
A Sensorless Control Strategy Exploiting Error Compensation for Permanent Magnet Synchronous Motor Based on High-Frequency Signal Injection

Abstract
1. Introduction
2. Mathematical Mode for High-Frequency Pulsed Signal Injection Method
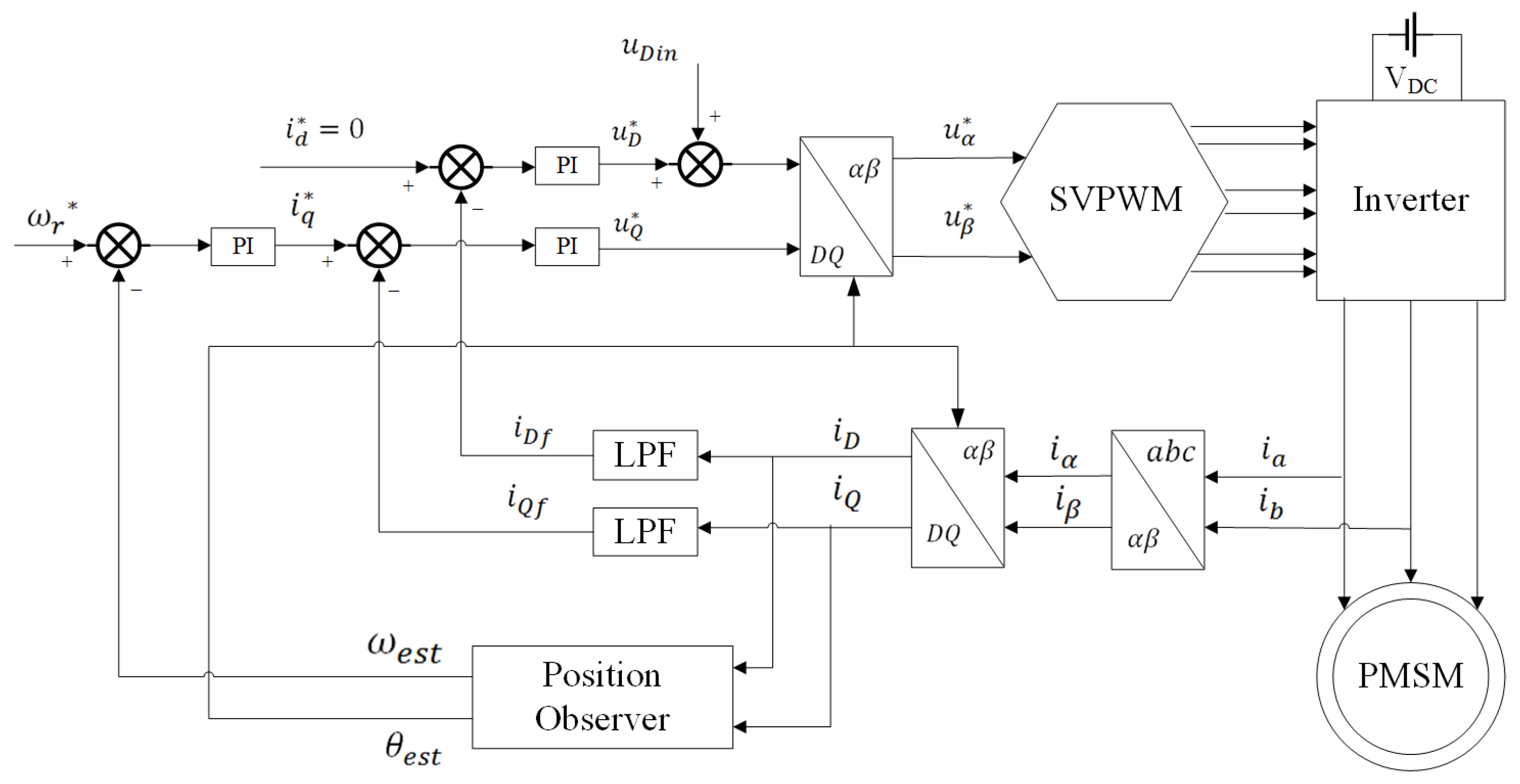
3. Proposed Sensorless Control Strategy for Rotor Position Error Compensation in High-Frequency Signal Injection
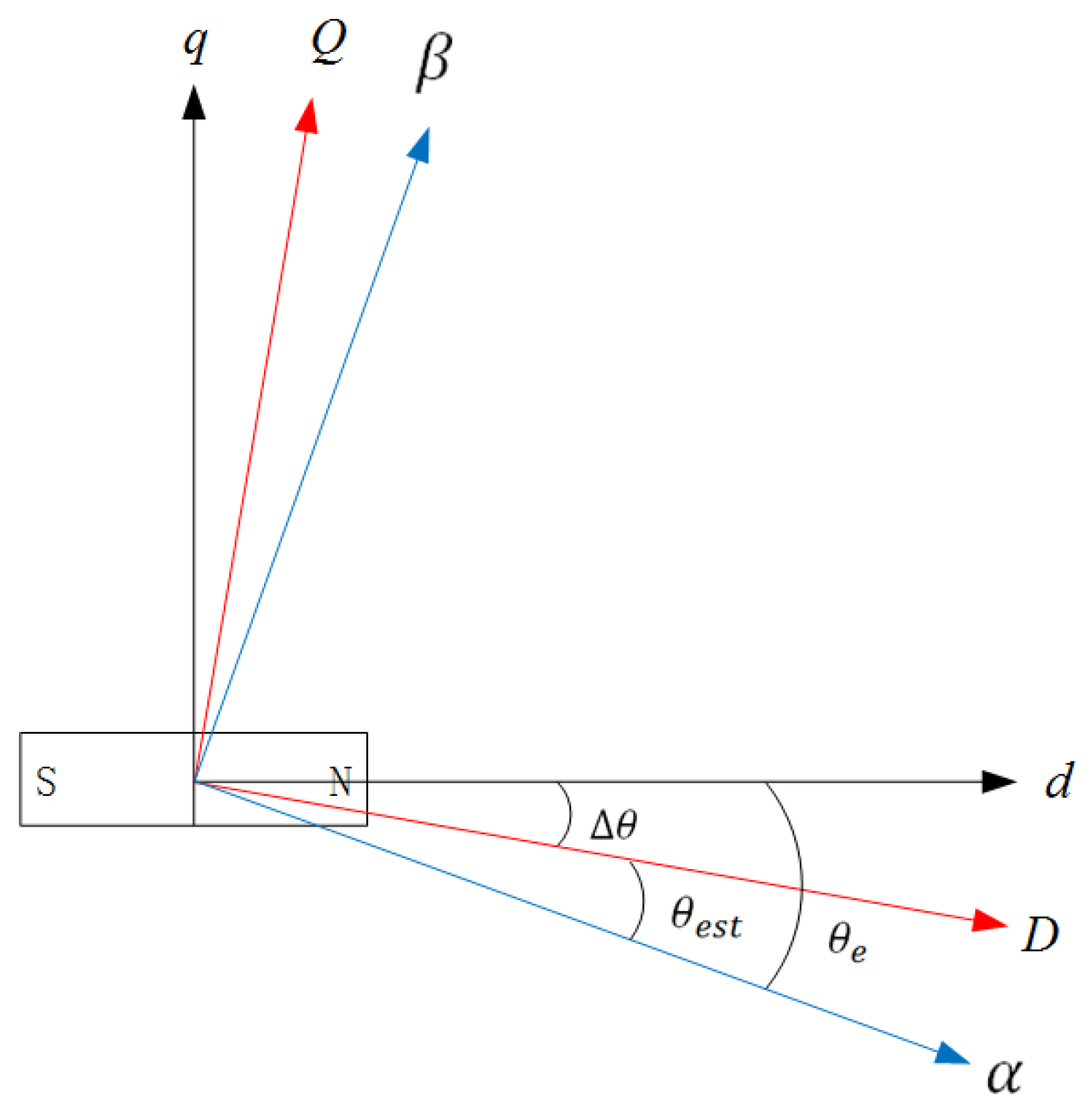
3.1. Analysis of Estimated Rotor Position Error in High-Frequency Signal Injection
3.1.1. Cross-Saturation Effect
3.1.2. Current Harmonic Errors
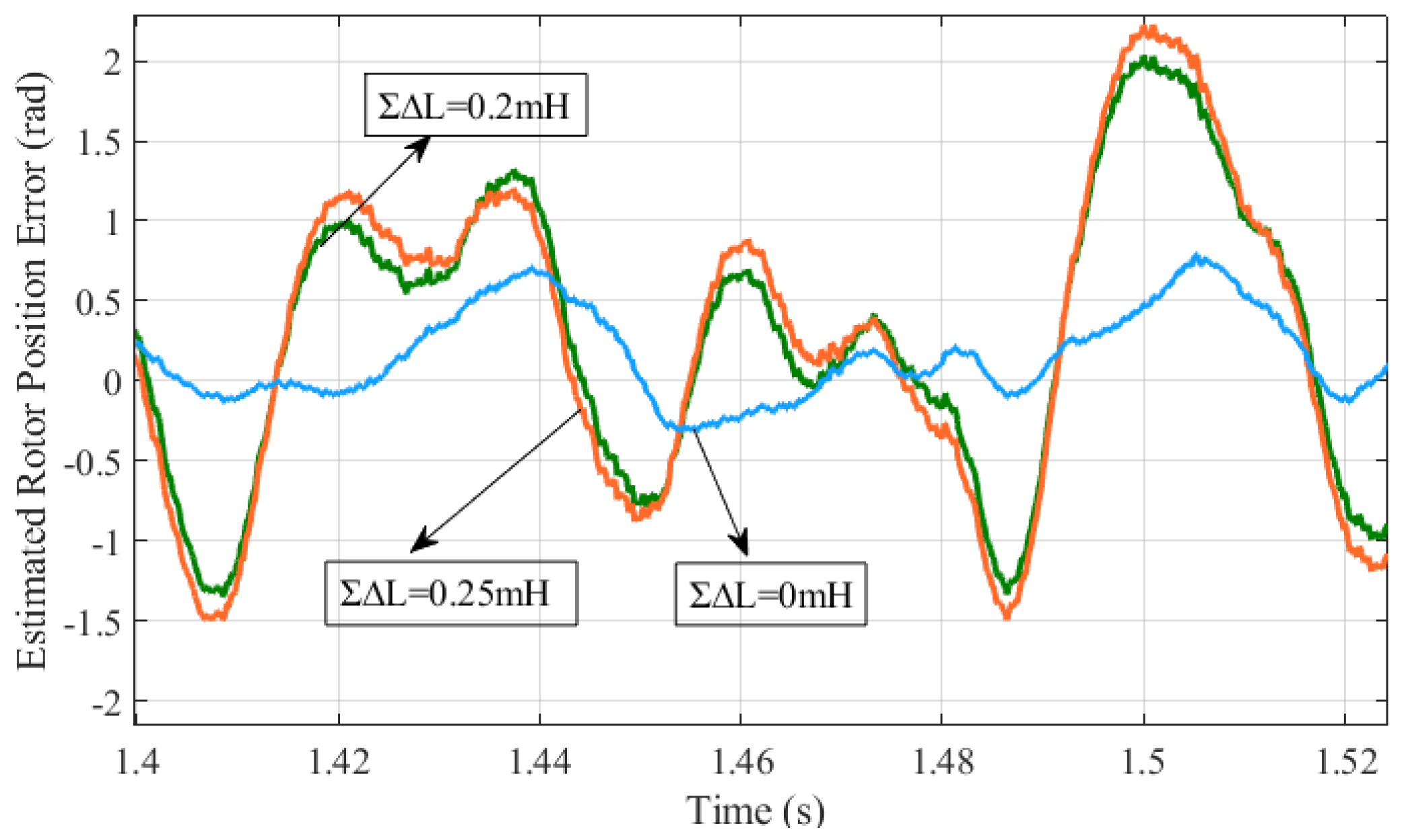
3.1.3. Current Gain Errors
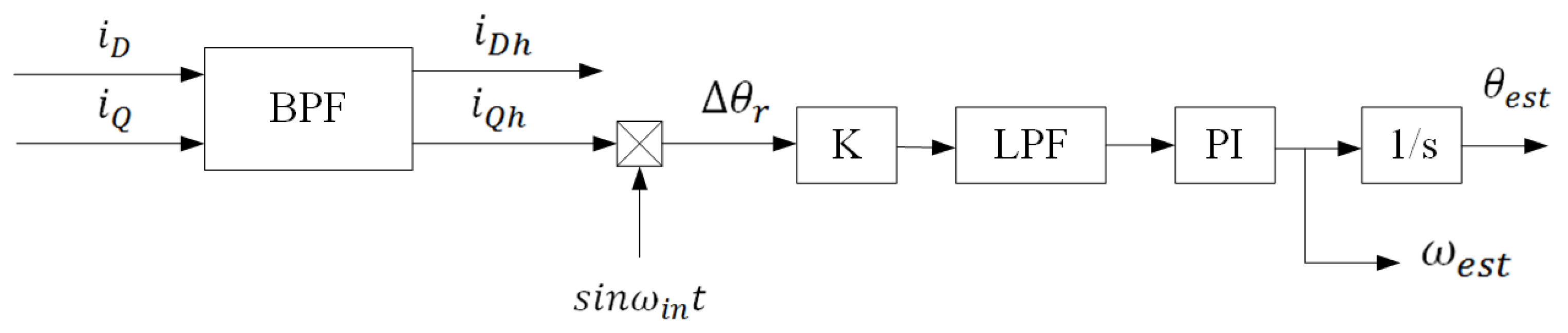
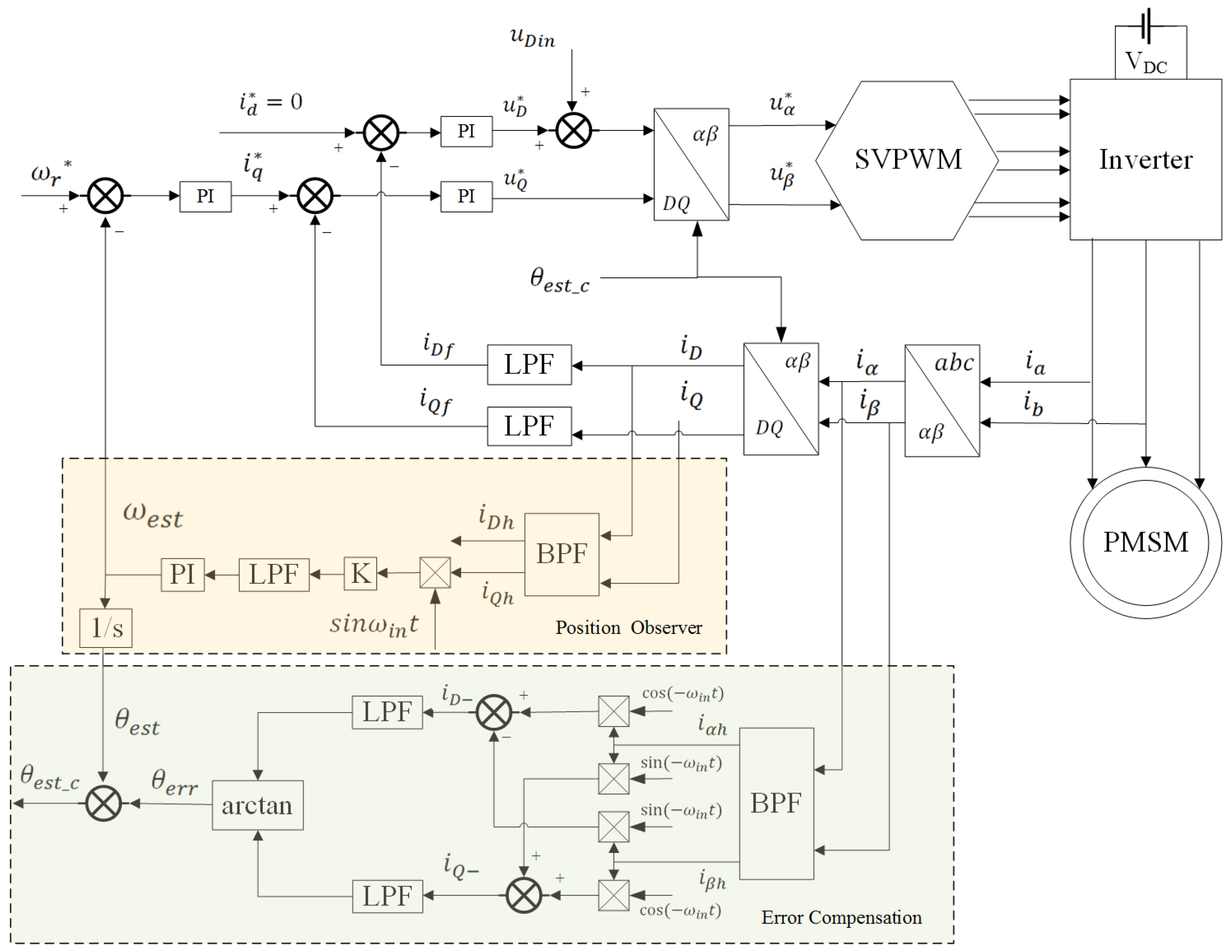
3.2. Strategy for Rotor Position Error Compensation
4. Simulation and Experimental Analysis
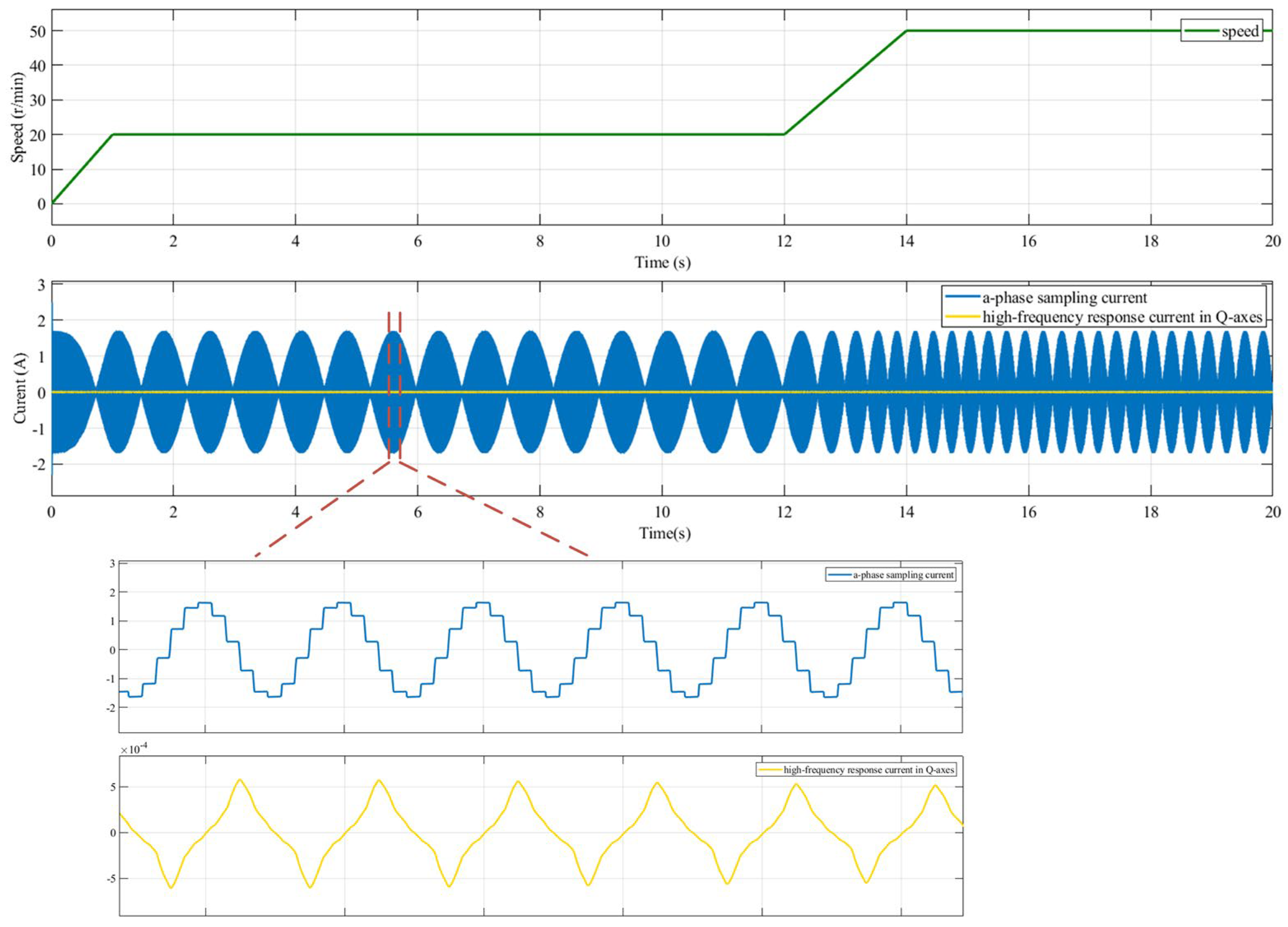
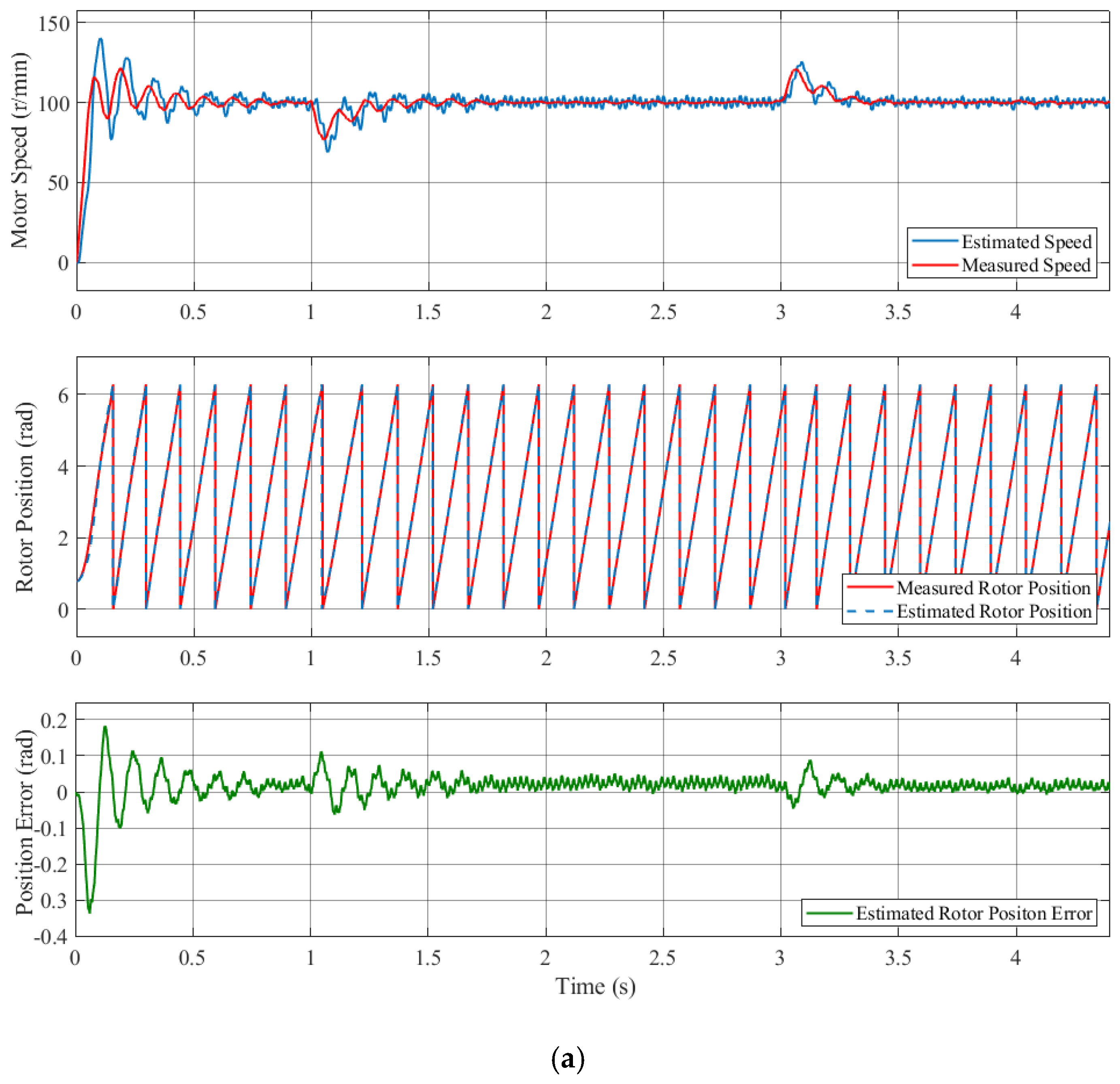
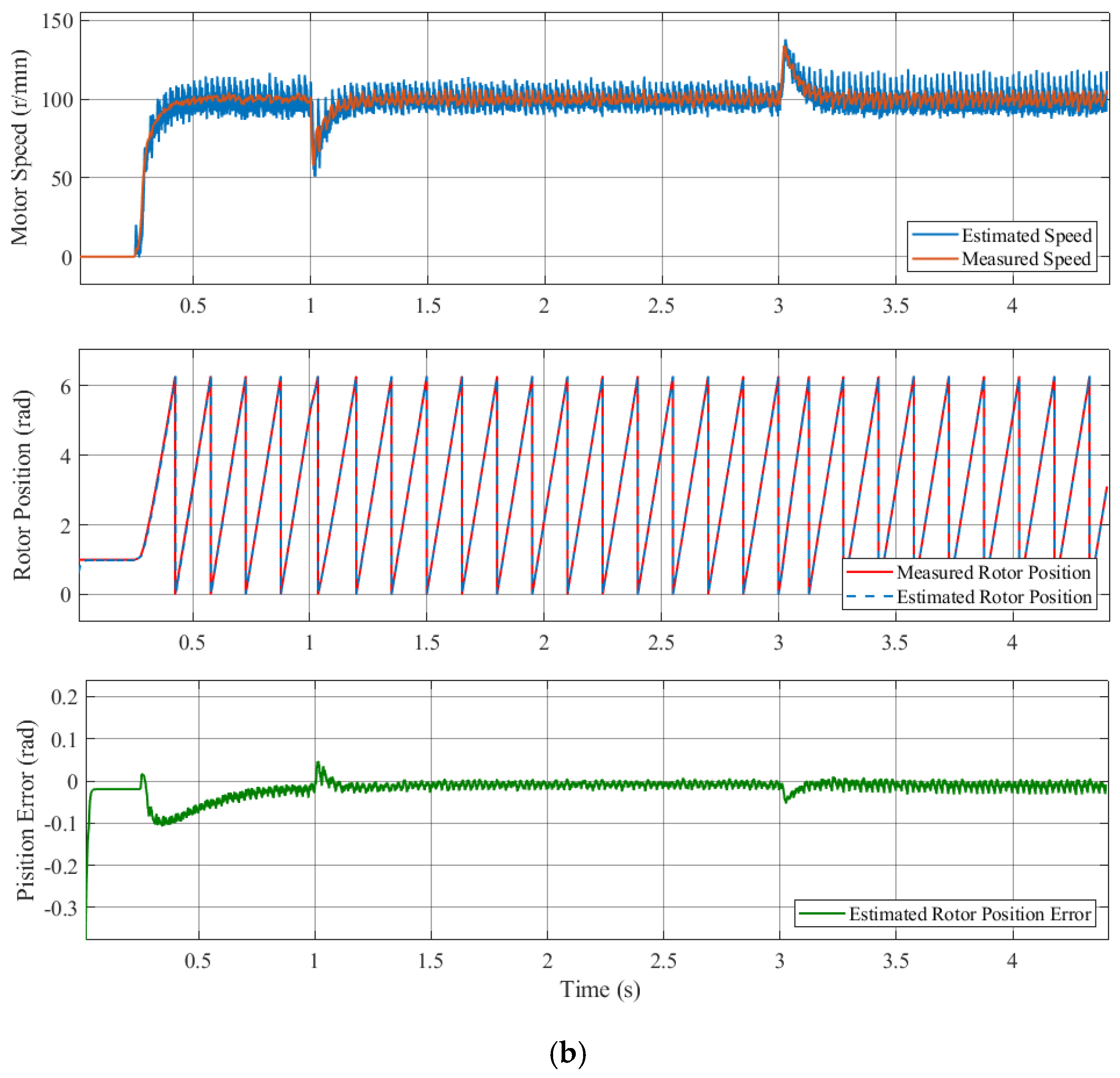
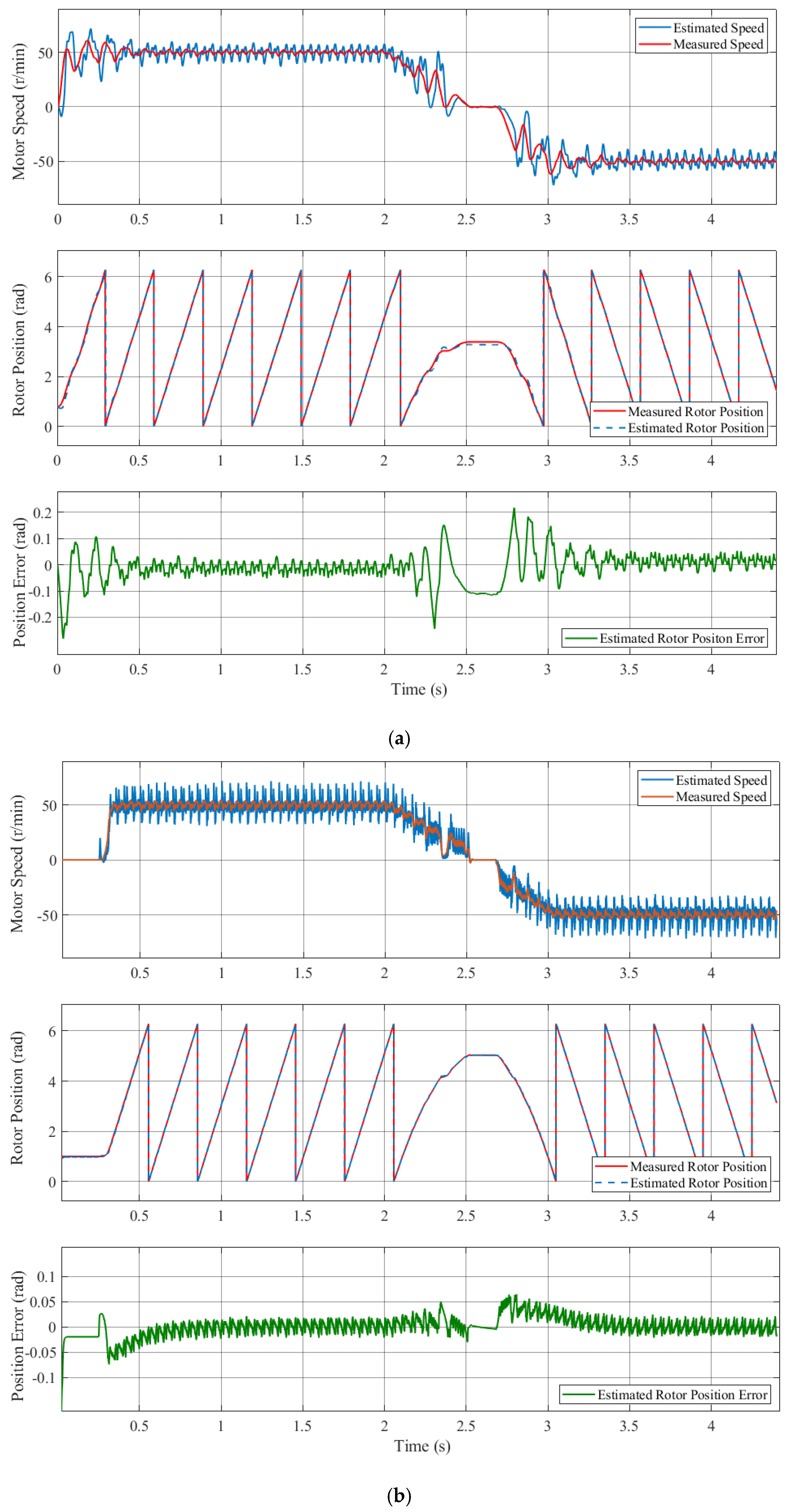
4.1. Simulation Results
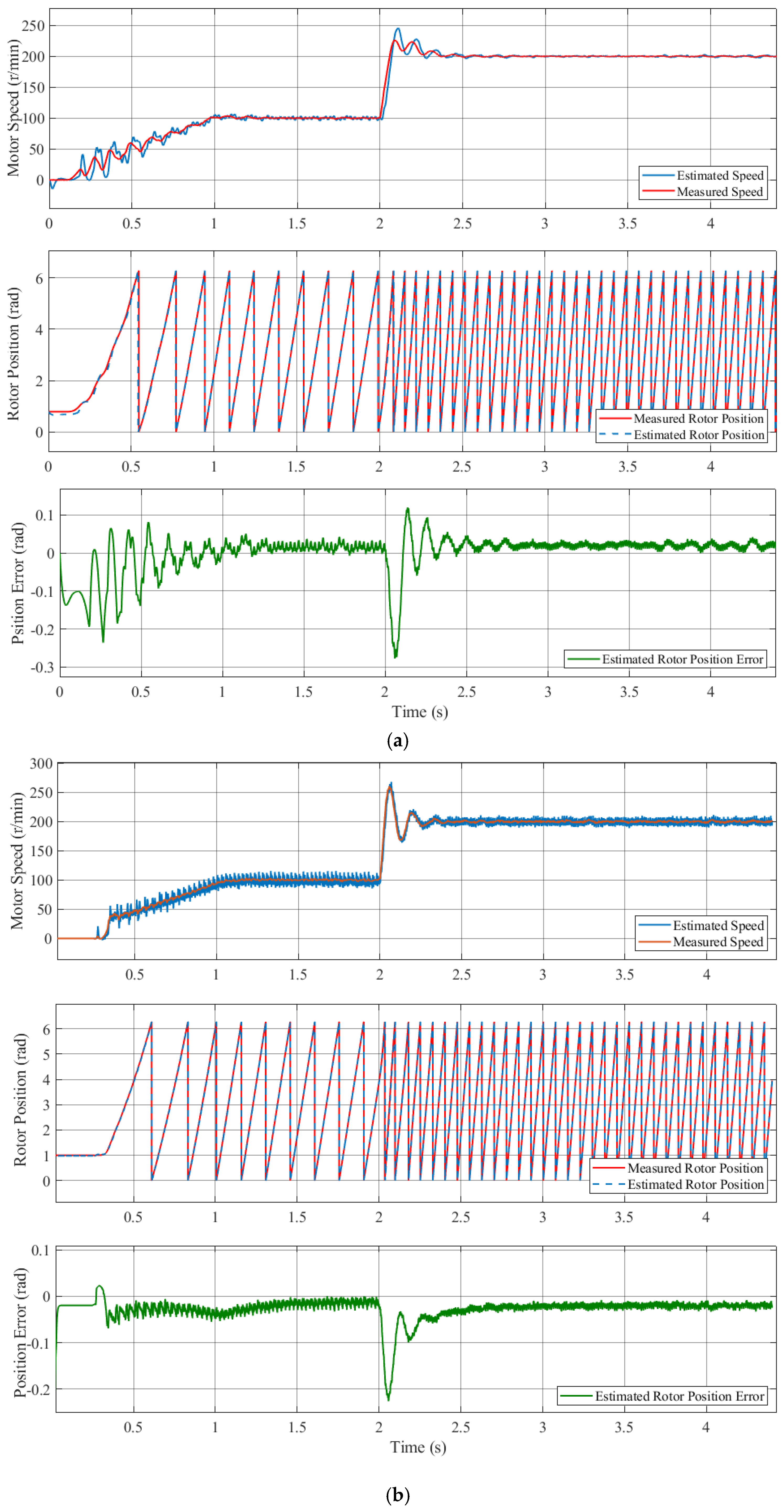
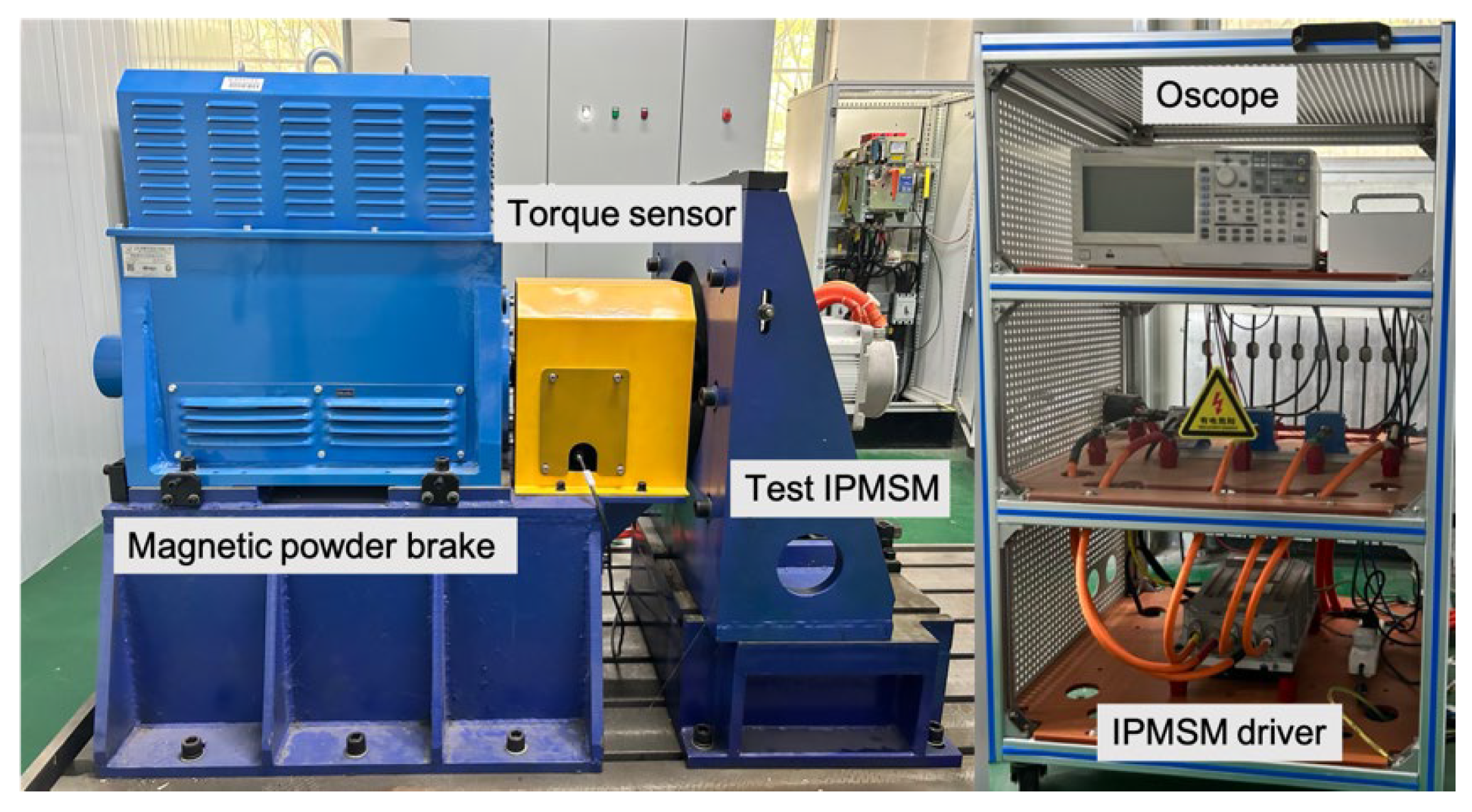
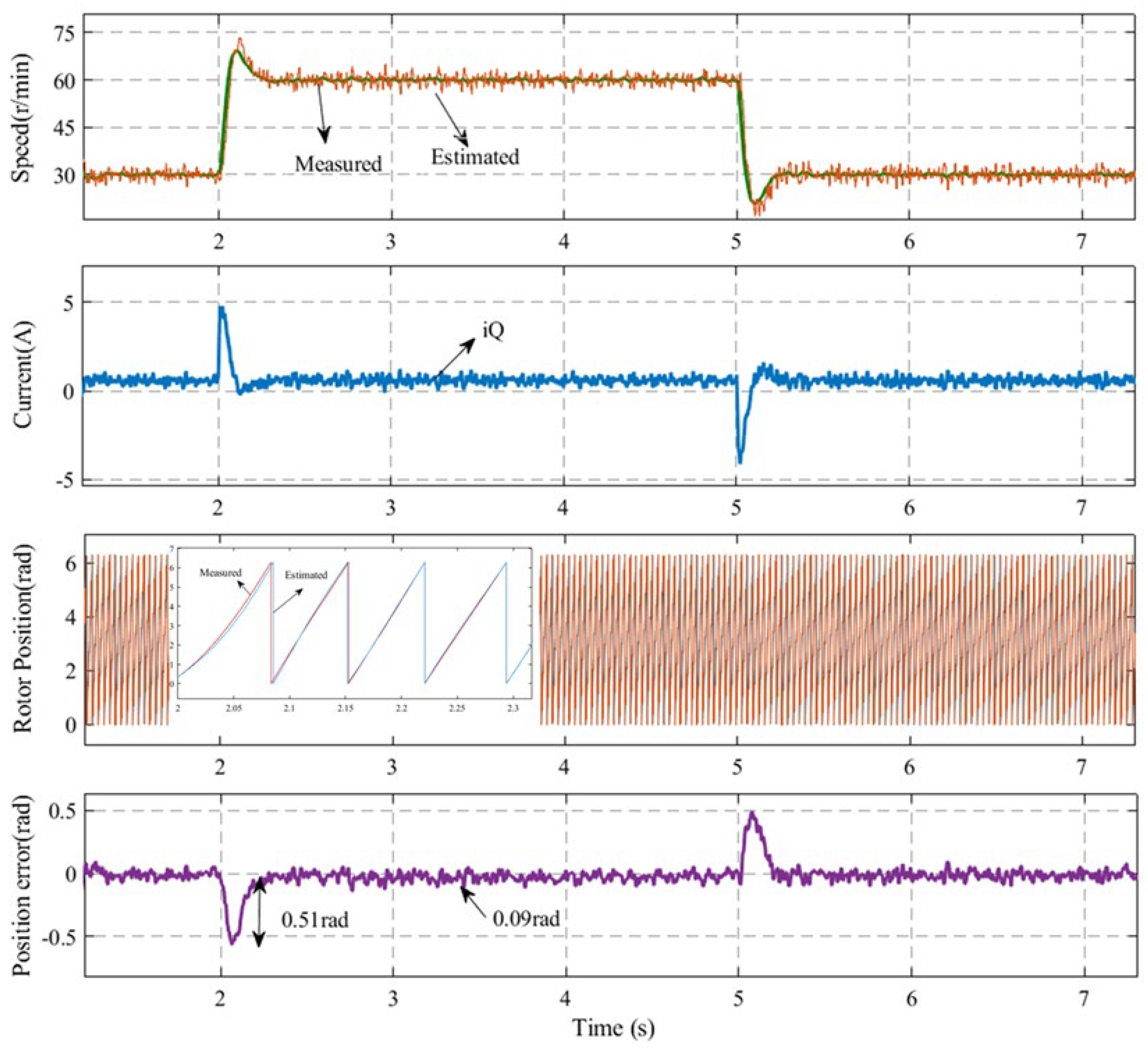
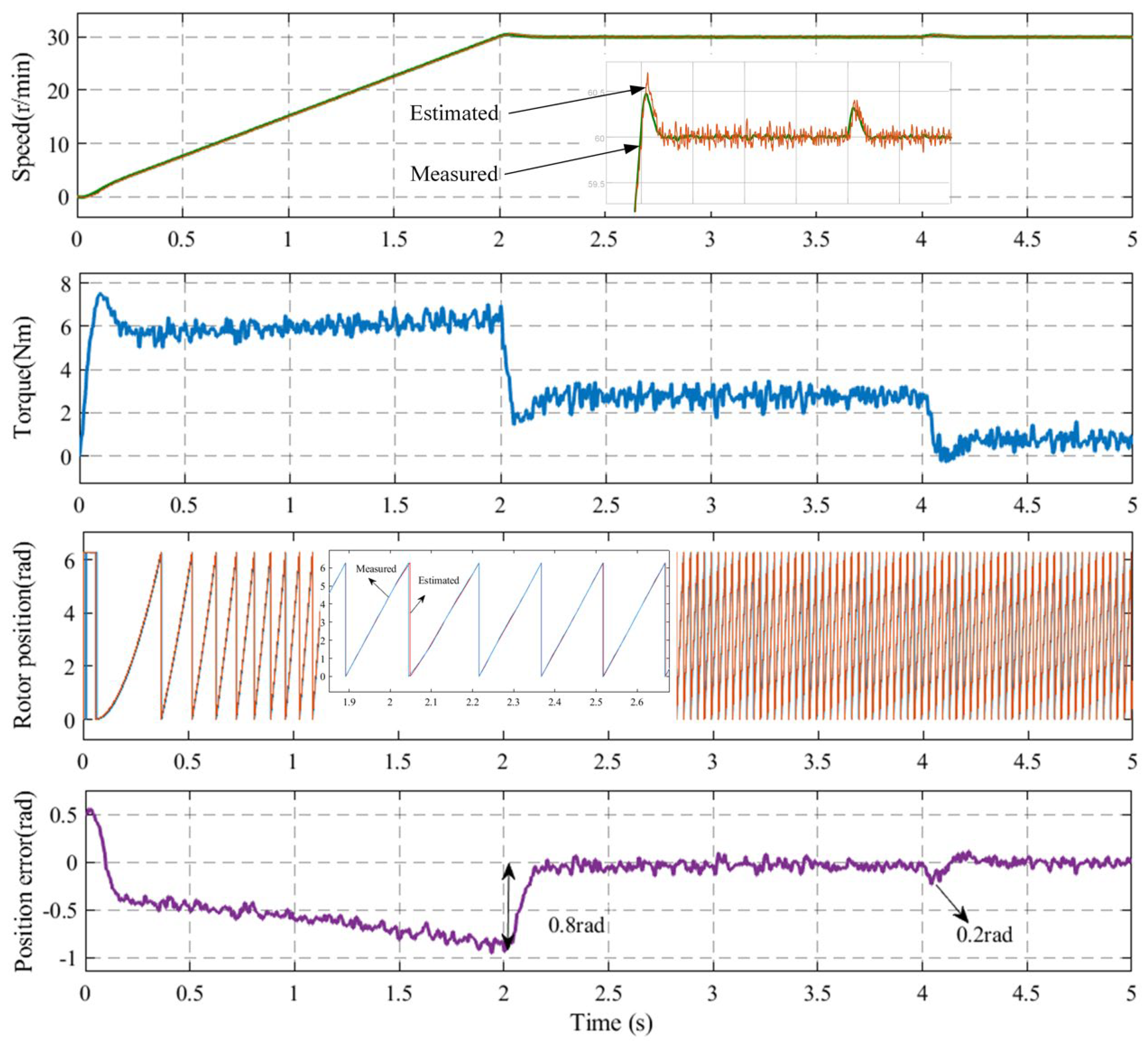
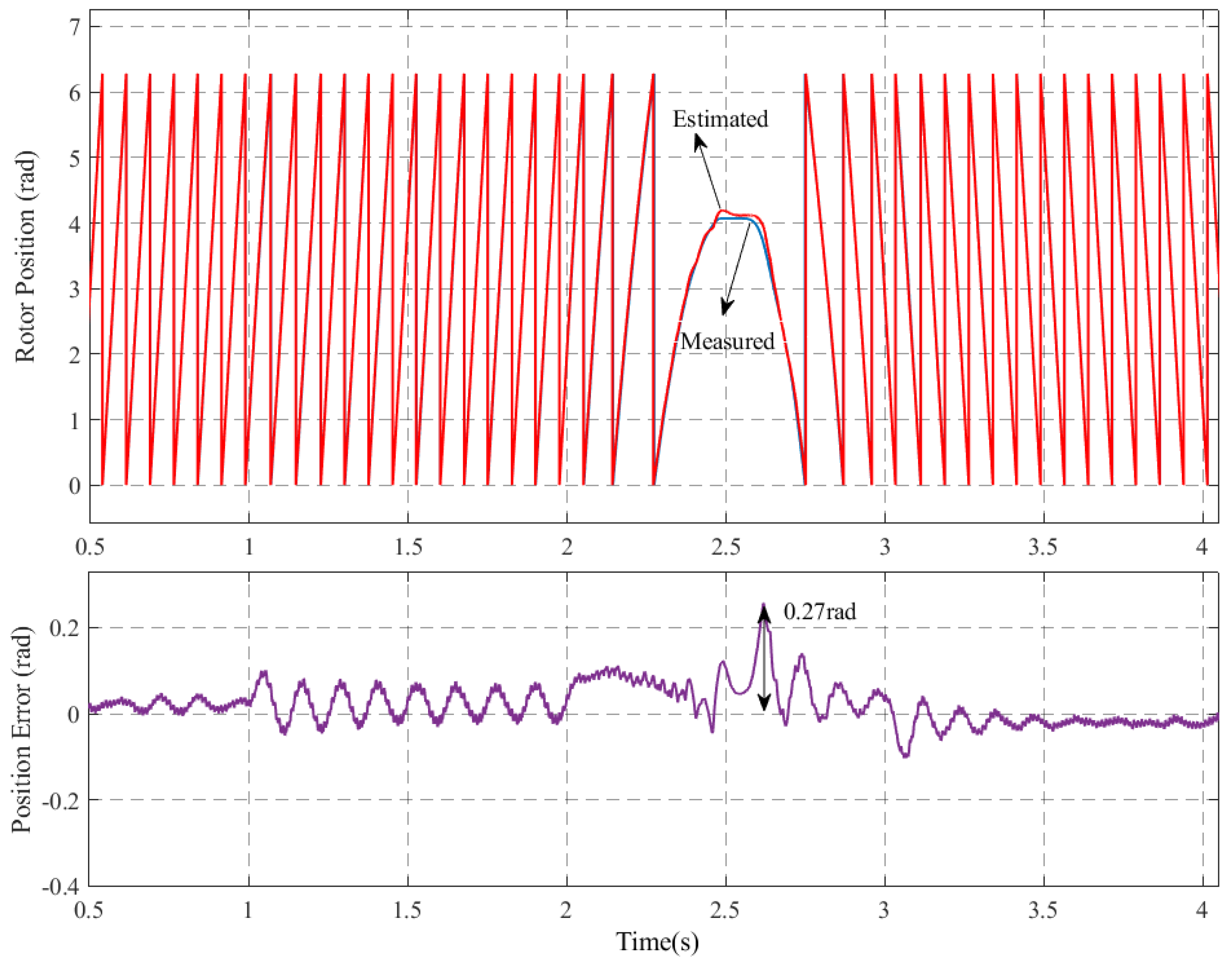
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, D.; Wang, B.; Zhang, G.; Wang, G.; Yu, Y. A Review of Sensorless Control Methods for AC Motor Drives. CES Trans. Electr. Mach. Syst. 2018, 2, 104–115. [Google Scholar] [CrossRef]
