Flexible Tactile Sensor Array for Slippage and Grooved Surface Recognition in Sliding Movement



Abstract
:1. Introduction
2. Design of Tactile Sensor Array and FEM Modeling
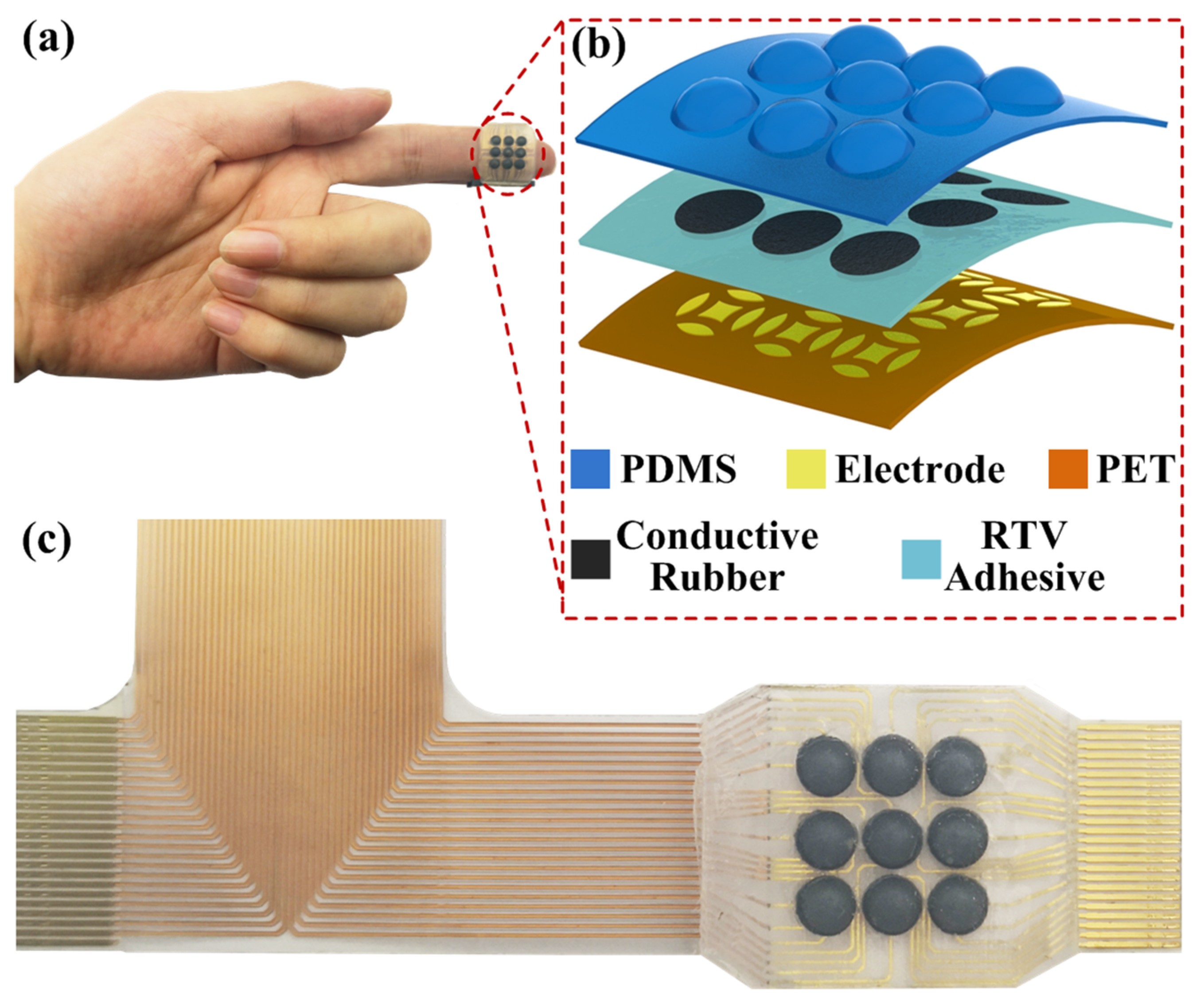
2.1. Flexible Tactile Sensor Array
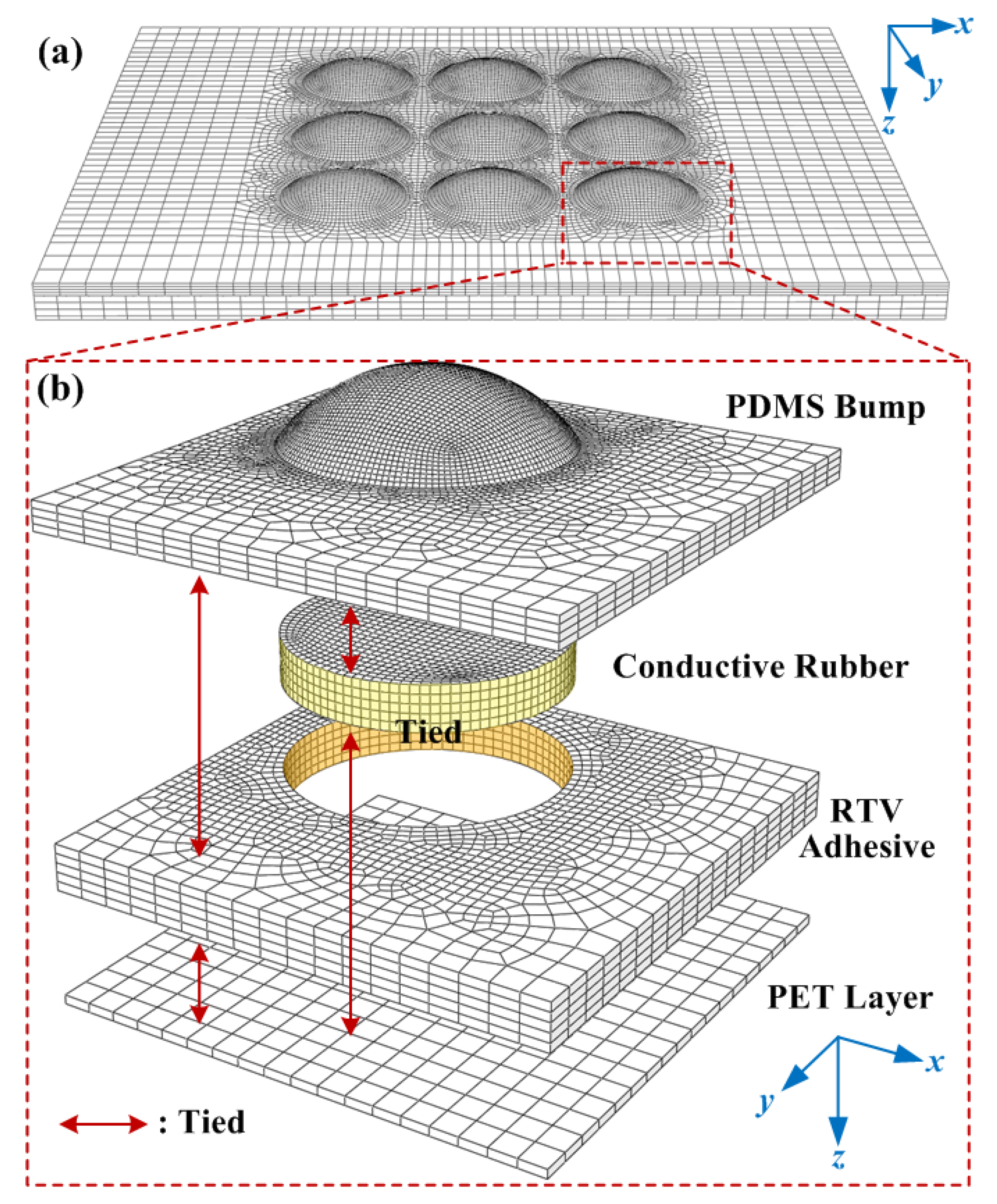
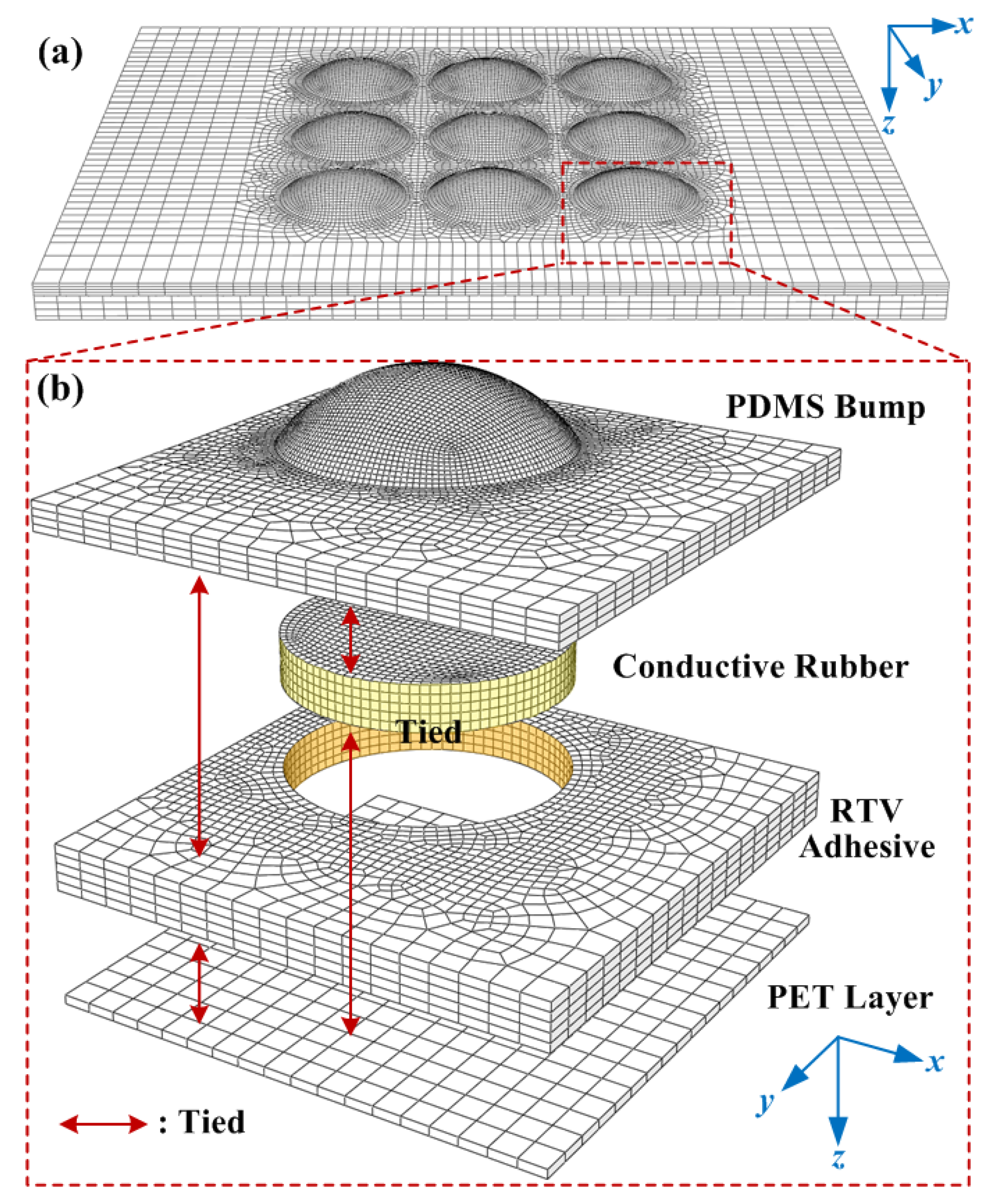
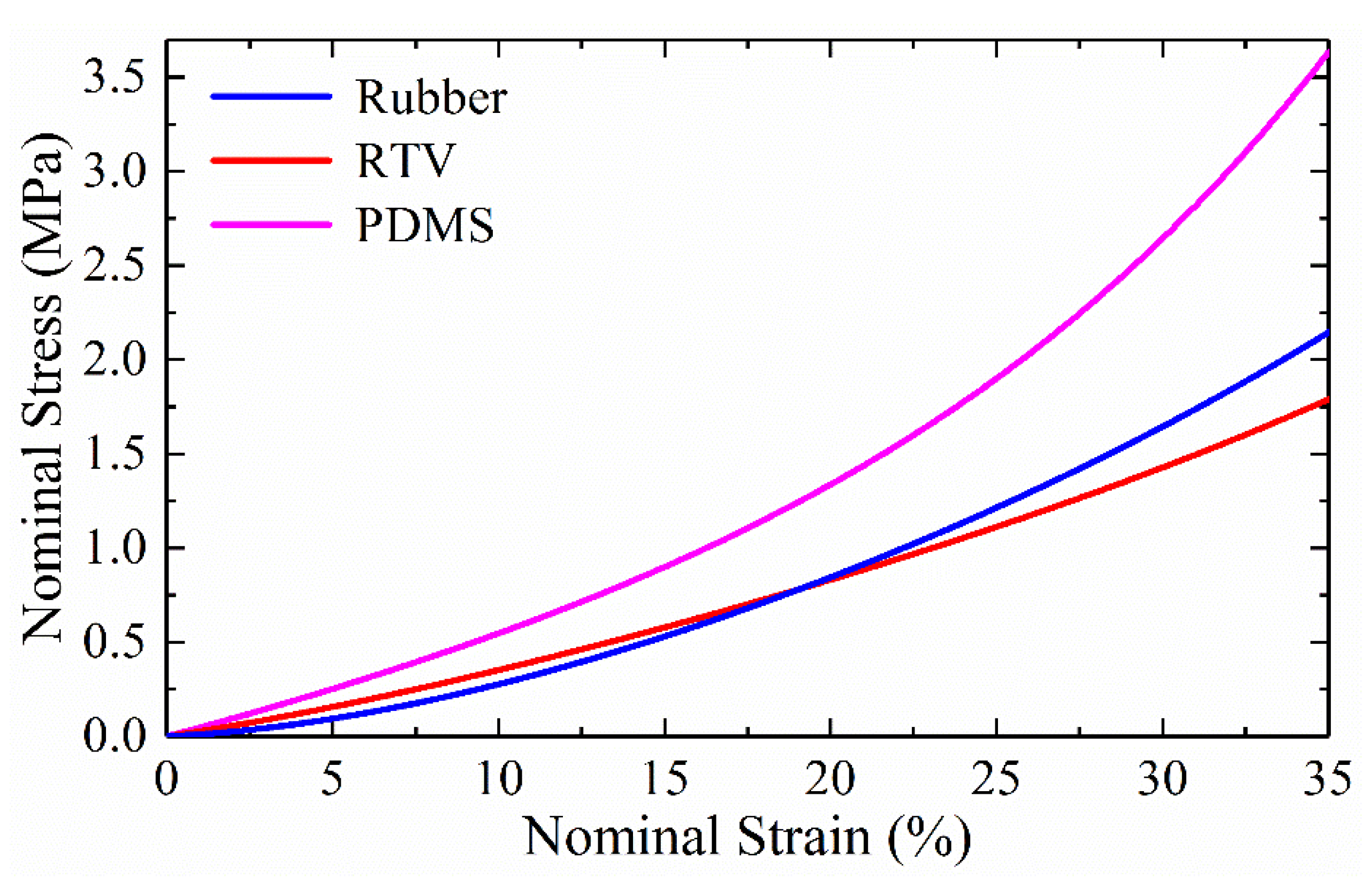
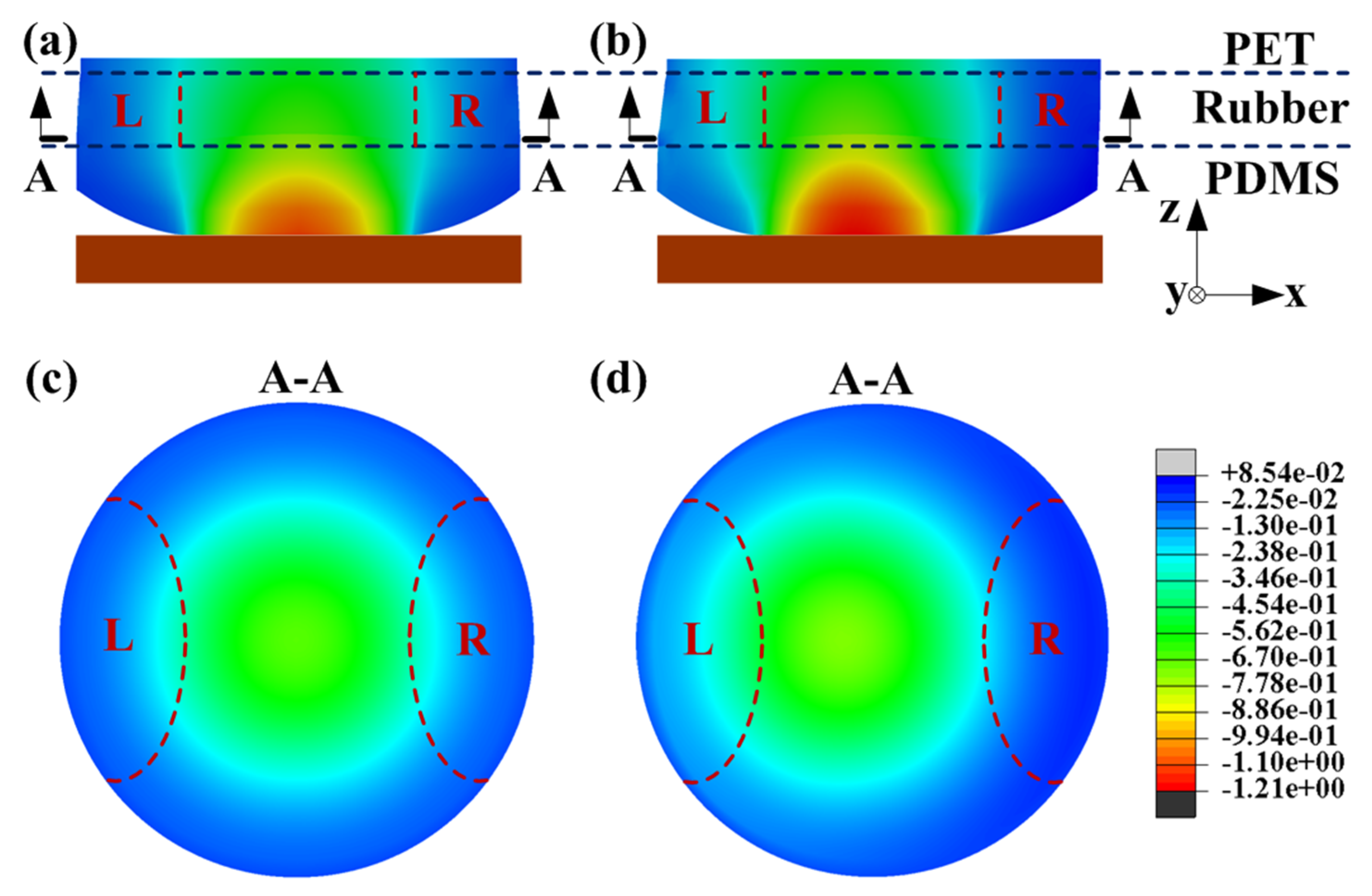
2.2. FEM Modeling
3. Experimental Setup and Procedure
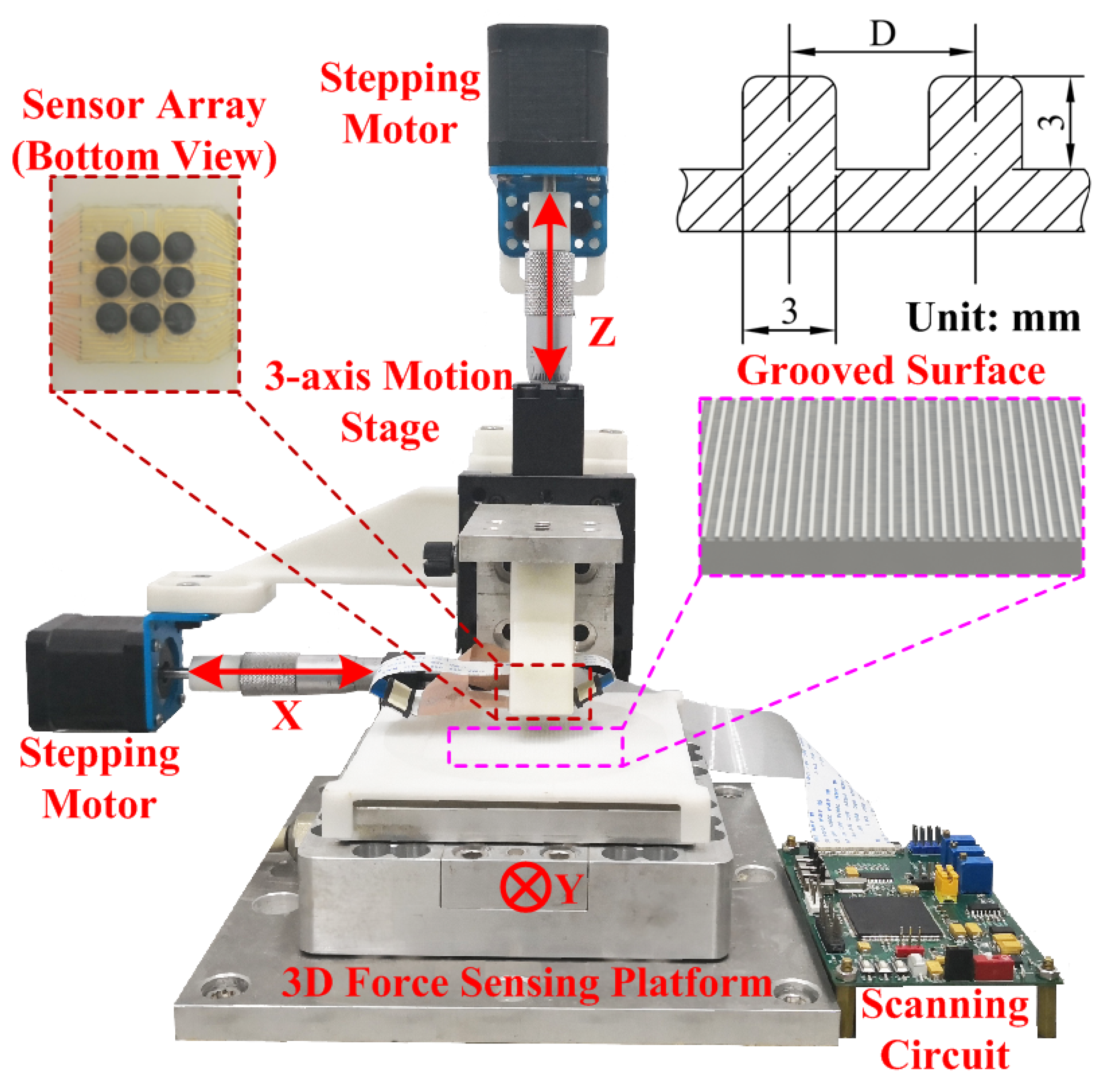
3.1. Experimental Setup
3.2. Experimental Procedure
4. Results and Discussion
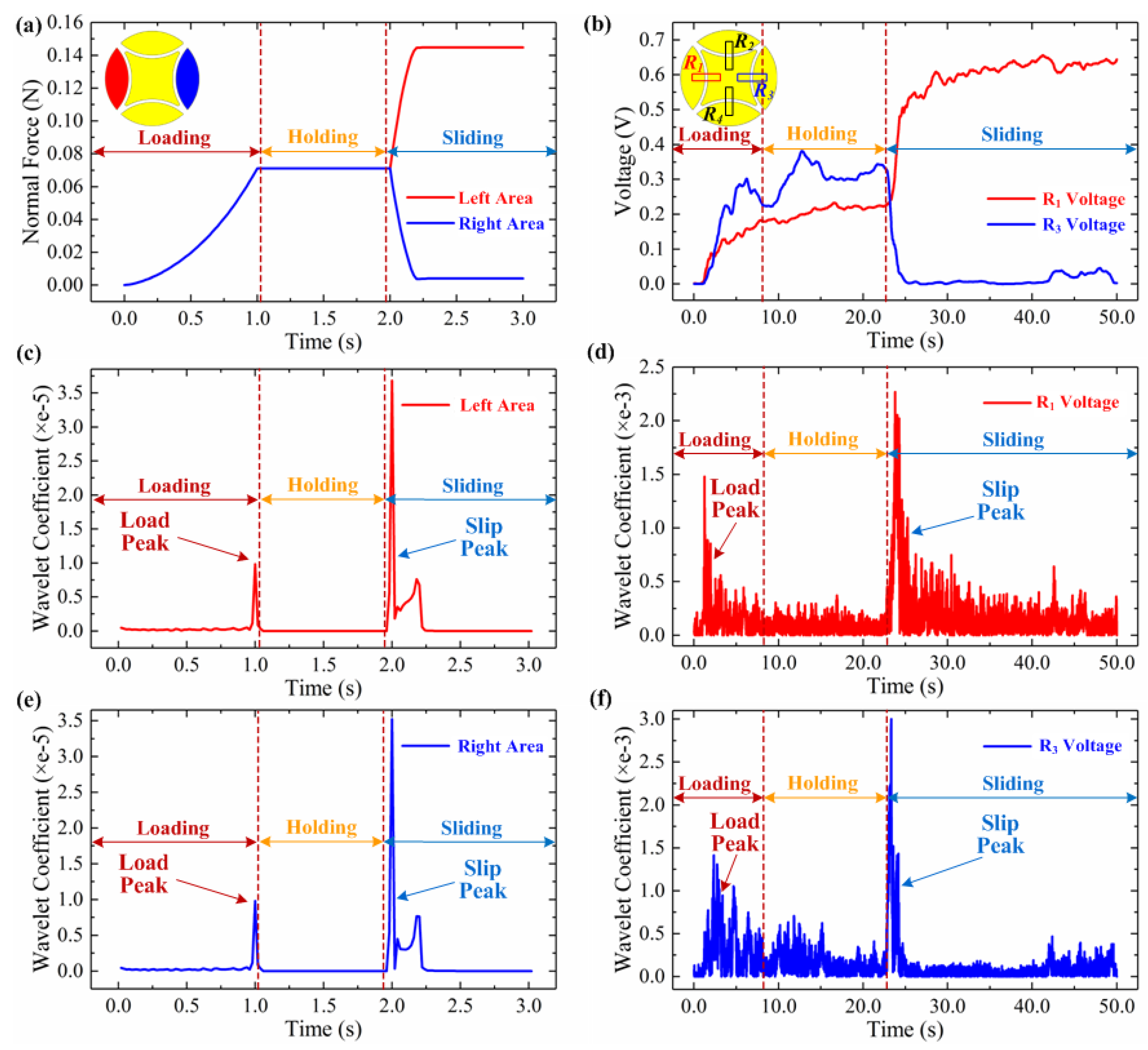
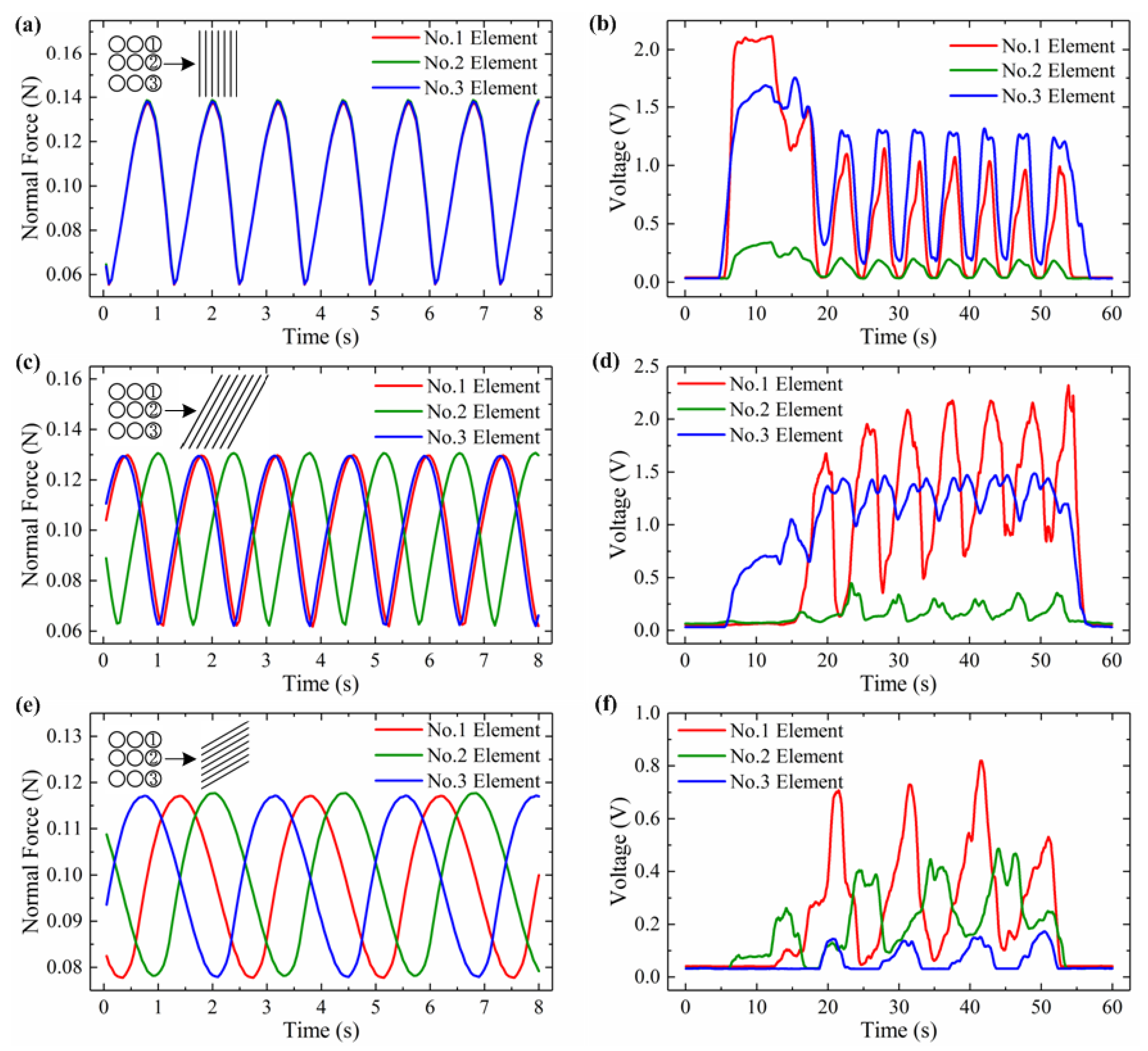
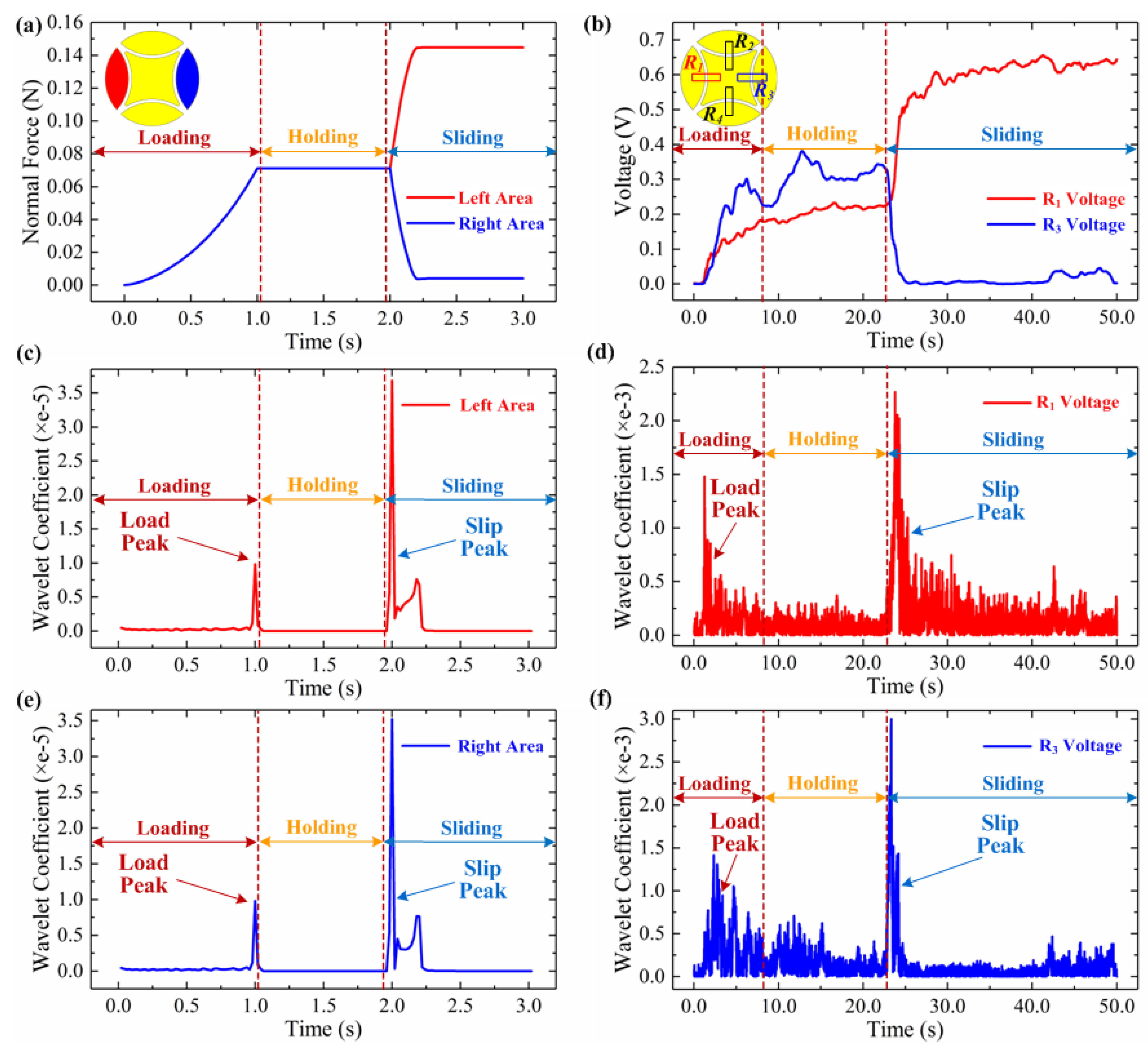
4.1. Slippage Detection in Sliding Movement
4.2. Surface Texture Recognition
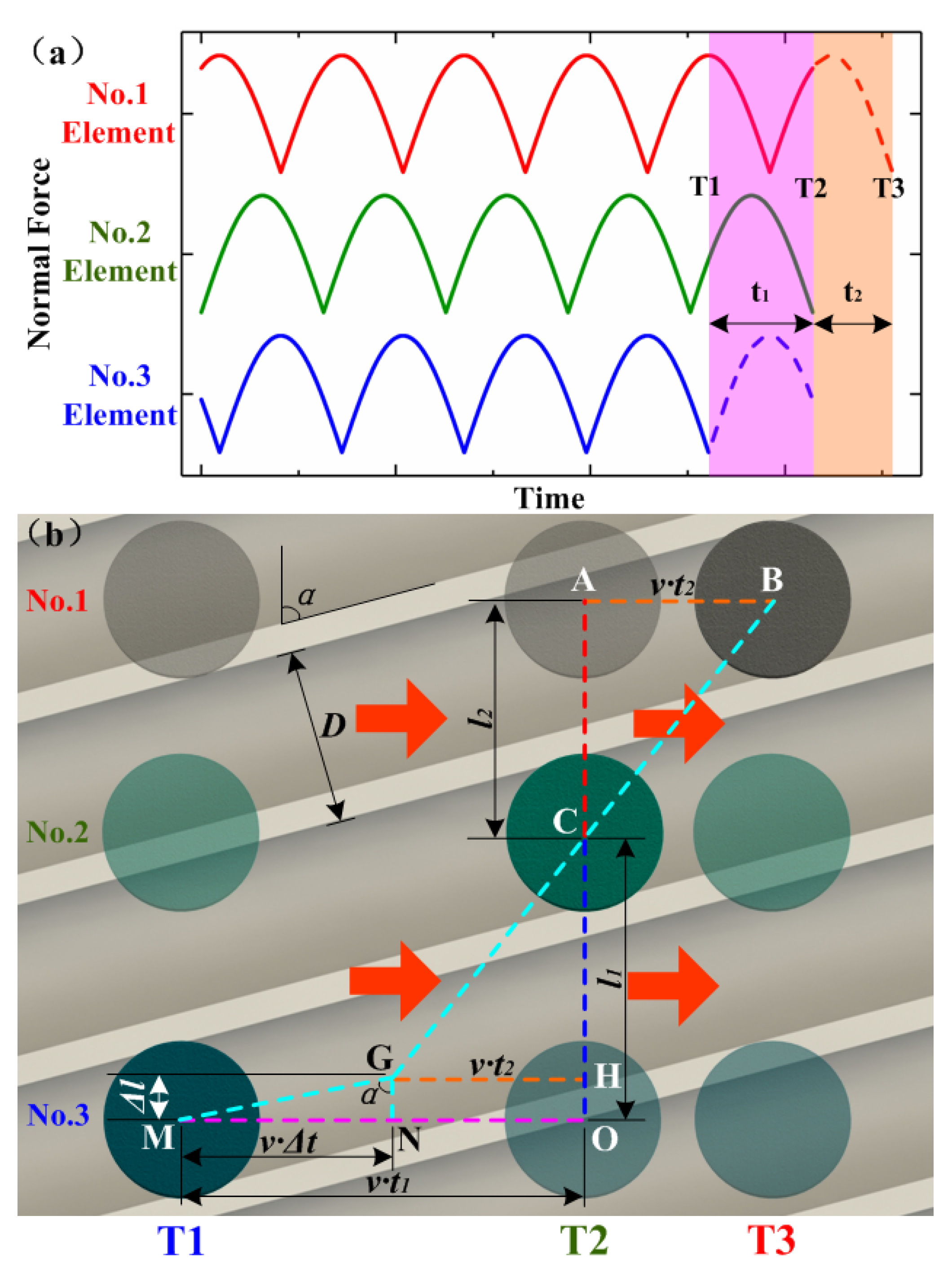
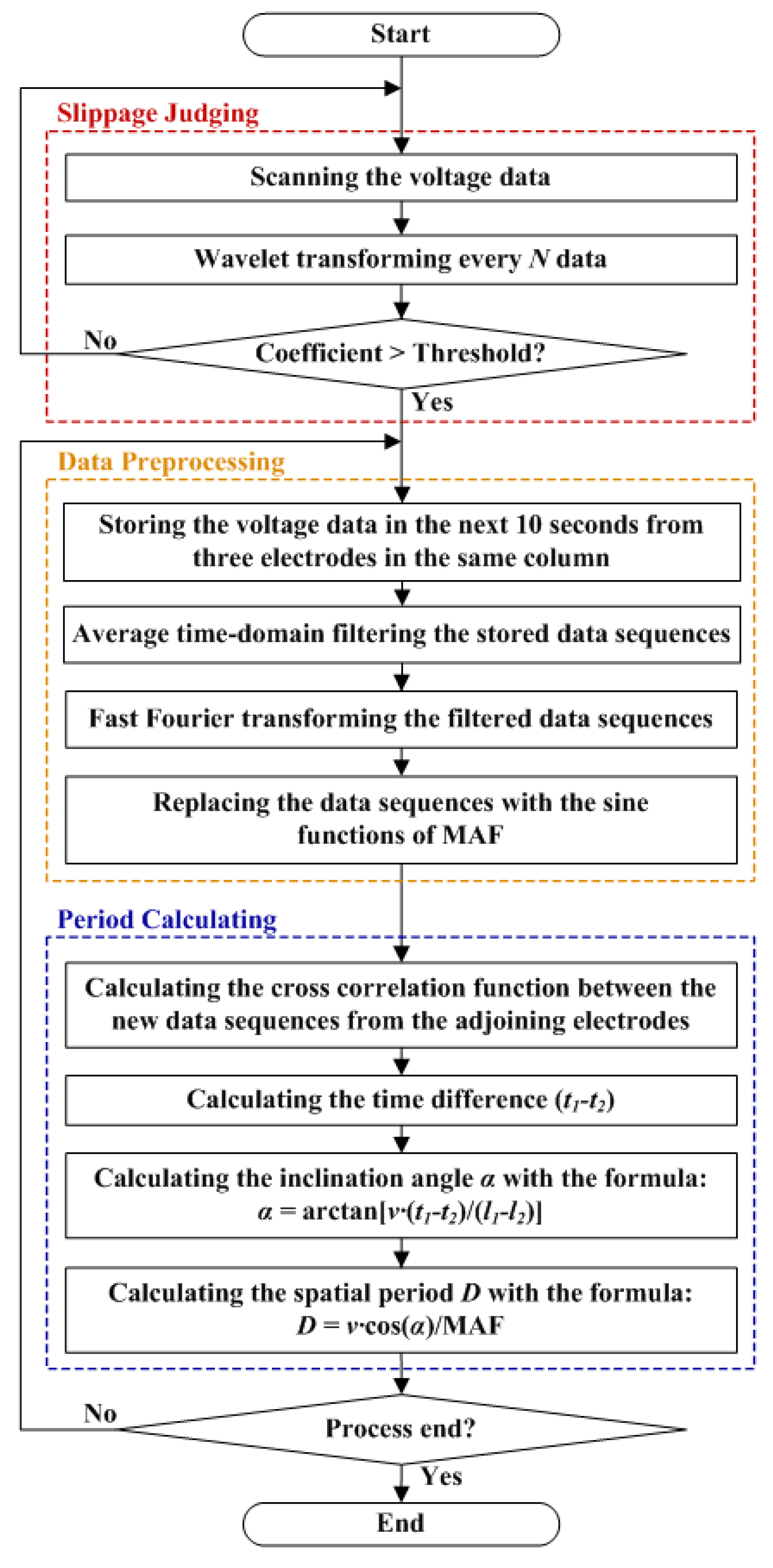
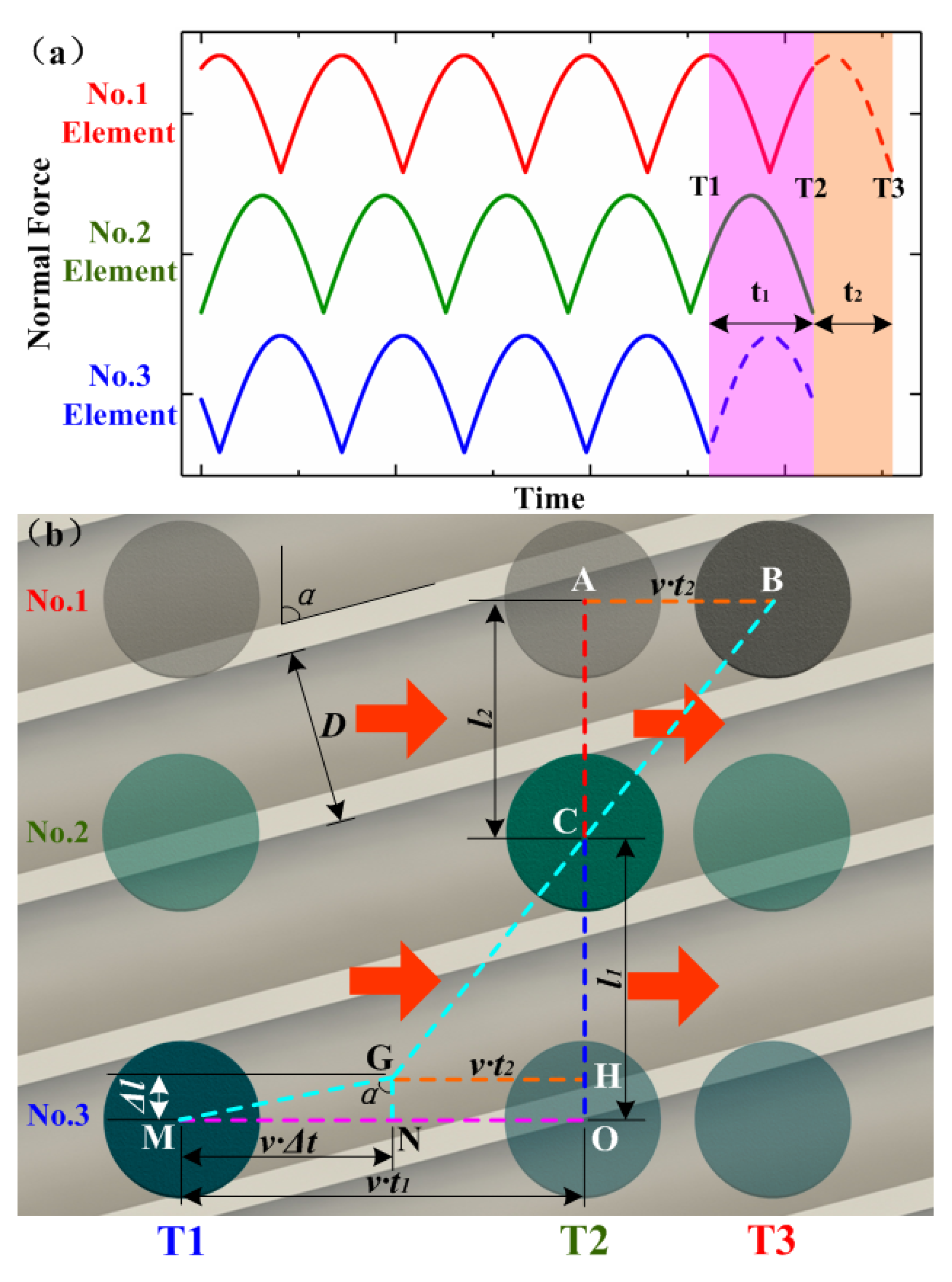
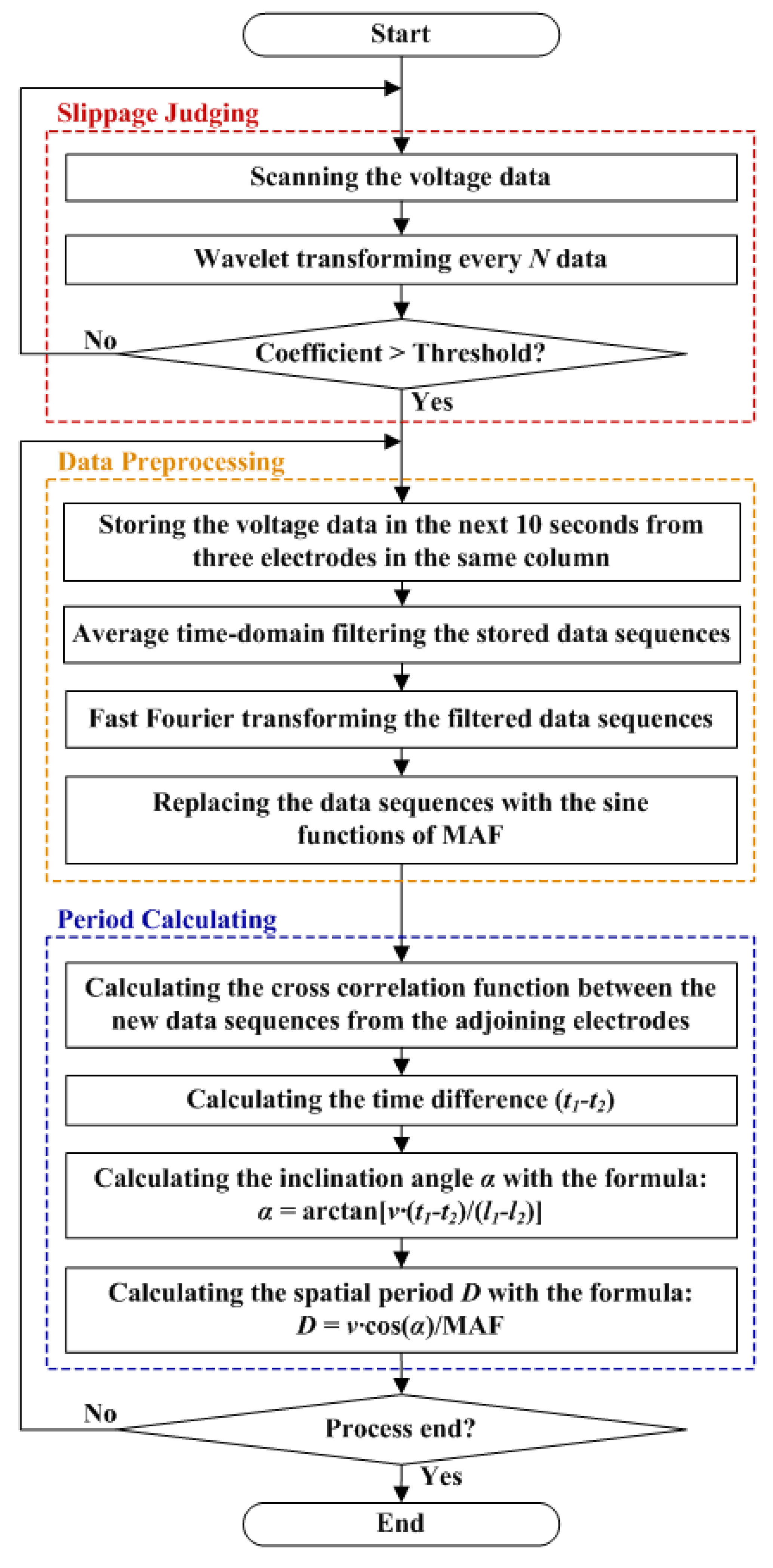
4.2.1. Phase Delay Algorithm for Surface Texture Recognition
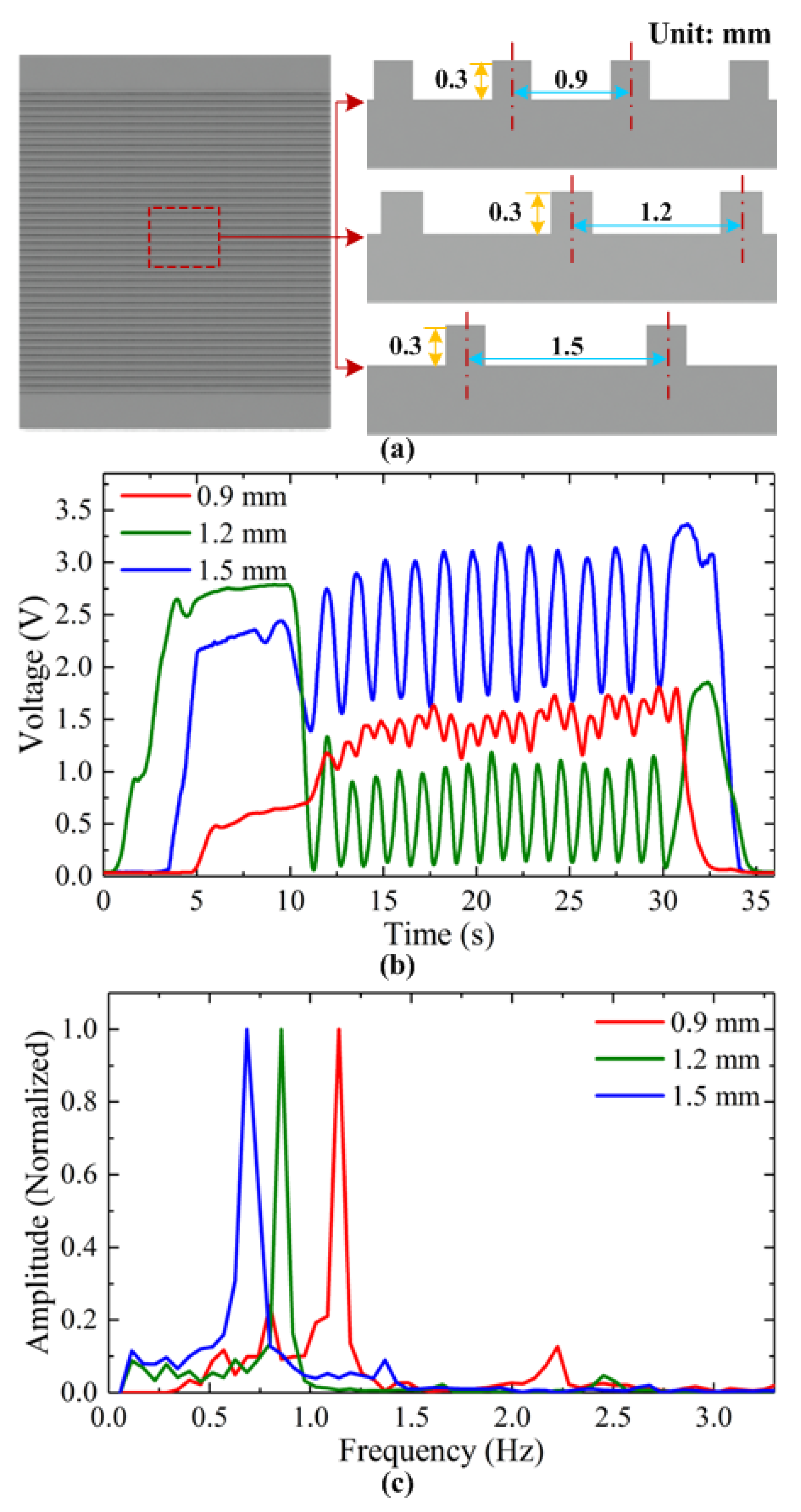
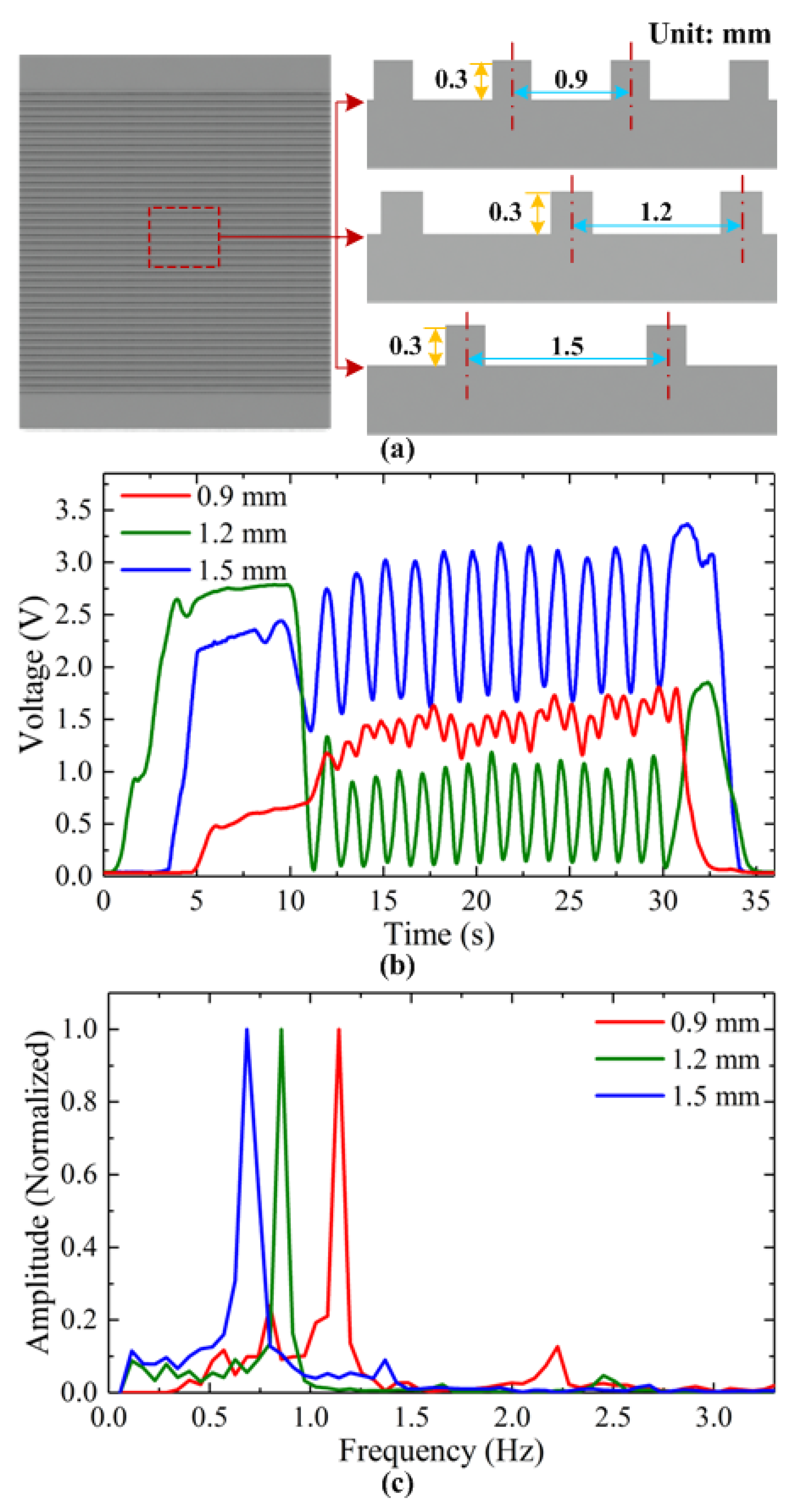
4.2.2. Spatial Period Discrimination
