Bus Voltage Stabilization of a Sustainable Photovoltaic-Fed DC Microgrid with Hybrid Energy Storage Systems


Abstract
1. Introduction
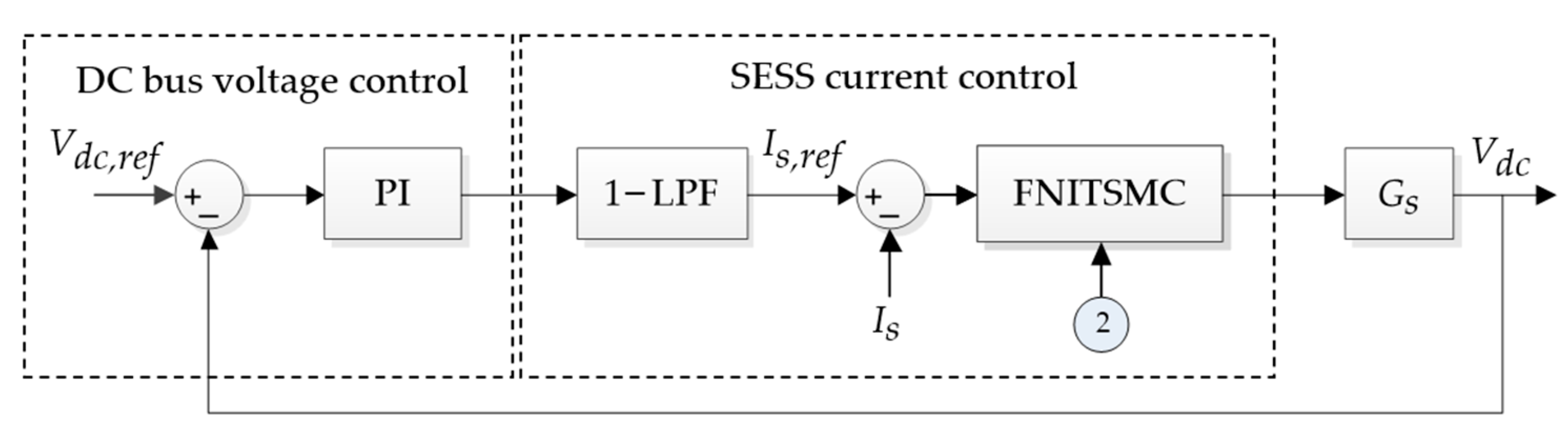
- The PI controls the DC bus voltage and generates a total current reference for the HESS. Using an LPF, the total current is split up into low- and high-frequency components serving as references for BESS and SESS, respectively.
- FNITSMC adjusts the PWM of the bidirectional Ćuk converters for the BESS and SESS to control the power balance of the DC microgrid. The BESS compensates for the steady-state power demands, whereas the SESS compensates for the transient ones.
- The design of FNITSMC with a modified nonlinear sliding surface that helps the system states achieve faster convergence to the equilibrium.
- The design of a PI-FNITSMC-based current sharing controller for HESSs using bidirectional DC–DC Ćuk converters with improved performance characteristics, good stability (transient performance), faster and more precise tracking, and robustness to uncertainties and disturbances.
- Verification of the performance of the proposed controller with load, temperature, and irradiance variations using the Typhoon™ HIL-402 system.
