



Tightly Coupled INS/APS Passive Single Beacon Navigation

Abstract
1. Introduction
- Surface cruise.
- Periodically sink and float.
- Underwater cruise.
2. The Basic Underwater Navigation Model
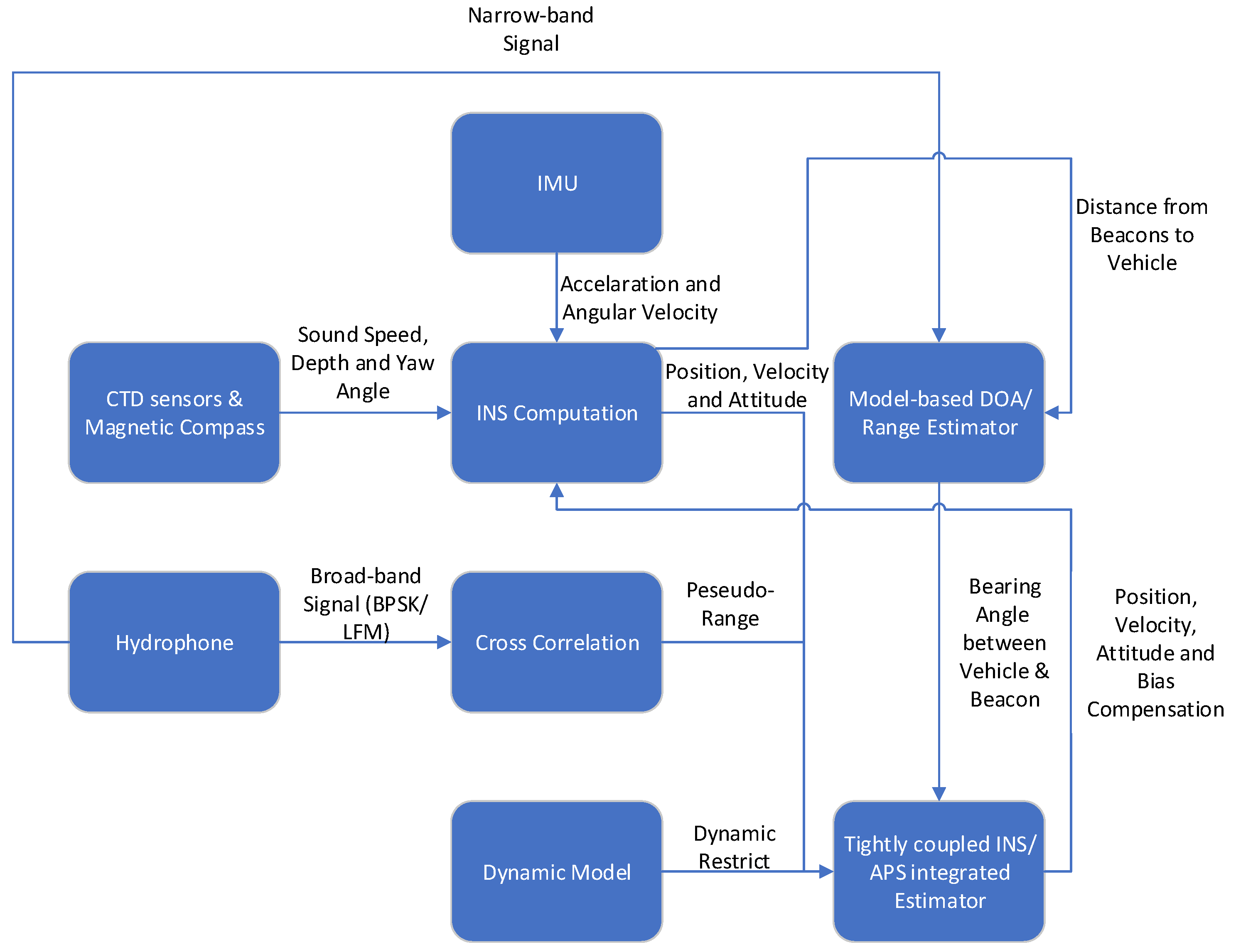
3. Methodology
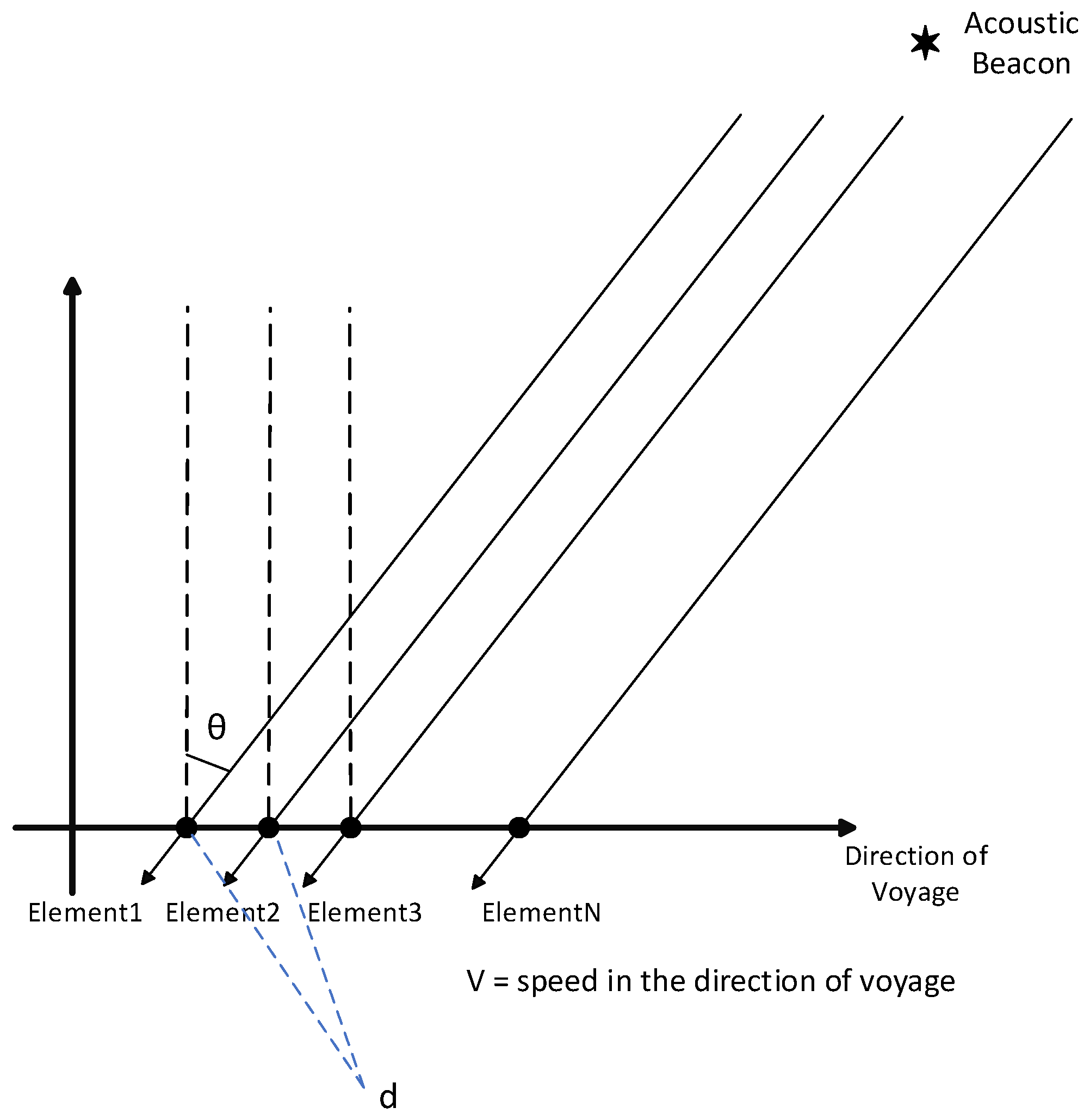
3.1. DOA/Range Estimator
3.1.1. The System Model
3.1.2. The Measurement Model
3.1.3. Observability Analysis
- The system (10) is undifferentiable if . This will happen if and only if and . Therefore, the model is unobservable if the trajectory of the AUV overlaps the position of the beacon. This result is also supported by the research of [9] but in a different aspect. Wang discussed the basic TOA/DOA single beacon localization geometric model and pointed out that the geometric state transformation matrix is not invertible when the vehicle’s trajectory overlaps the position of the beacon. However, unlike pure DOA or pure TOA localization method, when and (the trajectory of the vehicle is collinear with the beacon but does not overlap the beacon), the system is still observable.
