
Optimal Configuration of Array Elements for Hybrid Distributed PA-MIMO Radar System Based on Target Detection


Abstract
:
1. Introduction
- (1)
- We formulated the closed form element configuration problem as an optimization model for the hybrid distributed PA-MIMO radar based on NP criterion. In this study, the spatial configuration of the array elements is implemented through uniform division of the target scattering matrix, and the likelihood ratio test detector is derived from this for target detection of the hybrid distributed PA-MIMO radar.
- (2)
- We proposed an efficient quantum particle swarm optimization-based stochastic rounding (SR-QPSO) algorithm to cope with the integer programming closed-form approximation optimization problem. The formulated configuration scheme is a two integer-variable optimization problem, which contains a transmitting end blocking variable and a receiving end blocking variable. To obtain the optimal solution, we extended the basic QPSO algorithm to a stochastic rounding method combined with the cyclic minimization algorithm (CMA).
- (3)
- We presented three numerical simulation results to demonstrate the theoretical findings and validate the effectiveness of the proposed optimization scheme. Moreover, the three simulations also illustrate the elements configuration optimization achieves a better detection performance improvement for the hybrid distributed PA-MIMO radar in three totally different aspects: Detection Probability, Effective Radar Range and System Equipment Volume.
2. System Model
2.1. Proposed Hybrid Distributed PA-MIMO Radar System Signal Model
