


ICESat-2 Performance for Terrain and Canopy Height Retrieval in Complex Mountainous Environments

Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Study Data
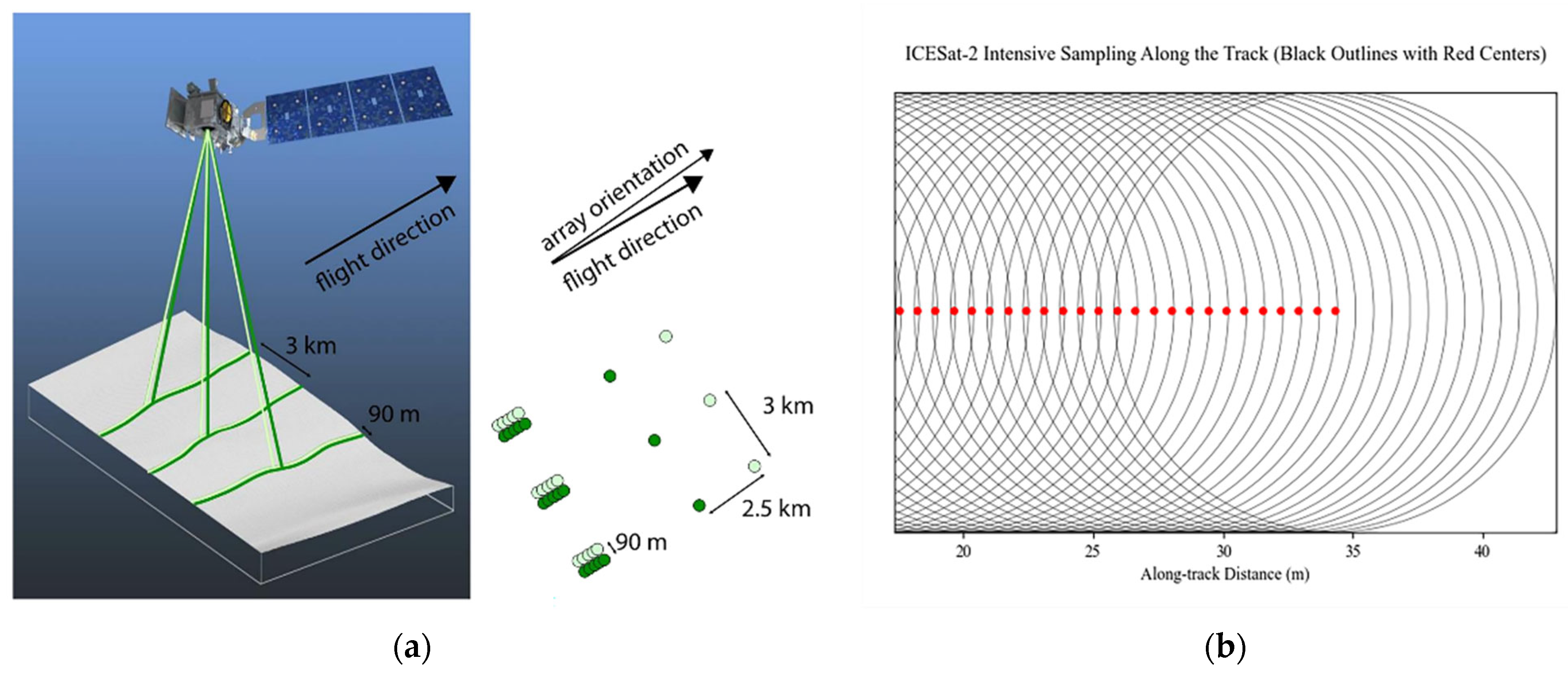
2.2.1. ICESat-2 Data
2.2.2. LiCHy Airborne LiDAR Data
2.2.3. Auxiliary Data
2.3. ATL03 Data Processing
2.4. Accuracy Assessment
3. Results
3.1. Assessment of Photon Classification Performance
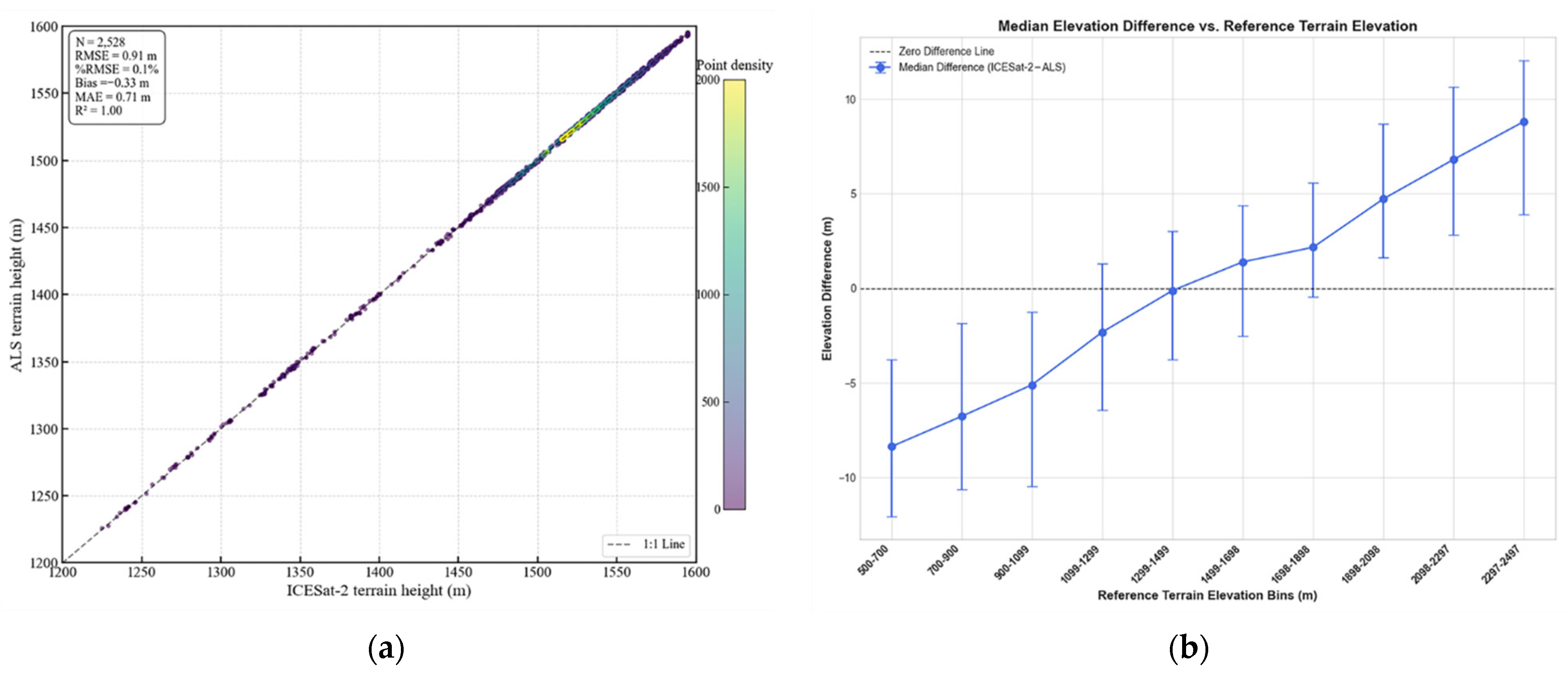
3.2. Terrain Height Validation
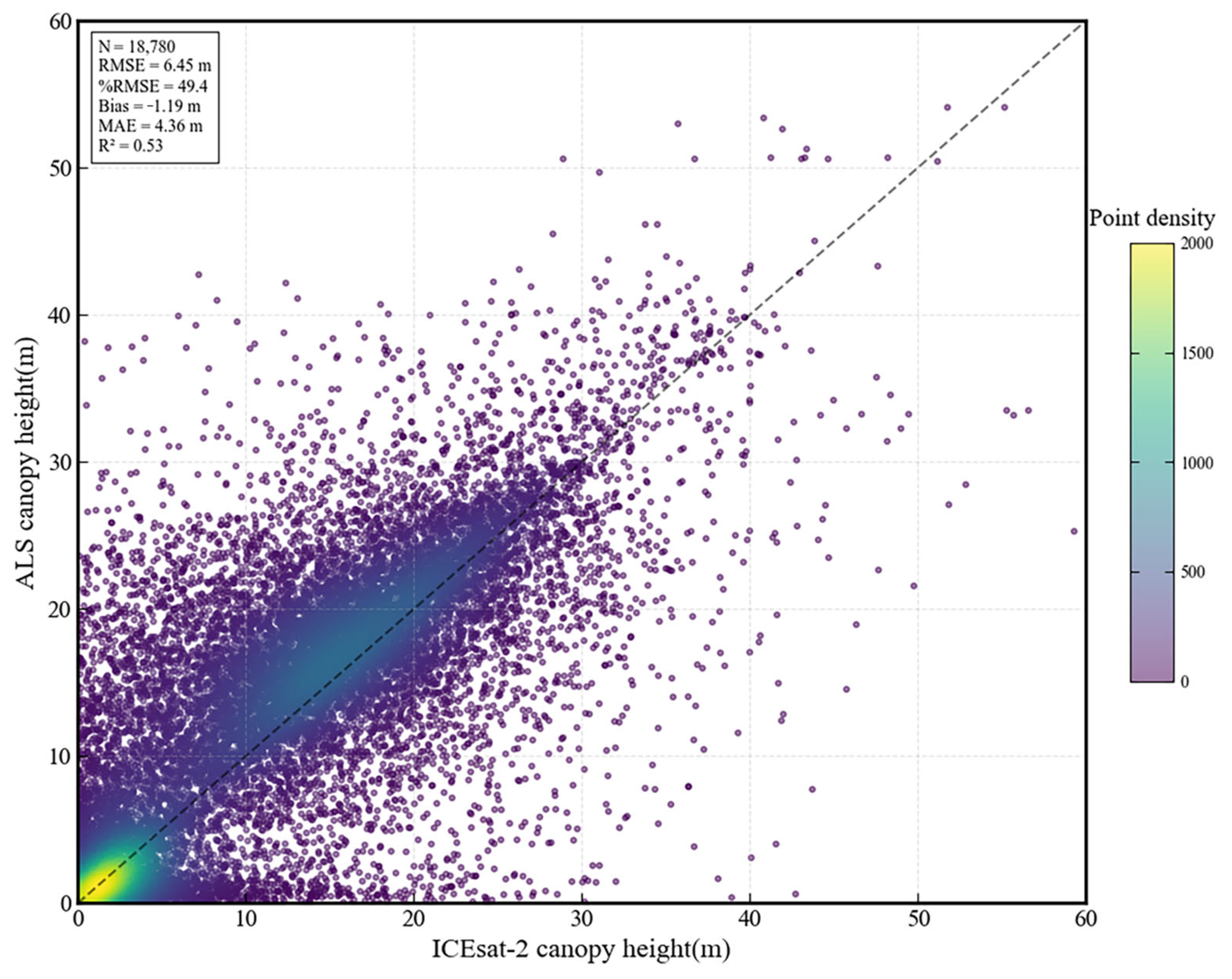
3.3. Canopy Height Validation
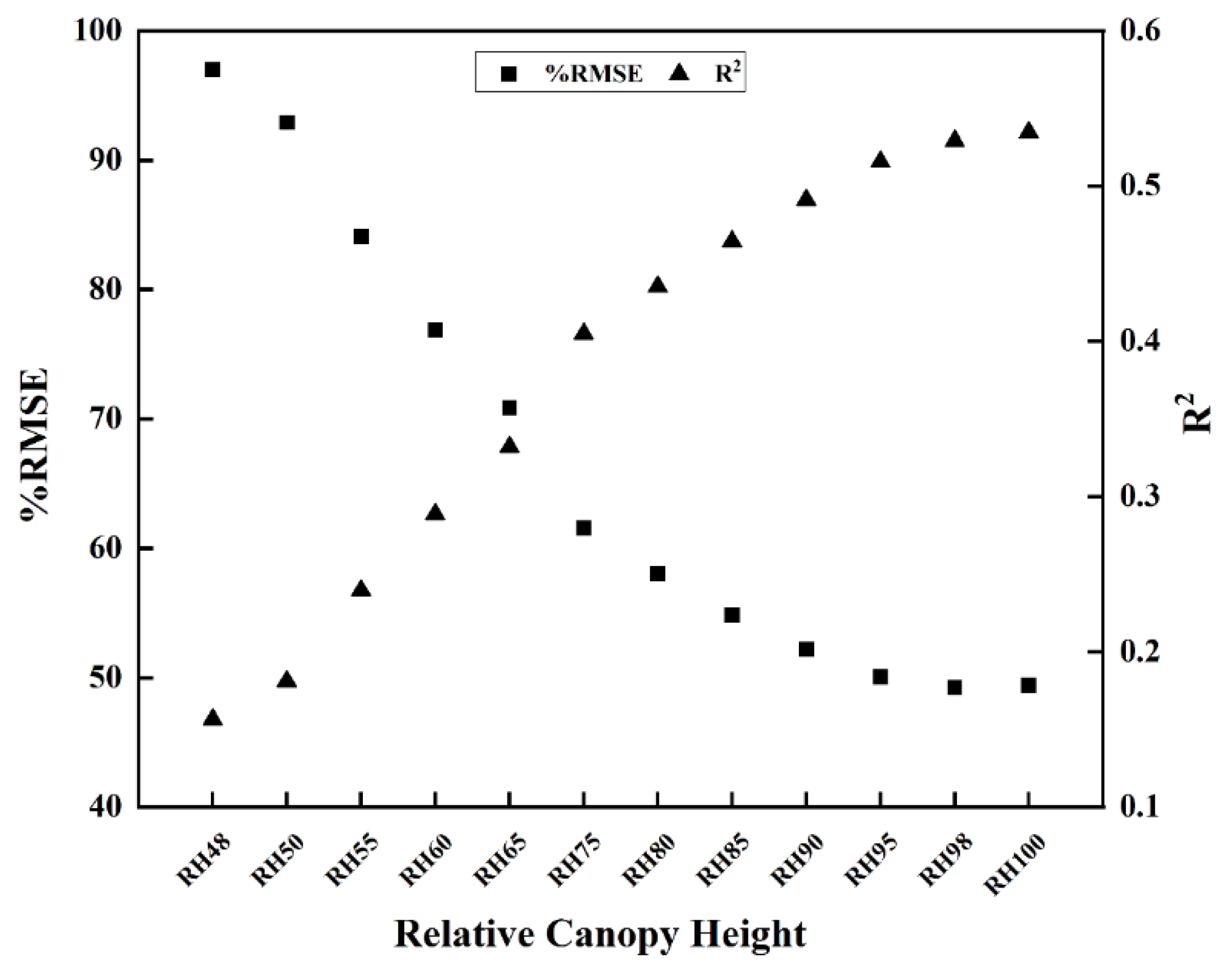
3.4. Influence of Relative Height Metrics on Canopy Height Accuracy
4. Discussion
4.1. Uncertainty Analysis of Terrain and Canopy Height Estimations
4.2. Analysis of Factors Affecting Terrain Elevation Retrieval Accuracy
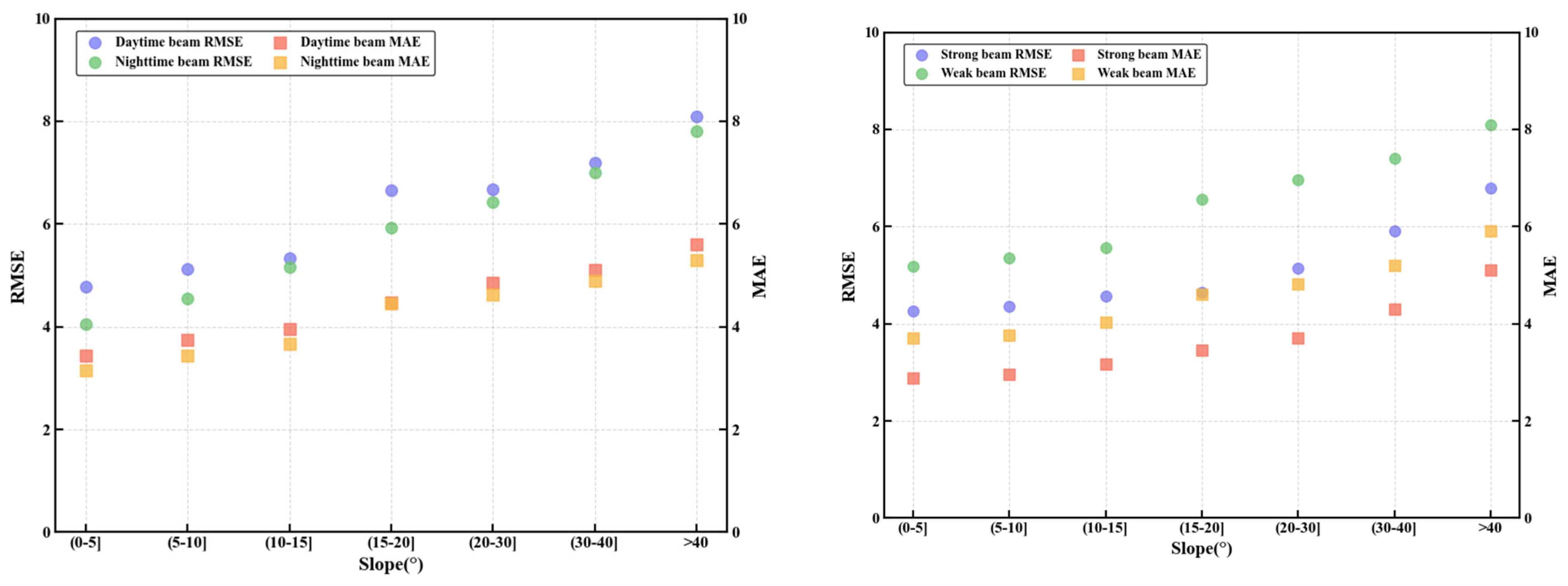
4.2.1. Analysis of Terrain Slope Effects
4.2.2. Analysis of Canopy Height Effects
4.2.3. Analysis of Vegetation Coverage and Density Effects
4.2.4. Analysis of Day and Night Observation Differences
4.3. Analysis of Factors Affecting Canopy Height Retrieval Accuracy
4.3.1. Analysis of Terrain Slope Effects
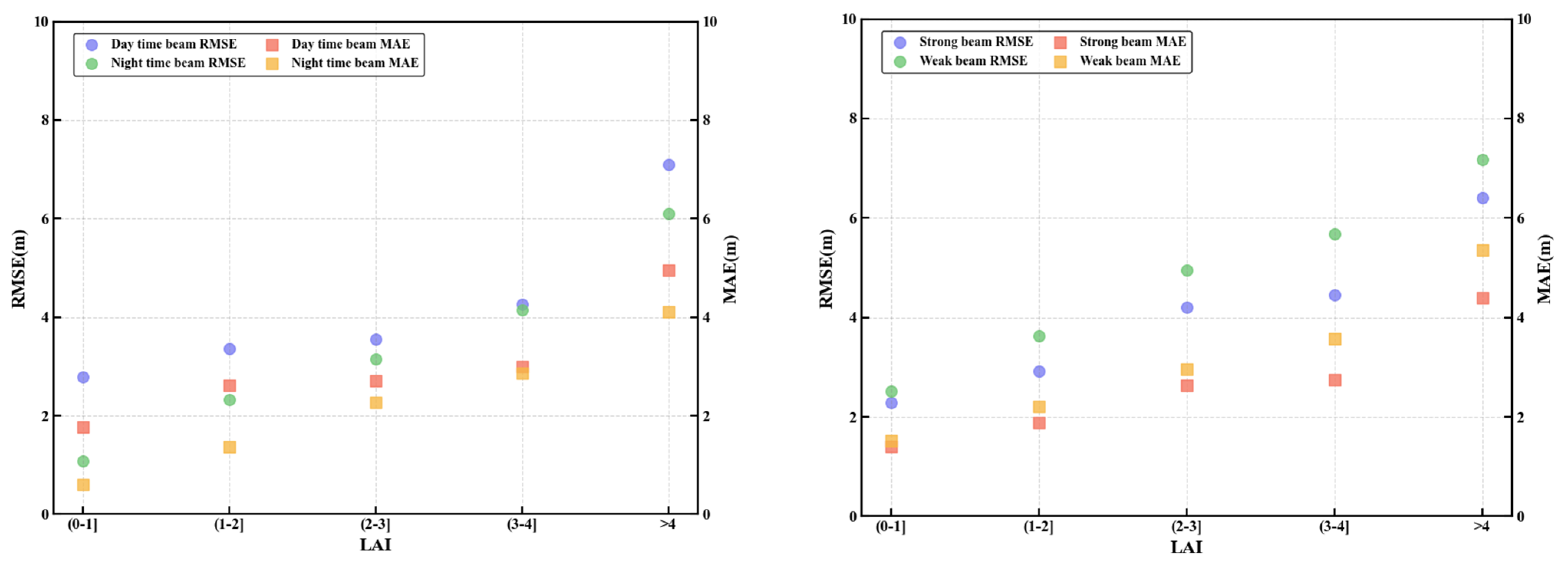
4.3.2. Analysis of Vegetation Coverage and Leaf Area Index Effects
4.3.3. Analysis of Canopy Height Effects
4.3.4. Analysis of Vegetation Type Effects
4.4. Multi-Scale Collaborative Optimization Framework
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ALS | Airborne Laser Scanning |
| SDG | Sustainable Development Goals |
| ATLAS | Advanced Topographic Laser Altimeter System |
| BDT-ADBSCAN | Bayesian Decision Theory—Adaptive Density-Based Spatial Clustering of Applications with Noise |
| CHM | Canopy Height Model |
| DEM | Digital Elevation Model |
| DBSCAN | Density-Based Spatial Clustering of Applications with Noise |
| DTM | Digital Terrain Model |
| CESat-2 | Ice, Cloud, and Land Elevation Satellite-2 |
| IPTD | Iterative Progressive TIN Densification |
| LiCHy | LiDAR-CCD-Hyperspectral |
| TIN | Triangulated Irregular Network |
| WGS84 | World Geodetic System 1984 |
References