- Hua, W.; Zhu, X. Magnetic Flux Reversal Permanent Magnet Motor and Its Key Technologies Review. Proc. CSEE 2020, 40, 2657–2669. [Google Scholar]
- Li, C.; Wang, X. Overview of Sensorless Control Strategies for Permanent Magnet Synchronous Motors. Electr. Drive Autom. 2024, 46, 11–16. [Google Scholar]
- Wang, G.; Valla, M.; Solsona, J. Position Sensorless Permanent Magnet Synchronous Machine Drives—A Review. IEEE Trans. Ind. Electron. 2019, 67, 5830–5842. [Google Scholar] [CrossRef]
- Lu, J.; Liu, J. Low-Speed Sensorless Control for Interior Permanent Magnet Synchronous Motors. Electr. Mach. Control 2018, 22, 88. [Google Scholar]
- Zhang, Z.; Shen, A.; Li, P.; Luo, X.; Tang, Q. MTPA-Based High-Frequency Square Wave Voltage Signal Injection Strategy for IPMSM Control. J. Power Electron. 2021, 21, 1461. [Google Scholar] [CrossRef]
- Wang, G.; Yang, L.; Zhang, G.; Zhang, X.; Xu, D. Comparative Investigation of Pseudorandom High-Frequency Signal Injection Schemes for Sensorless IPMSM Drives. IEEE Trans. Power Electron. 2016, 32, 2123–2132. [Google Scholar] [CrossRef]
- Sheng, L.; Liu, L.; Ye, Y. Current Status and Prospects of Sensorless Control for Permanent Magnet Synchronous Motors. Electrotech. Electr. 2023, 2, 1–8. [Google Scholar]
- Li, X.; Du, J.; Liang, D.; Huang, F.; Lou, J. Low-Speed Sensorless Control for Permanent Magnet Linear Motors Based on Improved Pulsating Injection Method. Electr. Mach. Control 2018, 22, 31. [Google Scholar]
