
Urban Building Mesh Polygonization Based on Plane-Guided Segmentation, Topology Correction and Corner Point Clump Optimization


Abstract
:
1. Introduction
- (1)
- Plane extraction—Due to surface defects of the model and deficiencies in existing plane-segmentation methods, there are problems of undersegmentation or oversegmentation, resulting in the inability to extract a concise and appropriate segmented plane structure;
- (2)
- Topological connections—Buildings are usually composed of many segmented planes, and topology is the connection relationship between planes. However, the unreliability of plane segmentation leads to problems of missing topology and incorrect connections between planes.
- (3)
- Accuracy—Due to limitations of the construction methods and the complexity of the original model, the closeness of the resulting polyhedral model to the original input model is often unsatisfactory.
2. Literature Review
2.1. Lightweight or Polygonization Mesh Model
2.2. Planar Shape Detection
2.3. Planar Slicing and Assembly
2.4. Conclusions of the Literature Review
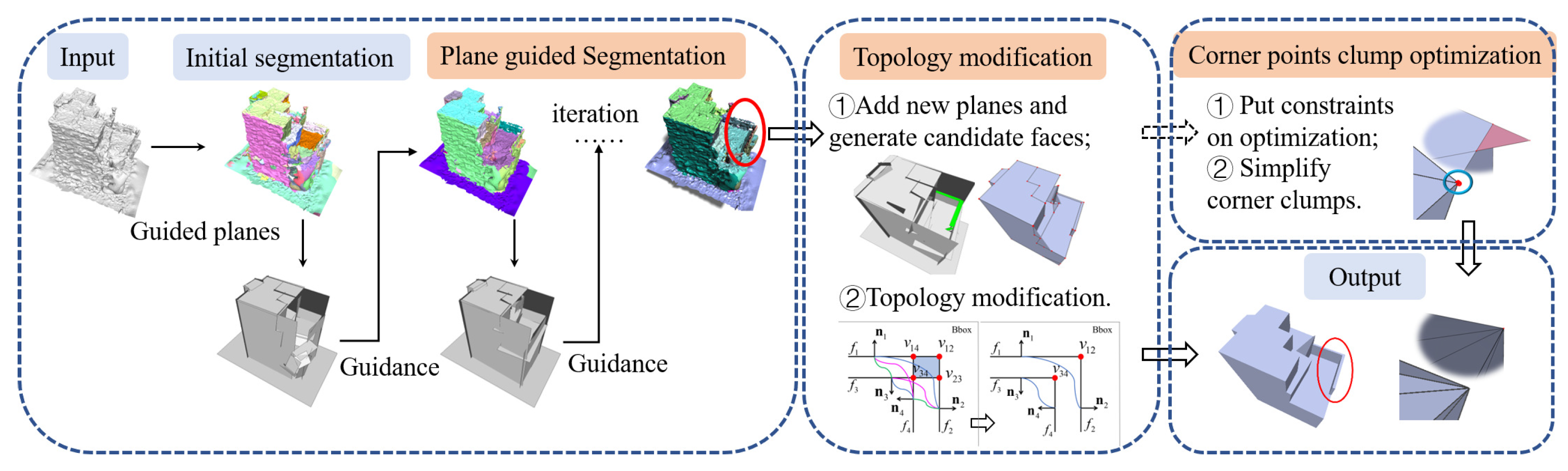
3. Methods
3.1. Guided-Based Planar Segmentation
| Algorithm 1: Guided mesh plane segmentation framework. |
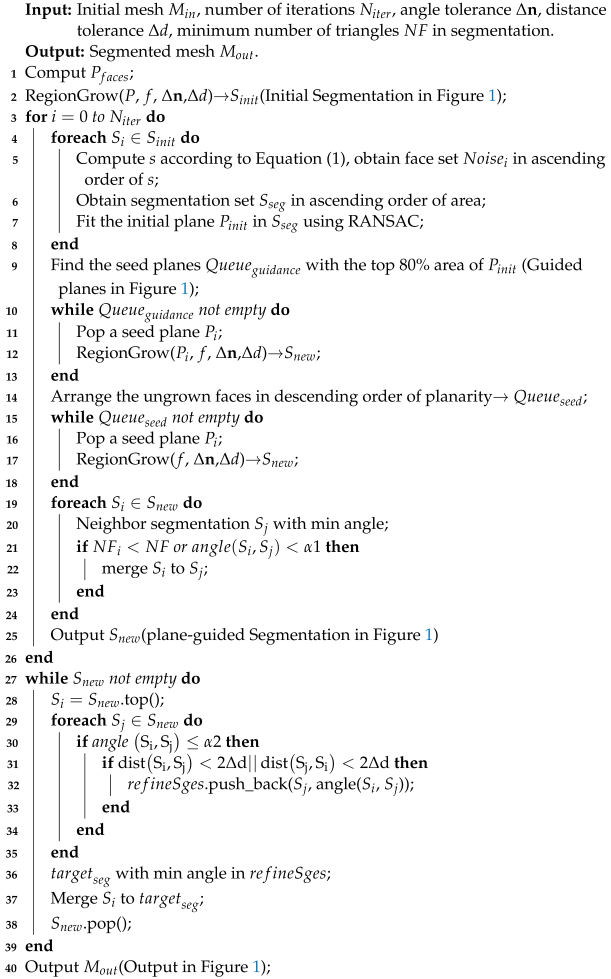 |
3.2. Topology Correction for Thin-Plate Structures
- (1)
- (2)
- Add a new top facade and define the topological relationship, as shown in Figure 5. First, we find the location of the new top surface. We obtain the smaller of segmentation and through their bounding box (i.e., Bbox); then, if the values of and are similar, we add a new plane that is both adjacent and perpendicular to and in the topology diagram. If the difference between and is large, it means that the elevations of the two facades are different, and a new plane is added at the lower elevation position. Finally, we define the topological relationship of the added top surface. The added top surface is adjacent to and . If and have a common neighboring facade, then should also be adjacent to their common facade, where the facade is the face that is nearly perpendicular to the ground.
- (3)
- Add new side facades and define the topological relationship, as shown in Figure 5. Obtain the location of the new facade: we find the location of the new facade by a 2-dimensional projection. Specifically, we project the Bbox of and to the 2-dimensional ground to obtain line segments and , and the two endpoints of the line segments are denoted as , and , , as shown in Figure 6. There are two cases:
- Adding a new facade—If, in addition to , the segmentation adjoins only one other segmentation or adjoins two facades with a distance less than , a new facade is needed. The Bbox of segmentation is also projected onto to obtain the line segment . If is the endpoint of line segment and is further away from line segment , then the newly added elevation will pass through endpoint . Define the topology of : as adjacent and perpendicular to the planes corresponding to and ; the 2-dimensional projection is represented by the red dashed segment in Figure 6b, while is also adjacent and perpendicular to the top surface . Note that is connected to the horizontal plane adjacent to the smaller segmentation in and .
