Abstract
This work presents a real-life demonstration of 23 heavy-duty (HD) public electric buses (e-buses) in Jaworzno, Poland, with three lengths: 8.9 m, 12 m, and 18 m. The e-bus demo is based on the development of baseline e-buses to optimize the operational cost based on technical optimization. The demo aims to switch public transportation from internal combustion engine vehicles (ICEVs) to electric ones to minimize CO2 emissions. The e-buses are equipped with standard charging solutions, which are plug-in charging with Combined Charging System Type 2 (CCS2, Combo 2) and pantograph-up (Type B). The CCS2 solution is used for overnight slow/normal charging (NC) in the depot of the e-bus operator, whereas the pantograph charging solutions are installed along the e-buses routes and used for fast charging (FC) when the e-buses are stopped for a short time. In Jaworzno, there are 20 chargers with CCS2 in the depot of the e-bus operator and 12 pantograph-up (Type B solution) fast-charging stations. This work studies the technical operations and operational costs of the e-bus fleet, and the impact of the NC and FC solutions on the Li-ion battery packs and on the grid. The uncoordinated/standard and coordinated charging (smart charging) based on load shifting were investigated to study the impact of e-bus fleet integration on the distribution grid. The exploited data in this study were collected from the data logger devices, which are installed on the e-buses and record over 46 signals. Data from over one year were collected, and some sample data were processed and analyzed to study the technical and economic operations of the e-bus fleet.
1. Introduction
Global warming has become a critical issue for the welfare of our planet over the past few decades. The total CO2 emissions in the world doubled in the period from 1971 to 2010. This increase in the CO2 emissions in the atmosphere is one of the main causes of global warming. To protect our environment, it is essential to reduce CO2 emissions. Correspondingly, the European Commission (EC) has set the target of reducing CO2 emissions by 20% by 2020 compared to 1990. The major sources of CO2 emissions are conventional power sources, such as coal, deiseal, fuel oil, etc. These sources have been replaced mainly with wind turbines and solar PV. According to the International Energy Agency (IEA), the CO2 emissions from transportation is the second main cause of global CO2 emissions, which was around 22% of the world’s CO2 emissions in 2010. This mainly comes from public transport vehicles due to long operating time, which is up to 18 h/day, compared to less than 1 h/day for commercial ones. The CO2 emissions of heavy-duty transportation vehicles is about 80% of those of commercial ones. Moreover, the number of HD vehicles is expected to increase in the coming years [1,2]. The vast majority of HD vehicles in operation across Europe run on diesel (97.8% of trucks; 94.5% of buses) [3].
Electrified vehicle technology is emerging as a leading technology to achieve the above-mentioned objectives, more so than conventional internal combustion engine vehicles (ICEVs). The production numbers of electrified vehicles remain slightly low due to the high additional cost of the electric powertrain and storage system. Hence, heavy-duty (HD) and medium-duty (MD) vehicle manufacturers have a strong trend of reducing the total cost of ownership (TCO) in order to improve the business case to comply with EU regulations, cities, and end users’ needs for clean transport [4,5].
MD and HD electric transport vehicles have made a significant improvement in energy management optimization and efficiency enhancement over the past few years, thanks to H2020 projects such as ZeEUS, ORCA, EBSF_2, 3iBS, HCV, etc. Bus fleets had precedence for testing alternative fuels and public transport electrification (PTE), which ranges from 40 to 50%. Moreover, PTE, in combination with renewable energy sources (RES), may further enhance the green energy transition. The competitiveness of European urban HD, MD, and light-duty vehicle manufacturers and component/system suppliers is based on technological leadership. This is true in general, and in particular for the new incoming technologies, such as electrified powertrain-based solutions for which future wide-scale diffusion depends largely on improvements to electrochemical energy storage systems, further powertrain optimization, fast-charging technologies, and simplifications. As a consequence, the continued strength of the European urban HD, MD, and light-duty industry will relate directly to the remaining competitiveness in this area [6,7].
In this scenario, maintaining and reinforcing the strategic leading position of the European industry across the entire value chain of urban HD and MD vehicles represents one of the key EU challenges. The enabling technologies (i.e., energy storage, fast (and superfast) charging technologies, energy management optimization, power-train simplifications, and higher energy efficiency) will support the development of new higher range and performance of the future advanced electrified HD and MD vehicles. These technologies can solve the problem of noxious CO2 emissions in urban areas and help ensure good air quality. For bus operators in the long-term perspective, urban HD and MD electric transport vehicles can also be cost-effective. Therefore, a bunch of new vehicle concepts have been proposed over the past few years that relate to energy management and storage technologies. Some of these concepts are being tested and demonstrated in public transport fleets and it is expected to have a considerable contribution in smart grid operation in the near future [1].
The real-life demo presented in this work is part of the ASSURED project. This project is one of several projects concerning HD vehicles, such as the ZeEUS project. In the ZeEUS project, several demos were launched, such as Barcelona, Bonn, Cagliari, Eindhoven, London, Münster, PILSEN, STOCKHOLM, and WARSAW. The demo descriptions are listed in Table 1 [8].

Table 1.
HD vehicle demos from the ZeEUS project.
In the ASSURED project, there were several use case (UC) demos related to the HD vehicles with fast charging technologies that have been developed and tested in terms of functionality and interoperability (see Table 2). In this work, we present the real-life demo in Jaworzno.
Table 2.
Overview of ASSURED use cases and demonstrators in work packages 7 and 8 (WP7&8) [9]. * Custom Wireless Power Transfer Unit designed and manufactured by POLITO; ** External to ASSURED.
In Jaworzno, an electric bus (e-bus) fleet of 23 HD vehicles was demonstrated in real-life operation for public transport. The e-buses had three various lengths, 8.9 m, 12 m, and 18 m. The e-buses were equipped with plug-in (for overnight charging) and pantograph-up (for opportunity charging) charging technologies and with different battery size capacities.
In the ASSURED project, standards related to automated connection devices (ACDs) based on pantograph charging technologies were introduced. Type A charging technology in ASSURED refers to a top-down pantograph (ACD installed in the infrastructure mast). Type B technology refers to a bottom-up pantograph (ACD installed on the vehicle roof). The Jaworzno e-buses were equipped with a bottom-up pantograph (Type B) and CCS2 (Combo 2).
In order to minimize the TCO and improve the operational cost of the e-buses, the buses were equipped with a specially optimized battery configuration. The available battery pack capacity enabled the e-buses to reach their destination safely since there are some fast-charging solutions available on the e-bus paths. In this work, the NC and FC solutions are presented. The NC is mostly used when the e-buses are in an off-work period since it takes a long time (in a range of hours) and usually the energy price is low, whereas the FC solution is done when the e-buses are in a work period where the buses have stopped for a short time, e.g., when collecting passengers. The FC has an impact on the grid due to the high power demand, operational cost due to energy price during the day, and battery life due to high charging current rate.
Generally, the traction batteries are one of the most significant EV components that decisively affect the vehicle price, range, efficiency, and operational costs. It is expected to be the major restriction on EV sales. However, although a wide range of battery technology is available, a having a comprehensive battery technology option is what characterizes the manufacturers. Due to the characteristic features of Li-ion batteries, among others, it is expected to be the most used in portable and handheld electronics as well as in EVs. Some EVs use this battery technology, such as Tesla, Nissan Leaf, VW E-Golf, Solaris e-buses, and some other e-buses listed in Table 1. The charging and discharging current must be keep within the operational limits of the Li-ion batteries, otherwise the lifetime of the traction of the battery system may significantly decrease. Therefore, a battery management system (BMS) is indispensable to control and manage the battery cells and keep them working within safe operating limits, particularly in case of e-buses, where fast charging and discharging happen frequently [10].
From the power grid perspective, distribution system operator (DSO) grids worldwide are designated to supply residential loads. In recent years, due to climate change concerns, EV integration has become a necessity. EVs need to be charged frequently via various charging solutions that are fed from the DSO grids. Although the charging solutions must respect the system operator network code, there are still some impacts on the grid. These impacts are represented by the following factors:
- Load profile, which impact the capacity of the existing DSO equipment;
- Energy price, due to the increase in demand;
- Power quality;
- Congestion;
- Voltage stress.
Generally, the impact of EVs charging on DSO networks depends on many factors, such as the number of EVs charging simultaneously as well as the charging pattern, unbalance, coordination, location, rate, and time [11]. In this work, the impact of e-bus integration on the grid was studied. The study included the impact of charging stations on transformer ratings, line ratings, and voltage stress. A grid network similar to the one in the depot charging station and pantograph solutions in Jaworzno were simulated in a Python environment based on pandapower library. In this work, real data from e-buses were used to model the charger and the e-buses.
This paper is organized as follows. Section 2 presents an overview of the e-bus fleet demo, description, objectives, and charging infrastructure in Jaworzno. Section 3 investigates the impact of the e-bus fleet on the DSO grid. Section 4 analyzes the demo operation based on the data collected from the logging devices that were installed in the e-buses. Section 5 presents the e-bus fleet’s impact on the environment. Section 6 explains the adopted e-bus management system. Section 7 contains the conclusion of this work.
2. e-Bus Fleet Demo
In this section, the baseline e-bus and e-bus demos are described in detail, including the adopted optimization techniques in the e-bus demos. The charging infrastructure that powered the e-buses is described as well.
2.1. Baseline Vehicle
The baseline demonstrator is the Solaris Urbino electric bus, TRL 9, manufactured by Solaris Bus & Coach sp. z o. o, Poland (see Figure 1). Due to innovation, equipment, and modern solutions tailored to each vehicle for individual clients, the Solaris Urbino electric was named the baseline bus and the “Bus of the Year 2017.” The bus achieved very good results in energy consumption compared to previous editions and other e-buses from different manufactures.

Figure 1.
Baseline Solaris Urbino electric bus, TRL 9.
2.2. Demo Description
The goal of the 23 e-bus fleet demo is to optimize the vehicle operation process, including the power consumption, and provide an improved version of the baseline vehicle. The demo resulted in overall operational cost reduction compared to the baseline vehicle.
The e-bus fleet demo is in real-life operation in Jaworzno, which has a population of around 90,000 and medium traffic congestion. The e-bus fleet in Jaworzno includes three models: one low-entry (LE) Urbino 8.9 LE electric model, two low-floor (LF) Urbino 12 electric model, and the articulated Urbino 18 electric. The numbers in the model names refer to the e-bus length, i.e., 8.9 m, 12 m, and 18 m.
In Jaworzno, there are 23 e-buses operated by PKM Jaworzno. There are 4 units of 8.9 m e-buses, 10 units of 12 m e-buses, and 9 units of 18 m articulated e-buses. The e-buses are equipped with standard charging solutions, which are plug-in charging with a Combined Charging System (CCS2) connector and pantographs (Type B). The e-buses have no on-board charger (OBC), so both charging solutions provide a DC power to the e-bus batteries.
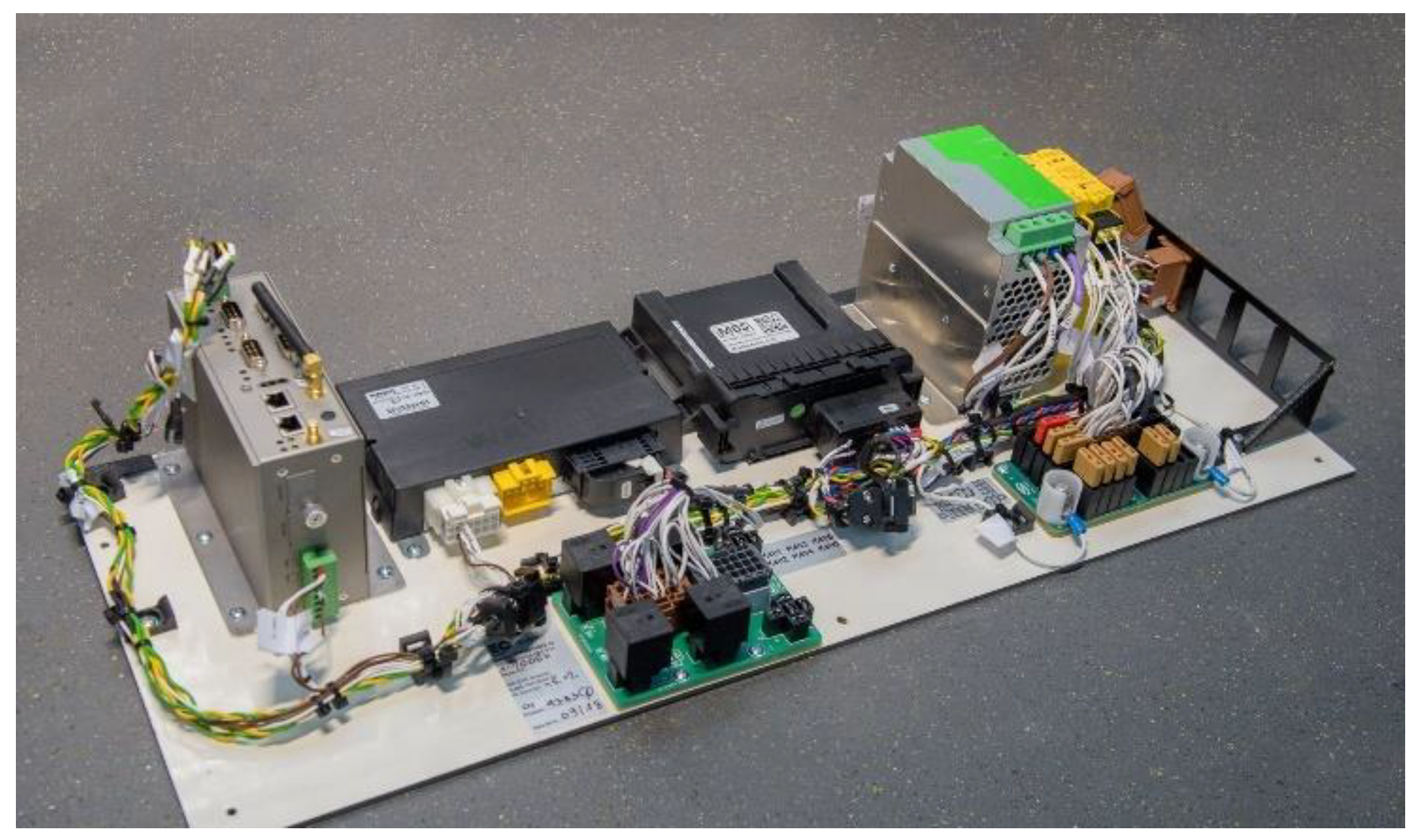
The e-buses are equipped with eSConnect data logging devices (Figure 2), which offer some extra software modification and features than what was equipped in the baseline vehicles in order to achieve the objectives of the demo. This device is responsible for data acquisition and communicating with the servers.
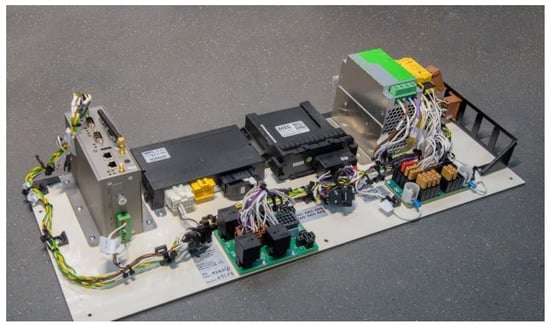
Figure 2.
eSConnect logging device with its related circuitry.
The eSConnect unit is an embedded system with a low-power processor and is designed to withstand harsh environmental temperatures ranging from −40 to 70 °C. The system can withstand 1G vibration (7–50 Hz), humidity ≤ 95%, and is electromagnetic compatibility (EMC) compliant, according to UN ECE R10.05. The system is equipped with data-logging capability from a Controller Area Network (CAN) bus. Thanks to its properties and software, it can remotely log signals from different components connected to a powertrain CAN-bus and transmit them in real time to a server for monitoring, optimization, and control purposes. The e-buses are equipped with systems that allow the number and weight of passengers to be detected. Then, the measured signals are sent to the eSconnect device. In total, there are over 46 parameters/signals that are measured/registered and saved with the eSconnect device, such as pressure sensors, external temperature, internal temperature, passenger flow, total mileage range, vehicle speed, date and time stamps, start of charging, end of charging, battery state-of-charge (SoC), recuperated power, etc.
2.2.1. 8.9 m e-Bus
The PKM Jaworzno bus operator has 4 units of Solaris Urbino 8.9 LE (see Figure 3) electric composed of Solaris high-energy lithium-ion batteries boasting a capacity of 160 kWh. PKM is the e-bus operator in Jaworzno, Poland.

Figure 3.
Solaris Urbino 8.9 LE electric.
The driveline in use is a central electric asynchronous motor with 160 kW of power. The buses are fitted with an air conditioner with 24 kW. The heating unit in use is an electric boiler of 25 kW. Moreover, the Urbino 8.9 LE electric is equipped with a 24 V electric installation, serving as a power source for the driver’s panel and for the electric power steering pump.
On account of the battery weight, it is crucial to arrange them correctly in the bus in order to distribute the weight evenly. In the Solaris Urbino 8.9 LE e-bus, the electric batteries are located in two areas: Two packs of 40 kWh each are placed in the rear of the bus, and two more on the roof, just before the second axle.
The roof layout of the Urbino 8.9 LE electric is as follows: A traction container is placed in the front, followed by an air-conditioning unit and then two 40 kWh battery packs. The pantograph is installed above the second axle, over the roof hatch. The braking resistor is located next to the pantograph closest to the right edge of the roof.
2.2.2. 12 m e-Bus
The PKM Jaworzno bus operator has 10 units of Solaris Urbino 12 electric (see Figure 4). The 12 m e-buses use a TSA traction motor of 160 kW, equipped with high-energy 160 kWh lithium-ion batteries and standard electrical installation based on the CAN-Bus system. The applied solution in regard to air conditioning is a 24 kW full-vehicle air-conditioning, whereas for heating, the e-buses use a 25 kW electric boiler. Moreover, Solaris 12 m e-buses are fitted with a 24 V electric installation, serving as a power source for the driver’s panel.

Figure 4.
Solaris Urbino 12 electric.
On account of the weight of the batteries, it is crucial to arrange them correctly on the bus. In Solaris’ e-buses the batteries are located in two areas: two packs of 40 kW at the rear of the vehicle and two on its roof over the front axle. On the roof of the new Urbino 12 electric are the traction batteries; behind those is the air conditioning, followed by the traction container. A pantograph is located above the second axle. A braking resistor is fitted into the rear part of the roof.
2.2.3. 18 m e-Bus
The 18 m e-bus (see Figure 5) uses a storage facility composed of a 240 kWh high-energy Li-ion battery. The driveline in use is a TSA central electric asynchronous motor of 240 kW. The e-buses also have standard electrical installation based on the CAN-Bus system.

Figure 5.
Solaris Urbino electric 18.
