
Enhancing Land Cover Mapping and Monitoring: An Interactive and Explainable Machine Learning Approach Using Google Earth Engine



Abstract
:1. Introduction and Motivation
2. Approach
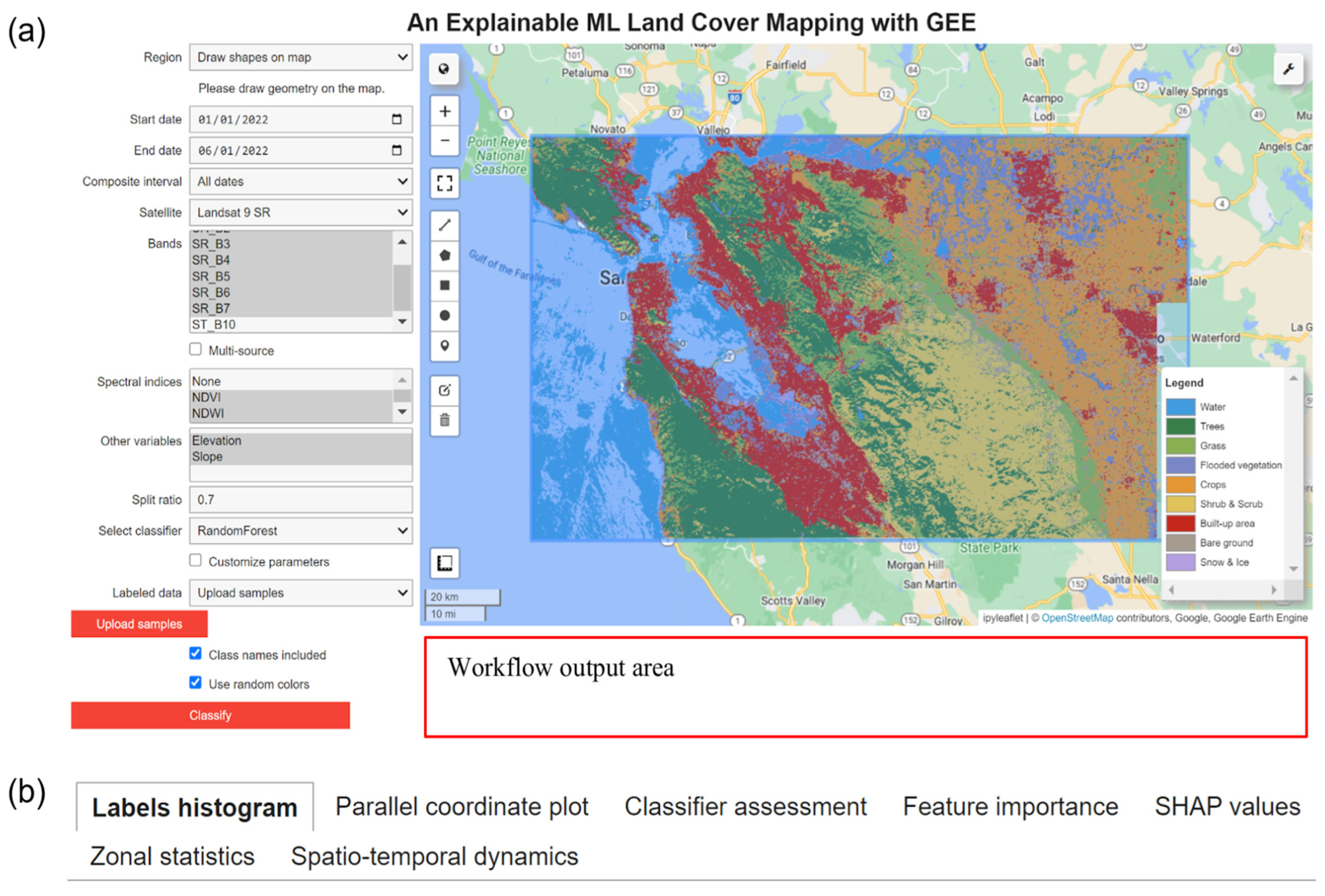
2.1. Implementation Overview
2.2. Workflow for Land Cover Classification
2.3. Post-Processing Visualization Toolkit
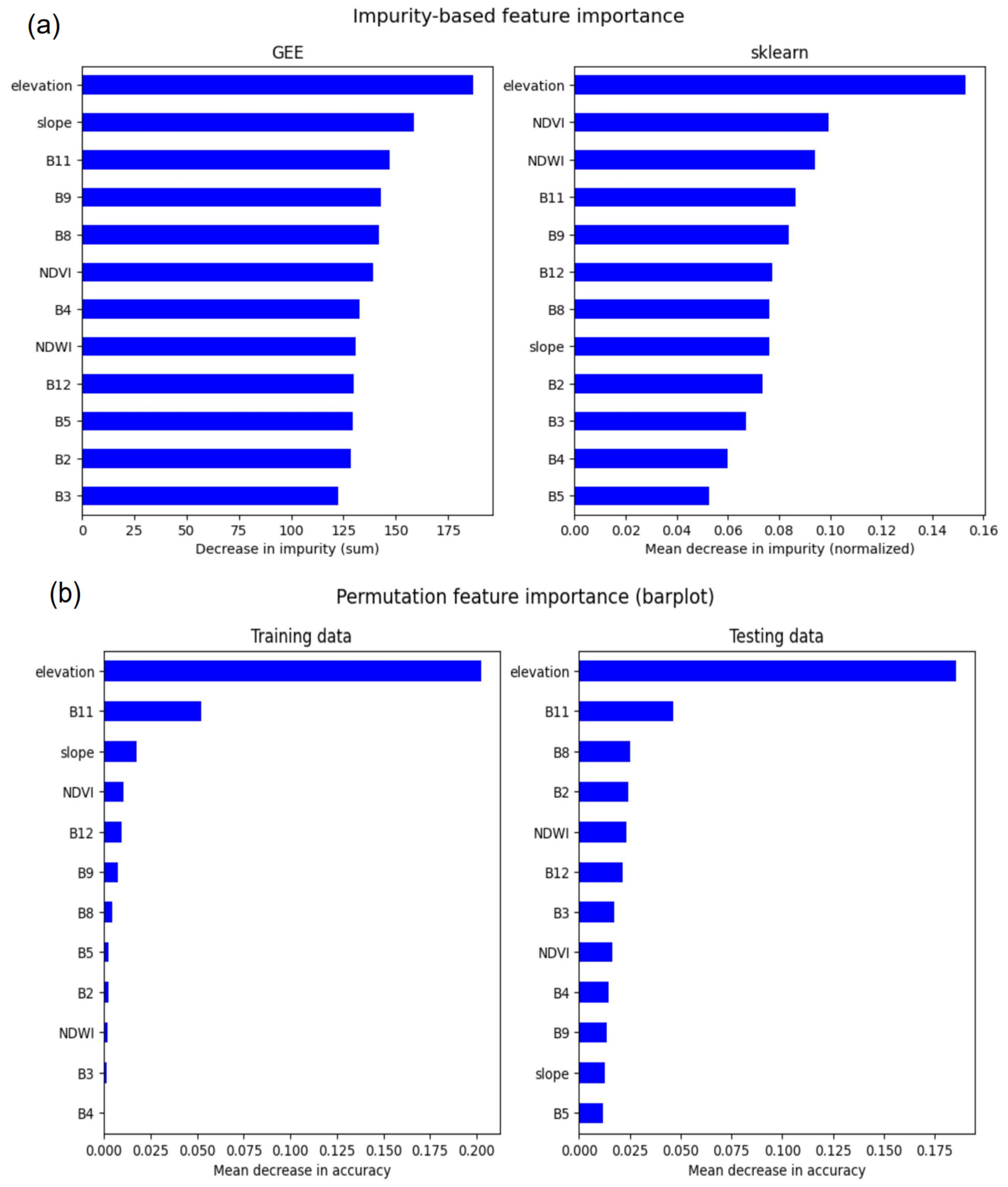
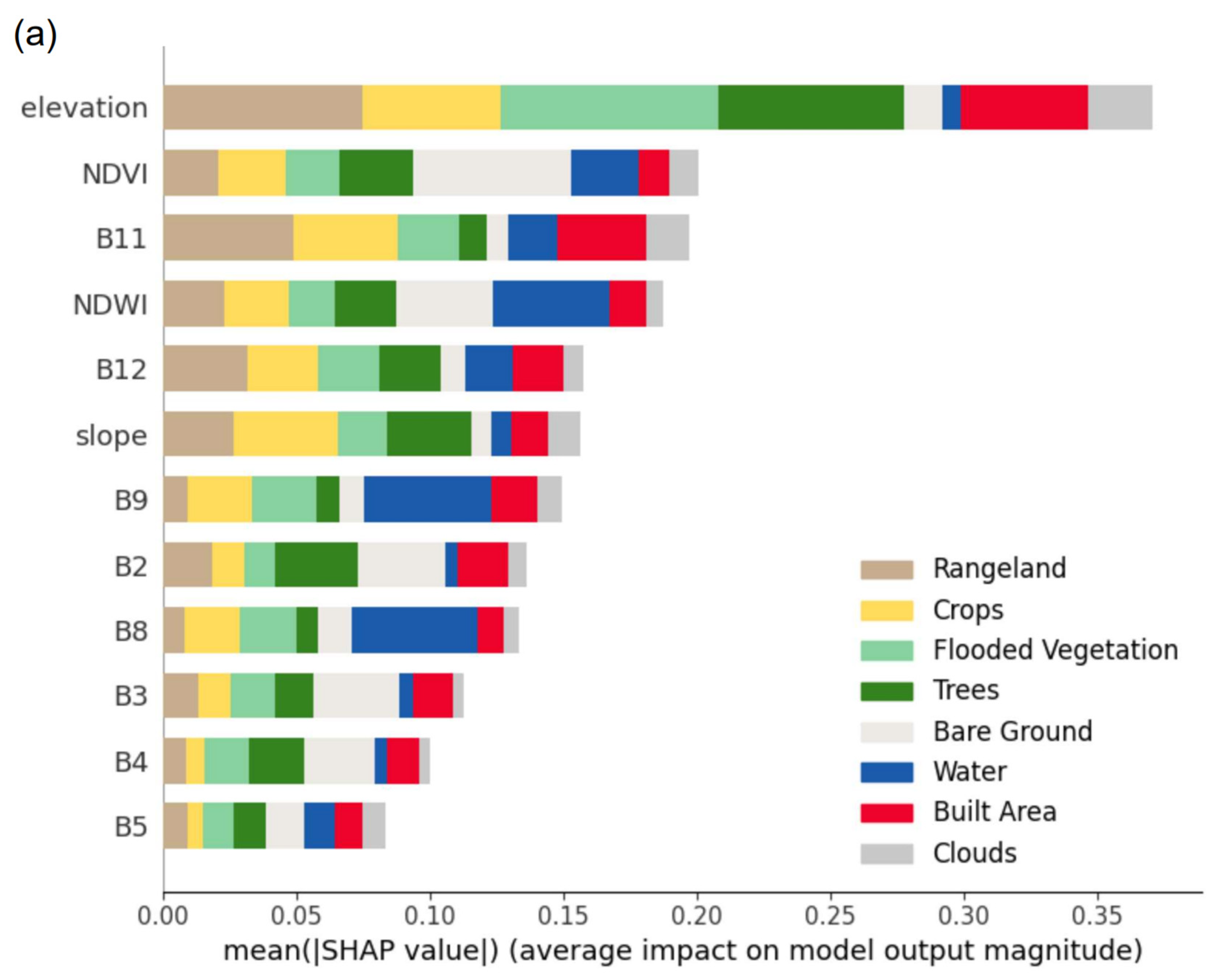
2.4. Feature Importance
2.5. Land Cover Change
3. Case Studies
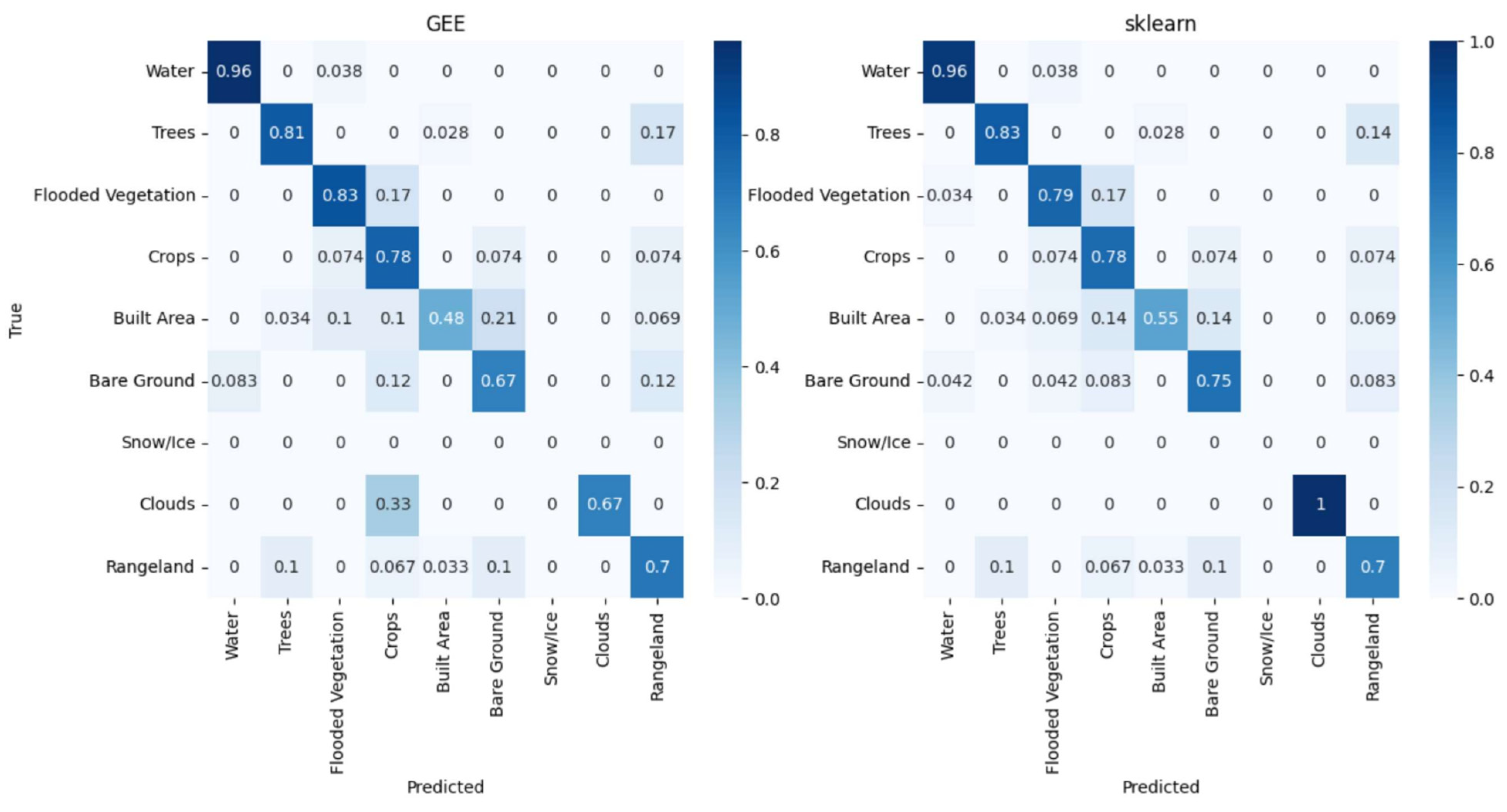
3.1. Land Cover Classification around San Francisco Bay
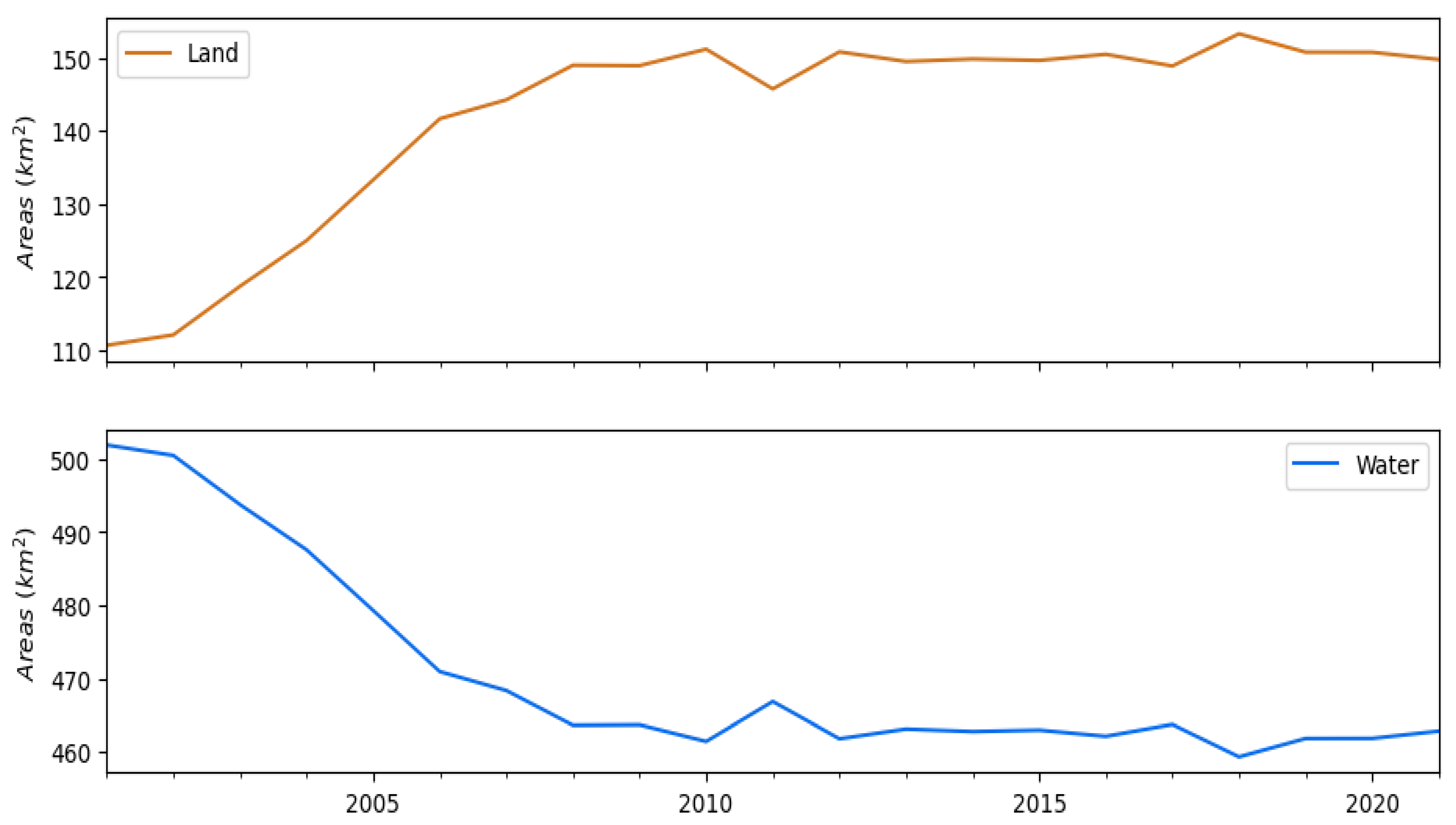
3.2. Land Cover Change off Dubai Coast
4. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AI | Artificial Intelligence |
| Colab | Google Colaboratory |
| CSV | Comma Separated Values |
| DL | Deep Learning |
| EO | Earth Observation |
| LULC | Land Use Land Cover |
| MDI | Mean Decrease in Impurity |
| ML | Machine Learning |
| NA | Not Applicable |
| NASA | Shuttle Radar Topography Mission |
| NBR | Normalized Burn Ratio |
| NDVI | Normalized Difference Vegetation Index |
| NDWI | Normalized Difference Water Index |
| PCP | Parallel Coordinate Plot |
| RF | Random Forest |
| RS | Remote Sensing |
| ROI | Region Of Interest |
| SHAP | Shapley Additive Explanations |
| SR | Surface Reflectance |
| SRTM | Shuttle Radar Topography Mission |
| TOA | Top-of-Atmosphere |
| XAI | Explainable Artificial Intelligence |
References
- Meske, C.; Bunde, E.; Schneider, J.; Gersch, M. Explainable Artificial Intelligence: Objectives, Stakeholders, and Future Research Opportunities. Inf. Syst. Manag. 2022, 39, 53–63. [Google Scholar] [CrossRef]
