Algorithms for Doppler Spectral Density Data Quality Control and Merging for the Ka-Band Solid-State Transmitter Cloud Radar


Abstract
1. Introduction
2. Materials and Methods
2.1. Data and Instrument Description
2.2. Methods
2.2.1. QC for Doppler Spectra
- (i)
- Deleting the data below the corresponding minimum range
- (ii)
- Dealiasing singly wrapped aliased Doppler spectral density algorithm based on the three types of spectra
- (iii)
- Detecting and removing artefacts produced by pulse compression in SZ2
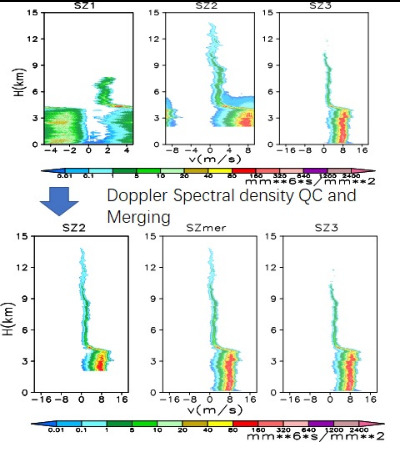
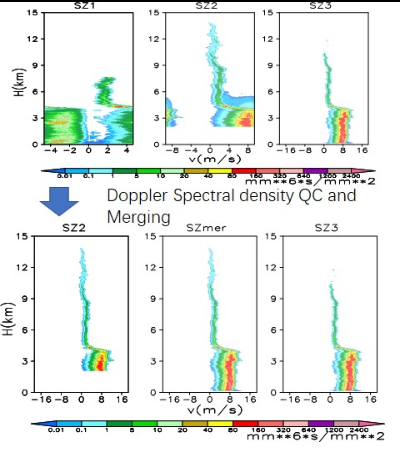
2.2.2. Merging Algorithms for the Reflectivity Spectra Obtained Using the Three Operational Modes
- 1.
- Principles of merging of the reflectivity spectra
- 2.
- Merging the reflectivity spectra
- (1)
- The data below the defined SNR threshold and all of data below the corresponding minimum range are deleted.
- (2)
- The noise level is determined and all continuous spectral bins above the noise level with an SNR threshold and a bin-number threshold are picked up, as cloud signals typically have higher power and larger spectral width than noise. An objective method presented by Hildebrand and Sekhon is commonly used for millimeter-wave cloud radar studies [18]. However, a recent study argues that this approach can overestimate the radar noise power and, thus, it is not appropriate for solid-state cloud radars. In contrast, a segmental approach reported by Petitdidier et al. can achieve better accuracy and stability [19]. Hence, in this study, simple eight-segment technology was utilized to calculate radar noise level.