- Li, W.; Liu, J. Sensorless Optimization Method for Interior Permanent Magnet Synchronous Motors Considering Magnetic Saturation and Cross-Coupling Effects. Electr. Mach. Control 2020, 35, 4465. [Google Scholar]
- Peng, S.Q.; Jiang, Y.H.; Lan, Z.Y.; Li, F. Novel Exponential Adaptive Sliding Mode Observer for Sensorless Control of Permanent Magnet Synchronous Motors. Electr. Mach. Control 2022, 26, 104. [Google Scholar]
- Lu, W.; Zhang, Z.; Wang, D.; Lu, K.; Wu, D.; Ji, K.; Guo, L. A New Load Torque Identification Sliding Mode Observer for Permanent Magnet Synchronous Machine Drive System. IEEE Trans. Power Electron. 2019, 34, 7852. [Google Scholar] [CrossRef]
- Wang, C.; Gou, L.; Zhou, M.; You, X.; Dong, S. Sensorless Control for Interior Permanent Magnet Synchronous Motors Based on Improved Discrete Second-Order Sliding Mode Observer. Electr. Mach. Control 2023, 38, 387. [Google Scholar]
- Lin, M.; Li, Y.H.; Wu, C.; Yuan, G.Q.; Li, C. Predictive Control of Permanent Magnet Synchronous Motors Based on Sliding Mode Model Reference Adaptive System Observer. Electr. Mach. Control 2017, 32, 156. [Google Scholar]
- Zhang, Y.; Xu, B.; Wei, H.; Li, H.; Liu, W. Novel Model Reference Adaptive Deadbeat Current Predictive Control for PMSM. Electr. Mach. Control 2023, 27, 157. [Google Scholar]
- Li, Z.; An, J.; Xiao, Y.; Zhang, Q.; Sun, H. Design of Model Predictive Control System for Permanent Magnet Linear Motors Based on Adaptive Observer. Electr. Mach. Control 2021, 36, 1190. [Google Scholar]
