
A Machine Learning Algorithm Using Texture Features for Nighttime Cloud Detection from FY-3D MERSI L1 Imagery


Abstract
1. Introduction
- Development of an operational nighttime cloud detection algorithm framework for FY-3D MERSI based on LGBM, which is more robust than current operational methods.
- Integration of spatial texture to enhance model robustness under various conditions and to mitigate the effects of thermal stripes inherent in MERSI Level 1 imagery.
- Introduction of a comprehensive multi-aspect assessment framework that addresses the complexities and challenges associated with nighttime cloud detection across different algorithms.
2. Materials and Methods
2.1. Data
2.1.1. FY-3D MERSI-II Products
2.1.2. CALIPSO
2.1.3. Collocated Dataset for Training and Testing
2.2. Methodology
2.2.1. LGBM
2.2.2. Calculation of GLCM Features
2.2.3. Baseline Model
2.2.4. Validation Strategies and Performance Evaluation
- where TP, TN, FP, and FN are the numbers of correctly predicted cloud pixels, correctly predicted clear pixels, wrongly predicted cloud pixels, and wrongly predicted clear pixels, respectively.
3. Results
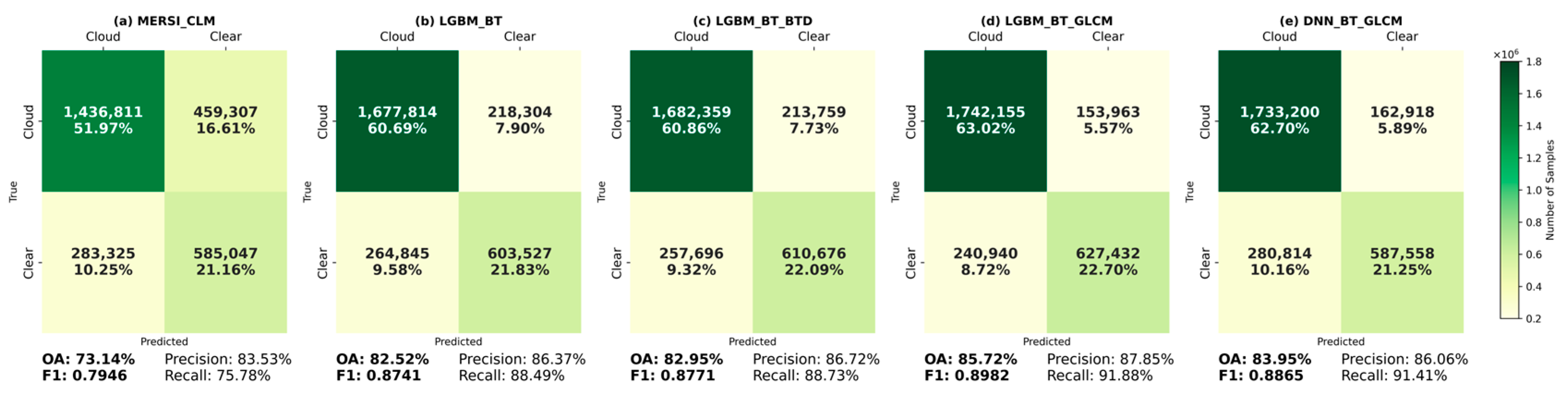
3.1. Overall Statistical Assessments
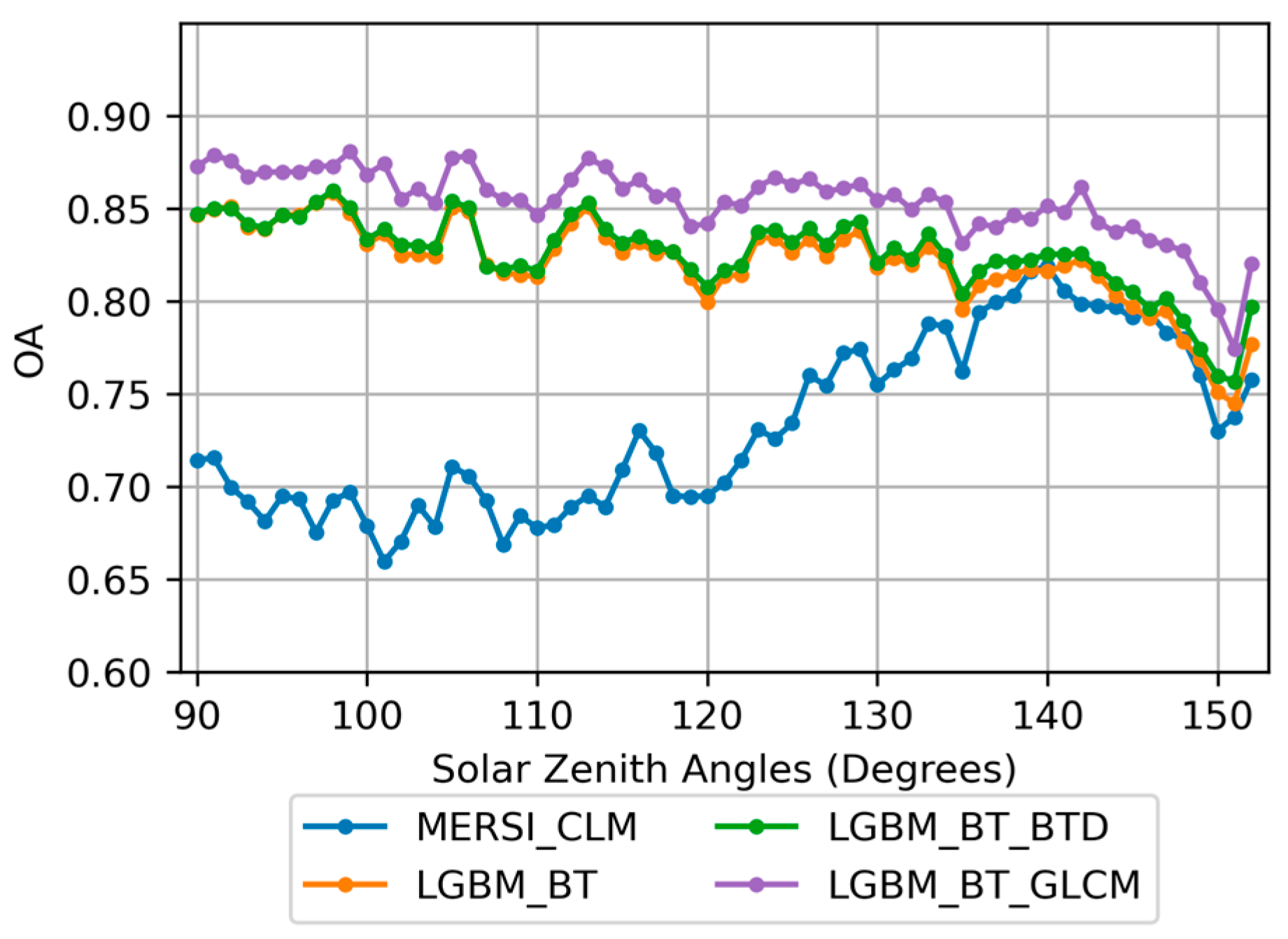
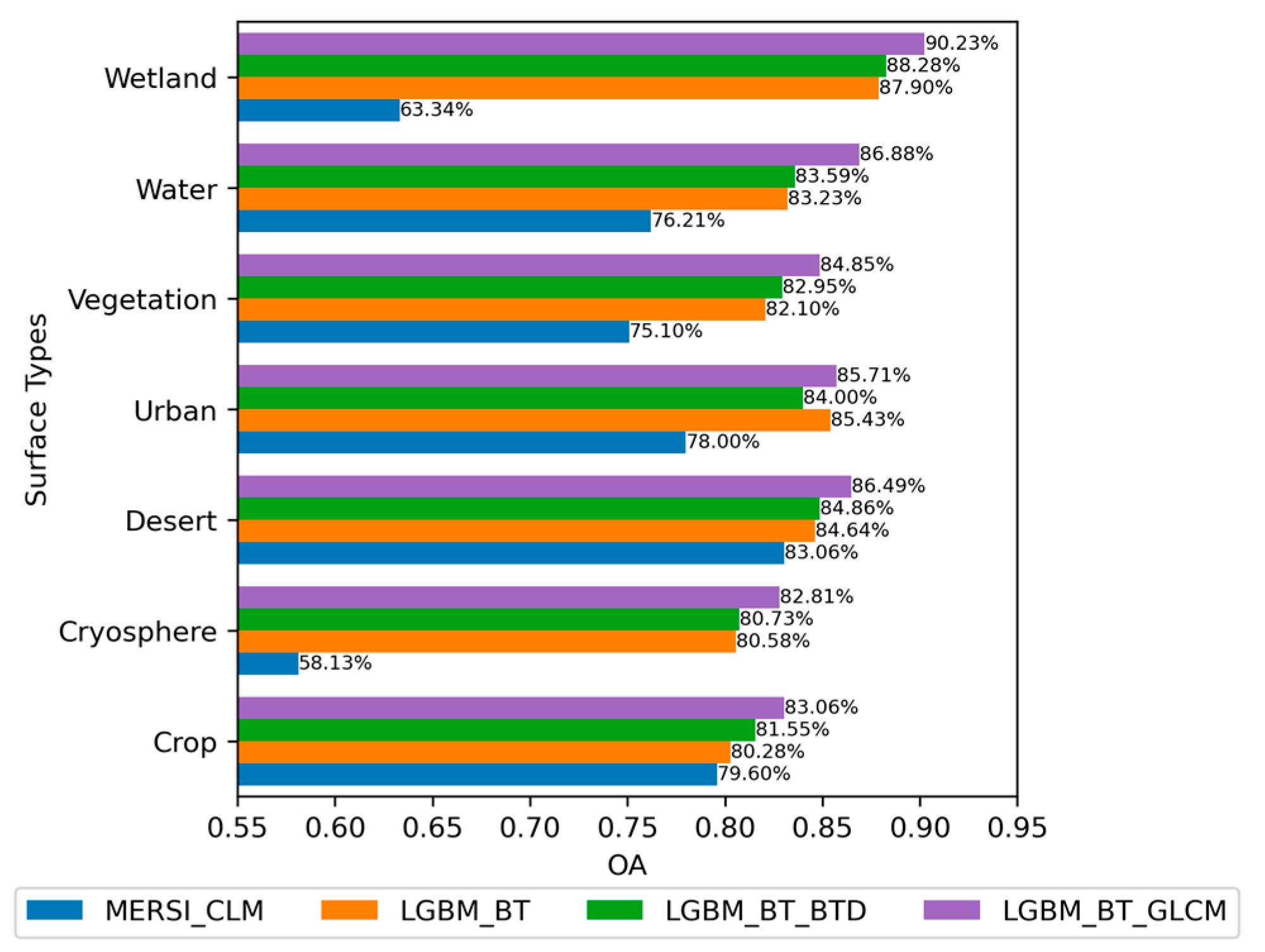
3.2. Cloud Detection Evaluations by Solar Zenith Angles and Surface Types
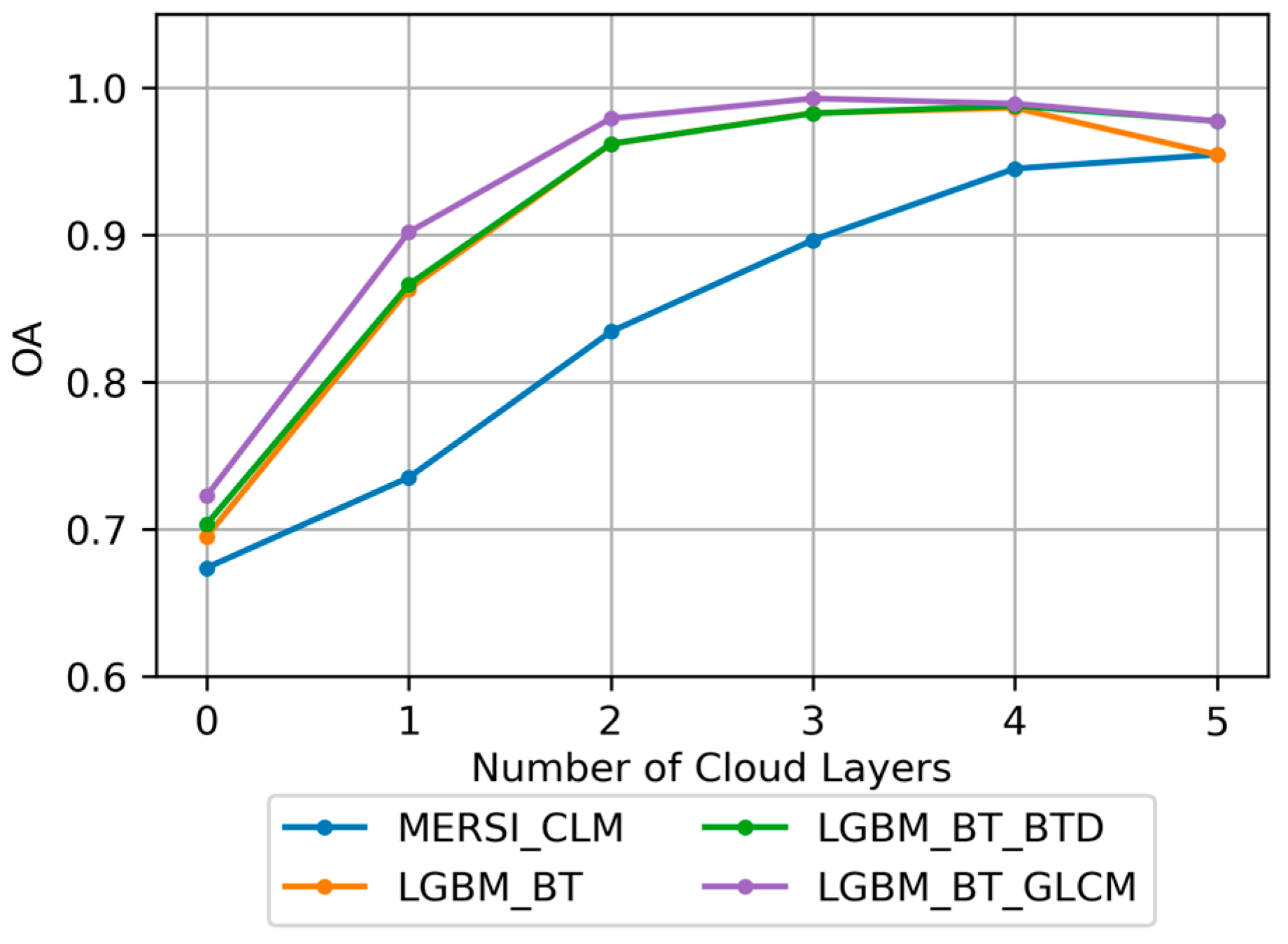
3.3. Performance of Cloud Detection with Cloud Properties
3.4. Detection Capability Under Different BT Ranges
3.5. Visual Inspection Comparison
3.6. Comparison to MODIS Cloud Mask Product
4. Discussion
4.1. Cloud Detection Enhancements by Applying the Proposed Methodology
4.2. Variable Importance
4.3. Practice of GLCM Parameters
4.4. Limitations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| LGBM | Light Gradient-Boosting Machine |
| IR | Infrared |
| GLCM | Grey level co-occurrence matrix |
| FY | Fengyun |
| MERSI | Medium Resolution Spectral Imager |
| OA | Overall accuracy |
| ML | Machine learning |
| DL | Deep learning |
| CALIPSO | Cloud-Aerosol Lidar and Infrared Pathfinder Satellite Observation |
| CALIOP | Cloud-Aerosol Lidar with Orthogonal Polarization |
| IFOV | Instantaneous field of view |
| CLM | Cloud mask |
| IGBP | International Geosphere–Biosphere Programme |
| MODIS | Moderate Resolution Imaging Spectroradiometer |
References
- Stephens, G.L. Cloud Feedbacks in the Climate System: A Critical Review. J. Clim. 2005, 18, 237–273. [Google Scholar] [CrossRef]
- Baker, M.B.; Peter, T. Small-scale cloud processes and climate. Nature 2008, 451, 299–300. [Google Scholar] [CrossRef] [PubMed]
- Bengtsson, L. The global atmospheric water cycle. Environ. Res. Lett. 2010, 5, 2. [Google Scholar] [CrossRef]
- Fernández-Prieto, D.; van Oevelen, P.; Su, Z.; Wagner, W. Editorial “Advances in Earth observation for water cycle science”. Hydrol. Earth Syst. Sci. 2012, 16, 543–549. [Google Scholar] [CrossRef]
