Abstract
Nowadays, the internet of electric vehicles (IoEV) has opened many new opportunities for various applications such as charging station selection, charging/discharging management, as well as supporting various end-user services. In Chile, the current deployment of charging station networks is still at an early stage and such stations do not support the required local and global communication and monitoring capabilities that allow the integration of such services. The underlaying communication infrastructures will play an important role in supporting different applications, such as grid-to-vehicle, vehicle-to-grid, and vehicle-to-vehicle services. This work developed an IoEV architecture for real-time monitoring of charging station networks, which consists of three layers: the physical layer, the communication network layer, and the virtual layer. In order to support reliable IoEV communications, different requirements for data rate, reliability, latency, and security are needed. We developed a communication network model for charging stations based on the IEC 61850-90-8 standard. The performance of the developed architecture has been evaluated considering different real scenarios including a standalone charging station, a group of charging stations in a university campus parking lot, and charging stations in a city. The performance of the communication network has been evaluated with respect to end-to-end latency.
1. Introduction
Nowadays, electric vehicles have become a primary element in the smart city ecosystem, contributing to reducing greenhouse gas emissions and pollution [1]. In this direction, many manufacturers are offering different models of electric vehicles, and over the next few years, more electric vehicle models will be available in the market. With the grid integration of many electric vehicles, managing and controlling the energy demand of electric vehicles will become more challenging due to vehicle operation modes that adapt a bidirectional energy flow among the electric vehicles and the electric power grid. Among the long-term solutions to overcome the high electric vehicles energy demand is to upgrade the current electric power infrastructure (transformers, power lines, etc.), which will require a potential cost and investments. Other solutions, such as scheduling techniques and intelligent control, will play an essential role in solving such high energy demand of electric vehicles in the near term without infrastructure upgrading [2]. Most of these solutions and techniques will require appropriate communication architectures that enable communication among charging stations, electric vehicles, energy management systems, and the electric power grid.
For the deployment of electric vehicles, many countries have set ambitious plans supported by policies and regulations. In Chile, the national electromobility strategy aims to achieve 100% of public transport vehicles and 40% of private vehicles to be electric by 2050 [3]. According to the ministry of energy, as of July 2021, in Chile, there were a total of 2164 electric vehicles, including vehicles, trucks, hybrid vehicles, and electric urban buses [4]. Furthermore, the number of electric bus fleets was approximately 841, which was the largest in the world after China.
Internet of electric vehicle (IoEV) can be defined as a wide network of electric vehicles, charging stations, sensors, and humans. Such IoEV networks aim to collect and disseminate information related to the electric vehicles and the environment, with the aim to support different vehicle-to-grid (V2G) services, improving driving experience, enhancing road safety, and avoiding accidents [5]. Currently, the public transportation system supports different types of electric vehicles such as private electric vehicles, electric taxis, and electric buses. The charging patterns of buses, electric taxis, and private electric vehicles are very different. A private car can be charged at home or the parking lot while the vehicle may spend the day parking. Instead, an electric taxi needs to serve many customers; therefore, electric taxis cannot be stopped for a long time in charging stations because the mobility is related to their business. These challenges could be solved by remote monitoring and scheduling to meet the required load profile preventing the grid overloading [6].
To mitigate the impact of the grid integration of electric vehicles in a smart way, we need to monitor the state of charge of the electric vehicles’ batteries and the locations of the electric vehicles, to anticipate when and where it will need to be charged. To accomplish electric vehicle monitoring, it is necessary to have sensors on the vehicle to measure state of charge (SoC), and the location using a global position system (GPS) [7]. In most cases, these parameters are measured locally on electric vehicles because they are essential for the driver to decide when and where to charge. Therefore, the main challenge is the connectivity problem to exchange such information among different entities while vehicles are on the move.
For parking vehicles, communication between electric vehicles and charging stations (e.g., arrival time, current SoC, departure time, and required SoC) is important to decide the charging rate and the charging time. For on-the-move vehicles, communications enable the exchange of information with remote side units (RSUs) [8]. The information exchanged with RSUs is small, so low-power long-range (LoRa) technology is a promising candidate for this purpose [9]. With LoRa technology, a small number of gateways can support electric vehicles communication over a wide coverage area.
In general, there are different types of chargers, depending on the amount of energy they deliver. The chargers are ranked from level 1 (less energy) to level 3 (more energy). A level 1 charger is connected to low-voltage single-phase AC supplies, level 2 is connected to 1-phase/3-phase low-voltage systems, while level 3 is connected to 3-phase AC power systems. Based on battery capacity, the vehicle will need approximately 11–36 h or 2–3 h for level 1 and level 2, respectively, and approximately 12–30 min with level 3 [10]. This indicates that the waiting time for EV charging cannot be compared with conventional gasoline-based refueling.
Considering the challenges for private electric vehicles such as short driving range, slow charging rate for home charging stations, and the lack of the availability of fast charging stations, many parking lots are now supporting parking and charging services for electric vehicles. To support charging/discharging services, reliable communications are needed among electric vehicles, parking lot local controller (PLLC) and the power grid [11].
The current state of the art regarding the underlying communication infrastructure for supporting electric vehicles and charging stations is still underexplored [12,13,14,15,16,17,18,19,20]. In this direction, the IEC 61850 standard will help to standardize the data exchanged between different entities in order to facilitate the grid integration of electric vehicles [21,22,23]. Most of the current charging stations are decentralized with complex structures which make real-time monitoring and management a difficult process. Real-time information on the status of charging stations such as availability and reservations will provide critical and valuable information for the end user and the service provider [24,25,26,27,28,29,30]. In this regard, information and communication technologies (ICT) are a key element to enhance the capabilities of electric vehicles and charging stations through data collection, storage, and analysis.