- Adding two new facades—If is not adjacent to any other facade except , then two new facades are needed. The two new facades and pass through the endpoints and . Define the topology of and : and as adjacent and perpendicular to the plane in which and are located, and is connected to the horizontal plane adjacent to the smaller segmented plane in and . The 2-dimensional projection is represented by the red dashed segment in Figure 6c.
Topology of the added side facades: the newly added facade is adjacent to and and to their common nonfacade surfaces (the top and bottom adjacent faces). - (4)
- Remove the incorrect topological connection of the reverse parallel facade present in a thin plate (the green connecting line in Figure 7b).
- (5)
- The coverage region of the newly added plane—In the segmented planes and , triangles for which the distance from their center of mass to the newly added plane is within the specified range (the point-to-plane distance is less than the average side length) belong to the covered triangles of this newly added plane.
- (6)
- Merge planes that are coplanar and codirectional.
- (7)
- Topology correction of the inner and outer surfaces of the adjacent thin plates—Since it is difficult for the segmentation model to take into account thin and narrow areas existing in the building structure, the inner and outer surfaces of two adjacent thin plates are also connected incorrectly in the topology diagram, as indicated by the purple curve in Figure 7b. Figure 7b,c are 2D schematics of the local area of the thin plate in Figure 5, where the connection of facades and and and adds two new intersections and , respectively. This adds a very small candidate surface at the corner of the thin-plate structure (the colored area of the 2D schematic in Figure 7b); however, this candidate surface is very easily lost in the optimization process, which eventually causes the thin-plate structure to be missing. In fact, in the actual building