
AMFNet: Attention-Guided Multi-Scale Fusion Network for Bi-Temporal Change Detection in Remote Sensing Images


Abstract
1. Introduction
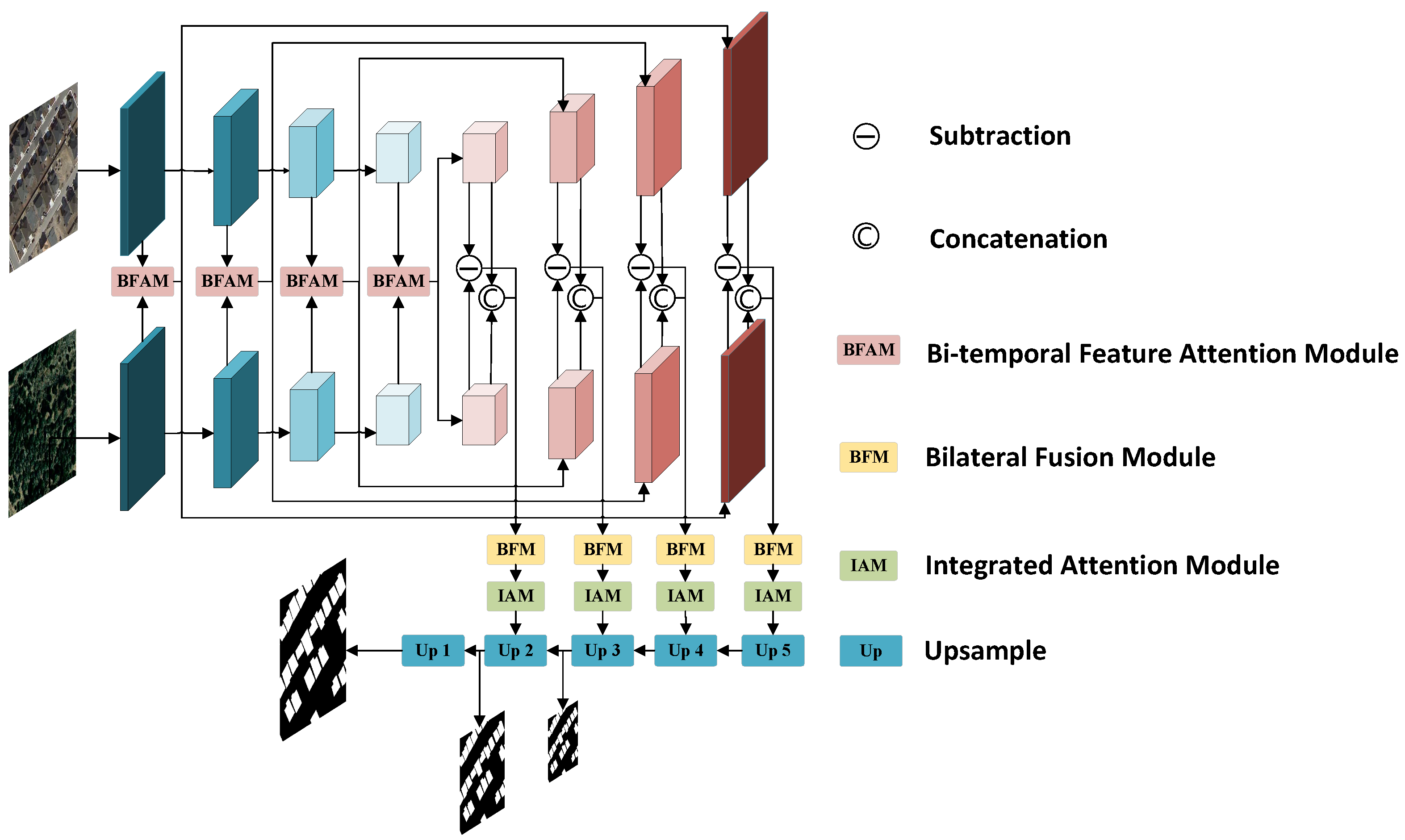
- We propose an attention-guided multi-scale fusion network (AMFNet) for change detection in high-resolution remote sensing images. The network makes full use of the abundant features of remote sensing images and optimizes feature interaction and semantic information fusion through an attention mechanism, effectively addressing issues of uncertain target edges and omissions.