- (3)
- For merging the reflectivity spectra from SZ1, SZ2, and SZ3, we individually compare and evaluate the 256 reflectivity spectral bins of SZ1, SZ2, and SZ3, and choose the best bins to compose the newly merged reflectivity spectrum SZm. Aliasing and artefact flags for each spectral bin are used as the criteria to determine the spectra to be used. The amplitudes of the spectral bins are considered a key factor to avoid the influence of coherent integration and low SNR on the merged spectra.
- (4)
- The reflectivity, radial velocity, and spectral width are recalculated from the merged reflectivity spectrum SZm.
3. Results
3.1. Doppler Spectral Evaluation and Effects of Observation Parameters in Different Operational Modes
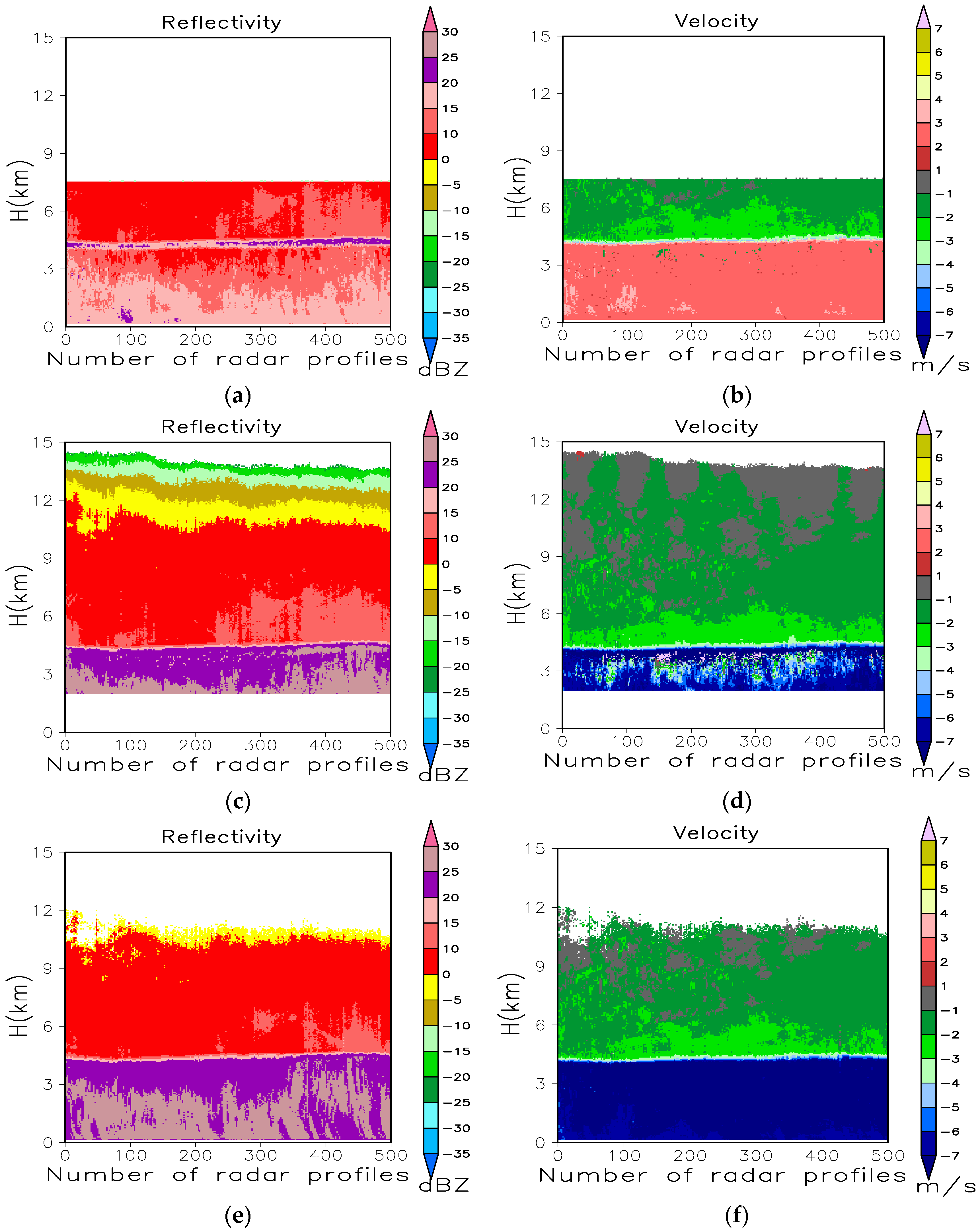
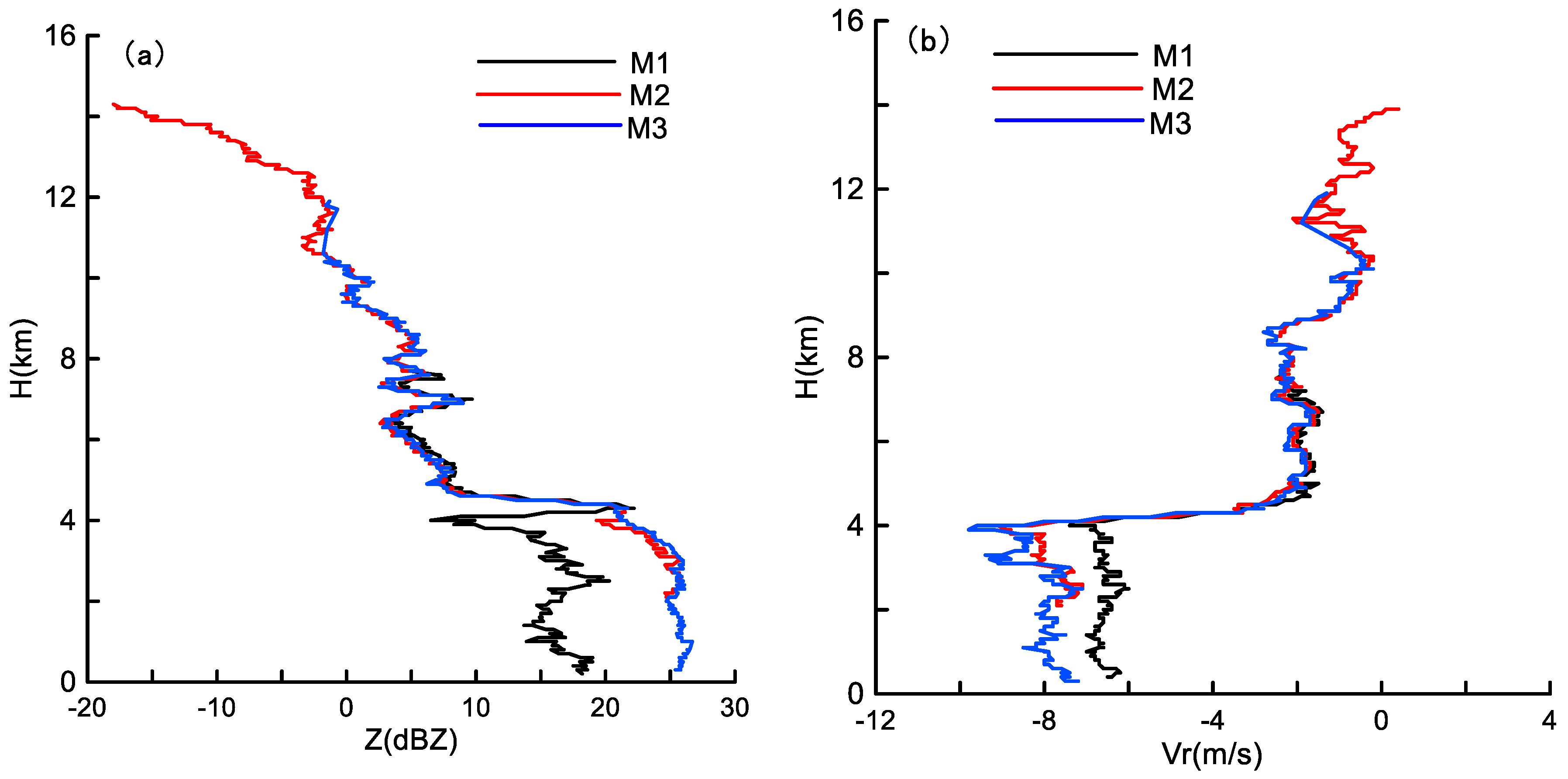
3.1.1. Consistency Analysis of Reflectivity and Velocity for the Three Modes
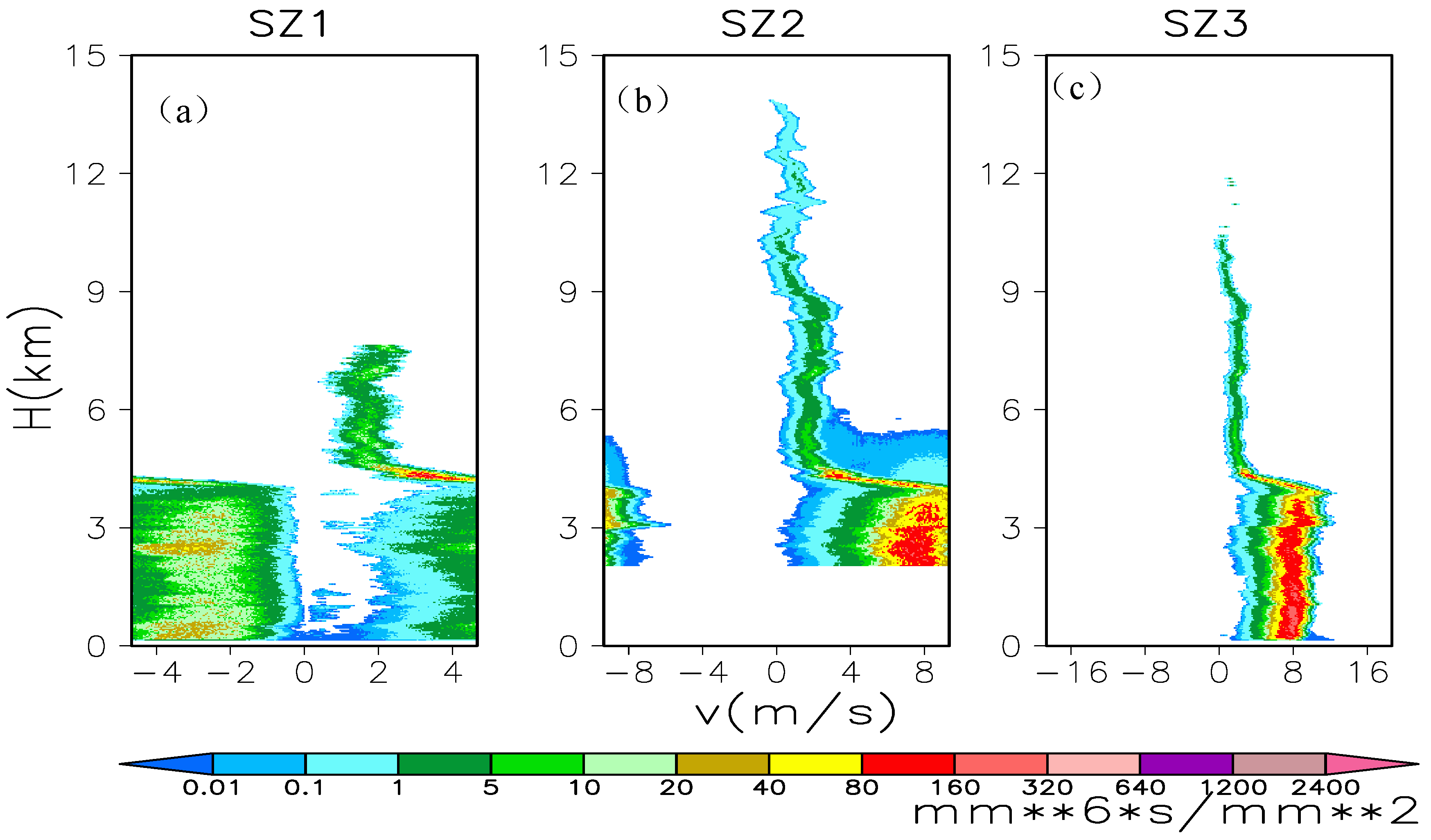
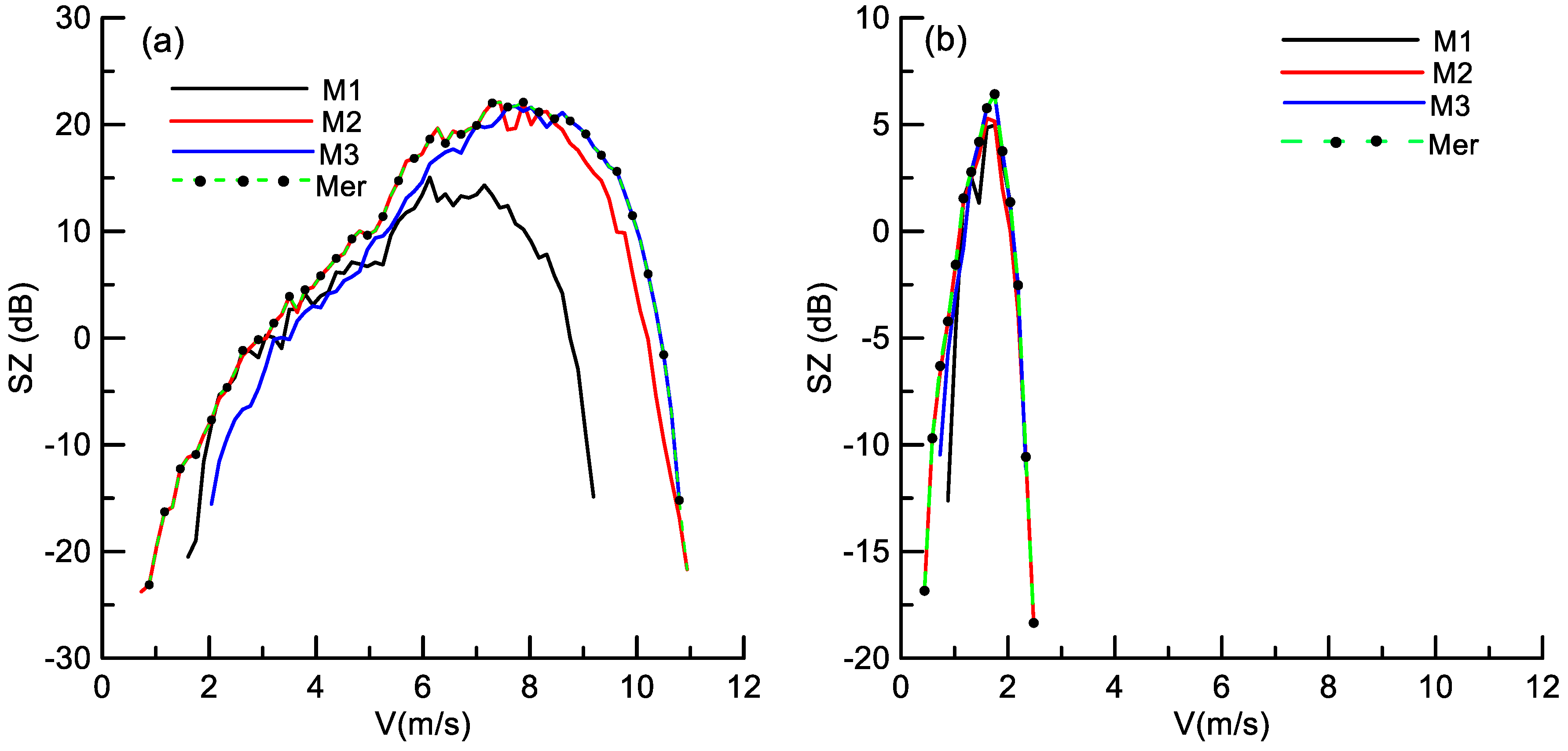
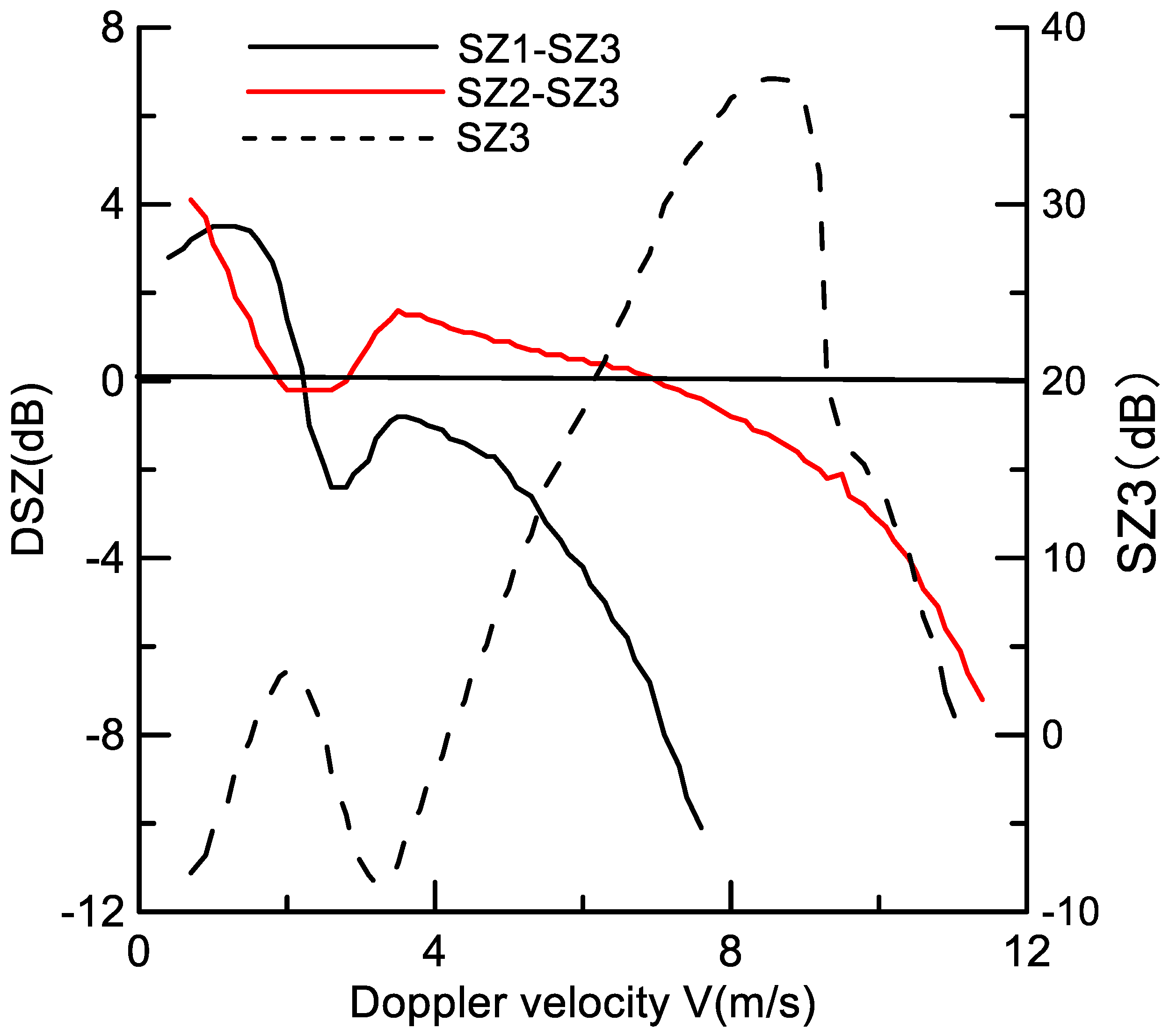
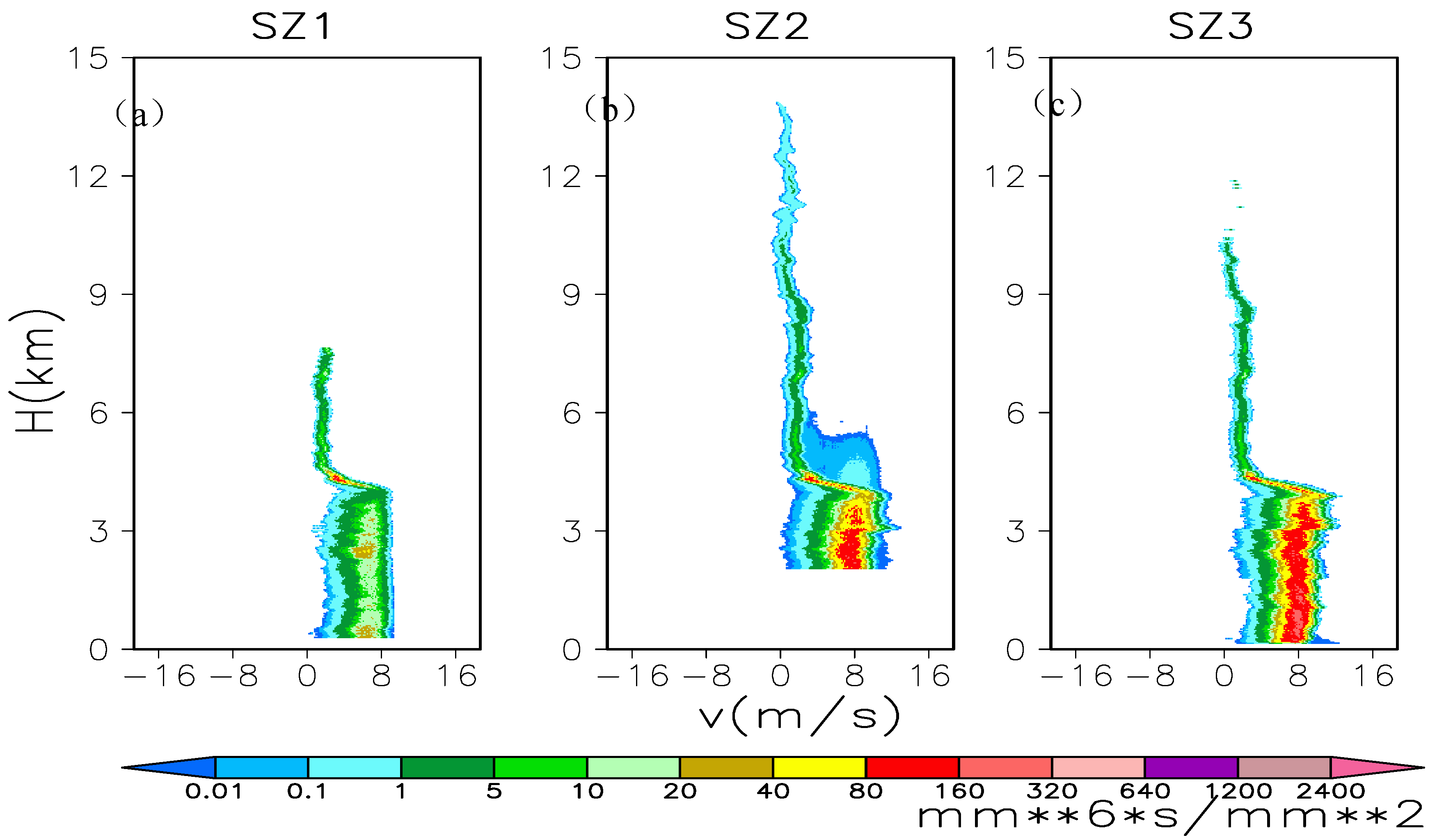
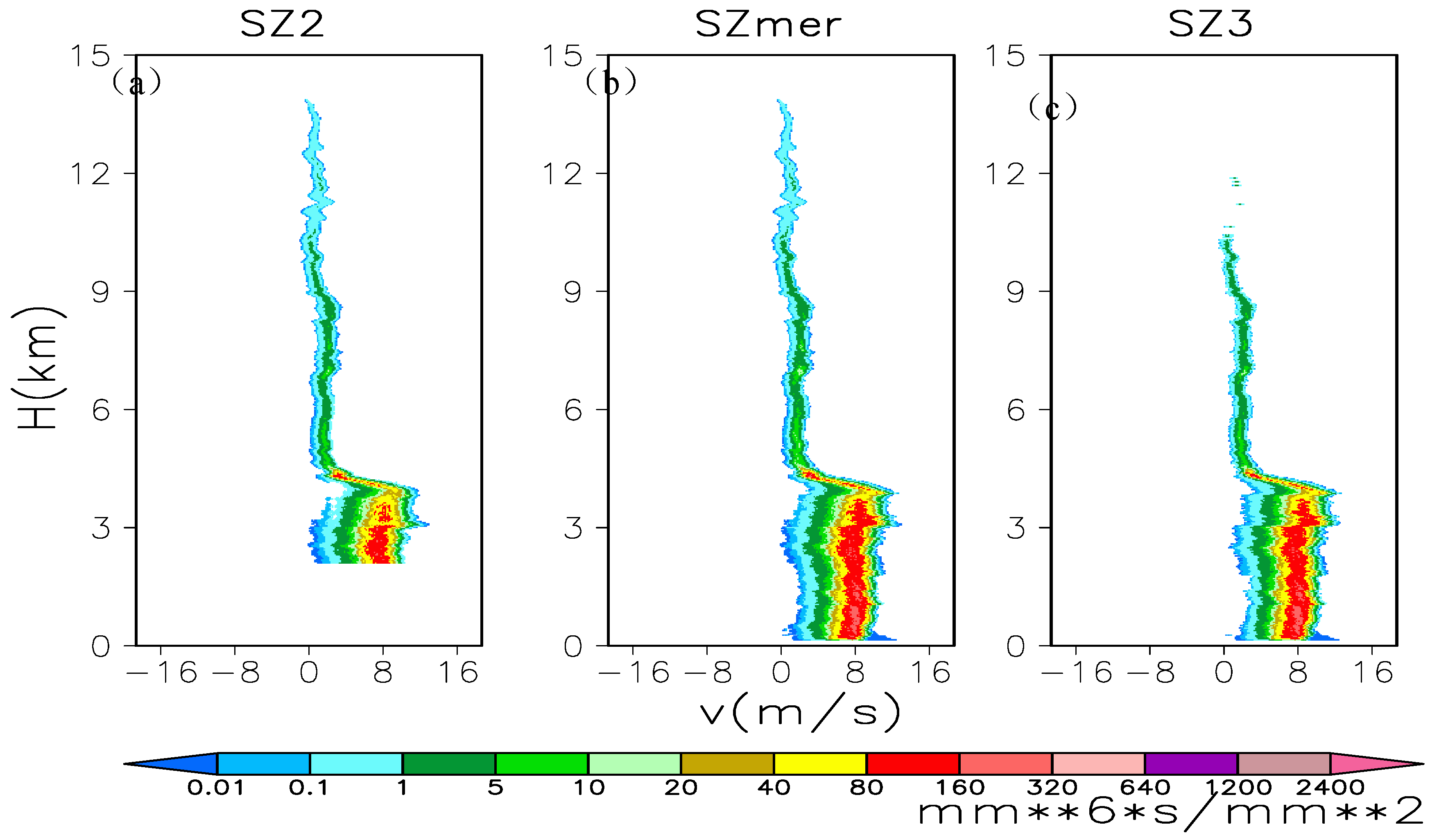
3.1.2. Consistency Analysis of Doppler Spectral Density for the Three Modes
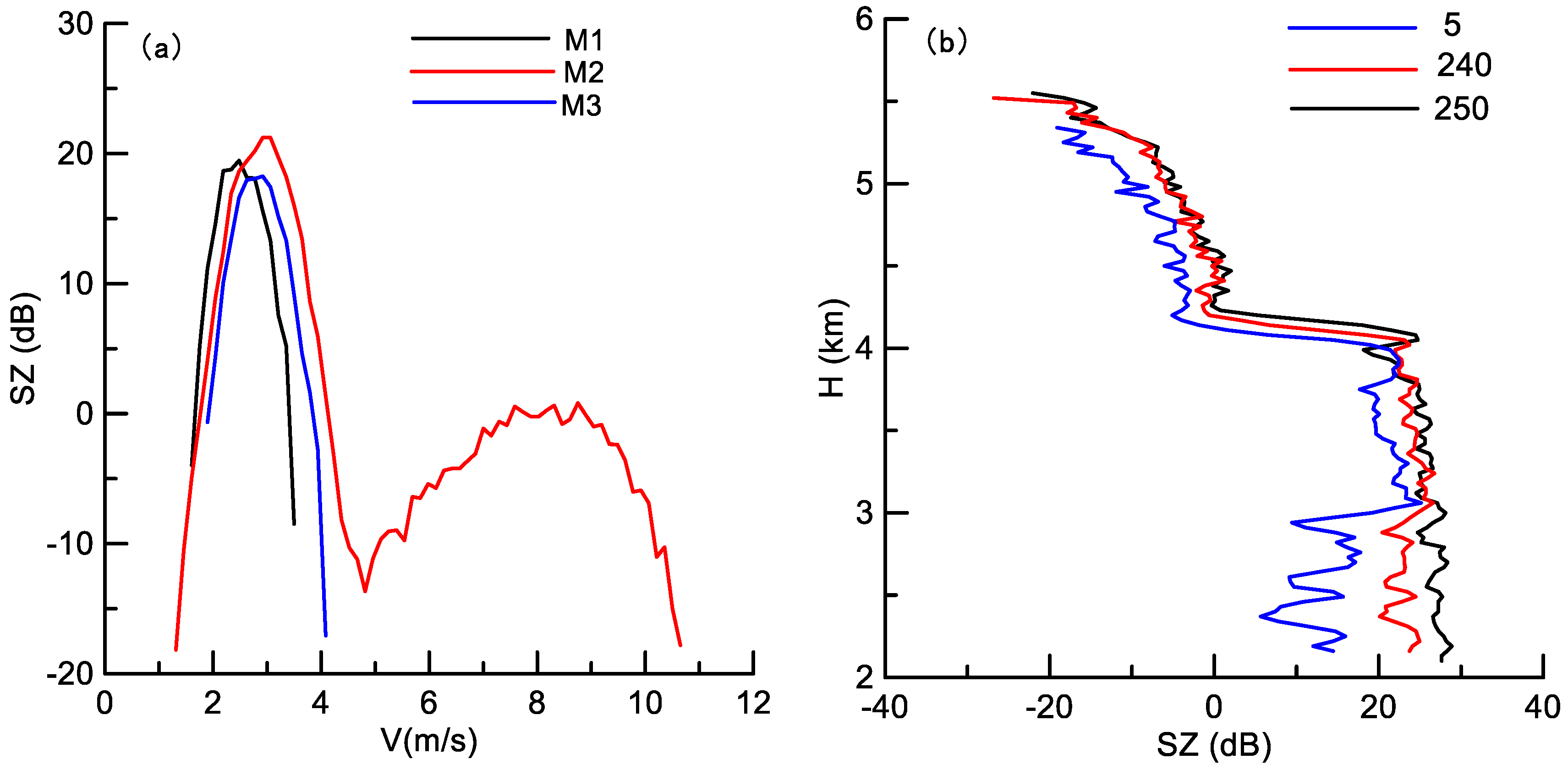
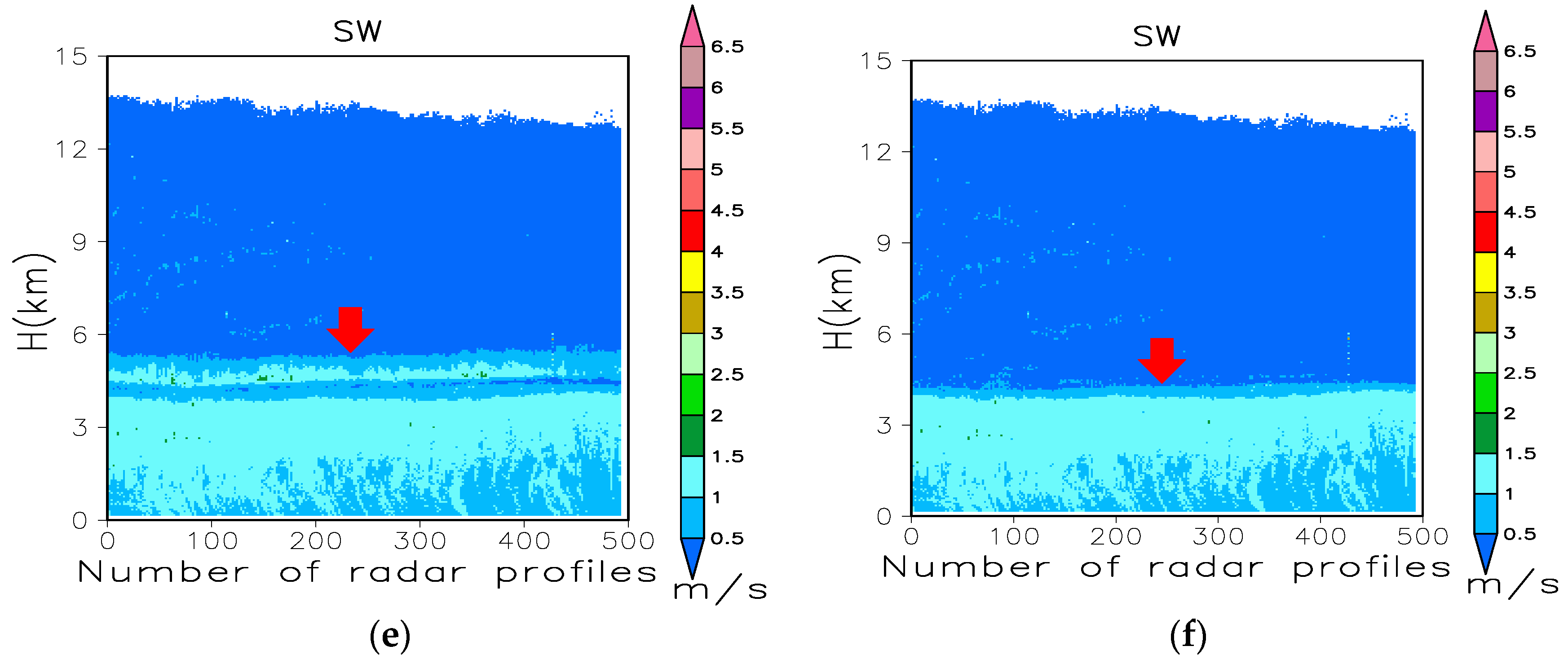
3.1.3. Pulse Compression Effects on SZ2
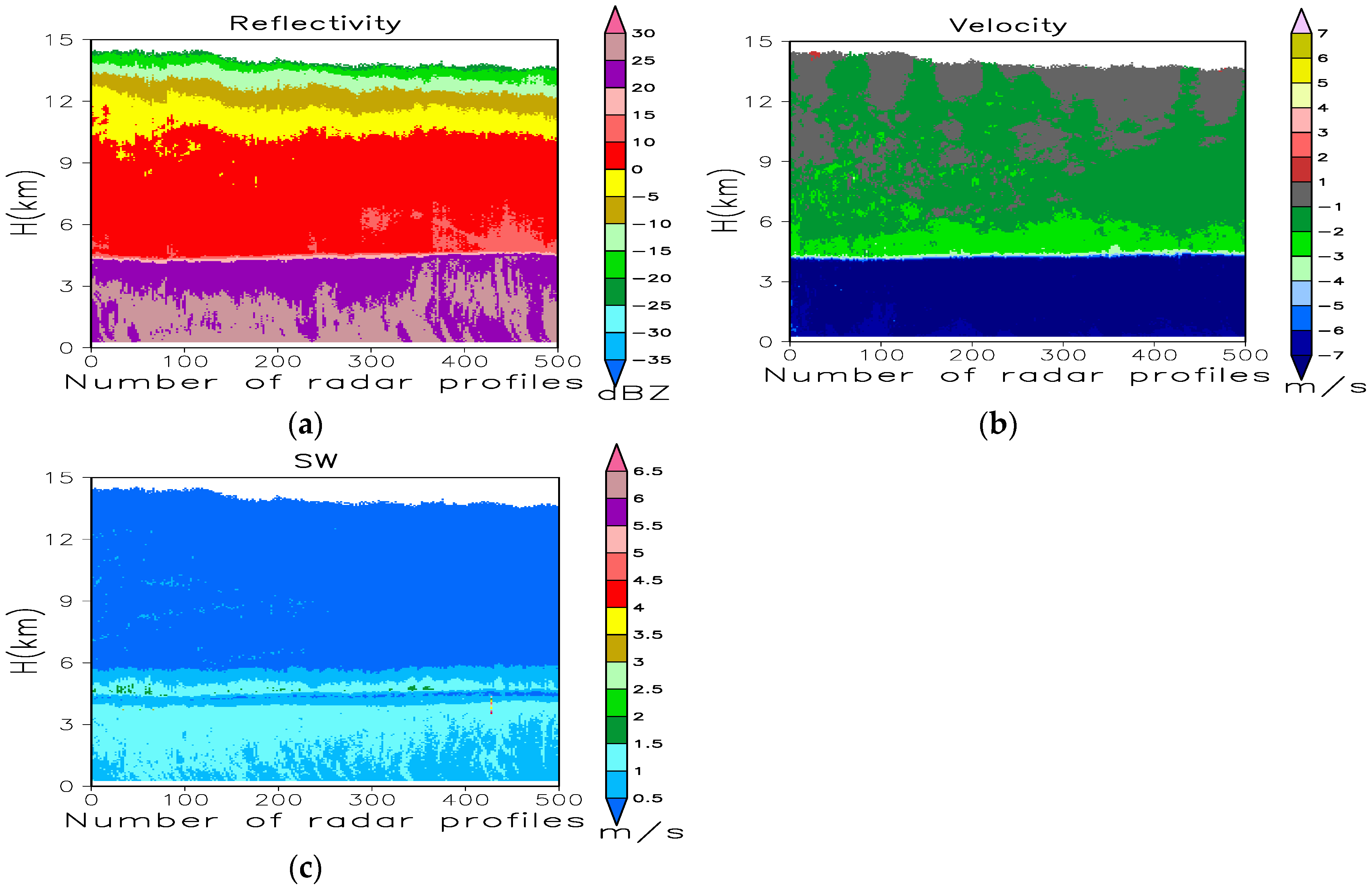