- Huang, J.; Lin, C.; Li, Y.; Huang, B. Effects of humidity, aerosol, and cloud on subambient radiative cooling. Int. J. Heat Mass Transf. 2022, 186, 122438. [Google Scholar] [CrossRef]
- King, M.D.; Platnick, S.; Menzel, W.P.; Ackerman, S.A.; Hubanks, P.A. Spatial and Temporal Distribution of Clouds Observed by MODIS Onboard the Terra and Aqua Satellites. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3826–3852. [Google Scholar] [CrossRef]
- Stubenrauch, C.J.; Rossow, W.B.; Kinne, S.; Ackerman, S.; Cesana, G.; Chepfer, H.; Di Girolamo, L.; Getzewich, B.; Guignard, A.; Heidinger, A.; et al. Assessment of Global Cloud Datasets from Satellites: Project and Database Initiated by the GEWEX Radiation Panel. Bull. Am. Meteorol. Soc. 2013, 94, 1031–1049. [Google Scholar] [CrossRef]
- Zhang, B.; Guo, Z.; Zhang, L.; Zhou, T.; Hayasaka, T. Cloud Characteristics and Radiation Forcing in the Global Land Monsoon Region From Multisource Satellite Data Sets. Earth Space Sci. 2020, 7, e2019EA001027. [Google Scholar] [CrossRef]
- Ackerman, S.A.; Strabala, K.I.; Menzel, W.P.; Frey, R.A.; Moeller, C.C.; Gumley, L.E. Discriminating clear sky from clouds with MODIS. J. Geophys. Res. Atmos. 1998, 103, 32141–32157. [Google Scholar] [CrossRef]
- Frey, R.A.; Ackerman, S.A.; Liu, Y.; Strabala, K.I.; Zhang, H.; Key, J.R.; Wang, X. Cloud Detection with MODIS. Part I: Improvements in the MODIS Cloud Mask for Collection 5. J. Atmos. Ocean. Technol. 2008, 25, 1057–1072. [Google Scholar] [CrossRef]
- Platnick, S.; King, M.D.; Ackerman, S.A.; Menzel, W.P.; Baum, B.A.; Riédi, J.C.; Frey, R.A. The MODIS cloud products: Algorithms and examples from terra. IEEE Trans. Geosci. Remote Sens. 2003, 41, 459–473. [Google Scholar] [CrossRef]
- Ackerman, S.A.; Holz, R.E.; Frey, R.; Eloranta, E.W.; Maddux, B.C.; McGill, M. Cloud Detection with MODIS. Part II: Validation. J. Atmos. Ocean. Technol. 2008, 25, 1073–1086. [Google Scholar] [CrossRef]
- Liu, Y.; Ackerman, S.A.; Maddux, B.C.; Key, J.R.; Frey, R.A. Errors in Cloud Detection over the Arctic Using a Satellite Imager and Implications for Observing Feedback Mechanisms. J. Clim. 2010, 23, 1894–1907. [Google Scholar] [CrossRef]
- Liu, Y.; Key, J.R.; Frey, R.A.; Ackerman, S.A.; Menzel, W.P. Nighttime polar cloud detection with MODIS. Remote Sens. Environ. 2004, 92, 181–194. [Google Scholar] [CrossRef]
- Maddux, B.C.; Ackerman, S.A.; Platnick, S. Viewing Geometry Dependencies in MODIS Cloud Products. J. Atmos. Ocean. Technol. 2010, 27, 1519–1528. [Google Scholar] [CrossRef]
- Liu, C.; Yang, S.; Di, D.; Yang, Y.; Zhou, C.; Hu, X.; Sohn, B.-J. A Machine Learning-based Cloud Detection Algorithm for the Himawari-8 Spectral Image. Adv. Atmos. Sci. 2021, 39, 1994–2007. [Google Scholar] [CrossRef]
- Irish, R.R.; Barker, J.L.; Goward, S.N.; Arvidson, T. Characterization of the Landsat-7 ETM+ Automated Cloud-Cover Assessment (ACCA) Algorithm. Photogramm. Eng. Remote Sens. 2006, 72, 1179–1188. [Google Scholar] [CrossRef]