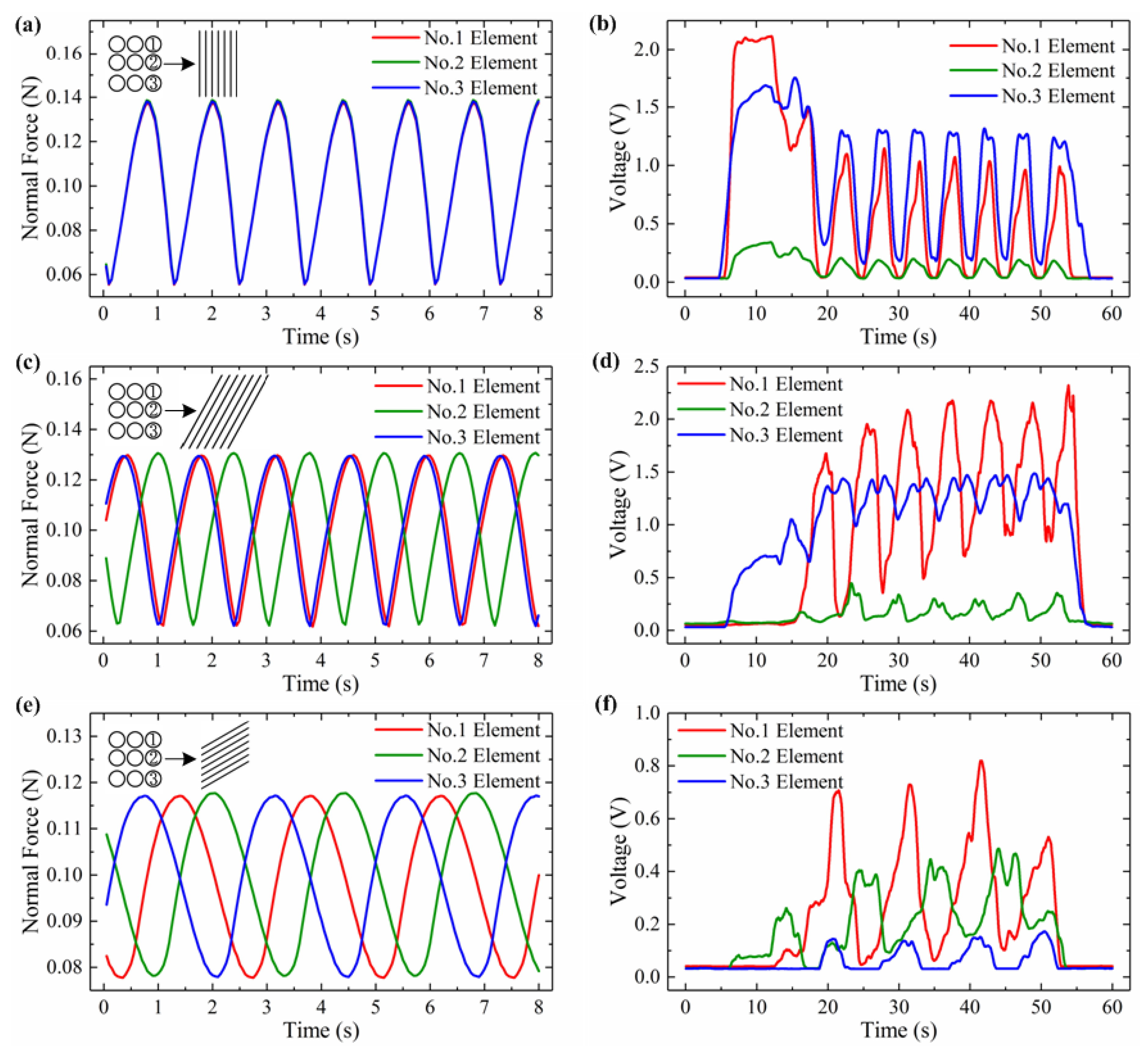
4.2.3. Inclined Angle Calculation in Grooved Surfaces
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dahiya, R.S.; Metta, G.; Valle, M.; Sandini, G. Tactile sensing—from humans to humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar] [CrossRef]
- Chortos, A.; Liu, J.; Bao, Z. Pursuing prosthetic electronic skin. Nat. Mater. 2016, 15, 937–950. [Google Scholar] [CrossRef]
- Damian, D.; Martinez, H.; Dermitzakis, K. Artificial ridged skin for slippage speed detection in prosthetic hand application. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 904–909. [Google Scholar]
- Youref, H.; Boukallel, M.; Althoefer, K. Tactile sensing for dexterous in-hand manipulation in robotics—A review. Sens. Actuator A Phys 2011, 167, 171–187. [Google Scholar]
- Feix, T.; Bullock, I.; Dollar, A. Analysis of Human Grasping Behavior: Object Characteristics and Grasp Type. IEEE Trans. Haptics 2014, 7, 311–323. [Google Scholar] [CrossRef] [PubMed]
