1. Introduction
Tidal estuaries/zones, like the Solway Firth on the West Coast of Great Britain, are some of the most dynamic coastal environments in the world. The rapidly changing conditions, driven by tides and currents, create an unpredictable environment that present a range of hazards such as strong currents, rapidly changing water levels, and quicksand. Consequently, they remain uncharted or inaccurate in traditional marine charts (
Figure 1). In lieu of charts, rescue services operating in these regions rely on specialised vehicles, local knowledge, and regular depth readings to navigate safely amidst the dynamic shifting sands. This experience is enhanced by coordination and communication with neighbouring rescue services and coast guards. This paper aims to chart the uncharted by providing a technique to map the latest location of navigable channels of water—referred to as tidal channels—supporting rescue services and enhancing our understanding of these unique environments.
Remote sensing, specifically satellite Earth observation (EO), provides the ability to access recent imagery of tidal zones. When these images are acquired in close proximity to low tide, it is possible to identify the deepest channels that cut through the sand, rock, and mud that form tidal flats [
3]. Visual imagery can clearly identify these tidal channels through the use of the Normalised Difference Water Index (NDWI) [
4,
5]. However, optical imagery can be obscured by clouds where, for an area like Great Britain, this can result in a significant proportion of images being unusable [
6]. This becomes a prohibitive restriction for a task that is already constrained by the need to use low-tide optical imagery. Satellite-based Synthetic Aperture Radar (SAR) imagery is not obscured by cloud or fog and can be effective in detecting tidal channels by using the surface differences detected in the radar signal [
5,
7]. There is still often a need to use low-tide imagery to clearly distinguish tidal channels, although evidence does exist for the ability of SAR to identify tidal channels during both ebb and flood [
7]. SAR has been shown to distinguish sediment type and vegetation in tidal environments [
8,
9], as well as support optical imagery, in monitoring tidal flats by correcting occluded regions [
10], and in combination with optical imagery and deep learning, to classify of intertidal zones—in terms of tidal flat and ocean water [
11]. Satellite-acquired SAR imagery has been highlighted as one of the most effective and suitable technologies for monitoring tidal zones [
12]. We aim to demonstrate the ability of SAR to independently detect tidal waters flowing through tidal flats by understanding the different SAR representations of water and sediment in intertidal zones.
Satellite-based SAR penetrates through clouds but is still susceptible to the influence of the weather. The data generated from SAR signals contain both the backscatter coefficient— a measure of the amount of radar energy reflected back to the sensor—and polarimetric data—a measure detailing the polarisation of the returning radar waves. Ideal conditions, for the SAR monitoring of tidal flats, are characterised by a smooth water surface resulting in a lower backscatter coefficient compared to the surrounding land surfaces. As a result, ideal conditions are likely associated with calm weather conditions, because high winds disturb the water surface and can significantly alter the backscatter signal to such an extent that water is no longer readily distinguishable from land [
13]. The influence of wind and tide is implicitly acknowledged in [
11] where they are provided as inputs to the deep learning model, while in [
14], the direction of wind has been explicitly used to identify submerged tidal features. Other studies choose to discard SAR images that are acquired in high wind conditions to avoid consideration of these disturbances [
15]. However, discarding imagery is impractical for the purposes of detecting safe-to-navigate channels as the data available are already limited by the requirement that they must be collected in close proximity to low tide. Furthermore, timeliness of data is important. In our work, we must understand and account for the impacts of weather conditions in the acquired SAR imagery to enable the detection of safe-to-navigate channels in all weather conditions.