- Fuller, M.R.; Ganjam, M.; Baker, J.S.; Abt, R.C. Advancing Forest Carbon Projections Requires Improved Convergence between Ecological and Economic Models. Carbon Balance Manag. 2025, 20, 2. [Google Scholar] [CrossRef] [PubMed]
- Canadell, J.G.; Raupach, M.R. Managing Forests for Climate Change Mitigation. Science 2008, 320, 1456–1457. [Google Scholar] [CrossRef] [PubMed]
- Xu, W.; Cheng, Y.; Luo, M.; Mai, X.; Wang, W.; Zhang, W.; Wang, Y. Progress and Limitations in Forest Carbon Stock Estimation Using Remote Sensing Technologies: A Comprehensive Review. Forests 2025, 16, 449. [Google Scholar] [CrossRef]
- Yang, J.; Swenson, N.G. Height and Crown Allometries and Their Relationship with Functional Traits: An Example from a Subtropical Wet Forest. Ecol. Evol. 2023, 13, e9804. [Google Scholar] [CrossRef]
- Huang, J.; Yu, Y. Understory Terrain Estimation by Synergizing Ice, Cloud, and Land Elevation Satellite-2 and Multi-Source Remote Sensing Data. Remote Sens. 2024, 16, 4770. [Google Scholar] [CrossRef]
- Hudak, A.T.; Lefsky, M.A.; Cohen, W.B.; Berterretche, M. Integration of Lidar and Landsat ETM+ Data for Estimating and Mapping Forest Canopy Height. Remote Sens. Environ. 2002, 82, 397–416. [Google Scholar] [CrossRef]
- Gómez, C.; White, J.C.; Wulder, M.A. Optical Remotely Sensed Time Series Data for Land Cover Classification: A Review. ISPRS J. Photogramm. Remote Sens. 2016, 116, 55–72. [Google Scholar] [CrossRef]
- Ho Tong Minh, D.; Le Toan, T.; Rocca, F.; Tebaldini, S.; Villard, L.; Réjou-Méchain, M.; Phillips, O.L.; Feldpausch, T.R.; Dubois-Fernandez, P.; Scipal, K.; et al. SAR Tomography for the Retrieval of Forest Biomass and Height: Cross-Validation at Two Tropical Forest Sites in French Guiana. Remote Sens. Environ. 2016, 175, 138–147. [Google Scholar] [CrossRef]
- Becker, A.; Russo, S.; Puliti, S.; Lang, N.; Schindler, K.; Wegner, J.D. Country-Wide Retrieval of Forest Structure from Optical and SAR Satellite Imagery with Deep Ensembles. ISPRS J. Photogramm. Remote Sens. 2023, 195, 269–286. [Google Scholar] [CrossRef]
- Chen, X.; Sun, Q.; Hu, J. Generation of Complete SAR Geometric Distortion Maps Based on DEM and Neighbor Gradient Algorithm. Appl. Sci. 2018, 8, 2206. [Google Scholar] [CrossRef]