2.2. Hybrid Distributed PA-MIMO Radar System Configuration
3. Hybrid Distributed PA-MIMO Radar System with Optimal Configuration
3.1. Signal Processing Flow of Hybrid Distributed Phased Array MIMO Radar
3.2. LRT Detector of the Hybrid Distributed PA-MIMO Radar System
- (1)
- LRT Statistical Analysis under Hypothesis
4. Optimization Model Establishment and Solution
4.1. Overview of the Optimization Problem for Hybrid Distributed PA-MIMO Radar Systems
4.2. Detection Performance Analysis of Typical Hybrid Distributed PA-MIMO Radar System
- (1)
- Distributed MIMO radar with full diversity processing:
- (2)
- Phased array radar with full coherent processing:
- (3)
- Multiple-input single-output (MISO) radar with full diversity processing at the transmitter side and full coherent processing on the receiver side:
- (4)
- Single-input multiple-output (SIMO) radar with full diversity processing at the receiver side and coherent processing on the transmitter side.Similarly, the distribution of test statistics of these typical radars is obtained as:
4.3. Optimal Uniform Configuration for Hybrid Distributed PA-MIMO Radar System
- (1)
- Model of optimization problem 1
- (2)
- Model of optimization problem 2
- (3)
- Model of optimization problem 3
4.4. QPSO-Based Stochastic Rounding Optimization Solution Algorithm
| Algorithms 1: SR-QPSO |
 |
5. Simulations and Analysis
5.1. Parameter Settings
5.2. Results and Discussion
- (1)
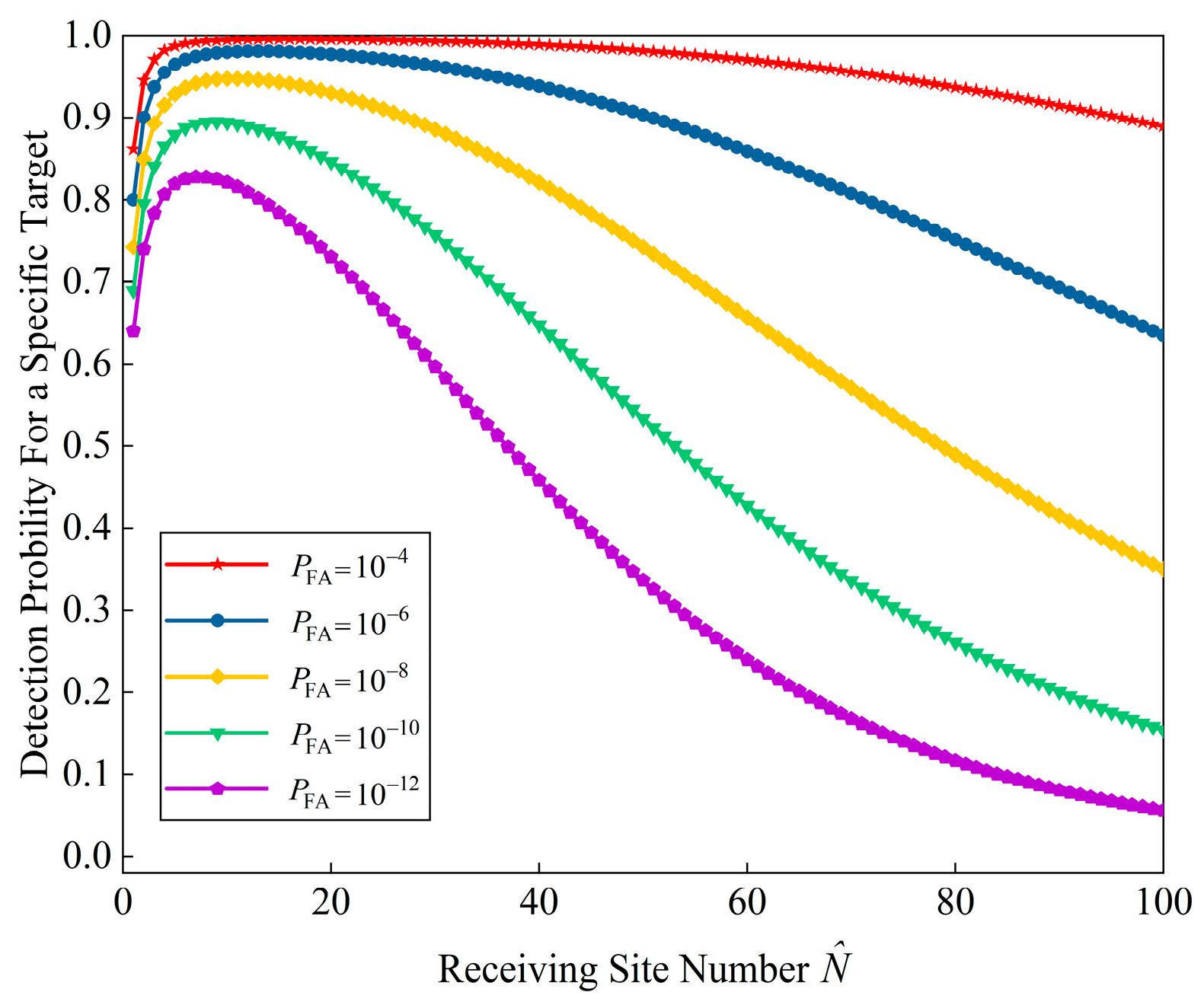
- Case 1: Maximize Detection Probability
- (2)
- Case 2: Maximize Effective Radar Range
- (3)
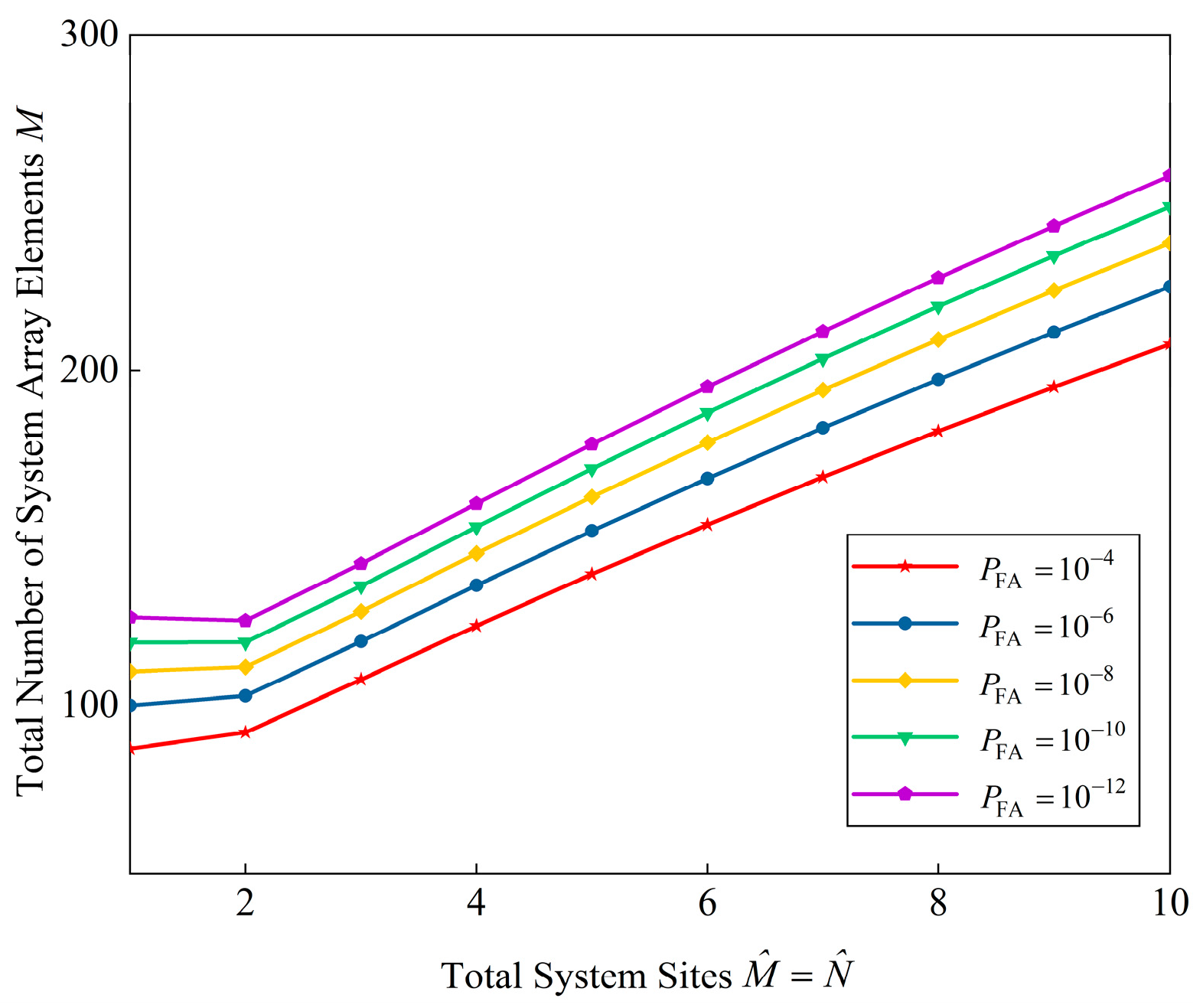
- Case 3: Minimize System Element Volume
6. General Discussion
- (1)
- With the increase in diversity DOFs at the transmitter and receiver, the radar detection performance deteriorates when DOFs exceed the optimal values. Generally, different optimization objectives have different optimal configuration schemes, and the radar detection probability and false alarm probability also affect the value of optimal diversity DOF and .
- (2)
- The essence of the superior detection performance of the hybrid distributed PA-MIMO radar lies in the coherent processing improves the local SNR within each subarray, based on which the spatial diversity gain generated between the independent subarrays will further improve the target detection capability. In particular, for all optimization problems, only a small transmitter-side diversity DOF is required since the gain generated by transmit-side diversity cannot compensate for the lost coherent processing gain.
- (3)
- The results show that the optimal scheme of configuration is M = 1, N = 13 in the case of optimal detection probability, and the detection probability reaches 0.98; while the optimal configuration strategy is M = 1, N = 5 for maximizing the effective radar range to 1166.9 km. When the array transceiver is shared, the minimum number of elements is needed when only one phased array antenna is used under the condition of PD ≤ 0.8. Further, it is necessary to divide the array elements into two separated phased array antennas to obtain the spatial diversity gain when PD > 0.8. Hence, optimized array element configuration improves target detection performance to some extent.
