Non-Cooperative Bistatic SAR Clock Drift Compensation for Tomographic Acquisitions



Abstract
1. Introduction
2. Clock Synchronization Problem
- Reception window synchronization: the reception window of the passive receptor must contain that of the active satellite during the whole acquisition, in order to avoid missing pulses.
- Phase synchronization: throughout an acquisition, the clock fluctuations between different onboard clocks must be bounded in order to allow proper focusing of the passive receiver image and avoid coherence loss between bistatic images.
Clock Stability
3. Phase Compensation Method
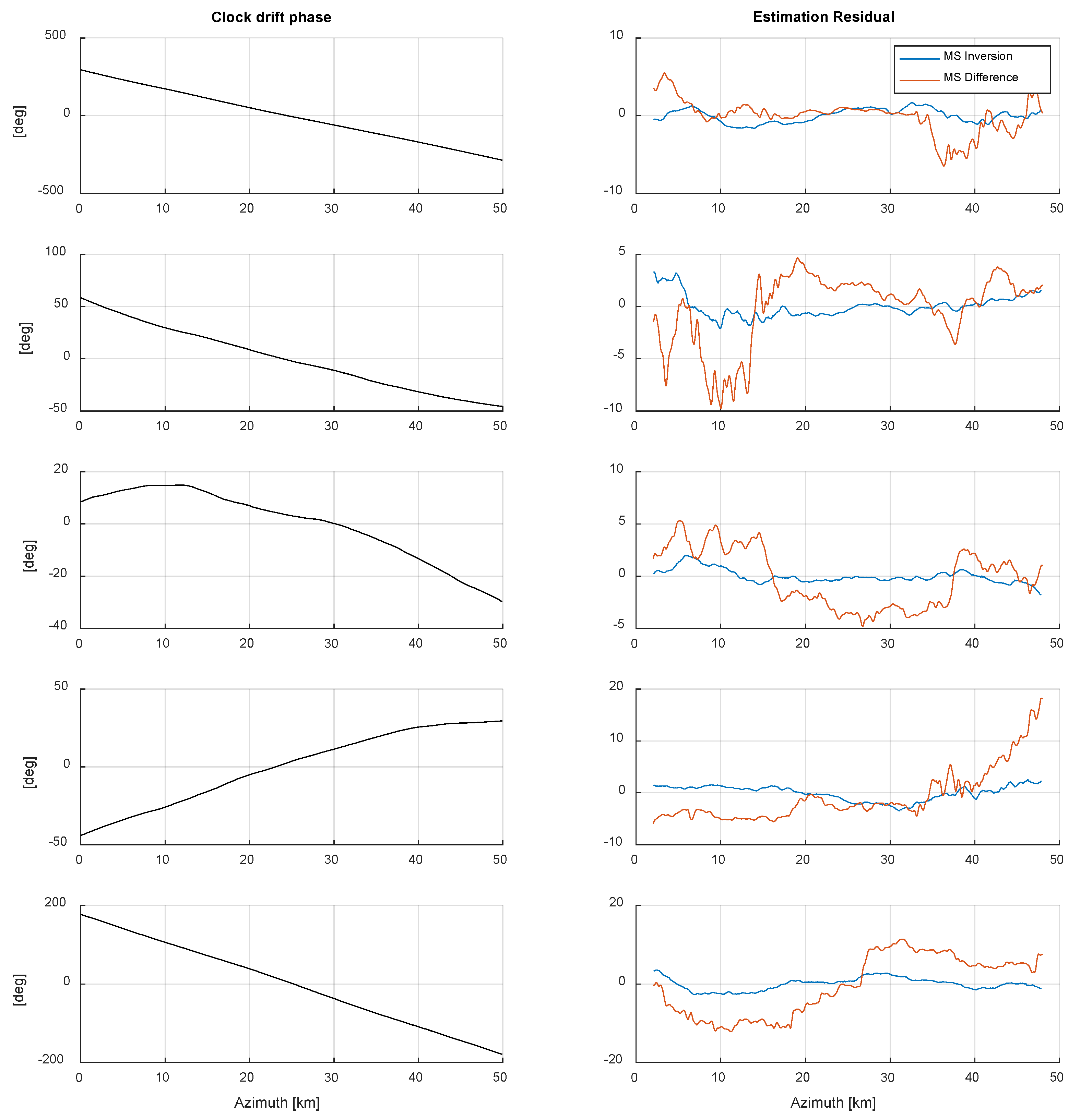
- MultiSquint phase difference (MS Difference);
- MultiSquint Linear system inversion (MS Inversion).