3.2. SZ Quality Control and Merging Result
4. Discussion
5. Conclusions
- (i)
- In mode M1, four rounds of coherent integration with a PRF of 8333 Hz underestimated the reflectivity spectra for Doppler velocities exceeding 2 m·s−1. This resulted in a large negative bias in the reflectivity and radial velocity when large drops were present. The reflectivity spectra were underestimated by mode M3 at low SNR. Additionally, two rounds of coherent integration in M2 had less of an effect on the reflectivity spectra.
- (ii)
- Pulse compression in M2 improved the radar sensitivity and air vertical speed observation, whereas M3 overestimated V0. This resulted in an underestimation of the number of big drops and an overestimation of the number of small drops. The number of larger drops was underestimated by M1.
- (iii)
- A comparison of the three individual spectra from modes M1, M2, and M3 showed that the merged reflectivity spectra filled in the gaps during weak cloud periods, reduced the effects of coherent integration and pulse compression in liquid precipitation, mitigated the aliasing of Doppler velocity, and removed the artefacts. The range sidelobe produced by pulse compression could be easily removed from the Doppler spectral density data than from the reflectivity data.
- (iv)
- The reflectivity, radial velocity, and spectral width recalculated from the merged reflectivity spectra were immune to the effects of coherent integration and pulse compression, and were consistent for clouds and weak and intermediate precipitation.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Moran, K.P.; Martner, B.E.; Post, M.J.; Kropfli, R.A.; Welsh, D.C.; Widener, K.B. An unattended cloud-profiling radar for use in climate research. Bull. Am. Meteorol. Soc. 1998, 79, 443–455. [Google Scholar] [CrossRef]
- Clothiaux, E.E.; Moran, K.P.; Martner, B.E.; Ackerman, T.P.; Mace, G.G.; Uttal, T.; Mather, J.H.; Widener, K.B.; Miller, M.A.; Rodriguez, D.J. The Atmospheric Radiation Measurement Program Cloud Radars: Operational Modes. J. Atmos. Ocean. Technol. 1999, 16, 819–827. [Google Scholar] [CrossRef]
- Schmidt, G.; Ruster, R.; Czechowsky, P. Complementary code and digital filtering for detection of weak VHF radar signals from the mesosphere. IEEE Trans. Geosci. Electron. 1979, 17, 154–161. [Google Scholar] [CrossRef]
- Clothiaux, E.E.; Thomas, P.A.; Mace, G.G.; Moran, K.P.; Marchand, R.T.; Miller, M.A.; Martner, B.E. Objective Determination of Cloud Heights and Radar Reflectivities Using a Combination of Active Remote Sensors at the ARM CART Sites. J. Appl. Meteorol. 2000, 39, 645–665. [Google Scholar] [CrossRef]
- Kollias, P.; Clothiaus, E.E.; Miller, M.A.; Luke, E.P.; Johnson, K.L.; Moran, K.P.; Widener, K.B.; Albrecht, B.A. The atmospheric radiation measurement program cloud profiling radars: Second-generation sampling stratrgies, processing and cloud data products. J. Atmos. Ocean. Technol. 2007, 24, 1119–1214. [Google Scholar] [CrossRef]