structure, and and and should not be connected. To solve this problem, we propose “topology correction of the inner and outer surfaces of a thin plate” to eliminate this kind of incorrect topology connection. Determination of the inner and outer facades of a thin plates: We intersect the center normal of the thin plate with the plane in which all the candidate surfaces are located. If the intersection point is inside the Bbox, then the plane is the inner surface of the thin plate; if there is no intersection point or the intersection point is outside the Bbox, then the plane is the outer surface. According to the geometric rules of the actual building structure, we stipulate that the inner and outer surfaces of the thin plate are not connected to each other, so the incorrect topological connections (the purple connections in Figure 7b) between the inner and outer and and and of the thin plate are eliminated, as shown in Figure 7c. The top of the thin plate is not cut into multiple small areas, which makes it more likely that the thin plate structure will not be lost during optimization.
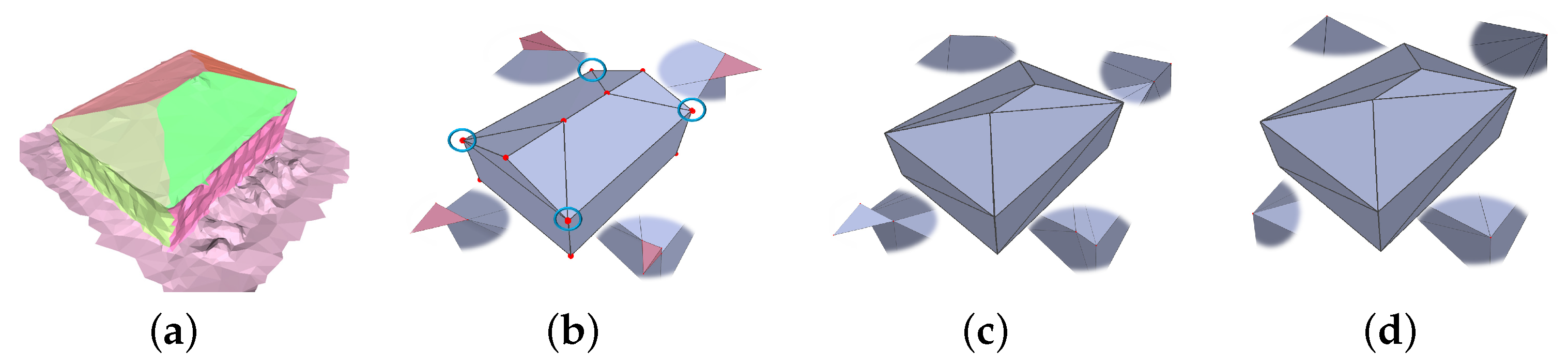
3.3. Corner Point Clump Optimization and Polyhedron Construction
4. Results
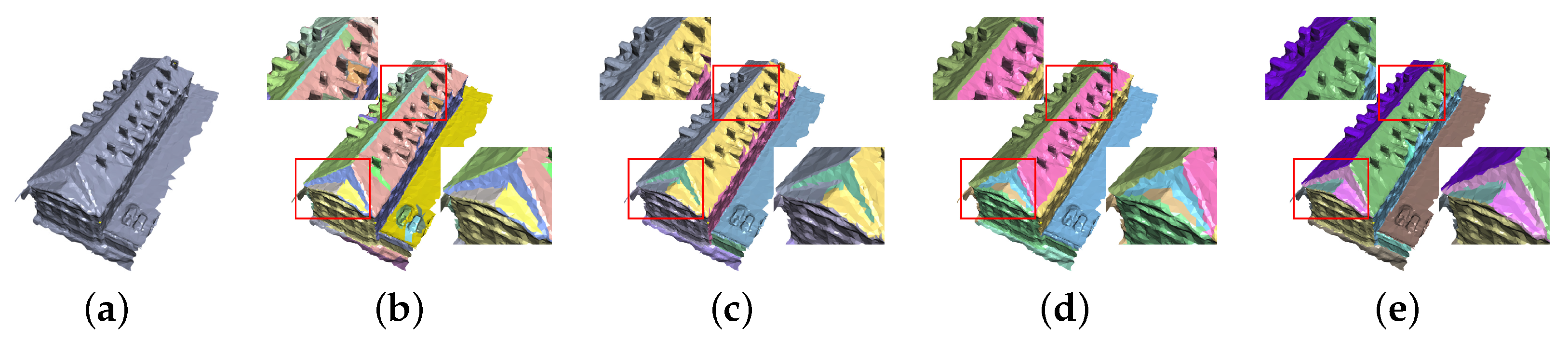
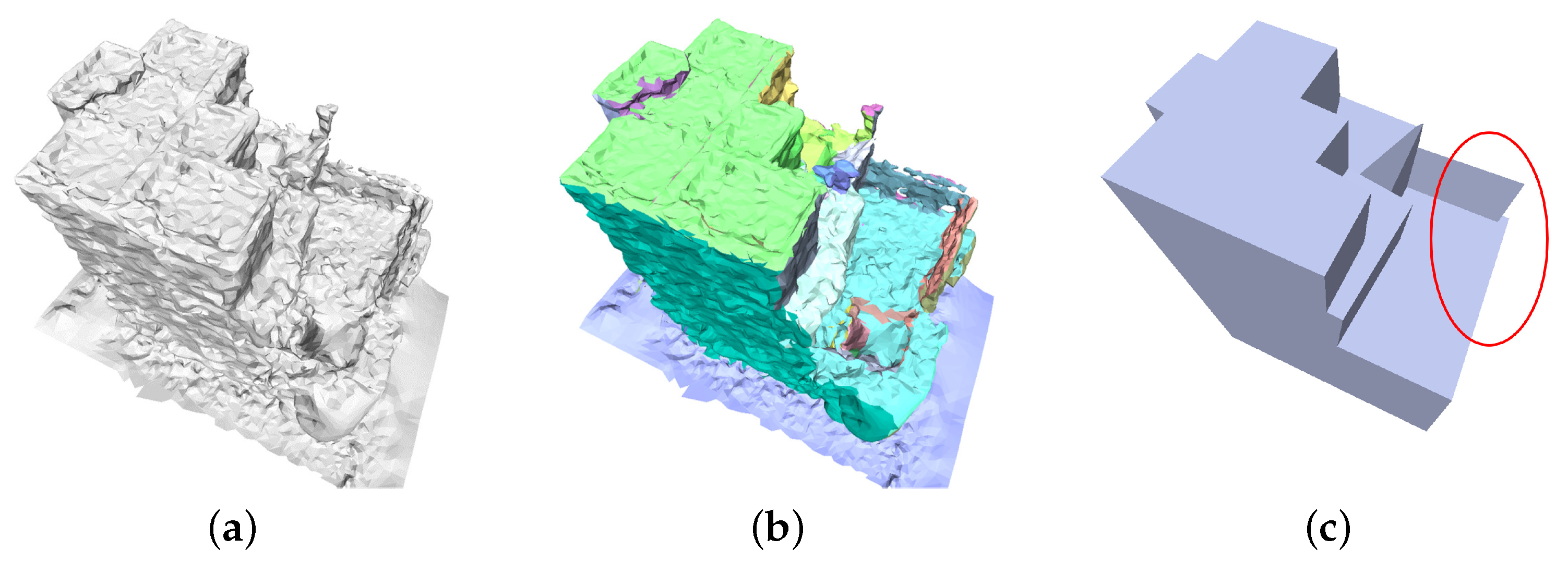
4.1. Qualitative Assessment Experiments
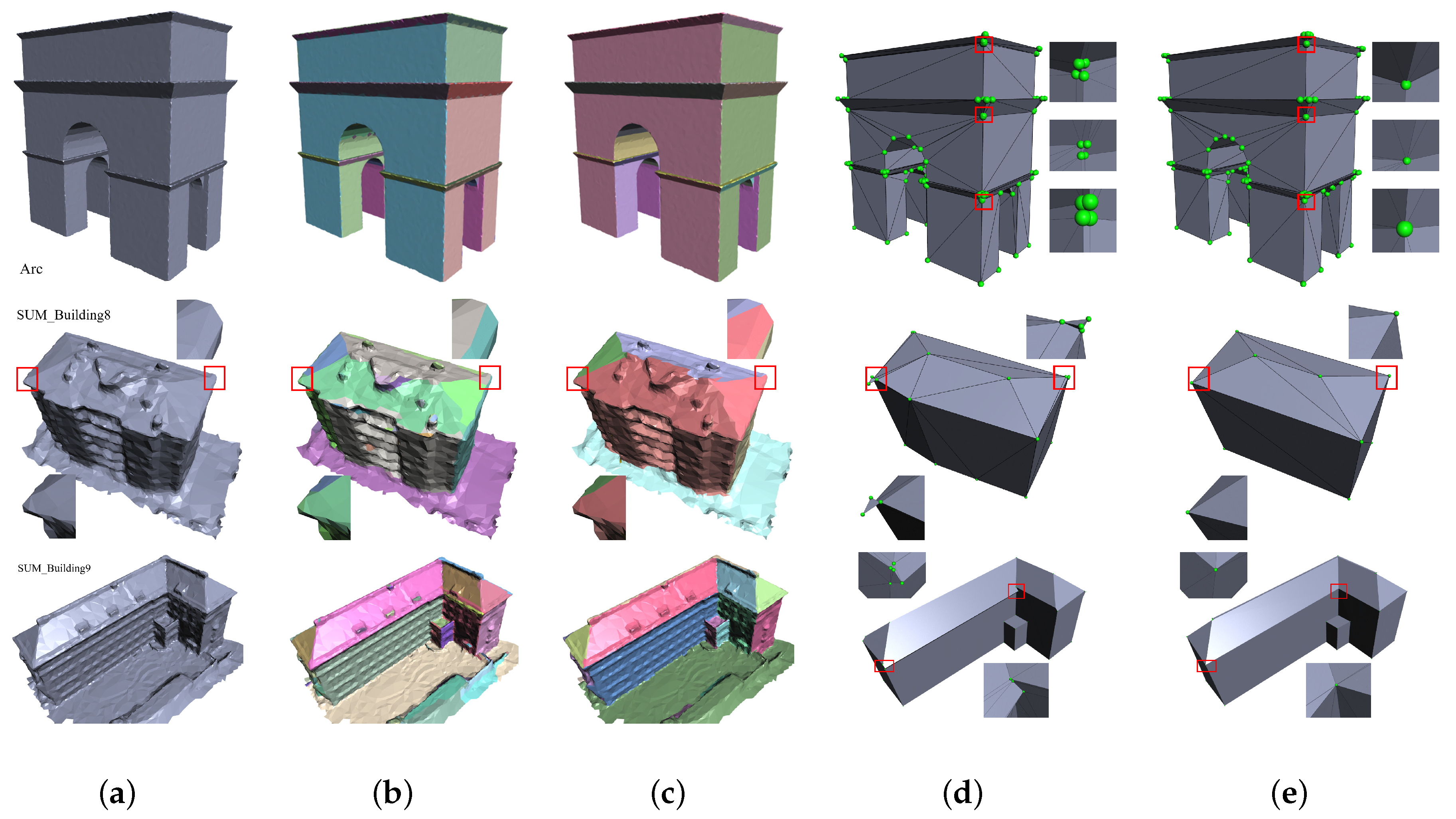
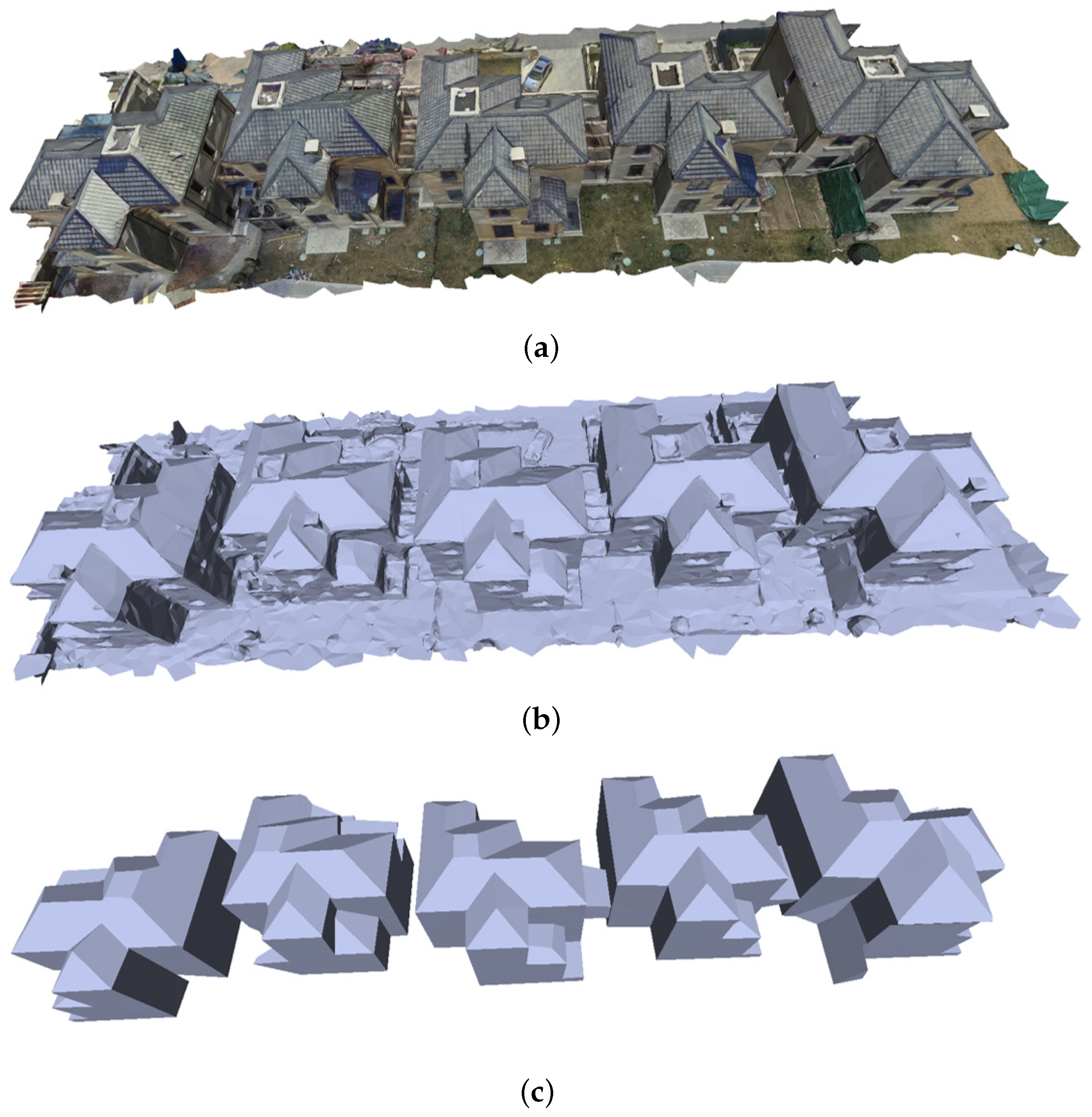
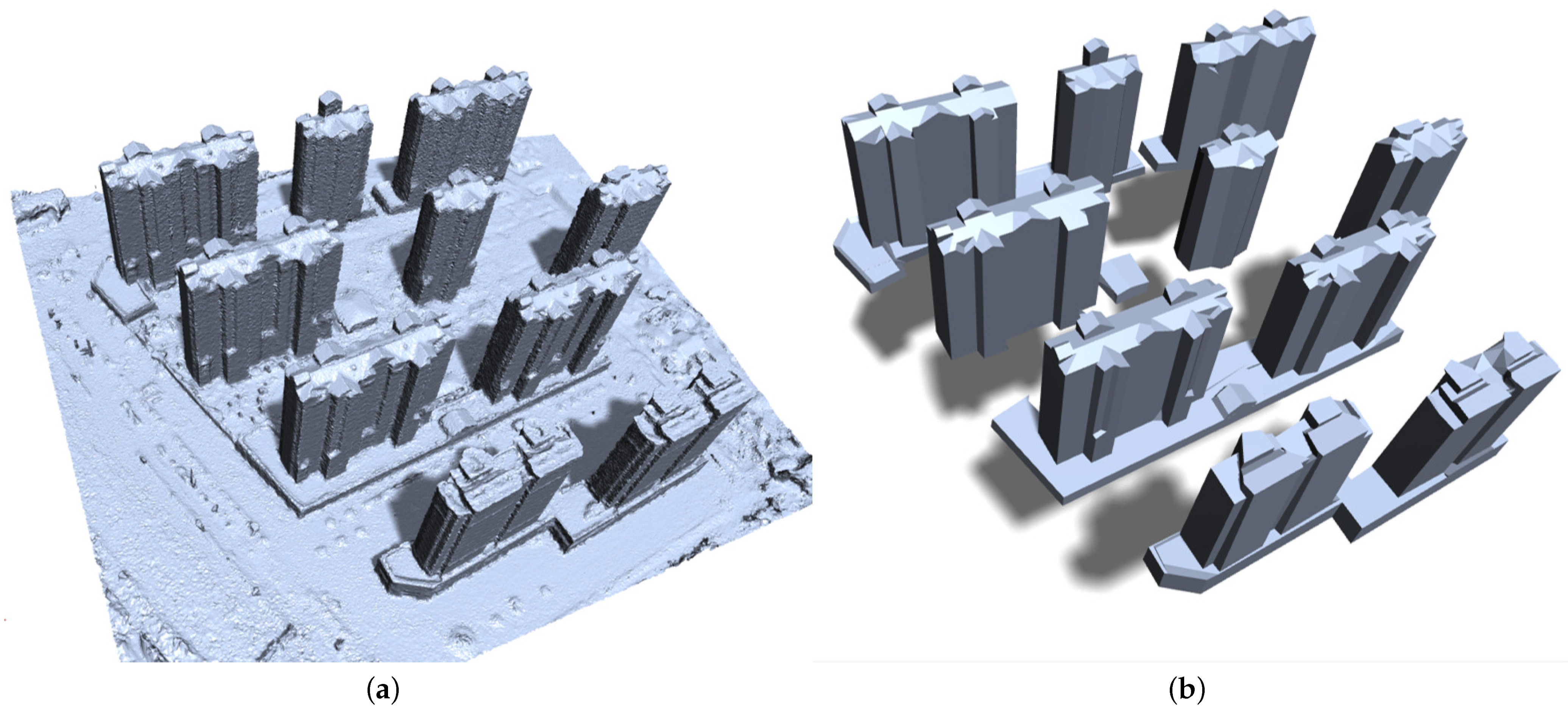
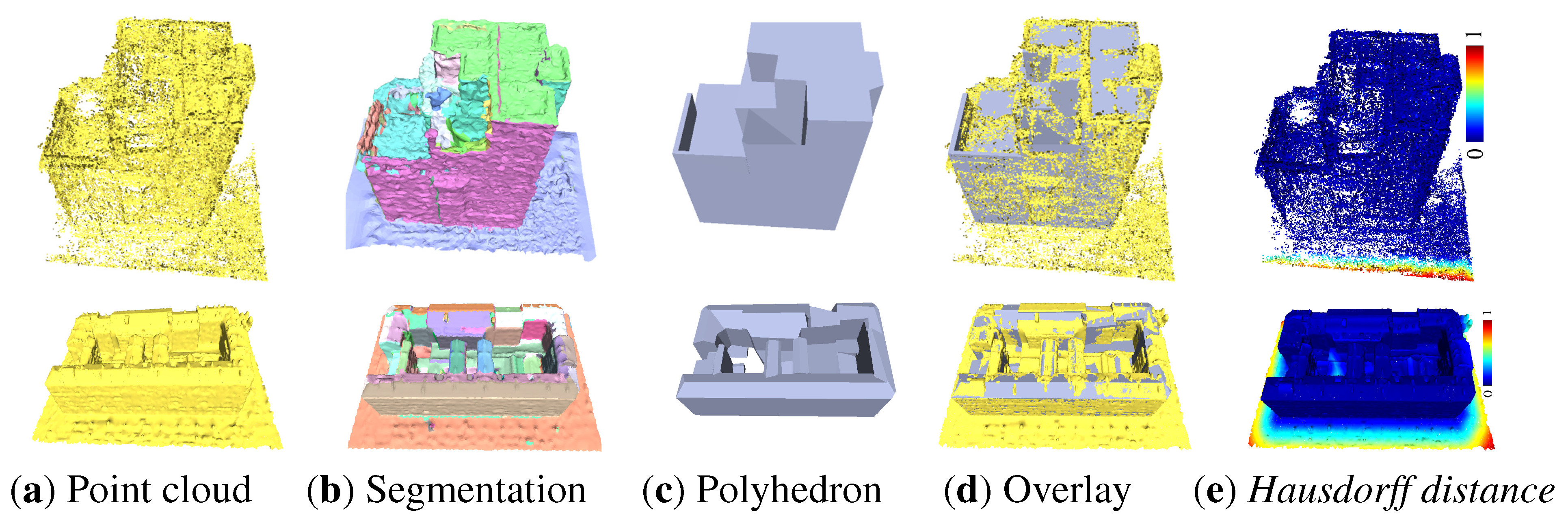
4.1.1. Qualitative Comparison of the Segmentation and Polyhedral Results
4.1.2. Qualitative Comparison of Structure-Aware Results
4.2. Quantitative Evaluation Experiments
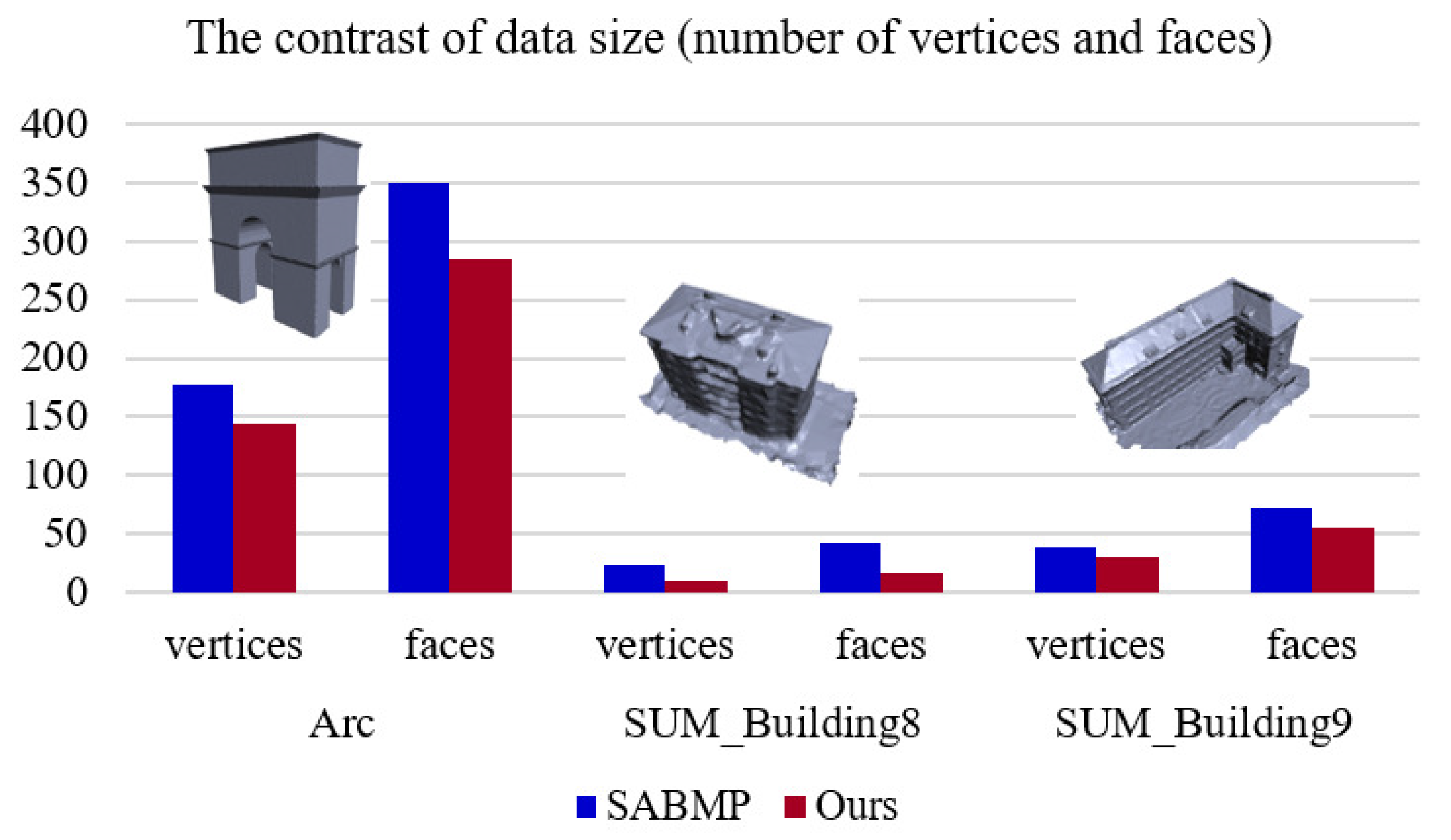
4.2.1. Quantitative Comparison of the Number of Planes and Simplification Capability
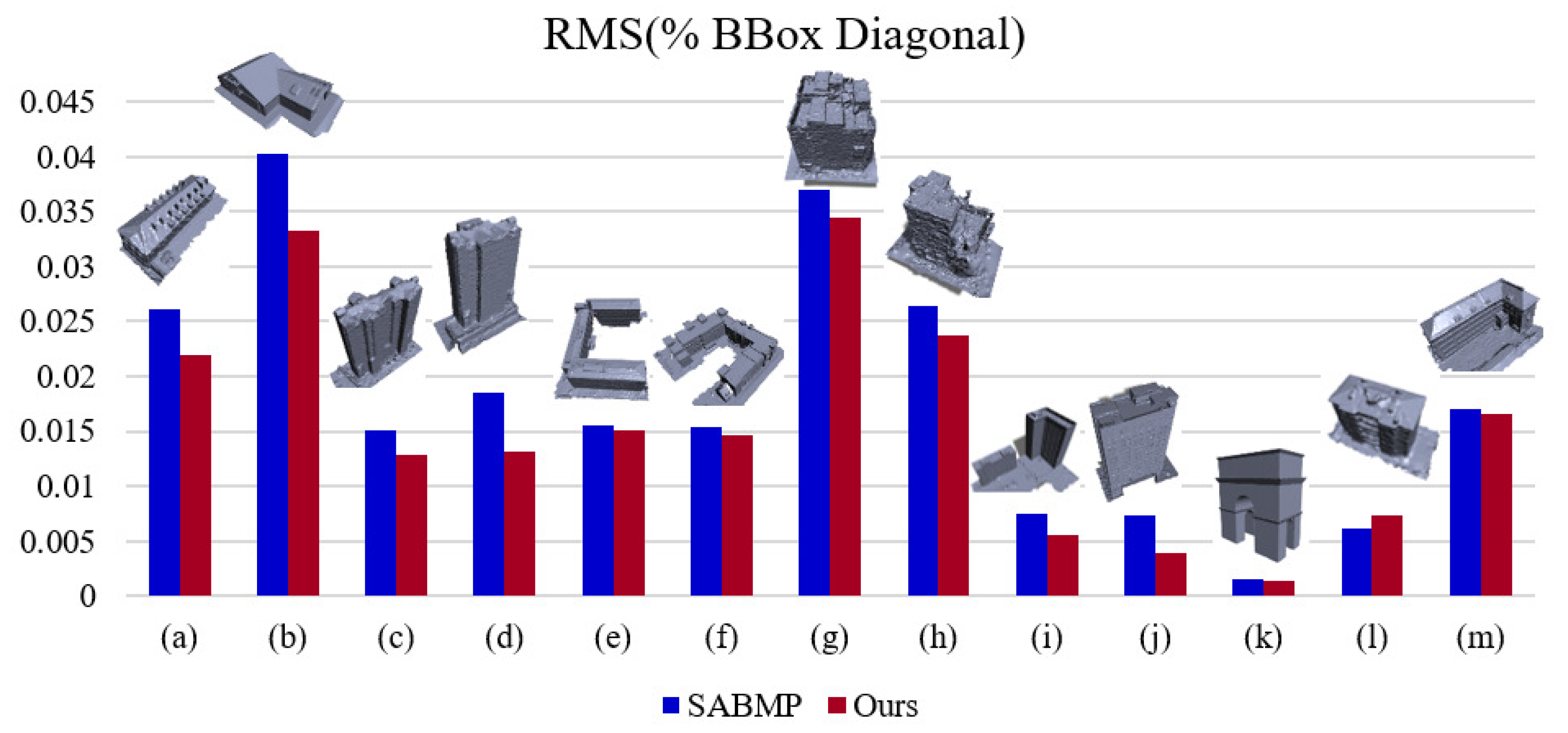
4.2.2. Quantitative Comparison of Geometric Accuracy
4.2.3. Quantitative Comparison of Run Times
4.3. Discussion
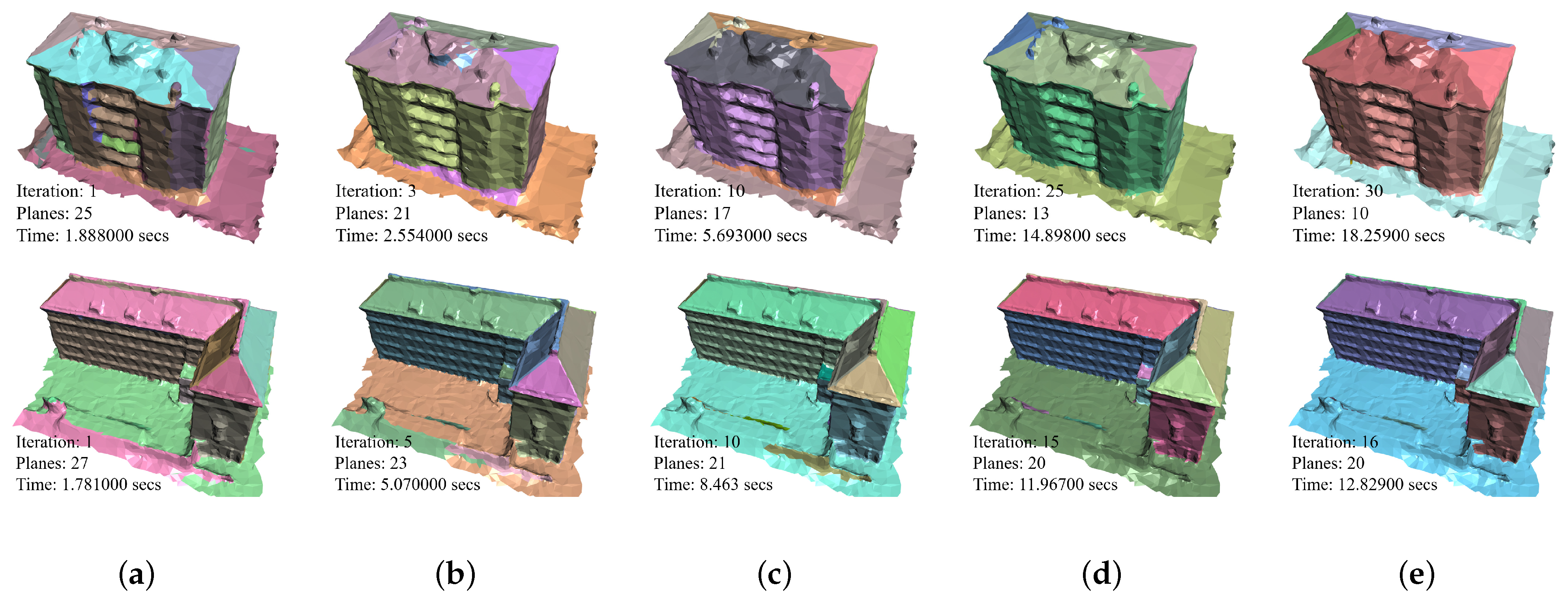