- Pritchard, E.; Mahfouz, M.; Iii, B.; Eliza, S.; Haider, M. Flexible capacitive sensors for high resolution pressure measurement. In Proceedings of the 2008 IEEE Sensors, Lecce, Italy, 26–29 October 2008; pp. 1484–1487. [Google Scholar]
- Lee, H.; Chung, J.; Chang, S.; Yoon, E. Real-time measurement of the three-axis contact force distribution using a flexible capacitive polymer tactile sensor. J. Micromech. Microeng. 2011, 21, 35010–35018. [Google Scholar] [CrossRef]
- Khan, S.; Tinku, S.; Lorenzelli, L.; Dahiya, R. Flexible tactile sensors using screen-printed p(vdf-trfe) and mwcnt/pdms composites. IEEE Sens. J. 2015, 15, 3146–3155. [Google Scholar] [CrossRef]
- Cerveri, P.; Quinzi, M.; Bovio, D.; Frigo, C. A Novel Wearable Apparatus to Measure Fingertip Forces in Manipulation Tasks Based on MEMS Barometric Sensors. IEEE Trans. Haptics 2017, 10, 317–324. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Z.; Zhou, T.; Yin, Y.; Cao, R.; Li, C.; Wang, Z. Transparent and flexible triboelectric sensing array for touch security applications. ACS Nano 2017, 11, 8364–8369. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.C.; Xi, K.L.; Mei, D.Q.; Liang, G.H.; Chen, Z.C. A flexible tactile sensor array based on pressure conductive rubber for contact force measurement and slip detection. J. Robot. Mech. 2016, 28, 378–385. [Google Scholar] [CrossRef]