- Lary, D.J.; Alavi, A.H.; Gandomi, A.H.; Walker, A.L. Machine Learning in Geosciences and Remote Sensing. Geosci. Front. 2016, 7, 3–10. [Google Scholar] [CrossRef]
- Mamalakis, A.; Ebert-Uphoff, I.; Barnes, E.A. Explainable Artificial Intelligence in Meteorology and Climate Science: Model Fine-Tuning, Calibrating Trust and Learning New Science. In xxAI—Beyond Explainable AI: International Workshop, Held in Conjunction with ICML 2020, 18 July 2020, Vienna, Austria, Revised and Extended Papers; Holzinger, A., Goebel, R., Fong, R., Moon, T., Müller, K.-R., Samek, W., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 315–339. ISBN 9783031040832. [Google Scholar]
- Wulder, M.A.; Roy, D.P.; Radeloff, V.C.; Loveland, T.R.; Anderson, M.C.; Johnson, D.M.; Healey, S.; Zhu, Z.; Scambos, T.A.; Pahlevan, N.; et al. Fifty Years of Landsat Science and Impacts. Remote Sens. Environ. 2022, 280, 113195. [Google Scholar] [CrossRef]
- Yang, L.; Driscol, J.; Sarigai, S.; Wu, Q.; Chen, H.; Lippitt, C.D. Google Earth Engine and Artificial Intelligence (AI): A Comprehensive Review. Remote Sens. 2022, 14, 3253. [Google Scholar] [CrossRef]
- Barnes, E.A.; Hurrell, J.W.; Ebert-Uphoff, I.; Anderson, C.; Anderson, D. Viewing Forced Climate Patterns through an AI Lens. Geophys. Res. Lett. 2019, 46, 13389–13398. [Google Scholar] [CrossRef]
- Bergen, K.J.; Johnson, P.A.; de Hoop, M.V.; Beroza, G.C. Machine Learning for Data-Driven Discovery in Solid Earth Geoscience. Science 2019, 363, eaau0323. [Google Scholar] [CrossRef] [PubMed]