IoEV architectures will play an important role in supporting the grid integration of electric vehicles and enhancing the grid stability using IoT connectivity and cloud-based services [2,5,17,24,30]. IoT sensors and communication modules will enable real-time data exchange and control among electric vehicle subsystems [1,9,13,15,17,20,25,27,29,30]. Also, they will support smart electric vehicle charging and bidirectional energy flow between electric vehicles and charging stations. Using cloud-based services and data analytics for decision making will allow real-time data exchange on energy usage and enable better integration of renewable energy sources. Furthermore, they will reduce the peak load stress on the power grid, improve energy utilization, and balance between supply and demand. In such integrations, the IEC 61850-90-8 standard will provide a framework for seamless communication and interoperability among electric vehicles, charging stations, and power grid [21,22,23]. The IEC 61850-90-8 standard will ensure real-time data exchange and communication among different devices and systems and secure safety and interoperability. In this work, the IoEV and IEC 61850-90-8 standards are essential elements to ensure interoperability and seamless integration of electric vehicles and charging stations in the distribution power system. The main contributions of this work are given below:
- Develop an IoEV architecture for the grid integration of electric vehicles in the distribution power system. The developed architecture consists of three layers: the physical layer, the communication network layer, and the virtual layer.
- Develop a communication network model for charging stations based on the IEC 61850-90-8 standard.
- Evaluate the capability of the developed communication network for different real scenarios including a standalone charging station, charging stations in a university campus parking lot, and charging stations in Vina del Mar City, Chile.
2. Related Work
The grid integration of electric vehicles presents many challenges from communication and power perspectives. On the one hand, the challenges of electric power include, for example, grid stability, voltage fluctuation, frequency deviation, harmonics, and power outage [12]. On the other hand, wireless connectivity for vehicles will play an important role in enabling communications with the internal/external environment. Existing technologies include, for example, ZigBee, Bluetooth, passive RFID, 60 GHz Millimeter-Wave (mmWave), and Ultra-Wideband [13].
2.1. Electric Vehicles
With respect to electric vehicles, an IoT perspective was developed in [1] for charging station recommendation and real-time electric vehicles load forecasting. With real-time information, many benefits can be achieved, such as avoiding the long waiting time at charging stations and reducing costs of energy and charging time. The communication challenges include reliability, delay, interruptions, and standardization. In Ref. [2], the authors provided a survey on standards, communication requirements, and technology candidates toward the IoEV. Furthermore, the work addressed the critical challenges associated with grid integration of electric vehicles and the role of information and communication technologies in the solution.
An extensive review about topologies of battery charger and levels of charging power for electric vehicles was presented in Ref. [10], where the authors discussed the high energy demand and consumption of electric vehicles. In Ref. [6], a grid stability technique was proposed to schedule the charging time of electric taxis and private cars to reduce the load profile. In Ref. [7], an energy management strategy was simulated to save energy using multiple frequent routes, driver’s behavior, and GPS for PHEVs.
2.2. Communication Networks
With the advances in vehicular networks, dedicated short-range communication (DSRC) and 4G will not be capable of supporting the high volume of data generated from different sensors such as LIDAR, cameras, and Radar. Therefore, mmWave communication was considered as a promising technology to support the high data rate required for different vehicular applications such as remote driving, vehicle platooning, and automated driving [14]. Other research work considered LoRa wireless technology as a promising candidate to support different V2X applications such as vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), vehicle-to-network (V2N) and vehicle-to-pedestrian (V2P) [15].
In Ref. [11], an OPNET simulation model of the communication network conditions to monitor charging stations in a parking lot based on the IEC 61850 standard was presented. In Ref. [5], the authors presented an overview for the security issues of the IoEV architecture as data exchange might be subject to many types of attacks such as DoS, false data injections, eavesdropping, modification, and spoofing. The work presented different V2X communication such as V2V, vehicle-to-road infrastructure, vehicle-to-internet, and vehicle-to-human services. A comprehensive survey on 5G-V2X use cases and enabling technologies shows the need for high-bandwidth communication for some applications [8]. In this case, they focused on high demanding data rate cases of uses over wireless communication between vehicles to everything (V2X). The authors of [9] studied LoRa in an urban environment using simulations and real measurements. The parameters of interest were packet delivery ratio, packet inter-reception time, and received signal strength indicator. Simulation results, provided by the NS3 simulator, were compared to the real measurements at a university campus.
2.3. Charging Stations
There are different modes and power levels for charging electric vehicles through electric vehicle supply equipment (EVSE) [2,12,29]. In general, the different levels are named level 1, level 2, level 3, and level 4. Level 1 can draw approximately 1.4–1.9 kW power. This mode will enable EV to take an average of 8–12 h to reach the full state of charge for the battery. The main advantage of level 1 is the economic cost which does not require any additional infrastructure at homes. However, no communication nor control is supported when connected to the grid. In the residential charging system, the system does not support monitoring nor control due to the simple charging system at low voltage. Compared with level 1, level 2 charging usually takes 4–8 h, which is very suitable for residential buildings. Level 3 is considered as a fast-charging option that can be used in malls, highways, and public places which will support very quick charging. Level 4 is a DC charging (400–800 V DC) for heavy vehicles which is not suitable for residential places.
In Ref. [29], the authors presented a review on charging infrastructure, charging technologies, and charging station recommendations. The work highlighted the need for a reliable communication network among electric vehicle system participants and IoT-enabled CSs. Ref. [30] presented a review on quality-of-service parameters for electric vehicles including scalability, resource allocation, energy demand, and capacity planning. Also, the work discussed EV communication infrastructure and technologies. Such vehicular communication (WAVE, DSRC, 4G/LTE, 5G, and VANET) is related to electric vehicle mobility and ITS to increase safety and reduce traffic congestion and collisions. Table 1 provides a comparison among related work.

Table 1.
Comparison among related work. CS: charging station; EV: electric vehicle; ET: electric taxi.; PL: parking lot; IoV: internet of vehicle; IoEV: internet of electric vehicle, V2X: vehicle to everything; DT: digital twin; CPS: cyber–physical system.
The authors of [31] presented a new strategy to minimize the charging cost of EVs based on the day-ahead electricity price and the battery degradation cost, considering the limitations of EVs SOC and the maximum power of the charger. The new methodology was applied to coordinate the charging of EVs in low-voltage networks. In Ref. [32], the authors developed a dynamic pricing model to manage PEV charging at charging stations, avoiding overlap with residential peak hours. Formulated as an optimization problem, the model employed a heuristic solution to adjust prices and direct demand. The results indicated improvements in reducing load during peak hours and waiting times, promoting network stability. In Ref. [33], the work explored the impact of ultra-fast charging stations on the distribution network and their integration into smart grids. Also, the communications necessary for the efficient operation of the ultra-fast charging stations, evaluating the reliability and use of data in the management of these stations. In Ref. [34], the work presented a methodology to use the collective storage capacity of slow-charging electric vehicles in parking lots as a resource for regulating services and as a buffer for fast-charging fluctuations.