3.1.4. UKF
3.2. Tightly Coupled INS/APS Navigation Estimator
3.2.1. The System Model
3.2.2. The Measurement Model
3.2.3. UKF
3.3. Parameters’ Selection and Motion Restriction
3.3.1. Parameters’ Selection
3.3.2. The Motion Restriction
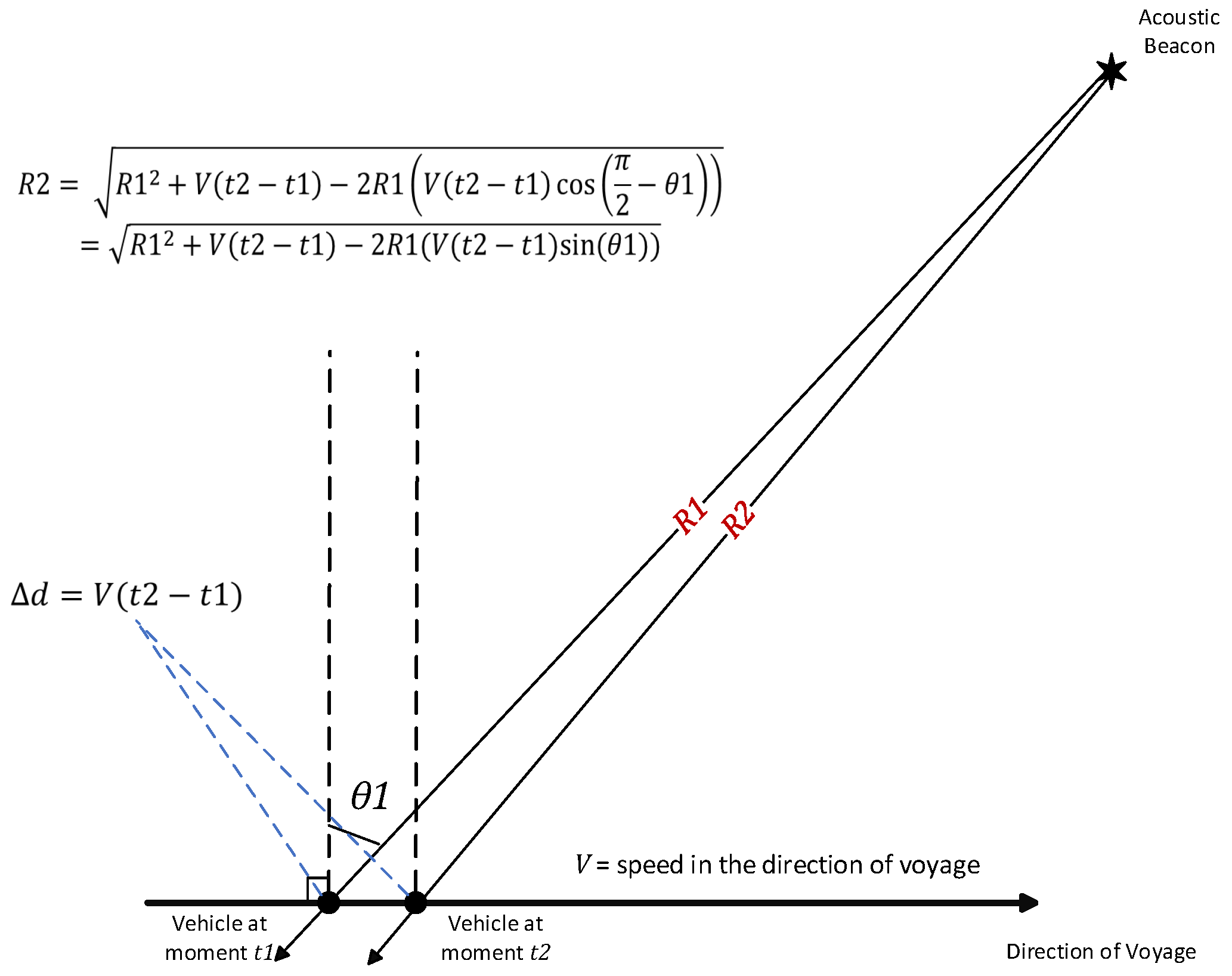
3.4. The OWTT Measurement
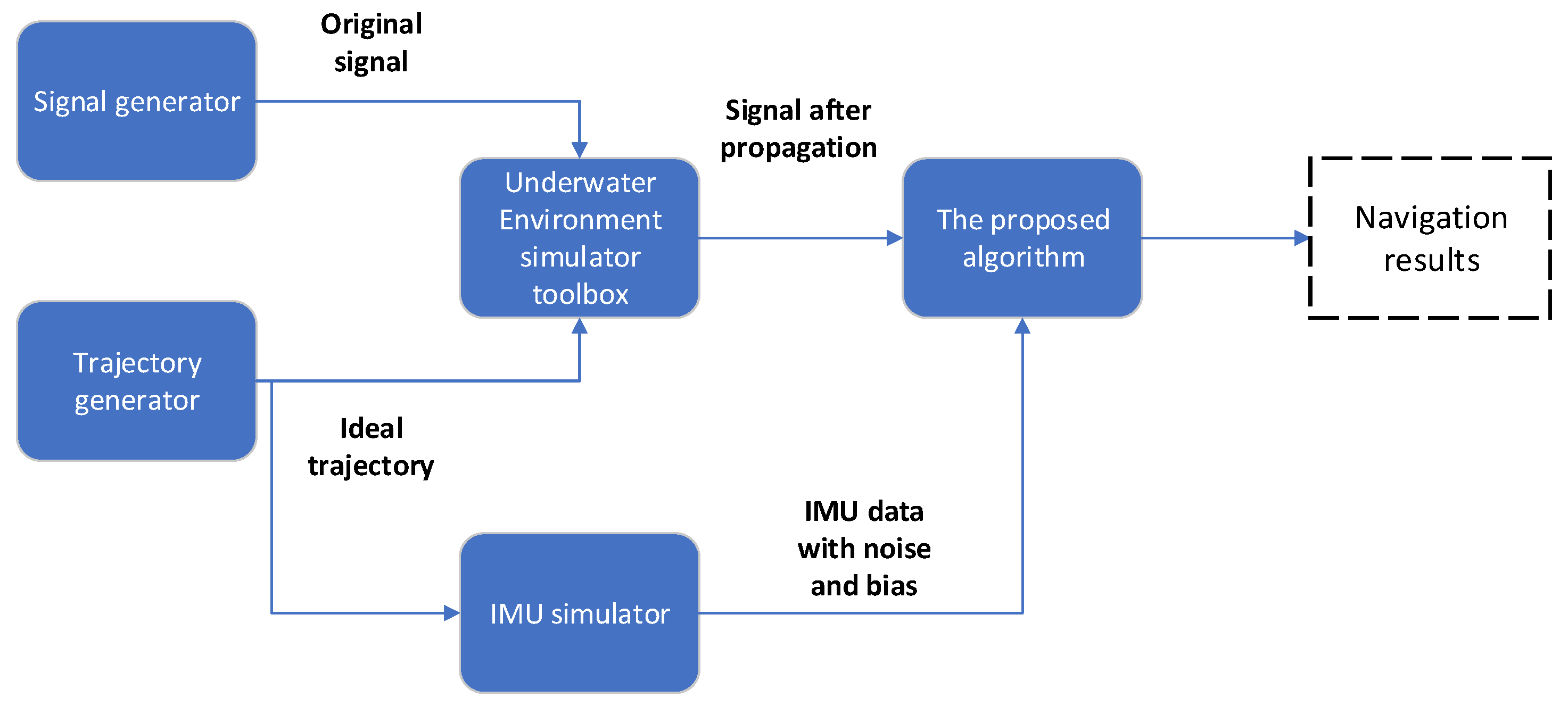
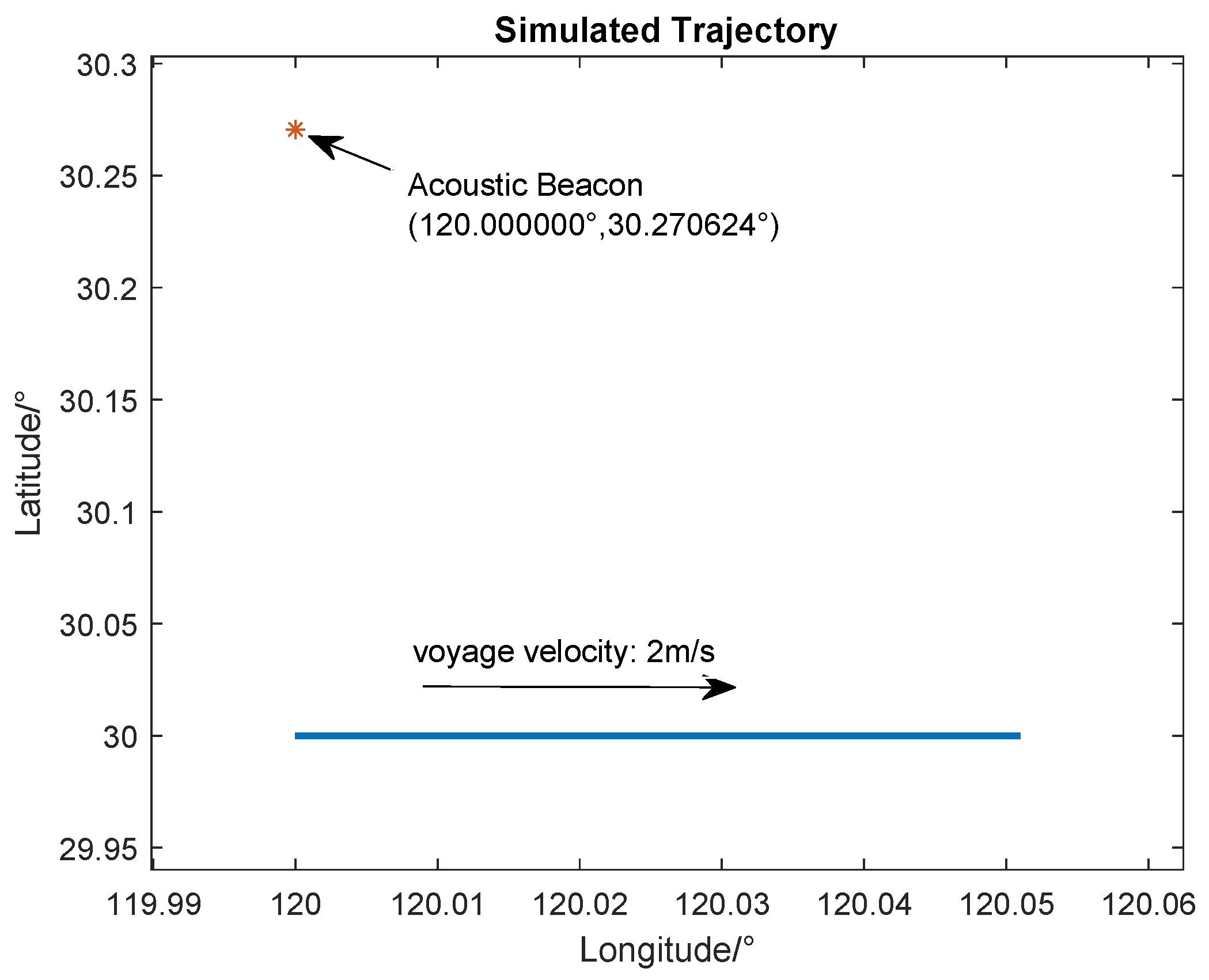
4. Simulation
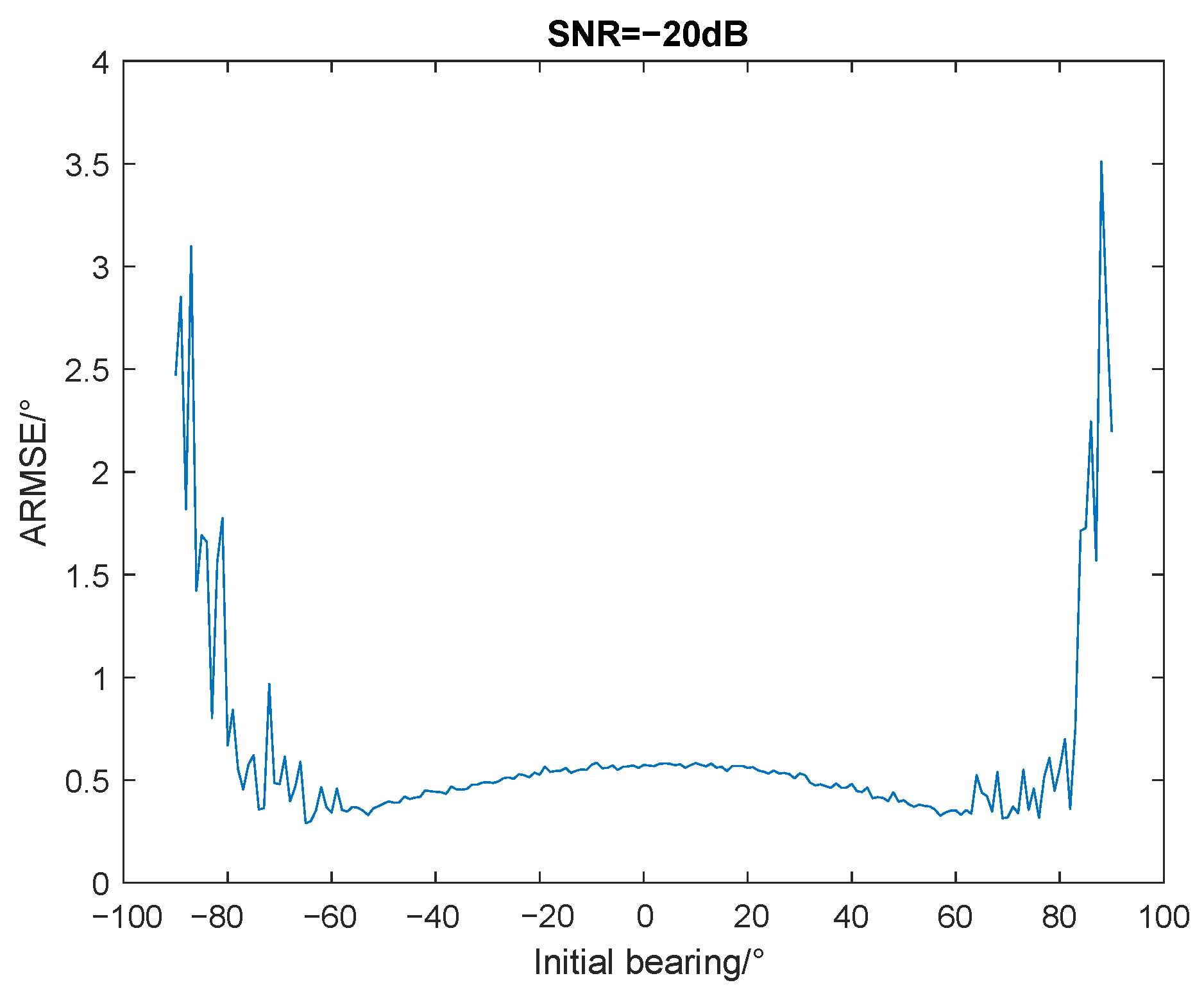
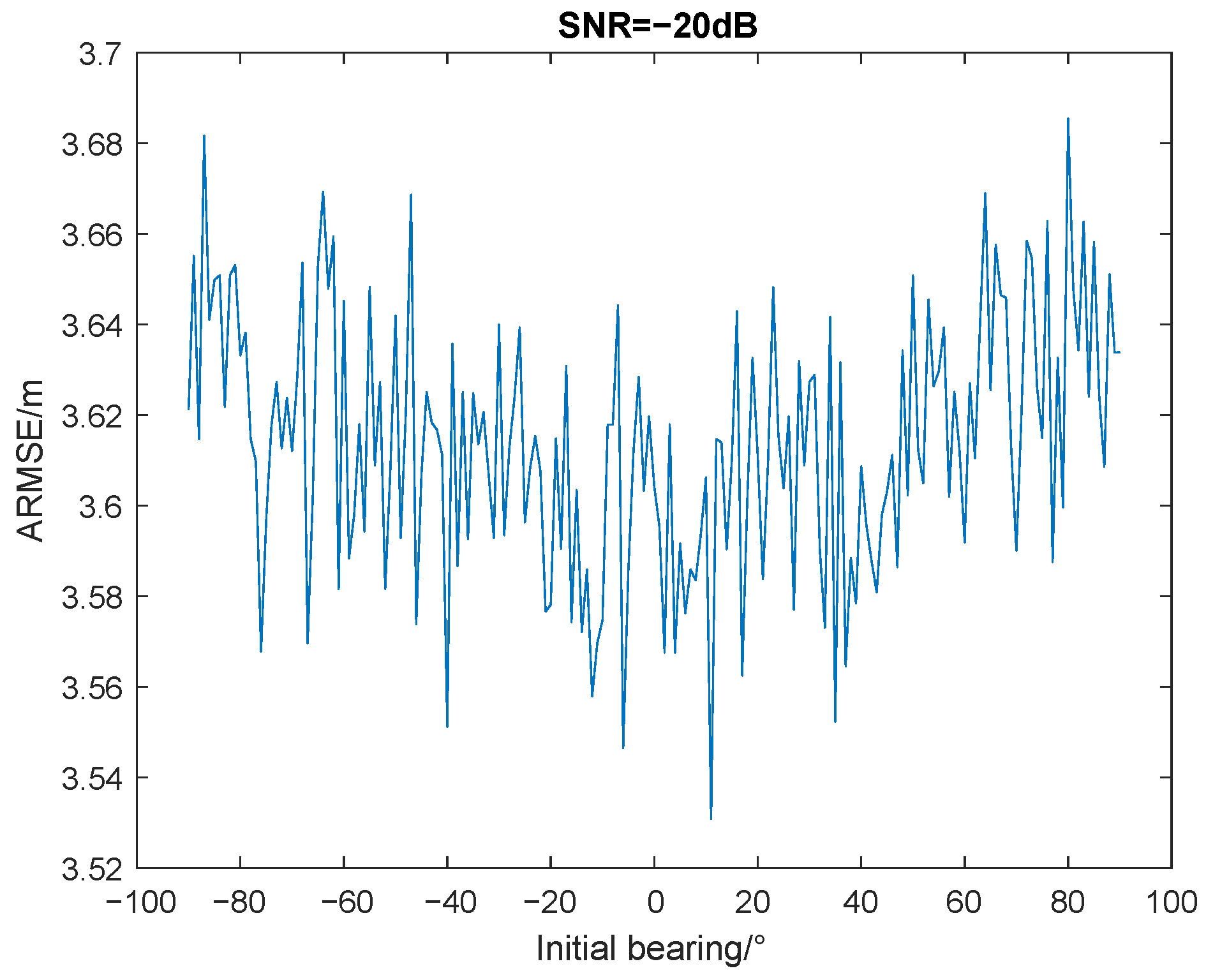
4.1. Motion Restriction Research
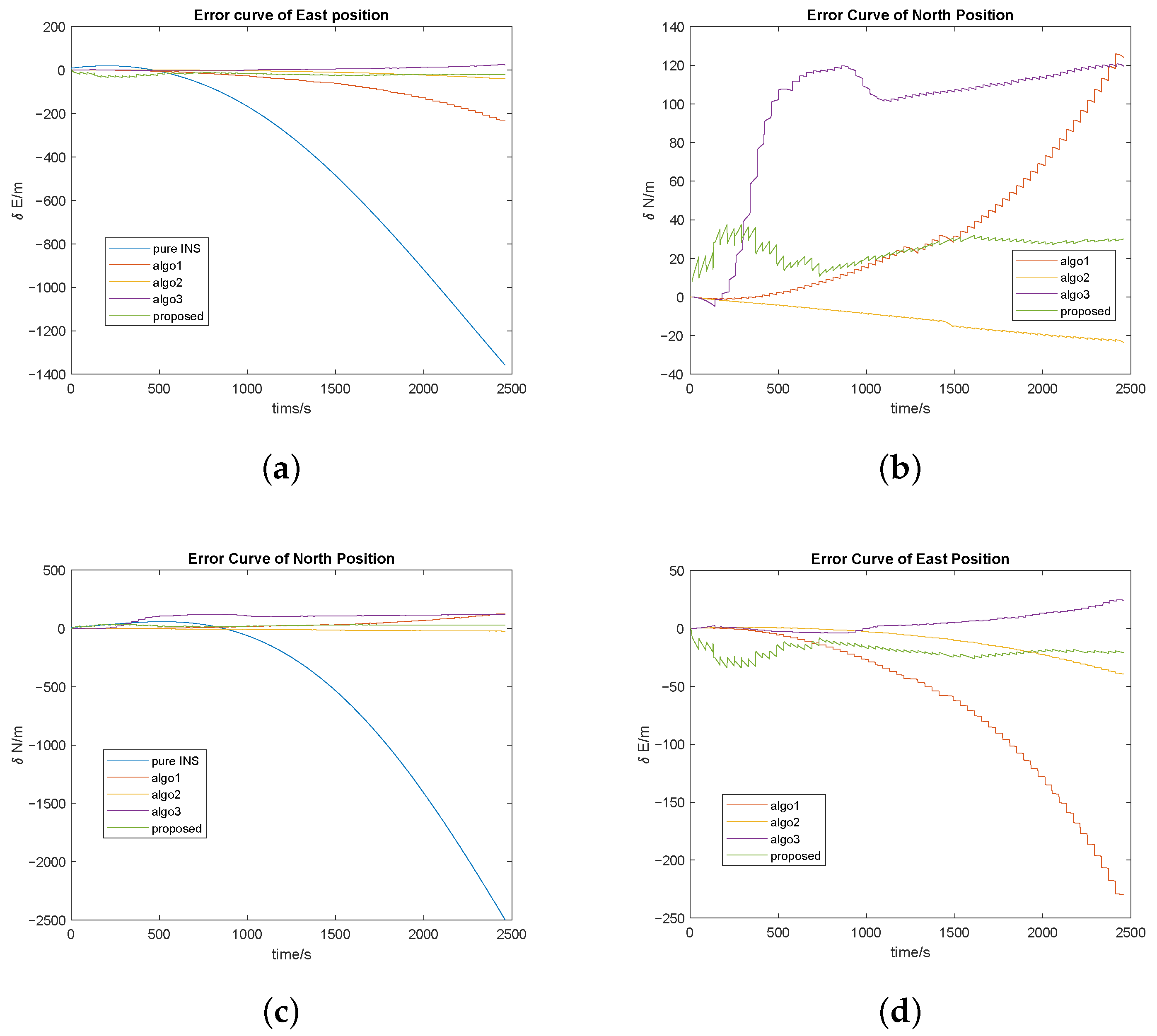
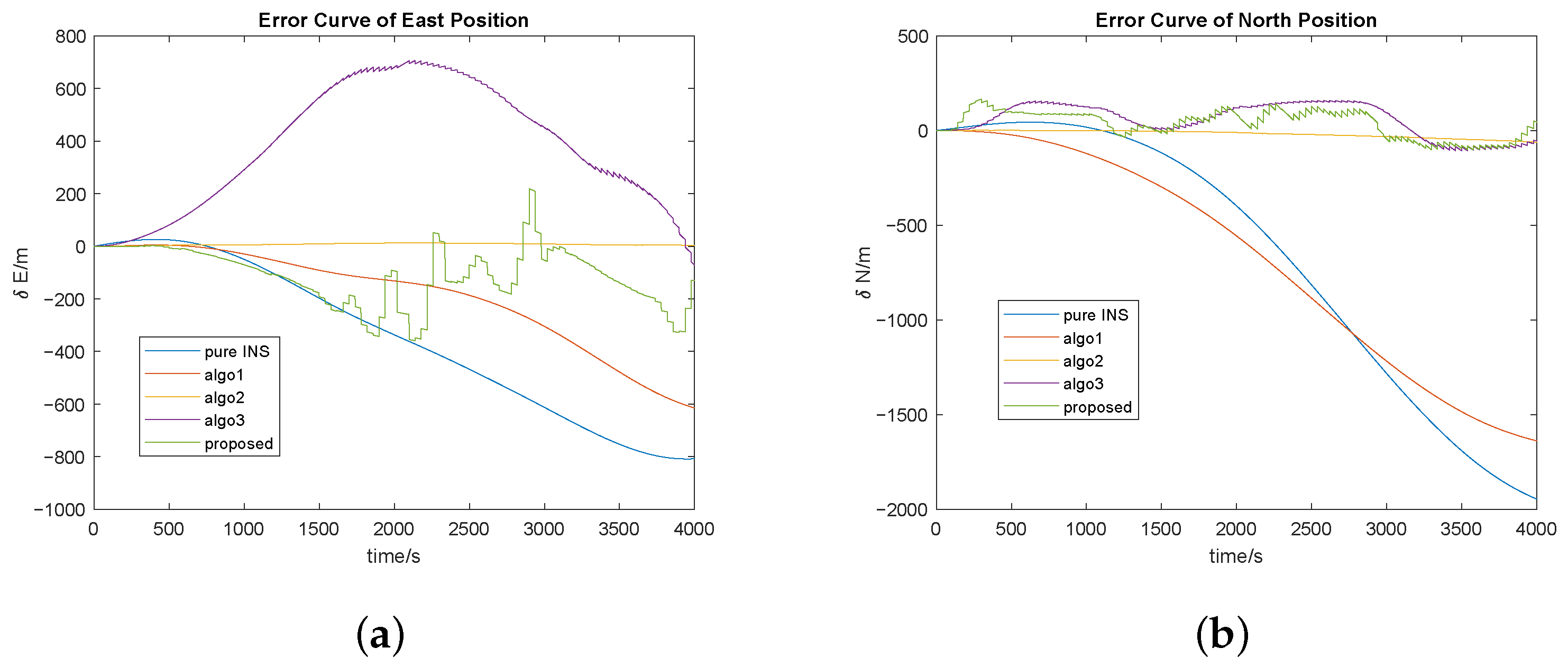
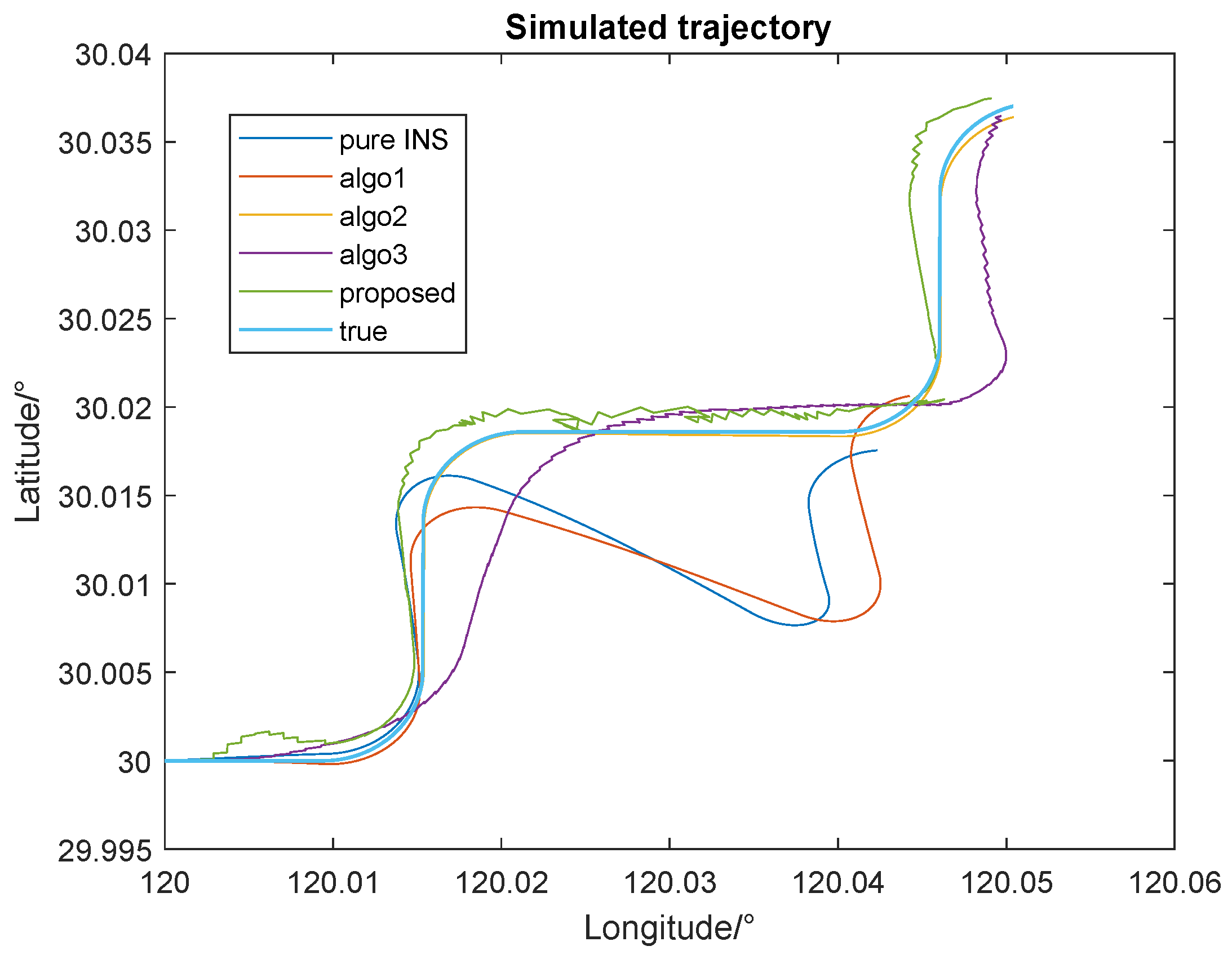
4.2. Performance Comparison
5. Field-Experimental Design
5.1. Experimental Requirements
5.2. Experimental Procedure
- Two ships carry the AUV and the beacon, respectively, and reach the preset positions. The beacon should be firstly at the 50 km point. Then, the AUV and the beacon are released into the ocean.
- The beacon plays the acoustic signal (single-frequency signal + wide bandwidth ranging signal). Note that the bandwidth of the signal should not overlap the LBL’s bandwidth. In the meantime, the AUV voyages along with the preset trajectory (the velocity of the AUV should be approximately constant and no more than 4 m/s). The AUV records the sensors’ data and the LBL positions. The whole process should last at least one hour. The 50 km-point test repeats three times.
- Then, the beacon should be deployed at the 100 km-point and play the same signal. The AUV repeats the same process as 50 km-point test.
- Repeat the same process for the 150 km-point test.
- Collect the data recorded by the AUV. Post-process the IMU’s data and the hydrophones data using the conventional single beacon method, range-only tightly coupled method, some state-of-the-art single beacon methods and the proposed method, respectively. Compare every method’s results with LBL data. Attention should be attached to three values: the average positioning error, the system available time, and the effective range of the acoustic aid.
6. Discussion and Conclusions
- The practical experiments verification. The real environment will be much more complex. Some parameters which are suitable for simulation may not be the same case in the real world. Practical experiments will help improve the model and verify its real performance.
- The implementation of auto-tuning and adaptive data-fusion algorithm will be also important in the next step of the work. Although there are lots of KF-based adaptive data-fusion algorithms, most of them just introduce some new hyperparameters such as fading factors. So, it is still a game of tuning. We hope that we can design an adaptive estimator which can provide the appropriate UKF parameters based on the underwater environment.