- Karpatne, A.; Ebert-Uphoff, I.; Ravela, S.; Babaie, H.A.; Kumar, V. Machine Learning for the Geosciences: Challenges and Opportunities. IEEE Trans. Knowl. Data Eng. 2019, 31, 1544–1554. [Google Scholar] [CrossRef]
- Reichstein, M.; Camps-Valls, G.; Stevens, B.; Jung, M.; Denzler, J.; Carvalhais, N. Prabhat Deep Learning and Process Understanding for Data-Driven Earth System Science. Nature 2019, 566, 195–204. [Google Scholar] [CrossRef]
- Gevaert, C.M. Explainable AI for Earth Observation: A Review Including Societal and Regulatory Perspectives. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102869. [Google Scholar] [CrossRef]
- Minh, D.; Wang, H.X.; Li, Y.F.; Nguyen, T.N. Explainable Artificial Intelligence: A Comprehensive Review. Artif. Intell. Rev. 2022, 55, 3503–3568. [Google Scholar] [CrossRef]
- Samek, W.; Montavon, G.; Vedaldi, A.; Hansen, L.K.; Müller, K.-R. Explainable AI: Interpreting, Explaining and Visualizing Deep Learning; Springer Nature: Cham, Switzerland, 2019; ISBN 9783030289546. [Google Scholar]
- Yang, G.; Ye, Q.; Xia, J. Unbox the Black-Box for the Medical Explainable AI via Multi-Modal and Multi-Centre Data Fusion: A Mini-Review, Two Showcases and beyond. Inf. Fusion 2022, 77, 29–52. [Google Scholar] [CrossRef]
- Barredo Arrieta, A.; Díaz-Rodríguez, N.; Del Ser, J.; Bennetot, A.; Tabik, S.; Barbado, A.; Garcia, S.; Gil-Lopez, S.; Molina, D.; Benjamins, R.; et al. Explainable Artificial Intelligence (XAI): Concepts, Taxonomies, Opportunities and Challenges toward Responsible AI. Inf. Fusion 2020, 58, 82–115. [Google Scholar] [CrossRef]