- Quang, N.K.; Hieu, N.T.; Ha, Q.P. FPGA-Based Sensorless PMSM Speed Control Using Reduced-Order Extended Kalman Filters. IEEE Trans. Ind. Electron. 2014, 61, 65. [Google Scholar] [CrossRef]
- Li, H.; Xu, H.; Xu, Y. Model Predictive Torque Control of Permanent Magnet Synchronous Motor Under Extended Kalman Filter Parameter Identification. Electr. Mach. Control 2023, 27, 19. [Google Scholar]
- Dong, S.; Zhou, M.; You, X.; Wang, C. A Sensorless Control Strategy of Injecting HF Voltage into D-Axis for IPMSM in Full Speed Range. IEEE Trans. Power Electron. 2022, 37, 13587. [Google Scholar] [CrossRef]
- Liu, H.; Zhou, B.; Guo, H.; Liu, B.; Li, J.; Xu, X.; Shi, R. Error Analysis of Pulsating High-Frequency Signal Injection Method. Electr. Mach. Control 2015, 30, 38–44. [Google Scholar]
- Wang, S.; Yang, K.; Chen, K. An Improved Position-Sensorless Control Method at Low Speed for PMSM Based on High-Frequency Signal Injection into a Rotating Reference Frame. IEEE Access 2019, 7, 86510–86521. [Google Scholar] [CrossRef]
- Wang, X.; Fang, X.; Wang, Z.; Zhong, Z.; Wang, Y.; Lin, F.; Yang, Z. Self-Adjusting Strategy Based on Rotating Injection for Sensorless Control of High-Power PMSM Drives. In Proceedings of the 10th International Conference on Power Electronics, Busan, Republic of Korea, 27–30 May 2019; pp. 718–723. [Google Scholar]
- Szabo, G.; Veszpremi, K. Sensorless Vector Control of Permanent Magnet Synchronous Machine Using High-Frequency Rotating Injection. In Proceedings of the IEEE 19th International Power Electronics and Motion Control Conference, Gliwice, Poland, 25–29 April 2021; pp. 588–593. [Google Scholar]
