



Prediction Model of Car Ownership Based on Back Propagation Neural Network Optimized by Particle Swarm Optimization

Abstract
:1. Introduction
2. PSO-BP Neural Network Model
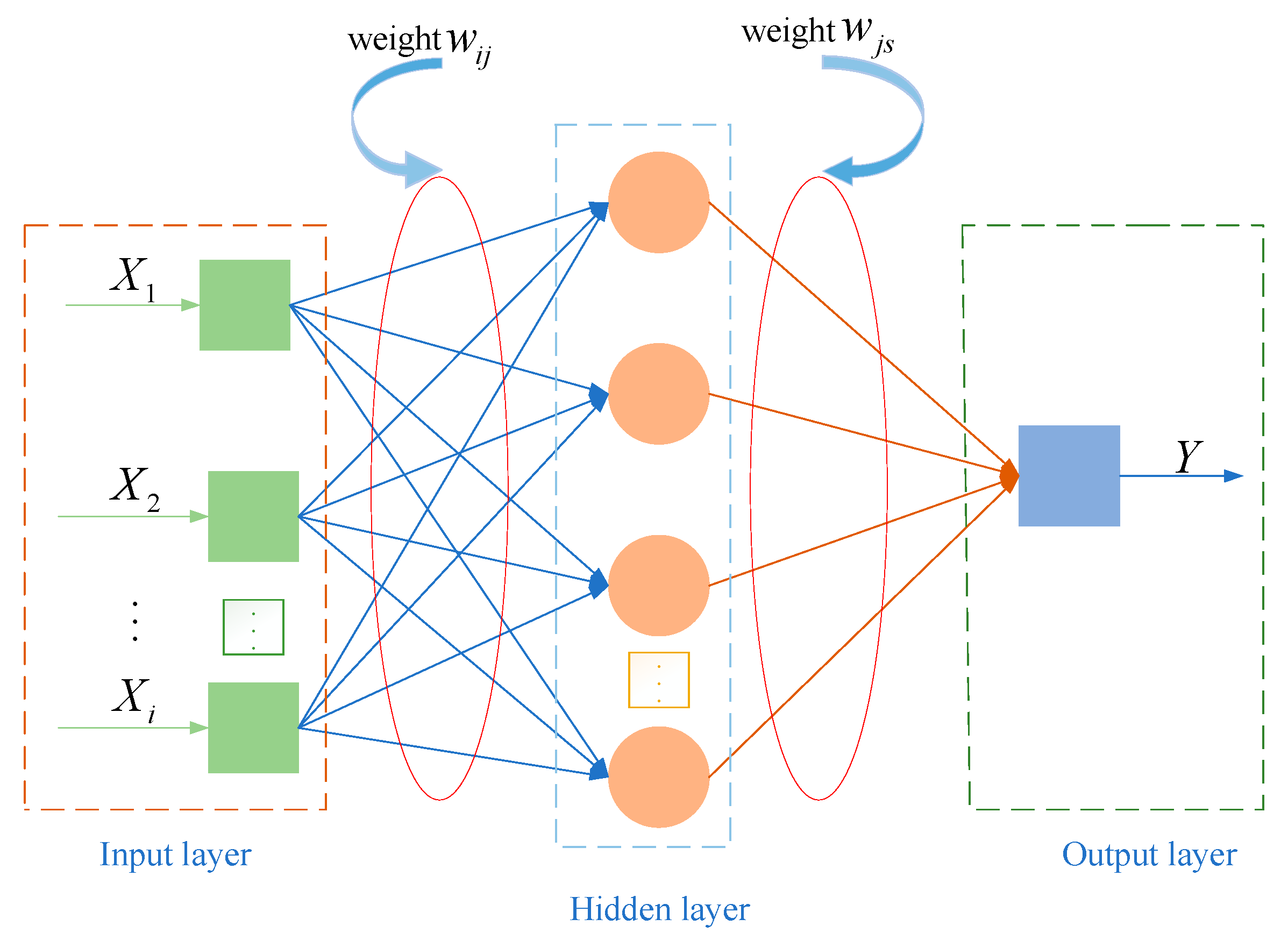
2.1. BP Neural Network
2.2. Particle Swarm Optimization
2.3. BP Neural Network Model for Particle Swarm Optimization
- (1)
- Initialize the parameters of the BP neural network and particle swarm. Combined with the sample data, the number of neurons c, P, and d in the input layer, hidden layer and output layer of the BP neural network is established. Set the particle swarm population size N, learning factors c1 and c2, the maximum number of iterations K, and the inertia weight ω.
- (2)
- Calculate the fitness of the particle swarm. The quality of the population is determined by the fitness function, which selects the mean square error between the actual value and the predicted value of the neural network.
- (3)
- Update individual and global optimal values. According to the fitness function, the fitness values of the current moment and the previous moment of the particle are compared. If the current fitness value is smaller, the effect is better, and the individual optimal value is updated; otherwise, it is not updated. Similarly, the fitness value of the particle group at the current moment and the previous moment is compared. If the fitness value at the current moment is smaller, the fitness is better, and the global optimal value is updated; otherwise, it is not updated [16].
- (4)
- Update the velocity and position of the particles. The particle velocity and position are updated according to Formulas (2) and (3).
- (5)
- Determine whether PSO meets the end condition. When the particle swarm optimization algorithm reaches the maximum number of iterations set or meets the error requirements, the algorithm ends, and the optimal solution is obtained. If it is not satisfied, return to (2).
- (6)
- The optimal solution is assigned to the weights and thresholds of the BP neural network [17]. Adjust the weights and thresholds of the neural network, train and predict the BP neural network, and obtain the simulation results.