- Adadi, A.; Berrada, M. Peeking Inside the Black-Box: A Survey on Explainable Artificial Intelligence (XAI). IEEE Access 2018, 6, 52138–52160. [Google Scholar] [CrossRef]
- Roscher, R.; Bohn, B.; Duarte, M.F.; Garcke, J. Explainable Machine Learning for Scientific Insights and Discoveries. IEEE Access 2020, 8, 42200–42216. [Google Scholar] [CrossRef]
- Yang, L.; MacEachren, A.M.; Mitra, P.; Onorati, T. Visually-Enabled Active Deep Learning for (geo) Text and Image Classification: A Review. ISPRS Int. J. 2018, 7, 65. [Google Scholar] [CrossRef]
- Hall, O.; Ohlsson, M.; Rögnvaldsson, T. A Review of Explainable AI in the Satellite Data, Deep Machine Learning, and Human Poverty Domain. Patterns 2022, 3, 100600. [Google Scholar] [CrossRef] [PubMed]
- Belgiu, M.; Drăguţ, L. Random Forest in Remote Sensing: A Review of Applications and Future Directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Lundberg, S.M.; Lee, S.-I. A Unified Approach to Interpreting Model Predictions. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Hosseiny, B.; Abdi, A.M.; Jamali, S. Urban Land Use and Land Cover Classification with Interpretable Machine Learning—A Case Study Using Sentinel-2 and Auxiliary Data. Remote Sens. Appl. Soc. Environ. 2022, 28, 100843. [Google Scholar] [CrossRef]
- Iban, M.C.; Bilgilioglu, S.S. Snow Avalanche Susceptibility Mapping Using Novel Tree-Based Machine Learning Algorithms (XGBoost, NGBoost, and LightGBM) with eXplainable Artificial Intelligence (XAI) Approach. Stoch. Environ. Res. Risk Assess. 2023, 37, 2243–2270. [Google Scholar] [CrossRef]