- Mo, L.; Zohner, C.M.; Reich, P.B.; Liang, J.; De Miguel, S.; Nabuurs, G.-J.; Renner, S.S.; Van Den Hoogen, J.; Araza, A.; Herold, M.; et al. Integrated Global Assessment of the Natural Forest Carbon Potential. Nature 2023, 624, 92–101. [Google Scholar] [CrossRef] [PubMed]
- Kutchartt, E.; Pedron, M.; Pirotti, F. Assessment of Canopy and Ground Height Accuracy from Gedi Lidar over Steep Mountain Areas. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, V-3–2022, 431–438. [Google Scholar] [CrossRef]
- Campbell, M.J.; Eastburn, J.F.; Dennison, P.E.; Vogeler, J.C.; Stovall, A.E.L. Evaluating the Performance of Airborne and Spaceborne Lidar for Mapping Biomass in the United States’ Largest Dry Woodland Ecosystem. Remote Sens. Environ. 2024, 308, 114196. [Google Scholar] [CrossRef]
- Fayad, I.; Baghdadi, N.; Alcarde Alvares, C.; Stape, J.L.; Bailly, J.S.; Scolforo, H.F.; Cegatta, I.R.; Zribi, M.; Le Maire, G. Terrain Slope Effect on Forest Height and Wood Volume Estimation from GEDI Data. Remote Sens. 2021, 13, 2136. [Google Scholar] [CrossRef]
- Pronk, M.; Eleveld, M.; Ledoux, H. Assessing Vertical Accuracy and Spatial Coverage of ICESat-2 and GEDI Spaceborne Lidar for Creating Global Terrain Models. Remote Sens. 2024, 16, 2259. [Google Scholar] [CrossRef]
- Neuenschwander, A.L.; Magruder, L.A. Canopy and Terrain Height Retrievals with Icesat-2: A First Look. Remote Sens. 2019, 11, 1721. [Google Scholar] [CrossRef]
- Neuenschwander, A.; Guenther, E.; White, J.C.; Duncanson, L.; Montesano, P. Validation of ICESat-2 Terrain and Canopy Heights in Boreal Forests. Remote Sens. Environ. 2020, 251, 112110. [Google Scholar] [CrossRef]
- Liu, A.; Cheng, X.; Chen, Z. Performance Evaluation of GEDI and ICESat-2 Laser Altimeter Data for Terrain and Canopy Height Retrievals. Remote Sens. Environ. 2021, 264, 112571. [Google Scholar] [CrossRef]
- Malambo, L.; Popescu, S.C. Assessing the Agreement of ICESat-2 Terrain and Canopy Height with Airborne Lidar over US Ecozones. Remote Sens. Environ. 2021, 266, 112711. [Google Scholar] [CrossRef]
- Wang, C.; Zhu, X.; Nie, S.; Xi, X.; Li, D.; Zheng, W.; Chen, S. Ground Elevation Accuracy Verification of ICESat-2 Data: A Case Study in Alaska, USA. Opt. Express 2019, 27, 38168–38179. [Google Scholar] [CrossRef]