2. Modeling of the PV-Fed DC Microgrid with HESS
2.1. Boost Converter for PV Energy Conversion System
2.2. Bidirectional Ćuk Converter for HESS
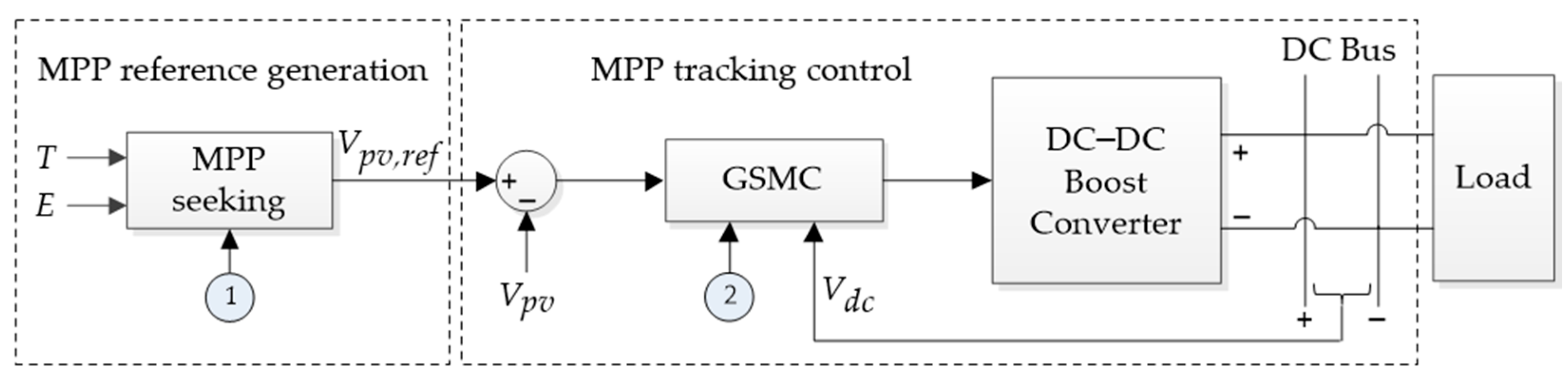
3. GSMC-MPPT Controller for Maximum PV Energy Extraction
4. PI-FNITSMC DC Bus Voltage and Current Control with HESS

4.1. DC Bus Voltage Control Using PI
4.2. HESS Current Control Using FNITSMC
5. Results and Discussion
- A DC microgrid consisting of a PV system, an HESS, and load is designed using the Typhoon™ HIL Control Center software V2023.2.
- Similarly, the MPPT controller based on GSMC and PI-FNITSMCs for both the BESS and SESS are also designed using the Typhoon™ HIL Control Center software V2023.2.
- A complete simulation model is compiled and uploaded to the Typhoon™ HIL-402.
- Simulation parameters like sampling time and execution time are also set. The sampling time is set in a way that the achieved results are close to the real time. For example, an execution of the system for 24 s took almost 33 s at 200 ksps to achieve the best possible results. This total time included the overhead of data gathering and transportation to the main personal computer (PC).
- The real-time simulations are conducted, and the results are communicated back to the PC after the completion of each simulation.
- The results are plotted in Matlab™ to make it easier for further processing and displaying specific information.
5.1. MPPT Power Extraction under Standard Operating Conditions
5.2. PI Gain Selection
5.3. Case 1: HESS Discharging under Resistive Load
5.4. Case 2: HESS Charging and Discharging under Resistive Load
5.5. Case 3: HESS Charging and Discharging under Load Variations at Varying Irradiance and Temperature Levels
5.6. Discussion on the Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Abbreviation | Definition | Abbreviation | Definition |
| PV | Photovoltaic | Duty ratio of the PWM input | |
| ESS | Energy storage system | ||
| HESS | Hybrid energy storage system | PV reference voltage | |
| LPF | Low-pass filter | Number of PV cells in series | |
| HIL | Hardware-in-the-loop | Blotsmann’s constant | |
| MPP | Maximum power point | P-N junction characteristic | |
| MPPT | MPP tracking | Cell temperature | |
| PI | Proportional–integral | Irradiance | |
| SMC | Sliding mode control | Reverse saturation current | |
| MPC | Model predictive control | Electron charge | |
| FLC | Fuzzy logic control | Photocurrent | |
| VRD | Virtual resistance droop | Cell short-circuit current | |
| VCD | Virtual capacitance droop | Short-circuit current coefficient | |
| GSMC | Global SMC | Open-circuit voltage | |
| BESS | Battery ESS | Band-gap energy | |
| SESS | Supercapacitor ESS | Sliding surface of GSMC | |
| FNITSMC | Fast nonsingular integral terminal SMC | Tracking error of | |
| PWM | Pulse width modulation | Signum function | |
| IAE | Integral absolute error | Saturation function | |
| ITAE | Integral time absolute error | PWM input | |
| Inductor current of PV converter | Equivalent control in GSMC | ||
| PV output voltage | Switching control in GSMC | ||
| Inductance of PV converter | Switching control gain for PV | ||
| Capacitance of PV converter | Reference current of ESS | ||
| DC bus voltage | Sliding surface of FNITSMC | ||