3. Establishment and Analysis of Vehicle Ownership Prediction Model Based on PSO-Optimized BP Neural Network
3.1. Main Influencing Factors and Sample Data of Car Ownership
3.2. Parameter Determination of BP Neural Network
3.3. Parameter Determination of PSO-BP Neural Network
3.4. Effect Evaluation of Prediction Model
4. Results and Analysis of Prediction Model
4.1. Effect Evaluation of Prediction Model
4.2. Design Process of Prediction Model
4.3. Analysis of Prediction Model Results
5. Discussions
6. Conclusions
- (1)
- The particle swarm optimization algorithm is used to optimize the weights and thresholds of the BP neural network. According to the main influencing factors and sample data of vehicle ownership, a prediction model based on the PSO-BP neural network is established, which solves the problem that the traditional BP neural network easily falls into local minimum and has a slow convergence speed.
- (2)
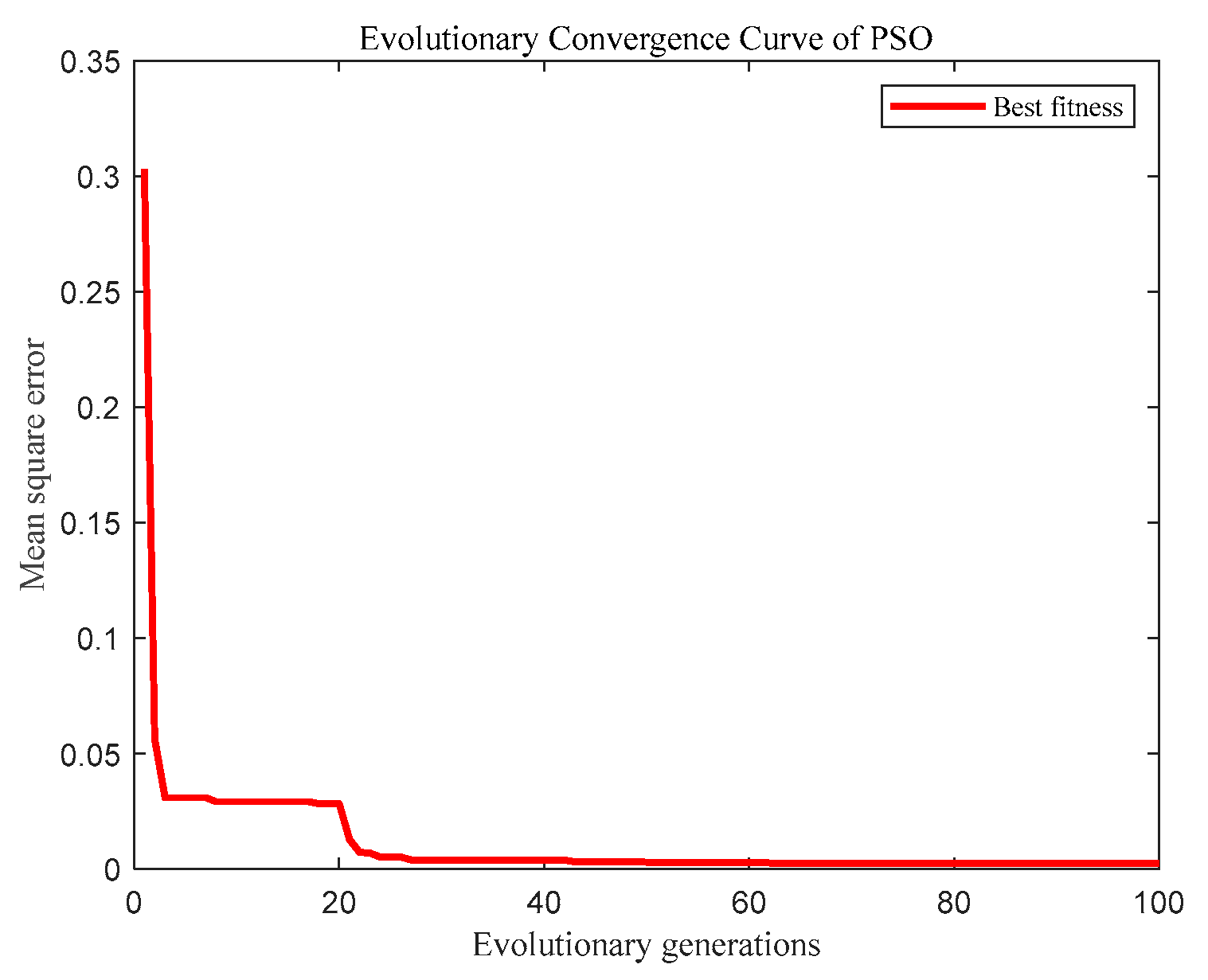
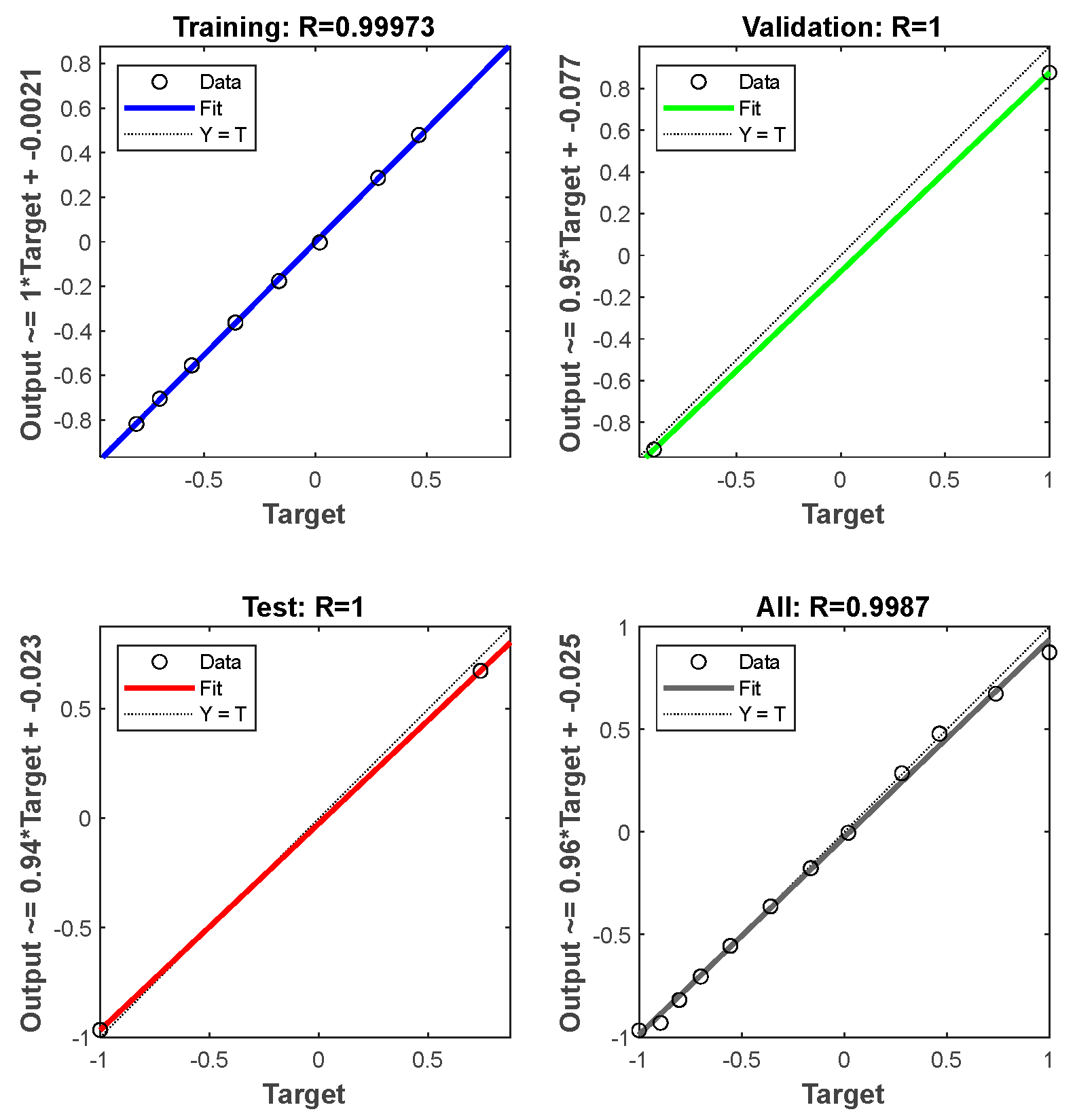
- The PSO-BP neural network model has better performance than the traditional BP neural network. The prediction accuracy of the PSO-BP model is better than that of a single BP neural network model. The PSO-BP model shows extremely high accuracy in the training process, and the convergence speed is also very fast. The preset accuracy is achieved only when the training times are 3 times and the training time is 0.043 s. The MSE, MAPE and RMSE of the predicted value and the expected value of the PSO-BP model are the smallest, with values of 0.0037557,0.020111 and 0.061283, respectively, and the coefficient of determination R2 is 0.96002; thus, its overall prediction effect is the best.
- (3)