- Generalize the model. The current model is established based on the constant velocity model. However, a more general model is needed, as the motion type of the underwater vehicle is required to be more flexible.
- A better updating strategy. During the research of this work, we find that the updating rate of each subsystem is different. Especially, the OWTT range measurement is much lower than others. This problem causes the fluctuation of estimation error. The error curve is saw-toothed because of the long updating period. On the other hand, due to the disturbance of ocean circumstances, we cannot guarantee a stable updating rate of OWTT data. We want to find some methods such as temporal predictions to eliminate such fluctuation when OWTT measurement is not available.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| GNSS | Global navigation satellite system |
| INS | Inertial navigation system |
| APS | Acoustic positioning system |
| SNR | Signal–noise ratio |
| OWTT | One-way-travel-time |
| DOA | Direction-of-arrival |
| UKF | Unscented Kalman filter |
| DVL | Doppler velocity logger |
| CEKF | Centralized extended Kalman filter |
| LBL | Long Baseline |
| SBL | Short Baseline |
| USBL | Ultra Short Baseline |
| FM | Frequency modulation |
| AAM | Acoustic arrival matching |
| PASA | Passive synthetic aperture |
| ETAM | Extended towed array method |
| ML | Maximum likelihood |
| FFT | Fourier transform synthetic aperture method |
| SLBL | Synthetic long baseline |
| UUV | Unmanned underwater vehicles |
| ENU | East-North-Up |
| ECEF | Earth-Cantered Earth-Fixed Frame |
| LLA | Longitude-Latitude-Altitude frame |
| SVD | singular value decomposition |
| LFM | Linear frequency modulation |
Appendix A
| Algorithm A1 Pseudo code of the proposed algorithm |
| Require: |
| ▹ Initialize the vectors and matrices |
| MeasureInit() |
| ▹ Navigation and measurement initialization |
| while do |
| if then |
| if then |
| end if |
| j++; |
| end if |
| end while |
References
- Webster, S.E.; Lee, C.M.; Gobat, J.I. Preliminary results in under-ice acoustic navigation for seagliders in Davis Strait. In Proceedings of the 2014 Oceans, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Graupe, C.E.; van Uffelen, L.J.; Webster, S.E.; Worcester, P.F.; Dzieciuch, M.A. Preliminary results for glider localization in the Beaufort Duct using broadband acoustic sources at long range. In Proceedings of the OCEANS 2019 MTS/IEEE, Seattle, WA, USA, 27–31 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Webster, S.E.; Freitag, L.E.; Lee, C.M.; Gobat, J.I. Towards real-time under-ice acoustic navigation at mesoscale ranges. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 537–544. [Google Scholar] [CrossRef]