- Zhang, G.; Wang, G.; Xu, D. Initial Position Detection Method for Permanent Magnet Synchronous Motors Based on Filterless Square-Wave Signal Injection. Electr. Mach. Control 2017, 32, 165. [Google Scholar]
- Wang, Z.; Gao, C.; Gu, M.; Cheng, M. A Novel Vector Magnetic Circuit Based Position Observer for IPMSM Drives Using High-Frequency Signal Injection. IEEE Trans. Power Electron. 2023, 39, 1333–1342. [Google Scholar] [CrossRef]
- Lü, X.; Liu, G.; Mao, K. Initial Position Detection of Permanent Magnet Motors Based on Virtual Pulsating High-Frequency Injection Method. Electr. Mach. Control 2017, 32, 34–41. [Google Scholar]
- Liu, J.M.; Zhu, Z.Q. Novel Sensorless Control Strategy with Injection of High-Frequency Pulsating Carrier Signal into Stationary Reference Frame. IEEE Trans. Ind. Appl. 2013, 50, 2574–2583. [Google Scholar] [CrossRef]
- Luo, X.; Tang, Q.; Shen, A.; Zhang, Q. PMSM Sensorless Control by Injecting HF Pulsating Carrier Signal into Estimated Fixed-Frequency Rotating Reference Frame. IEEE Trans. Ind. Electron. 2016, 63, 2294–2303. [Google Scholar] [CrossRef]
- Zhou, Q.; Wang, Y.; Shi, K.; Zhang, Y.; Du, G. High-Frequency Pulsating Voltage Injection Based on Generalized Second-Order Integrator for PMSM Sensorless Control. Electr. Mach. Control. 2024, 28, 179–188. [Google Scholar]