While most of the research work highlighted the importance of communication networks for electric vehicles and charging stations [29,30,31,32,33,34], the performance of communication network and the underlying communication infrastructures have been less defined and discussed. It is believed that communication networks will play an important role in electric vehicle coordination. There is a need to develop an IoEV architecture for real-time monitoring of electric vehicles and charging stations for numerous applications. Among these applications, charging scheduling (when electric vehicles should be charging/discharging at home/work/charging stations) while electric vehicles are parking, and charging station selection (where electric vehicles should be charged) while electric vehicles are on the move.
In Chile, the current charging stations lack information about the real-time status of charging points, availability of charging stations, and charging costs, which will impact the adoption of current electromobility plan. To the best of our knowledge, this is the first study for the performance evaluation of communication network for electric vehicle charging stations in Valparaiso region, Chile. The main contributions are: (a) develop an IoEV architecture to support the integration of electric vehicles in the distribution power system. The developed architecture consists of three layers: the physical layer, the communication network layer, and the virtual layer. (b) Develop communication network model for monitoring the electric vehicle charging stations based on the IEC 61850-90-8 standard. (c) Evaluate the capability of communication network for different real scenarios including a standalone charging station, charging stations in a parking lot of a university campus, and charging stations in Vina del Mar City, Chile.
3. IoEV Architecture Model for the Electric Vehicle System
There are different architectures and models available for smart grid and IoT [25,26,27,28]. The basic architecture model of IoT system is three layered: a perception layer, a network layer, and n application layer. Other architectures add more abstractions and extend the three-layer model to five-layer architecture, as shown in Figure 1. Such architectures have not yet converged into common architecture [26].
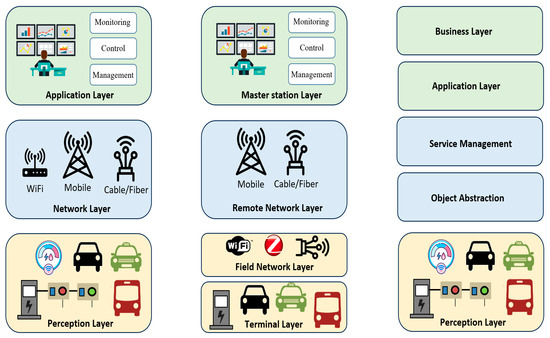
Figure 1.
IoT-based architecture for the electric vehicle system.
The perception layer (also known as objects layer or terminal layer) consists of various types of IoT-sensing devices and actuators for information acquisition, monitoring and control. The network layer aims to enable mapping and transmitting the data collected from the perception layer to the application layer through various technologies such as ZigBee, WiFi, and 4G/5G. The network layer is a very important layer in IoT architecture because various communication technologies and network devices are integrated in this layer. The received information at the application layer is processed in order to support different applications.
A four layered architecture consists of a terminal layer, a field network layer, a remote network layer, and a master station layer. Compared with the three-layered architecture, the terminal layer and field network layer represent the perception layer. The remote network layer represents the network layer, and the master station layer represents the application layer. A five layered architecture consists of perception layer, object abstraction layer, service management layer, application layer, and business layer. The service management layer represents the role of the middleware layer which enables the support of different vertical services and applications. In this work, we considered the three-layer architecture because of its simplicity, and it is easy to apply [27].
3.1. Developed IoEV Architecture
In this work, we defined the main entities of the electric vehicle system based on the smart grid architecture model (SGAM) [16]. The SGAM considers five layers: component, communication, information, function, and business layers. The component layer includes devices, equipment, communication infrastructure, and servers. The communication layer provides protocols and mechanisms for information exchange among different components. The information layer deals with data models and information objects. The function layer represents functions and services. The business layer describes the business aspects related to information exchange. The developed architecture consists of different domains (power grid, energy transfer from/to electric vehicles, electric vehicles, and users) and zones (enterprise, operation, station, field, and process), as shown in Figure 2.
- Power grid: This contains the electricity system and the local power generation which supports charging stations.
- Energy Transfer from/to Electric Vehicles: This includes charging station infrastructures and management systems for different services such as vehicle-to-home (V2H), V2G, and V2V services.
- Electric Vehicle: This includes different entities such as electric vehicles, electric buses, electric scooters, and electric bikes as well as the monitoring and management systems.
- Electric Vehicle User: This includes the end users’ interfaces such as personal computers and mobile devices, as well as other services such as searching, reserving, booking, navigation, and route planning for CS or electric vehicle.
- Process: This includes the physical equipment. Such entities include, for example, the electric power grid, charging stations, electric vehicles, and end-user devices.
- Field: This includes the main equipment used for real-time monitoring, protection, and control of the power grid, charging station, and electric vehicles.
- Station: This includes data aggregation for an area or zone such as a charging spot with many charging stations or internal communication of an electric vehicle.
- Operation: This includes the management system for the processing of data aggregated from electric vehicles or CSs.
- Enterprise: This includes services for organizations and enterprises such as service providers and utilities.
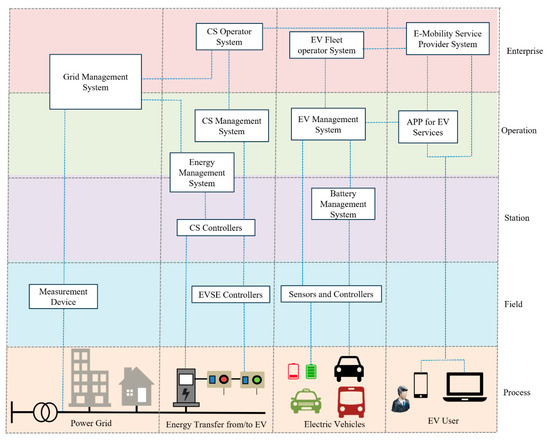
Figure 2.
General architecture for electromobility based on smart grid architecture model.