- Sokol, Z.; Minářová, J.; Novák, P. Classification of Hydrometeors Using Measurements of the Ka-Band Cloud Radar Installed at the Milešovka Mountain (Central Europe). Remote Sens. 2018, 10, 1674. [Google Scholar] [CrossRef]
- Lhermitte, R. Observations of rain at vertical incidence with a 94 GHz Doppler radar: An insight of Mie scattering. Geophys. Res. Lett. 1988, 15, 1125–1128. [Google Scholar] [CrossRef]
- Kollias, P.; Albrecht, B.A.; Marks, F.D., Jr. Cloud radar observations of vertical drafts and microphysics in convective rain. J. Geophys. Res. 2003, 108, 40–53. [Google Scholar] [CrossRef]
- Gossard, E.E.; Strauch, R.G. Measurement of cloud droplet size spectra by Doppler radar. J. Atmos. Ocean. Technol. 1994, 11, 712–726. [Google Scholar] [CrossRef]
- Kollias, P.; Albrecht, B.A.; Lhermitte, R.; Savtchenko, A. Radar observations of updrafts, downdrafts, and turbulence in fair weather cumuli. J. Atmos. Sci. 2001, 58, 1750–1766. [Google Scholar] [CrossRef]
- Shupe, M.D.; Kollias, P.; Matrosov, S.Y.; Schneider, T.L. Deriving mixed-phase cloud properties from Doppler radar spectra. J. Atmos. Ocean. Technol. 2004, 21, 660–670. [Google Scholar] [CrossRef]
- Shupe, M.D.; Koliias, P.; Matrosov, M.; Eloranta, E. On deriving vertical air motions from cloud radar Doppler spectra. J. Atmos. Ocean. Technol. 2008, 25, 547–557. [Google Scholar] [CrossRef]