| Duty ratio of PV converter | Tracking error of | ||
| ,, | PV parameters | Switching control gain for ESS | |
| For BESS | ,, | HESS parameters | |
| For SESS | Equivalent control in FNITSMC | ||
| Voltage of the ESS | Switching control in FNITSMC | ||
| Voltage of Ćuk converter’s | Proportional gain of PI controller | ||
| Voltage of Ćuk converter’s | Integral gain of PI controller | ||
| Voltage of Ćuk converter’s | DC voltage reference | ||
| Voltage of Ćuk converter’s | Current reference for BESS | ||
| Load | Current reference for SESS |
References
- REN21. Renewables 2023 Global Status Report Collection, Renewables in Energy Supply; REN21: Paris, France, 2023. [Google Scholar]
- REN21. Renewables 2023 Global Status Report Collection, Renewables in Energy Demand; REN21: Paris, France, 2023. [Google Scholar]
- Shaik, F.; Lingala, S.S.; Veeraboina, P. Effect of various parameters on the performance of solar PV power plant: A review and the experimental study. Sustain. Energy Res. 2023, 10, 6. [Google Scholar] [CrossRef]
- Lee, J.; Shepley, M.M.C. Benefits of solar photovoltaic systems for low-income families in social housing of Korea: Renewable energy applications as solutions to energy poverty. J. Build. Eng. 2020, 28, 101016. [Google Scholar] [CrossRef]
- Karanayil, B.; Ceballos, S.; Pou, J. Maximum Power Point Controller for Large Scale Photovoltaic Power Plants Using Central Inverters under Partial Shading Conditions. IEEE Trans. Power Electron. 2018, 34, 3098–3109. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, B.; Gamage, D.; Ukil, A. Model predictive and iterative learning control based hybrid control method for hybrid energy storage system. IEEE Trans. Sustain. Energy 2021, 12, 2146–2158. [Google Scholar] [CrossRef]
- Wang, X.; Yu, D.; Le Blond, S.; Zhao, Z.; Wilson, P. A novel controller of a battery-supercapacitor hybrid energy storage system for domestic applications. Energy Build. 2017, 141, 167–174. [Google Scholar] [CrossRef]
- Lin, P.; Deng, C.; Yang, Y.; Lee, C.H.T.; Tay, W.P. Resilience-Oriented Control for Cyber-Physical Hybrid Energy Storage Systems Using a Semiconsensus Scheme: Design and Practice. IEEE Trans. Ind. Electron. 2023, 70, 2508–2519. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, P.; Jiang, W.; Wang, P.A. Decentralized Automatic Load Power Allocation Strategy for Hybrid Energy Storage System. IEEE Trans. Energy Convers. 2021, 36, 2227–2238. [Google Scholar] [CrossRef]
- Javed, K.; Ashfaq, H.; Singh, R.; Hussain, S.M.S.; Ustun, T.S. Design and performance analysis of a stand-alone PV system with hybrid energy storage for rural India. Electronics 2019, 8, 952. [Google Scholar] [CrossRef]
- Lu, Y.; Liu, Z.; Lyu, J.; Wei, X. Hierarchical Power Allocation Control for Star-Connected Hybrid Energy Storage System Using Cascaded Multilevel Converters. Front. Energy Res. 2021, 9, 748508. [Google Scholar] [CrossRef]
- Kakigano, H.; Miura, Y.; Ise, T. Distribution voltage control for DC microgrids using fuzzy control and gain-scheduling technique. IEEE Trans. Power Electron. 2013, 28, 2246–2258. [Google Scholar] [CrossRef]
- Mumtaz, F.; Zaihar Yahaya, N.; Tanzim Meraj, S.; Singh, B.; Kannan, R.; Ibrahim, O. Review on non-isolated DC-DC converters and their control techniques for renewable energy applications. Ain Shams Eng. J. 2021, 12, 3747–3763. [Google Scholar] [CrossRef]