Identifying paths that safely navigate tidal channels from SAR imagery is part of this paper’s contribution. Ship routing algorithms often consider safe navigation, including obstacle and ship avoidance, where bounding box cells that define an area around a ship or obstacle are frequently employed [
16,
17]. Cells in our work are defined by the pixel resolution of the satellite imagery, where a breadth-first search (BFS) is applied to solve the maze-like problem of finding a route through the tidal flats. BFS treats the maze of adjacent cells as a graph, where this approach is among the most robust and effective graph-based maze solving methods for larger mazes [
18]. The task of solving the tidal channel maze in ideal conditions with BFS is relatively trivial, with the focus of research on path identification with known obstacles focused on optimised and efficient variants of BFS [
19]. The contribution of this work lies in the identification of tidal channel water and hence the avoidance of obstacles (i.e., tidal flats) that restrict the routes open to BFS exploration. The task is made more difficult due to the variation in SAR imagery seen during this study. The study of SAR variation contributes to an improved understanding of how SAR imagery can vary over tidal zones depending on weather and tidal conditions, resulting in new insights into tidal flat variation.
2. Methods—SAR Data
In this work, we focus on the use of the backscatter coefficient from the SAR signal to distinguish water channels from surrounding mud and sand. Specifically, the VV polarisation (vertical transmit and vertical receive) data from Sentinel-1 is sensitive to surface roughness, and hence can be used to readily distinguish water from mud and sand in ideal conditions to provide detailed maps of the tidal zone around low tide. The SAR images used in this work are provided by Copernicus within the Google Earth Engine (GEE) data catalogue [
20]. This dataset underwent various preprocessing steps, such as orbital metadata updates, ground-range-detected boundary noise and thermal noise detection, radiometric calibration, and terrain correction to generate geocoded backscattering intensity images. These images are then converted to decibels (dB) and uploaded to the Google cloud, where they can be accessed in near-real-time by users. Using GEE’s platform, we applied a clipping to the images to only select relevant pixels within our region of interest, which encompasses parts of the river Nith and its outflow into the Solway Firth. The GEE script is available at [
21]. Finally, a median filter is applied to the image to mitigate against the impact of speckle.
The SAR incidence angle is reported by GEE and varies over the region of interest; the incidence angle recorded for analysis is taken as the mean of all angles covering the region of interest.
2.1. VH Polarisation Mask
VH polarisation (vertical transmit and horizontal receive) data are also available from Sentinel-1. VH data are sensitive to the dielectric constant (relative permittivity)—a measure of the ground’s ability to store electrical energy in an electric field. The VH signal can be used to distinguish permanent coastal land from the tidal zone such that the land can be masked from the VV backscatter image. A land mask is a necessary step when detecting channel paths in certain weather conditions, as described in
Section 3.2, where the tidal channel and permanent land can present similar VV polarisation intensities. VH data provide a simple and reliable mask for removing prominent dry areas of land. Standard land masks are available but, due to the resolution and accuracy of these, they can overlap with the tidal zone. For instance, applying the land/water mask algorithm [
22] from the SNAP toolbox [
23] produces overlap with the tidal zone and masking of the tidal channel at points of close approach to the land/tidal zone boundary. It is possible for the VH polarisation intensity mask to cover small areas of the tidal zone. These areas of high VH intensity appear to correspond with areas of high VV intensity, likely attributed to areas of sand/mud with increased surface roughness due to strong hydro-dynamic forces in that area [
24]. These masked areas therefore do not represent tidal channels and instead contribute to the channel path’s avoidance of tidal flats.
2.2. Satellite Data Availability
The Sentinel-1 mission consisted of two identical satellites in near-polar sun-synchronous orbits with a 180 deg orbital phase difference. They were equipped with C-band SAR capable of collecting data at a variety of resolutions. For our purposes, the Interferometric Wide swath (IW) mode, which has a resolution of 5 m (range) × 20 m (azimuth), is used [
25]. The two-satellite constellation offered a 6-day exact repeat cycle at the equator. Since the orbit track spacing varies with latitude, the revisit rate is greater at higher latitudes than at the equator. On 23 December 2021, one of the spacecraft, Sentinel-1B, suffered an anomaly and has not returned data since this date [
26]. Sentinel-1C, which should replace this lost service, is due to be launched soon [
27].