- Karpatne, A.; Jiang, Z.; Vatsavai, R.R.; Shekhar, S.; Kumar, V. Monitoring Land-Cover Changes: A Machine-Learning Perspective. IEEE Geosci. Remote Sens. Mag. 2016, 4, 8–21. [Google Scholar] [CrossRef]
- Ishida, H.; Oishi, Y.; Morita, K.; Moriwaki, K.; Nakajima, T.Y. Development of a support vector machine based cloud detection method for MODIS with the adjustability to various conditions. Remote Sens. Environ. 2018, 205, 390–407. [Google Scholar] [CrossRef]
- Wang, Q.; Zhou, C.; Zhuge, X.; Liu, C.; Weng, F.; Wang, M. Retrieval of cloud properties from thermal infrared radiometry using convolutional neural network. Remote Sens. Environ. 2022, 278, 113079. [Google Scholar] [CrossRef]
- Tao, R.; Zhang, Y.; Wang, L.; Liu, Q.; Wang, J. U-High resolution network (U-HRNet): Cloud detection with high-resolution representations for geostationary satellite imagery. Int. J. Remote Sens. 2021, 42, 3511–3533. [Google Scholar] [CrossRef]
- Tuia, D.; Kellenberger, B.; P’erez-Suay, A.; Camps-Valls, G. A Deep Network Approach to Multitemporal Cloud Detection. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Li, X.; Yang, X.; Li, X.; Lu, S.; Ye, Y.; Ban, Y. GCDB-UNet: A novel robust cloud detection approach for remote sensing images. Knowl.Based Syst. 2022, 238, 107890. [Google Scholar] [CrossRef]
- Zhao, C.; Zhang, X.; Kuang, N.; Luo, H.; Zhong, S.; Fan, J. Boundary-Aware Bilateral Fusion Network for Cloud Detection. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5403014. [Google Scholar] [CrossRef]
- Li, J.; Hu, C.; Sheng, Q.; Wang, B.; Ling, X.; Gao, F.; Xu, Y.; Li, Z.; Molinier, M. A Unified Cloud Detection Method for Suomi-NPP VIIRS Day and Night PAN Imagery. IEEE Trans. Geosci. Remote Sens. 2024, 62, 4106913. [Google Scholar] [CrossRef]
- Gomis-Cebolla, J.; Jimenez, J.C.; Sobrino, J.A. MODIS probabilistic cloud masking over the Amazonian evergreen tropical forests: A comparison of machine learning-based methods. Int. J. Remote Sens. 2019, 41, 185–210. [Google Scholar] [CrossRef]
- Wang, C.; Platnick, S.; Meyer, K.; Zhang, Z.; Zhou, Y. A machine-learning-based cloud detection and thermodynamic-phase classification algorithm using passive spectral observations. Atmos. Meas. Tech. 2020, 13, 2257–2277. [Google Scholar] [CrossRef]
- Fu, H.; Shen, Y.; Liu, J.; He, G.; Chen, J.; Liu, P.; Qian, J.; Li, J. Cloud Detection for FY Meteorology Satellite Based on Ensemble Thresholds and Random Forests Approach. Remote Sens. 2018, 11, 44. [Google Scholar] [CrossRef]
- Yang, Y.; Sun, W.; Chi, Y.; Yan, X.; Fan, H.; Yang, X.; Ma, Z.; Wang, Q.; Zhao, C. Machine learning-based retrieval of day and night cloud macrophysical parameters over East Asia using Himawari-8 data. Remote Sens. Environ. 2022, 273, 112971. [Google Scholar] [CrossRef]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.; Liu, T.Y. LightGBM: A highly efficient gradient boosting decision tree. In Proceedings of the 31st International Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Dong, L.; Qi, J.; Yin, B.; Zhi, H.; Li, D.; Yang, S.; Wang, W.; Cai, H.; Xie, B. Reconstruction of Subsurface Salinity Structure in the South China Sea Using Satellite Observations: A LightGBM-Based Deep Forest Method. Remote Sens. 2022, 14, 3494. [Google Scholar] [CrossRef]