- The error MSE, MAPE, RMSE and R2 of PSO-BP were 0.0037557,0.020111,0.061283 and 0.96002, respectively, which were 3.08463%, 3.82%, 12.4727% and 4.425% higher than those of the BP neural network prediction model. Compared with the GA-BP model, these values increased by 0.13211%, 0.01751%, 0.9969% and 0.235%; compared with the WOA-BP model, these values increased by 0.61555%, 1.4018%, 3.8272% and 2.153%, so the PSO-BP model had the highest prediction quality.
- (4)
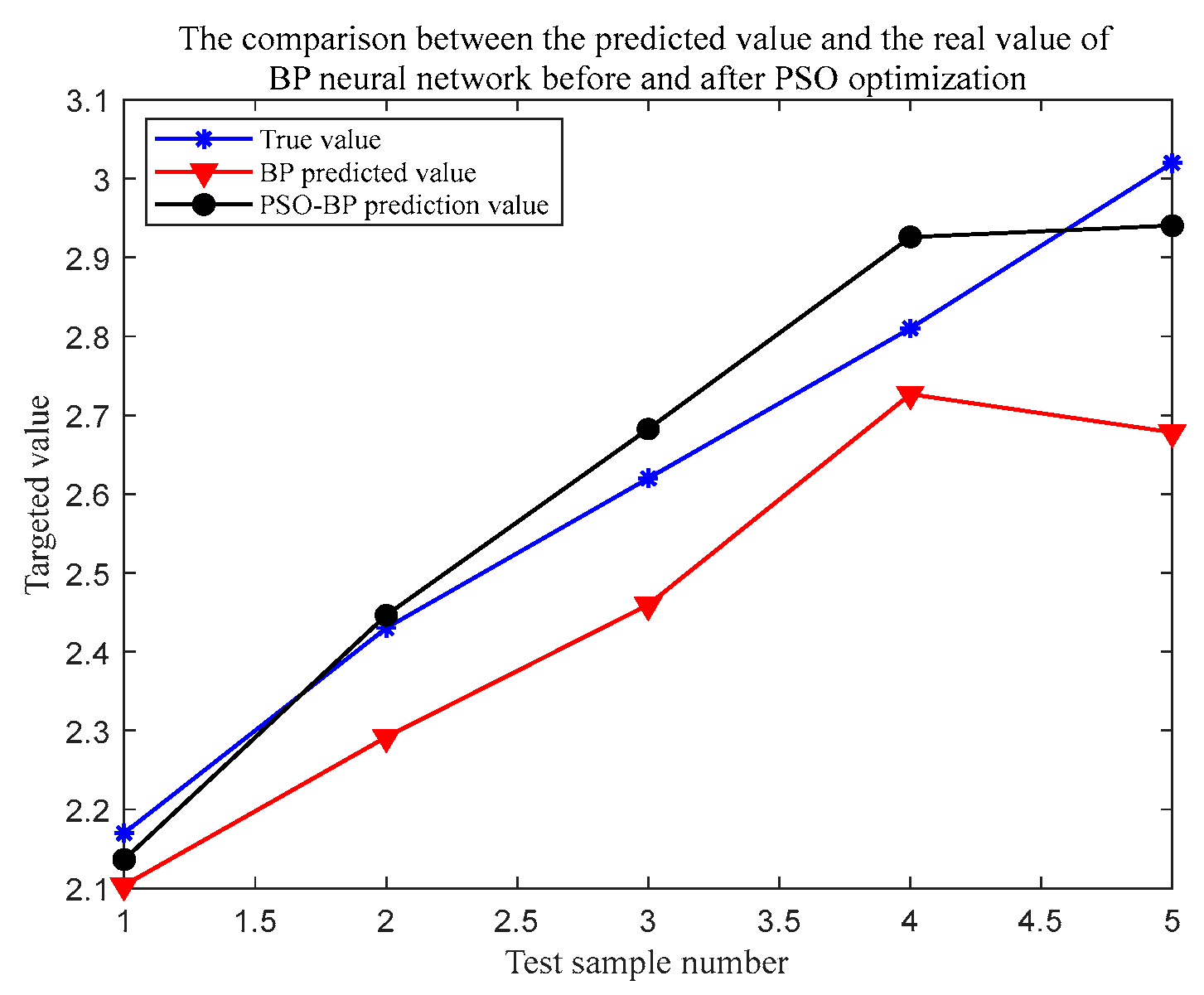
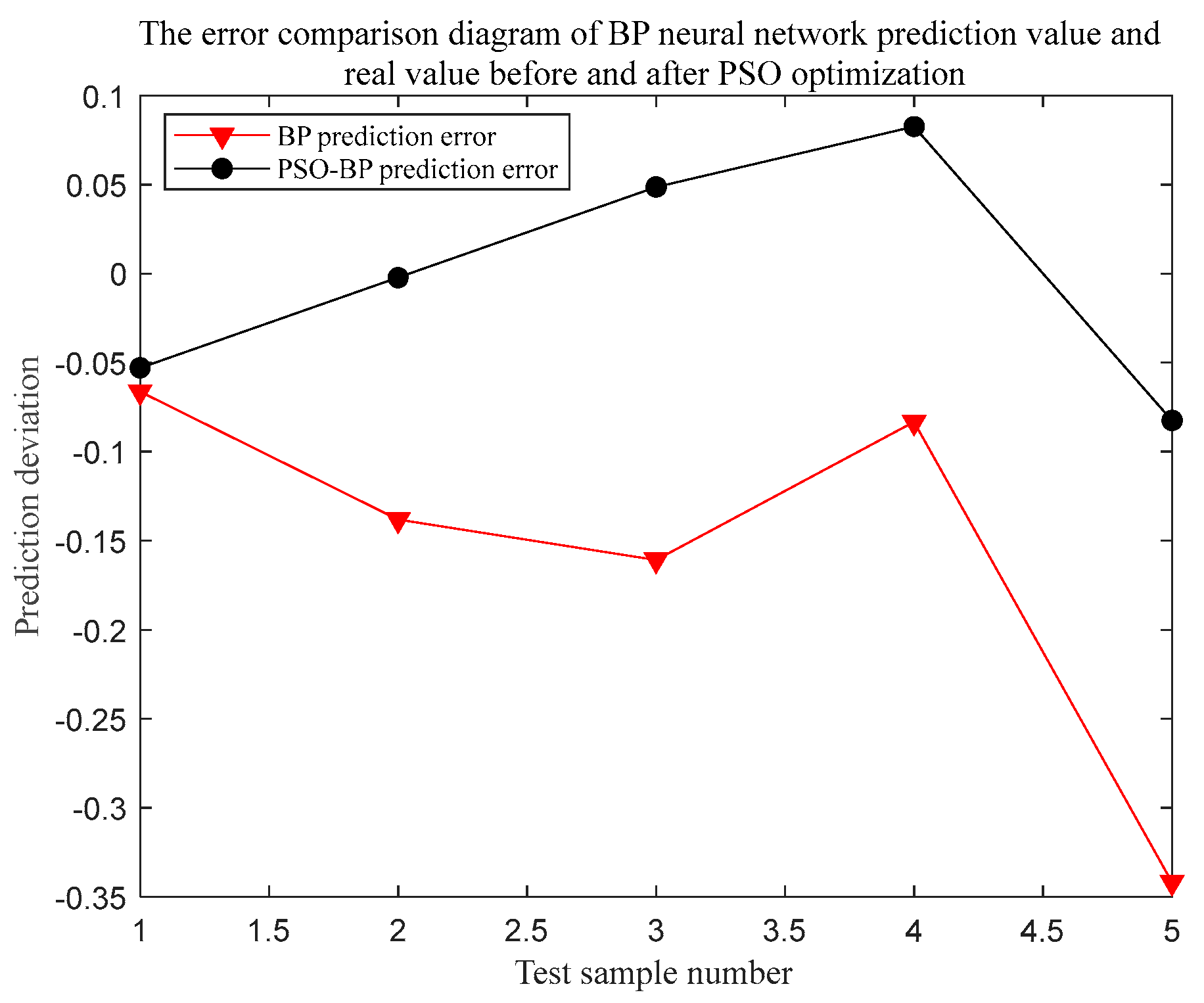
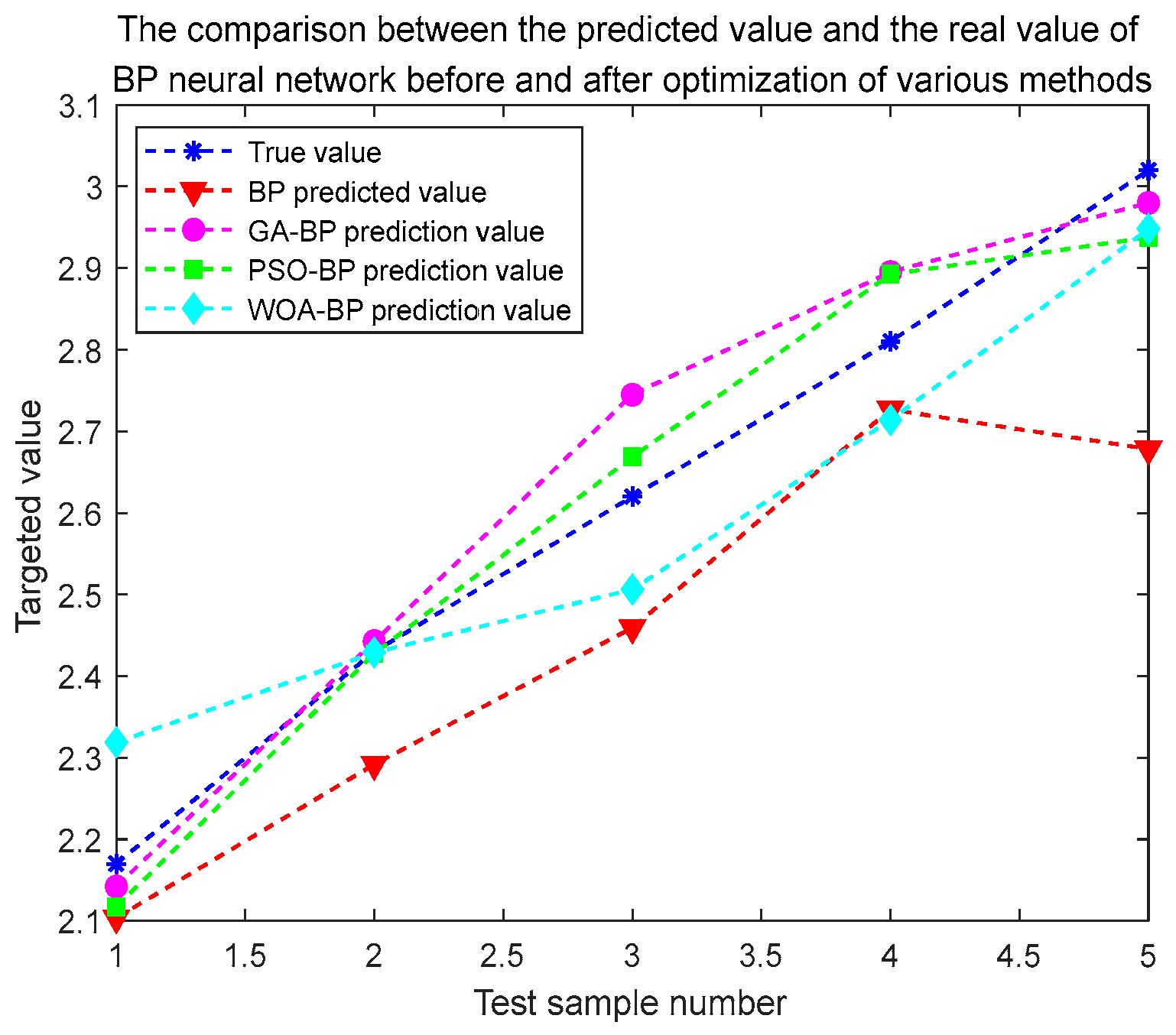
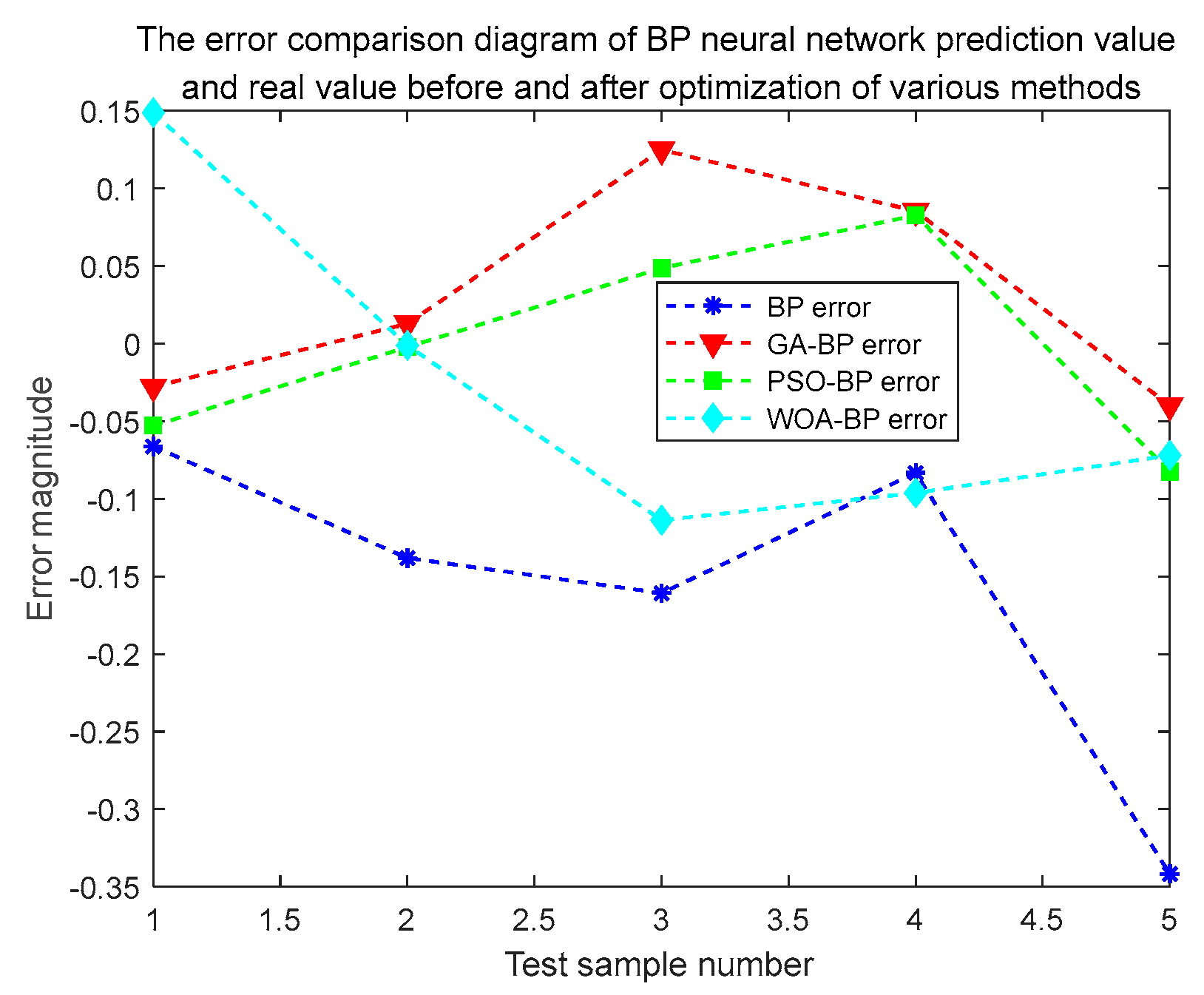
- By comparing the prediction results and errors of the neural network before and after PSO optimization, the predicted value of the PSO-BP neural network can be seen to be close to the real value, and its fitting degree is higher. At the same time, the error of the PSO-BP model is small, and its fluctuations are small. The prediction model based on the PSO-BP neural network has high accuracy and good stability and can effectively predict car ownership.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, W.Q.; Xia, J. Prediction of China’s Car Ownership by Grey Neural Network with Simpson Formula. J. Chongqing Jiaotong Univ. Nat. Sci. 2019, 38, 101–108. [Google Scholar] [CrossRef]
- Zhang, L.Y.; Hu, X.S.; Chen, Q.Y.; Qiu, R.Z. Prediction of Car Ownership Based on Principal Component Analysis and Logistic Regression. J. Chongqing Jiaotong Univ. Nat. Sci. 2017, 36, 104–109. [Google Scholar] [CrossRef]
- Zhang, G.F.; Chen, X.; Li, S.X. Research on Forecast of Electric Vehicle’s Ownership Based on the Comparison of Bass Model and Lotka-Volterra Model. J. Wuhan Univ. Technol. Inf. Manag. Eng. 2017, 39, 91–98. [Google Scholar]
- Du, D.F.; Jia, J.H. Joint prediction of car ownership based on improved Compertz-PCA. Technol. Econ. Areas Commun. 2021, 23, 47–53. [Google Scholar]
- Lian, L.; Tian, W.; Xu, H.F.; Zheng, M.L. Modeling and Forecasting Passenger Car Ownership Based on Symbolic Regression. Sustainability 2018, 10, 2275. [Google Scholar] [CrossRef]