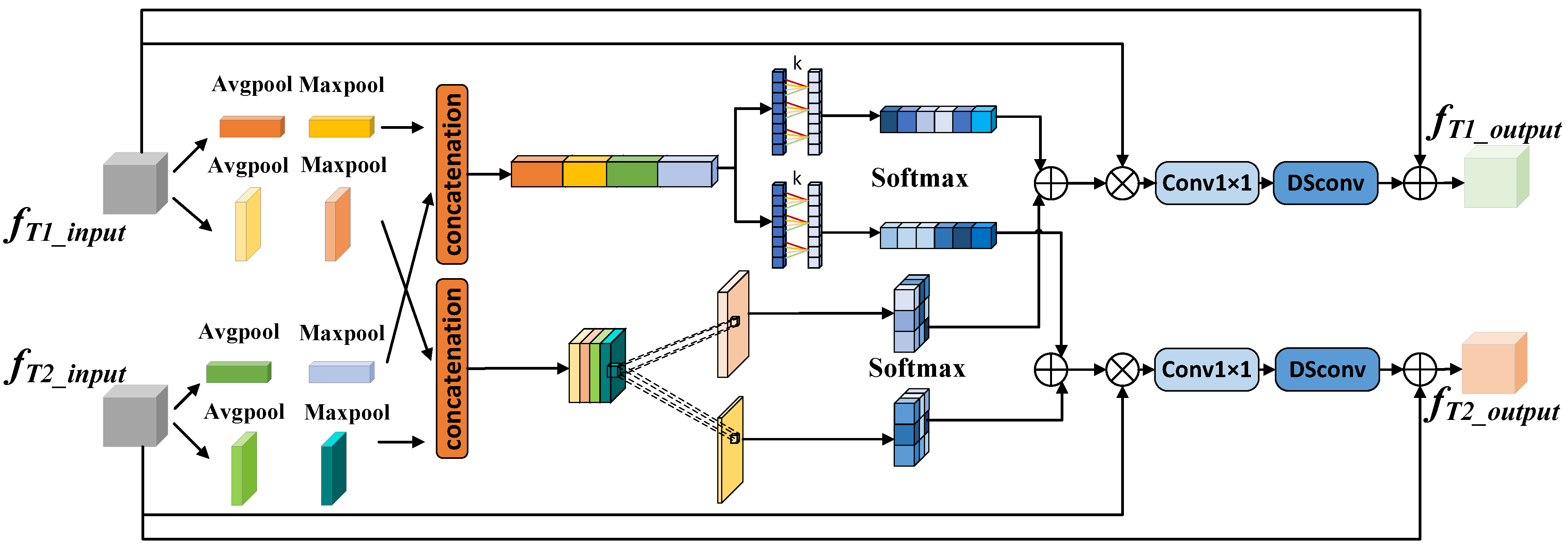
- We propose the bi-temporal fusion attention module (BFAM) and bilateral fusion module (BFM). BFAM can combine channel and spatial attention mechanisms and utilizing temporal information. BFM extracts the differential and global information of bi-temporal features, better pinpointing detailed features and texture characteristics, achieving complementary of information between the two branches.
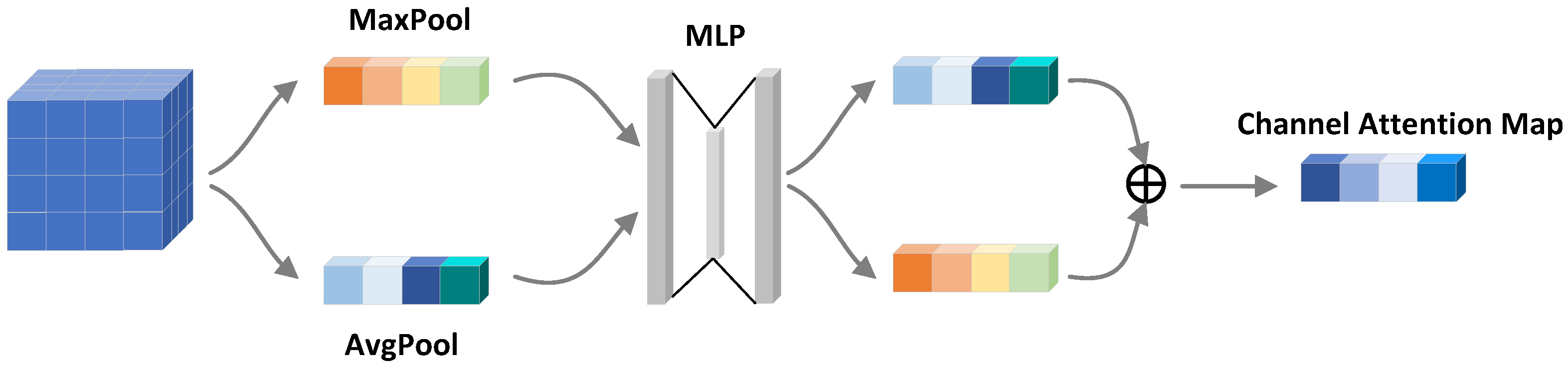
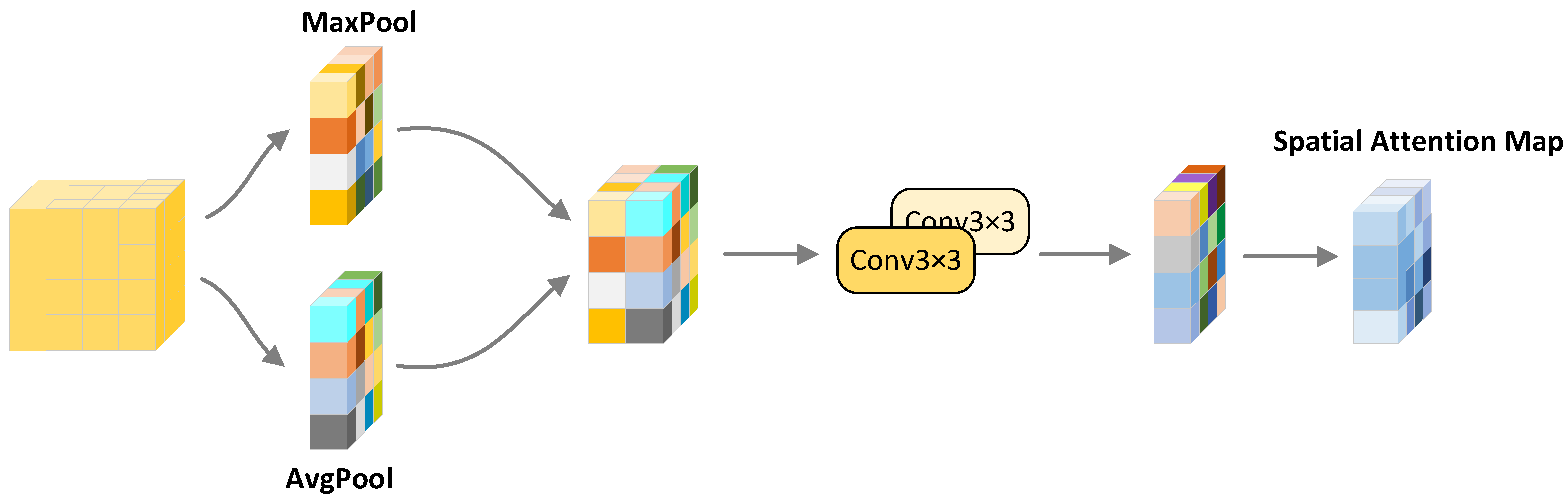
- The integrated attention module (IAM) is introduced to allow the network to identify diverse features across spatial and channel dimensions while eliminating and reducing redundant features. It extracts the changing regions as positions with high feature weights, thereby enhancing the network’s detection accuracy.