- Pradhan, B.; Lee, S.; Dikshit, A.; Kim, H. Spatial Flood Susceptibility Mapping Using an Explainable Artificial Intelligence (XAI) Model. Geosci. Front. 2023, 14, 101625. [Google Scholar] [CrossRef]
- Dahal, A.; Lombardo, L. Explainable Artificial Intelligence in Geoscience: A Glimpse into the Future of Landslide Susceptibility Modeling. Comput. Geosci. 2023, 176, 105364. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-Scale Geospatial Analysis for Everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Velastegui-Montoya, A.; Montalván-Burbano, N.; Carrión-Mero, P.; Rivera-Torres, H.; Sadeck, L.; Adami, M. Google Earth Engine: A Global Analysis and Future Trends. Remote Sens. 2023, 15, 3675. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-Resolution Global Maps of 21st-Century Forest Cover Change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-Resolution Mapping of Global Surface Water and Its Long-Term Changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Koo, Y.; Xie, H.; Mahmoud, H.; Iqrah, J.M.; Ackley, S.F. Automated Detection and Tracking of Medium-Large Icebergs from Sentinel-1 Imagery Using Google Earth Engine. Remote Sens. Environ. 2023, 296, 113731. [Google Scholar] [CrossRef]
- Wu, Q. Geemap: A Python Package for Interactive Mapping with Google Earth Engine. J. Open Source Softw. 2020, 5, 2305. [Google Scholar] [CrossRef]