The area selected for investigation in this paper is a portion of the Solway Firth on the West Coast of Great Britain. The region selected extends from 55.01°N, 3.60°W (top left) to 54.92°N, 3.49°W (bottom right) as shown in
Figure 2.
To assess the availability of suitable satellite imagery for coastal monitoring, the data available from Sentinel-1 are investigated for a 12-month period from 01/01/2021 to 31/12/2021. It is necessary to select images at sufficiently low tide height to accurately identify the location of tidal channels. When the tide height increases, areas of sand and mud become submerged to the point that an SAR image cannot clearly discern the tidal channels. For the year 2021, 111 images were collected that were visually determined to provide sufficient clarity on the location of tidal channels. Sufficient clarity is a subjective measure based on the ability to identify a clear, narrow, channel throughout the image. This assessment will be affected by weather conditions at the time of the image, but the following analysis reveals that it is predominantly a consequence of tidal conditions.
The 111 images of sufficient clarity were compared with tide heights recorded at the time of image collection. The tide height recorded around 30 km south of the tidal channel at Workington Station (54.65°N, 3.57°W) was obtained from the British Oceanographic Data Centre (BODC) [
28]. For 2021, the mean tide height was 4.5 m where the highest tide height recording for the 111 images, deemed to be suitable for channel identification, was 4.46 m. A similar review of tidal heights in the same area of the Solway Firth for February–August 2022 identified 4.2 m as the maximum tide height for usable imagery [
12]. While this does indicate that all usable images were acquired below mean tide, it is a misleading measure given the displacement from Workington station and the geography of the Solway Firth, both of which delay the arrival of tides. For tides that were ebbing at the time of image collection, the maximum tide height was recorded at 2.95 m, which is likely to be a more representative maximum for tide height for the area shown in
Figure 2.
The Sentinel-1 satellites each provide four observation opportunities of the area of interest every 12 days. Each pass occurs at approximately 6:30UTC or 18:00UTC and the 12-day pattern repeats predictably such that, until the failure of Sentinel-1B, the two spacecraft combined provided a 6-day repeat cycle. Manually filtering the images according to sufficient-clarity criteria results in 111 images with a median coverage separation of 1 day and a maximum separation of 15 days; 10% of sufficient clarity images were separated by 10 days or greater while 67% of sufficient-clarity images fell within 2 days of the previous sufficient-clarity pass.
2.3. SAR Tidal Channel Dataset
The tidal channel detection algorithm only requires a subset of the available 111 sufficient-clarity images to generate channel paths throughout 2021. This subset of images were not selected primarily on quality but prioritised on providing a weekly coverage, where possible, of the tidal channel. While some images recorded on consecutive days remain, the majority were removed to produce a subset of 60 images that maintain a median time between images of 3 days and a maximum of 20 days; 17% of the 60 images were separated by 10 days or greater while only 25% fell within 2 days of the previous chosen image. These results suggest a clustering of images, with a similar observation for this area observed during February–August 2022 with, on average, two usable images per cluster separated by a gap of approximately 10 days, resulting in 5–8 low-tide images per month [
12].
3. Methods—Detecting Tidal Channel Paths
Tidal channels form within a tidal flat as a product of the rise and fall in the tide, as well as the influence of continuous flow from rivers entering a tidal flat. The main tidal channels connecting river outlets to the sea provide important routes between well-established rivers and the consistent deep waters of the sea. In relation to the region of interest in this work, detecting the tidal channel is vital for the Nith Inshore Rescue as it connects their lifeboat station on the River Nith to the Solway Firth. Every deployment from their base in Glencaple requires the navigation of this channel to safely attend incidents in the Solway Firth and beyond.
The navigable tidal channel is visible on SAR imagery for suitably low-tide images (see
Section 2.2). Both of the examples in
Figure 3 provide sufficient clarity for the tidal channels, but the presentation of the tidal channel varies notably.