The air-conditioning system for the buses uses two devices of 24 kW each. The heating involves an electric boiler of 37.5 kW. Moreover, the buses are fitted with a 24 V electric installation, serving as a power source among others for the driver’s panel and for the electric power steering pump.
On account of the battery weight, it is crucial to arrange them correctly in the bus. In the articulated Solaris Urbino 18 electric bus, the batteries are located in two areas: Three packs of 40 kWh each are placed in the rear of the bus, and three more on the roof between the first and the second axle.
The roof layout of the buses is as follows: The first unit of air conditioning is placed over the first compartment, and right behind it are the battery packs and then the Schunk pantograph. A traction container, the second unit of air conditioning, and the braking resistor are placed above the second compartment, with the latter device converting surplus braking power into heat. As a standard, the socket of the plug-in systems is located behind the front door, right over the first axle.
In summary, the three main characteristics of the e-buses are listed in Table 3.
Table 3.
e-bus fleet characteristics.
2.3. Demo Objectives
The demo aims to reduce the CO2 emission in Jaworzno, reduce city noise, and optimize operational costs. To achieve these goals, a 23-bus fleet of electric urban buses for public transport were demonstrated in real-life operation (see Figure 6), and there is a plan to upscale the fleet to over 40 e-buses. Pursuing these goals, several improvements on the current baseline demonstration vehicle were performed. Coordinated charging could be adopted to lessen the impact on the power grid.

Figure 6.
Fleet of Solaris Urbino electric in Jaworzno.
2.4. Charging Infrastructure
Charging stations are regarded as the point of fueling EVs. Cords, connectors, and interfaces with the power grid are the key equipment of a charging station. The charging infrastructure stations are one of the key factors for the deployment of EVs. Generally, the EVs charging can be static, stationary, or dynamic. Static charging refers to the charging of a vehicle that is not moving and that is expected to stay in the same position for a long time, e.g., when the EV is parked in the depot. Stationary or opportunity charging (OppCharge) could also be done when the EV is stopped for a short time, and thus the charging should start automatically. On the other hand, dynamic charging means that the vehicle is charging while it is moving in normal traffic.
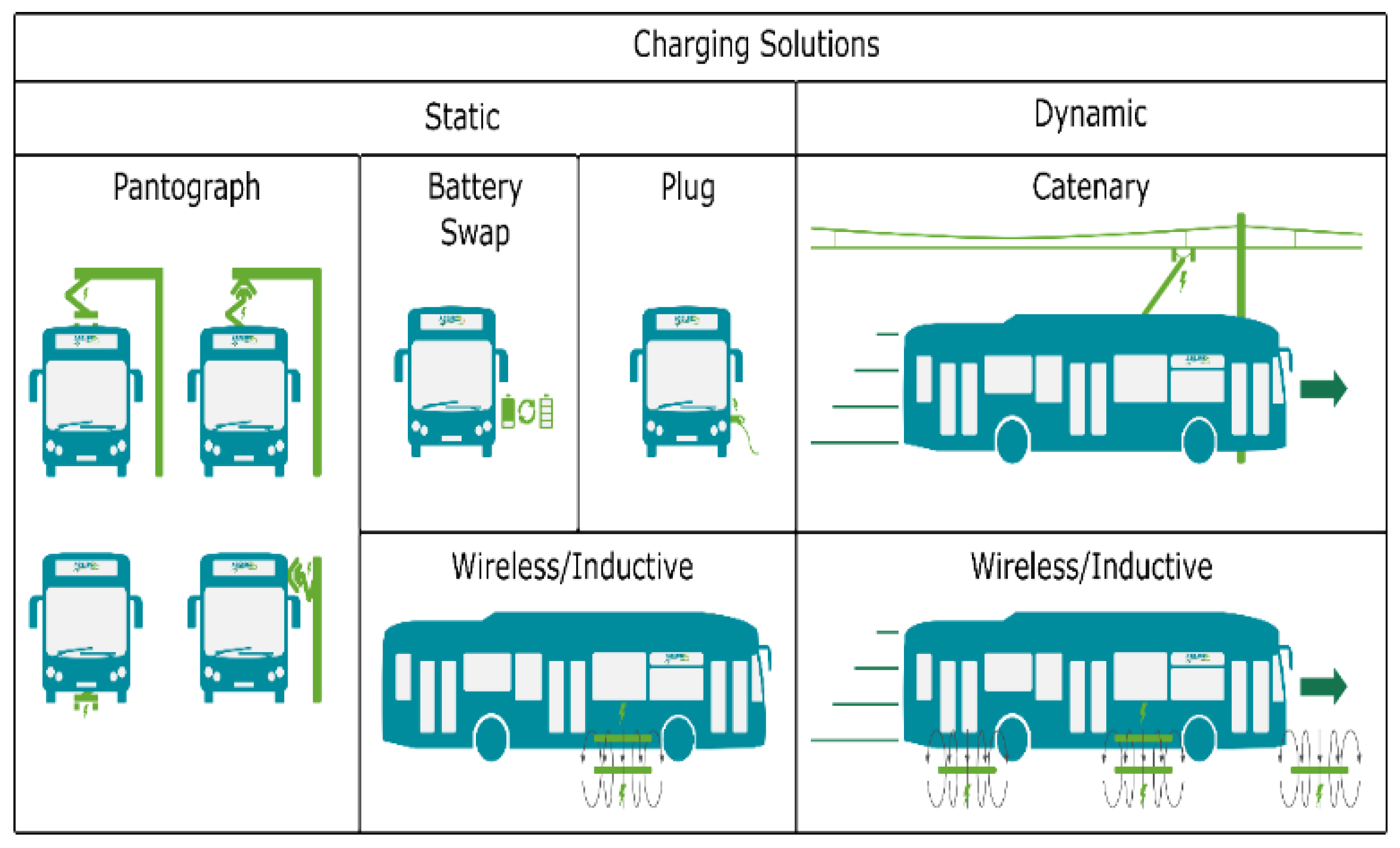
Based on the type of energy transfer and charging infrastructure, there are several solutions available for EV charging, which are categorized into the following types (see Figure 7):
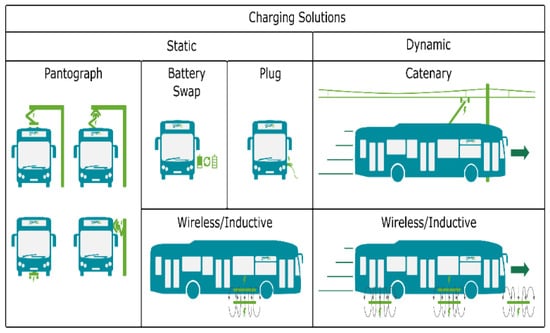
Figure 7.
Overview of charging technologies presented in end-user and technical surveys.
- Conductive charging (contact charging)
- ⚬
- Depot charging
- ⚬
- Opportunity charging
- ⚬
- Catenary charging
- ⚬
- Flash charging
- Wireless charging (inductive and capacitive)
- Battery swapping
The charging infrastructure is one of the major issues of the widespread use of EVs. As the battery pack capacity on the vehicle is restricted due to vehicle weight, the batteries should always have enough stored energy to allow the e-bus to reach its destination conveniently. Normally, the vehicle charges through normal charging at the depot at night, and fast charging solutions must be available on a journey path (OppCharge). Due to the limited stopping/parking time during the journey, OppCharge is a fast-charging solution. Fast-charging solutions minimize the needed battery capacity, which minimizes the onboard vehicle weight and thus optimizes the operational cost.
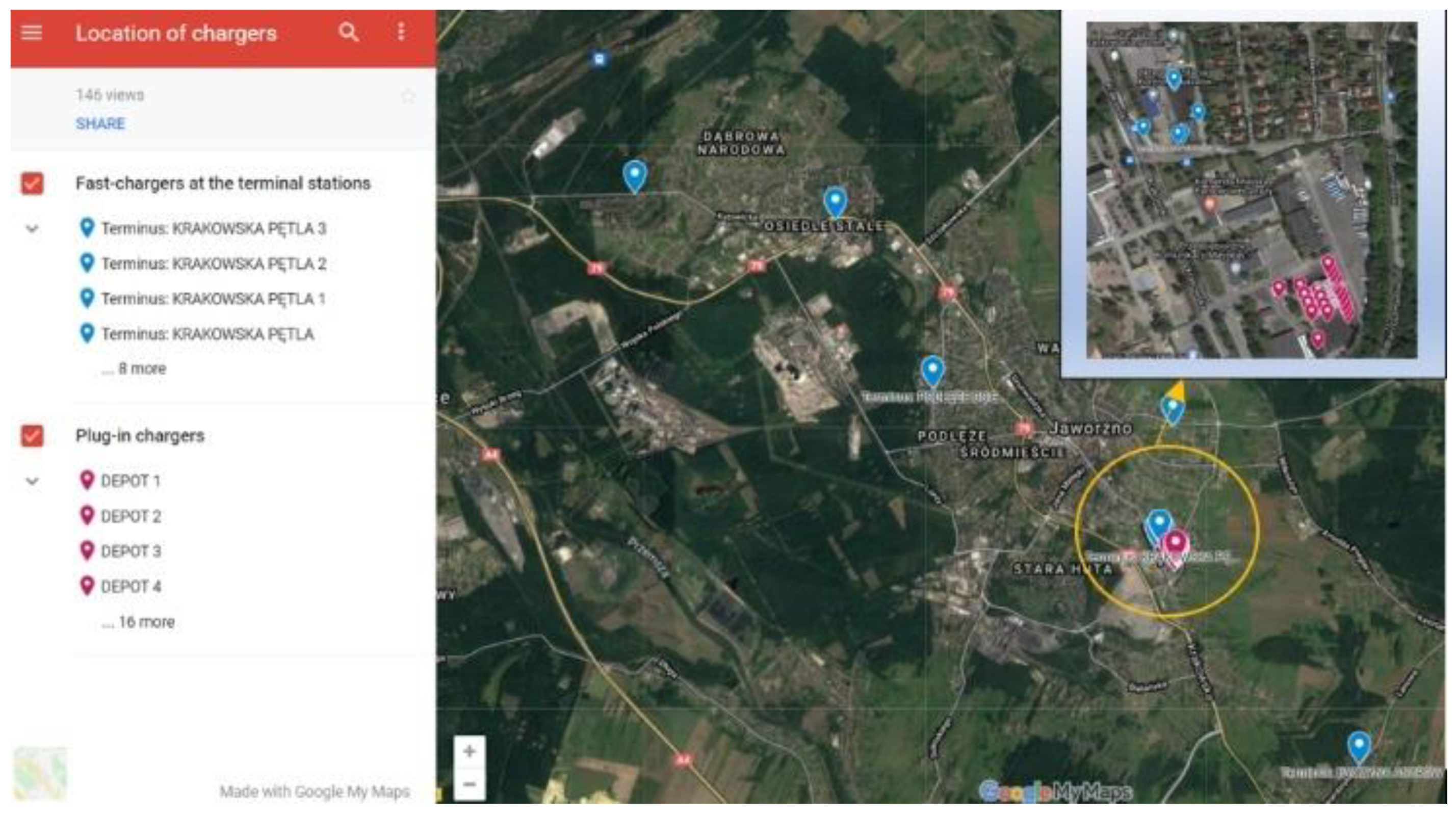
The Jaworzno demo e-buses are equipped with two charging technologies: plug-in and a pantograph. In Jaworzno, there are 20 plug-in chargers located in the depot, and 12 pantograph chargers are allocated along the e-bus line paths, as can be seen in Figure 8, with a spot area (terminal station) of 20 plug-in chargers and 7 pantograph chargers connected to the same DSO connection point.
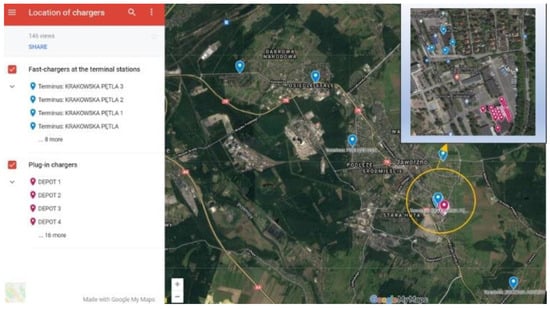
Figure 8.
Charging infrastructure map in Jaworzno. The red spots represent the depot charging, the blue spots represent the fast-charging solutions.
2.4.1. Depot Charging
Depot charging allows e-buses to be connected and charged while parked at the e-bus depot (PKM depot). The vehicles are connected to charging equipment typically using plugs and cables, but automated connection devices are also used in some depots. The energy transfer capacity depends on the power handling capacity of the cable and the connector connecting the charger to the vehicle. The charging concept aims to gently charge the entire e-bus fleet where the on-board battery of the e-bus is usually within a capacity range of 200–500 kWh.
The battery pack of an EV can only be charged by DC power. The power source available from the grid is AC and hence needs to be converted to DC before it reaches the battery pack. In the case of an AC charge point, the AC is converted to DC by equipment in the vehicle (on-board charger). Space and weight considerations tend to limit the power of chargers built into the vehicle. The DC charging points convert AC to DC outside the vehicle and thus bypass the onboard charger. A DC charging point is not limited to any significant degree by space or weight, meaning that it is able to accommodate much higher charging currents and the charging times for the batteries can be much shorter compared to AC charging. In addition to high-power DC chargers, there are also low-power DC depot chargers available on the market.
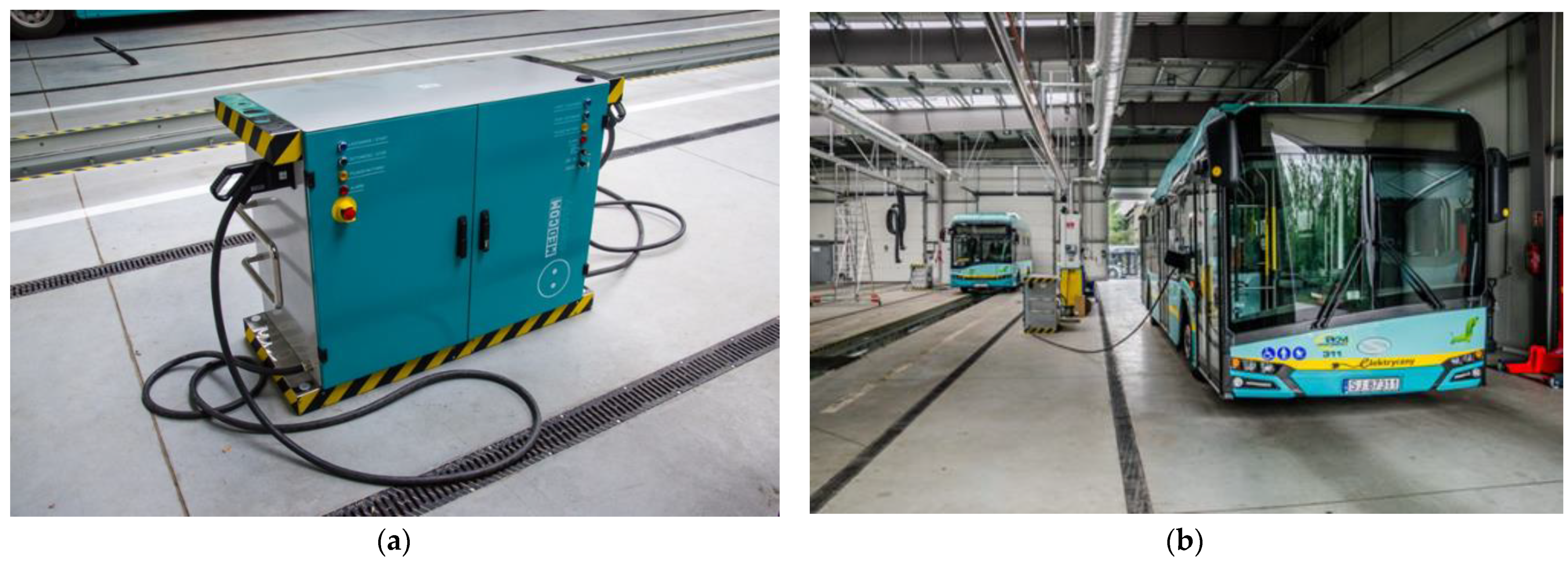
In the PKM depot charging station, there are 20 plug-in charging stations. These chargers are supplied from the utility supply with AC voltage 3-phase 400 V, 50 Hz. The power is converted into DC with a charging voltage range of 500–800 V (see Figure 9). Each charger has two output ports. The effective charging power is 120 kW if the charger is used to charge one e-bus, or 60 kW if the charger used to charge two e-buses simultaneously. The charging interface is the Phoenix Contact plug-in, CCS Type 2, Mode 4, according to the IEC62196 standard. The depot charger characteristics are listed in Table 4.

Figure 9.
A depot plug-in charger. (a) plug-in charger with two output ports, (b) 12 m bus connected to be charged.
Table 4.
Charger characteristics: CCS Type 2.
2.4.2. Pantograph Opportunity Charger
In opportunity charging, the vehicle is connected to the high voltage charging equipment with the help of an ACD, typically a pantograph. When the vehicle reaches the charging location, the ACD starts the charging setup. The communication between the vehicle and the charging equipment is set by means of power line communication (PLC) or Wi-Fi, depending on the type of ACD. The energy transfer is done in few minutes with the help of control devices and electronics that are gathered in a heavy-duty cabinet placed in suitable housing. Underground cabling connects it to the pylon where the charging contact device (ACD) is mounted.
In Jaworzno, there are 12 pantograph fast-charging solutions with Type B technology dispersed along the e-bus routes in such a way that the e-buses can reach their destination conveniently.
The pantograph chargers are connected to the AC utility supply of voltage 3-phase 400 V, 50 Hz with a connection power of 320 kVA and effective charging power of 300 kW. The charging platform was supplied by Schunk (see Figure 10). The pantograph charger characteristics are listed in Table 5.

Figure 10.
Pantograph charging solution in Szpital Pętla.
Table 5.
Pantograph charger characteristics.
3. e-Bus Fleet Impact on the Power Grid
EV integration has increased enormously in the past few years. Generally, EVs’ impact on the grid depends on the grid infrastructure. In some grids, a 20% EV penetration has no impact on the DSO networks. On the other hand, some grids tolerate no more than 10% uncoordinated load charging, which could reach 40% in the case of coordinated charging [1,11]. In reality, it appears that every DSO grid is a special case requiring an autonomous study to explore the issues and limits of EV charging load [11]. In some countries like the Netherlands, EV integration reaches the limit in most of the DSO connection points [12,13,14]. In the ASSURED project, among several demos, there are more than 43 HD e-buses integrated in the Eindhoven demo, which will be upscaled to 200 HD e-buses [9]. Smart charging, besides RES, is a promising solution to address the congestion in the DSO grid and maintain the reliability and security of supply with some financial benefits, which could be a motivation to adopt this technology. In [15], a demo in the Netherlands focused on the impact of EVs on the electricity network and the possibility to use RES as much as possible while keeping the energy grid in balance.