- Our AMFNet, as shown by comprehensive testing on two datasets for remote sensing image change detection, achieves both robustness and superior accuracy, outperforming other deep learning change detection methods.
2. Materials and Methods
2.1. Proposed Approach
2.1.1. Network Structure
2.1.2. Bi-Temporal Feature Attention Module
2.1.3. Bilateral Fusion Module
2.1.4. Integrated Attention Module
2.2. Datasets
2.2.1. SYSU-CD
2.2.2. LEVIR-CD
2.2.3. GZ-CD
2.3. Implementation Details
2.3.1. Evaluation Metrics
2.3.2. Multi-Scale Deep Supervised Training
3. Experiment and Results
3.1. Experimental Details
3.2. Ablation Experiments on LEVIR-CD
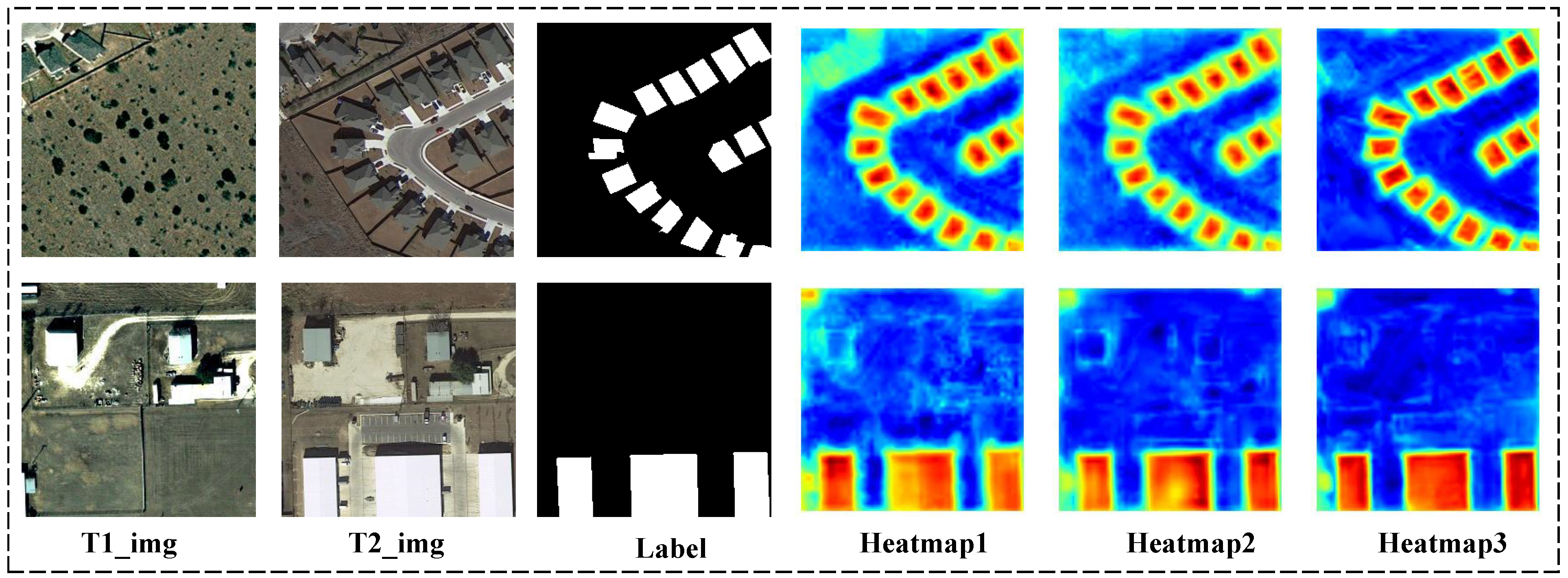
- Ablation experiments of BFAM: We propose the attention-guided BFAM module, which effectively incorporates temporal dynamics into the feature fusion process at both channel and spatial dimensions. This module enhances IoU and F1 scores by 0.78% and 1.13 %, respectively, validating the effectiveness of the proposed module. Table 3 shows the ablation experiment of the convolution kernel size k used for one-dimensional convolution at the channel latitude. The experiment proves that the model performs best when k is an adaptive channel size. From heatmap2 in Figure 10, it can be observed that, compared to heatmap1, the addition of BFAM significantly reduces the areas of misjudgment. The weights along the edges of the target buildings become more pronounced, leading to a more precise localization of the edges.