- Stergiopoulos, S.; Sullivan, E.J. Extended towed array processing by an overlap correlator. J. Acoust. Soc. Am. 1989, 86, 158–171. [Google Scholar] [CrossRef]
- Wang, Y.; Gong, Z.; Zhang, R. An improved phase correction algorithm in extended towed array method for passive synthetic aperture. Proc. Meet. Acoust. 2017, 30, 055007. [Google Scholar] [CrossRef]
- Bee, T.P.; Siong, L.H.; Swee, C.C.; Passerieux, J.M. Extended Towed Array Measurement: Beam-domain phase estimation and coherent summation. In Proceedings of the OCEANS 2006—Asia Pacific, Singapore, 16–19 May 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Lim, H.S.; Tong, P.B.; Chia, C.S. Scenario Based Study of ETAM and FFTSA in Realistic Simulated Environment. In Proceedings of the OCEANS 2006—Asia Pacific, Singapore, 16–19 May 2006; pp. 1–7. [Google Scholar] [CrossRef]
- Song, L.; Zhi-Xiang, Y. Influencing Factors of Passive Synthetic Aperture Technology Based on FFTSA. In Proceedings of the 2021 OES China Ocean Acoustics (COA), Harbin, China, 14–17 July 2021; pp. 955–960. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, G.C.; Wang, Y.; Zhang, Z.; Xing, M.; Yang, X. A High-Resolution and High-Precision Passive Positioning System Based on Synthetic Aperture Technique. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Sullivan, E.J. Model-Based Processing for Underwater Acoustic Arrays; SpringerBriefs in Physics; Springer: Cham, Switzerland, 2015. [Google Scholar] [CrossRef]
- Yang, T.C. Source depth estimation based on synthetic aperture beamfoming for a moving source. J. Acoust. Soc. Am. 2015, 138, 1678–1686. [Google Scholar] [CrossRef] [PubMed]
- Fischell, E.M.; Rypkema, N.R.; Schmidt, H. Relative Autonomy and Navigation for Command and Control of Low-Cost Autonomous Underwater Vehicles. IEEE Robot. Autom. Lett. 2019, 4, 1800–1806. [Google Scholar] [CrossRef]
- Kepper, J.H.; Claus, B.C.; Kinsey, J.C. A Navigation Solution Using a MEMS IMU, Model-Based Dead-Reckoning, and One-Way-Travel-Time Acoustic Range Measurements for Autonomous Underwater Vehicles. IEEE J. Ocean. Eng. 2019, 44, 664–682. [Google Scholar] [CrossRef]
- Larsen, M. Synthetic long baseline navigation of underwater vehicles. In Conference Proceedings (Cat. No.00CH37158), Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition, Providence, RI, USA, 11–14 September 2000; Volume 3, pp. 2043–2050. [CrossRef]
- Casey, T.; Guimond, B.; Hu, J. Underwater Vehicle Positioning Based on Time of Arrival Measurements from a Single Beacon. In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–8. [Google Scholar] [CrossRef]