- Lou, G.Z.; Tan, Y. Prediction of the height of water flowing fractured zone based on PSO-BP neural network. Coal Geol. Explor. 2021, 49, 198–204. [Google Scholar]
- Zhang, X.W.; Chang, J.Y. Research on Urban Car Ownership Prediction Based on PCA-BP Neural Network. Comput. Simul. 2012, 29, 376–379. [Google Scholar]
- Wu, C.R.; Wang, S.S. Research of RBF Neural Network Factor Analysis to Forecasting the Automobile Population. In Proceedings of the 9th China Intelligent Transportation Annual Conference, Guangzhou, Guangdong, China, 11 November 2014; pp. 233–239. [Google Scholar]
- Wang, D. Prediction of Car Ownership Based on Grey Relational Analysis and BP Neural Network. Comput. Tech. Autom. 2015, 34, 29–33. [Google Scholar] [CrossRef]
- James, D.; Sofia, K.; Christian, B.; Malcolm, M.; Keith, B. Spatially Disaggregated Car Ownership Prediction Using Deep Neural Networks. Future Transp. 2021, 1, 113–133. [Google Scholar]
- Long, W.; Liang, X.M.; Xiao, J.H.; Yan, G. Dynamic hierarchical hybrid particle swarm optimization algorithm. Control. Decis. 2009, 24, 1513–1516+1521. [Google Scholar]
- Cheng, X.Y.; Hu, X.P.; Li, Z.Z.; Geng, C.H.; Liu, J.X.; Liu, M.; Zhu, B.K.; Li, Q.; Chen, Q.G. Using Genetic Algorithm and Particle Swarm Optimization BP Neural Network Algorithm to Improve Marine Oil Spill Prediction. Water Air Soil Pollut. 2022, 233, 354. [Google Scholar] [CrossRef]
- Wang, F.Q.; Li, X.L.; Yu, X.B. Study on Optimization of Denitrification System for Coal-fired Units Based on GA-BP Predictive Control. Control. Eng. China 2021, 28, 1490–1495. [Google Scholar] [CrossRef]
- Wang, H.C.; Li, S.; Lin, L.; Zhai, C.; Xing, W.M. Deformation Prediction of Adjacent Tunnel Induced by Foundation Pit Excavation Based on BP Network Model. Chin. J. Undergr. Space Eng. 2021, 17, 832–839+847. [Google Scholar]