- if samples the system phase at time (i.e., ) or zero otherwise;
- if samples the topographic phase at time (i.e., ) or zero otherwise.
4. Synthetic Images Simulations
Simulation Parameters
5. Simulation Results
6. Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Reigber, A.; Moreira, A. First demonstration of airborne SAR tomography using multibaseline L-band data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2142–2151. [Google Scholar] [CrossRef]
- Tebaldini, S. Single and multipolarimetric SAR tomography of forested areas: A parametric approach. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2375–2387. [Google Scholar] [CrossRef]
- Ho Tong Minh, D.; Toan, T.L.; Rocca, F.; Tebaldini, S.; d’Alessandro, M.M.; Villard, L. Relating P-Band Synthetic Aperture Radar Tomography to Tropical Forest Biomass. IEEE Trans. Geosci. Remote Sens. 2014, 52, 967–979. [Google Scholar] [CrossRef]
- Moreira, A.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P.; Younis, M.; Lopez-Dekker, P.; Huber, S.; Villano, M.; Pardini, M.; Eineder, M.; et al. Tandem-L: A highly innovative bistatic SAR mission for global observation of dynamic processes on the Earth’s surface. IEEE Geosci. Remote Sens. Mag. 2015, 3, 8–23. [Google Scholar] [CrossRef]
- European Space Agency. SAOCOM Companion Mission Science Document; European Space Agency: Noordwijk, The Netherlands, 2014. [Google Scholar]
- Krieger, G.; Moreira, A. Multistatic SAR Satellite Formations: Potentials and Challenges. Proc. IGARSS 2005, 4, 2680–2684. [Google Scholar]
- Krieger, G.; Hajnsek, I.; Papathanassiou, K.P.; Younis, M.; Moreira, A. Interferometric Synthetic Aperture Radar (SAR) Missions Employing Formation Flying. Proc. IEEE 2010, 98, 816–843. [Google Scholar] [CrossRef]
- Breit, H.; Younis, M.; Balss, A.; Grigorov, C.; Hueso-Gonzalez, J.; Krieger, G. Bistatic Synchronisation and Processing of TanDEM-X Data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011; pp. 2424–2427. [Google Scholar]
- Weigt, M.; Grigorov, C.; Steinbrecher, U.; Schulze, D. TanDEM-X Mission: Long Term in Orbit Synchronisation Link Performance Analysis. In Proceedings of the IEEE 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014; pp. 1–4. [Google Scholar]
- Rodriguez-Cassola, M.; Prats-Iraola, P.; Nannini, M.; Lopez-Dekker, P.; Moreira, A.; Carnicero Dominguez, B. Calibration Concept for Weakly-Synchronised SAR Companion Missions: ESA’s SAOCOM/CS case. In Proceedings of the EUSAR 2016: 11th European Conference on Synthetic Aperture Radar, Hamburg, Germany, 6–9 June 2016; pp. 1–4. [Google Scholar]
- Rodriguez-Cassola, M.; Prats-Iraola, P.; Lopez-Dekker, P.; Reigber, A.; Krieger, G.; Moreira, A. Autonomous time and phase calibration of spaceborne bistatic SAR systems. In Proceedings of the EUSAR 2014: 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014. [Google Scholar]
- Rodriguez-Cassola, M.; Prats-Iraola, P.; Nannini, M.; López-Dekker, P.; Moreira, A.; Carnicero-Dominguez, B. Dedicated calibration concept for interferometric SAR companion missions. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 1416–1419. [Google Scholar]
- Krieger, G.; Younis, M. Impact of oscillator noise in bistatic and multistatic SAR. IEEE Geosci. Remote Sens. Lett. 2006, 3, 424–428. [Google Scholar] [CrossRef]
- Allan, D.W. The Statistics of Atomic Frequency Standards. Proc. IEEE 1966, 54, 221–230. [Google Scholar] [CrossRef]
- Candelier, V.; Canzian, P.; Lamboley, J.; Brunet, M.; Santarelli, G. Space qualified 5 MHz ultra stable oscillators. In Proceedings of the IEEE International Frequency Control Symposium and PDA Exhibition Jointly with the 17th European Frequency and Time Forum, Tampa, FL, USA, 4–8 May 2003; pp. 575–582. [Google Scholar]
- Gomba, G.; Parizzi, A.; De Zan, F.; Eineder, M.; Bamler, R. Toward Operational Compensation of Ionospheric Effects in SAR Interferograms: The Split-Spectrum Method. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1446–1461. [Google Scholar] [CrossRef]