Figure 3a presents a typical representation of tidal channels near low tide during ideal conditions.
Figure 3b captures how the SAR presentation varies in other conditions, such as high winds that are known to increase water surface roughness.
Section 3.1 and
Section 3.2 introduce a procedure for identifying tidal channels, irrespective of weather conditions, by using knowledge of previous channel paths. The implementation of the algorithms described here are available at [
29], alongside the identified channel paths for the 2021 dataset.
3.1. Ideal Conditions
In this work, ideal conditions are defined as those whereby the tidal channel comprises the lowest-intensity pixels in the VV image, as seen in
Figure 3a. An image in ideal conditions presents as the simplest scenario for identifying a channel path. Here, we describe a simple approach for generating a reference path from an image in ideal conditions. This path also acts as a reference for a more robust approach in detecting the channel path in all conditions; this more robust approach is presented in the following section.
To detect a reference path, an SAR image must meet the following two requirements: (1) there exists a tidal channel that connects the start and end coordinates; (2) the lowest-intensity pixels in the image are those that represent a navigable tidal channel. The reference path is identified, as described in
Figure 4, by finding the minimum threshold range that enables a path of contiguous traversable pixels to connect the start and end coordinates. This path detection relies on a breadth-first search (BFS) [
18] where a network of contiguous pixels (vertically or horizontally adjacent), below the defined threshold, are identified for a specified start point. The BFS therefore defines a reachable set of pixels, from which it is possible to check if the end point can be reached. When a path is found by the BFS, the search ends and that path is returned as the reference path for use in the following
All conditions algorithm.
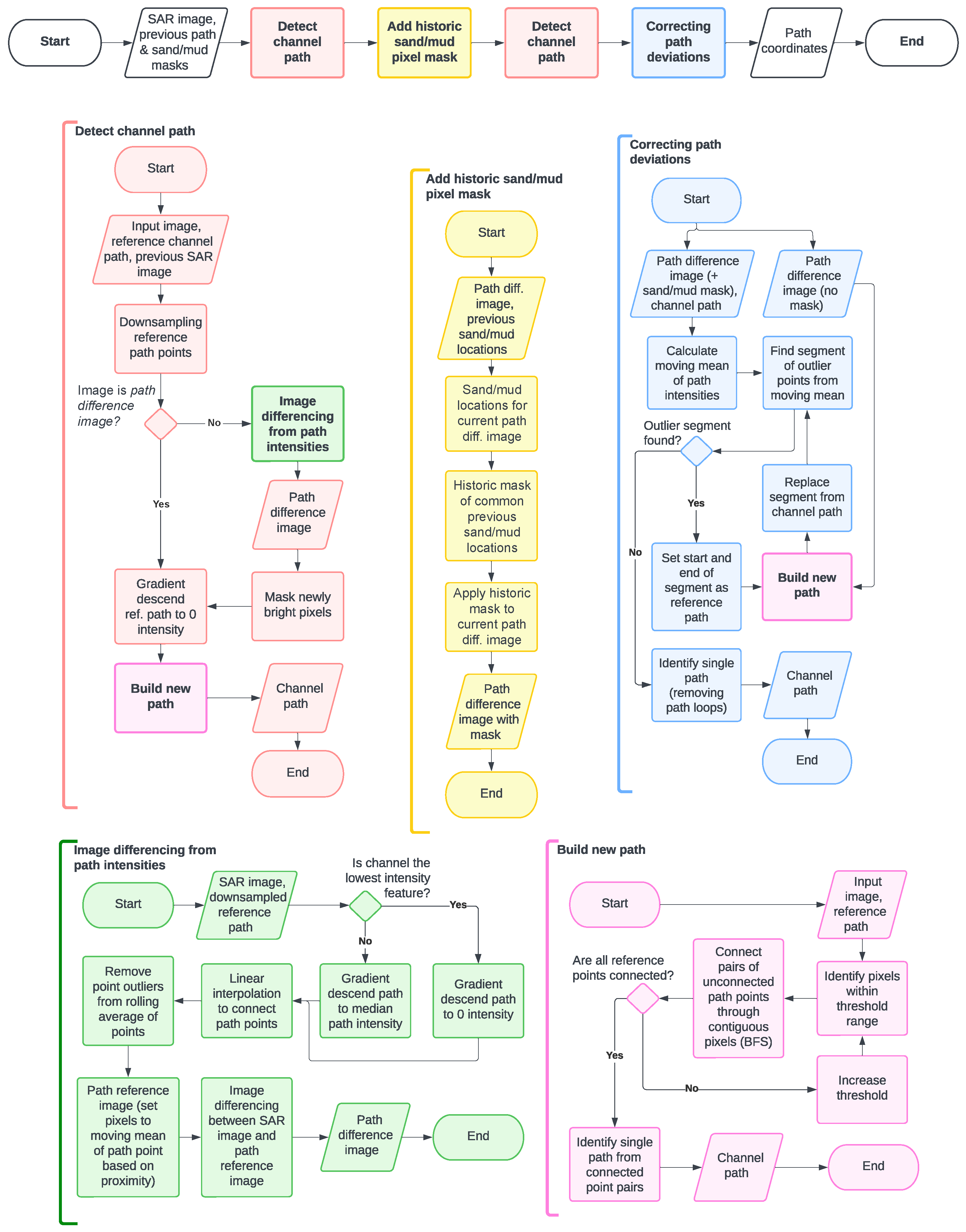
3.2. All Conditions
In reference to the 2021 dataset of 60 SAR images, less than half of these would be suitable for the assumptions described for ideal conditions. This necessitates a robust channel detection algorithm for all conditions, presented in
Figure 5, which relies on a memory of the previous channel path and knowledge of historic sand/mud locations. This algorithm operates with the assumption that the majority of the channel will be similarly located as in the previous image. This assumption is supported by the demonstrated efficacy of the algorithm, where the time between images is a matter of days: the 60 images in the 2021 dataset have a median separation of 3 days and a maximum of 20 days (see