- Ablation experiments of BFM: Our proposed BFM facilitates the network in precisely identifying changing locations during the feature decoding phase by integrating global and differential information, thereby enhancing the representation of texture and edge features. Experimental results shown in Table 2 demonstrate that BFM successfully integrates two semantic pieces of information, improving the MIoU score by 0.60% and the F1 score by 0.37%, enhancing the model’s accuracy.
- Ablation experiments of IAM: The attention module enables the network to adaptively adjust the weights and pixel positions across each channel, emphasizing factors related to changes while suppressing irrelevant ones. This method is a crucial approach to improving feature extraction efficiency in the network. The experimental findings presented in Table 2 show that AMFNet raises the F1 score by 0.31% and the IoU by 0.52%, affirming the accuracy of the proposed module. From Heatmap3 in Figure 10, it is evident that employing interactive features for decoding, a key innovation in this paper, achieves remarkable results. The decoded feature maps undergo further processing through BFM and IAM, leading to a higher emphasis on the target regions. This results in a reduction of misjudgments and omissions along the edges, making the distinction between changed and unchanged regions more apparent.
- Ablation experiments of multi-scale supervised training: In order to enhance the detection capability of changes at various scales, we add losses from different layers in the decoding stage to the overall training loss in a certain proportion. This results in an improvement of 0.40% and 0.78% in the F1 and IoU scores, respectively, strengthening the model’s robustness.
3.3. Comparative Experiments with Other Classical Networks
3.3.1. Comparative Experiments of Different Algorithms on LEVIR-CD
3.3.2. Comparative Experiments of Different Algorithms on GZ-CD
3.3.3. Comparative Experiments of Different Algorithms on SYSU-CD
4. Discussion
4.1. Advantages of the Proposed Method
4.2. Limitations and Expectations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Amare, M.T.; Demissie, S.T.; Beza, S.A.; Erena, S.H. Land cover change detection and prediction in the Fafan catchment of Ethiopia. J. Geovis. Spat. Anal. 2023, 7, 19. [Google Scholar] [CrossRef]
- Eisavi, V.; Homayouni, S.; Karami, J. Integration of remotely sensed spatial and spectral information for change detection using FAHP. J. Fac. For. Istanb. Univ. 2016, 66, 524–538. [Google Scholar] [CrossRef]
- de Alwis Pitts, D.A.; So, E. Enhanced change detection index for disaster response, recovery assessment and monitoring of accessibility and open spaces (camp sites). Int. J. Appl. Earth Obs. Geoinf. 2017, 57, 49–60. [Google Scholar] [CrossRef]
- Tan, K.; Ma, W.; Chen, L.; Wang, H.; Du, Q.; Du, P.; Yan, B.; Liu, R.; Li, H. Estimating the distribution trend of soil heavy metals in mining area from HyMap airborne hyperspectral imagery based on ensemble learning. J. Hazard. Mater. 2021, 401, 123288. [Google Scholar] [CrossRef]
- Qin, H.; Wang, J.; Mao, X.; Zhao, Z.; Gao, X.; Lu, W. An Improved Faster R-CNN Method for Landslide Detection in Remote Sensing Images. J. Geovis. Spat. Anal. 2024, 8, 2. [Google Scholar] [CrossRef]
- Ji, R.; Tan, K.; Wang, X.; Pan, C.; Xin, L. Spatiotemporal monitoring of a grassland ecosystem and its net primary production using Google Earth Engine: A case study of inner mongolia from 2000 to 2020. Remote Sens. 2021, 13, 4480. [Google Scholar] [CrossRef]
- Kokila, S.; Jayachandran, A. Hybrid Behrens-Fisher-and gray contrast–based feature point selection for building detection from satellite images. J. Geovis. Spat. Anal. 2023, 7, 8. [Google Scholar] [CrossRef]
- Wang, Z.; Xia, M.; Weng, L.; Hu, K.; Lin, H. Dual Encoder–Decoder Network for Land Cover Segmentation of Remote Sensing Image. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 2372–2385. [Google Scholar] [CrossRef]
- Weismiller, R.; Kristof, S.; Scholz, D.; Anuta, P.; Momin, S. Change detection in coastal zone environments. Photogramm. Eng. Remote Sens. 1977, 43, 1533–1539. [Google Scholar]
- Ke, L.; Lin, Y.; Zeng, Z.; Zhang, L.; Meng, L. Adaptive Change Detection With Significance Test. IEEE Access 2018, 6, 27442–27450. [Google Scholar] [CrossRef]
