Comparison of the Lunar Models Using the Hyper-Spectral Imager Observations in Lijiang, China

 ,
,  ,
,
Abstract
1. Introduction
2. Instrumentation and Dataset
2.1. Instrumentation
2.2. Lunar Observation
2.3. Instrument Calibration and Characterization
2.3.1. Laboratory Spectral Calibration
2.3.2. Wavelength Drift Correction
2.3.3. Radiometric Calibration
- Since the apparent angular diameter of the Moon with respect to the observation site is approximately 0.5° and the radiance of the background surrounding the Moon is virtually zero, the low stray light level is obtained for lunar measurements. To meet the requirements of small field of view (FOV) during the absolute calibration, the field angle with respect to the spectrometer should be close to 0.5°as far as possible.
- For radiometric calibration, it is necessary that the light from the lamp–plate system is utilized to fill the field of view of the spectrometer.
- To ensure the property of Lambertian source with respect to the instrument, the size of the light source is large enough to avoid the pointing error of the spectrometer.
2.4. Atmospheric Correction
2.4.1. Aerosol Optical Depth
2.4.2. Atmospheric Profiles
2.4.3. Atmospheric Transmittance
3. Comparison with Lunar Models
3.1. Data Reduction
3.1.1. DN Signal Preprocessing
3.1.2. Radiometric Calibration and Atmosphere Correction
3.1.3. Over-Sampling Correction
3.1.4. Radiance to Irradiance
3.2. Uncertainty Assessments
3.2.1. Scan Mode
3.2.2. Absolute Scale
3.2.3. Spectrum Shift Correction
3.2.4. Atmospheric Correction
3.2.5. Irradiance
3.3. Model Comparison
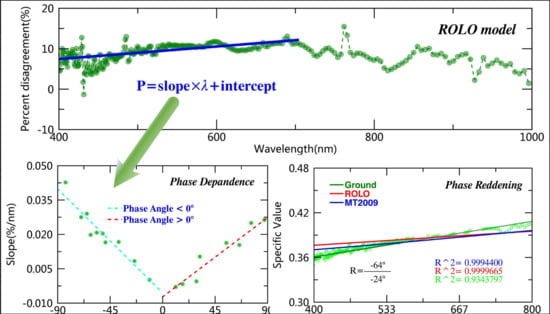
3.3.1. Difference from ROLO Model
3.3.2. Band to Band Stability
3.3.3. Phase Angle Dependence
3.3.4. Comparison between Lunar Models
3.3.5. Phase Reddening
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kieffer, H.H. Photometric stability of the lunar surface. Icarus 1997, 130, 323–327. [Google Scholar] [CrossRef]
- Ohring, G.; Tansock, J.; Emery, W.; Butler, J.; Flynn, L.; Weng, F.; Germain, K.S.; Wielicki, B.; Cao, C.; Goldberg, M.; et al. Achieving satellite instrument calibration for monitoring global climate change. Eos Trans. Am. Geophys. Union 2007, 88, 136. [Google Scholar] [CrossRef]
- Stone, T.C.; Rossow, W.B.; Ferrier, J.; Hinkelman, L.M. Evaluation of isccp multisatellite radiance calibration for geostationary imager visible channels using the moon. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1255–1266. [Google Scholar] [CrossRef]
- Chander, G.; Hewison, T.J.; Fox, N.; Wu, X. Overview of intercalibration of satellite instruments. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1056–1080. [Google Scholar] [CrossRef]
- Xiong, X.; Angal, A.; Butler, J.; Cao, C.; Doelling, D.; Wu, A.; Wu, X. Global space-based inter-calibration system reflective solar calibration reference: From aqua modis to S-NPP VIIRS. In Proceedings of the SPIE Asia-Pacific Remote Sensing, New Delhi, India, 4–7 April 2016; p. 98811D. [Google Scholar]
- Angal, A.; Mccorkel, J.; Thome, K. Results from source-based and detector-based calibrations of a clarreo calibration demonstration system. In Proceedings of the SPIE Optical Engineering + Applications, San Diego, CA, USA, 28 August–1 September 2016; p. 997206. [Google Scholar]