In this work, the single-phase subsystem was simulated based on the pandapower library in Python software to examine various factors that affect the charging infrastructure on the system capacity and the ability to host the EVs’ loads. The e-buses were simulated as variable loads based on SoC. The findings of this use case study, as reported in this paper, can be used as signals to forewarn utilities on asset management, system planning, and boundaries of acceptable operation [11].
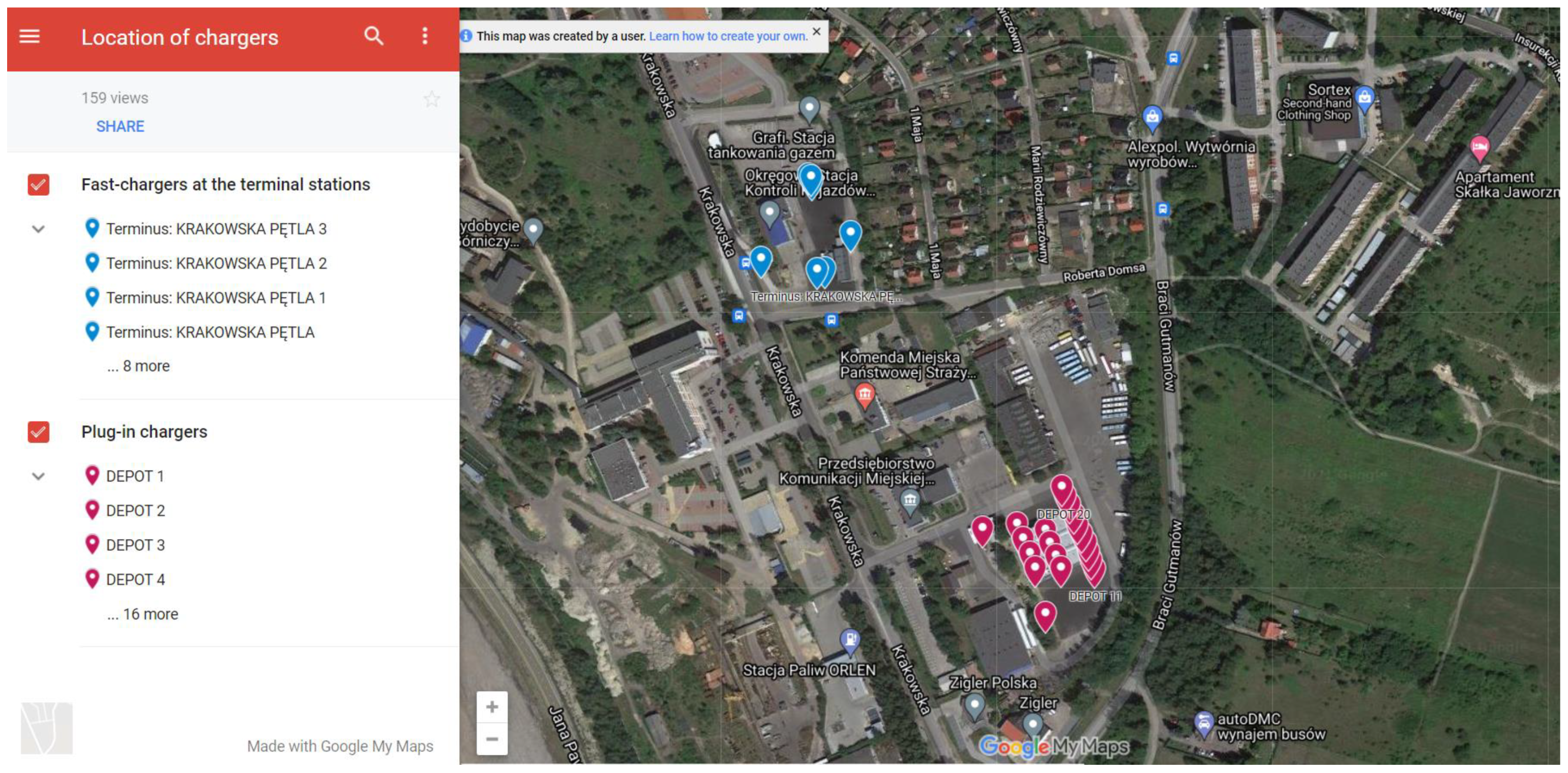
In order to show the impact of conventional normal charging and fast charging on the DSO grid, a small spot (terminal e-bus stop) that includes both charging solutions (see Figure 11) was modeled and simulated. This spot area had 20 plug-in charging solutions and 7 pantograph charging stations with a distance between them of less than 350 m.
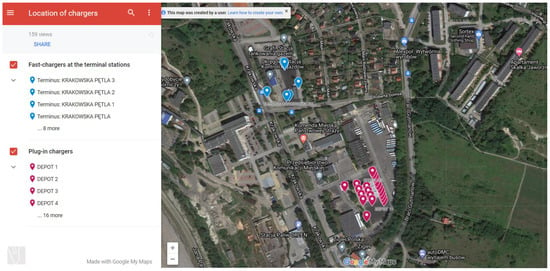
Figure 11.
The red spots represent the depot charging, the blue spots represent the fast charging solutions.
In this study, multiple scenarios were modeled and evaluated. These scenarios were separated into two main categories: uncoordinated charging (standard charging) evaluation and coordinated charging (smart charging) evaluation. For the large-scale evaluation, the grid was evaluated for different charging scenarios. The load profiles of the e-buses were based on real data measurements.
Since both charging solutions operate with a minimum power factor of 0.9, the reactive power was assumed in a simulation of 10% of the active power. The active power varied between 70 and 130 kW for the plug-in charging solution, and for OppCharge, the active power varied between 200 and 320 kW. Accordingly, the reactive power varied between 7 and 13 kVAR for plug-in charging, and for OppCharge, the power change varied between 20 and 32 kVAR.
Two scenarios were investigated here. Scenario 1 was based on uncoordinated charging, which includes depot and pantograph charging solutions, and Scenario 2 included coordinated charging based on the depot charging solution. Depot charging happens when the e-buses parked for several hours, usually at night. Pantograph charging usually happens when the e-buses are stopped for short time, 5–7 min for passenger collection or a bit longer according to their working schedule.
3.1. Uncoordinated Charging (Standard Charging)
Uncoordinated charging is where e-buses connect to the charger to be charged with the maximum allowed power by the connector/charger until fully charged (100% SoC) without taking into account the number of e-buses that are connected simultaneously to the chargers and their impact on the grid infrastructure. In the case of a high number of e-buses connected to be charged simultaneously, there would be a high impact on the grid in terms of the voltages on the bus bars, DSO transformer load profile, and line rating. In addition, uncoordinated charging has an impact on the operational cost of the e-buses since the energy price in peak loads is higher than the price in off-peak hours according to the DSO grid load profile. Furthermore, as a high peak achieved, the distribution capacity price increases accordingly, as mentioned in Equation (1).
Distribution capacity price = peak power reached in the month (kW) × constant factor (EUR/kW)
3.1.1. Depot Charging Scenario
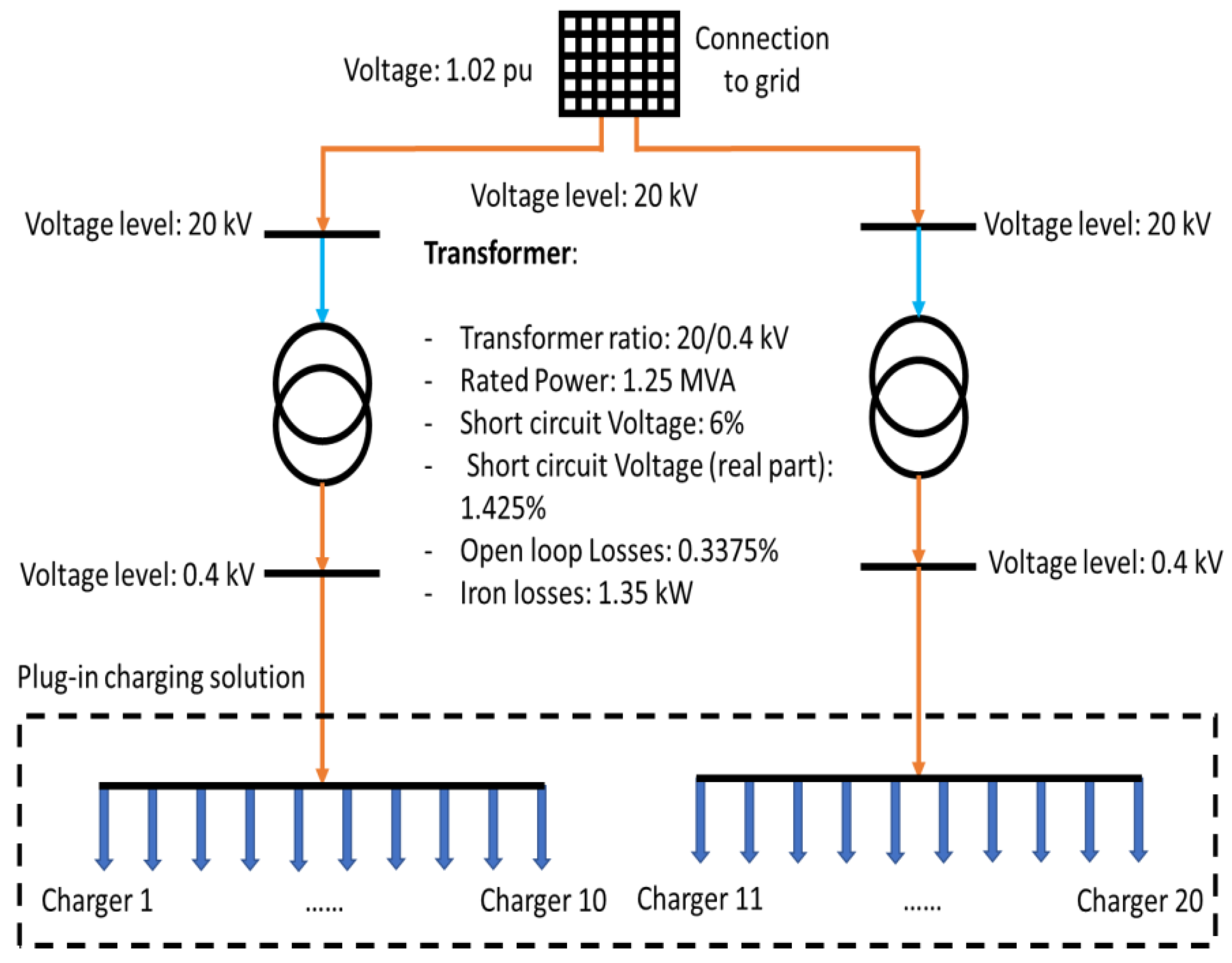
In the depot of the e-bus fleet, there are 20 plug-in chargers. These chargers are connected to the grid in the way described in Figure 12. The blue lines in Figure 12 were modelled as power transmission lines “NAYY 4 × 50 SE.” The transformer parameters are also shown in the figure.
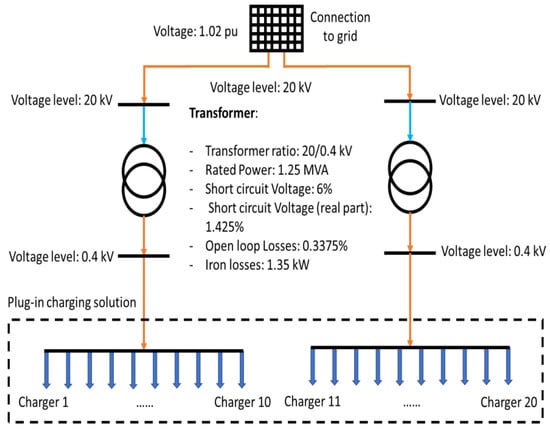
Figure 12.
Modeling of the chargers connected to the DSO grid.
In this scenario, four integration charging profiles were considered, which were 25%, 50%, 75%, and 100% of the e-buses, which corresponds to 5, 10, 15, and 20 EV chargers, respectively. The simulation aimed to reveal the impact on the DSO grid. The impacts include the bus bar voltage variation, and transformer load profile.
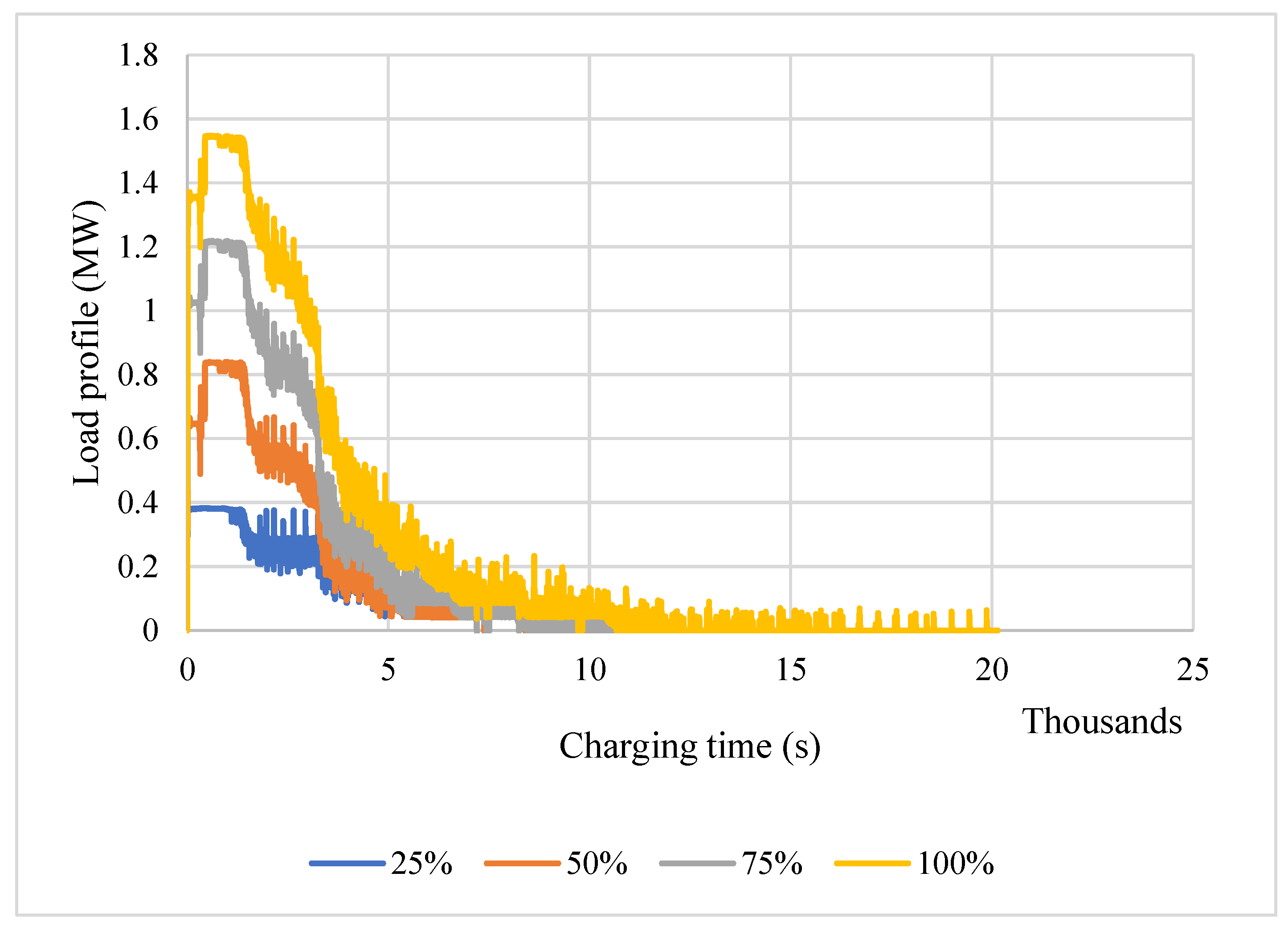
The real data of the load profile were simulated for various integration rates of e-buses to investigate the impact of the e-bus integration in the DSO grid. The load data are shown in Figure 13. This figure also shows the impact of the e-buses on the transformer and transmission loading profiles, where the transformer loading profile and line ratings increase at the same rate as the e-bus load profile. Besides the residential loads, the load of the transformer could reach its critical limits. For the transmission lines, the single contingency (N-1) could be lost.
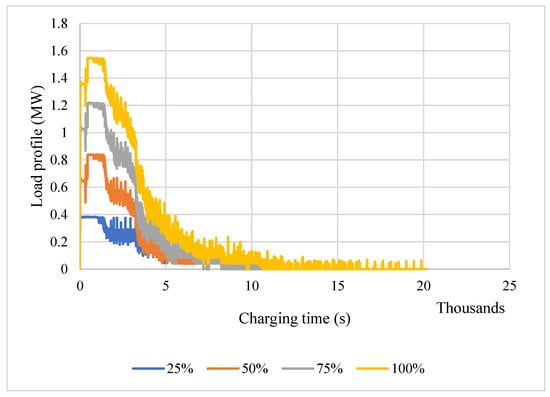
Figure 13.
Load profile data for various integration rates of e-buses.