- Rignot, E.J.; Van Zyl, J.J. Change detection techniques for ERS-1 SAR data. IEEE Trans. Geosci. Remote Sens. 1993, 31, 896–906. [Google Scholar] [CrossRef]
- Ridd, M.K.; Liu, J. A comparison of four algorithms for change detection in an urban environment. Remote Sens. Environ. 1998, 63, 95–100. [Google Scholar] [CrossRef]
- Ferraris, V.; Dobigeon, N.; Wei, Q.; Chabert, M. Detecting changes between optical images of different spatial and spectral resolutions: A fusion-based approach. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1566–1578. [Google Scholar] [CrossRef]
- Du, P.; Wang, X.; Chen, D.; Liu, S.; Lin, C.; Meng, Y. An improved change detection approach using tri-temporal logic-verified change vector analysis. ISPRS J. Photogramm. Remote Sens. 2020, 161, 278–293. [Google Scholar] [CrossRef]
- Deng, J.; Wang, K.; Deng, Y.; Qi, G. PCA-based land-use change detection and analysis using multitemporal and multisensor satellite data. Int. J. Remote Sens. 2008, 29, 4823–4838. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, P.; Zhou, M. Multireceiver SAS imagery with generalized PCA. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1502205. [Google Scholar] [CrossRef]
- Raj, J.R.; Srinivasulu, S. Change detection of images based on multivariate alteration detection method. In Proceedings of the 2020 6th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 6–7 March 2020; pp. 847–850. [Google Scholar]
- Chen, H.; Yokoya, N.; Chini, M. Fourier domain structural relationship analysis for unsupervised multimodal change detection. ISPRS J. Photogramm. Remote Sens. 2023, 198, 99–114. [Google Scholar] [CrossRef]
- Ji, L.; Zhao, J.; Zhao, Z. A Novel End-to-End Unsupervised Change Detection Method with Self-Adaptive Superpixel Segmentation for SAR Images. Remote Sens. 2023, 15, 1724. [Google Scholar] [CrossRef]
- Dou, P.; Han, Z. Quantifying Land Use/Land Cover Change and Urban Expansion in Dongguan, China, From 1987 to 2020. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 201–209. [Google Scholar] [CrossRef]
- Dou, P.; Chen, Y. Dynamic monitoring of land-use/land-cover change and urban expansion in Shenzhen using Landsat imagery from 1988 to 2015. Int. J. Remote Sens. 2017, 38, 5388–5407. [Google Scholar] [CrossRef]
- Juan, S.; Gui-Jin, W.; Xing-Gang, L.; Dai-Zhi, L. A change detection algorithm for man-made objects based on multi-temporal remote sensing images. Acta Autom. Sin. 2008, 34, 1040–1046. [Google Scholar]
- Wan, L.; Xiang, Y.; You, H. A post-classification comparison method for SAR and optical images change detection. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1026–1030. [Google Scholar] [CrossRef]
- Wang, X.; Girshick, R.; Gupta, A.; He, K. Non-local neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7794–7803. [Google Scholar]
- Wu, C.; Du, B.; Cui, X.; Zhang, L. A post-classification change detection method based on iterative slow feature analysis and Bayesian soft fusion. Remote Sens. Environ. 2017, 199, 241–255. [Google Scholar] [CrossRef]
- Tan, K.; Zhang, Y.; Wang, X.; Chen, Y. Object-based change detection using multiple classifiers and multi-scale uncertainty analysis. Remote Sens. 2019, 11, 359. [Google Scholar] [CrossRef]
- Han, Y.; Javed, A.; Jung, S.; Liu, S. Object-based change detection of very high resolution images by fusing pixel-based change detection results using weighted Dempster–Shafer theory. Remote Sens. 2020, 12, 983. [Google Scholar] [CrossRef]
- Dou, P.; Huang, C.; Han, W.; Hou, J.; Zhang, Y.; Gu, J. Remote sensing image classification using an ensemble framework without multiple classifiers. ISPRS J. Photogramm. Remote Sens. 2024, 208, 190–209. [Google Scholar] [CrossRef]
- Jiang, S.; Dong, R.; Wang, J.; Xia, M. Credit Card Fraud Detection Based on Unsupervised Attentional Anomaly Detection Network. Systems 2023, 11, 305. [Google Scholar] [CrossRef]
- Dou, P.; Shen, H.; Li, Z.; Guan, X. Time series remote sensing image classification framework using combination of deep learning and multiple classifiers system. Int. J. Appl. Earth Obs. Geoinf. 2021, 103, 102477. [Google Scholar] [CrossRef]
- Dai, X.; Chen, K.; Xia, M.; Weng, L.; Lin, H. LPMSNet: Location Pooling Multi-Scale Network for Cloud and Cloud Shadow Segmentation. Remote Sens. 2023, 15, 4005. [Google Scholar] [CrossRef]
- Wang, X.; Yan, X.; Tan, K.; Pan, C.; Ding, J.; Liu, Z.; Dong, X. Double U-Net (W-Net): A change detection network with two heads for remote sensing imagery. Int. J. Appl. Earth Obs. Geoinf. 2023, 122, 103456. [Google Scholar] [CrossRef]