- Liu, L.P.; Xie, L.; Cui, Z.; Li, X. The examination and application of Doppler spectral density data in drop size distribution retrieval in weak precipitation by cloud radar. Atmos. Phys. 2014, 38, 223–236. (In Chinese) [Google Scholar]
- Liu, L.P.; Zheng, J.F.; Ruan, Z.; Hu, Z.Q.; Cui, Z.H. Comprehensive Radar Observations of Clouds and Precipitation over the Tibetan Plateau and Preliminary Analysis of Cloud Properties. J. Meteorol. Res. 2015, 29, 546–561. [Google Scholar] [CrossRef]
- Liu, L.P.; Zheng, J.F.; Wu, J.Y. A Ka-band solid-state transmitter cloud radar and data merging algorithm for its measurements. Adv. Atmos. Sci. 2017, 34, 545–558. [Google Scholar] [CrossRef]
- Zheng, J.F.; Liu, L.P.; Zhu, K.Y.; Wu, J.Y.; Wang, B.Y. A Method for Retrieving Vertical Air Velocities in Convective Clouds over the Tibetan Plateau from TIPEX-III Cloud Radar Doppler Spectra. Remote Sens. 2017, 9, 964. [Google Scholar] [CrossRef]
- Kollias, P.; Albrecht, B.A.; Clothiaux, E.E.; Miller, M.A.; Johnson, K.L.; Moran, K.P. The Atmospheric Radiation Measurement Program Cloud Profiling Radars: An Evaluation of Signal Processing and Sampling Strategies. J. Atmos. Ocean. Technol. 2005, 22, 930–948. [Google Scholar] [CrossRef]
- Hildebrand, P.H.; Sekhon, R.S. Objective determination of the noise level in Doppler spectra. J. Appl. Meteorol. 1974, 13, 808–811. [Google Scholar] [CrossRef]
- Petitdidier, M.; Sy, A.; Garrouste, A.; Delcourt, J. Statistical characteristics of the noise power spectral density in UHF and VHF wind profilers. Radio Sci. 1997, 32, 1229–1247. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order | Items | Technical Specifications |