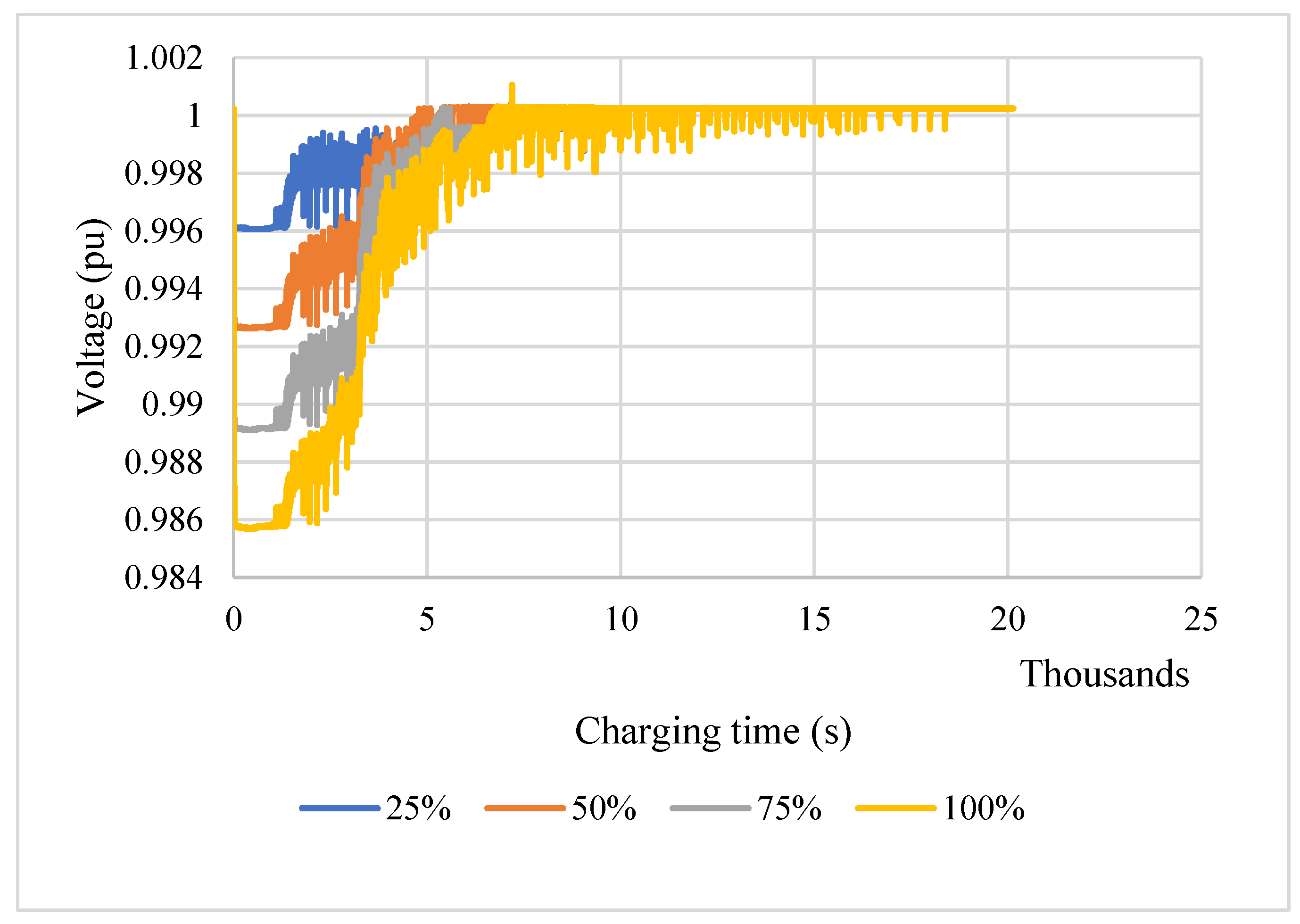
The e-buses’ impact on the bus bars voltage profile is shown in Figure 14, and as can be seen, as the e-bus integration increases, the voltage of the bus bars declines, although the chargers are equipped with power factor compensation to limit the reactive power to a maximum of 10% of the active power. As can be seen, since the charging is uncoordinated, where the e-buses connect to the grid without taking into consideration the other factors, the voltage drop at the beginning is high, and then gradually decreases back to its normal value when all e-buses finish their charging.
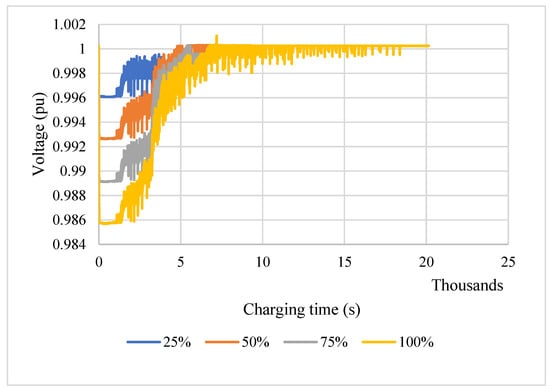
Figure 14.
Impact of conventional e-bus charging on the voltage profile of DSO bus bars.
3.1.2. OppCharge Scenario
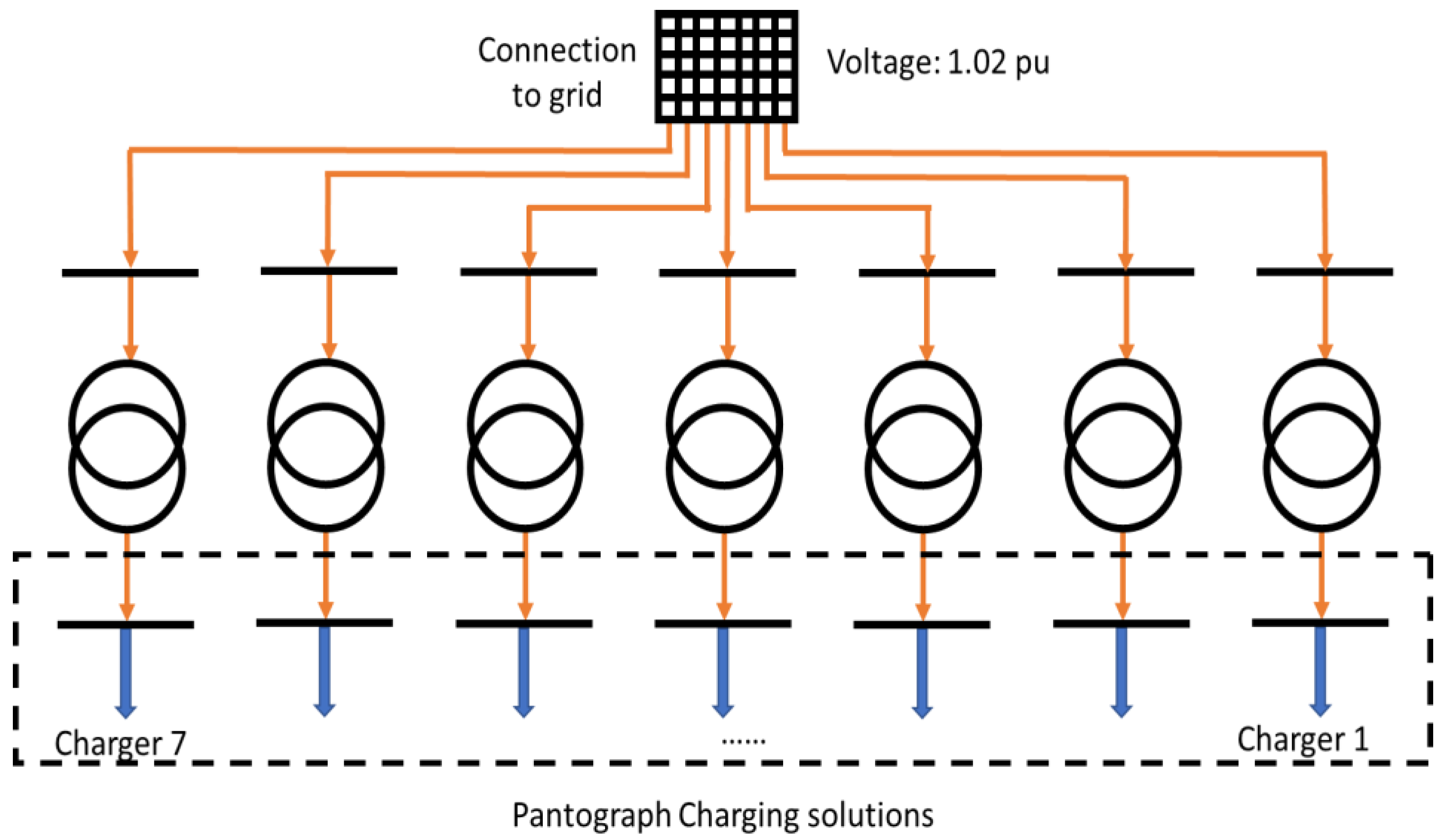
There are 12 pantograph charging solutions dispersed in Jaworzno for e-bus fast charging. As can be seen in Figure 11, 7 out of 12 are in the same spot. These 7 chargers are connected to the same DSO transformer. These charging solutions were modeled (Figure 15) and simulated to investigate the impact of the fast-charging solution on the grid.
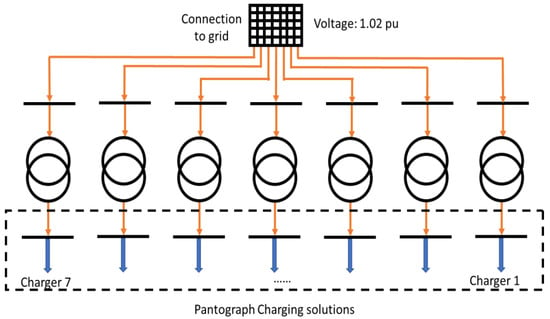
Figure 15.
Pantograph fast-charging model connected to the grid.
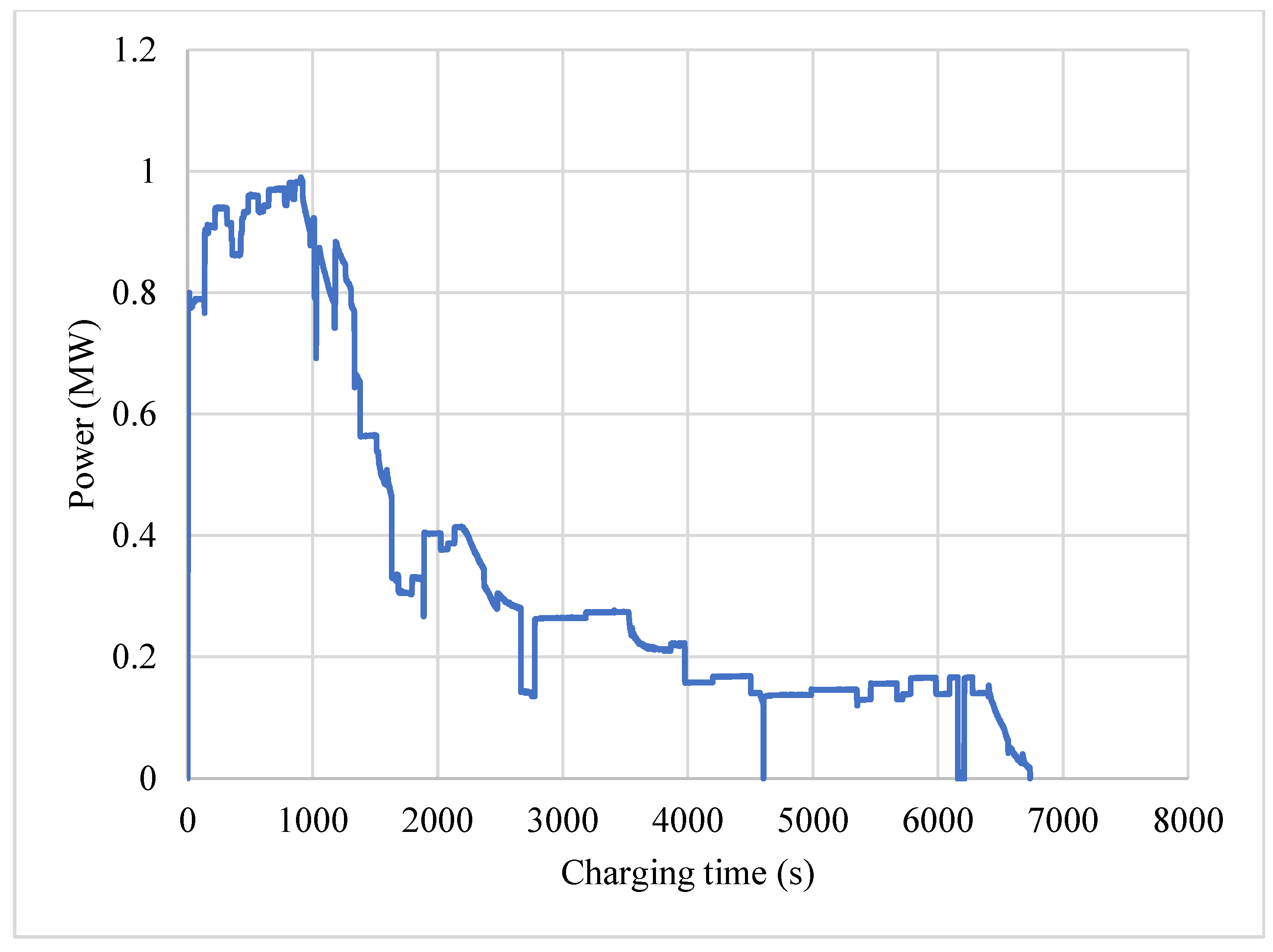
The real data of 7 e-bus charging loading profiles (see Figure 16) were simulated to study the impact of a fast-charging solution for e-bus fleet integration on the DSO power grid. This figure also shows the impact of the e-buses on the transformer and transmission line loading profiles.
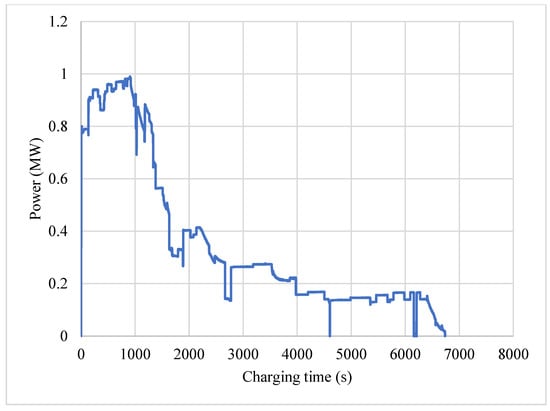
Figure 16.
Data of the load profile of e-buses based on the FC pantograph solution.
Comparing Figure 16 to Figure 13 for plug-in charging solutions, only 7 pantograph fast-charging solutions could have an impact on the grid, almost the same as 15 plug-in charging solutions (75% e-bus integration). That means that the single pantograph charging solution has an impact on the grid equivalent to almost two plug-in charging solutions. As can be observed from Figure 16, when all vehicles are connected to the grid simultaneously, the loading on the DSO transformers and transmission lines is high and would have an impact on the grid infrastructure, and possibly the reliability of the supply as well. The impact on the grid decreases slightly as some vehicles finish their charging before others mainly due to differences in battery SoC.
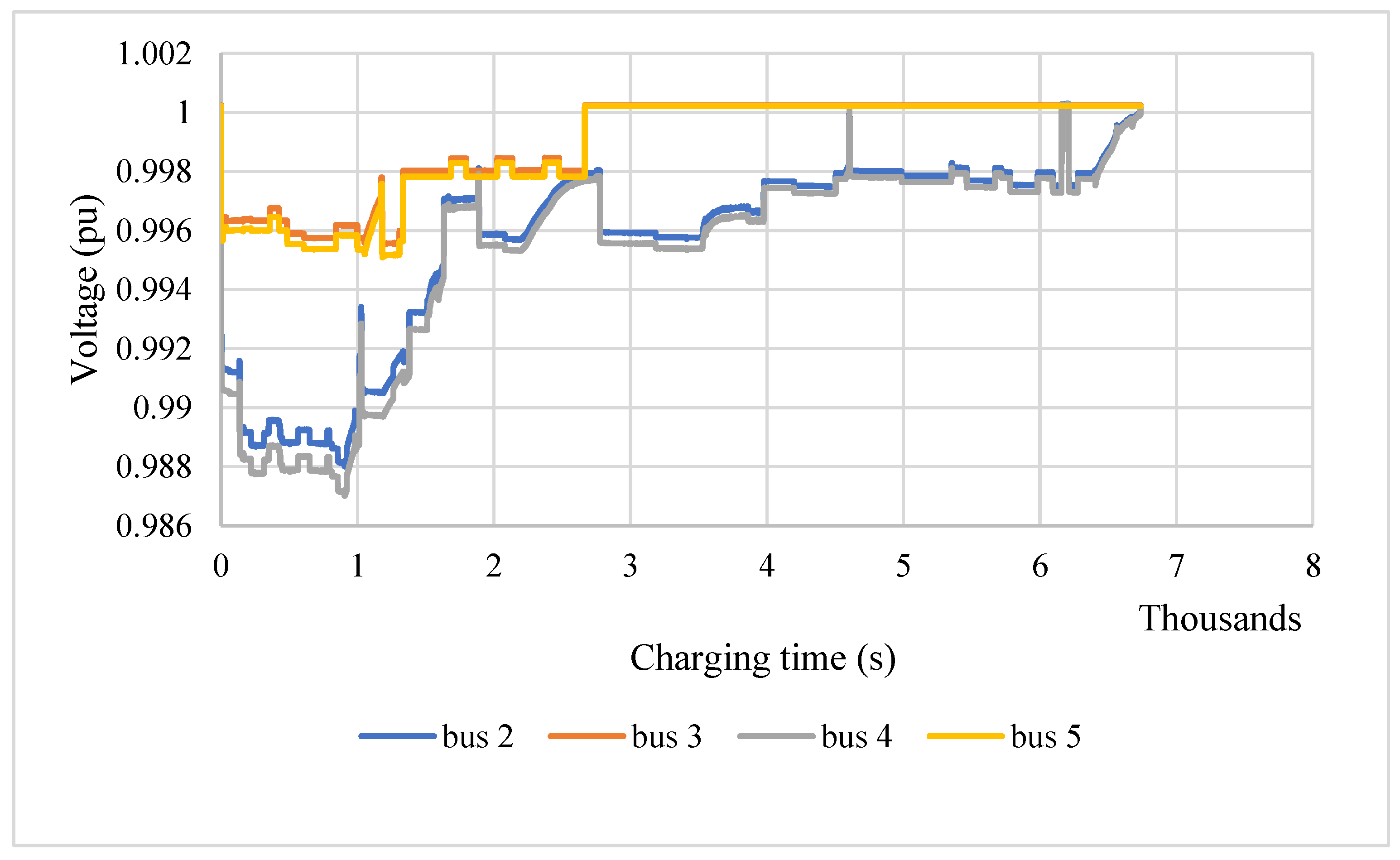
The impact of e-bus fleet integration on the bus bar voltage profiles was studied (see Figure 17). The voltage profiles for some bus bars are presented. The results show that the impact on the bus bar voltage profile for 7 pantograph charging solutions is quite similar to the 15 plug-in charger solutions (75% integration). As can be seen in Figure 17, e-buses that consume less power from the chargers have less impact on the bus bar voltage profile than the e-buses that consume more power.
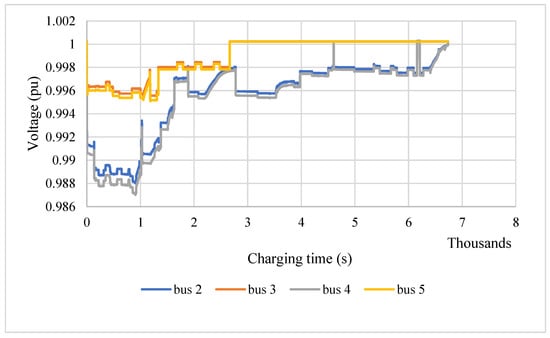
Figure 17.
Impact of e-bus fast charging on the voltage profile of the DSO bus bar.
3.2. Coordinated Charging (Smart Charging)
Smart charging of e-buses could be done based on load shaving, which mainly depends on the shift of e-bus charging in order to minimize its impact on the DSO grid. This could easily be done based on the e-bus fleet management system and the eSConnect device, which is installed in the e-buses. Based on the data collected by this device, we could know the number of e-buses connected simultaneously to the chargers, the driving patterns, and the current SoC of the e-buses to estimate the needed charging time and power, and then manage the power level and number of e-buses connected to the grid in order to minimize their impacts.