- Wang, J.; Yan, J.; Ji, G.; Shan, L.; Ying, Z. A Dual Position Observer-Based Sensorless Control Method for Permanent Magnet Synchronous Motors at Low Speeds. Trans. China Electrotech. Soc. 2023, 38, 375–386. [Google Scholar]
- Dong, W.; Zhu, X.; Zhang, L.; Xu, L.; Peng, Z.; Chen, W. Research on Sensorless Control of Leakage-Flux Controllable Permanent Magnet Motors Based on Adaptive Demodulation Robust Observer. Proc. CSEE 2023, 43, 6840–6852. [Google Scholar]
- Liu, J.; Fu, K.; Mai, Z.; Xiao, F.; Zhang, W. Sensorless Control Strategy of Improved HF Pulsating Voltage Injection Based on Dual Frequency Notch Filter. Proc. CSEE 2021, 41, 749. [Google Scholar]
- Li, H.; Zhang, X.; Yang, S.; Li, F.; Ma, M. Improved Initial Rotor Position Estimation of IPMSM Using Amplitude Demodulation Method Based on HF Carrier Signal Injection. In Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 1996–2001. [Google Scholar]
- Yang, S.C.; Yang, S.; Hu, J. Design Consideration on the Square-Wave Voltage Injection for Sensorless Drive of Interior Permanent-Magnet Machines. IEEE Trans. Ind. Electron. 2017, 64, 159. [Google Scholar] [CrossRef]
- Li, D.; Yuan, J.; Wang, K. SOGI Cascaded SFNF-Based High-Frequency Injection Sensorless Motor Control Method. Electr. Mach. Control 2024, 28, 24–32. [Google Scholar]
- Hinkkanen, M.; Pescetto, P.; Molsa, E.; Saarakkala, S.E.; Pellegrino, G.; Bojoi, R. Sensorless Self-Commissioning of Synchronous Reluctance Motors at Standstill Without Rotor Locking. IEEE Trans. Ind. Appl. 2017, 53, 2120–2129. [Google Scholar] [CrossRef]