- Magzoub, M.A.; Alquthami, T. Optimal Design of Automatic Generation Control Based on Simulated Annealing in Interconnected Two-Area Power System Using Hybrid PID-Fuzzy Control. Energies 2022, 15, 1540. [Google Scholar] [CrossRef]
- Yang, N.; Paire, D.; Gao, F.; Miraoui, A.; Liu, W. Compensation of droop control using common load condition in DC microgrids to improve voltage regulation and load sharing. Int. J. Electr. Power Energy Syst. 2015, 64, 752–760. [Google Scholar] [CrossRef]
- Dragicevic, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC Microgrids—Part I: A Review of Control Strategies and Stabilization Techniques. IEEE Trans. Power Electron. 2016, 31, 4876–4891. [Google Scholar] [CrossRef]
- Guo, F.; Wen, C.; Mao, J.; Song, Y.D. Distributed Secondary Voltage and Frequency Restoration Control of Droop-Controlled Inverter-Based Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4355–4364. [Google Scholar] [CrossRef]
- Xu, Q.; Hu, X.; Wang, P.; Xiao, J.; Tu, P.; Wen, C.; Lee, M.Y. A Decentralized Dynamic Power Sharing Strategy for Hybrid Energy Storage System in Autonomous DC Microgrid. IEEE Trans. Ind. Electron. 2017, 64, 5930–5941. [Google Scholar] [CrossRef]
- Xu, Q.; Xiao, J.; Wang, P.; Pan, X.; Wen, C. A Decentralized Control Strategy for Autonomous Transient Power Sharing and State-of-Charge Recovery in Hybrid Energy Storage Systems. IEEE Trans. Sustain. Energy 2017, 8, 1443–1452. [Google Scholar] [CrossRef]
- Xu, Q.; Xiao, J.; Hu, X.; Wang, P.; Lee, M.Y. A Decentralized Power Management Strategy for Hybrid Energy Storage System with Autonomous Bus Voltage Restoration and State-of-Charge Recovery. IEEE Trans. Ind. Electron. 2017, 64, 7098–7108. [Google Scholar] [CrossRef]
- Ramos, G.A.; Costa-Castelló, R. Energy Management Strategies for Hybrid Energy Storage Systems Based on Filter Control: Analysis and Comparison. Electronics 2022, 11, 1631. [Google Scholar] [CrossRef]
- Vijayan, M.; Udumula, R.R.; Mahto, T.; Lokeshgupta, B.; Goud, B.S.; Kalyan, C.N.S.; Balachandran, P.K.; Padmanaban, S.; Twala, B. Optimal PI-Controller-Based Hybrid Energy Storage System in DC Microgrid. Sustainability 2022, 14, 14666. [Google Scholar] [CrossRef]
- Joshi, M.C.; Samanta, S. Improved Energy Management Algorithm with Time Share Based UC Charging/Discharging for Hybrid Energy Storage System. IEEE Trans. Ind. Electron. 2018, 66, 6032–6043. [Google Scholar] [CrossRef]
- Cabrane, Z.; Ouassaid, M.; Maaroufi, M.; Marhraoui, S.; Hichami, N.L. Two proposed Control Algorithm of the Management of Supercapacitors-Batteries combination in Photovoltaic Energy Storage. In Proceedings of the 2018 6th International Renewable and Sustainable Energy Conference (IRSEC), Rabat, Morocco, 5–8 December 2018. [Google Scholar]
- Cabrane, Z.; Ouassaid, M.; Maaroufi, M. Battery and supercapacitor for photovoltaic energy storage: A fuzzy logic management. IET Renew. Power Gener. 2017, 11, 1157–1165. [Google Scholar] [CrossRef]
- Cabrane, Z.; Kim, J.; Yoo, K.; Ouassaid, M. HESS-based photovoltaic/batteries/supercapacitors: Energy management strategy and DC bus voltage stabilization. Sol. Energy 2020, 216, 551–563. [Google Scholar] [CrossRef]