With the direction toward the future digital twin for electromobility, the presence of a communication network is a key element for the difference among digital model (mimics physical object/system with no communication or data exchange), digital shadow (one-way communication from physical model to digital model), and digital twin (two-way communication from physical model to digital model) [17,18,19,20]. In the electromobility domain, the advances made in IoT, AI, and big data will enable digital twin concept to provide real-time data and services for end user and service provider.
We developed an architecture model for the electric vehicle system which consists of three layers: the physical layer, communication network layer, and the virtual layer, as shown in Figure 3. The main entities are the physical entities of the physical layer, the digital models in the virtual layer, the communication network connection between the physical and virtual layers, the big data created, and services.
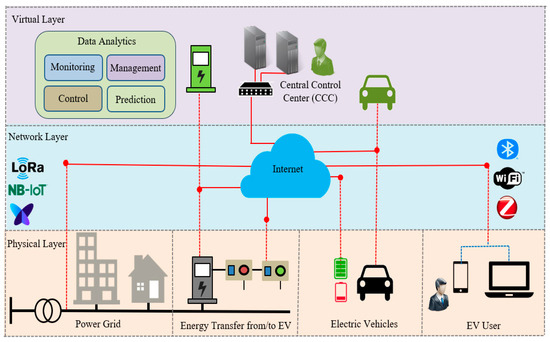
Figure 3.
Developed IoEV architecture model for the electric vehicle system.
The physical layer consists of electric vehicles, charging stations, and other facilities. Sensor nodes and measuring devices are used to connect different entities in the physical layer to the network layer which transmit data such as traffic condition, vehicle speed and position, and status of charging stations. The network layer enables the communication and interaction between the physical layer and the virtual layer using different short-range and long-range communication technologies. At the virtual layer, different servers for data storage and decision-making tasks are used to support different services to the end user and the service provider. Both real-time data and historical data are used to develop energy efficiency solutions, smart charging algorithms, etc.
3.2. Data Model for Monitoring Charging Stations Based on the IEC 61850-90-8 Standard
The IEC 61850 standard has been used for modeling different smart grid components. In this work, based on the IEC 61850-90-8 standard (object model for e-mobility), we defined the logical nodes for the electric vehicle system [21,22,23]. The logical nodes contain the information related to monitoring and controlling the electric vehicle (EV) and electric vehicle supply equipment (EVSE), as shown in Table 2 and Table 3. In order to coordinate the communication between electric vehicle and charging station, the electric vehicle is equipped with electric vehicle communication controller (EVCC) while charging station is equipped with supply equipment communication controller (SECC) at the station side, as shown in Figure 4. The e-mobility operator is the legal entity which maintains and operates the charging stations.
Table 2.
Logical node of EV based on the IEC 61850-90-8 standard.
Table 3.
Logical node of EVSE based on the IEC 61850-90-8 standard.
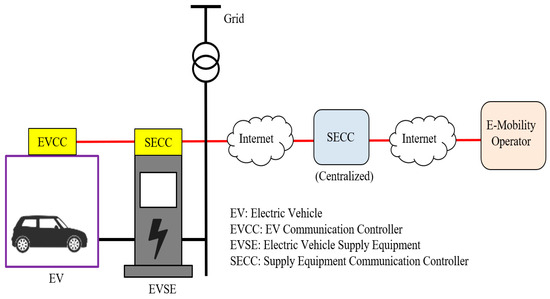
Figure 4.
Schematic diagram for communication architecture for EVCS based on the IEC 61850-90-8 standard.
In general, there are different types of data transmission from EVCSs: random data and cyclic data. Examples of random data are alarm information and control commands while cyclic data are continuous and generated according to certain time intervals. Figure 5 shows the communication architecture for EVCS based on the IEC 61850-90-8 standard. It consists of two parts: a real-time monitoring for information such as voltage and current, while the second part is related to protection and control information from various intelligent electronic devices (IEDs) including merging unit (MU), circuit breaker (CB) and protection and control (P&C).
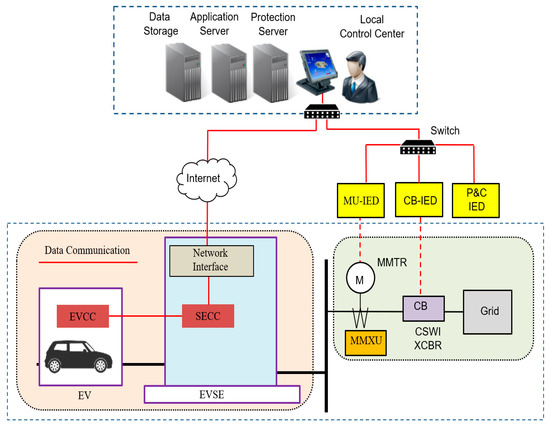
Figure 5.
Communication network and information model for EVCS.
3.3. Communication Requirements for IoEV
IoEV is based on a communication network in order to support real-time monitoring and control of electric vehicles and EVCSs. The communication standard and technologies could be divided into two categories: the first is related to home/building charging while the second is related to mobile electric vehicle charging. In general, the charging stations are connected to an energy management unit (EMU) in a home/building/city through a communication network. Such communication is needed before charging (identification and authorization), during charging (charging parameters and battery information), and after charging (measurement and billing information). Based on the target application, there are different communication requirements such as latency, bandwidth, reliability, and security for end users (e.g., electric vehicle user, the aggregator, the utility).
Among the most popular technologies for home/building are ZigBee, WiFi, and Ethernet. Note that, the communication requirement between electric vehicle and charging station is in milliseconds, while communication between charging station and energy management unit is in the order of seconds [2,24]. Table 4 shows different standards and communication technologies for IoEV.
Table 4.
Communication standard for different levels of IoEV.
4. Results
4.1. Network Modeling and Simulation Results
In this work, a network simulation tool (OPNET Modeler, version 14.5) is used to evaluate the performance of the communication network for charging stations under different architectures and configurations. The communication network is configured for a charging station connected to a local control center (LCC), and for a group of charging stations connected to a centralized control center (CCC), as given in Table 5. Such communication network configurations could be through a public or a private communication network. Based on the coverage area and the scale size, different scenarios are considered including a standalone charging station, charging stations in a university campus parking lot, and charging stations in Vina del Mar City, Chile.