- Wang, G.; Qu, L.; Zhan, H.; Xu, J.; Ding, L.; Zhang, G.; Xu, D. Self-Commissioning of Permanent Magnet Synchronous Machine Drives at Standstill Considering Inverter Nonlinearities. IEEE Trans. Power Electron. 2014, 29, 6615–6627. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, G.; Xu, D.; Fu, Y.; Ni, R. Rotor Position Observation Method for Interior Permanent Magnet Motors Based on Adaptive Notch Filter. Proc. CSEE 2016, 36, 2521–2527. [Google Scholar]
- Nian, H.; Li, J.; Wan, Z. Sensorless Control Technology for Permanent Magnet Wind Generators Based on Online Parameter Identification. Proc. CSEE 2012, 32, 146–154. [Google Scholar]
- Huang, K.; Gao, L.; Huang, S. Rotor Position Correction Method for High-Speed Permanent Magnet Synchronous Motors Based on Current Loop Error Compensation. Proc. CSEE 2017, 37, 241–249. [Google Scholar]
- Shi, X.; Wang, X.; Xu, T.; Gu, C. Self-Optimizing Commutation Correction Strategy for High-Speed Brushless DC Motors. Electr. Mach. Control 2019, 34, 3997–4005. [Google Scholar]
- Gu, C.; Wang, X.; Zhang, F.; Deng, Z. Correction of Rotor Position Estimation Error for High-Speed Permanent Magnet Synchronous Motor Sensorless Drive System Based on Minimum-Current-Tracking Method. IEEE Trans. Ind. Electron. 2020, 67, 8271–8280. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Rotor poles | 2 | |
| Rated voltage | 380 | V |
| Rated speed | 1500 | r/min |
| Rated power | 1.18 | kW |
| Rated torque | 7.5 | Nm |