- Webster, S.E.; Eustice, R.M.; Singh, H.; Whitcomb, L.L. Advances in single-beacon one-way-travel-time acoustic navigation for underwater vehicles. Int. J. Robot. Res. 2012, 31, 935–950. [Google Scholar] [CrossRef]
- Qin, H.D.; Yu, X.; Zhu, Z.B.; Deng, Z.C. A variational Bayesian approximation based adaptive single beacon navigation method with unknown ESV. Ocean. Eng. 2020, 209, 107484. [Google Scholar] [CrossRef]
- Rypkema, N.R.; Fischell, E.M.; Schmidt, H. One-way travel-time inverted ultra-short baseline localization for low-cost autonomous underwater vehicles. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4920–4926. [Google Scholar] [CrossRef]
- Rypkema, N.R.; Fischel, E.M.; Schmidt, H. Closed-Loop Single-Beacon Passive Acoustic Navigation for Low-Cost Autonomous Underwater Vehicles. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 641–648. [Google Scholar] [CrossRef]
- Sun, S.; Zhang, X.; Zheng, C.; Zhao, C.; Fu, J. Underwater asynchronous navigation using single beacon based on the phase difference. Appl. Acoust. 2021, 172, 107546. [Google Scholar] [CrossRef]
- Zhao, W.; Zhao, H.; Liu, G.; Zhang, G. ANFIS-EKF-Based Single-Beacon Localization Algorithm for AUV. Remote. Sens. 2022, 14, 5281. [Google Scholar] [CrossRef]
- De Palma, D.; Arrichiello, F.; Parlangeli, G.; Indiveri, G. Underwater localization using single beacon measurements: Observability analysis for a double integrator system. Ocean. Eng. 2017, 142, 650–665. [Google Scholar] [CrossRef]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV Navigation and Localization: A Review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Leonard, J.J.; Bahr, A. Autonomous Underwater Vehicle Navigation. In Springer Handbook of Ocean Engineering; Dhanak, M.R., Xiros, N.I., Eds.; Springer Handbooks; Springer: Cham, Switzerland, 2016; pp. 341–358. [Google Scholar] [CrossRef]
- Chen, Y.; Zheng, D.; Miller, P.A.; Farrell, J.A. Underwater Inertial Navigation with Long Baseline Transceivers: A Near-Real-Time Approach. IEEE Trans. Control Syst. Technol. 2016, 24, 240–251. [Google Scholar] [CrossRef]
- Claus, B.; Kepper IV, J.H.; Suman, S.; Kinsey, J.C. Closed-loop one-way-travel-time navigation using low-grade odometry for autonomous underwater vehicles. J. Field Robot. 2018, 35, 421–434. [Google Scholar] [CrossRef]
- Zhang, L.; Hsu, L.T.; Zhang, T. A Novel INS/USBL Integrated Navigation Scheme Via Factor Graph Optimization. IEEE Trans. Veh. Technol. 2022, 71, 1. [Google Scholar] [CrossRef]