- Chen, K.; Dai, X.; Xia, M.; Weng, L.; Hu, K.; Lin, H. MSFANet: Multi-Scale Strip Feature Attention Network for Cloud and Cloud Shadow Segmentation. Remote Sens. 2023, 15, 4853. [Google Scholar] [CrossRef]
- Ding, L.; Xia, M.; Lin, H.; Hu, K. Multi-Level Attention Interactive Network for Cloud and Snow Detection Segmentation. Remote Sens. 2024, 16, 112. [Google Scholar] [CrossRef]
- Weng, L.; Pang, K.; Xia, M.; Lin, H.; Qian, M.; Zhu, C. Sgformer: A Local and Global Features Coupling Network for Semantic Segmentation of Land Cover. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 6812–6824. [Google Scholar] [CrossRef]
- Niu, C.; Tan, K.; Jia, X.; Wang, X. Deep learning based regression for optically inactive inland water quality parameter estimation using airborne hyperspectral imagery. Environ. Pollut. 2021, 286, 117534. [Google Scholar] [CrossRef] [PubMed]
- Ji, H.; Xia, M.; Zhang, D.; Lin, H. Multi-Supervised Feature Fusion Attention Network for Clouds and Shadows Detection. ISPRS Int. J. Geo-Inf. 2023, 12, 247. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Li, X.; He, M.; Li, H.; Shen, H. A combined loss-based multiscale fully convolutional network for high-resolution remote sensing image change detection. IEEE Geosci. Remote Sens. Lett. 2021, 19, 8017505. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; Proceedings, Part III 18. Springer: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]
- Chen, H.; Qi, Z.; Shi, Z. Remote sensing image change detection with transformers. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5900318. [Google Scholar] [CrossRef]
- Xing, Y.; Jiang, J.; Xiang, J.; Yan, E.; Song, Y.; Mo, D. LightCDNet: Lightweight Change Detection Network Based on VHR Images. IEEE Geosci. Remote Sens. Lett. 2023, 20, 2504105. [Google Scholar] [CrossRef]
- Chen, H.; Shi, Z. A spatial-temporal attention-based method and a new dataset for remote sensing image change detection. Remote Sens. 2020, 12, 1662. [Google Scholar] [CrossRef]
- Lv, Z.; Huang, H.; Sun, W.; Lei, T.; Benediktsson, J.A.; Li, J. Novel enhanced UNet for change detection using multimodal remote sensing image. IEEE Geosci. Remote Sens. Lett. 2023, 20, 2505405. [Google Scholar] [CrossRef]
- Lv, Z.; Liu, J.; Sun, W.; Lei, T.; Benediktsson, J.A.; Jia, X. Hierarchical attention feature fusion-based network for land cover change detection with homogeneous and heterogeneous remote sensing images. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4411115. [Google Scholar] [CrossRef]
- Lv, Z.; Zhang, P.; Sun, W.; Lei, T.; Benediktsson, J.A.; Li, P. Sample Iterative Enhancement Approach for Improving Classification Performance of Hyperspectral Imagery. IEEE Geosci. Remote Sens. Lett. 2023, 21, 2500605. [Google Scholar] [CrossRef]
- Ren, H.; Xia, M.; Weng, L.; Hu, K.; Lin, H. Dual-Attention-Guided Multiscale Feature Aggregation Network for Remote Sensing Image Change Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 4899–4916. [Google Scholar] [CrossRef]
- Song, L.; Xia, M.; Jin, J.; Qian, M.; Zhang, Y. SUACDNet: Attentional change detection network based on siamese U-shaped structure. Int. J. Appl. Earth Obs. Geoinf. 2021, 105, 102597. [Google Scholar] [CrossRef]
- Luo, F.; Zhou, T.; Liu, J.; Guo, T.; Gong, X.; Ren, J. Multiscale diff-changed feature fusion network for hyperspectral image change detection. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5502713. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, M.; Hao, Z.; Wang, Q.; Wang, Q.; Ye, Y. MSGFNet: Multi-Scale Gated Fusion Network for Remote Sensing Image Change Detection. Remote Sens. 2024, 16, 572. [Google Scholar] [CrossRef]
- Song, L.; Xia, M.; Weng, L.; Lin, H.; Qian, M.; Chen, B. Axial cross attention meets CNN: Bibranch fusion network for change detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 16, 32–43. [Google Scholar] [CrossRef]
- Zhao, H.; Shi, J.; Qi, X.; Wang, X.; Jia, J. Pyramid scene parsing network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 June 2017; pp. 2881–2890. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Deepanshi, R.; Barkur, D.; Suresh, S.; Lal, C.S.; Reddy, P.G.; Diwakar, P.G. RSCDNet: A Robust Deep Learning Architecture for Change Detection From Bi-Temporal High Resolution Remote Sensing Images. IEEE Trans. Emerg. Top. Comput. Intell. 2022, 7, 537–551. [Google Scholar] [CrossRef]