|---|---|---|
| General technical parameters of the cloud radar system | ||
| 1 | Radar system | Coherent, pulsed Doppler, solid-state transmitter, pulse compression |
| 2 | Radar frequency | 33.44 GHz (Ka-band) |
| 3 | Beam width | 0.35° |
| 4 | Pulse repeat frequency | 8333 Hz |
| 5 | Detecting parameters | Z, Vr, Sw, LDR, SP |
| 6 | Detection capability | ≤−30 dBZ at 5 km |
| 7 | Range of detection | Height: 0.120–15 km reflectivity: −50 dBZ to +30 dBZ radial velocity: −18.67 m·s−1 to 18.67 m·s−1 (maximum) velocity spectrum width: 0 m·s−1 to 4 m·s−1 (maximum) |
| 8 | Spatial and temporal resolutions | Temporal resolution: 3–9 s (adjustable) Height resolution: 30 m |
| Order | Items | Boundary Mode (M1) | Cirrus Mode (M2) | Precipitation Mode (M3) |
|---|---|---|---|---|
| 1 | τ | 0.2 μs | 12 μs | 0.2 μs |
| 2 | PRF | 8333 Hz | 8333 Hz | 8333 Hz |
| 3 | Ncoh | 4 | 2 | 1 |
| 4 | Nncoh | 16 | 32 | 64 |
| 5 | NFFT | 256 | 256 | 256 |
| 6 | Dwell time | 2 s | 2 s | 2 s |
| 7 | Numgate | 256,128 | 512,256 | 512,256 |
| 8 | Rspace | 30 m | 30 m | 30 m |
| 9 | Rmin | 30 m (theoretical) 120 m (practical) | 1800 m (theoretical) 2010 m (practical) | 30 m (theoretical) 120 m (practical) |
| 10 | Rmax | 18 km | 18 km | 18 km |
| 11 | Vmax | 4.67 m·s−1 | 9.34 m·s−1 | 18.67 m·s−1 |
| 12 | ΔV | 0.036 m·s−1 | 0.072 m·s−1 | 0.145 m·s−1 |