- Ma, H.H. Research on Beamforming of IRS-Assisted Secure Communication System Based on PSO Algorithm; Nanjing University of Posts and Telecommunications: Nanjing, China, 2022. [Google Scholar]
- Hui, Y.; Wang, Y.G.; Peng, H.; Hou, S.Q. Subway passenger flow prediction based on optimized PSO-BP algorithm with coupled spatia-temporal characteristics. J. Traffic Transp. Eng. 2021, 21, 210–222. [Google Scholar] [CrossRef]
- Chen, Z.M.; Zou, J.S.; Wang, W.; Shi, M.Q. Multi-objective optimization of casting-forging dynamic forming based on improved particle swarm neural network and finite element analysis. J. Jilin Univ. Eng. Technol. 2022, 52, 1524–1533. [Google Scholar] [CrossRef]
- Xiao, R.G.; Wang, D.; Wang, Q.X. Prediction of corrosion rate of submarine oil and gas pipelines based on ASO-BP neural network. Chem. Ind. Eng. 2022, 39, 109–116. [Google Scholar] [CrossRef]
- Yang, H.G.; Gu, J.H.; Jiang, L.; Pang, Y.J.; Li, L. Measuring error rea-time modeling prediction of CNC machine tool son-machine measuring system based on DSP. J. Hefei Univ. Technol. Nat. Sci. 2020, 43, 157–161. [Google Scholar]
- Ning, Y.X.; Cui, X.M. PSO-ELM prediction model for surface deformation of mine slope. Coal Geol. Explor. 2020, 48, 201–206+216. [Google Scholar]
- Wang, Q.H.; Jia, S.Y.; Hu, J.H.; Shuang, Y.H.; Zhao, T.L. Prediction of pipe shape in cross-rolled piercing by PSO-BP neural network based on GRA. Forg. Stamp. Technol. 2022, 47, 88–94. [Google Scholar] [CrossRef]
- Yang, S.R.; Bai, H.Q.; Bao, J.; Ren, L.; Li, C.F. Prediction of cladding layer morphology based on BP neural network optimized by regression analysis and genetic algorithm. Laser Optoelectron. Prog. 2022, 59, 149–157. [Google Scholar]
- Cao, G.X.; Wang, X.; Lei, G.C. Simulation of alpine wetlands CO2 flux and its influencing factors based on BP neural network optimized by genetic algorithm in Oinghai—Tibet Plateau. J. Shandong Univ. Nat. Sci. 2021, 56, 33–41+50. [Google Scholar]
