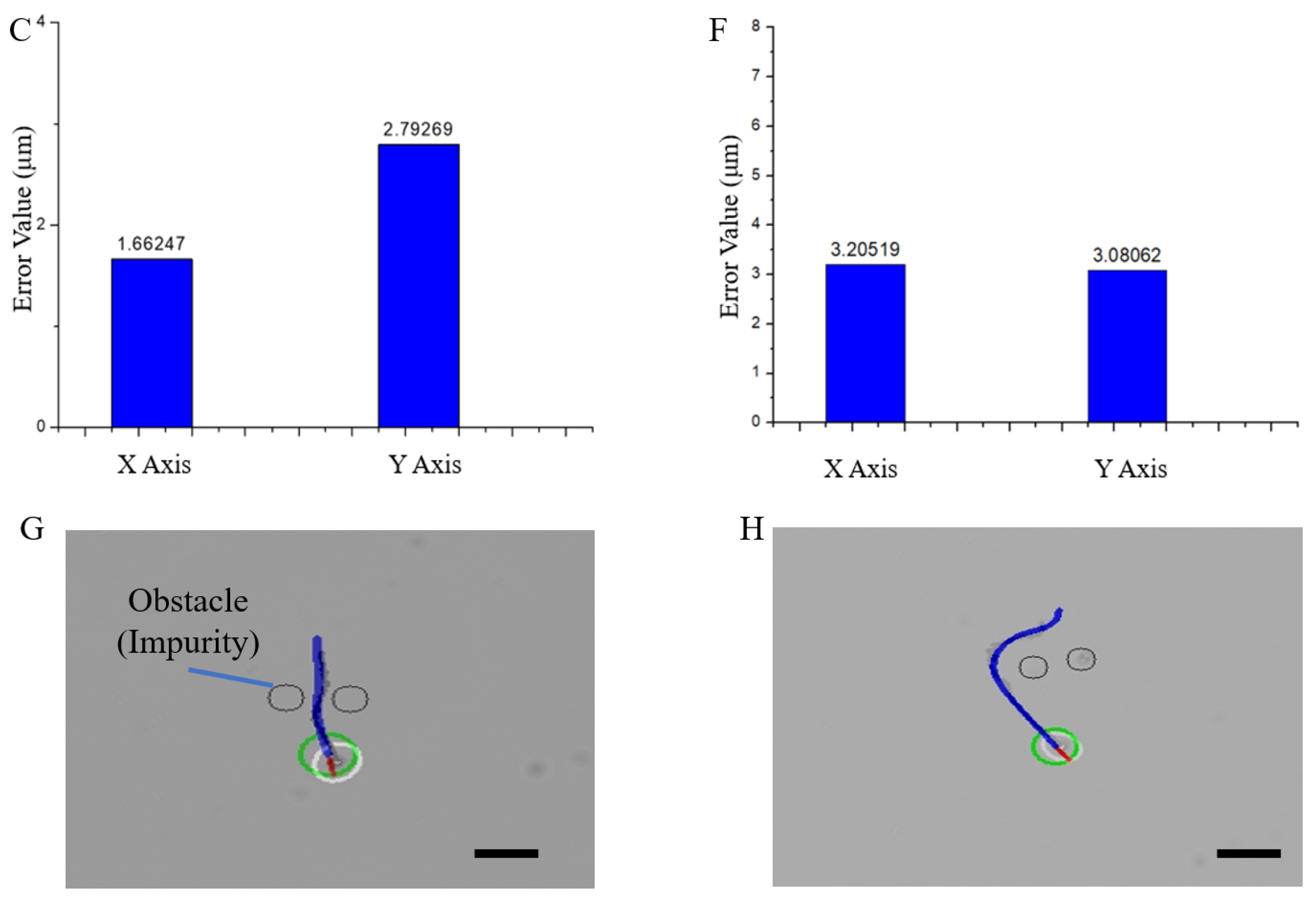
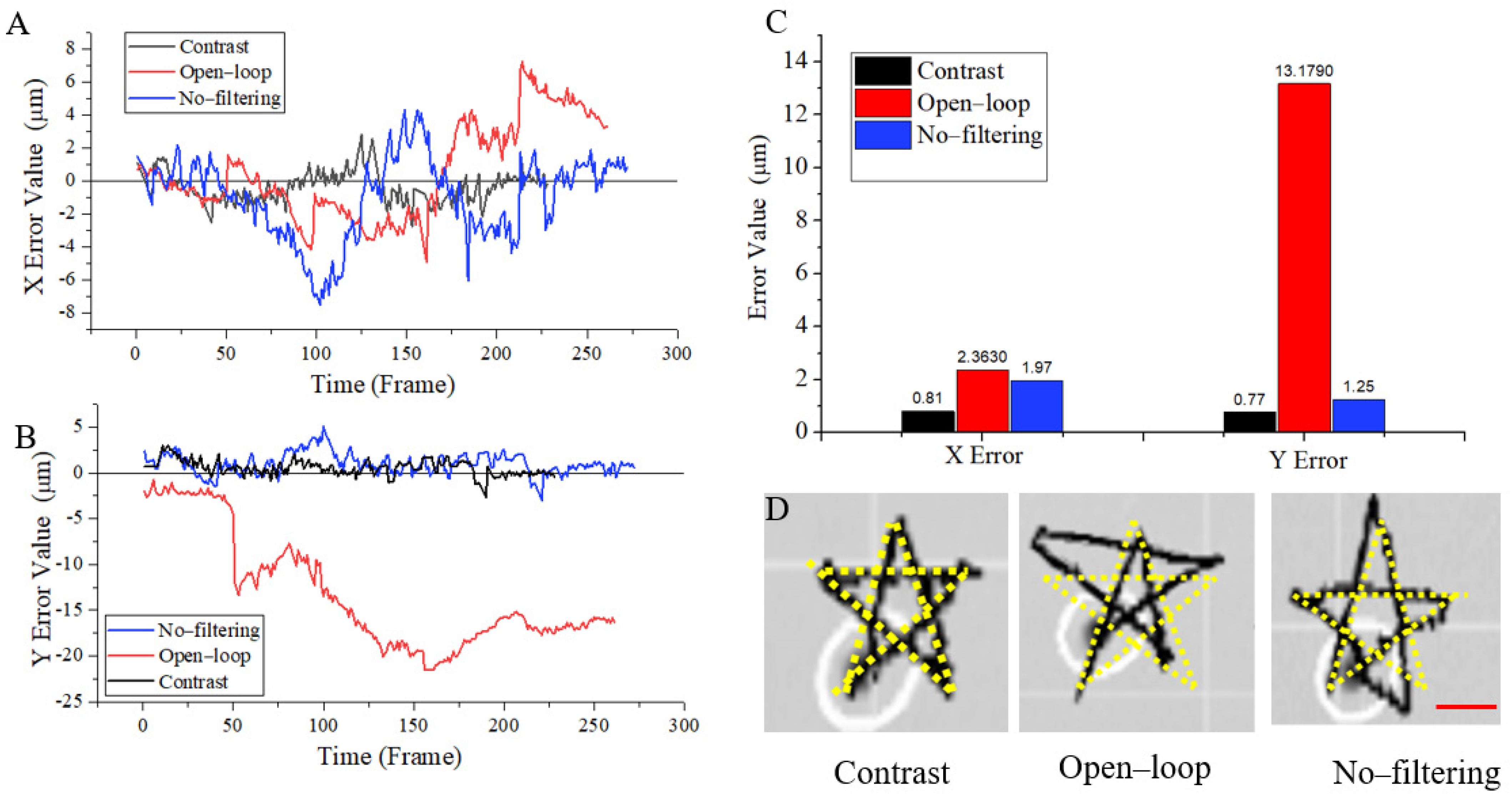
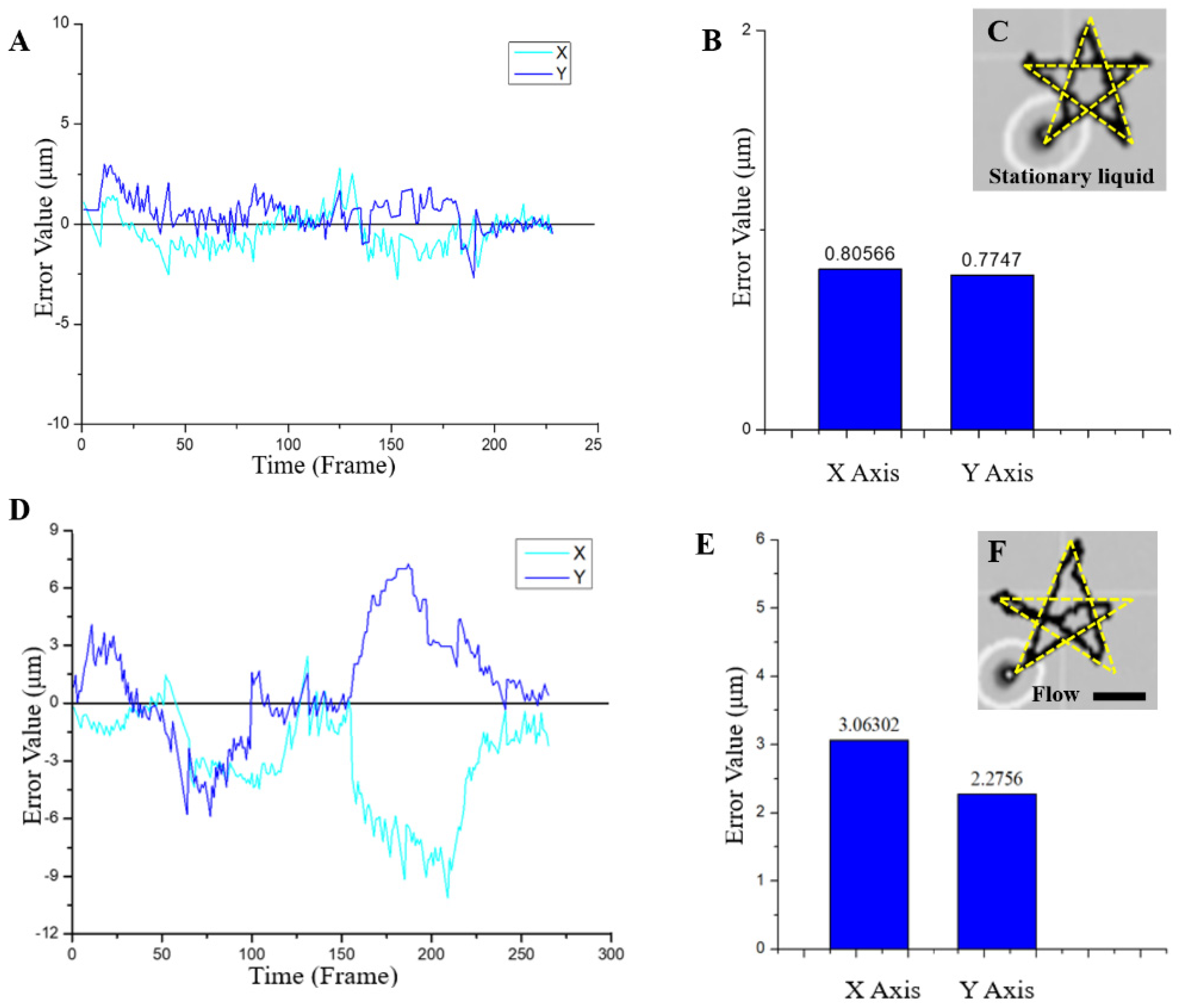
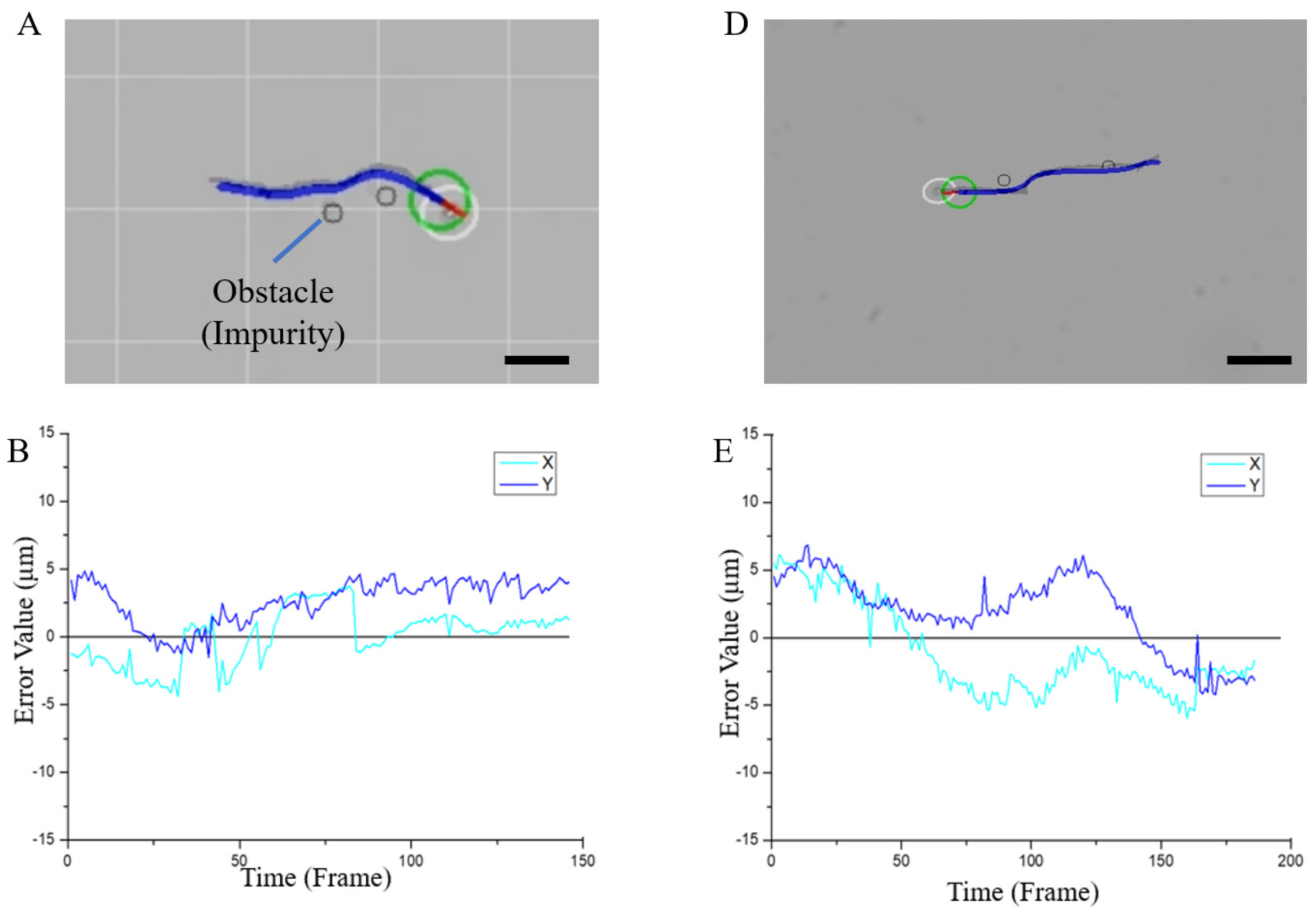
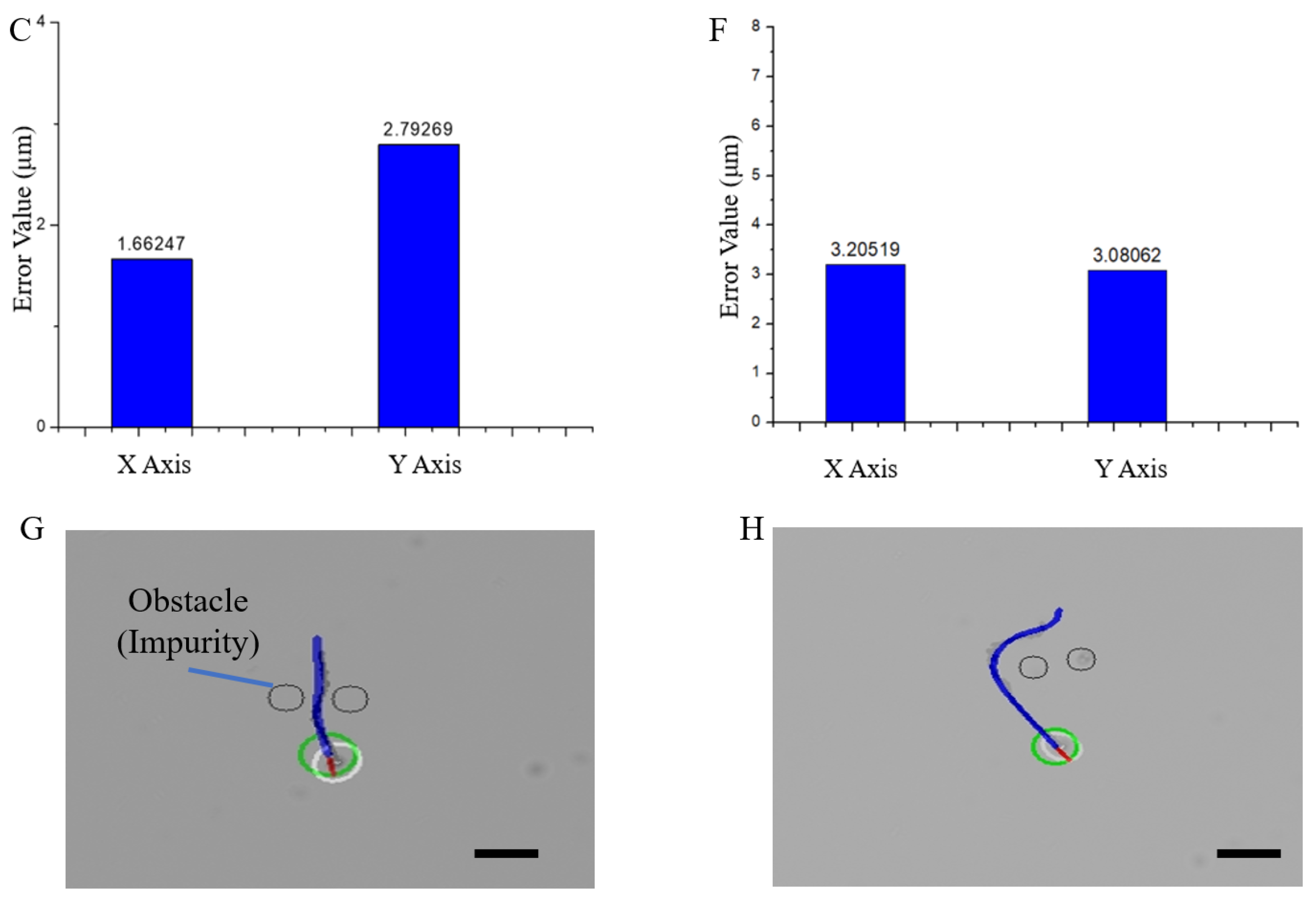
3.3. Vision-Based Navigated Locomotion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nelson, B.; Kaliakatsos, I.; Abbott, J. Microrobots for Minimally Invasive Medicine. Annu. Rev. Biomed. Eng. 2010, 12, 55–85. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sitti, M.; Ceylan, H.; Hu, W.; Giltinan, J.; Turan, M.; Yim, S.; Diller, E. Biomedical Applications of Untethered Mobile Milli/Microrobots. Proc. IEEE 2015, 103, 205–224. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Esteban-Fernández de Ávila, B.; Gao, W.; Zhang, L.; Wang, J. Micro/Nanorobots for Biomedicine: Delivery, Surgery, Sensing, and Detoxification. Sci. Robot. 2017, 2, aam6431. [Google Scholar] [CrossRef]
- Wang, Y.; Li, W.; Togo, S.; Yokoi, H.; Jiang, Y. Survey on Main Drive Methods Used in Humanoid Robotic Upper Limbs. Cyborg Bionic Syst. 2021, 2021, 9817487. [Google Scholar] [CrossRef]