- Lachérade, S. A summary of the joint GSICS—CEOS/IVOS lunar calibration workshop: Moving towards intercalibration using the moon as a transfer target. In Proceedings of the SPIE Remote Sensing, Toulouse, France, 21–24 September 2015; p. 96390Z. [Google Scholar]
- Miller, S.D.; Turner, R.E. A lunar spectral flux database for quantitative viirs day/night band environmental applications. In Proceedings of the 4th Symposium on Future National Operational Environmental Satellites, New Orleans, LA, USA, 20–24 January 2008. [Google Scholar]
- Barreto, Á.; Román, R.; Cuevas, E.; Berjón, A.J.; Almansa, A.F.; Toledano, C.; González, R.; Hernández, Y.; Blarel, L.; Goloub, P. Assessment of nocturnal aerosol optical depth from lunar photometry at izaña high mountain observatory. Atmos. Meas. Tech. 2017, 10, 3007–3019. [Google Scholar] [CrossRef]
- Kieffer, H.H.; Stone, T.C. The spectral irradiance of the moon. Astron. J. 2005, 129, 2887. [Google Scholar] [CrossRef]
- Aznay, O.; Fougnie, B.; Lebègue, L. POLO: A unique dataset to derive the phase angle dependence of the moon irradiance. In Proceedings of the SPIE Remote Sensing, Amsterdam, The Netherlands, 22–25 September 2014; p. 924112. [Google Scholar]
- Lacherade, S.; Viticchié, B.; Stone, T.; Lebègue, L.; Wagner, S.; Hewison, T. On the phase-angle dependence of the moon calibration results. GSICS Quat Lunar Calibration 2013, 7, 6–7. [Google Scholar]
- Meygret, A.; Grosscolzy, L. Improving ROLO lunar albedo model using PLEIADES-HR satellites extra-terrestrial observations. In Proceedings of the SPIE Optical Engineering + Applications, San Diego, CA, USA, 6–10 August 2017. [Google Scholar]
- Ohring, G.; Wielicki, B.; Spencer, R.; Emery, B.; Datla, R. Satellite instrument calibration for measuring global climate change: Report of a workshop. Bull. Am. Meteorol. Soc. 2005, 86, 1303–1313. [Google Scholar] [CrossRef]
- Moreau, L.; Bourque, H.; Taylor, J.; Veilleux, J.; Grandmont, F.; Girard, F.; Larouche, M. Instrument demonstration effort for the clarreo mission. In Proceedings of the International Conference on Space Optics, Rhodes Island, Greece, 4–8 October 2010; p. 19. [Google Scholar]
- Cutter, M.; Fox, N.; Green, P.; Brindley, H.; Russell, J.; Smith, D.; Lobb, D.; Barnes, A. Traceable radiometry underpinning terrestrial and heliostudies (truths): A bencmark mission for climate. In Proceedings of the International Conference on Space Optics, Tenerife, Canary Islands, Spain, 6–10 October 2014; p. 160. [Google Scholar]
- Wang, Y.; Huang, Y.; Wang, S.; Li, Z.; Zhang, Z.; Hu, X.; Zhang, P. Ground-based observation system development for the moon hyper-spectral imaging. Publ. Astron. Soc. Pacific 2017, 129, 055002. [Google Scholar] [CrossRef]
- Xu, Q.; Zheng, X.; Zhang, W.; Li, J. Radiometric characteristics test of integrating sphere source using wavelength-tunable laser. Acta Optica Sin. 2009, 29, 1310–1314. [Google Scholar]
- Young, A.T. Rayleigh scattering. Phys. Today 1982, 35, 42–48. [Google Scholar] [CrossRef]
- Lockwood, G.W.; Thompson, D.T. Atmospheric extinction—The ordinary and volcanically induced variations, 1972–1985. Astron. J. 1986, 92, 976–985. [Google Scholar] [CrossRef]