- Su, H.; Lu, X.; Chen, Z.; Zhang, H.; Lu, W.; Wu, W. Estimating Coastal Chlorophyll-A Concentration from Time-Series OLCI Data Based on Machine Learning. Remote Sens. 2021, 13, 576. [Google Scholar] [CrossRef]
- Xiang, L.; Xu, Y.; Sun, H.; Zhang, Q.; Zhang, L.; Zhang, L.; Zhang, X.; Huang, C.; Zhao, D. Retrieval of Subsurface Velocities in the Southern Ocean from Satellite Observations. Remote Sens. 2023, 15, 5699. [Google Scholar] [CrossRef]
- Ji, X.; Ma, Y.; Zhang, J.; Xu, W.; Wang, Y. A Sub-Bottom Type Adaption-Based Empirical Approach for Coastal Bathymetry Mapping Using Multispectral Satellite Imagery. Remote Sens. 2023, 15, 3570. [Google Scholar] [CrossRef]
- Lin, S.; Chen, N.; He, Z. Automatic Landform Recognition from the Perspective of Watershed Spatial Structure Based on Digital Elevation Models. Remote Sens. 2021, 13, 3926. [Google Scholar] [CrossRef]
- Bui, Q.-T.; Chou, T.-Y.; Hoang, T.-V.; Fang, Y.-M.; Mu, C.-Y.; Huang, P.-H.; Pham, V.-D.; Nguyen, Q.-H.; Anh, D.T.N.; Pham, V.-M.; et al. Gradient Boosting Machine and Object-Based CNN for Land Cover Classification. Remote Sens. 2021, 13, 2709. [Google Scholar] [CrossRef]
- Sevgen, E.; Abdikan, S. Classification of Large-Scale Mobile Laser Scanning Data in Urban Area with LightGBM. Remote Sens. 2023, 15, 3787. [Google Scholar] [CrossRef]
- Sang, M.; Xiao, H.; Jin, Z.; He, J.; Wang, N.; Wang, W. Improved Mapping of Regional Forest Heights by Combining Denoise and LightGBM Method. Remote Sens. 2023, 15, 5436. [Google Scholar] [CrossRef]
- Chai, X.; Li, J.; Zhao, J.; Wang, W.; Zhao, X. LGB-PHY: An Evaporation Duct Height Prediction Model Based on Physically Constrained LightGBM Algorithm. Remote Sens. 2022, 14, 3448. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, F.; Lin, H.; Xu, S. A Forest Fire Susceptibility Modeling Approach Based on Light Gradient Boosting Machine Algorithm. Remote Sens. 2022, 14, 4362. [Google Scholar] [CrossRef]
- Xiong, P.; Long, C.; Zhou, H.; Battiston, R.; Zhang, X.; Shen, X. Identification of Electromagnetic Pre-Earthquake Perturbations from the DEMETER Data by Machine Learning. Remote Sens. 2020, 12, 3643. [Google Scholar] [CrossRef]
- Yang, Z.; He, Q.; Miao, S.; Wei, F.; Yu, M. Surface Soil Moisture Retrieval of China Using Multi-Source Data and Ensemble Learning. Remote Sens. 2023, 15, 2786. [Google Scholar] [CrossRef]
- Wang, Q.; Zhou, C.; Letu, H.; Zhu, Y.; Zhuge, X.; Liu, C.; Weng, F.; Wang, M. Obtaining Cloud Base Height and Phase from Thermal Infrared Radiometry Using a Deep Learning Algorithm. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4105914. [Google Scholar] [CrossRef]