- Wang, Y.C.; Wu, X.; Mei, D.Q.; Zhu, L.F.; Chen, J.N. Flexible tactile sensor array for distributed tactile sensing and slip detection in robotic hand grasping. Sens. Actuator A Phys. 2019, 297, 111512. [Google Scholar] [CrossRef]
- Zhang, Y.; Duan, X.; Zhong, G.; Deng, H. Initial slip detection and its application in biomimetic robotic hands. IEEE Sens. J. 2016, 16, 7073–7080. [Google Scholar] [CrossRef]
- Ho, V.; Hirai, S. Two-dimensional dynamic modeling of a sliding motion of a soft fingertip focusing on stick-to-slip transition. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4315–4321. [Google Scholar]
- Ho, V.; Hirai, S. Three-dimensional modeling and simulation of the sliding motion of a soft fingertip with friction, focusing on stick-slip transition. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5233–5239. [Google Scholar]
- Dao, D.; Toriyama, T.; Wells, J.; Sugiyama, S. Micro force-moment sensor with six-degree of freedom. In Proceedings of the 2001 International Symposium on Micromechatronics and Human Science, Nagoya, Japan, 9–12 September 2001; pp. 93–98. [Google Scholar]
- Youssefian, S.; Rahbar, N.; Torres-Jara, E. Contact behavior of soft spherical tactile sensors. IEEE Sens. J. 2014, 14, 1435–1442. [Google Scholar] [CrossRef]
- Shimojo, M. Mechanical filtering effect of elastic cover for tactile sensor. IEEE Trans. Robot. Autom. 1997, 13, 128–132. [Google Scholar] [CrossRef]
- Ho, V.; Nagatani, T.; Noda, A.; Hirai, S. What can be inferred from a tactile arrayed sensor in autonomous in-hand manipulation? In Proceedings of the 2012 IEEE International Conference on Automation Science and Engineering (CASE), Seoul, Korea, 20–24 August 2012; pp. 461–468. [Google Scholar]
- Ayyildiz, M.; Güçlü, B.; Yildiz, M.; Basdogan, C. An Optoelectromechanical Tactile Sensor for Detection of Breast Lumps. IEEE Trans. Haptics 2013, 6, 145–155. [Google Scholar] [CrossRef] [PubMed]
- Oddo, C.; Beccai, L.; Felder, M.; Giovacchini, F.; Carrozza, M. Artificial roughness encoding with a bio-inspired MEMS-based tactile sensor array. Sensors 2009, 9, 3161–3183. [Google Scholar] [CrossRef] [PubMed]