- Zhou, Z.; Zhang, J.J.; Ding, H.H.; Li, F. Prediction model of sewage treatment in tunnel green construction based on PSO-BP neural network. J. Railw. Sci. Eng. 2022, 19, 1450–1458. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year (Years) | Gross National Income (Billion CNY) | GDP per Capita (CNY) | Total Population (Ten Thousand People) | Total Import and Export (Billion CNY) | Retail Sales of Consumer Goods (Billion CNY) | Per Capita Disposable Income of Urban Residents (CNY) | Highway Passenger Traffic (Million) | Road Freight Volume (Ten Thousand Tons) | Highway Mileage (Ten Thousand Kilometers) | Car Ownership (Billions of Vehicles) |
|---|---|---|---|---|---|---|---|---|---|---|
| 2005 | 185,998.9 | 14,368 | 130,756 | 116,921.77 | 66,491.7 | 10,382 | 1,697,381.00 | 1,341,778 | 334.52 | 0.42 |
| 2006 | 219,028.5 | 16,738 | 131,448 | 140,974.74 | 76,827.2 | 11,620 | 1,860,487.00 | 1,466,347 | 345.70 | 0.50 |
| 2007 | 270,704.0 | 20,494 | 132,129 | 166,924.07 | 90,638.4 | 13,603 | 2,050,680.00 | 1,639,432 | 358.37 | 0.57 |
| 2008 | 321,229.5 | 24,100 | 132,802 | 179,921.47 | 110,994.6 | 15,549 | 2,682,114.00 | 1,916,759 | 373.02 | 0.65 |
| 2009 | 347,934.9 | 26,180 | 133,450 | 150,648.06 | 128,331.3 | 16,901 | 2,779,081.00 | 2,127,834 | 386.08 | 0.76 |
| 2010 | 410,354.1 | 30,808 | 134,091 | 201,722.34 | 152,083.1 | 18,779 | 3,052,738.00 | 2,448,052 | 400.82 | 0.91 |
| 2011 | 483,392.8 | 36,277 | 134,916 | 236,401.95 | 179,803.8 | 21,427 | 3,286,220.00 | 2,820,100 | 410.64 | 1.06 |
| 2012 | 537,329.0 | 39,771 | 135,922 | 244,160.21 | 205,517.3 | 24,127 | 3,557,010.00 | 3,188,475 | 423.75 | 1.20 |
| 2013 | 588,141.2 | 43,497 | 136,726 | 258,168.89 | 232,252.6 | 26,467 | 1,853,463.00 | 3,076,648 | 435.62 | 1.40 |
| 2014 | 644,380.2 | 46,912 | 137,646 | 264,241.77 | 259,487.3 | 28,844 | 1,736,270.00 | 3,113,334 | 446.39 | 1.54 |
| 2015 | 685,571.2 | 49,922 | 138,326 | 245,502.93 | 286,587.8 | 31,195 | 1,619,097.00 | 3,150,019 | 457.73 | 1.75 |