- Zhuge, X.; Zou, X.; Wang, Y. Determining AHI Cloud-Top Phase and Intercomparisons with MODIS Products Over North Pacific. IEEE Trans. Geosci. Remote Sens. 2021, 59, 436–448. [Google Scholar] [CrossRef]
- Wang, X.; Iwabuchi, H.; Yamashita, T. Cloud identification and property retrieval from Himawari-8 infrared measurements via a deep neural network. Remote Sens. Environ. 2022, 275, 113026. [Google Scholar] [CrossRef]
- Min, M.; Li, J.; Wang, F.; Liu, Z.; Menzel, W.P. Retrieval of cloud top properties from advanced geostationary satellite imager measurements based on machine learning algorithms. Remote Sens. Environ. 2020, 239, 111616. [Google Scholar] [CrossRef]
- Tan, Z.; Huo, J.; Ma, S.; Han, D.; Wang, X.; Hu, S.; Yan, W. Estimating cloud base height from Himawari-8 based on a random forest algorithm. Int. J. Remote Sens. 2020, 42, 2485–2501. [Google Scholar] [CrossRef]
- Yu, Z.; Ma, S.; Han, D.; Li, G.; Gao, D.; Yan, W. A cloud classification method based on random forest for FY-4A. Int. J. Remote Sens. 2021, 42, 3353–3379. [Google Scholar] [CrossRef]
- Zhang, C.; Zhuge, X.; Yu, F. Development of a high spatiotemporal resolution cloud-type classification approach using Himawari-8 and CloudSat. Int. J. Remote Sens. 2019, 40, 6464–6481. [Google Scholar] [CrossRef]
- Haralick, R.M. Statistical and Structural Approaches to Texture. Proc. IEEE 1979, 67, 786–804. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 3, 610–620. [Google Scholar] [CrossRef]
- Baron, J.; Hill, D.J. Monitoring grassland invasion by spotted knapweed (Centaurea maculosa) with RPAS-acquired multispectral imagery. Remote Sens. Environ. 2020, 249, 112008. [Google Scholar] [CrossRef]
- Dasgupta, A.; Grimaldi, S.; Ramsankaran, R.A.A.J.; Pauwels, V.R.N.; Walker, J.P. Towards operational SAR-based flood mapping using neuro-fuzzy texture-based approaches. Remote Sens. Environ. 2018, 215, 313–329. [Google Scholar] [CrossRef]
- Ferreira, M.P.; Wagner, F.H.; Aragão, L.E.O.C.; Shimabukuro, Y.E.; de Souza Filho, C.R. Tree species classification in tropical forests using visible to shortwave infrared WorldView-3 images and texture analysis. ISPRS J. Photogramm. Remote Sens. 2019, 149, 119–131. [Google Scholar] [CrossRef]
- Lobert, F.; Holtgrave, A.-K.; Schwieder, M.; Pause, M.; Vogt, J.; Gocht, A.; Erasmi, S. Mowing event detection in permanent grasslands: Systematic evaluation of input features from Sentinel-1, Sentinel-2, and Landsat 8 time series. Remote Sens. Environ. 2021, 267, 112751. [Google Scholar] [CrossRef]
- Mahmud, M.S.; Nandan, V.; Singha, S.; Howell, S.E.; Geldsetzer, T.; Yackel, J.; Montpetit, B. C- and L-band SAR signatures of Arctic sea ice during freeze-up. Remote Sens. Environ. 2022, 279, 113129. [Google Scholar] [CrossRef]