- Wang, H.; Kan, J.; Zhang, X.; Gu, C.; Yang, Z. Pt/CNT Micro-Nanorobots Driven by Glucose Catalytic Decomposition. Cyborg Bionic Syst. 2021, 2021, 9876064. [Google Scholar] [CrossRef]
- So, J.; Kim, U.; Kim, Y.B.; Seok, D.-Y.; Yang, S.Y.; Kim, K.; Park, J.H.; Hwang, S.T.; Gong, Y.J.; Choi, H.R. Shape Estimation of Soft Manipulator Using Stretchable Sensor. Cyborg Bionic Syst. 2021, 2021, 9843894. [Google Scholar] [CrossRef]
- Nakadate, R.; Iwasa, T.; Onogi, S.; Arata, J.; Oguri, S.; Okamoto, Y.; Akahoshi, T.; Eto, M.; Hashizume, M. Surgical Robot for Intraluminal Access: An Ex Vivo Feasibility Study. Cyborg Bionic Syst. 2020, 2020, 8378025. [Google Scholar] [CrossRef]
- Hu, Y. Self-Assembly of DNA Molecules: Towards DNA Nanorobots for Biomedical Applications. Cyborg Bionic Syst. 2021, 2021, 9807520. [Google Scholar] [CrossRef]
- Avci, E.; Ohara, K.; Nguyen, C.N.; Theeravithayangkura, C.; Kojima, M.; Tanikawa, T.; Mae, Y.; Arai, T. High-speed automated manipulation of microobjects using a two-fingered microhand. IEEE Trans. Ind. Electron. 2015, 62, 1070–1079. [Google Scholar] [CrossRef]