Table 5.
Parameters and configurations for different scenarios.
For a standalone charging station, the scenario considers a single charging station connected to a local controller through a local area network, as shown in Figure 6. For the scenario of charging stations in a parking lot, we assume a future scenario where charging stations are installed in a parking lot to support electric vehicles charging. The campus includes different parking lots in different zones. Each zone has a different layout, dimension, and the number of spots. Table 6 shows the data type and message exchange between the electric vehicle charging station (EVCS) and the local controller.
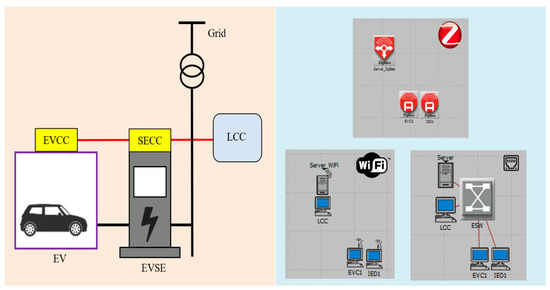
Figure 6.
Communication network model for a standalone charging station using ZigBee, WiFi, and Ethernet.
Table 6.
Message exchange for EVCS.
To evaluate the network capacity and scalability, we selected the parking lot (A) at UTFSM campus, Valparaiso, Chile. The parking lot is located near Building (C) and is near the gate entrance which could support offering the charging service to university vehicles as well as other vehicles in the neighborhood. The parking lot dimensions are approximately 50 m × 15 m with a maximum capacity of approximately 40 parking spots. We considered a local control center (LCC) responsible for real-time monitoring of electric vehicles and charging stations. The LCC could also support real-time monitoring of other parking lots inside the campus, as shown in Figure 7.
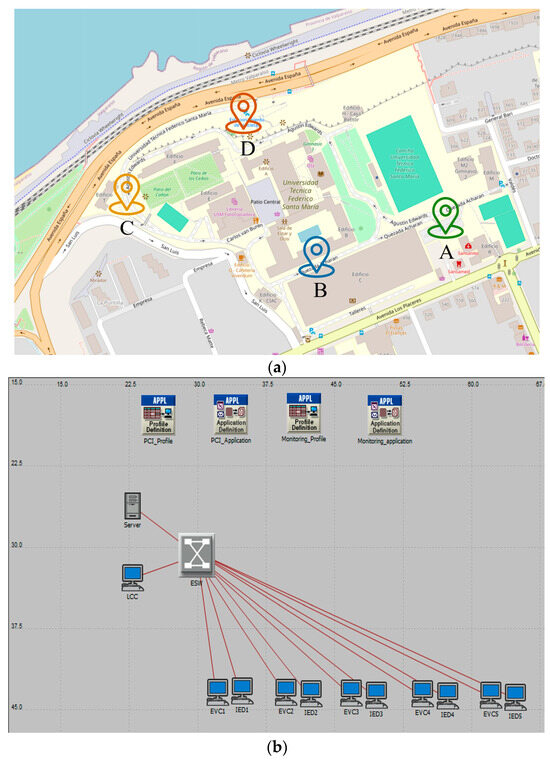
Figure 7.
(a) Locations of charging stations in parking lots (A–D) at UTFSM campus, Valparaiso, Chile; (b) the simulation model of communication network.
In OPNET, the network topology consists of devices and links. Examples of devices are switches, routers, and servers, while the links represent the physical/logical connection between devices such as Ethernet cables and wireless links. For data transmission, we considered file transfer protocol (FTP) as an application protocol between source and destination. For the traffic model, we considered the application traffic related to monitoring and protection information from charging stations. To simulate different scenarios, we created different network topologies and configured the traffic model for network devices and protocols. The communication delay represents various factors including propagation delay, transmission delay, processing delay and queuing delay. In this work, the traffic model has been simulated under a normal operation and the simulation results are analyzed.
The traffic information for monitoring data and IEDs data have been configured in the simulation using profile definition and application definition. The traffic is generated every second from the charging stations and the IEDs and the destination is configured for the server of the local controller. For the standalone scenario, three commonly used communication technologies are simulated using Ethernet, ZigBee, and WiFi.
The ZigBee-based architecture, based on the IEEE 802.15.4 standard, supports a data rate of 250 kbps which is suited for applications with a short-range low-data transmission. For a standalone charging station, the results show that the total data received successfully by the ZigBee coordinator is 78,288 bytes/s and the average end-to-end delay is 0.158 s. For Ethernet-based and WiFi-based architectures, Table 7 and Table 8 show the results for a standalone charging station. We consider different Ethernet channel capacities (10 Mbps, 100 Mbps, 1 Gbps) and different WiFi data rates (11 Mbps, 24 Mbps, 54 Mbps).
Table 7.
Ethernet end-to-end delay for a standalone charging station.
Table 8.
WiFi average end-to-end delay for a standalone charging station.
For the Ethernet-based architecture, the wired network configuration is simple and inexpensive. However, one of the drawbacks of Ethernet is the difficulty for changing the network topology after the network is placed. Therefore, we considered WiFi-based architecture, which is flexible and supports a high data rate compared with ZigBee-based architecture. Also, WiFi network is available in the university campus.
The results for Ethernet-based architecture are given in Table 7. The end-to-end delay of all packets received by all the stations is approximately 2.331 ms, 0.233 ms, and 0.024 ms for channel capacity of 10 Mbps, 100 Mbps, and 1 Gbps, respectively. The results for WiFi-based architecture are given in Table 8. The average end-to-end delay is approximately 1.921 ms, 0.924 ms, and 0.601 ms, for a data rate of 11 Mbps, 24 Mbps, and 54 Mbp, respectively.
For the parking lot scenario, we considered Ethernet-based architecture for a network of 5 and 10 charging stations. Data from EVSEs and IEDs are transmitted to the LCC. Table 9 shows the end-to-end delay for the parking lot. With 10 charging stations, the end-to-end delay of Fast Ethernet and Gigabit Ethernet is approximately 2.309 ms and 0.227 ms, respectively.
Table 9.
Ethernet end-to-end delay for a parking lot.