| 2016 | 742,694.1 | 53,783 | 139,232 | 243,386.46 | 315,806.2 | 33,616 | 1,542,758.67 | 3,341,259 | 469.63 | 1.95 |
| 2017 | 830,945.7 | 59,592 | 140,011 | 278,099.24 | 347,326.7 | 36,396 | 1,456,784.33 | 3,686,858 | 477.35 | 2.17 |
| 2018 | 915,243.5 | 65,534 | 140,541 | 305,010.09 | 377,783.1 | 39,251 | 1,367,170.39 | 3,956,871 | 484.65 | 2.43 |
| 2019 | 983,751.2 | 70,078 | 141,008 | 315,627.32 | 408,017.2 | 42,359 | 1,301,172.91 | 3,435,480 | 501.25 | 2.62 |
| 2020 | 1,005,451.3 | 71,828 | 141,212 | 322,215.24 | 391,980.6 | 43,834 | 689,425.00 | 3,426,413 | 519.81 | 2.81 |
| 2021 | 1,133,239.8 | 80,976 | 141,260 | 391,008.54 | 440,823.2 | 47,412 | 508,693.25 | 3,913,889 | 528.07 | 3.02 |
| Error | Number of Hidden Layer Nodes | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | |
| MSE | 0.22024 | 0.012319 | 0.0053561 | 0.005423 | 0.0015201 | 0.011768 | 0.00094295 | 0.0082886 | 0.029614 | 0.0019994 |
| Training Times | 1000 Times |
|---|---|
| Learning rate | 0.01 |
| Minimum training target | 0.0001 |
| Display frequency | Show every 25 workouts |
| Momentum factor | 0.01 |
| Minimum performance gradient | 1 × 10−6 |
| Maximum number of failures | 6 |
| Population Size N | Maximum Evolutionary Algebra K | Learning Factor c1 | Learning Factor c2 | Inertia Weight ω |
|---|---|---|---|---|
| 10 | 100 | 2 | 2 | 0.9 |
| Serial No. | True Value | BP Predicted Value | PSO-BP Predicted Value | BP Error | PSO-BP Error |
|---|---|---|---|---|---|
| 1 | 2.1700 | 2.1037 | 2.1171 | −0.0663 | −0.0529 |
| 2 | 2.4300 | 2.2918 | 2.4277 | −0.1382 | −0.0023 |
| 3 | 2.6200 | 2.4592 | 2.6686 | −0.1608 | 0.0486 |
| 4 | 2.8100 | 2.7266 | 2.8925 | −0.0834 | 0.0825 |
| 5 | 3.0200 | 2.6783 | 2.9375 | −0.3417 | −0.0825 |
| Prediction Model | MSE | MAPE | RMSE | R2 |
|---|---|---|---|---|
| BP Neural Network | 0.034602 | 0.058311 | 0.18601 | 0.91577 |