- Onojeghuo, A.O.; Blackburn, G.A. Optimising the use of hyperspectral and LiDAR data for mapping reedbed habitats. Remote Sens. Environ. 2011, 115, 2025–2034. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.F.; Chica-Olmo, M.; Abarca-Hernandez, F.; Atkinson, P.M.; Jeganathan, C. Random Forest classification of Mediterranean land cover using multi-seasonal imagery and multi-seasonal texture. Remote Sens. Environ. 2012, 121, 93–107. [Google Scholar] [CrossRef]
- Su, H.; Wang, Y.; Xiao, J.; Li, L. Improving MODIS sea ice detectability using gray level co-occurrence matrix texture analysis method: A case study in the Bohai Sea. ISPRS J. Photogramm. Remote Sens. 2013, 85, 13–20. [Google Scholar] [CrossRef]
- Wang, Y.; Gu, L.; Li, X.; Gao, F.; Jiang, T. Coexisting Cloud and Snow Detection Based on a Hybrid Features Network Applied to Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5405515. [Google Scholar] [CrossRef]
- Ghasemian, N.; Akhoondzadeh, M. Introducing two Random Forest based methods for cloud detection in remote sensing images. Adv. Space Res. 2018, 62, 288–303. [Google Scholar] [CrossRef]
- Singh, R.; Biswas, M.; Pal, M. Cloud detection using sentinel 2 imageries: A comparison of XGBoost, RF, SVM, and CNN algorithms. Geocarto Int. 2022, 38, 1–32. [Google Scholar] [CrossRef]
- Zheng, X.; Hui, F.; Huang, Z.; Wang, T.; Huang, H.; Wang, Q. Ice/Snow Surface Temperature Retrieval From Chinese FY-3D MERSI-II Data: Algorithm and Preliminary Validation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4512715. [Google Scholar] [CrossRef]
- Zheng, X.; Huang, Z.; Wang, T.; Guo, Y.; Zeng, H.; Ye, X. Toward an Operational Scheme for Deriving High-Spatial-Resolution Temperature and Emissivity Based on FengYun-3D MERSI-II Thermal Infrared Data. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5004412. [Google Scholar] [CrossRef]
- Jin, S.; Zhang, M.; Ma, Y.; Gong, W.; Chen, C.; Yang, L.; Hu, X.; Liu, B.; Chen, N.; Du, B.; et al. Adapting the Dark Target Algorithm to Advanced MERSI Sensor on the FengYun-3-D Satellite: Retrieval and Validation of Aerosol Optical Depth Over Land. IEEE Trans. Geosci. Remote Sens. 2021, 59, 8781–8797. [Google Scholar] [CrossRef]
- Ni, Z.; Wu, M.; Lu, Q.; Huo, H.; Wang, F. Research on infrared hyperspectral remote sensing cloud detection method based on deep learning. Int. J. Remote Sens. 2023, 45, 7497–7517. [Google Scholar] [CrossRef]
- Winker, D.M.; Vaughan, M.A.; Omar, A.; Hu, Y.; Powell, K.A.; Liu, Z.; Hunt, W.H.; Young, S.A. Overview of the CALIPSO Mission and CALIOP Data Processing Algorithms. J. Atmos. Ocean. Technol. 2009, 26, 2310–2323. [Google Scholar] [CrossRef]
- Poulsen, C.; Egede, U.; Robbins, D.; Sandeford, B.; Tazi, K.; Zhu, T. Evaluation and comparison of a machine learning cloud identification algorithm for the SLSTR in polar regions. Remote Sens. Environ. 2020, 248, 111999. [Google Scholar] [CrossRef]
- Hall-Beyer, M. Practical guidelines for choosing GLCM textures to use in landscape classification tasks over a range of moderate spatial scales. Int. J. Remote Sens. 2017, 38, 1312–1338. [Google Scholar] [CrossRef]