4.3.1. Influence of the Iteration Number on Segmentation
4.3.2. Limitations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. The Formulations of Optimization
References
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. Structure-from-motion’photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. A comparison and evaluation of multi-view stereo reconstruction algorithms. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; Volume 1, pp. 519–528. [Google Scholar]
- Ziegel, E.R.; Fotheringham, S.; Rogerson, P. Spatial Analysis and GIS. Technometrics 1997, 39, 238. [Google Scholar] [CrossRef]
- Verdie, Y.; Lafarge, F.; Alliez, P. LOD Generation for Urban Scenes. ACM Trans. Graph. 2015, 34, 1–14. [Google Scholar] [CrossRef]
- Li, M.; Rottensteiner, F.; Heipke, C. Modelling of buildings from aerial LiDAR point clouds using TINs and label maps. ISPRS J. Photogramm. Remote Sens. 2019, 154, 127–138. [Google Scholar] [CrossRef]
- Han, J.; Zhu, L.; Gao, X.; Hu, Z.; Zhou, L.; Liu, H.; Shen, S. Urban Scene LOD Vectorized Modeling from Photogrammetry Meshes. IEEE Trans. Image Process. 2021, 30, 7458–7471. [Google Scholar] [CrossRef]
- Li, M.; Wonka, P.; Nan, L. Manhattan-World Urban Reconstruction from Point Clouds. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 54–69. [Google Scholar] [CrossRef]
- Fang, H.; Lafarge, F. Connect-and-slice: An hybrid approach for reconstructing 3d objects. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; p. 13. [Google Scholar]
- Yan, L.; Li, Y.; Xie, H. Urban Building Mesh Polygonization Based on 1-Ring Patch and Topology Optimization. Remote Sens. 2021, 13, 4777. [Google Scholar] [CrossRef]
- Nan, L.; Wonka, P. Polyfit: Polygonal surface reconstruction from point clouds. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2353–2361. [Google Scholar]
- Bouzas, V.; Ledoux, H.; Nan, L. Structure-aware building mesh polygonization. ISPRS J. Photogramm. Remote Sens. 2020, 167, 432–442. [Google Scholar] [CrossRef]