- Yin, H.; Weng, L.; Li, Y.; Xia, M.; Hu, K.; Lin, H.; Qian, M. Attention-guided siamese networks for change detection in high resolution remote sensing images. Int. J. Appl. Earth Obs. Geoinf. 2023, 117, 103206. [Google Scholar] [CrossRef]
- Ren, W.; Wang, Z.; Xia, M.; Lin, H. MFINet: Multi-Scale Feature Interaction Network for Change Detection of High-Resolution Remote Sensing Images. Remote Sens. 2024, 16, 1269. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, X.; Xiao, P.; He, G. Exchanging Dual-Encoder–Decoder: A New Strategy for Change Detection With Semantic Guidance and Spatial Localization. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4508016. [Google Scholar] [CrossRef]
- Chollet, F. Xception: Deep learning with depthwise separable convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1251–1258. [Google Scholar]
- Zhang, H.; Chen, H.; Zhou, C.; Chen, K.; Liu, C.; Zou, Z.; Shi, Z. BiFA: Remote Sensing Image Change Detection with Bitemporal Feature Alignment. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5614317. [Google Scholar] [CrossRef]
- Shi, Q.; Liu, M.; Li, S.; Liu, X.; Wang, F.; Zhang, L. A deeply supervised attention metric-based network and an open aerial image dataset for remote sensing change detection. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5604816. [Google Scholar] [CrossRef]
- Peng, D.; Bruzzone, L.; Zhang, Y.; Guan, H.; Ding, H.; Huang, X. SemiCDNet: A Semisupervised Convolutional Neural Network for Change Detection in High Resolution Remote-Sensing Images. IEEE Trans. Geosci. Remote Sens. 2021, 59, 5891–5906. [Google Scholar] [CrossRef]
- Lee, C.Y.; Xie, S.; Gallagher, P.; Zhang, Z.; Tu, Z. Deeply-supervised nets. In Proceedings of the Artificial Intelligence and Statistics, San Diego, CA, USA, 9–12 May 2015; pp. 562–570. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Daudt, R.C.; Le Saux, B.; Boulch, A. Fully convolutional siamese networks for change detection. In Proceedings of the 2018 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018; pp. 4063–4067. [Google Scholar]
- Varghese, A.; Gubbi, J.; Ramaswamy, A.; Balamuralidhar, P. ChangeNet: A deep learning architecture for visual change detection. In Proceedings of the European Conference on Computer Vision (ECCV) Workshops, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Zhang, C.; Yue, P.; Tapete, D.; Jiang, L.; Shangguan, B.; Huang, L.; Liu, G. A deeply supervised image fusion network for change detection in high resolution bi-temporal remote sensing images. ISPRS J. Photogramm. Remote Sens. 2020, 166, 183–200. [Google Scholar] [CrossRef]
- Feng, Y.; Xu, H.; Jiang, J.; Liu, H.; Zheng, J. ICIF-Net: Intra-scale cross-interaction and inter-scale feature fusion network for bitemporal remote sensing images change detection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4410213. [Google Scholar] [CrossRef]
- Fang, S.; Li, K.; Shao, J.; Li, Z. SNUNet-CD: A densely connected Siamese network for change detection of VHR images. IEEE Geosci. Remote Sens. Lett. 2021, 19, 8007805. [Google Scholar] [CrossRef]
- Feng, Y.; Jiang, J.; Xu, H.; Zheng, J. Change detection on remote sensing images using dual-branch multilevel intertemporal network. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4401015. [Google Scholar] [CrossRef]
- Chen, K.; Liu, C.; Chen, H.; Zhang, H.; Li, W.; Zou, Z.; Shi, Z. RSPrompter: Learning to prompt for remote sensing instance segmentation based on visual foundation model. IEEE Trans. Geosci. Remote Sens. 2024, 62, 4701117. [Google Scholar] [CrossRef]
- Chen, K.; Liu, C.; Li, W.; Liu, Z.; Chen, H.; Zhang, H.; Zou, Z.; Shi, Z. Time Travelling Pixels: Bitemporal Features Integration with Foundation Model for Remote Sensing Image Change Detection. arXiv 2023, arXiv:2312.16202. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Backbone | PR (%) | RC (%) | IoU (%) | (%) |
|---|---|---|---|---|
| VGG19 | 82.53 | 82.79 | 76.16 | 79.43 |
| VGG16 | 85.36 | 84.68 | 78.54 | 80.21 |
| ResNet18 | 93.98 | 90.38 | 81.54 | 89.36 |
| ResNet50 | 94.22 | 90.35 | 82.54 | 90.05 |
| ResNet34 | 95.51 | 92.15 | 83.13 | 90.79 |
| Method | PR (%) | RC (%) | IoU (%) | (%) | Time (ms) |
|---|---|---|---|---|---|
| Baseline | 94.10 | 87.72 | 80.83 | 88.74 | 15.12 |
| Baseline + BFAM | 94.57 | 89.31 | 81.61 | 89.87 | 20.47 |