- Liu, X.; Shi, Q.; Lin, Y.; Kojima, M.; Mae, Y.; Fukuda, T.; Huang, Q.; Arai, T. Multifunctional Noncontact Micromanipulation Using Whirling Flow Generated by Vibrating a Single Piezo Actuator. Small 2019. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Liu, I.K.-K. Optical Tweezers for single cells. J. R. Soc. Interface 2008, 5, 671–690. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xie, H.; Fan, X.; Sun, M.; Lin, Z.; He, Q.; Sun, L. Programmable Generation and Motion Control of a Snakelike Magnetic Microrobot Swarm. IEEE/ASME Trans. Mechatron. 2019, 24, 902–912. [Google Scholar] [CrossRef]
- Fan, X.; Sun, M.; Lin, Z.; Song, J.; He, Q.; Sun, L.; Xie, H. Automated Noncontact Micromanipulation Using Magnetic Swimming Microrobots. IEEE Trans. Nanotechnol. 2018, 17, 666–669. [Google Scholar] [CrossRef]
- Li, N.; Hu, J. Sound-Controlled Rotary Driving of a Single Nanowire. IEEE Trans. Nanotechnol. 2014, 13, 437–441. [Google Scholar] [CrossRef]
- Guo, F.; Mao, Z.; Chen, Y.; Xie, Z.; Lata, J.P.; Li, P.; Ren, L.; Liu, J.; Yang, J.; Dao, M. Three-dimensional manipulation of single cells using surface acoustic waves. Proc. Natl. Acad. Sci. USA 2016, 113, 1522. [Google Scholar] [CrossRef] [Green Version]