Section 2.3).
An overview of the algorithm is displayed in the top of
Figure 5 and summarised as follows:
A channel path is detected (
Detect channel path—
Section 3.2.2) based on the previous path and a manipulated SAR image, referred to as a
path difference image (
Section 3.2.1).
This initial channel path is then updated to account for historic sand/mud locations (
Add historic sand/mud pixel mask—
Section 3.2.4) such that the path avoids high-risk locations that have frequently been sand or mud.
This updated channel path is edited to reroute any segments that overlay sand or mud in the current image (
Correcting path deviations—
Section 3.2.5).
The final step enables newly formed channels to be detected that traverse historical sand/mud areas. Again, we note that this approach requires knowledge of recent channel path locations. In the absence of previous path information, a reference path can either be defined for the current SAR image if it has been taken in ideal conditions using the algorithm in
Section 3.1, or manually defined with a set of coordinates.
3.2.1. Path Difference Image
Due to the variation in tidal channel presentation in SAR images, based on conditions at the time of capture (see
Figure 3), the creation of a
path difference image, where the lowest-intensity pixels characterise the tidal channel, attempts to standardise the presentation of the tidal channel. This manipulated version of the SAR image is created by identifying the points from a reference path that likely represent the current channel and adjusting the image pixel intensities such that these channel points are the lowest-intensity pixels (i.e., emulating the appearance of the tidal channel in ideal conditions).
The first step when creating a path difference image is to identify whether the channel is the lowest-intensity feature in the image. In ideal conditions, the low-intensity pixels that form the tidal channel can be identified as the lowest-intensity peak in the pixel intensity distribution. In non-ideal conditions, the pixel intensities of the tidal channel can be notably higher than the lowest peak that is instead associated with the surrounding sand/mud. Such an example is shown in
Figure 6, where the mean reference path intensity is notably higher than the lowest-pixel-intensity peak, which is associated with areas of sand/mud either side of the channel.