The aim of smart charging is to flatten the load profile. This practice offers direct and indirect benefits to the DSO utilities in generation of costs, line and transformer loss reduction, and voltage support. Form the EV owners’ perspective, it could increase revenue by providing ancillary services to the grid, optimizing the consumption, minimizing the electricity bill, etc.
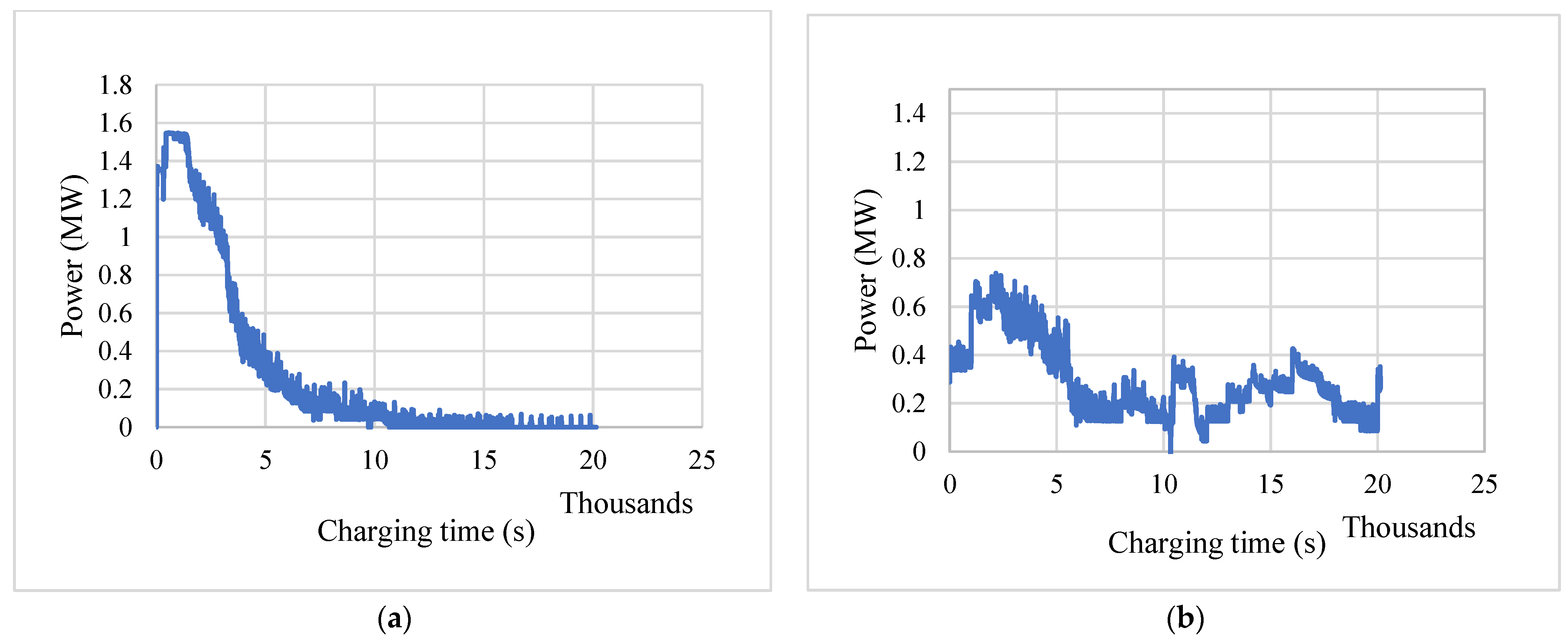
In this section, real data were used to simulate smart and standard charging with 100% e-bus integration in the PKM depot charging station. The uncoordinated/standard charging load profile is shown in Figure 18a, and the same data we used for coordinated charging with load shifting are shown in Figure 18b. Based on both figures, in the case of uncoordinated charging, there is a peak and valley of the load profile. This results in a huge impact on the grid during a period of time and no impact during a different period. To minimize the impact on the grid, coordinated/smart charging could be adopted, where the e-buses connect to the grid to be charged and take into account the other factors that have an impact on the grid.
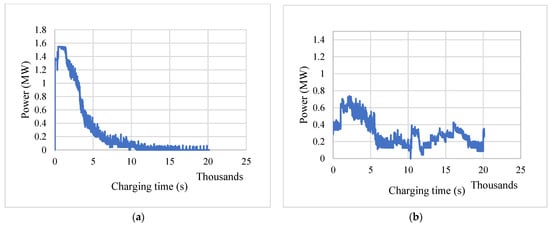
Figure 18.
Charging load profiles: (a) standard charging, (b) smart charging.
The load profile data for 20 plug-in chargers in the PKM depot charging station were used for coordinated charging simulation, as shown in Figure 18b. This figure shows how the charging load profile could be coordinated to lessen the impact on the grid by flattening the load profile instead of having some peaks and valleys. In the uncoordinated charging, the e-buses connect to the depot chargers to be charged without taking into consideration the number of e-buses connected to be charged at the same spot, the load of the DSO transformers, or the line ratings. As we can see, the load reaches a peak in one region of the figure and diminishes in the other regions. Such an approach could increase the stress on the grid. In order to minimize the impact of the e-bus fleet integration on the grid, coordinated smart charging could be adopted.
In coordinated smart charging, the e-buses load profiles are distributed almost evenly. In reality, this could be done by shifting the charging of the e-buses in a way that takes into consideration the transformer and line load profiles, and could also be done by decrease the charging power, which prolongs the charging time while taking into consideration the user comfort, which includes the charging period and targeted SoC. In this study, as can be seen in Figure 18b, smart charging was adopted by shifting the charging of some e-buses that were parked for a longer time and giving charging priority to other e-buses parked less time.
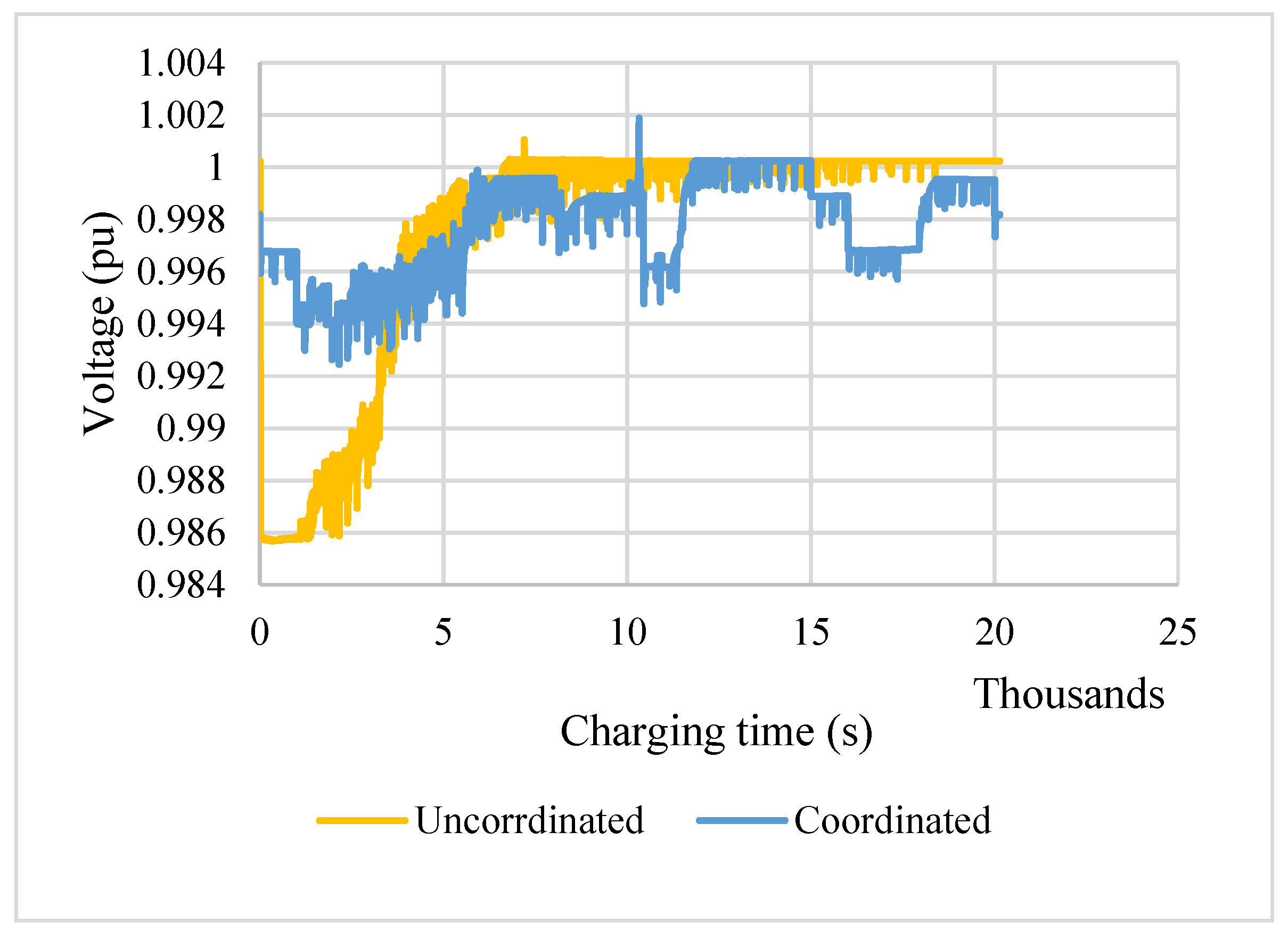
A simulation based on the pandapower Python package was carried out. This scenario included real data from the e-bus fleet in the depot charging station. The results are shown in Figure 19. The data for the uncoordinated and coordinated charging are the same, with load shaving for coordinated charging.
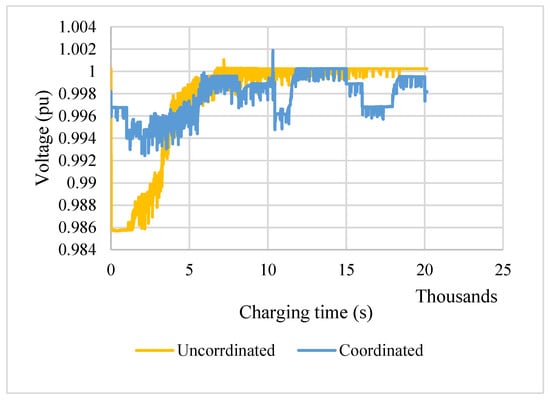
Figure 19.
An e-bus fleet integration of 100% in depot charging based on uncoordinated and coordinated charging.
As can be seen in Figure 19, for coordinated charging, the peaks and valleys of the voltage profile curve are eliminated and the voltages on the bus bars are supported.
4. e-Fleet Demo Operation
4.1. Technical Operation
In this section, several aspects are discussed from the vehicle operation point of view based on the NC and FC technologies. Based on the idea of real operation provided by original equipment manufacturers (OEMs), the three types of e-buses in the Jaworzno demo are presented to study the demo operation from the technical and economical point of view.
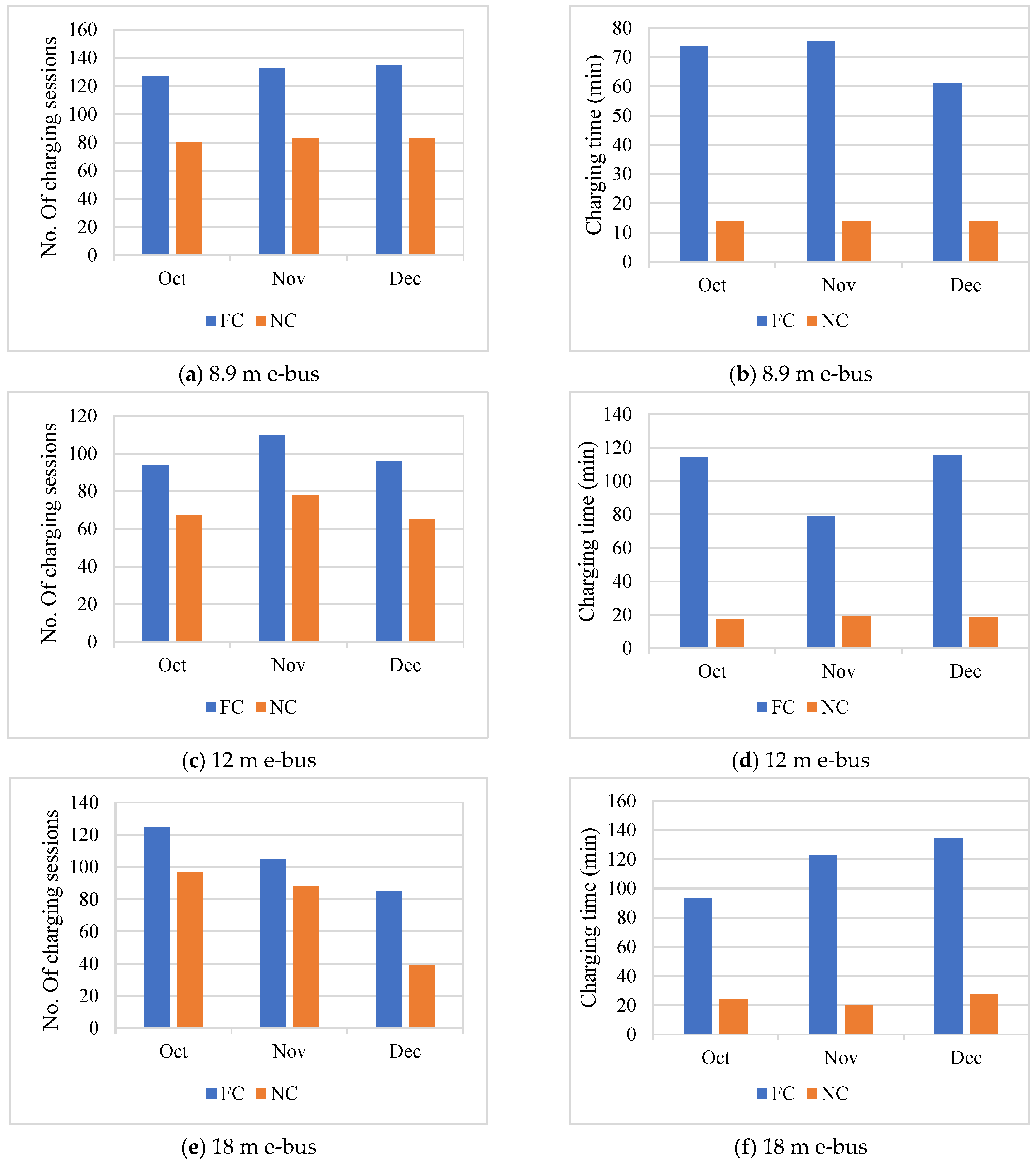
The charging time is the key factor to distinguish between NC and FC, besides the charging power level. This factor has an impact on the e-bus operational fleet and its routes, where according to the PKM e-bus operator, changes to the e-buses routes have been used as a kind of operational cost optimization. The charging time also depends on the capacity of the battery pack. Under the same charging conditions, the battery pack with higher capacity charges slower than the batteries with lower capacity. Some of the statistical data analysis is presented in Figure 20. Normally, if the e-buses need to be charged, they stop for around 6 min at a bus stop and charge based on the pantograph FC solution.
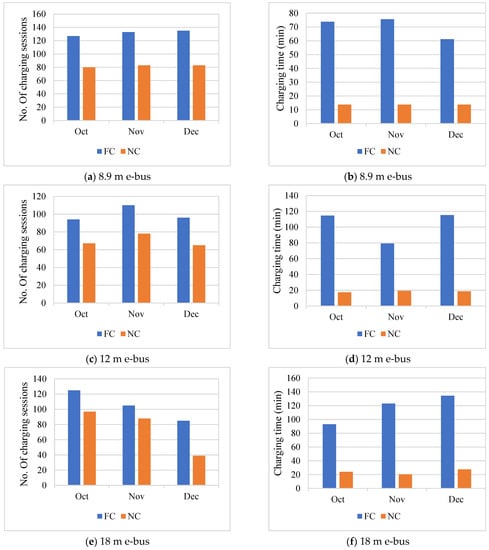
Figure 20.
Number of NC and FC sessions and their corresponding average charging time.
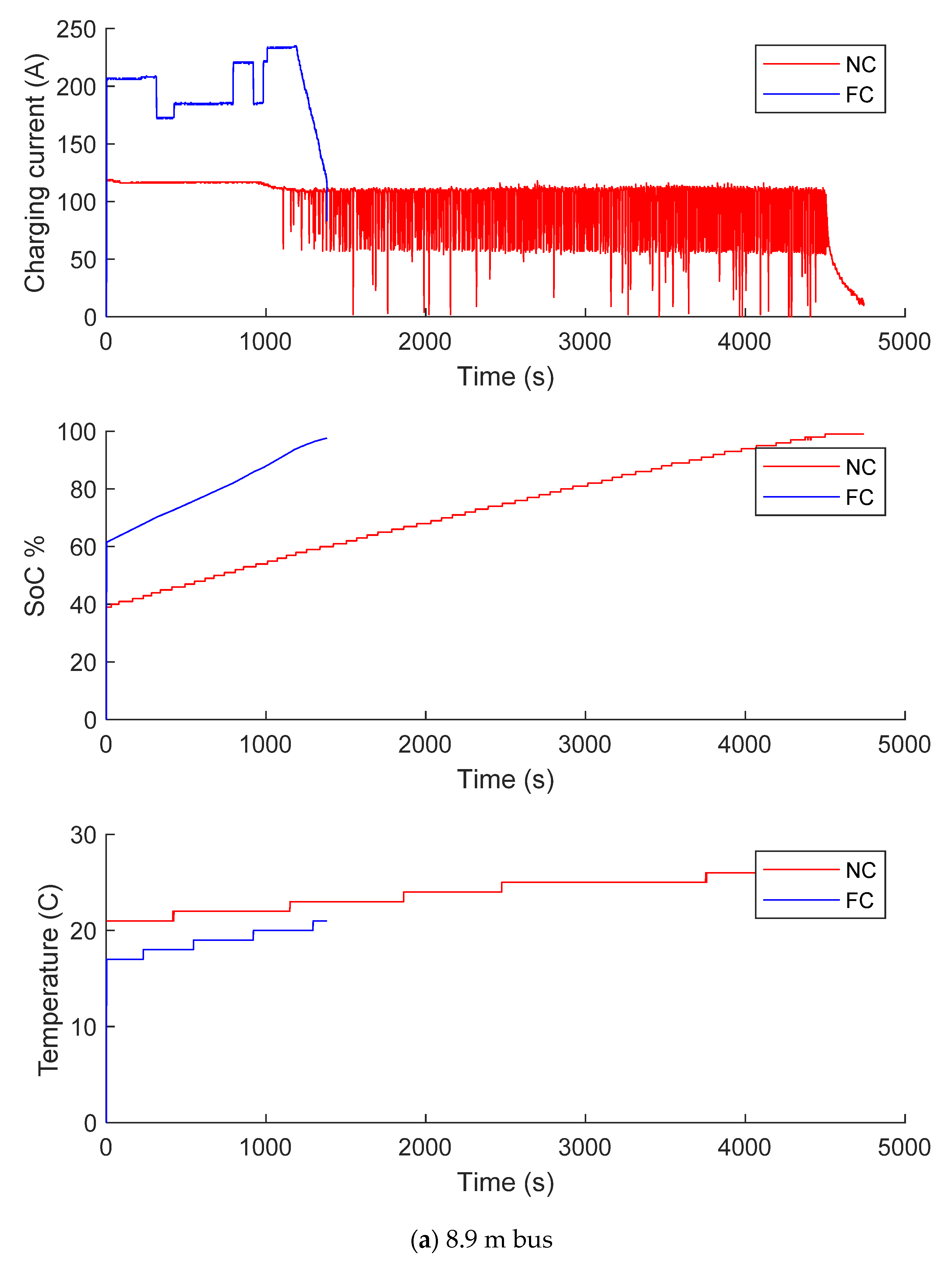
As can be seen in Figure 20, the e-bus operator adopts the NC as much as possible, due to its lower operational cost, lower impact on the battery performance, and lower impact on the grid. Furthermore, the use of NC is close to that of FC, thanks to the braking system that recuperates some energy that supports e-bus battery operation. In the NC 8.9 m e-bus, the average charging time is between 60 and 75 min; for the 12 m e-bus, the average charging time is between 80 and 120 min; and for the 18m e-bus, the average charging time is between 85 and 120 min. For FC, the average charging time for all e-buses is only around 10 min. The charging current of NC and FC was also studied, as was their corresponding impact on the battery SoC and temperature (see Figure 21).