- Xing, Y.; Huang, J.; Gruen, A.; Qin, L. Assessing the Performance of ICESat-2/ATLAS Multi-Channel Photon Data for Estimating Ground Topography in Forested Terrain. Remote Sens. 2020, 12, 2084. [Google Scholar] [CrossRef]
- Wang, T.; Xu, W.; Bao, A.; Yuan, Y.; Zheng, G.; Naibi, S.; Huang, X.; Wang, Z.; Zheng, X.; Bao, J.; et al. Mapping of Forest Structural Parameters in Tianshan Mountain Using Bayesian-Random Forest Model, Synthetic Aperture Radar Sentinel-1A, and Sentinel-2 Imagery. Remote Sens. 2024, 16, 1268. [Google Scholar] [CrossRef]
- Urbazaev, M.; Hess, L.L.; Hancock, S.; Sato, L.Y.; Ometto, J.P.; Thiel, C.; Dubois, C.; Heckel, K.; Urban, M.; Adam, M.; et al. Assessment of Terrain Elevation Estimates from Icesat-2 and Gedi Spaceborne Lidar Missions across Different Land Cover and Forest Types. Sci. Remote Sens. 2022, 6, 100067. [Google Scholar] [CrossRef]
- Magruder, L.; Brunt, K.; Alonzo, M. Early ICESat-2 on-Orbit Geolocation Validation Using Ground-Based Corner Cube Retro-Reflectors. Remote Sens. 2020, 12, 3653. [Google Scholar] [CrossRef]
- Zhu, X.; Ren, Z.; Nie, S.; Bao, G.; Ha, G.; Bai, M.; Liang, P. DEM Generation from GF-7 Satellite Stereo Imagery Assisted by Space-Borne LiDAR and Its Application to Active Tectonics. Remote Sens. 2023, 15, 1480. [Google Scholar] [CrossRef]
- Zhou, L.; Sun, G.; Li, Y.; Li, W.; Su, Z. Point Cloud Denoising Review: From Classical to Deep Learning-Based Approaches. Graph. Models 2022, 121, 101140. [Google Scholar] [CrossRef]
- Mei, H.; Mao, L.; Zhang, Y.; Chen, M. Bdt-Adbscan: Adaptive Density-Based Spatial Clustering of Applications with Noise Based on Bayesian Decision Theory for Identifying Clusters with Multi-Densities. In Proceedings of the 2022 IEEE 10th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 17–19 June 2022; pp. 1510–1516. [Google Scholar]
- Huang, X.; Cheng, F.; Wang, J.; Duan, P.; Wang, J. Forest Canopy Height Extraction Method Based on ICESat-2/ATLAS Data. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–14. [Google Scholar] [CrossRef]
- Wu, Z.; Shi, F. Mapping Forest Canopy Height at Large Scales Using ICESat-2 and Landsat: An Ecological Zoning Random Forest Approach. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–16. [Google Scholar] [CrossRef]