An important step in characterising the tidal channel is to check if the channel—as identified by the reference path—is associated with the lowest-intensity feature of the SAR image. This decision determines how the gradient descent is applied to the reference path. Gradient descent—an iterative optimisation algorithm used for finding the minimum of a function [
30]—moves all reference path points towards either the lowest-intensity local minima for an ideal-conditions image or towards the median path intensity value when non-ideal conditions have been detected. For both cases, image smoothing and gradient descent are applied to move reference path points away from high-intensity features (e.g., sand banks) and towards the centre of low-intensity areas.
Following the gradient descent step, the downsampled reference path is upsampled by connecting each pair of path points with a straight line of evenly spaced points. This new reference path is then filtered to remove pixel intensity outliers as displayed in
Figure 6. These outliers are identified as points outside of the standard deviation for the rolling average of the intensity. The rolling average varies with the length of the reference path, beginning at the start point and including previous points up to a quarter the length of the total reference path. The size of the rolling average provides a compromise between stability and allowing for intensity values to vary along the length of the channel. This rolling average also ignores any points with pixel intensities outside of the standard deviation for the previous points considered. In this way, an extended segment of the path overlaying sand/mud will not increase the rolling average. This is only an effective strategy if there is confidence that the initial path points lie on the river/tidal channel. In this paper, the channel path is considered to begin where the river meets the tidal flats; therefore, the initial stretch of channel is not prone to variation.
The remaining reference path points—those that were within one standard deviation of the rolling average—are then used to create a
path reference image. This image assigns every pixel an intensity value that is equal to the closest reference path point. The absolute difference between the source SAR image and this
path reference image produces a
path difference image where the channel is characterised by the lowest-intensity pixels. The absolute difference is used as the sand/mud adjacent to the tidal channel can appear with lower or higher intensity than the channel depending on conditions. A path difference image is displayed in
Figure 6c, where the source SAR image is shown in
Figure 6a.
3.2.2. Detect Channel Path
The input to detecting the channel path is an input image, reference channel path, and the previous
path difference image. The reference path is downsampled such that an evenly spaced subset of points are used to generate a new channel path. The source SAR image has to be manipulated as described in
Section 3.2.1 to produce a
path difference image.
A comparison with the most recent previous
path difference image can reveal areas of notable intensity increase (i.e., newly bright pixels in
Figure 5), as pixels representing the channel should be consistently low-intensity regardless of conditions. Areas with a large recent increase in intensity can represent a change from a deep water channel to a sandbank and are therefore masked (setting their pixel values to the highest intensity) to facilitate the route in avoiding emerging hazardous regions.
The final step before building a new channel path is to perform gradient descent on each reference path point, such that the points are moved towards a local pixel intensity minimum. At this stage, the reference path is supplied to
Build new path (
Section 3.2.3) to produce a channel path that follows a tidal channel from the river out to the estuary.
3.2.3. Build New Path
Building a new path from a reference path requires an input path difference image. A threshold is then applied, such that only pixels with intensity values equal to or less than the threshold value are included as navigable when constructing a path. The threshold is initially minimal, such that only the lowest pixel intensities remain. A new path is constructed by connecting the points on the reference path using navigable pixels. For each unconnected reference path point, an attempt is made to connect it to a downstream point (starting with the closest downstream point) through a contiguous (vertically or horizontally adjacent) set of pixels. If, after attempting to connect all reference path points, there remains unconnected points then the threshold is increased and the process repeats.