- Prats, P.; Mallorqui, J. Estimation of azimuth phase undulations with multisquint processing in airborne interferometric SAR images. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1530–1533. [Google Scholar] [CrossRef]
- Mancon, S.; Monti Guarnieri, A.; Giudici, D.; Tebaldini, S. On the Phase Calibration by Multisquint Analysis in TOPSAR and Stripmap Interferometry. IEEE Trans. Geosci. Remote Sens. 2017, 55, 134–147. [Google Scholar] [CrossRef]
- Gomba, G.; De Zan, F.; Parizzi, A. Ionospheric Phase Screen and Ionospheric Azimuth Shift Estimation Combining the Split-Spectrum and Multi-Squint Methods. In Proceedings of the EUSAR 2016: 11th European Conference on Synthetic Aperture Radar, Hamburg, Germany, 6–9 June 2016; pp. 1–4. [Google Scholar]
- Gilbert, J.R.; Moler, C.; Schreiber, R. Sparse Matrices in MATLAB: Design and Implementation. SIAM J. Matrix Anal. Appl. 1992, 13, 333–356. [Google Scholar] [CrossRef]
- Li, D.; Rodriguez-Cassola, M.; Prats-Iraola, P.; López-Dekker, P.; Wu, M.; Detlefsen, J.; Moreira, A. Exact reverse backprojection for SAR raw data generation of natural scenes. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 3258–3261. [Google Scholar]
- Bauck, J.L.; Jenkins, W.K. Convolution-backprojection image reconstruction for bistatic synthetic aperture radar. In Proceedings of the IEEE International Symposium on Circuits and Systems, Portland, OR, USA, 8–11 May 1989; Volume 3, pp. 1512–1515. [Google Scholar]
- Frey, O.; Magnard, C.; Ruegg, M.; Meier, E. Focusing of Airborne Synthetic Aperture Radar Data from Highly Nonlinear Flight Tracks. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1844–1858. [Google Scholar] [CrossRef]
- Papathanassiou, K.P.; Cloude, S.R. Single baseline polarimetric SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2011, 39, 2352–2363. [Google Scholar] [CrossRef]
- Tebaldini, S.; Rocca, F. Multibaseline Polarimetric SAR Tomography of a Boreal Forest at P- and L-Bands. IEEE Trans. Geosci. Remote Sens. 2012, 50, 232–246. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Pixel spacing | 10 m |
| Multisquint span 1 | −6 km to 4 km |
| Multisquint step 1 | 200 m |
| Number of looks | 21 × 21 |
| Reference orbits | Nominal |
| Pependicular baselines | 700 m–3500 m |
| Along-track baseline | 6000 m |
| Central look angle | 20 deg |
| Antenna length SAOCOM | 9.97 m |
| Antenna length CS | 2.92 m |
| SAR central frequency | 1275 MHz |
| STALO (@t = 1 s) 2 | 1E-11 |
| Parameter | Value |
|---|---|
| Number of acquisitions | 5 |
| Tomo vertical resolution | 15.3 m |
| Tomo height of ambiguity | 76.4 m |
| Number of canopy layers | 2 |
| Ground to Volume Ratio | −3 dB |
| Canopy layers height | 20 m/30 m |
| Coherence between acquisitions | Null |
| Topography error (1) | 10 m |
| Image | MS Difference | MS Inversion |
|---|---|---|
| 1 | 3.2 ± 0.6 | 0.9 ± 0.2 |
| 2 | 4.2 ± 1.1 | 1.1 ± 0.2 |
| 3 | 2.6 ± 0.9 | 0.8 ± 0.1 |
| 4 | 4.2 ± 1.8 | 1.2 ± 0.2 |
| 5 | 4.0 ± 1.6 | 1.2 ± 0.3 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azcueta, M.; Tebaldini, S. Non-Cooperative Bistatic SAR Clock Drift Compensation for Tomographic Acquisitions. Remote Sens. 2017, 9, 1087. https://doi.org/10.3390/rs9111087
Azcueta M, Tebaldini S. Non-Cooperative Bistatic SAR Clock Drift Compensation for Tomographic Acquisitions. Remote Sensing. 2017; 9(11):1087. https://doi.org/10.3390/rs9111087
Chicago/Turabian StyleAzcueta, Mario, and Stefano Tebaldini. 2017. "Non-Cooperative Bistatic SAR Clock Drift Compensation for Tomographic Acquisitions" Remote Sensing 9, no. 11: 1087. https://doi.org/10.3390/rs9111087
APA StyleAzcueta, M., & Tebaldini, S. (2017). Non-Cooperative Bistatic SAR Clock Drift Compensation for Tomographic Acquisitions. Remote Sensing, 9(11), 1087. https://doi.org/10.3390/rs9111087