- Langley, S.P. The bolometer and radiant energy. In Proceedings of the American Academy of Arts and Sciences; American Academy of Arts & Sciences: Cambridge, MA, USA, 1880; pp. 342–358. [Google Scholar]
- Barreto, A.; Cuevas, E.; Damiri, B.; Guirado, C.; Berkoff, T.; Berjón, A.J.; Hernández, Y.; Almansa, F.; Gil, M. A new method for nocturnal aerosol measurements with a lunar photometer prototype. Atmos. Meas. Tech. 2013, 6, 585–598. [Google Scholar] [CrossRef]
- Barnes, W.L.; Eplee, J.R.E.; Butler, J.J.; Barnes, R.A.; Patt, F.S.; Meister, G.; McClain, C.R. Seawifs lunar calibration methodology after six years on orbit. In Proceedings of the Optical Science and Technology, SPIE 49th Annual Meeting, Denver, CO, USA, 2–6 August 2004; Volume 5542, p. 1. [Google Scholar]
- Lee, S.; Meister, G.; Patt, F.S.; Eplee, R.E. Estimating residual uncertainties for lunar irradiance measurements due to imaging acquisition parameters. J. Appl. Remote Sens. 2019, 13, 014508. [Google Scholar] [CrossRef]
- Dai, C.; Wei, H.; Chen, X. Validation of the precision of atmospheric molecular absorption and thermal radiance calculated by combined atmospheric radiative transfer (c10art) code. Infrared Laser Eng. 2013, 42, 174–180. [Google Scholar]
- Anderson, J.M.; Becker, K.J.; Kieffer, H.H.; Dodd, D.N. Real-time control of the robotic lunar observatory telescope. Publ. Astron. Soc. Pacific 1999, 111, 737. [Google Scholar] [CrossRef]
- Eplee, R.E.; Meister, G.; Patt, F.S.; Franz, B.A. A synthesis of viirs solar and lunar calibrations. Proceedings of SPIE—The International Society for Optical Engineering, San Diego, CA, USA, 25–29 August 2013; Volume 8866. [Google Scholar]
- Miller, S.D.; Turner, R.E. A dynamic lunar spectral irradiance data set for NPOESS/VIIRS day/night band nighttime environmental applications. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2316–2329. [Google Scholar] [CrossRef]
- Lane, A.P.; Irvine, W.M. Monochromatic phase curves and albedos for the lunar disk. Astron. J. 1973, 5, 293. [Google Scholar] [CrossRef]
- Stone, T.C.; Kieffer, H.H. Use of the moon to support on-orbit sensor calibration for climate change measurements. In Proceedings of the SPIE Optics + Photonics, San Diego, CA, USA, 13–17 August 2006; Volume 62969, p. 62960Y. [Google Scholar]
- Velikodsky, Y.I.; Opanasenko, N.V.; Akimov, L.A.; Korokhin, V.V.; Shkuratov, Y.G.; Kaydash, V.G.; Videen, G.; Ehgamberdiev, S.A.; Berdalieva, N.E. New earth-based absolute photometry of the moon. Icarus 2011, 214, 30–45. [Google Scholar] [CrossRef]
- Cao, C.; Vermote, E.; Xiong, X. Using avhrr lunar observations for ndvi long-term climate change detection. J. Geophys. Res. 2009, 114. [Google Scholar] [CrossRef]
- Shao, X.; Choi, T.; Cao, C.; Blonski, S.; Wang, W.; Ban, Y. Trending of suomi-NPP VIIRS radiometric performance with lunar band ratio. In Proceedings of the SPIE Asia Pacific Remote Sensing, Beijing, China, 13–16 October 2014; Volume 92610, p. 92640K. [Google Scholar]