- Chen, Z.; Khademi, S.; Ledoux, H.; Nan, L. Reconstructing compact building models from point clouds using deep implicit fields. arXiv 2021, arXiv:2112.13142. [Google Scholar]
- Nauata, N.; Chang, K.-H.; Cheng, C.-Y.; Mori, G.; Furukawa, Y. House-GAN: Relational Generative Adversarial Networks for Graph-Constrained House Layout Generation. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 162–177. [Google Scholar] [CrossRef]
- Qian, Y.; Zhang, H.; Furukawa, Y. Roof-gan: Learning to generate roof geometry and relations for residential houses. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 2796–2805. [Google Scholar]
- Gui, S.; Qin, R. Automated LoD-2 model reconstruction from very-high-resolution satellite-derived digital surface model and orthophoto. ISPRS J. Photogramm. Remote Sens. 2021, 181, 1–19. [Google Scholar] [CrossRef]
- Wang, J.; Hu, X.; Meng, Q.; Zhang, L.; Wang, C.; Liu, X.; Zhao, M. Developing a Method to Extract Building 3D Information from GF-7 Data. Remote Sens. 2021, 13, 4532. [Google Scholar] [CrossRef]
- Garland, M.; Heckbert, P.S. Surface simplification using quadric error metrics. In Proceedings of the 24th Annual Conference on Computer Graphics and Interactive Techniques, Los Angeles, CA, USA, 1 October 1997; pp. 209–216. [Google Scholar]
- Melax, S. A simple, fast, and effective polygon reduction algorithm. Game Dev. 1988, 11, 44–49. [Google Scholar]
- Li, M.; Nan, L. Feature-preserving 3D mesh simplification for urban buildings. ISPRS J. Photogramm. Remote Sens. 2021, 173, 135–150. [Google Scholar] [CrossRef]
- Cohen-Steiner, D.; Alliez, P.; Desbrun, M. Variational shape approximation. ACM Trans. Graph. 2004, 23, 905–914. [Google Scholar] [CrossRef]
- Lévy, B.; Liu, Y. Lp centroidal voronoi tessellation and its applications. ACM Trans. Graph. (TOG) 2010, 29, 1–11. [Google Scholar] [CrossRef]