After each attempt to connect reference path point pairs with a path segment, the reference points are reviewed for removal. All reference points that lie between the beginning and end of a newly created path segment are removed, as this new section bypasses them. In addition, each fully connected reference point is removed. The definition for a fully connected point is that it is both the origin for a path segment and the destination for a separate path segment. The start and end points of the reference path are exempt from this requirement as they will only ever act as an origin or destination, respectively.
Once all pairs of remaining reference points have been connected through a contiguous pixel path found with a breadth-first search (as in
Section 3.1), a single path from the start to end reference points is identified. This single path removes redundant path segments (e.g., loops) and disconnected path segments from the channel path. It is again found using a breadth-first search applied from start to end points.
Note that this is distinct from the creation of a reference path, displayed in
Figure 4, where there are only two reference points to connect, namely, the start and end points of the path.
3.2.4. Add Historic Sand/Mud Pixel Mask
Sand/mud locations are identified from the path difference images using a single threshold value, where lower-intensity pixels have a similar backscattering coefficient to the nearest reference channel path point (as defined in
Section 3.2.1). The threshold value is empirically defined as 7.8 dB, which is a conservative threshold (see
Figure 6b), including pixels that are likely to represent sand or mud in the tidal flat.
The sand/mud locations identified in the current image are considered alongside those detected in previous images to detect common historic sand/mud locations. For this work, the previous four images were used for this process of historic sand/mud identification. Due to the relative regularity of SAR image collection for the target region in the Solway Firth, these four historic images equate to a relatively consistent time window of around one month prior to the current image. If a pixel is more often sand/mud than water in these five images (four historic, one current), then a mask is applied to that pixel. An example
path difference image is shown in
Figure 6c,d, which shows the same image after applying a historic sand/mud pixel mask. In this example, the first channel path traverses regions that were historically sand/mud. The channel path identification algorithm (see
Figure 5) creates this initial channel path, before adding the historic sand/mud pixel mask and recalculating a channel path (sand/mud mask channel path in
Figure 6) that avoids historic sand/mud areas.
3.2.5. Correcting Path Deviations
A moving average (mean) of the channel path intensities is calculated [
31] for the
path difference image with historic sand/mud mask to find path segments of outlier points (i.e., intensities outside of one standard deviation of the moving average). Each outlier segment is replaced by taking the start and end points of the segment as reference points, for building a new path (
Build new path—
Section 3.2.3) based on the
path difference image without the sand/mud mask applied. This process enables new channels to be found that were not historically navigable, due to mud and sand, as identified by the historic sand/mud mask. The example in
Figure 6e displays only a minor adjustment when creating the final channel path.
3.3. Validating SAR Images
Channel paths were followed and depth measurements were taken around them by the Nith Inshore Rescue team on the 28 February 2021 and the 26 July 2022. The team took depth measurements at different points along the channel paths, created using the method presented in
Section 3.2. These measurements were taken with a Raymarine RV100 sonar transducer with the depths reported on a touchscreen (Axiom MFD) alongside a visualisation of the boat’s position according to GPS.
Figure 7 presents the results for the depth tests, superimposed on SAR images acquired on the day of test. Note that each SAR image was taken from the day of the test, but at a lower tide height than when the team performed measurements. The depth recordings support our visual interpretation of the SAR images, where deeper locations match with the channel path and the shallow locations are associated with brighter areas of the image that we associate with raised sand/mud banks.
The depth measurement locations on the 28 February 2021 are associated with exact GPS positions, while the locations on the 26 July 2022 were approximated from recordings of the onboard navigation touchscreen.
The results of these tests support the accuracy and relevance of the SAR imagery in determining channel height, where the lowest depths correspond with high-intensity pixels in the SAR image. The depth measurements close to the channel path are generally the deepest, with the channel seen to become deeper the further away from the river feeding into the tidal channel.
6. Nith Inshore Rescue Application
Historically, Nith Inshore Rescue would rely on periodic depth measurements along their route from Glencaple out towards the Solway Firth, aided by visual inspection of channel positions at low tide. Their lifeboat is fitted with a Raymarine sonar system and chartplotter; the former provides depth measurements and the latter is able to record previous routes, as well as upload routes in the form of the GPS Exchange Format (GPX).