- Hredzak, B.; Agelidis, V.G. Model predictive control of a hybrid battery-ultracapacitor power source. In Proceedings of the 7th International Power Electronics and Motion Control Conference (IPEMC), Harbin, China, 2–5 June 2012; pp. 2294–2299. [Google Scholar]
- Hredzak, B.; Agelidis, V.G.; Jang, M. A model predictive control system for a hybrid battery-ultracapacitor power source. IEEE Trans. Power Electron. 2014, 29, 1469–1479. [Google Scholar] [CrossRef]
- Song, Z.; Park, H.; Delgado, F.P.; Wang, H.; Li, Z.; Hofmann, H.; Sun, J.; Hou, J. Simultaneous identification and control for hybrid energy storage system using model predictive control and active signal injection. IEEE Trans. Ind. Electron. 2020, 67, 9768–9778. [Google Scholar] [CrossRef]
- Hou, J.; Song, Z.; Hofmann, H.; Sun, J. Adaptive model predictive control for hybrid energy storage energy management in all-electric ship microgrids. Energy Convers. Manag. 2019, 198, 111929. [Google Scholar] [CrossRef]
- Muktiadji, R.F.; Ramli, M.A.M.; Bouchekara, H.R.E.H.; Milyani, A.H.; Rawa, M.; Seedahmed, M.M.A.; Budiman, F.N. Control of Boost Converter Using Observer-Based Backstepping Sliding Mode Control for DC Microgrid. Front. Energy Res. 2022, 10, 828978. [Google Scholar] [CrossRef]
- Ma’arif, A.; Vera MA, M.; Mahmoud, M.S.; Ladaci, S.; Cakan, A.; Parada, J.N. Backstepping Sliding Mode Control for Inverted Pendulum System with Disturbance and Parameter Uncertainty. J. Robot. Control. 2022, 3, 86–92. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X. Advanced Sliding Mode Control for Mechanical Systems; Tsinghua University Press: Beijing, China, 2012. [Google Scholar]
- Zhihong, M.; Yu, X.H. Terminal Sliding Mode Control of MIMO Linear Systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1996, 44, 1065–1069. [Google Scholar] [CrossRef]
- Singh, P.; Lather, J.S. Dynamic current sharing, voltage, and SOC regulation for HESS based DC microgrid using CPISMC technique. J. Energy Storage 2020, 30, 101509. [Google Scholar] [CrossRef]
- Abianeh, A.J.; Ferdowsi, F. Sliding Mode Control Enabled Energy Storage System for Islanded DC Microgrids with Pulsing Loads. Sustain. Cities Soc. 2021, 73, 103117. [Google Scholar] [CrossRef]
- Fu, D.; Zhao, X. A Novel Robust Adaptive Nonsingular Fast Integral Terminal Sliding Mode Controller for Permanent Magnet Linear Synchronous Motors. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 1672–1683. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Trajectory Tracking Control of AUVs via Adaptive Fast Nonsingular Integral Terminal Sliding Mode Control. IEEE Trans. Ind. Inform. 2020, 16, 1248–1258. [Google Scholar] [CrossRef]
- Safari, A.; Mekhilef, S. Simulation and hardware implementation of incremental conductance MPPT with direct control method using Ćuk converter. IEEE Trans. Ind. Electron. 2011, 58, 1154–1161. [Google Scholar] [CrossRef]
- Hu, W.; Ding, Z.; Yang, H.; Tao, J.; Wang, X. Stability analysis and stabilization of Ćuk converter with constant power load. Int. J. Circuit Theory Appl. 2023, 51, 1685–1696. [Google Scholar] [CrossRef]
- Mahafzah, K.A.; Al-Shetwi, A.Q.; Hannan, M.A.; Babu, T.S.; Nwulu, N. A New Cuk-Based DC-DC Converter with Improved Efficiency and Lower Rated Voltage of Coupling Capacitor. Sustainability 2023, 15, 8515. [Google Scholar] [CrossRef]