We also considered the scenario of Vina del Mar City, Chile. There are different charging stations which are geographically distributed in the city. The developed communication model considers that each charging station is connected to a local control center (LCC) through a local area network (LAN) and the LCC is connected to a centralized local control center (CCC) via a router device. We developed the communication network model based on the available information, on Google Maps, for the number and the locations of electric charging stations, as shown in Table 10. Figure 8 shows the map of Vina del Mar City, Chile, while Table 9 shows the name, location, and specifications of each charging station. Only seven stations were considered because they have complete information while other stations have been discarded.
Table 10.
List of charging stations in Vina del Mar city.
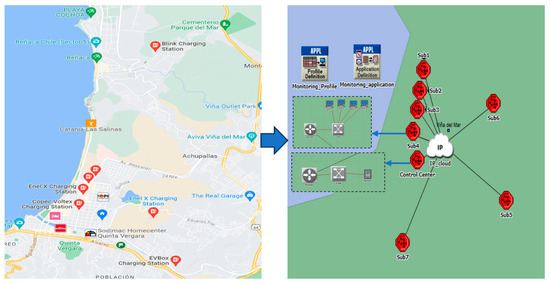
Figure 8.
Google map with location of charging stations in Vina del Mar City, Chile, and the simulation model of communication network.
We developed a communication network model consisting of eight subnetworks (7 representing charging stations) and one representing the control center. Each charging station subnetwork comprises a group of workstations, an Ethernet switch, and a router. Each charging station is configured to transmit the status of the charging spot and the charging status of electric vehicles to the local/remote control center. Such information could be used to schedule the charging and/or energy management. The communication links inside the LAN subnetwork have been configured with Fast Ethernet (100 Mbps). The connection to the internet has been configured through IP Cloud. The communication links were configured with PPP-DS1 (1.544 Mbps) and PPP-DS3 (44.736 Mbps). Table 11 shows the IP end-to-end delays between charging stations and the central control center. The delay results for PPP-DS3 are approximately 0.6 ms. Station 1 and Station 7 show a higher delay of approximately 10 ms using PPP-DS1.
Table 11.
End-to-end delay between charging stations and the central control center.
4.2. Prototype Implementation Results
To validate the developed architecture, we designed and implemented a low-cost IoEV platform (hardware and software) using SONOFF devices which support WiFi connectivity, as shown in Figure 9. WiFi technology has been selected as the university campus has a 100% coverage with WiFi networks. The firmware of SONOFF devices has been updated to support data transmission between SONOFF nodes and the server using MQTT protocol. The following services are supported in the current prototype:
- Real-time monitoring: the information received from SONOFF devices provides access to real-time information such as voltage, current, and power.
- Status information: the platform provides the status information on charging stations including on/off status.
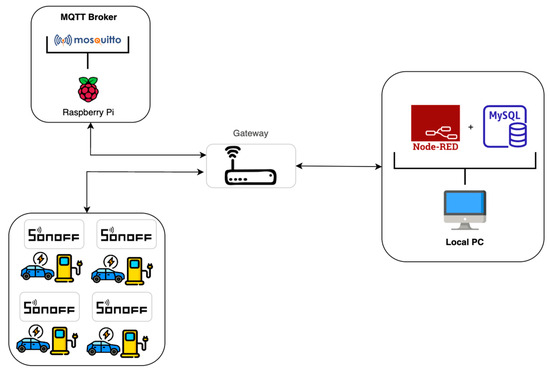
Figure 9.
Testbed implementation of IoEV platform to validate the developed architecture.
The developed testbed, shown in Figure 9, consists of an edge-based middleware system, utilizing a Raspberry Pi Model B as the MQTT broker, paired with a local PC for data processing. The Raspberry Pi runs Eclipse Mosquitto (https://mosquitto.org/, accessed on 3 July 2024), enabling the communication between the SONOFF devices and the PC. On the PC, we created a Node-RED dashboard for real-time monitoring of the charging stations, complemented by a MySQL local database for storing the historical data. Figure 10 shows the platform’s main dashboard showing the location of the charging stations and four bottoms to access their consumption information. By clicking on each of the charging stations, we monitor in real-time the power, current, energy, and voltage, as shown in Figure 11. Data from charging stations were emulated by using appliances with similar on/off behavior.
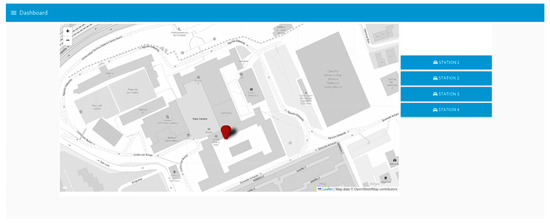
Figure 10.
Platform’s main dashboard.

Figure 11.
Station 3 view shows information on status, power, energy, current, and voltage.
Using a Raspberry Pi as an MQTT broker and a PC for data processing provide significant advantages for monitoring charging stations. This setup allows real-time data processing, enabling immediate insights and alerts for charging status and performance. Furthermore, it offers scalability, allowing easy expansion to accommodate multiple stations. The local processing reduces latency and ensures reliable operation independent of external networks. Custom dashboards via Node-RED and historical data storage in MySQL enable future tailored data analysis, predictive maintenance, and optimized usage. The system’s low-cost and modular infrastructure supports effective control and automation, making it a cost-effective and adaptable solution for charging station management.
Our system achieves communication performance through minimal latency, measured at approximately 49.3 ms average, and demonstrates a data throughput of approximately 0.0347 Kbps based on the provided MQTT message sizes. However, this very low throughput is likely due to the small size of individual MQTT messages and the relatively long-time intervals between them in the logs obtained. For a fair comparison with previous approaches, we need to analyze a larger set of data transmissions over a more extended period, considering factors like network stability and potential variations in message sizes. The developed architecture provides a local processing capability, coupled with reduced operational costs and easy scalability. Our platform not only provides a complete validated system with a user-friendly interface for real-time monitoring but also delivers enhanced performance and economic viability for managing EV charging stations.