- Bourgine, B.; Baghdadi, N.; Hosford, S.; Daniels, P. Generation of a Ground-Level DEM in a Dense Equatorial Forest Zone by Merging Airborne Laser Data and a Top-of-Canopy DEM. Can. J. Remote Sens. 2004, 30, 913–926. [Google Scholar] [CrossRef]
- Balasundaram, S.; Prasad, S.C. Robust Twin Support Vector Regression Based on Huber Loss Function. Neural Comput. Appl. 2020, 32, 11285–11309. [Google Scholar] [CrossRef]
- Gupta, D.; Hazarika, B.B.; Berlin, M. Robust Regularized Extreme Learning Machine with Asymmetric Huber Loss Function. Neural Comput. Appl. 2020, 32, 12971–12998. [Google Scholar] [CrossRef]
- Tang, J.; Xing, Y.; Wang, J.; Yang, H.; Wang, D.; Li, Y.; Zhang, A. A Multilevel Autoadaptive Denoising Algorithm Based on Forested Terrain Slope for ICESat-2 Photon-Counting Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 16831–16846. [Google Scholar] [CrossRef]
- He, L.; Pang, Y.; Zhang, Z.; Liang, X.; Chen, B. ICESat-2 Data Classification and Estimation of Terrain Height and Canopy Height. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103233. [Google Scholar] [CrossRef]
- Li, Y.; Gao, S.; Fu, H.; Zhu, J.; Hu, Q.; Zeng, D.; Wei, Y. Error Analysis and Accuracy Improvement in Forest Canopy Height Estimation Based on Gedi L2a Product: A Case Study in the United States. Forests 2024, 15, 1536. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Experimental Comparison of Filter Algorithms for Bare-Earth Extraction from Airborne Laser Scanning Point Clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Meng, X.; Currit, N.; Zhao, K. Ground Filtering Algorithms for Airborne Lidar Data: A Review of Critical Issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef]
- Zhu, X.; Nie, S.; Wang, C.; Xi, X. The Performance of Icesat-2′s Strong and Weak Beams in Estimating Ground Elevation and Forest Height. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 6073–6076. [Google Scholar]
- Magruder, L.A.; Brunt, K.M. Performance Analysis of Airborne Photon- Counting Lidar Data in Preparation for the Icesat-2 Mission. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2911–2918. [Google Scholar] [CrossRef]