- Oddo, C.; Controzzi, M.; Beccai, L.; Cipriani, C.; Carrozza, M. Roughness encoding for discrimination of surfaces in artificial active-touch. IEEE Trans. Robot. 2011, 27, 522–533. [Google Scholar] [CrossRef]
- Fishel, J.; Loeb, G. Bayesian exploration for intelligent identification of textures. Front. Neurorobot. 2012, 6, 1–20. [Google Scholar] [CrossRef] [PubMed]
- Liang, G.; Mei, D.; Wang, Y.; Dai, Y.; Chen, Z. A micro-wires based tactile sensor for prosthesis. In Proceedings of the the 6th International Conference on Intelligent Robotics and Applications, Busan, Korea, 25–28 September 2013; pp. 475–483. [Google Scholar]
- Standard Test Methods for Rubber Properties in Compression. ASTM D575–91(2012); ASTM International: West Conshohocken, PA, USA, 2012. [Google Scholar]
- Yeoh, O.H. Some Forms of the Strain Energy Function for Rubber. Rubber Chem. Technol. 1993, 66, 754–771. [Google Scholar] [CrossRef]
- Dogru, S.; Aksoy, B.; Bayraktar, H.; Alaca, B. Poisson’s ratio of PDMS thin films. Polym. Test. 2018, 69, 375–384. [Google Scholar] [CrossRef]