| Baseline + BFAM + BFM | 95.16 | 88.54 | 82.21 | 90.24 | 22.32 |
| Baseline + BFAM + BFM + IAM | 95.30 | 90.99 | 82.73 | 90.55 | 24.23 |
| Baseline + BFAM + BFM + IAM + aux_loss | 95.51 | 92.15 | 83.13 | 90.79 | 27.89 |
| Kernel Size | IoU (%) | (%) |
|---|---|---|
| 82.60 | 89.46 | |
| 82.97 | 90.30 | |
| 81.78 | 88.35 | |
| k is adaptive | 83.13 | 90.79 |
| Encoding Stage Fusion Unit | Decoding Stage Interaction Unit | IoU (%) | (%) |
|---|---|---|---|
| Add | Regular Attention Module | 81.84 | 89.96 |
| BFAM | Regular Attention Module | 82.61 | 90.30 |
| Add | IAM | 82.87 | 90.12 |
| BFAM | IAM | 83.13 | 90.79 |
| Method | PR(%) | RC (%) | OA (%) | Kappa (%) | IoU (%) | (%) | Params (M) | FLOPs (G) | Time (ms) |
|---|---|---|---|---|---|---|---|---|---|
| FC-EF [64] | 85.58 | 80.89 | 98.33 | 82.30 | 71.19 | 83.17 | 1.35 | 3.57 | 7.59 |
| FC-Siam-Diff [64] | 89.49 | 80.67 | 98.53 | 84.08 | 73.69 | 84.85 | 1.35 | 4.72 | 5.13 |
| FC-Siam-Conc [64] | 86.76 | 85.83 | 98.61 | 85.56 | 75.89 | 86.29 | 1.55 | 5.32 | 5.22 |
| ChangeNet [65] | 91.63 | 86.88 | 98.93 | 88.63 | 80.49 | 89.19 | 47.20 | 10.91 | 17.01 |
| DSIFN [66] | 91.53 | 85.70 | 98.87 | 87.75 | 79.12 | 88.34 | 35.73 | 82.26 | 12.13 |
| BIT [41] | 91.26 | 88.51 | 98.98 | 89.33 | 81.59 | 89.86 | 3.49 | 10.63 | 16.12 |
| ICIFNet [67] | 91.31 | 87.23 | 98.56 | 89.16 | 81.24 | 89.18 | 23.84 | 24.51 | 49.53 |
| SNUNet [68] | 91.51 | 88.51 | 99.00 | 89.46 | 81.79 | 89.98 | 12.03 | 54.82 | 9.66 |
| DMINet [69] | 92.02 | 87.77 | 98.99 | 89.31 | 81.56 | 89.85 | 6.24 | 14.55 | 12.87 |
| SAGNet [55] | 91.79 | 88.76 | 99.02 | 89.58 | 81.98 | 90.10 | 32.23 | 12.25 | 25.32 |
| Ours | 94.77 | 91.15 | 99.07 | 90.30 | 83.13 | 90.79 | 30.27 | 10.81 | 27.89 |
| Method | PR (%) | RC (%) | OA (%) | Kappa (%) | IoU (%) | (%) |
|---|---|---|---|---|---|---|
| FC-EF [64] | 79.86 | 65.53 | 95.28 | 69.44 | 56.24 | 71.99 |
| FC-Siam-Diff [64] | 82.70 | 57.99 | 94.99 | 65.55 | 51.72 | 68.18 |
| FC-Siam-Conc [64] | 82.16 | 62.80 | 95.29 | 68.67 | 55.26 | 71.19 |
| ChangeNet [65] | 88.63 | 82.99 | 97.44 | 84.32 | 75.01 | 85.72 |
| DSIFN [66] | 89.35 | 75.46 | 96.91 | 79.83 | 68.76 | 81.49 |
| BIT [41] | 86.80 | 82.04 | 97.18 | 82.80 | 72.94 | 84.35 |
| ICIFNet [67] | 88.09 | 81.31 | 97.25 | 83.05 | 73.25 | 84.56 |
| SNUNet [68] | 89.00 | 84.80 | 97.62 | 85.54 | 76.75 | 86.85 |
| DMINet [69] | 86.62 | 82.85 | 97.23 | 83.17 | 73.45 | 84.70 |
| SAGNet [55] | 89.56 | 84.05 | 97.58 | 84.98 | 75.91 | 86.30 |
| Ours | 90.40 | 89.74 | 97.85 | 86.91 | 78.71 | 88.09 |
| Method | PR (%) | RC(%) | OA (%) | Kappa (%) | IoU (%) | (%) |
|---|---|---|---|---|---|---|
| FC-EF [64] | 78.78 | 76.69 | 89.63 | 70.97 | 63.56 | 77.72 |
| FC-Siam-Diff [64] | 80.35 | 74.26 | 88.71 | 64.42 | 55.11 | 71.06 |
| FC-Siam-Conc [64] | 81.51 | 75.11 | 90.11 | 71.80 | 64.17 | 78.18 |
| ChangeNet [65] | 79.91 | 71.11 | 88.97 | 68.19 | 60.33 | 75.25 |
| DSIFN [66] | 78.82 | 81.30 | 90.44 | 73.76 | 66.72 | 80.04 |
| BIT [41] | 81.22 | 73.87 | 89.81 | 70.81 | 63.09 | 77.37 |
| ICIFNet [67] | 78.23 | 74.38 | 89.08 | 69.17 | 61.62 | 76.25 |
| SNUNet [68] | 79.37 | 78.39 | 90.10 | 72.42 | 65.13 | 78.88 |
| DMINet [69] | 81.54 | 79.44 | 91.15 | 74.59 | 67.06 | 80.28 |
| SAGNet [55] | 81.25 | 81.76 | 91.72 | 76.57 | 69.31 | 81.87 |
| Ours | 88.23 | 82.51 | 92.30 | 77.38 | 69.85 | 82.25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhan, Z.; Ren, H.; Xia, M.; Lin, H.; Wang, X.; Li, X. AMFNet: Attention-Guided Multi-Scale Fusion Network for Bi-Temporal Change Detection in Remote Sensing Images. Remote Sens. 2024, 16, 1765. https://doi.org/10.3390/rs16101765
Zhan Z, Ren H, Xia M, Lin H, Wang X, Li X. AMFNet: Attention-Guided Multi-Scale Fusion Network for Bi-Temporal Change Detection in Remote Sensing Images. Remote Sensing. 2024; 16(10):1765. https://doi.org/10.3390/rs16101765
Chicago/Turabian StyleZhan, Zisen, Hongjin Ren, Min Xia, Haifeng Lin, Xiaoya Wang, and Xin Li. 2024. "AMFNet: Attention-Guided Multi-Scale Fusion Network for Bi-Temporal Change Detection in Remote Sensing Images" Remote Sensing 16, no. 10: 1765. https://doi.org/10.3390/rs16101765
APA StyleZhan, Z., Ren, H., Xia, M., Lin, H., Wang, X., & Li, X. (2024). AMFNet: Attention-Guided Multi-Scale Fusion Network for Bi-Temporal Change Detection in Remote Sensing Images. Remote Sensing, 16(10), 1765. https://doi.org/10.3390/rs16101765