- Lévy, B.; Bonneel, N. Variational Anisotropic Surface Meshing with Voronoi Parallel Linear Enumeration. In Proceedings of the 21st International Meshing Roundtable, San Jose, CA, USA, 7–10 October 2012; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Bauchet, J.-P.; Lafarge, F. City reconstruction from airborne lidar: A computational geometry approach. In Proceedings of the 3D GeoInfo 2019-14thConference 3D GeoInfo, Singapore, 24–27 September 2019. [Google Scholar]
- LeDoux, H.; Ohori, K.A.; Kumar, K.; Dukai, B.; Labetski, A.; Vitalis, S. CityJSON: A compact and easy-to-use encoding of the CityGML data model. Open Geospat. Data, Softw. Stand. 2019, 4, 1–12. [Google Scholar] [CrossRef]
- Gröger, G.; Kolbe, T.H.; Nagel, C.; Häfele, K.-H. Ogc City Geography Markup Language (Citygml) Encoding Standard; Open Geospatial Consortium: Rockville, MD, USA, 2012. [Google Scholar]
- Zhu, L.; Shen, S.; Gao, X.; Hu, Z. Large scale urban scene modeling from mvs meshes. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 614–629. [Google Scholar]
- Zhu, L.; Shen, S.; Hu, L.; Hu, Z. Variational building modeling from urban mvs meshes. In Proceedings of the 2017 International Conference on 3D Vision (3DV), Qingdao, China, 10–12 October 2017; pp. 318–326. [Google Scholar]
- Li, M.L.; Nan, L.L.; Smith, N.; Wonka, P. Reconstructing building mass models from UAV images. Comput. Graph. 2016, 54, 84–93. [Google Scholar] [CrossRef]
- Zhang, F.; Nauata, N.; Furukawa, Y. Conv-MPN: Convolutional Message Passing Neural Network for Structured Outdoor Architecture Reconstruction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 2795–2804. [Google Scholar] [CrossRef]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for point-cloud shape detection. In Computer Graphics Forum; Blackwell Publishing Ltd.: Oxford, UK, 2007; pp. 214–226. [Google Scholar]
- Lafarge, F.; Mallet, C. Creating Large-Scale City Models from 3D-Point Clouds: A Robust Approach with Hybrid Representation. Int. J. Comput. Vis. 2012, 99, 69–85. [Google Scholar] [CrossRef]