5. Conclusions
The design of a reliable communication infrastructure has a direct impact on the integration of electric vehicles and charging stations into the electric power grid. Such integration requires appropriate and efficient communication which is essential for supporting different applications and services. In this work, we developed an IoEV architecture for electric vehicle systems which consists of three layers: the physical layer, the communication network layer, and the virtual layer. We developed a communication network model for electric vehicle charging stations based on the IEC 61850-90-8 standard. The developed communication network has been modeled and simulated using mostly used communication technologies including ZigBee, WiFi, and Ethernet. Various future scenarios were considered including a standalone charging station, a group of charging station in parking lot, a group of charging station in a city.
Results show that wireless technologies such as ZigBee and WiFi can be used successfully for communication networks of a standalone charging station in home/building area network or a parking area network. Such wireless configurations could provide a low installation cost compared with Ethernet-based solutions. For a parking lot, Fast Ethernet and Gigabit Ethernet could be used to support a group charging station (10 charging stations) in a parking lot with an end-to-end delay of approximately 2.309 ms and 0.227 ms, respectively. This work contributes by providing an insight view into the performance of different communication technologies and their adequacy for the implementations of various future scenarios.
IoEV is a multilayer architecture with massive data generated from electric vehicle subsystems. Fog and edge computing will play an important role in enabling IoEV architecture to provide better quality of services and a faster response. Instead of sending the data to the centralized cloud infrastructure, IoT devices could process the data at the network edge which will result in improving the bandwidth and latency. In this work, we built a real testbed, in a laboratory environment, to validate the simulation results for real-time monitoring of charging stations. As a future work, we aim to develop a complete digital twin platform where charging stations and electric vehicles could interact between the physical domain and the virtual domain through the communication network. Such a platform will enable real-time monitoring and management of EV system, where the collected data from charging stations and electric vehicles could be utilized to generate value-added services.
Author Contributions
Conceptualization, M.A.A. and L.G.; methodology, M.A.A., L.G. and P.F.; software, M.A.A. and L.G.; validation, M.A.A., L.G. and P.F.; writing—original draft preparation, M.A.A. and L.G.; writing—review and editing, M.A.A., L.G. and P.F.; project administration, M.A.A.; funding acquisition, M.A.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Acknowledgments
This work was supported by the Agencia Nacional de Investigación y Desarrollo (ANID) through the Proyecto Fondecyt de Iniciación en Investigación 2020 under Project ID11200178 and the DGIIP-UTFSM Chile.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
| IoEV | internet of electric vehicles |
| V2G | vehicle-to-grid |
| GPS | global position system |
| SoC | state of charge |
| RSU | remote side units |
| LoRa | long-range |
| PLLC | parking lot local controller |
| ICT | information and communication technologies |
| mmWave | millimeter-wave |
| DSRC | dedicated short-range communication |
| V2V | vehicle-to-vehicle |
| V2I | vehicle-to-infrastructure |
| V2N | vehicle-to-network |
| V2P | vehicle-to-pedestrian |
| V2R | vehicle-to-road |
| V2X | vehicles to everything |
| V2H | vehicle-to-home |
| SGAM | smart grid architecture model |
| CS | charging station |
| PE | physical layer |
| VM | virtual layer |
| CN | communication connection |
| DD | big data |
| SS | services |
| EV | electric vehicle |
| EVSE | electric vehicle supply equipment |
| EVCC | electric vehicle communication controller |
| EVCC | supply equipment communication controller |
| MU | merging unit |
| CB | circuit breaker |
| P&C | protection and control |
| EMU | energy management unit |
| LCC | local control center |
| CCC | centralized control center |
| LAN | local area network |
References
- Savari, G.F.; Krishnasamy, V.; Sathik, J.; Ali, Z.M.; Abdel Aleem, S.H.E. Internet of Things based real-time electric vehicle load forecasting and charging station recommendation. ISA Trans. 2020, 97, 431–447. [Google Scholar] [CrossRef] [PubMed]
- Bayram, I.S.; Papapanagiotou, I. A survey on communication technologies and requirements for internet of electric vehicles. EURASIP J. Wirel. Commun. Netw. 2014, 2014, 223. [Google Scholar] [CrossRef]
- National Electromobility Strategy, Ministry of Energy. Available online: https://www.energia.gob.cl/sites/default/files/estrategia_electromovilidad-8dic-web.pdf (accessed on 1 March 2024).
- Electromobility: Chile Is Leading the Way in Latin America with Ambitious Goals, Innovation & Entrepreneurship, 7 September 2021. Available online: https://marcachile.cl/en/innovationentrepreneurship/international-day-of-clean-air-electromobility-takes-to-the-streets-of-santiago (accessed on 1 March 2024).