- Uswarman, R.; Munawar, K.; Ramli, M.A.M.; Bouchekara, H.R.E.H.; Hossain, M.A. Maximum Power Point Tracking in Photovoltaic Systems Based on Global Sliding Mode Control with Adaptive Gain Scheduling. Electronics 2023, 12, 1128. [Google Scholar] [CrossRef]
- Khan, K.A.; Khalid, M. Improving the Transient Response of Hybrid Energy Storage System for Voltage Stability in DC Microgrids Using an Autonomous Control Strategy. IEEE Access 2021, 9, 10460–10472. [Google Scholar] [CrossRef]
- Wang, B.; Manandhar, U.; Zhang, X.; Gooi, H.B.; Ukil, A. Deadbeat Control for Hybrid Energy Storage Systems in DC Microgrids. IEEE Trans. Sustain. Energy 2019, 10, 1867–1877. [Google Scholar] [CrossRef]
- Martinez-Trevino, B.A.; El Aroudi, A.; Cid-Pastor, A.; Garcia, G.; Martinez-Salamero, L. Synthesis of Constant Power Loads Using Switching Converters under Sliding-Mode Control. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 524–535. [Google Scholar] [CrossRef]
- Ramos-Paja, C.A.; Gonzalez Montoya, D.; Bastidas-Rodríguez, J.D. Sliding-mode control of a Ćuk converter for voltage regulation of a dc-bus. Sustain. Energy Technol. Assess. 2020, 42, 100807. [Google Scholar] [CrossRef]
- Dahech, K.; Allouche, M.; Damak, T.; Tadeo, F. Backstepping sliding mode control for maximum power point tracking of a photovoltaic system. Electr. Power Syst. Res. 2017, 143, 182–188. [Google Scholar] [CrossRef]
- Suryawanshi, P.V.; Shendge, P.D.; Phadke, S.B. A boundary layer sliding mode control design for chatter reduction using uncertainty and disturbance estimator. Int. J. Dynamic. Control. 2016, 4, 456–465. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, Y.; Zhang, X.; Liang, J.; Cheng, X. New Reaching Law Control for Permanent Magnet Synchronous Motor with Extended Disturbance Observer. IEEE Access 2019, 7, 186296–186307. [Google Scholar] [CrossRef]
- Garg, M.M.; Hote, Y.V.; Pathak, M.K. Leverrier’s Algorithm based Modeling of HIgher-order dc-dc Converters. In Proceedings of the 2012 IEEE 5th India International Conference on Power Electronics (IICPE), Delhi, India, 6–8 December 2012; pp. 1–6. [Google Scholar]
- Arunkumar, C.R.; Manthati, U.B. A Hybrid Controller Assisted Voltage Regulation and Power Splitting Strategy for Battery/Supercapacitor System in Isolated DC Microgrid. IEEE Trans. Energy Convers. 2023, 38, 1544–1553. [Google Scholar]
- Majji, R.K.; Mishra, J.P.; Dongre, A.A. Model predictive control based autonomous DC microgrid integrated with solar photovoltaic system and composite energy storage. Sustain. Energy Technol. Assess. 2022, 54, 102862. [Google Scholar] [CrossRef]
- Kathi, L. Small-Signal Analysis of Non-Isolated Ćuk DC-DC Converter. Ph.D. Thesis, Wright State University, Dayton, OH, USA, 2020. [Google Scholar]
- Rytkonen, F.J.; Tymerski, R. Modern Control Regulator Design for DC-DC Converters; Portland State University: Portland, OR, USA, 2005. [Google Scholar]
- Su, J.; Li, K.; Zhang, L.; Pan, X.; Yu, J. A Decentralized Power Allocation Strategy for Dynamically Forming Multiple Hybrid Energy Storage Systems Aided with Power Buffer. IEEE Trans. Sustain. Energy 2023, 14, 1714–1724. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controllers | Advantages | Limitations | Overshoot/ Undershoot | Statistical Errors | Considering Uncertainty |