- Oesau, S.; Lafarge, F.; Alliez, P. Planar Shape Detection and Regularization in Tandem. Comput. Graph. Forum 2015, 35, 203–215. [Google Scholar] [CrossRef] [Green Version]
- Fang, H.; Lafarge, F.; Desbrun, M. Planar shape detection at structural scales. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2965–2973. [Google Scholar]
- Guinard, S.; Landrieu, L.; Caraffa, L.; Vallet, B. Piecewise-Planar Approximation of Large 3d Data as Graph-Structured Optimization. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, V-2/W5, 365–372. [Google Scholar] [CrossRef]
- Zhu, X.; Liu, X.; Zhang, Y.; Wan, Y.; Duan, Y. Robust 3-D Plane Segmentation from Airborne Point Clouds Based on Quasi-A-Contrario Theory. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 7133–7147. [Google Scholar] [CrossRef]
- Mehra, R.; Zhou, Q.; Long, J.; Sheffer, A.; Gooch, A.; Mitra, N.J. Abstraction of man-made shapes. In Proceedings of the ACM SIGGRAPH Asia 2009 Papers, Yokohama, Japan, 16–19 December 2009; pp. 1–10. [Google Scholar]
- Boykov, Y.; Kolmogorov, V. An experimental comparison of min-cut/max- flow algorithms for energy minimization in vision. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 1124–1137. [Google Scholar] [CrossRef] [PubMed]
- Li, S.Z. Markov random field models in computer vision. In Proceedings of the European Conference on Computer Vision, Stockholm, Sweden, 2–6 May 1994; Springer: Berlin/Heidelberg, Germany, 1994; pp. 361–370. [Google Scholar]
- Gao, W.; Nan, L.; Boom, B.; Ledoux, H. Sum: A benchmark dataset of semantic urban meshes. ISPRS J. Photogramm. Remote Sens. 2021, 179, 108–120. [Google Scholar] [CrossRef]
- Guthe, M.; Borodin, P.; Klein, R. Fast and accurate hausdorff distance calculation between meshes. J. WSCG 2005, 13, 41–48. [Google Scholar]
- Johnson, D.S.; Papadimitriou, C.H.; Steiglitz, K. Combinatorial Optimization: Algorithms and Complexity. Am. Math. Mon. 1984, 91, 209. [Google Scholar] [CrossRef]