- Gatis, N.; Carless, D.; Luscombe, D.J.; Brazier, R.E.; Anderson, K. An Operational Land Cover and Land Cover Change Toolbox: Processing Open-source Data with Open-source Software. Ecol. Solut. Evid. 2022, 3, e12162. [Google Scholar] [CrossRef]
- Buscombe, D.; Goldstein, E.B. A Reproducible and Reusable Pipeline for Segmentation of Geoscientific Imagery. Earth Space Sci. 2022, 9, e2022EA002332. [Google Scholar] [CrossRef]
- Murray, N.J.; Keith, D.A.; Simpson, D.; Wilshire, J.H.; Lucas, R.M. Remap: An Online Remote Sensing Application for Land Cover Classification and Monitoring. Methods Ecol. Evol. 2018, 9, 2019–2027. [Google Scholar] [CrossRef]
- Xing, H.; Hou, D.; Wang, S.; Yu, M.; Meng, F. O-LCMapping: A Google Earth Engine-Based Web Toolkit for Supporting Online Land Cover Classification. Earth Sci. Inf. 2021, 14, 529–541. [Google Scholar] [CrossRef]
- Temenos, A.; Temenos, N.; Kaselimi, M.; Doulamis, A.; Doulamis, N. Interpretable Deep Learning Framework for Land Use and Land Cover Classification in Remote Sensing Using SHAP. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Ipywidgets: Interactive Widgets for the Jupyter Notebook. Available online: https://github.com/jupyter-widgets/ipywidgets (accessed on 27 July 2023).
- Ipyleaflet: A Jupyter—Leaflet.js Bridge. Available online: https://github.com/jupyter-widgets/ipyleaflet (accessed on 27 July 2023).
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-Learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Shap: A Game Theoretic Approach to Explain the Output of Any Machine Learning Model. Available online: https://github.com/shap/shap (accessed on 27 July 2023).