- Noureldin, A.; Karamat, T.B.; Georgy, J. Fundamentals of Inertial Navigation, Satellite-Based Positioning and Their Integration; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Morin, P.; Eudes, A.; Scandaroli, G. Uniform Observability of Linear Time-Varying Systems and Application to Robotics Problems. In Proceedings of the Geometric Science of Information; Lecture Notes in Computer Science; Nielsen, F., Barbaresco, F., Eds.; Springer: Cham, Switzerland, 2017; pp. 336–344. [Google Scholar] [CrossRef]
- Tuna, S.E. Sufficient Conditions on Observability Grammian for Synchronization in Arrays of Coupled Linear Time-Varying Systems. IEEE Trans. Autom. Control 2010, 55, 2586–2590. [Google Scholar] [CrossRef]
- NIJMEIJER, H. Observability of autonomous discrete time non-linear systems: A geometric approach. Int. J. Control 1982, 36, 867–874. [Google Scholar] [CrossRef]
- Batista, P.; Silvestre, C.; Oliveira, P. Single range aided navigation and source localization: Observability and filter design. Syst. Control Lett. 2011, 60, 665–673. [Google Scholar] [CrossRef]
- Batista, P.; Silvestre, C.; Oliveira, P. Optimal position and velocity navigation filters for autonomous vehicles. Automatica 2010, 46, 767–774. [Google Scholar] [CrossRef]
- Chen, Z.; Jiang, K.; Hung, J. Local observability matrix and its application to observability analyses. In Proceedings of the IECON ’90: 16th Annual Conference of IEEE Industrial Electronics Society, Pacific Grove, CA, USA, 27–30 November 1990; Volume 1, pp. 100–103. [Google Scholar] [CrossRef]
- Northardt, T. Observability Criteron Guidance for Passive Towed Array Sonar Tracking. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3578–3585. [Google Scholar] [CrossRef]
- Wan, E.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No.00EX373), Lake Louise, AL, Canada, 1–4 October 2000; pp. 153–158. [Google Scholar] [CrossRef]
- Kepper, J.H.; Claus, B.C.; Kinsey, J.C. MEMS IMU and one-way-travel-time navigation for autonomous underwater vehicles. In Proceedings of the OCEANS 2017, Aberdeen, UK, 19–22 June 2017; pp. 1–9. [Google Scholar] [CrossRef]
- Groves, P. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House Publishers: London, UK, 2013. [Google Scholar]
- Jiang, J.; Yu, F.; Lan, H.; Dong, Q. Instantaneous Observability of Tightly Coupled SINS/GPS during Maneuvers. Sensors 2016, 16, 765. [Google Scholar] [CrossRef] [PubMed]
- Rhee, I.; Abdel-Hafez, M.; Speyer, J. Observability of an integrated GPS/INS during maneuvers. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 526–535. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field | Institution | Research |
|---|---|---|
| PASA | Defence Research Establishment Atlantic | Extended Towed Array Method |
| Naval Undersea Warfare Center of USA | The model-based space-time array processing approach | |