- van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.D.; Boulogne, F.; Warner, J.; Yager, N.; Gouillart, E.; Yu, T. Scikit-image: Image processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef]
- Curry, J.A.; Schramm, J.L.; Rossow, W.B.; Randall, D. Overview of Arctic Cloud and Radiation Characteristics. J. Clim. 1996, 9, 1731–1764. [Google Scholar] [CrossRef]
- Chen, L.; Zhuge, X.; Tang, X.; Song, J.; Wang, Y. A New Type of Red-Green-Blue Composite and Its Application in Tropical Cyclone Center Positioning. Remote Sens. 2022, 14, 539. [Google Scholar] [CrossRef]
- Baum, B.A.; Menzel, W.P.; Frey, R.A.; Tobin, D.C.; Holz, R.E.; Ackerman, S.A.; Heidinger, A.K.; Yang, P. MODIS Cloud-Top Property Refinements for Collection 6. J. Appl. Meteorol. Climatol. 2012, 51, 1145–1163. [Google Scholar] [CrossRef]
- Lyapustin, A.; Wang, Y.; Frey, R. An automatic cloud mask algorithm based on time series of MODIS measurements. J. Geophys. Res. Atmos. 2008, 113, D16. [Google Scholar] [CrossRef]
- Rutan, D.; Khlopenkov, K.; Radkevich, A.; Kato, S. A Supplementary Clear-Sky Snow and Ice Recognition Technique for CERES Level 2 Products. J. Atmos. Ocean. Technol. 2013, 30, 557–568. [Google Scholar] [CrossRef]
- Ackerman, S.A. Global Satellite Observations of Negative Brightness Temperature Differences between 11 and 6.7 µm. J. Atmos. Sci. 1996, 53, 2803–2812. [Google Scholar] [CrossRef]
- Keller, G.R.; Wang, Z.; Wu, A.; Xiong, X. Aqua MODIS Band 24 Crosstalk Striping. IEEE Geosci. Remote Sens. Lett. 2017, 14, 475–479. [Google Scholar] [CrossRef]
- Bouali, M.; Ignatov, A. Estimation of Detector Biases in MODIS Thermal Emissive Bands. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4339–4348. [Google Scholar] [CrossRef]
- Sun, J.; Guenther, B.; Wang, M. Crosstalk Effect and Its Mitigation in Aqua MODIS Middle-Wave Infrared Bands. Earth Space Sci. 2019, 6, 698–715. [Google Scholar] [CrossRef]
- Dorigo, W.; Lucieer, A.; Podobnikar, T.; Čarni, A. Mapping invasive Fallopia japonica by combined spectral, spatial, and temporal analysis of digital orthophotos. Int. J. Appl. Earth Obs. Geoinf. 2012, 19, 185–195. [Google Scholar] [CrossRef]
- Franklin, S.E.; Hall, R.J.; Moskal, L.M.; Maudie, A.J.; Lavigne, M.B. Incorporating texture into classification of forest species composition from airborne multispectral images. Int. J. Remote Sens. 2000, 21, 61–79. [Google Scholar] [CrossRef]
- Puissant, A.; Hirsch, J.; Weber, C. The utility of texture analysis to improve per-pixel classification for high to very high spatial resolution imagery. Int. J. Remote Sens. 2006, 26, 733–745. [Google Scholar] [CrossRef]
- Chen, D.; Stow, D.A.; Gong, P. Examining the effect of spatial resolution and texture window size on classification accuracy: An urban environment case. Int. J. Remote Sens. 2010, 25, 2177–2192. [Google Scholar] [CrossRef]
- Murray, H.; Lucieer, A.; Williams, R. Texture-based classification of sub-Antarctic vegetation communities on Heard Island. Int. J. Appl. Earth Obs. Geoinf. 2010, 12, 138–149. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Central Wavelength (µm) | Spectral Bandwidth (nm) | IFOV * | Dynamic Range |