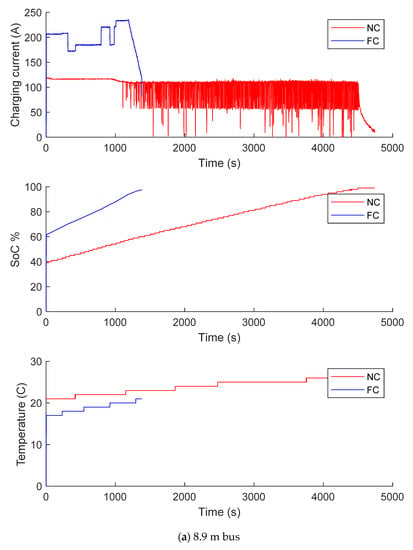
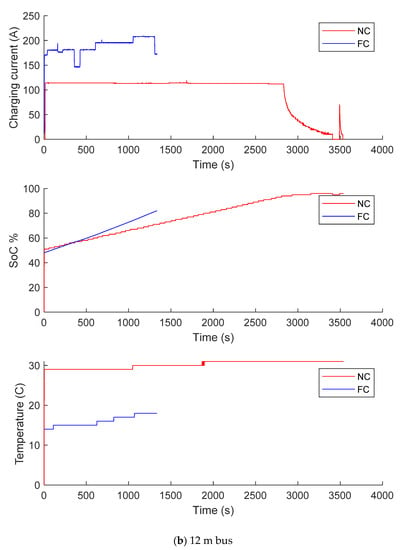
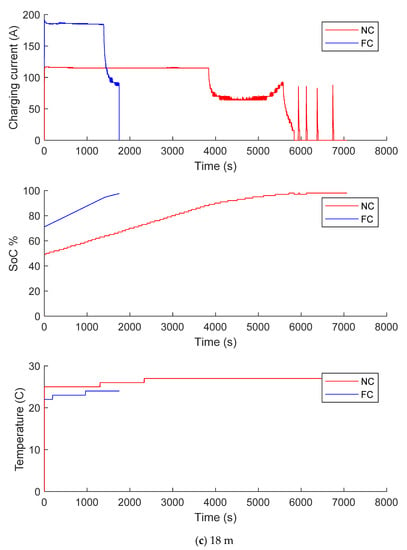
Figure 21.
Impact of the FC and NC charging modes on battery SoC and temperature.
The Li-ion batteries work within specific ranges of temperature. These ranges are defined based on several factors. Beyond the temperature operating range, the batteries work with less efficiency, which has an impact on the battery aging and could be lead to battery failure in some cases. Accordingly, the thermal management of EV batteries is critical in order to keep the battery temperature within the accepted operational limits.
Figure 21a shows the impact of the NC and FC charging modes on battery SoC. As can be observed, for an 8.9 m e-bus, the NC takes 79 min to increase the SoC from 38% to 99%, with an average current of 97A, which results in a battery temperature increase of 5 °C, i.e., from 21 °C to 26 °C. For the same e-bus in the FC condition, it takes 23 min to reach 98% of SoC from its initial value, i.e., 61%, with an average current of 197A, which results in a battery temperature increase of 4 °C i.e., from 17 °C to 21 °C. For NC, from the same data in the figure, it takes 51 min to increase the SoC from 61% to 98%.
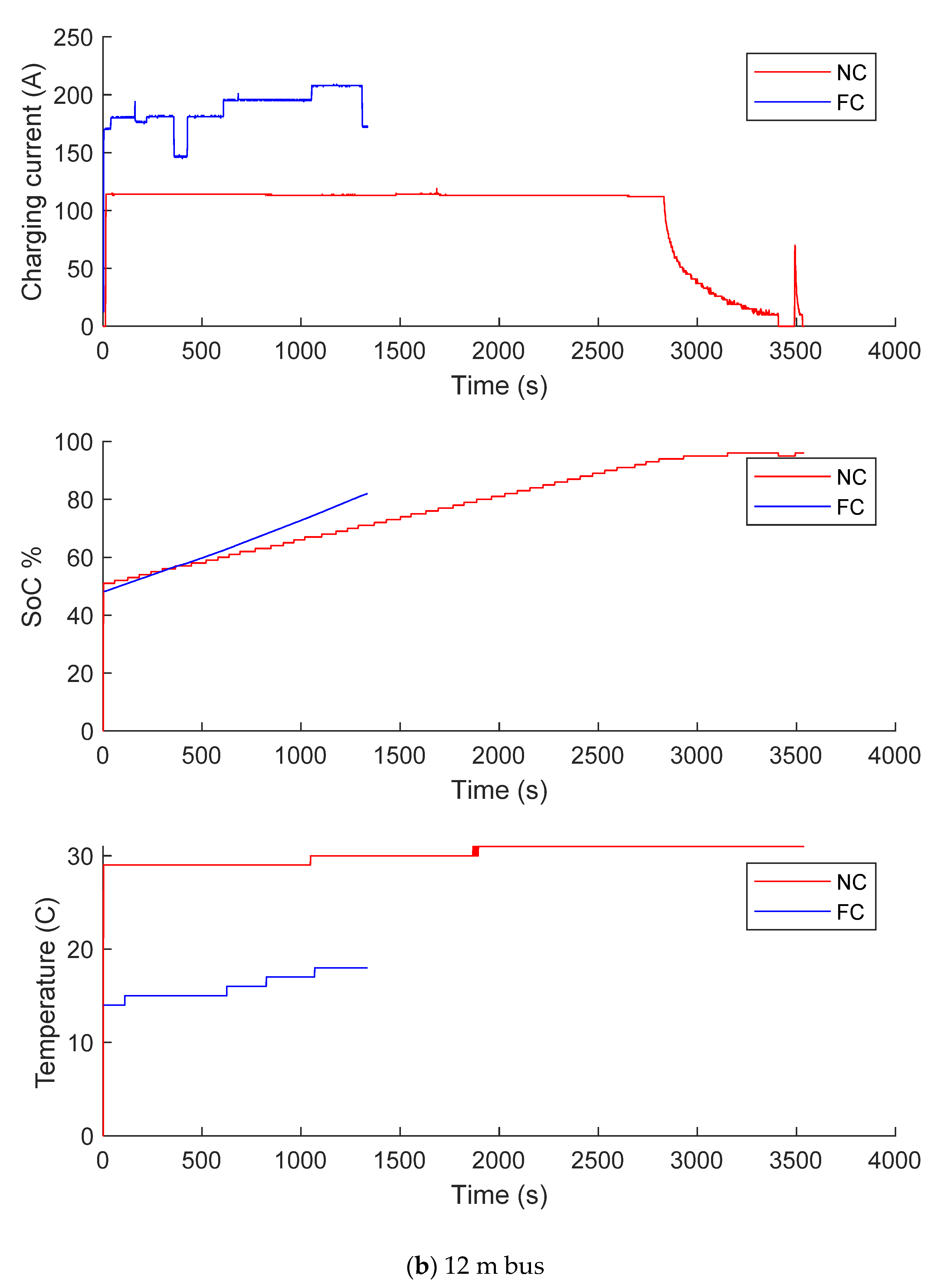
As can be observed in Figure 21b, for 12 m buses, NC takes 52 min to increase the SoC from 51% to 96%, with an average current of 95.5A, which results in a battery temperature increase of 2 °C, i.e., from 29 °C to 31 °C. For the same bus in the FC condition, it take 23 min to reach 82% SoC from its initial value, i.e., 48%, with an average current of 188A, which results in a battery temperature increase of 4 °C, i.e., from 14 °C to 18 °C, which means it takes 20 min to increase the SoC from 51% to 82%. For NC, from the same data in the figure, it takes 34 min to increase the SoC from 51% to 82%.
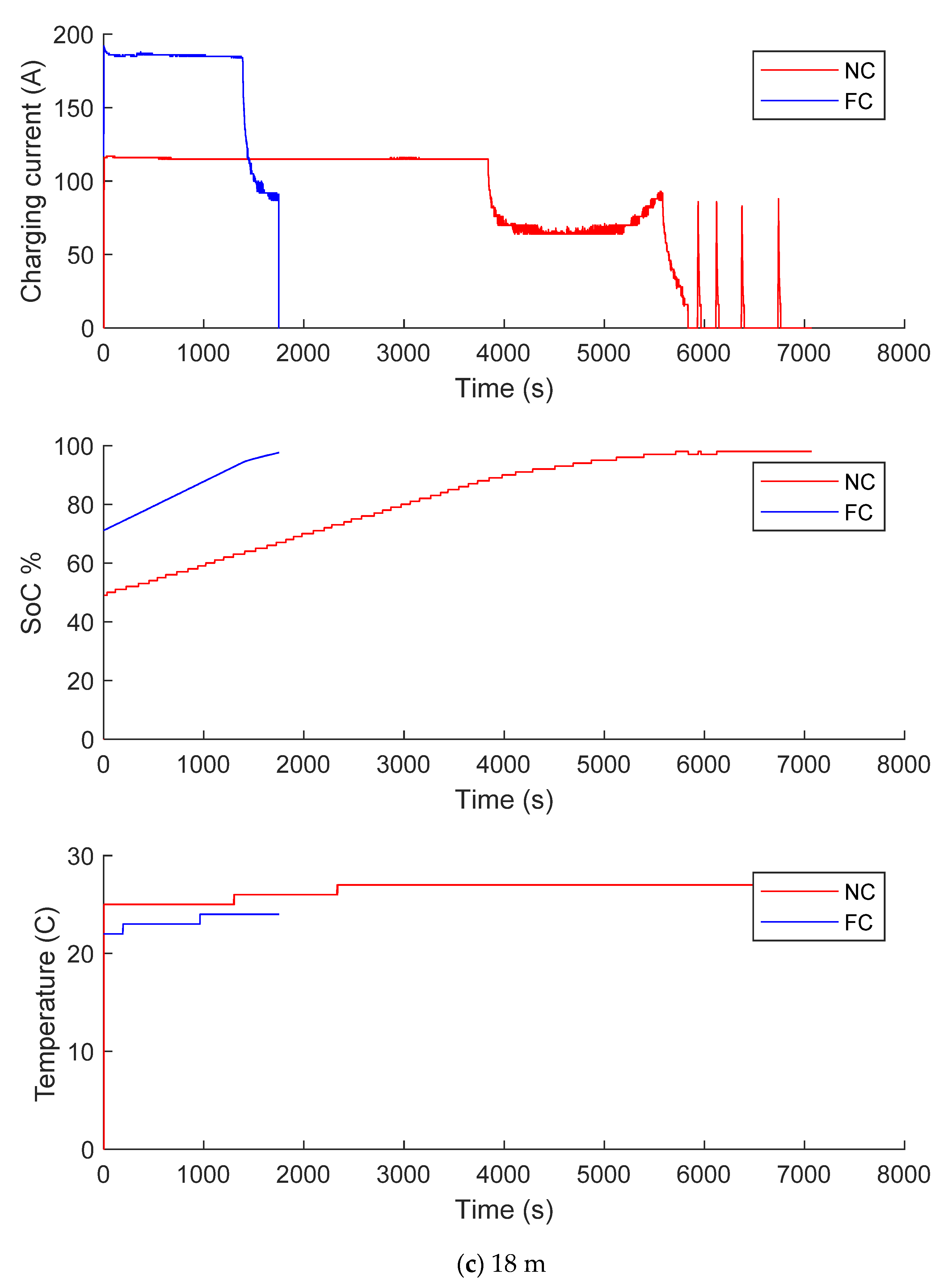
As can be observed from Figure 21c, for 18m e-busses, NC takes 118 min to increase the SoC from 49% to 98%, with an average current of 82A, which results in a battery temperature increase of 2 °C i.e., from 25 °C to 27 °C. For the same bus in the FC condition, it takes 29 min to reach 98% of SoC from its initial value, i.e., 71%, with an average current of 168A, which results in battery temperature increase of 2 °C, i.e., from 22 °C to 24 °C. For NC, from the same data in the figure, it takes 60 min to increase the SoC from 71% to 98%.
These results are useful for better understanding the charging time for both plug-in slow charging (or NC) and pantograph (FC) solutions in the project. The results are summarized in Table 6.
Table 6.
Comparison between NC and FC for some operational parameters, i.e., SoC, charging time, charging current, battery temperature.
As can be seen from the data in Table 6, when the charging current of the FC is almost double that of the charging current in the NC, the charging time is also almost half for almost the same SoC variation. In addition, the data show that FC has a slight impact on the battery temperature variation, thanks to the battery cooling system in e-buses, which is activated during FC. During NC, the temperature of the battery increases more than during FC.
In general, FC current is higher than 120A and that of NC is less than 120A. However, as the charging current increases, the charging time decreases and the battery temperature stays within the operational limits. A high charging current has an impact on the battery life, then on TCO.
4.2. Operational Cost and Optimization
In this section, the operational cost and adopted optimization measure in the e-bus fleet are described. The kWh price of energy is specified by the electricity supplier in Jaworzno. The operational cost mainly depends on the consumed power, which is pertinent to the vehicle mileage. Based on the data received from the logging devices within the e-buses, some samples of data related to the operational cost/consumption are presented in Table 7.
Table 7.
Analysis of energy consumption in three selected e-buses.
The kWh/km depends on the e-bus load (number of passengers) and the internal equipment consumption of the bus, which varies from one season to another based on the weather conditions. Generally, e-buses with more passenger capacity have higher consumption (higher operational cost) than ones with less passenger capacity, as can be seen from the data in Table 7. However, it can be assumed that the ratio of e-bus length to energy consumption is close to linear.
The currently adopted approach for operational cost optimization is using the braking system to recuperate some power to recharge the battery, which supports the SoC. In addition, the PKM bus operator uses changes to the e-buses routes as a way to optimize operational costs, wherein e-buses could change their routes based on the nearest path to reach the destination and change the line from one route to another with other buses. Furthermore, one of the methods of operational cost optimization used in the Jaworzno fleet is charging the e-buses as much as possible based on NC technology in off-peak load periods for the DSO grid, where the energy price is lower than at peak times. Such an approach not only optimizes the operational cost of the e-bus fleet but also optimizes the TCO since the FC has an impact on the battery lifetime. Furthermore, it has less/no impact on the grid, and some revenue could be obtained by providing this technique as an ancillary service to support the power grid stability.