| Zhejiang University | Source depth estimation based on synthetic aperture beam-forming | |
| OWTT | University of Washington | Real-Time Under-Ice Acoustic Navigation |
| University of Rhode Island | Localization using broadband acoustic sources at long-range | |
| INS/OWTT integrated navigation | Woods Hole Oceanographic Institution | A Navigation Solution Using a MEMS IMU, Model-Based Dead- Reckoning, and OWTT Acoustic Range Measurements |
| Long-Range Acoustic Communications and Navigation in the Arctic | ||
| Closed-loop OWTT navigation using low-grade odometry for AUVs | ||
| Johns Hopkins University | Centralized extended Kalman filter based single beacon INS /OWTT navigation | |
| Passive single-beacon navigation | Massachusetts Institute of Technology | Passive inverted ultra-short baseline navigation using single beacon |
| Harbin Engineering University | Single beacon asynchronous navigation based on the phase difference |
| Set up parameters | |
| —the dimension of the state vector | |
| —the dimension of the measurement vector | |
| —a tuning parameter, commonly set to be | |
| —a tuning parameter, commonly set to be 2 | |
| —a tuning parameter, a heuristic rule commonly used is to set | |
| — | |
| —the weight value in state prediction | |
| —the weight value in state error covariance prediction | |
| —the system noise covariance matrix | |
| —the measurement noise covariance matrix | |
| —-the state error covariance matrix | |
| Generate sigma points | |
| Define as the Cholesky decomposition of . | —(SVD) |
| Define as the ith column of matrix . The total number of the sigma points is . | |
| State prediction | |
| Calculate the results after state transformation of all sigma points, and then calculate the weighted summation. | |
| State error covariance prediction | |
| Predict the state error covariance matrix. | |
| Update sigma points | |
| Generate the new sigma points after state prediction. | —(SVD) |
| Measurement prediction | |
| Predict the measurement vector by state vector. | |
| State update | |
| Update the state by introduce real measurement. | |
| Set up parameters | |
| —the dimension of the state vector | |
| —the dimension of the measurement vector | |
| —the definition of these parameters are the same as in Table 2 | |
| —the system noise covariance matrix | |
| —the measurement noise covariance matrix | |
| —the state error covariance matrix | |
| Generate sigma points | |
| —(SVD) | |
| State prediction | |
| State error covariance prediction | |
| Update sigma points | |
| —(SVD) | |
| Measurement prediction | |
| State update | |
| Update the state by introducing the real measurement, note that the updating step of is different. | |