- Hapke, B. Theory of Reflectance and Emittance Spectroscopy; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Sanchez, J.A.; Reddy, V.; Nathues, A.; Cloutis, E.A.; Mann, P.; Hiesinger, H. Phase reddening on near-earth asteroids: Implications for mineralogical analysis, space weathering and taxonomic classification. Icarus 2012, 220, 36–50. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wavelength (nm) | Lunar Phase (degree) | Coefficients of Variation (CV) | ||||
|---|---|---|---|---|---|---|
| −51.3 | −37.8 | −24.1 | −11.2 | 17.1 | ||
| 440 | 0.9920 | 1.0043 | 1.0076 | 0.9975 | 0.9987 | 0.61% |
| 500 | 1.0025 | 1.0073 | 1.0015 | 0.9996 | 0.9892 | 0.67% |
| 677 | 1.0020 | 1.0019 | 1.0051 | 0.9995 | 0.9915 | 0.51% |
| 870 | 0.9999 | 0.9997 | 1.0064 | 0.9998 | 0.9942 | 0.43% |
| Line Position (In Figure 8) | Measurement: Gauss Fit (Pixel) | Drift Distance Δ(Pixel) | |||
|---|---|---|---|---|---|
| T0 | T1 | T2 | T1-T0 | T2-T0 | |
| A | 668.80 | 668.05 | 667.65 | −0.76 | −0.40 |
| B | 707.23 | 706.41 | 706.00 | −0.82 | −0.41 |
| C | 794.11 | 793.22 | 792.81 | −0.89 | −0.42 |
| D | 855.96 | 855.08 | 854.61 | −0.89 | −0.46 |
| E | 874.41 | 873.61 | 873.09 | −0.79 | −0.52 |
| F | 885.33 | 884.50 | 883.91 | −0.83 | −0.59 |
| H | 892.08 | 891.16 | 890.65 | −0.92 | −0.51 |
| I | 905.90 | 904.98 | 904.52 | −0.92 | −0.46 |
| Temperature (°) | T0 | T1 | T2 |
|---|---|---|---|
| CCD detector | 6.4 | 6.4 | 6.3 |
| Mechanical framework | 7.4 | −1.2 | −2.3 |
| Prism assembly | 7.6 | −1.3 | −2.4 |
| Focal plane assembly | 6.3 | −1.0 | −2.1 |
| Uncertainty Sources | Percent (%) | |
|---|---|---|
| Oversampling factor | Angular velocity | 0.8 |
| Orientation of the slit | 0.24 | |
| frame frequency | 0.4 | |
| Angular size | 0.3 | |
| Radiometric calibration | Stability of the instrument | 0.5 |
| Linearity of CDD detector | 0.5 | |
| Hemispherical reflectivity and Lambertian characterization | 1.0 | |
| QTH lamp | 1.0 | |
| Stray light | \ | 1.5 |
| Spectrum shift | \ | 0.9 |
| Atmospheric correction (not absorption bands) | Variation in AOD | 1.7 |
| Barometric pressure and temperature | 0.8 | |
| Software calculation | 1.0 | |
| Others | Cumulative errors, wind, file record time misalignments and instrument operation, etc. | 0.28 |
| Root sum square (of all above) | \ | 3.33 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Hu, X.; Chen, L.; Huang, Y.; Li, Z.; Wang, S.; Zhang, P.; Wu, R.; Zhang, L.; Wang, W. Comparison of the Lunar Models Using the Hyper-Spectral Imager Observations in Lijiang, China. Remote Sens. 2020, 12, 1878. https://doi.org/10.3390/rs12111878
Wang Y, Hu X, Chen L, Huang Y, Li Z, Wang S, Zhang P, Wu R, Zhang L, Wang W. Comparison of the Lunar Models Using the Hyper-Spectral Imager Observations in Lijiang, China. Remote Sensing. 2020; 12(11):1878. https://doi.org/10.3390/rs12111878
Chicago/Turabian StyleWang, Yang, Xiuqing Hu, Lin Chen, Yu Huang, Zhanfeng Li, Shurong Wang, Peng Zhang, Ronghua Wu, Lu Zhang, and Wei Wang. 2020. "Comparison of the Lunar Models Using the Hyper-Spectral Imager Observations in Lijiang, China" Remote Sensing 12, no. 11: 1878. https://doi.org/10.3390/rs12111878
APA StyleWang, Y., Hu, X., Chen, L., Huang, Y., Li, Z., Wang, S., Zhang, P., Wu, R., Zhang, L., & Wang, W. (2020). Comparison of the Lunar Models Using the Hyper-Spectral Imager Observations in Lijiang, China. Remote Sensing, 12(11), 1878. https://doi.org/10.3390/rs12111878