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45, RG2004. [Google Scholar] [CrossRef]
- Zanaga, D.; Van De Kerchove, R.; De Keersmaecker, W.; Souverijns, N.; Brockmann, C.; Quast, R.; Wevers, J.; Grosu, A.; Paccini, A.; Vergnaud, S.; et al. ESA WorldCover 10 M 2020 v100. 2021. Available online: https://zenodo.org/record/5571936 (accessed on 13 September 2023).
- Zanaga, D.; Van De Kerchove, R.; Daems, D.; De Keersmaecker, W.; Brockmann, C.; Kirches, G.; Wevers, J.; Cartus, O.; Santoro, M.; Fritz, S.; et al. ESA WorldCover 10 M 2021 v200. 2022. Available online: https://zenodo.org/record/7254221 (accessed on 13 September 2023).
- Karra, K.; Kontgis, C.; Statman-Weil, Z.; Mazzariello, J.C.; Mathis, M.; Brumby, S.P. Global Land Use / Land Cover with Sentinel 2 and Deep Learning. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 4704–4707. [Google Scholar]
- Brown, C.F.; Brumby, S.P.; Guzder-Williams, B.; Birch, T.; Hyde, S.B.; Mazzariello, J.; Czerwinski, W.; Pasquarella, V.J.; Haertel, R.; Ilyushchenko, S.; et al. Dynamic World, Near Real-Time Global 10 M Land Use Land Cover Mapping. Sci. Data 2022, 9, 1251. [Google Scholar] [CrossRef]
- Venter, Z.S.; Barton, D.N.; Chakraborty, T.; Simensen, T.; Singh, G. Global 10 M Land Use Land Cover Datasets: A Comparison of Dynamic World, World Cover and Esri Land Cover. Remote Sens. 2022, 14, 4101. [Google Scholar] [CrossRef]
- ee.Classifier.smileRandomForest|Google Earth Engine|Google for Developers. Available online: https://developers.google.com/earth-engine/apidocs/ee-classifier-smilerandomforest (accessed on 27 July 2023).