|---|---|---|---|---|
| BT20 | 3.80 | 180 | 1000 | 200–350 K |
| BT21 | 4.05 | 155 | 1000 | 200–380 K |
| BT22 | 7.20 | 500 | 1000 | 180–280 K |
| BT23 | 8.55 | 300 | 1000 | 180–300 K |
| BT24 | 10.80 | 1000 | 250 | 180–330 K |
| BT25 | 12.00 | 1000 | 250 | 180–330 K |
| Year | Days | Number of Samples | ||
|---|---|---|---|---|
| Total | Cloud | Clear | ||
| 2018 | 73 | 2,219,221 | 1,555,325 | 663,896 |
| 2019 | 164 | 4,249,203 | 2,942,037 | 1,307,166 |
| 2020 | 163 | 3,930,369 | 2,684,574 | 1,245,795 |
| 2021 | 148 | 2,764,490 | 1,896,118 | 868,372 |
| 2022 | 127 | 1,206,558 | 812,411 | 394,147 |
| 2023 | 45 | 304,583 | 199,360 | 105,223 |
| Total | 720 | 14,674,424 | 10,089,825 | 4,584,599 |
| Feature | Derivation | |
|---|---|---|
| Contrast (CON) | (1) | |
| Homogeneity (HOM) | (2) | |
| Angular Second Moment (ASM) | (3) | |
| Correlation (COR) | (4) |
| Predicted Label | |||
|---|---|---|---|
| Cloud | Clear | ||
| True label | Cloud | TP | FN |
| Clear | FP | TN | |
| Metric | Derivation | |
|---|---|---|
| Overall Accuracy (OA) | (5) | |
| Precision | (6) | |
| Recall | (7) | |
| F1-score (F1) | (8) |
| OA/F1 | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| 3 × 3 | 84.60%/0.8902 | 84.60%/0.8902 | - | - | - |
| 7 × 7 | 85.69%/0.8980 | 85.65%/0.8977 | 85.59%/0.8974 | - | - |
| 15 × 15 | 86.19%/0.9012 | 86.12%/0.9006 | 86.05%/0.9003 | 86.07%/0.9004 | 86.14%/0.9009 |
| 31 × 31 | 85.99%/0.8997 | 85.97%/0.8995 | 85.92%/0.8993 | 85.90%/0.8991 | 85.87%/0.8989 |
| Metrics | 4-Bits | 5-Bits | 6-Bits | 7-Bits | 8-Bits |
|---|---|---|---|---|---|
| OA | 83.35% | 83.96% | 84.59% | 85.09% | 85.69% |
| F1 | 0.8814 | 0.8858 | 0.8902 | 0.8938 | 0.8980 |
| Precision | 86.02% | 86.43% | 86.85% | 87.21% | 87.82% |
| Recall | 76.51% | 90.83% | 91.31% | 91.67% | 91.87% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Wu, Y.; Li, J.; Sun, A.; Zhang, N.; Liang, Y. A Machine Learning Algorithm Using Texture Features for Nighttime Cloud Detection from FY-3D MERSI L1 Imagery. Remote Sens. 2025, 17, 1083. https://doi.org/10.3390/rs17061083
Li Y, Wu Y, Li J, Sun A, Zhang N, Liang Y. A Machine Learning Algorithm Using Texture Features for Nighttime Cloud Detection from FY-3D MERSI L1 Imagery. Remote Sensing. 2025; 17(6):1083. https://doi.org/10.3390/rs17061083
Chicago/Turabian StyleLi, Yilin, Yuhao Wu, Jun Li, Anlai Sun, Naiqiang Zhang, and Yonglou Liang. 2025. "A Machine Learning Algorithm Using Texture Features for Nighttime Cloud Detection from FY-3D MERSI L1 Imagery" Remote Sensing 17, no. 6: 1083. https://doi.org/10.3390/rs17061083
APA StyleLi, Y., Wu, Y., Li, J., Sun, A., Zhang, N., & Liang, Y. (2025). A Machine Learning Algorithm Using Texture Features for Nighttime Cloud Detection from FY-3D MERSI L1 Imagery. Remote Sensing, 17(6), 1083. https://doi.org/10.3390/rs17061083