- Nama, N.; Huang, T.J.; Mao, Z.; Benkovic, S.J.; Fick, J.R.; Li, S.; Li, P.; Guo, F.; French, J.B.; Zhao, H. Controlling cell–cell interactions using surface acoustic waves. Proc. Natl. Acad. Sci. USA 2014, 112, 43–48. [Google Scholar] [CrossRef] [Green Version]
- Voldman, J. Electrical forces for microscale cell manipulation. Annu. Rev. Biomed. Eng. 2006, 8, 425–454. [Google Scholar] [CrossRef] [Green Version]
- Ongaro, F.; Pane, S.; Scheggi, S.; Misra, S. Design of an Electromagnetic Setup for Independent Three-Dimensional Control of Pairs of Identical and Nonidentical Microrobots. IEEE Trans. Robot. 2019, 35, 174–183. [Google Scholar] [CrossRef] [Green Version]
- Xu, T.; Gao, W.; Xu, L.-P.; Zhang, X.; Wang, S. Fuel-Free Synthetic Micro-/Nanomachines. Adv. Mater. 2017, 29, 1603250. [Google Scholar] [CrossRef]
- Zarrouk, A.; Belharet, K.; Tahri, O. Vision-based magnetic actuator positioning for wireless control of microrobots. Rob. Auton. Syst. 2020, 124, 103366. [Google Scholar] [CrossRef]
- Kummer, M.P.; Abbott, J.J.; Kratochvil, B.E.; Borer, R.; Sengul, A.; Nelson, B.J. OctoMag: An Electromagnetic System for 5-DOF Wireless Micromanipulation. IEEE Trans. Robot. 2010, 26, 1006–1017. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, Y.; Wang, Q.; Chan, K.F.; Zhang, L. Automated Control of Magnetic Spore-Based Microrobot Using Fluorescence Imaging for Targeted Delivery with Cellular Resolution. IEEE Trans. Autom. Sci. Eng. 2020, 17, 490–501. [Google Scholar] [CrossRef]
- Zheng, L.; Jia, Y.; Dong, D.; Lam, W.; Li, D.; Ji, H.; Sun, D. 3D Navigation Control of Untethered Magnetic Microrobot in Centimeter-Scale Workspace Based on Field-of-View Tracking Scheme. IEEE Trans. Robot. 2021, 1–16. [Google Scholar] [CrossRef]
- Tung, H.W.; Pieters, R.S.; Sargent, D.F.; Nelson, B.J. Non-contact Manipulation for Automated Protein Crystal Harvesting Using a Rolling Microrobot. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; Volume 19, ISBN 9783902823625. [Google Scholar] [CrossRef]
- Charreyron, S.; Pieters, R.S.; Tung, H.-W.; Gonzenbach, M.; Nelson, B.J. Navigation of a rolling microrobot in cluttered environments for automated crystal harvesting. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 Septermber–2 October 2015; pp. 177–182. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.W.; Chao, Q.; Sakar, M.S.; Nelson, B.J. Optimization of Tail Geometry for the Propulsion of Soft Microrobots. IEEE Robot. Autom. Lett. 2017, 2, 727–732. [Google Scholar] [CrossRef]