- Teshigawara, S.; Tadakuma, K.; Ming, A.; Ishikawa, M.; Shimojo, M. High sensitivity initial slip sensor for dexterous grasp. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4867–4872. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
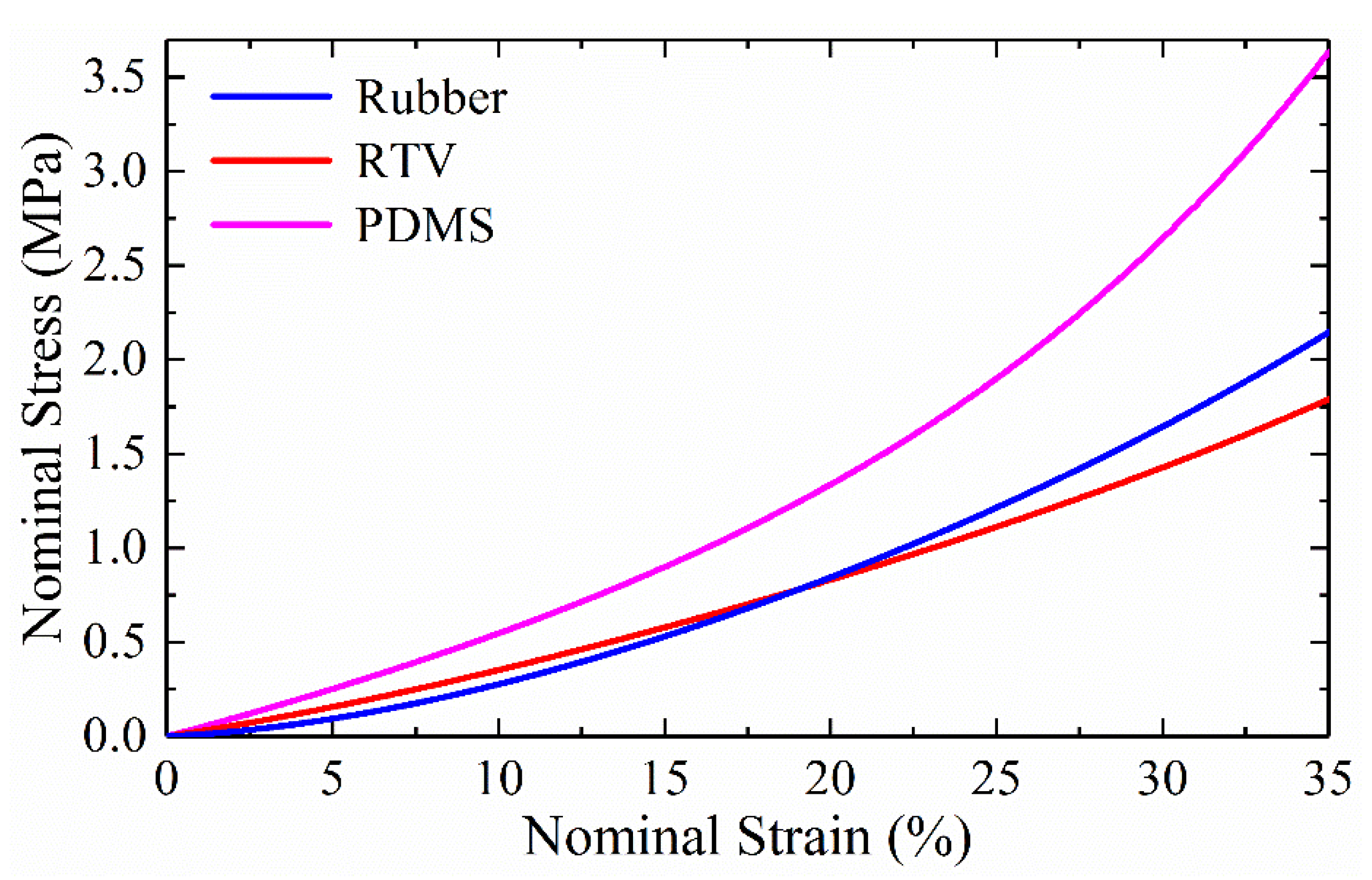
| Material | Yeoh Model | Poisson Ratio | ||
|---|---|---|---|---|
| C1 | C2 | C3 | ||
| Conductive rubber | 0.5686 | 0.0540 | −0.0181 | 0.47 |
| RTV adhesive | 0.5551 | −0.0356 | 0.0027 | 0.48 |
| PDMS | 0.7997 | 0.2881 | −0.0375 | 0.47 [27] |
| Spatial Period Discrimination (angle = 0°) | Inclined Angle Calculation (D = 1.2 mm) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Real D/mm | 0.90 | 1.20 | 1.50 | Real Angle | 0° | 15° | 30° | 45° | 60° | |
| Simulation | MAF | Error (Hz) | 1.11 | 0.0% | 0.78 | 6.0% | 0.67 | 0.0% | α | Error | 0.00° | 0.0% | 11.51° | 23.3% | 29.12° | 2.9% | 44.10° | 2.0% | 62.53° | −4.2% |
| D | Error (mm) | 0.90 | 0.0% | 1.12 | 6.7% | 1.50 | 0.0% | D | Error (mm) | 1.14 | 5.0% | 1.31 | −9.2% | 1.16 | 3.3% | 1.14 | 5.0% | 1.23 | −2.5% | |