- Anderson, K.; Hancock, S.; Disney, M.; Gaston, K.J. Is Waveform Worth It? A Comparison of Li DAR Approaches for Vegetation and Landscape Characterization. Remote Sens. Ecol. Conserv. 2016, 2, 5–15. [Google Scholar] [CrossRef]
- Zhang, Z.; Ding, J.; Zhu, C.; Wang, J.; Ma, G.; Ge, X.; Li, Z.; Han, L. Strategies for the Efficient Estimation of Soil Organic Matter in Salt-Affected Soils through Vis-NIR Spectroscopy: Optimal Band Combination Algorithm and Spectral Degradation. Geoderma 2021, 382, 114729. [Google Scholar] [CrossRef]
- Neuenschwander, A.; Magruder, L. The Potential Impact of Vertical Sampling Uncertainty on ICESat-2/ATLAS Terrain and Canopy Height Retrievals for Multiple Ecosystems. Remote Sens. 2016, 8, 1039. [Google Scholar] [CrossRef]
- Liu, J.; Liu, J.; Xie, H.; Ye, D.; Li, P. A Multi-Level Auto-Adaptive Noise-Filtering Algorithm for Land Icesat-2 Photon-Counting Data. Remote Sens. 2023, 15, 5176. [Google Scholar] [CrossRef]
- Moudrý, V.; Gdulová, K.; Gábor, L.; Šárovcová, E.; Barták, V.; Leroy, F.; Špatenková, O.; Rocchini, D.; Prošek, J. Effects of Environmental Conditions on ICESat-2 Terrain and Canopy Heights Retrievals in Central European Mountains. Remote Sens. Environ. 2022, 279, 113112. [Google Scholar] [CrossRef]
- Carrea, D.; Abellan, A.; Humair, F.; Matasci, B.; Derron, M.-H.; Jaboyedoff, M. Correction of Terrestrial Lidar Intensity Channel Using Oren–Nayar Reflectance Model: An Application to Lithological Differentiation. ISPRS J. Photogramm. Remote Sens. 2016, 113, 17–29. [Google Scholar] [CrossRef]
- Habib, A.F.; Kersting, A.P.; Shaker, A.; Yan, W.-Y. Geometric Calibration and Radiometric Correction of Lidar Data and Their Impact on the Quality of Derived Products. Sensors 2011, 11, 9069–9097. [Google Scholar] [CrossRef]
- Roy, G.; Tremblay, G. Polarimetric Multiple Scattering LiDAR Model Based on Poisson Distribution. Appl. Opt. 2022, 61, 5507. [Google Scholar] [CrossRef]
- Knapp, N.; Fischer, R.; Huth, A. Linking Lidar and Forest Modeling to Assess Biomass Estimation across Scales and Disturbance States. Remote Sens. Environ. 2018, 205, 199–209. [Google Scholar] [CrossRef]