- Pieters, R.; Lombriser, S.; Alvarez-Aguirre, A.; Nelson, B.J. Model Predictive Control of a Magnetically Guided Rolling Microrobot. IEEE Robot. Autom. Lett. 2016, 1, 455–460. [Google Scholar] [CrossRef] [Green Version]
- Lin, Z.; Fan, X.; Sun, M.; Gao, C.; He, Q.; Xie, H. Magnetically Actuated Peanut Colloid Motors for Cell Manipulation and Patterning. ACS Nano 2018, 12, 2539–2545. [Google Scholar] [CrossRef] [PubMed]
- Pieters, R.; Tung, H.-W.; Charreyron, S.; Sargent, D.F.; Nelson, B.J. RodBot: A rolling microrobot for micromanipulation. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4042–4047. [Google Scholar] [CrossRef] [Green Version]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef] [Green Version]
- Cheang, U.K.; Meshkati, F.; Kim, D.; Kim, M.J.; Fu, H.C. Minimal geometric requirements for micropropulsion via magnetic rotation. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2014, 90, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Benhal, P.; Quashie, D.; Cheang, U.K.; Ali, J. Propulsion kinematics of achiral microswimmers in viscous fluids. Appl. Phys. Lett. 2021, 118. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, Z.; Quashie, D.; Benhal, P.; Ali, J.; Kim, M.J.; Cheang, U.K. Propulsion of magnetically actuated achiral planar microswimmers in Newtonian and non-Newtonian fluids. Sci. Rep. 2021, 11, 21190. [Google Scholar] [CrossRef] [PubMed]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, X.; Li, Y.; Liu, X.; Liu, D.; Chen, Z.; Arai, T. Vision-Based Automated Control of Magnetic Microrobots. Micromachines 2022, 13, 337. https://doi.org/10.3390/mi13020337
Tang X, Li Y, Liu X, Liu D, Chen Z, Arai T. Vision-Based Automated Control of Magnetic Microrobots. Micromachines. 2022; 13(2):337. https://doi.org/10.3390/mi13020337
Chicago/Turabian StyleTang, Xiaoqing, Yuke Li, Xiaoming Liu, Dan Liu, Zhuo Chen, and Tatsuo Arai. 2022. "Vision-Based Automated Control of Magnetic Microrobots" Micromachines 13, no. 2: 337. https://doi.org/10.3390/mi13020337
APA StyleTang, X., Li, Y., Liu, X., Liu, D., Chen, Z., & Arai, T. (2022). Vision-Based Automated Control of Magnetic Microrobots. Micromachines, 13(2), 337. https://doi.org/10.3390/mi13020337