| Work Mode | Experiment | Z (dBZ) | V0 (m·s−1) | R (mm·h−1) | LWC (g·m−3) | Na (m−3) | Dm (mm) |
|---|---|---|---|---|---|---|---|
| M1 | T1 | 17.8 | 0.95 | 0.39 | 0.029 | 449 | 1.01 |
| T2 | 17.8 | 1.8 | 0.67 | 0.065 | 3144 | 0.67 | |
| T3 | 17.8 | 0 | 0.21 | 0.012 | 42 | 1.63 | |
| M2 | T1 | 25.6 | 0.95 | 1.33 | 0.07 | 787 | 1.13 |
| T2 | 25.6 | 0.95 | 1.33 | 0.07 | 787 | 1.13 | |
| T3 | 25.6 | 0 | 0.85 | 0.038 | 96 | 1.8 | |
| M3 | T1 | 25.0 | 0.95 | 1.01 | 0.05 | 196 | 1.59 |
| T2 | 25.0 | 2.12 | 2.04 | 0.145 | 2629 | 0.94 | |
| T3 | 25.0 | 0 | 0.87 | 0.03 | 26 | 2.6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Zheng, J. Algorithms for Doppler Spectral Density Data Quality Control and Merging for the Ka-Band Solid-State Transmitter Cloud Radar. Remote Sens. 2019, 11, 209. https://doi.org/10.3390/rs11020209
Liu L, Zheng J. Algorithms for Doppler Spectral Density Data Quality Control and Merging for the Ka-Band Solid-State Transmitter Cloud Radar. Remote Sensing. 2019; 11(2):209. https://doi.org/10.3390/rs11020209
Chicago/Turabian StyleLiu, Liping, and Jiafeng Zheng. 2019. "Algorithms for Doppler Spectral Density Data Quality Control and Merging for the Ka-Band Solid-State Transmitter Cloud Radar" Remote Sensing 11, no. 2: 209. https://doi.org/10.3390/rs11020209
APA StyleLiu, L., & Zheng, J. (2019). Algorithms for Doppler Spectral Density Data Quality Control and Merging for the Ka-Band Solid-State Transmitter Cloud Radar. Remote Sensing, 11(2), 209. https://doi.org/10.3390/rs11020209