- (4)
- In this paper, as a further extension of [20], the optimal allocation of coherent processing gain and spatial diversity gain is conducted. However, the paper is limited to the optimal configuration under uniform division of array elements, which is obviously far from the optimal array element allocation scheme and needs to be studied in depth in the future.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fishler, E.; Haimovich, A.; Blum, R.; Chizhik, D.; Cimini, L.; Valenzuela, R. MIMO radar: An idea whose time has come. In Proceedings of the 2004 IEEE Radar Conference (IEEE Cat. No.04CH37509), Philadelphia, PA, USA, 29–29 April 2004; pp. 71–78. [Google Scholar]
- Shi, C.; Wang, Y.; Salous, S.; Zhou, J.; Yan, J. Joint Transmit Resource Management and Waveform Selection Strategy for Target Tracking in Distributed Phased Array Radar Network. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 2762–2778. [Google Scholar] [CrossRef]
- Shi, C.; Wang, Y.; Wang, F.; Salous, S.; Zhou, J. Joint Optimization Scheme for Subcarrier Selection and Power Allocation in Multicarrier Dual-Function Radar-Communication System. IEEE Syst. J. 2020, 15, 947–958. [Google Scholar] [CrossRef]
- Malanowski, M.; Kulpa, K. Detection of Moving Targets With Continuous-Wave Noise Radar: Theory and Measurements. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3502–3509. [Google Scholar] [CrossRef]
- Van Trees, H.L. Detection, Estimation And Modulation Theory; Wiley: New York, NY, USA, 1968. [Google Scholar]
- Zhu, Z.; Kay, S.; Raghavan, R.S. Information-Theoretic Optimal Radar Waveform Design. IEEE Signal Process. Lett. 2017, 24, 274–278. [Google Scholar] [CrossRef]
- Yan, J.; Liu, H.; Pu, W.; Zhou, S.; Liu, Z.; Bao, Z. Joint Beam Selection and Power Allocation for Multiple Target Tracking in Netted Colocated MIMO Radar System. IEEE Trans. Signal Process. 2016, 64, 6417–6427. [Google Scholar] [CrossRef]
- Xu, L.; Li, J.; Stoica, P. Target detection and parameter estimation for MIMO radar systems. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 927–939. [Google Scholar]
- Zhang, H.; Liu, W.; Shi, J.; Fei, T.; Zong, B. Joint Detection Threshold Optimization and Illumination Time Allocation Strategy for Cognitive Tracking in a Networked Radar System. IEEE Trans. Signal Process. 2022; 1–15, to be published. [Google Scholar]
- Zhang, H.; Liu, W.; Zhang, Z.; Lu, W.; Xie, J. Joint Target Assignment and Power Allocation in Multiple Distributed MIMO Radar Networks. IEEE Syst. J. 2021, 15, 694–704. [Google Scholar] [CrossRef]
- Zhang, H.; Zhou, H.; Zong, B.; Xie, J. A Fast Power Allocation Strategy for Multibeam Tracking Multiple Targets in Clutter. IEEE Syst. J. 2021, 16, 1249–1257. [Google Scholar] [CrossRef]
- Yan, J.; Dai, J.; Pu, W.; Liu, H.; Greco, M.S. Target Capacity Based Resource Optimization for Multiple Target Tracking in Radar Network. IEEE Trans. Signal Process. 2021, 69, 2410–2421. [Google Scholar] [CrossRef]
- Yan, J.; Liu, H.; Jiu, B.; Chen, B.; Liu, Z.; Bao, Z. Simultaneous Multibeam Resource Allocation Scheme for Multiple Target Tracking. IEEE Trans. Signal Process. 2015, 63, 3110–3122. [Google Scholar] [CrossRef]
- Qi, C.; Xie, J.; Zhang, H. Joint Antenna Placement and Power Allocation for Target Detection in a Distributed MIMO Radar Network. Remote Sens. 2022, 14, 2650. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. MIMO Radar with Colocated Antennas. IEEE Signal Process. Mag. 2007, 24, 106–114. [Google Scholar] [CrossRef]
- Haimovich, A.M.; Blum, R.S.; Cimini, L.J. MIMO radar with widely separated antennas. IEEE Signal Process. Mag. 2007, 25, 116–129. [Google Scholar] [CrossRef]
- Fishler, E.; Haimovich, A.; Blum, R.; Cimini, L.; Chizhik, D.; Valenzuela, R. Spatial Diversity in Radars—Models and Detection Performance. IEEE Trans. Signal Process. 2006, 54, 823–838. [Google Scholar] [CrossRef]