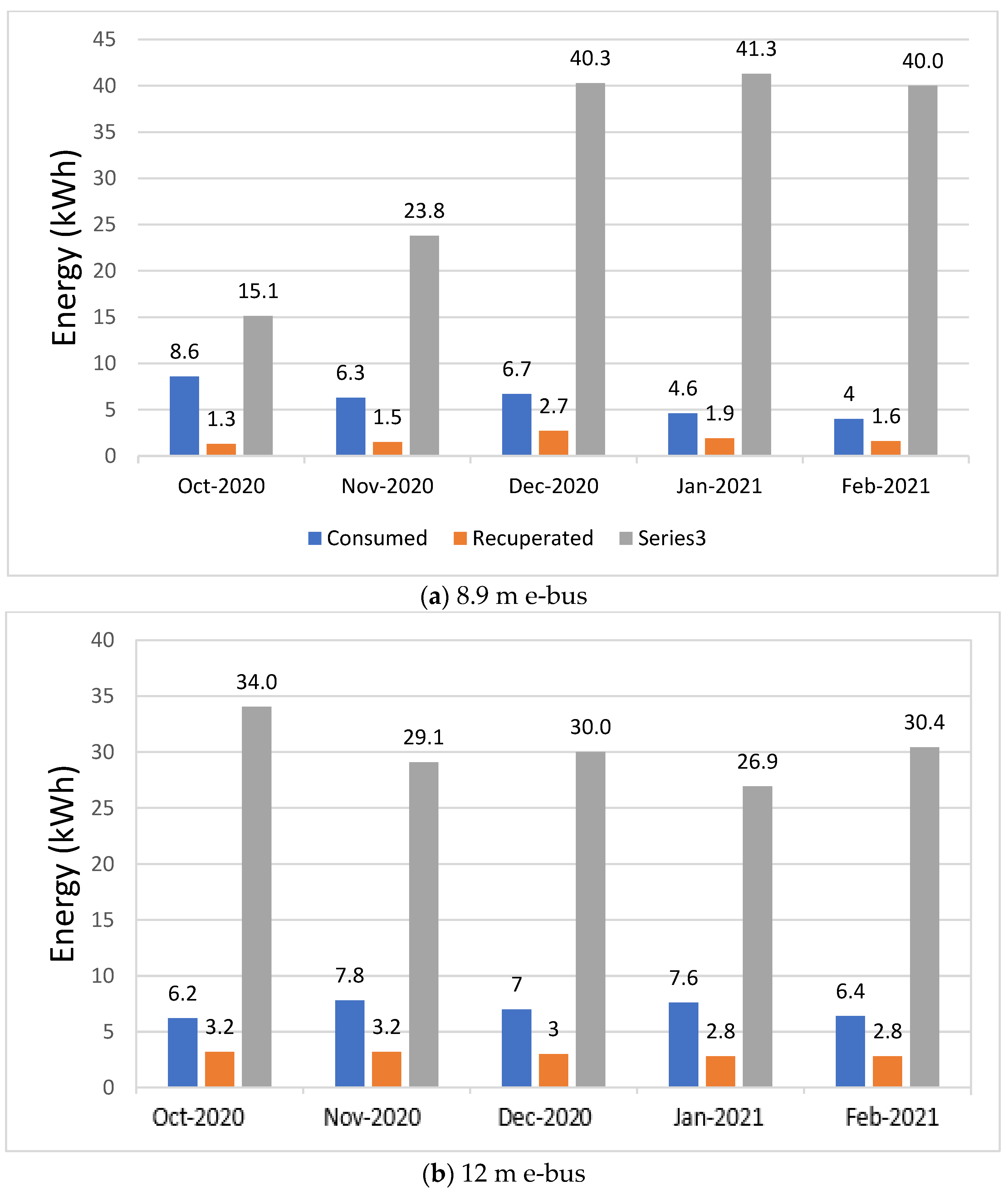
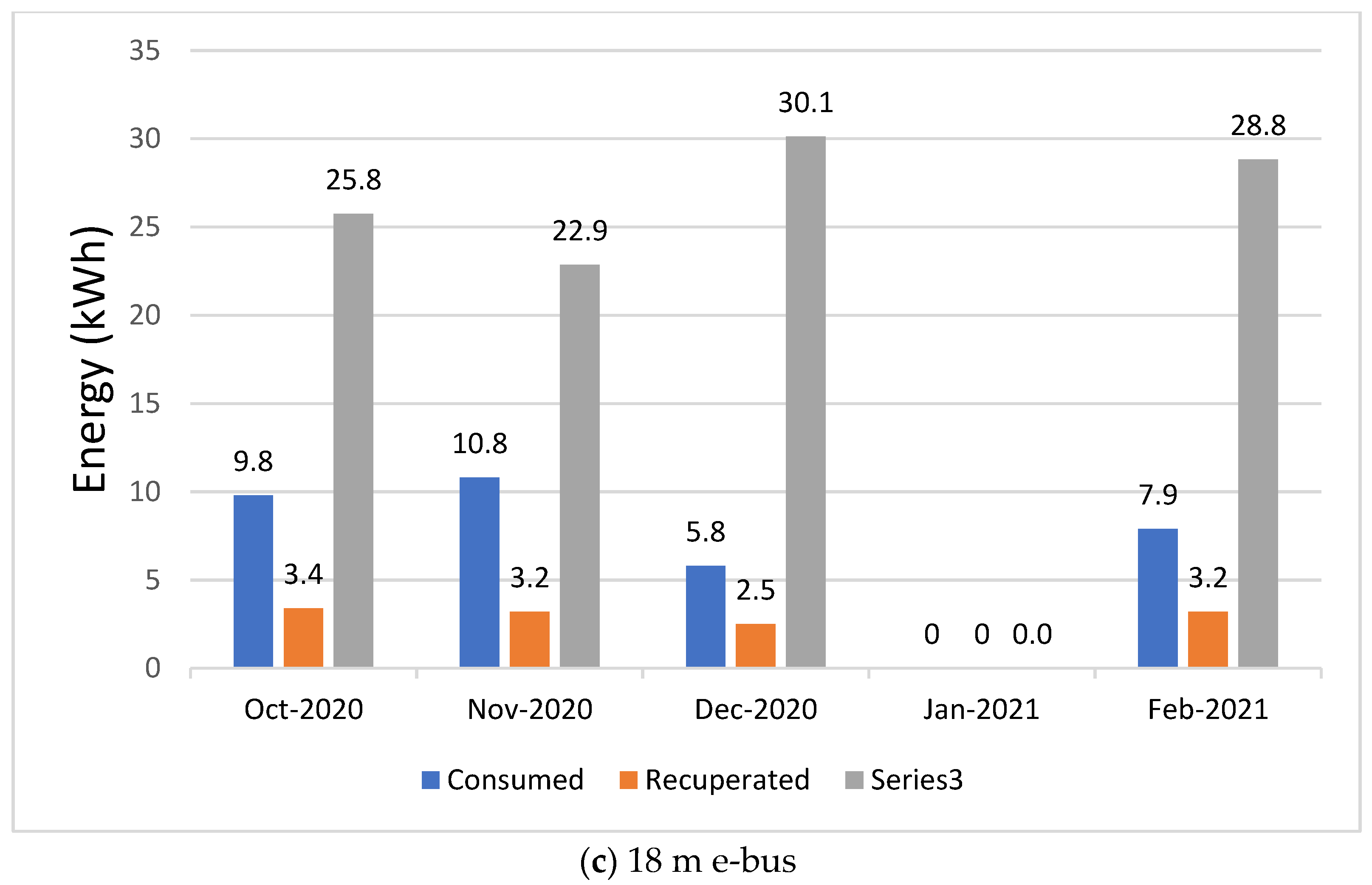
Some sample data statistics were collected from the fleet management system to investigate the total consumed and recuperated energy and its impact on the operational cost reduction (see Figure 22). The consumed energy and recuperated energy mainly depend on the mileage of the e-buses. For three lengths of e-buses, i.e., 8.9 m, 12 m, and 18 m, the recuperated energy is between 15 and 40% of the consumed energy. This gives an indication that the braking system adopted in the e-buses could reduce the operational cost by the same percent, i.e., 15–40%. Furthermore, the braking system reduces the number of frequent stops for charging. On the other hand, recuperating a high amount of energy could happen within a very short time, which has an impact on the battery lifetime.
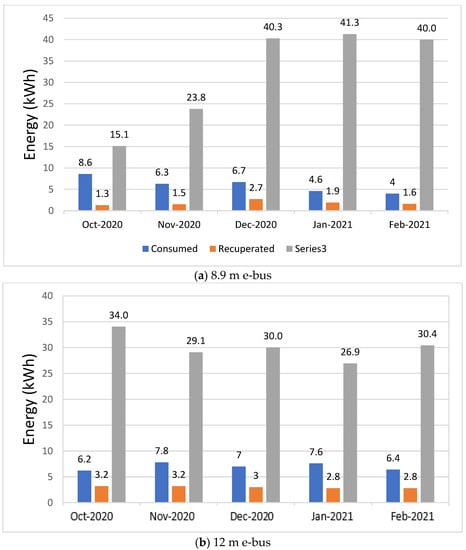
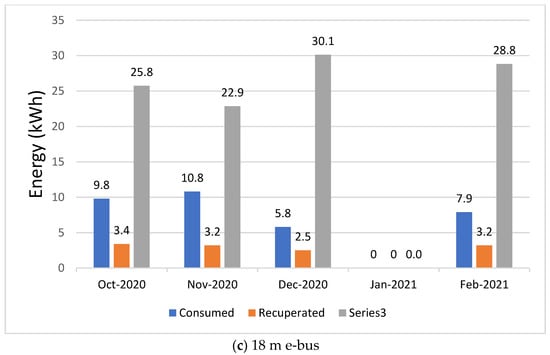
Figure 22.
Consumed and recuperated power.
The operational working hours, which include the driving time and charging time of the e-buses according to their consumption, were collected from the e-bus fleet management system, as listed in Table 8. The average operational hours are basically between 12 and 20 h per day, which is much more than the operational hours of private cars, which average about 1–2 h per day [6], which is why investing in HD e-buses provides a huge CO2 reduction compare to private cars.
Table 8.
Operating hours of e-buses.
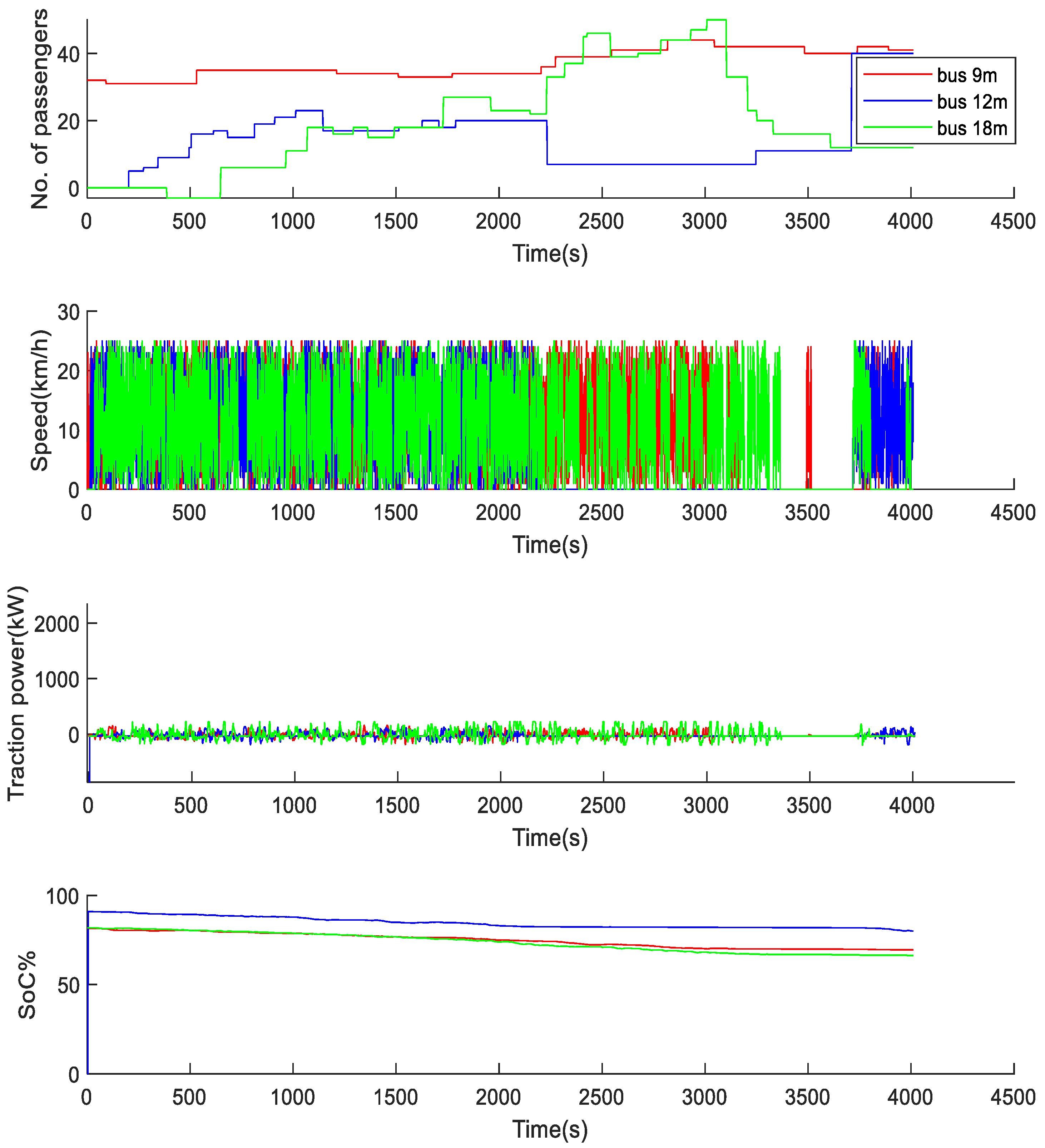
Figure 23 shows the behavior of the SoC during the operation of the demo based on the number of passengers inside the e-buses. Total passenger quantity during one round of service was analyzed in this work. According to the results, the total passenger quantity highly impacts the SoC of the battery. During 66 min of e-buses operation, for the 8.9 m e-bus, the SoC dropped by 12%, i.e., from 82% to 70% (average number of passengers = 37); for the 12 m e-bus the SoC dropped by 11%, i.e., from 91% to 80% (average number of passengers = 15), and for the 18 m e-bus, the SoC dropped by 16%, i.e., from 82% to 66% (average number of passengers = 19). However, the SoC degradation was different due to the consumed power, since e-buses have battery packs of different capacities. In other words, 12%, 11%, and 16% of SoC reduction corresponds to 19.2 kWh (12% × 160 kWh), 17.2 kWh (11% × 160 kWh), and 38.4 kWh (16% × 240 kWh) for the 8.9 m, 12 m, 18 m e-buses, respectively. Although the 18 m e-bus has fewer passengers, it consumes more energy than the 8.9 m e-bus because of its high weight and high engine power.
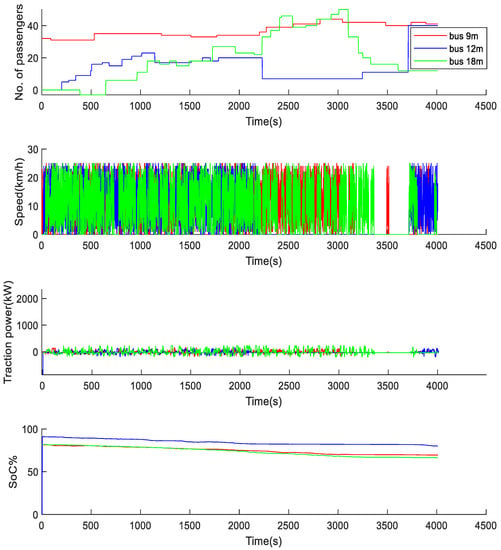
Figure 23.
Impact of the number of passengers and speed on the consumed traction power.
Based on the data from Table 7 and Figure 23, we can assume that the passenger load has a significant impact on energy consumption. Accordingly, the operational cost could be improved in the future by selecting the route and the frequency of routes that will allow for the transport of fewer passengers based on the data analyses and prediction of the number of passengers for each time during the day/week/year (weekend, national holidays, etc.). In addition, the heat generated from the batteries could be used within the e-bus to minimize the power consumed by the heating system.
5. e-Bus Fleet Impact on the Environment
The European Union has imposed some CO2 emission regulations over the past three decades. The regulations aim to minimize CO2 emissions. Since then, a series of emissions standards named “Euro” have been implemented, such as Euro 1, Euro 2, Euro 3, Euro 4, and Euro 5. These standards led to the current standard, i.e., Euro 6, which is tailored to become more strict over time and defines the acceptable limits for exhaust emissions of new vehicles sold in EU and the member states of the European Economic Area.
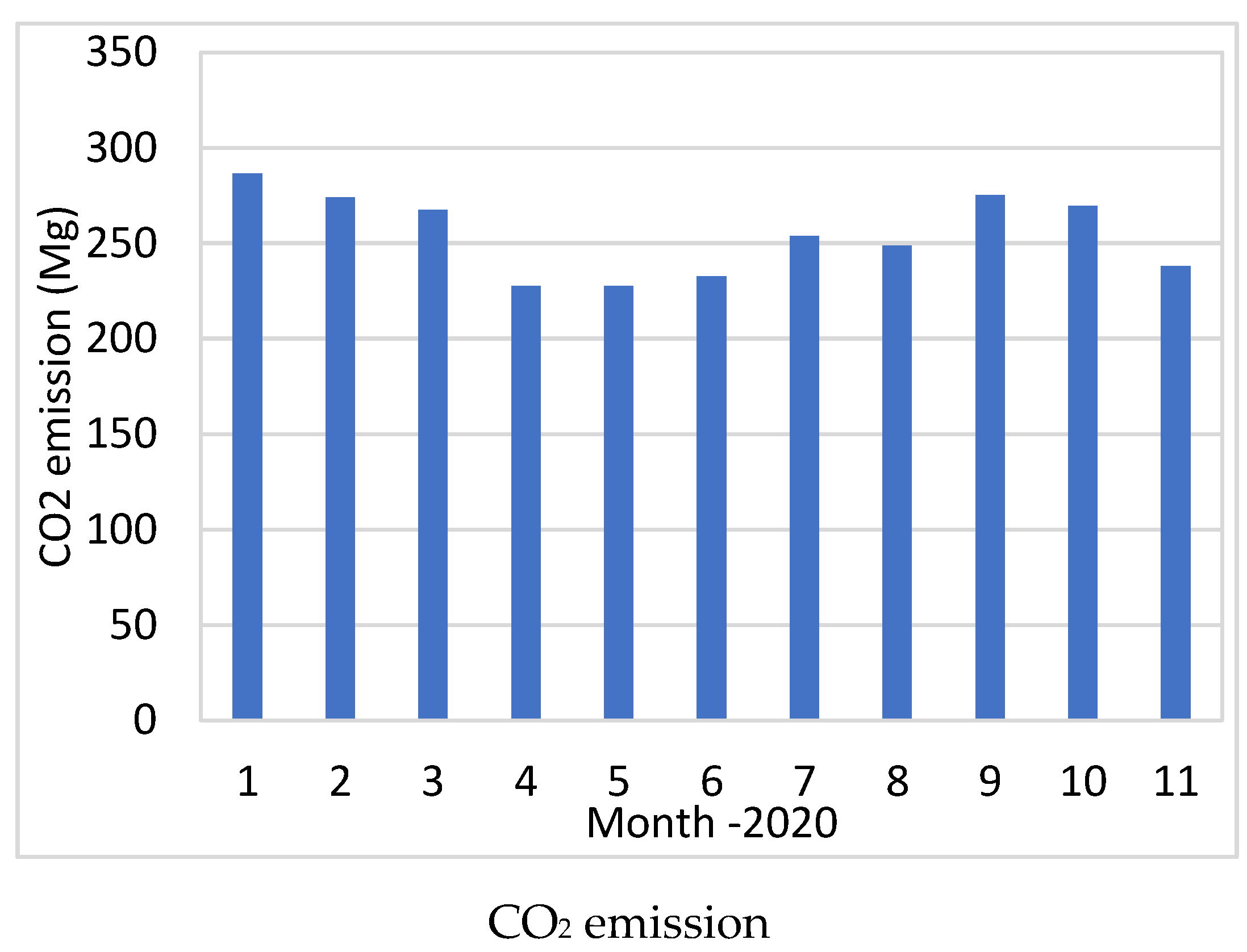
Below are some examples of CO2 emissions from real data for the diesel fuel combustion of the PKM bus fleet in Jaworzno in 2020 (see Figure 24). These data are for 12 m and 18 m ICEV buses; there is no data for the 8.9 m buses since this bus was introduced for the first time during the e-bus implementation. After the e-bus implementation, the diesel buses in Jaworzno are no longer used, or they are used only in the following cases:
Figure 24.
CO2 emissions for 4 ICEVs of the PKM bus fleet according to Euro 3, Euro 4, Euro 5, and Euro 6.
- Malfunction of the e-buses or the need to perform periodic technical inspection/service.
- The technical inspection service of the 23 e-buses planned in accordance with the service life specified of the mean time between failure (MTBF). It is conducted on the weekends when there are fewer routes to be serviced in order to not disturb the planned cycle and keep using the e-buses without resorting to using the diesel ones.
- During the traffic congestion peak in the intercity lines/routes when the maximum number of vehicles is used simultaneously for a short period of time.