|---|---|---|---|---|---|
| FLC-gain scheduling [12,13] |
|
| 5% | ✕ | ✕ |
| Droop control-PI [18,19,20] |
|
| 1.9% | ✕ | ✕ |
| PI-PI [13,24,25,26] |
|
| 3.5% | ✕ | ✕ |
| MPC [13,28,29,30] |
|
| 1% | ✕ | ✓ |
| PI-SMC [35,36] |
|
| 3.8% | ✕ | ✓ |
| DC bus voltage | 48 V |
| PV array parameters | Values |
| Maximum power () | 200 W |
| Maximum output voltage () | 26.3 V |
| Maximum output current () | 7.61 A |
| Open-circuit voltage () | 32.9 V |
| Short-circuit current () | 8.21 A |
| Battery specifications | Values |
| Type | Lead Acid |
| Terminal voltage () | 24 V |
| Ah capacity | 17 Ah |
| Rated energy | 408 Wh |
| Supercapacitor specifications | Values |
| Terminal voltage () | 32 V |
| Capacitance | 58 F |
| Rated energy | 4.2 Wh |
| Boost converter parameters | Values |
| Capacitor () | 440 µF, 6 mF |
| Converter inductor () | 2 mF |
| Switching frequency | 50 kHz |
| HESS parameters | Values |
| Capacitor () | 10 µF |
| Inductor () | 6.3 mH, 1.3 mH |
| Switching frequency | 50 kHz |
| Controller parameters | Values |
| PV parameters (, , ) | 0.16, 0.01, 0.1 |
| HESS parameters (, , ) | 1.6, 1.2, 0.1, 1.7, 1.2 |
| Constant gain ( | 100 |
| 15 Ω ≡ 153.6 W @ 48 V | 21 Ω ≡ 109.71 W @ 48 V | 100 Ω ≡ 23.04 W @ 48 V | |||
| Rise time | Settling time | Rise time | Settling time | Rise time | Settling time |
| 1.1 ms | 28.5 ms | 0.8 ms | 28.9 ms | 0.6 ms | 46.4 ms |
| Controller | Rise Time | Settling Time | Overshoot/Undershoot 0–1 s; 8–9 s; 16–17 s | IAE | ITAE |
|---|---|---|---|---|---|
| PI-SMC | 26.7 ms | 527 ms | 4.9%; 1.6%; 1.6% | 3.4 | 13.7 |
| PI-FNITSMC | 25.2 ms | 65 ms | 0.1%; 1.3%; 1.3% | 2.0 | 8.1 |
| Controller | Rise Time | Settling Time | Overshoot/Undershoot 0–1 s; 8–9 s; 16–17 s | IAE | ITAE |
|---|---|---|---|---|---|
| PI-SMC | 27.3 ms | 521 ms | 4.6%; 3.3%; 3.1% | 4.1 | 22.4 |
| PI-FNITSMC | 25.2 ms | 65 ms | 0.06%; 2.5%; 2.4% | 2.5 | 13.8 |
| Controller | Rise Time | Settling Time | Overshoot/Undershoot 0–1 s; 8–9 s; 16–17 s | IAE | ITAE |
|---|---|---|---|---|---|
| PI-SMC | 32.1 ms | 591 ms | 3.1%; 3.3%; 3.2% | 4.6 | 27.3 |
| PI-FNITSMC | 25.2 ms | 88.2 ms | 0.3%; 2.6%; 2.4% | 2.8 | 14.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uswarman, R.; Munawar, K.; Ramli, M.A.M.; Mehedi, I.M. Bus Voltage Stabilization of a Sustainable Photovoltaic-Fed DC Microgrid with Hybrid Energy Storage Systems. Sustainability 2024, 16, 2307. https://doi.org/10.3390/su16062307
Uswarman R, Munawar K, Ramli MAM, Mehedi IM. Bus Voltage Stabilization of a Sustainable Photovoltaic-Fed DC Microgrid with Hybrid Energy Storage Systems. Sustainability. 2024; 16(6):2307. https://doi.org/10.3390/su16062307
Chicago/Turabian StyleUswarman, Rudi, Khalid Munawar, Makbul A. M. Ramli, and Ibrahim M. Mehedi. 2024. "Bus Voltage Stabilization of a Sustainable Photovoltaic-Fed DC Microgrid with Hybrid Energy Storage Systems" Sustainability 16, no. 6: 2307. https://doi.org/10.3390/su16062307
APA StyleUswarman, R., Munawar, K., Ramli, M. A. M., & Mehedi, I. M. (2024). Bus Voltage Stabilization of a Sustainable Photovoltaic-Fed DC Microgrid with Hybrid Energy Storage Systems. Sustainability, 16(6), 2307. https://doi.org/10.3390/su16062307