- Zhang, G.Y. Principle of Phased Array Radar; National Defense Industry Press: Beijing, China, 2009. [Google Scholar]
- Skolnik, M.I. Radar Handbook; McGraw-Hill Book Co.: New York, NY, USA, 1990. [Google Scholar]
- Xu, J.; Dai, X.-Z.; Xia, X.-G.; Wang, L.-B.; Yu, J.; Peng, Y.-N. Optimizations of Multisite Radar System with MIMO Radars for Target Detection. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2329–2343. [Google Scholar] [CrossRef]
- Brookner, E. Phased-Array and Radar Breakthroughs. In Proceedings of the 2007 IEEE Radar Conference, Waltham, MA, USA, 17–20 April 2007; pp. 37–42. [Google Scholar]
- Brookner, E. Phased-array and radar astounding breakthroughs—An update. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar]
- Butt, A.; Naqvi, I.H.; Riaz, U. Hybrid Phased-MIMO Radar: A Novel Approach With Optimal Performance Under Electronic Countermeasures. IEEE Commun. Lett. 2018, 22, 1184–1187. [Google Scholar] [CrossRef]
- Shi, C.; Ding, L.; Wang, F.; Salous, S.; Zhou, J. Joint Target Assignment and Resource Optimization Framework for Multitarget Tracking in Phased Array Radar Network. IEEE Syst. J. 2021, 15, 4379–4390. [Google Scholar] [CrossRef]
- Hassanien, A.; Vorobyov, S.A. Phased-MIMO Radar: A Tradeoff Between Phased-Array and MIMO Radars. IEEE Trans. Signal Process. 2010, 58, 3137–3151. [Google Scholar] [CrossRef] [Green Version]
- Bergin, J.; McNeil, S.; Fomundam, L.; Zulch, P.A. MIMO Phased-Array for SMTI Radar. In Proceedings of the 2008 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008. [Google Scholar]
- Ismail, N.E.-D.; Mahmoud, S.H.; Hafez, A.S.; Reda, T. A new phased MIMO radar partitioning schemes. In Proceedings of the IEEE Aerospace Conference, Cincinnati, OH, USA, 19–23 May 2014; pp. 1–7. [Google Scholar]
- ADeligiannis, A.; Amin, M.; Lambotharan, S.; Fabrizio, G. Optimum Sparse Subarray Design for Multitask Receivers. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 939–950. [Google Scholar] [CrossRef] [Green Version]
- Yi, J.; Wan, X.; Leung, H.; Lu, M. Joint Placement of Transmitters and Receivers for Distributed MIMO Radars. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 122–134. [Google Scholar] [CrossRef]
- Radmard, M.; Chitgarha, M.M.; Majd, M.N.; Nayebi, M.M. Antenna placement and power allocation optimization in MIMO detection. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1468–1478. [Google Scholar] [CrossRef]
- Brookner, E. Never ending saga of phased array breakthroughs. In Proceedings of the 2010 IEEE International Symposium on Phased Array Systems and Technology, Waltham, MA, USA, 12–15 October 2010; pp. 61–73. [Google Scholar]
- Fei, T.; Tan, X.; Zhang, K.; Wang, P.; Wang, H. Optimizations of Elements Configurations for Distributed MIMO Digital Array Radar. Mod. Radar 2017, 39, 22–27. [Google Scholar]
- Fei, T.; Tan, X.; Lin, Q.; Qu, Z. Research on detection performance for distributed MIMO digital array radar. J. Huazhong Univ. Sci. Technol. 2017, 45, 80–85. [Google Scholar]
- Zhou, S.; Liu, H.; Zhao, Y.; Hu, L. Target spatial and frequency scattering diversity property for diversity MIMO radar. Signal Process. 2011, 91, 269–276. [Google Scholar] [CrossRef]
- Zhang, H.; Shi, J.; Zhang, Q.; Zong, B.; Xie, J. Antenna Selection for Target Tracking in Collocated MIMO Radar. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 423–436. [Google Scholar] [CrossRef]
- Jaynes, E.T.; Bretthorst, G.L. Probability theory: The logic of science. Math. Intell. 2005, 27, 83. [Google Scholar]
- Box, G.E.P. Some Theorems on Quadratic Forms Applied in the Study of Analysis of Variance Problems, I. Effect of Inequality of Variance in the One-Way Classification. Ann. Math. Stat. 1954, 25, 290–302. [Google Scholar] [CrossRef]