- Fraiji, Y.; Ben Azzouz, L.; Trojet, W.; Saidane, L.A. Cyber security issues of Internet of electric vehicles. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar]
- Shen, J.; Wang, L.; Zhang, J. Integrated Scheduling Strategy for Private Electric Vehicles and Electric Taxis. IEEE Trans. Ind. Inform. 2021, 17, 1637–1647. [Google Scholar] [CrossRef]
- Zeng, X.; Wang, J. Optimizing the Energy Management Strategy for Plug-In Hybrid Electric Vehicles With Multiple Frequent Routes. IEEE Trans. Control Syst. Technol. 2019, 27, 394–400. [Google Scholar] [CrossRef]
- Alalewi, A.; Dayoub, I.; Cherkaoui, S. On 5G-V2X Use Cases and Enabling Technologies: A Comprehensive Survey. IEEE Access 2021, 9, 107710–107737. [Google Scholar] [CrossRef]
- Ortiz, F.M.; de Almeida, T.T.; Ferreira, A.E.; Costa, L.H.M. Experimental vs. simulation analysis of LoRa for vehicular communications. Comput. Commun. 2020, 160, 299–310. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of Battery Charger Topologies, Charging Power Levels, and Infrastructure for Plug-In Electric and Hybrid Vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Ahmed, M.A.; El-Sharkawy, M.R.; Kim, Y.-C. Remote Monitoring of Electric Vehicle Charging Stations in Smart Campus Parking Lot. J. Mod. Power Syst. Clean Energy 2020, 8, 124–132. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Wu, D.; Gao, S. Opportunities and Challenges of Vehicle-to-Home, Vehicle-to-Vehicle, and Vehicle-to-Grid Technologies. Proc. IEEE 2013, 101, 2409–2427. [Google Scholar] [CrossRef]
- Lu, N.; Cheng, N.; Zhang, N.; Shen, X.; Mark, J.W. Connected Vehicles: Solutions and Challenges. IEEE Internet Things J. 2014, 1, 289–299. [Google Scholar] [CrossRef]
- Zrar Ghafoor, K.; Kong, L.; Zeadally, S.; Sadiq, A.S.; Epiphaniou, G.; Hammoudeh, M.; Bashir, A.K.; Mumtaz, S. Millimeter-Wave Communication for Internet of Vehicles: Status, Challenges, and Perspectives. IEEE Internet Things J. 2020, 7, 8525–8546. [Google Scholar] [CrossRef]
- Haque, K.F.; Abdelgawad, A.; Yanambaka, V.P.; Yelamarthi, K. LoRa Architecture for V2X Communication: An Experimental Evaluation with Vehicles on the Move. Sensors 2020, 20, 6876. [Google Scholar] [CrossRef]
- Kirpes, B.; Danner, P.; Basmadjian, R.; de Meer, H.; Becker, C. E-Mobility Systems Architecture: A model-based framework for managing complexity and interoperability. Energy Inform. 2019, 2, 15. [Google Scholar] [CrossRef]
- Ali, W.A.; Fanti, M.P.; Roccotelli, M.; Ranieri, L. A Review of Digital Twin Technology for Electric and Autonomous Vehicles. Appl. Sci. 2023, 13, 5871. [Google Scholar] [CrossRef]
- Schwarz, C.; Wang, Z. The Role of Digital Twins in Connected and Automated Vehicles. IEEE Intell. Transp. Syst. Mag. 2022, 14, 41–51. [Google Scholar] [CrossRef]
- Francisco, A.M.B.; Monteiro, J.; Cardoso, P.J.S. A Digital Twin of Charging Stations for Fleets of Electric Vehicles. IEEE Access 2023, 11, 125664–125683. [Google Scholar] [CrossRef]
- Tappeta, V.S.R.; Appasani, B.; Patnaik, S.; Ustun, T.S. A Review on Emerging Communication and Computational Technologies for Increased Use of Plug-In Electric Vehicles. Energies 2022, 15, 6580. [Google Scholar] [CrossRef]
- IEC 61850-90-8:2016; Communication Networks and Systems for Power Utility Automation-Part 90-8: Object Model for E-mobility, Edition 1.0. International Electrotechnical Commission: Geneva, Switzerland, 2016.
- Aftab, M.A.; Hussain, S.M.S.; Ali, I.; Ustun, T.S. IEC 61850-Based Communication Layer Modeling for Electric Vehicles: Electric Vehicle Charging and Discharging Processes Based on the International Electrotechnical Commission 61850 Standard and Its Extensions. IEEE Ind. Electron. Mag. 2020, 14, 4–14. [Google Scholar] [CrossRef]
- Ustun, T.S.; Hussain, S.M.S.; Syed, M.H.; Dambrauskas, P. IEC-61850-Based Communication for Integrated EV Management in Power Systems with Renewable Penetration. Energies 2021, 14, 2493. [Google Scholar] [CrossRef]
- ElGhanam, E.; Hassan, M.; Osman, A.; Ahmed, I. Review of Communication Technologies for Electric Vehicle Charging Management and Coordination. World Electr. Veh. J. 2021, 12, 92. [Google Scholar] [CrossRef]
- Saleem, Y.; Crespi, N.; Rehmani, M.H.; Copeland, R. Internet of Things-Aided Smart Grid: Technologies, Architectures, Applications, Prototypes, and Future Research Directions. IEEE Access 2019, 7, 62962–63003. [Google Scholar] [CrossRef]
- Al-Fuqaha, A.; Guizani, M.; Mohammadi, M.; Aledhari, M.; Ayyash, M. Internet of Things: A Survey on Enabling Technologies, Protocols, and Applications. IEEE Commun. Surv. Tutor. 2015, 17, 2347–2376. [Google Scholar] [CrossRef]
- Shakerighadi, B.; Anvari-Moghaddam, A.; Vasquez, J.; Guerrero, J. Internet of Things for Modern Energy Systems: State-of-the-Art, Challenges, and Open Issues. Energies 2018, 11, 1252. [Google Scholar] [CrossRef]
- Lin, J.; Yu, W.; Zhang, N.; Yang, X.; Zhang, H.; Zhao, W. A Survey on Internet of Things: Architecture, Enabling Technologies, Security and Privacy, and Applications. IEEE Internet Things J. 2017, 4, 1125–1142. [Google Scholar] [CrossRef]
- Savari, G.F.; Sathik, M.J.; Raman, L.A.; El-Shahat, A.; Hasanien, H.M.; Almakhles, D.; Abdel Aleem, S.H.E.; Omar, A.I. Assessment of charging technologies, infrastructure and charging station recommendation schemes of electric vehicles: A review. Ain Shams Eng. J. 2023, 14, 101938. [Google Scholar] [CrossRef]
- Ramraj, R.; Pashajavid, E.; Alahakoon, S.; Jayasinghe, S. Quality of Service and Associated Communication Infrastructure for Electric Vehicles. Energies 2023, 16, 7170. [Google Scholar] [CrossRef]
- Ayyadi, S.; Bilil, H.; Maaroufi, M. Optimal charging of Electric Vehicles in residential area. Sustain. Energy Grids Netw. 2019, 19, 100240. [Google Scholar] [CrossRef]
- Moghaddam, Z.; Ahmad, I.; Habibi, D.; Masoum, M.A.S. A Coordinated Dynamic Pricing Model for Electric Vehicle Charging Stations. IEEE Trans. Transp. Electrif. 2019, 5, 226–238. [Google Scholar] [CrossRef]
- Franzese, P.; Patel, D.D.; Mohamed, A.A.S.; Iannuzzi, D.; Fahimi, B.; Risso, M.; Miller, J.M. Fast DC Charging Infrastructures for Electric Vehicles: Overview of Technologies, Standards, and Challenges. IEEE Trans. Transp. Electrif. 2023, 9, 3780–3800. [Google Scholar] [CrossRef]
- Khalkhali, H.; Hosseinian, S.H. Multi-class EV charging and performance-based regulation service in a residential smart parking lot. Sustain. Energy Grids Netw. 2020, 22, 100354. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).