| Step | Computational Complexity (N Is the Dimension of State Vector, L Is the Dimension of Measurement Vector) |
|---|---|
| Flops in State Prediction | |
| Flops in Measurement Update | |
| Flops in SVD | |
| Square Roots in Cholesky decomposition | N |
| Parameter | Value |
|---|---|
| Number of hydrophone elements | 10 |
| Spatial interval of elements | 5 m |
| Sample rate of hydrophone | 4000 Hz |
| Sample rate of IMU | 100 Hz |
| Time of simulation of each iteration | 450 s |
| Times of repetition | 50 |
| Initial distance between the beacon and the vehicle | 50 km |
| Voyage direction | East (yaw = 90) |
| Voyage speed | 2 m/s |
| Accuracy of depth sensor | 0.1 m |
| Accuracy of Compass | 0.1 |
| SNR | −20 dB |
| Frequency of narrowband signal | 100 Hz |
| Broadband signal (a period) | LFM ( Hz, 40 s) |
| Parameter | Value |
|---|---|
| Number of hydrophone elements | 10 |
| Spatial interval of elements | 5 m |
| Sample rate of hydrophone | 4000 Hz |
| Sample rate of IMU | 100 Hz |
| Duration of simulation | 2460 s, 4000 s |
| Times of repetition | 1 |
| Initial distance between the beacon and the vehicle | 50 km |
| Initial bearing angle | 0 |
| Voyage speed | 2 m/s |
| Accuracy of depth sensor | 0.1 m |
| Accuracy of Compass | 0.1 |
| SNR | −30 dB |
| Frequency of narrowband signal | 100 Hz |
| Broadband signal (a period) | LFM ( Hz, 40 s) |
| East ARMSE (m) | North ARMSE (m) | Total (m) | |
|---|---|---|---|
| INS Only | 608.48 | 966.39 | 1142.00 |
| Algo1 | 91.65 | 49.58 | 104.20 |
| Algo2 | 15.67 | 14.43 | 21.30 |
| Algo3 | 9.15 | 102.31 | 102.72 |
| Proposed | 20.47 | 25.77 | 32.91 |
| East ARMSE (m) | North ARMSE (m) | Total (m) | |
|---|---|---|---|
| INS Only | 453.30 | 947.77 | 1050.69 |
| Algo1 | 265.25 | 880.55 | 919.63 |
| Algo2 | 8.05 | 26.10 | 27.32 |
| Algo3 | 442.96 | 103.11 | 454.80 |
| Proposed | 155.89 | 79.39 | 174.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, Z.; Wang, W.; Wu, B.; Ye, L.; Ochieng, W.Y. Tightly Coupled INS/APS Passive Single Beacon Navigation. Remote Sens. 2023, 15, 1854. https://doi.org/10.3390/rs15071854
Zou Z, Wang W, Wu B, Ye L, Ochieng WY. Tightly Coupled INS/APS Passive Single Beacon Navigation. Remote Sensing. 2023; 15(7):1854. https://doi.org/10.3390/rs15071854
Chicago/Turabian StyleZou, Zhuoyang, Wenrui Wang, Bin Wu, Lingyun Ye, and Washington Yotto Ochieng. 2023. "Tightly Coupled INS/APS Passive Single Beacon Navigation" Remote Sensing 15, no. 7: 1854. https://doi.org/10.3390/rs15071854
APA StyleZou, Z., Wang, W., Wu, B., Ye, L., & Ochieng, W. Y. (2023). Tightly Coupled INS/APS Passive Single Beacon Navigation. Remote Sensing, 15(7), 1854. https://doi.org/10.3390/rs15071854