- Stolkin, R.; Florescu, I. Probability of Detection and Optimal Sensor Placement for Threshold Based Detection Systems. IEEE Sens. J. 2009, 9, 57–60. [Google Scholar] [CrossRef]
- Zhang, T.; Xia, Z.; Yang, Y.; Zhao, Z.; Liu, X.; Zhang, Y.; Liu, D.; Yin, X. Waveform Optimization of High SNR and High Resolution Cognitive Radar for Sparse Target Detection. In Proceedings of the 2021 IEEE 4th International Conference on Electronics Technology (ICET), Chengdu, China, 7–10 May 2021; pp. 200–203. [Google Scholar]
- Xu, J.; Dai, X.-Z.; Xia, X.-G.; Wang, L.-B.; Yu, J.; Peng, Y.-N. Optimal transmitting diversity degree-of-freedom for statistical MIMO radar. In Proceedings of the 2010 IEEE Radar Conference, Arlington, VA, USA, 10–14 May 2010; pp. 437–440. [Google Scholar]
- Jun, S.; Wenbo, X.; Bin, F. A global search strategy of quantum-behaved particle swarm optimization. IEEE Conf. Cybern. Intell. Syst. 2004, 1, 111–116. [Google Scholar]
- Jun, S.; Wenbo, X.; Bin, F. Adaptive parameter control for quantum-behaved particle swarm optimization on individual level. IEEE Int. Conf. Syst. Man Cybern. 2005, 4, 3049–3054. [Google Scholar]
- Yao, Y.; Liu, H.; Miao, P.; Wu, L. MIMO Radar Design for Extended Target Detection in a Spectrally Crowded Environment. IEEE Trans. Intell. Transp. Syst. 2021, 1–10. [Google Scholar] [CrossRef]
- Zhang, W.; Shi, C.; Salous, S.; Zhou, J.; Yan, J. Convex Optimization-Based Power Allocation Strategies for Target Localization in Distributed Hybrid Non-Coherent Active-Passive Radar Networks. IEEE Trans. Signal Process. 2022, 70, 2476–2488. [Google Scholar] [CrossRef]
- Deng, M.; Cheng, Z.; He, Z. Limited-Memory Receive Filter Design for Massive MIMO Radar in Signal-Dependent Interference. IEEE Signal Processing Lett. 2022, 29, 1536–1540. [Google Scholar] [CrossRef]
- Ahmed, A.M.; Ahmad, A.A.; Fortunati, S.; Sezgin, A.; Greco, M.S.; Gini, F. A Reinforcement Learning Based Approach for Multitarget Detection in Massive MIMO Radar. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2622–2636. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Hoang, D.T.; Luong, N.C.; Niyato, D.; Kim, D.I. A Hierarchical Game Model for OFDM Integrated Radar and Communication Systems. IEEE Trans. Veh. Technol. 2021, 70, 5077–5082. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Names | Symbols | Settings |
|---|---|---|
| Detection Probability | [0,1] | |
| Effective Radar Range | ||
| Number of array elements | M | [0,100] |
| Simulation | Optimal Index | Configuration Scheme | Convergence Time |
|---|---|---|---|
| Case 1 | 87.275 s | ||
| Case 2 | 86.778 s | ||
| Case 3 | / | ||
| MIMO radar | / | ||
| PA radar | / |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, C.; Xie, J.; Zhang, H.; Ding, Z.; Yang, X. Optimal Configuration of Array Elements for Hybrid Distributed PA-MIMO Radar System Based on Target Detection. Remote Sens. 2022, 14, 4129. https://doi.org/10.3390/rs14174129
Qi C, Xie J, Zhang H, Ding Z, Yang X. Optimal Configuration of Array Elements for Hybrid Distributed PA-MIMO Radar System Based on Target Detection. Remote Sensing. 2022; 14(17):4129. https://doi.org/10.3390/rs14174129
Chicago/Turabian StyleQi, Cheng, Junwei Xie, Haowei Zhang, Zihang Ding, and Xiao Yang. 2022. "Optimal Configuration of Array Elements for Hybrid Distributed PA-MIMO Radar System Based on Target Detection" Remote Sensing 14, no. 17: 4129. https://doi.org/10.3390/rs14174129
APA StyleQi, C., Xie, J., Zhang, H., Ding, Z., & Yang, X. (2022). Optimal Configuration of Array Elements for Hybrid Distributed PA-MIMO Radar System Based on Target Detection. Remote Sensing, 14(17), 4129. https://doi.org/10.3390/rs14174129