- Qu, Y.; Shaker, A.; Korhonen, L.; Silva, C.A.; Jia, K.; Tian, L.; Song, J. Direct Estimation of Forest Leaf Area Index Based on Spectrally Corrected Airborne Lidar Pulse Penetration Ratio. Remote Sens. 2020, 12, 217. [Google Scholar] [CrossRef]
- Pang, S.; Li, G.; Jiang, X.; Chen, Y.; Lu, Y.; Lu, D. Retrieval of Forest Canopy Height in a Mountainous Region with ICESat-2 ATLAS. For. Ecosyst. 2022, 9, 100046. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, L.; She, G. Estimating Forest Structural Parameters Using Canopy Metrics Derived from Airborne Lidar Data in Subtropical Forests. Remote Sens. 2017, 9, 940. [Google Scholar] [CrossRef]
- Zhong, H.; Zhang, Z.; Liu, H.; Wu, J.; Lin, W. Individual Tree Species Identification for Complex Coniferous and Broad-Leaved Mixed Forests Based on Deep Learning Combined with Uav Lidar Data and Rgb Images. Forests 2024, 15, 293. [Google Scholar] [CrossRef]
- Swatantran, A.; Tang, H.; Barrett, T.; DeCola, P.; Dubayah, R. Rapid, High-Resolution Forest Structure and Terrain Mapping over Large Areas Using Single Photon Lidar. Sci. Rep. 2016, 6, 28277. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Parameter | Indicator/Value | Remarks |
|---|---|---|---|
| Satellite Basic Information | Launch Date | 15 September 2018 | |
| Operating Agency | NASA | ||
| Design Life | 3 years | Still operational as of 2024 | |
| Orbit Type | Near-polar sun-synchronous | ||
| Orbit Altitude | ~496 km | ||
| Orbit Inclination | 92° | ||
| Revisit Period | 91 days | ||
| Payload (ATLAS) | Laser Wavelength | 532 nm (green light) | |
| Laser Pulse Frequency | 10 kHz | 10,000 laser pulses per second | |
| Number of Beams | 6 beams | 3 beam pairs, each with a strong and weak beam | |
| Beam Pair Spacing (Across-track) | ~3.3 km | ||
| Beam Spacing Within Pair | ~90 m | ||
| Vertical Accuracy | <10 cm | Depends on terrain and system calibration | |
| Footprint Size (Ground) | ~17 m | Diameter of each laser spot | |
| Data Product Parameters | Along-track Resolution | ~0.7 m | At single photon level |
| Vertical Resolution | Sub-meter (<1 m) | ||
| Data Coverage | Global | Emphasis on polar regions, oceans, and land | |