- Scikit-Learn: Scikit-Learn: Machine Learning in Python. Available online: https://github.com/scikit-learn/scikit-learn (accessed on 27 July 2023).
- Mahdianpari, M.; Jafarzadeh, H.; Granger, J.E.; Mohammadimanesh, F.; Brisco, B.; Salehi, B.; Homayouni, S.; Weng, Q. A Large-Scale Change Monitoring of Wetlands Using Time Series Landsat Imagery on Google Earth Engine: A Case Study in Newfoundland. GISci. Remote Sens. 2020, 57, 1102–1124. [Google Scholar] [CrossRef]
- Amani, M.; Kakooei, M.; Ghorbanian, A.; Warren, R.; Mahdavi, S.; Brisco, B.; Moghimi, A.; Bourgeau-Chavez, L.; Toure, S.; Paudel, A.; et al. Forty Years of Wetland Status and Trends Analyses in the Great Lakes Using Landsat Archive Imagery and Google Earth Engine. Remote Sens. 2022, 14, 3778. [Google Scholar] [CrossRef]
- Zhao, F.; Feng, S.; Xie, F.; Zhu, S.; Zhang, S. Extraction of Long Time Series Wetland Information Based on Google Earth Engine and Random Forest Algorithm for a Plateau Lake Basin—A Case Study of Dianchi Lake, Yunnan Province, China. Ecol. Indic. 2023, 146, 109813. [Google Scholar] [CrossRef]
- León-Pérez, M.C.; Reisinger, A.S.; Gibeaut, J.C. Spatial-Temporal Dynamics of Decaying Stages of Pelagic Sargassum Spp. along Shorelines in Puerto Rico Using Google Earth Engine. Mar. Pollut. Bull. 2023, 188, 114715. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good Practices for Estimating Area and Assessing Accuracy of Land Change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Image Collection ID in GEE | Bands | Date Availability |
|---|---|---|---|
| L7 SR | LANDSAT/LE07/C02/T1_L2 | SR_B1–SR_B5, SR_B7, ST_B6 | 28 May 1999–29 March 2023 |
| L7 TOA | LANDSAT/LE07/C02/T1_TOA | B1–B5, B7–B8 | 28 May 1999–29 March 2023 |
| L8 SR | LANDSAT/LC08/C02/T1_L2 | SR_B1–SR_B7, ST_B10 | April 2013–Present |
| L8 TOA | LANDSAT/LC08/C02/T1_TOA | B1–B11 | April 2013–Present |
| L9 SR | LANDSAT/LC09/C02/T1_L2 | SR_B1–SR_B7, ST_B10 | October 2021–Present |
| L8 TOA | LANDSAT/LC09/C02/T1_TOA | B1–B11 | October 2021–Present |
| Sentinel-2 SR Level-2A | COPERNICUS/S2_SR_HARMONIZED | B1–B12, B8A | 28 March 2017–Present |
| Sentinel-2 TOA Level-1C | COPERNICUS/S2_HARMONIZED | B1–B12, B8A | 23 June 2015–Present |
| Spectral indices | NDVI, NDWI, NBR | NA | NA |
| Topographic variables | USGS/SRTMGL1_003 | Elevation (slope) | 11 February 2000–22 February 2000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Yang, L.; Wu, Q. Enhancing Land Cover Mapping and Monitoring: An Interactive and Explainable Machine Learning Approach Using Google Earth Engine. Remote Sens. 2023, 15, 4585. https://doi.org/10.3390/rs15184585
Chen H, Yang L, Wu Q. Enhancing Land Cover Mapping and Monitoring: An Interactive and Explainable Machine Learning Approach Using Google Earth Engine. Remote Sensing. 2023; 15(18):4585. https://doi.org/10.3390/rs15184585
Chicago/Turabian StyleChen, Haifei, Liping Yang, and Qiusheng Wu. 2023. "Enhancing Land Cover Mapping and Monitoring: An Interactive and Explainable Machine Learning Approach Using Google Earth Engine" Remote Sensing 15, no. 18: 4585. https://doi.org/10.3390/rs15184585
APA StyleChen, H., Yang, L., & Wu, Q. (2023). Enhancing Land Cover Mapping and Monitoring: An Interactive and Explainable Machine Learning Approach Using Google Earth Engine. Remote Sensing, 15(18), 4585. https://doi.org/10.3390/rs15184585