- Williams, H.P. Integer programming. In Logic and Integer Programming; Springer: Berlin/Heidelberg, Germany, 2009; pp. 25–70. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Input Vertices | Input Faces | Planes | SABMP [11] | Time (s) | Planes | Ours | Time (s) | ||
|---|---|---|---|---|---|---|---|---|---|---|
| Output Vertices | Output Faces | Output Points | Output Faces | |||||||
| SUM _ Building1 | 15,383 | 30,143 | 64 | 43 | 82 | 5.7 | 55 | 121 | 238 | 27.35 |
| College | 33,845 | 65,614 | 84 | 156 | 308 | 82.2 | 93 | 647 | 1290 | 267 |
| Nanyang _ 3 | 44,380 | 88,271 | 93 | 89 | 170 | 12 | 57 | 221 | 438 | 14.32 |
| House _ b | 18,716 | 37,245 | 65 | 52 | 100 | 21.3 | 42 | 93 | 162 | 65.3 |
| Arc | 13,631 | 27,258 | 75 | 177 | 350 | 3.4 | 71 | 144 | 284 | 12 |
| SUM _ Building8 | 3321 | 6503 | 37 | 23 | 42 | 1.2 | 14 | 10 | 16 | 15.6 |
| SUM _ Building9 | 6295 | 12,414 | 47 | 38 | 72 | 0.71 | 22 | 30 | 56 | 16.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Guo, B.; Wang, S.; Liu, S.; Peng, Z.; Li, D. Urban Building Mesh Polygonization Based on Plane-Guided Segmentation, Topology Correction and Corner Point Clump Optimization. Remote Sens. 2022, 14, 4300. https://doi.org/10.3390/rs14174300
Liu Y, Guo B, Wang S, Liu S, Peng Z, Li D. Urban Building Mesh Polygonization Based on Plane-Guided Segmentation, Topology Correction and Corner Point Clump Optimization. Remote Sensing. 2022; 14(17):4300. https://doi.org/10.3390/rs14174300
Chicago/Turabian StyleLiu, Yawen, Bingxuan Guo, Shuo Wang, Sikang Liu, Ziming Peng, and Demin Li. 2022. "Urban Building Mesh Polygonization Based on Plane-Guided Segmentation, Topology Correction and Corner Point Clump Optimization" Remote Sensing 14, no. 17: 4300. https://doi.org/10.3390/rs14174300
APA StyleLiu, Y., Guo, B., Wang, S., Liu, S., Peng, Z., & Li, D. (2022). Urban Building Mesh Polygonization Based on Plane-Guided Segmentation, Topology Correction and Corner Point Clump Optimization. Remote Sensing, 14(17), 4300. https://doi.org/10.3390/rs14174300