| Phase resistance | 0.91 | Rs/Ω |
| d-axis inductance | 3.96 | mH |
| q-axis inductance | 7.96 | mH |
| Flux linkage | 0.1827 | Wb |
| Operation Conditions | Conventional Method | Proposed Strategy |
|---|---|---|
| Speed variation | 0.28 rad | 0.22 rad |
| Load variation | 0.11 rad | 0.05 rad |
| Forward and reverse rotation | 0.21 rad | 0.06 rad |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Inamdar, M.N.; Wang, Y. A Sensorless Control Strategy Exploiting Error Compensation for Permanent Magnet Synchronous Motor Based on High-Frequency Signal Injection. World Electr. Veh. J. 2025, 16, 261. https://doi.org/10.3390/wevj16050261
Li Z, Inamdar MN, Wang Y. A Sensorless Control Strategy Exploiting Error Compensation for Permanent Magnet Synchronous Motor Based on High-Frequency Signal Injection. World Electric Vehicle Journal. 2025; 16(5):261. https://doi.org/10.3390/wevj16050261
Chicago/Turabian StyleLi, Zhouji, Mohammad Nizamuddin Inamdar, and Yongwei Wang. 2025. "A Sensorless Control Strategy Exploiting Error Compensation for Permanent Magnet Synchronous Motor Based on High-Frequency Signal Injection" World Electric Vehicle Journal 16, no. 5: 261. https://doi.org/10.3390/wevj16050261
APA StyleLi, Z., Inamdar, M. N., & Wang, Y. (2025). A Sensorless Control Strategy Exploiting Error Compensation for Permanent Magnet Synchronous Motor Based on High-Frequency Signal Injection. World Electric Vehicle Journal, 16(5), 261. https://doi.org/10.3390/wevj16050261