| Experiment | MAF | Error (Hz) | 1.06 | 4.5% | 0.83 | 0.0% | 0.67 | 0.0% | α | Error | 0.48° | / | 13.59° | 7.4% | 29.90° | 0.3% | 45.47° | 1.0% | 61.50° | −2.5% |
| D | Error (mm) | 0.95 | −5.6% | 1.20 | 0.0% | 1.50 | 0.0% | D | Error (mm) | 1.25 | −4.2% | 1.22 | −1.7% | 1.30 | −8.3% | 1.31 | −9.2% | 1.19 | 0.8% | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Chen, J.; Mei, D. Flexible Tactile Sensor Array for Slippage and Grooved Surface Recognition in Sliding Movement. Micromachines 2019, 10, 579. https://doi.org/10.3390/mi10090579
Wang Y, Chen J, Mei D. Flexible Tactile Sensor Array for Slippage and Grooved Surface Recognition in Sliding Movement. Micromachines. 2019; 10(9):579. https://doi.org/10.3390/mi10090579
Chicago/Turabian StyleWang, Yancheng, Jianing Chen, and Deqing Mei. 2019. "Flexible Tactile Sensor Array for Slippage and Grooved Surface Recognition in Sliding Movement" Micromachines 10, no. 9: 579. https://doi.org/10.3390/mi10090579
APA StyleWang, Y., Chen, J., & Mei, D. (2019). Flexible Tactile Sensor Array for Slippage and Grooved Surface Recognition in Sliding Movement. Micromachines, 10(9), 579. https://doi.org/10.3390/mi10090579