| Data Update Frequency | Every 3 months | Updated global coverage of major areas | |
| Key Performance Indicators | Terrain Elevation Measurement Accuracy | Ice Surface: <4 cm; Land Surface: <5 cm; Sea Surface: <2 cm | Depends on surface type and atmospheric conditions |
| Vegetation Canopy Penetration | Yes | ||
| Data Product Format | HDF5 | Includes latitude, longitude, elevation, timestamp, etc. |
| Scenario | Bias/m | MAE/m | RMSE/m |
|---|---|---|---|
| Strong | −0.53 | 2.03 | 3.34 |
| Weak | 0.19 | 4.54 | 7.20 |
| Day | −0.12 | 2.40 | 4.03 |
| Night | −0.82 | 2.07 | 3.39 |
| Strong and day | 0.03 | 2.65 | 4.92 |
| Weak and night | −1.97 | 3.93 | 7.34 |
| Weak and day | 5.29 | 8.04 | 10.54 |
| Strong and night | −0.74 | 2.33 | 4.18 |
| Scenario | Bias/m | MAE/m | R2 | RMSE/m | %RMSE |
|---|---|---|---|---|---|
| Strong | −1.22 | 4.19 | 0.57 | 6.2 | 47.7% |
| Weak | −1.02 | 5.27 | 0.33 | 7.70 | 58.5% |
| Day | −1.72 | 4.84 | 0.40 | 6.98 | 54.9% |
| Night | −0.66 | 3.84 | 0.53 | 5.82 | 44.0% |
| Strong and day | −1.62 | 4.81 | 0.42 | 6.95 | 53.5% |
| Weak and night | −0.23 | 5.31 | 0.30 | 7.85 | 56.5% |
| Weak and day | −2.23 | 5.20 | 0.29 | 8.37 | 63.0% |
| Strong and night | −0.62 | 3.59 | 0.56 | 5.41 | 41.7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, L.; Shu, Q.; Xia, C.; Li, Z.; Zhang, X.; Zhang, Y. ICESat-2 Performance for Terrain and Canopy Height Retrieval in Complex Mountainous Environments. Remote Sens. 2025, 17, 1897. https://doi.org/10.3390/rs17111897
Fu L, Shu Q, Xia C, Li Z, Zhang X, Zhang Y. ICESat-2 Performance for Terrain and Canopy Height Retrieval in Complex Mountainous Environments. Remote Sensing. 2025; 17(11):1897. https://doi.org/10.3390/rs17111897
Chicago/Turabian StyleFu, Lianjin, Qingtai Shu, Cuifen Xia, Zeyu Li, Xiao Zhang, and Yiran Zhang. 2025. "ICESat-2 Performance for Terrain and Canopy Height Retrieval in Complex Mountainous Environments" Remote Sensing 17, no. 11: 1897. https://doi.org/10.3390/rs17111897
APA StyleFu, L., Shu, Q., Xia, C., Li, Z., Zhang, X., & Zhang, Y. (2025). ICESat-2 Performance for Terrain and Canopy Height Retrieval in Complex Mountainous Environments. Remote Sensing, 17(11), 1897. https://doi.org/10.3390/rs17111897