| PSO-Optimized BP Neural Network | 0.0037557 | 0.020111 | 0.061283 | 0.96002 |
| Serial Number | True Value | GA-BP Prediction Value | WOA-BP Prediction Value | GA-BP Prediction Error | WOA-BP Prediction Error |
|---|---|---|---|---|---|
| 1 | 2.1700 | 2.1421 | 2.3187 | −0.0279 | 0.1487 |
| 2 | 2.4300 | 2.4427 | 2.4288 | 0.0127 | −0.0012 |
| 3 | 2.6200 | 2.7448 | 2.5062 | 0.1248 | −0.1138 |
| 4 | 2.8100 | 2.8953 | 2.7137 | 0.0853 | −0.0963 |
| 5 | 3.0200 | 2.9800 | 2.9479 | −0.0400 | −0.0721 |
| Forecasting Model | MSE | MAPE | RMSE | R2 |
|---|---|---|---|---|
| Conventional BP Neural Network | 0.034602 | 0.058311 | 0.18601 | 0.91577 |
| BP Neural Network Optimized by Genetic Algorithm | 0.0050768 | 0.021862 | 0.071252 | 0.95767 |
| BP Neural Network Optimized by Whale Optimization Algorithm | 0.0099112 | 0.034129 | 0.099555 | 0.93849 |
| BP Neural Network Optimized by Particle Swarm Optimization | 0.0037557 | 0.020111 | 0.061283 | 0.96002 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Li, Y.; Yan, L. Prediction Model of Car Ownership Based on Back Propagation Neural Network Optimized by Particle Swarm Optimization. Sustainability 2023, 15, 2908. https://doi.org/10.3390/su15042908
Zhang H, Li Y, Yan L. Prediction Model of Car Ownership Based on Back Propagation Neural Network Optimized by Particle Swarm Optimization. Sustainability. 2023; 15(4):2908. https://doi.org/10.3390/su15042908
Chicago/Turabian StyleZhang, Hualei, Yuan Li, and Lianghuan Yan. 2023. "Prediction Model of Car Ownership Based on Back Propagation Neural Network Optimized by Particle Swarm Optimization" Sustainability 15, no. 4: 2908. https://doi.org/10.3390/su15042908
APA StyleZhang, H., Li, Y., & Yan, L. (2023). Prediction Model of Car Ownership Based on Back Propagation Neural Network Optimized by Particle Swarm Optimization. Sustainability, 15(4), 2908. https://doi.org/10.3390/su15042908