- As an intercity line/route for which there is currently no formal possibility to build chargers.
According to the EU assumptions for 2030, Jaworzno is an ideal role model in terms of bus fleet electrification. Jaworzno is an example that with the appropriate modification of the line and adaptation of infrastructure, it is possible to completely replace ICEVs with EVs.
One L of diesel weighs 835 g. Diesel consists of 86.2% carbon or 720 g of carbon per liter of diesel. In order to combust this carbon to CO2, 1920 g of oxygen is needed. The sum is thus 720 + 1920 = 2640 g of CO2/liter diesel [16]. Comparing the CO2 emissions of ICEVs to those of the introduced e-buses with zero emissions, the fleet of 23 e-buses could minimize the CO2 emissions in Jaworzno by around 1000 Mg per year.
Generally, e-buses are less noisy than ICEVs; however, there is no noise data available to make an analysis about this topic.
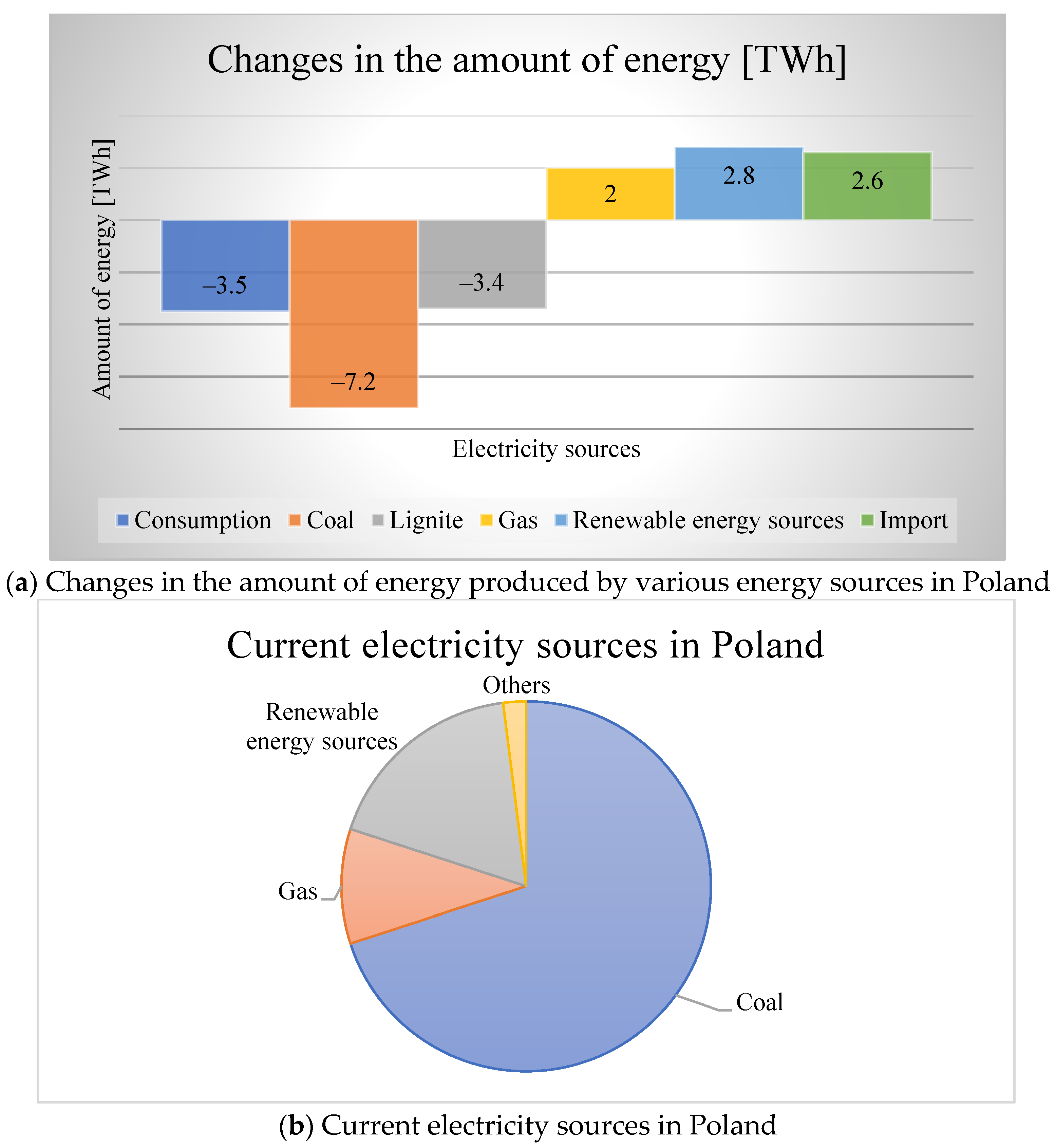
PKM Jaworzno, as one of the leaders in electromobility in Poland, uses the full potential of electric buses. In total, e-buses from Jaworzno have traveled over 7 million kilometers, which may have a large impact on greenhouse gas emissions. Additionally, the company takes into account the country’s policy regarding sources of energy production (see Figure 25). Progress has been achieved in terms of reducing the production of greenhouse gases by 3.8% and reducing consumption by 2%.
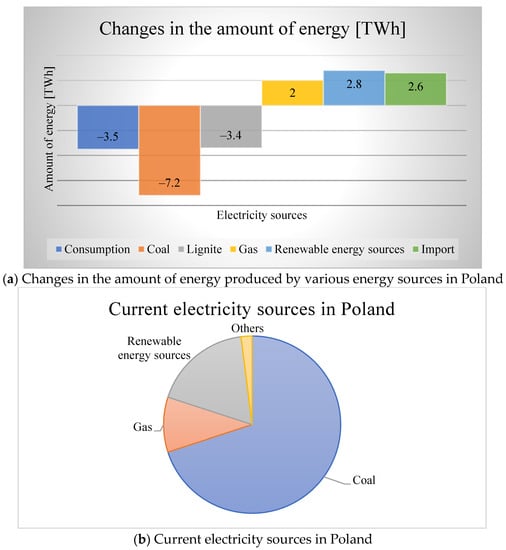
Figure 25.
(a) Changes in the amount of energy produced by various sources in Poland, (b) Current electricity sources in Poland [16].
6. e-Bus Management System
SOLARIS developed a dashboard app that collects real-time information from e-bus fleets from data acquisition devices (eSConnect), which is accessible by the dashboard app through a SIM socket cellular network (3G). The main functionalities of the eSconnect are as follows: swift maintenance support, generation of statistics and reports, access to vehicle data in real time, monitoring of operating parameters of the vehicle, tracking and monitoring of the online routes of each vehicle in the fleet, identification of faults and alerts in real time and to notify the operator about them, fleet utilization status, estimation of the energy needed to reach the destination based on the battery SoC, remote vehicle diagnoses, fault identification, current energy consumption, distance covered between charges, etc.
The dashboard app can be installed on any PC or mobile phone (see Figure 26). The e-bus operator can perform the following optimization based on the dashboard app:

Figure 26.
Dashboard app installed on a handheld device.
- Limit the downtime of the buses;
- Prevent unnecessary returns to the e-bus depot;
- Gain additional time to prepare the workshop for repairs;
- Analyze the historical data, which enables the improvement of operational efficiency.
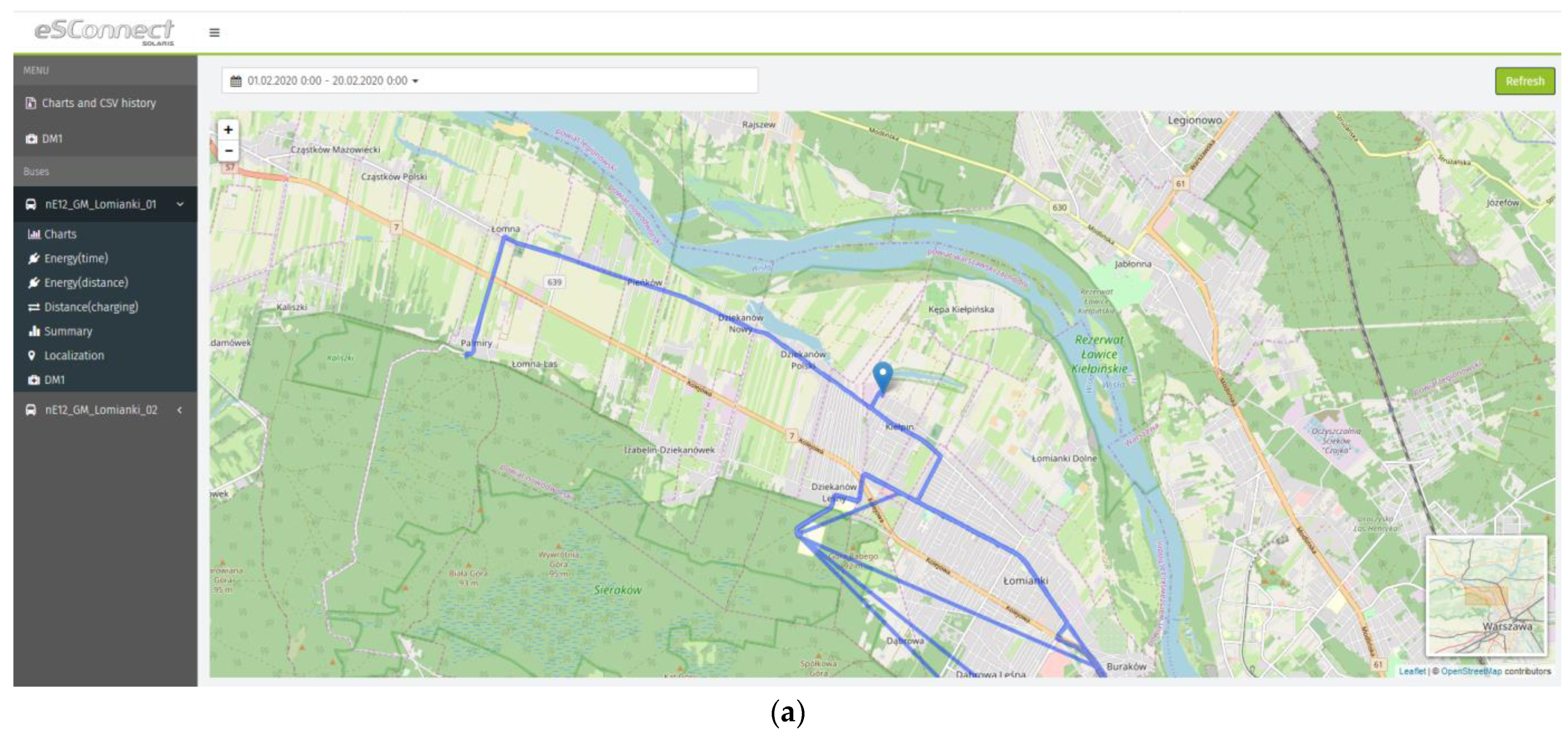
The dashboard app could have an opportunity to integrate with other fleet management systems used by the operator. With remote diagnosis, it is possible to start removing the fault without having to carry out maintenance. Additionally, it is possible to decrease the number of necessary maintenance visits and reduce the maintenance duration and vehicle downtime. The online routes of the e-buses from the dashboard app could also be monitored (see Figure 27).


Figure 27.
Monitoring the route of the e-buses from the dashboard (a) e-bus route (b) e-bus route with KPIs and operational measured parameters.
The most important aspect is that e-bus status can be monitored, as can SoC, discharge/charge current, distance, predicted distance to be covered according to the SoC, etc. (see Figure 28). In addition, in case of irregularities/error, eSConnect displays detailed information about the error.
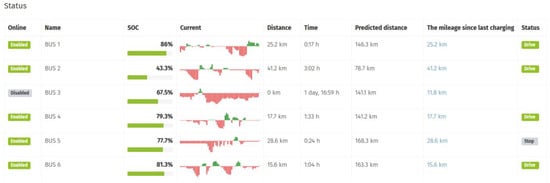
Figure 28.
Monitoring important e-buses parameters.
7. Conclusions
A real-life demo of HD vehicles was presented in this work. The vehicles are used for public transport in Jaworzno, Poland. The e-bus fleet demo includes 23 e-buses with 4 units of 8.9 m, 10 units of 12 m, and 9 units of 18 m articulated e-buses.
The e-buses are equipped with braking systems for operational cost optimization and efficiency improvement. It was found that the braking system could recuperate around 15–40% of the consumed energy. In addition, the heat generated from the braking system can be used for heating purposes. Furthermore, economic routing can be adopted by the bus operator to minimize the consumed energy and optimize the e-bus fleet operation.
There are 20 plug-in charging solutions based on NC in the depot of the e-bus operator. To minimize the consumed energy, optimal battery packs were installed in the e-buses, which also minimize the total cost of ownership. These battery packs need to be charged frequently. Therefore, 12 pantograph chargers were dispersed in Jaworzno along the e-buses routes. Due to the adopted energy management system and the charging infrastructure, which comply with the network code of the DSO grid, the e-bus fleet has a slight impact on the grid, and does not impact DSO operation. However, smart and standard charging were investigated in this study. Smart charging has less impact on the grid, less charging cost, and prolongs the battery lifetime. Furthermore, the demo e-buses have a considerable impact on CO2 emissions reduction.
Maintaining the appropriate correlation between fast and slow normal charging allows for the full use of traction battery resources. NC is adopted as much as possible in order to optimize the operational cost and improve the TCO, which is related to battery lifetime. The e-bus fleet management could be monitored online to manage all the e-buses actively and efficiently.
The energy consumed by an e-bus is a function of the number of passengers and internal consumption, which includes the engine power and heating/air-conditioning system (weather conditions). By predicting the number of passengers during the day (hourly basis)/week/year (weekend, national holidays, etc.), the operational cost can be improved by using an e-bus with less length (less consumed power).
Author Contributions
The paper was mainly done by M.A.-S., the technical coordinator of the ASSURED project. The authors from PKM and SOLARIS provided the necessary data for this study. Some of the statistical data analyses were done by B.P. All authors (M.A.-S.; B.P.; M.Z.; A.K.; M.P.; Ł.C.; J.V.M. and M.B.) contributed to the refinement of the paper. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the European Commission—Innovation and Networks Executive Agency, grant number 769850”, under the title of ASSURED—H2020-GV-2016-2017/H2020-GV-2017.
Institutional Review Board Statement
Not Applicable.
Informed Consent Statement
Not Applicable.
Data Availability Statement
The complete set of simulation data can be found in ASSURED project WP8 (D8.5); however, that source is confidential.
Acknowledgments
The VUB authors would also like to acknowledge Flanders Make for their support.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Clean Transport-Support to the Member States for the Implementation of the Directive on the Deployment of Alternative Fuels Infrastructure. Eur. Com. 2016, 136. Available online: http://www.eea.europa.eu/publications/european-union-greenhouse-gas-inventory-2013 (accessed on 29 May 2013).
- Al-Saadi, M.; Valtchev, S.; Romba, L.; Gonçalves, J.; Craciunescu, A. Comparison of Spiral and Square Coil Configurations in Wireless Power Transfer System for Contactless Battery Charging. In Proceedings of the 2019 Electric Vehicles International Conference (EV), IEEE, Bucharest, Romania, 3–4 October 2019; pp. 1–5. [Google Scholar]
- ACEA Position Paper. ACEA Position Paper Heavy-Duty Vehicles: Charging and Refuelling Infrastructure Requirements; European Automobile Manufacturers Assciation (ACEA): Brussels, Belgium, 2021. [Google Scholar]
- ERTRAC; EPoSS; ETIP SNET. European Roadmap Electrification of Road Transport; ERTRAC: Belgium, 2017; Available online: https://www.2zeroemission.eu/wp-content/uploads/2018/01/ertrac_electrificationroadmap2017.pdf (accessed on 10 June 2017).
- Al-saadi, M. Maximum Power Point Tracking and Power/Voltage Regulation for Inductive Wireless Battery Charging; IEEE: Bucharest, Romnia, 2019; pp. 2–7. [Google Scholar]
- Ghg, E.U. INCREASING THE EU’S 2030 EMISSIONS. Available online: https://climact.com/wp-content/uploads/2020/06/Climact_Target_Emissions_report_FINAL.pdf (accessed on 22 June 2020).
- Speth, D.; Funke, S.Á. Comparing options to electrify heavy-duty vehicles: Findings of german pilot projects. World Electr. Veh. J. 2021, 12, 67. [Google Scholar] [CrossRef]
- Available online: https://zeeus.eu/publications (accessed on 22 December 2018).
- Hasan, M.M.; Avramis, N.; Ranta, M.; Saez-De-ibarra, A.; Baghdadi, M.; Baghdadi, E.; Hegazy, O. Multi-objective energy management and charging strategy for electric bus fleets in cities using various ECO strategies. Sustainability 2021, 13, 7865. [Google Scholar] [CrossRef]
- Bouchareb, H.; Saqli, K.; M’Sirdi, N.; Oudghiri, M.; Naamane, A. Electro-thermal coupled battery model: State of charge, core and surface temperatures estimation. In ICEERE2020 2nd International Conference on Electronic Engineering and Renewable Energy; 2020; Available online: https://hal.archives-ouvertes.fr/hal-02486440 (accessed on 8 May 2021).
- Awadallah, M.A.; Singh, B.N.; Venkatesh, B. Impact of EV Charger Load on Distribution Network Capacity: A Case Study in Toronto. Can. J. Electr. Comput. Eng. 2016, 39, 268–273. [Google Scholar] [CrossRef]
- Haidar, A.M.A.; Muttaqi, K.M. Behavioral characterization of electric vehicle charging loads in a distribution power grid through modeling of battery chargers. IEEE Trans. Ind. Appl. 2016, 52, 483–492. [Google Scholar] [CrossRef] [Green Version]
- Alkhafaji, M.H.; Luk, P.C.K.; Bati, A.F. Integration of electric vehicles within microgrid. In Proceedings of the 2016 UKACC 11th International Conference on Control, Belfast, UK, 31 August–2 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Clement, K.; Haesen, E.; Driesen, J. Stochastic analysis of the impact of plug-in hybrid electric vehicles on the distribution grid. IET Conf. Publ. 2009, 1–4. [Google Scholar] [CrossRef] [Green Version]
- Íngrid, U.P.C.; Collado, M.; Aprà, F.M. Deliverable Name: Smart system of renewable energy storage based on INtegrated EVs and batteries to empower mobile, Distributed and centralised Energy storage in the distribution grid. In Version: 1.0, Release date: 26 Dec 2019, Dissemination Level: Public, Status: Submitted; INVADE: Brussels, Belgium, 2020; pp. 1–69. [Google Scholar]
- Available online: https://wysokienapiecie.pl/35619-zrodla-energii-w-polsce-w-2020-mniej-wegla-wiecej-gazu-oze/ (accessed on 31 January 2020).











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).