The presented technique is implemented by Nith Inshore Rescue by first acquiring the latest satellite-based SAR imagery in low-tide conditions. A safe passage channel path is generated using the described technique and overlaid on the image, allowing the team to visually review the proposed path before uploading it to the Raymarine chartplotter in a GPX format. The Raymarine system provides a heading towards each waypoint along a route depicting the best navigational channel that, when following the route, automatically updates upon close approach to provide a heading to the next and subsequent waypoints. To avoid continuous navigation updates, a downsampled set of waypoints are provided with at least 30 times larger spacing than the waypoints in the full channel path. In addition, the sequence of waypoints are visualised on the digital nautical chart to advise on the channel location such that the Nith Inshore Rescue can use this insight in combination with knowledge of the area, current tides, and known hazards to pick and choose which waypoint in the sequence to head to next both for safety and best speed; hence, the waypoints are often not followed in a linear sequence from start to end.
The visual assessment of the channel paths included in the
supplementary materials highlights the occurrences of close approaches to the channel banks where the rescue team would likely use their local knowledge and judgement to determine whether they follow the path exactly.
7. Discussion
Detecting visually accurate channel paths over a year demonstrates the efficacy of using readily available SAR imagery to find tidal channel paths, providing sufficiently frequent and unobscured imagery to monitor a dynamic tidal zone environment. There are still challenges associated with using SAR imagery. These include variations between images in different conditions and variations within images that disguise the boundaries between channel and sand, due to factors such as wind, turbulent water flow, and wet sand/mud. The path detection algorithm, presented herein, supports path routing in variable SAR images by relying on previous knowledge of the channel location. As a result, the algorithm is at greatest risk to produce errors following a series of images where there is reduced clarity between tidal zone features, which consequently reduces the reliability of the sand/mud mask used to indicate areas of sand/mud in previous images. This paper demonstrates the efficacy of this approach, where knowledge of previous sand/mud locations enables accurate channel path detection for 60 images separated by a median period of 3 days up to a maximum of 20 days (see
Section 2.3). This represents an improvement in the accuracy and the number of images that can be used for path generation, over similar methodologies that do not apply image and path correction steps.
High wind shear is known to affect water’s presentation in SAR imagery [
13]. In addition, wind can generate waves of comparable size to the wavelength of the SAR signal, known as Bragg waves, that lead to strong backscatter signals. However, the influence of wind on sand flats has not been similarly acknowledged where previous work found no influence on sand flat presentation with SAR [
9]. We found a clear correlation in flood phase (
), but no relationship between wind speed and tidal flat presentation in the ebb tidal phase (
). It is possible that the wind’s influence on SAR imagery for the region of interest here is due to the transportation of water spray from tidal channels. The lack of correlation in the ebb phase is potentially due to the greater saturation of water in sand/mud areas that, due to recent submersion, diminishes the influence of wind speed.
By identifying channel paths over a year, this work supports our understanding of these channels by demonstrating an expected relationship between periods of high river flow and changes in the tidal channel. Specifically, periods of high river flow are responsible for step changes in the shape of the channel. The role of river flow in shaping tidal channels and transporting sediment has been studied for similarly dynamic tidal environments [
35,
36]. Tidal channels are continuously shifting, with the risk that the channel path no longer accurately maps the current tidal channel increasing with the time since image collection. But this risk notably increases following a high river flow, which usually follows a period of heavy rainfall or snow melt. These are relationships that are expected, but the work of this paper provides the tools to track these changes and improve the safety of those operating in intertidal zones. This is research of particular importance to our collaborators Nith Inshore Rescue who have provided informal feedback on the channel paths routinely provided to their team as well as completing formal validation exercises as captured in
Figure 7.





 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}