
Trajectory Tracking in Autonomous Driving Based on Improved hp Adaptive Pseudospectral Method

Abstract
1. Introduction
2. Mathematical Model of Vehicle Path Tracking Problem
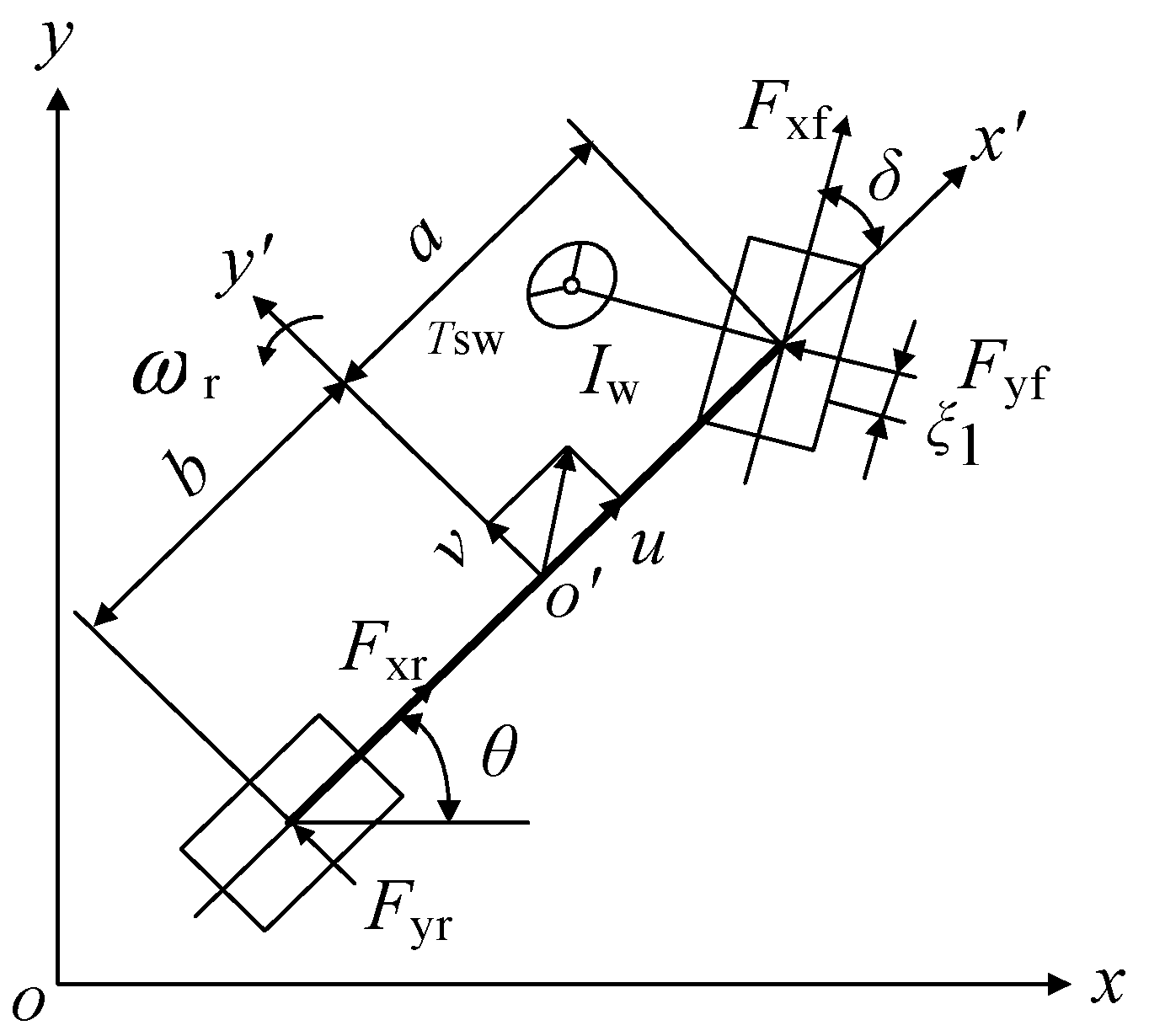
2.1. Mathematical Model of Vehicle
2.2. Optimal Control Object of Path Tracking Problem
2.3. Constrains
- (1)
- Edge value constraint
- (2)
- Path constraint
- (3)
- Control and state variable constraints
3. Adaptive Pseudospectral Method
3.1. Time Domain Variation
3.2. Transforming of the State Equation to Algebraic Constraints
3.3. Approximation of Performance Indicators and Constraints
3.4. hp Adaptive Error Evaluation Criteria
3.5. Estimation of the Polynomial Order
3.6. hp Adaptive Iteration Strategy
4. Numerical Simulations and Experimental Verification
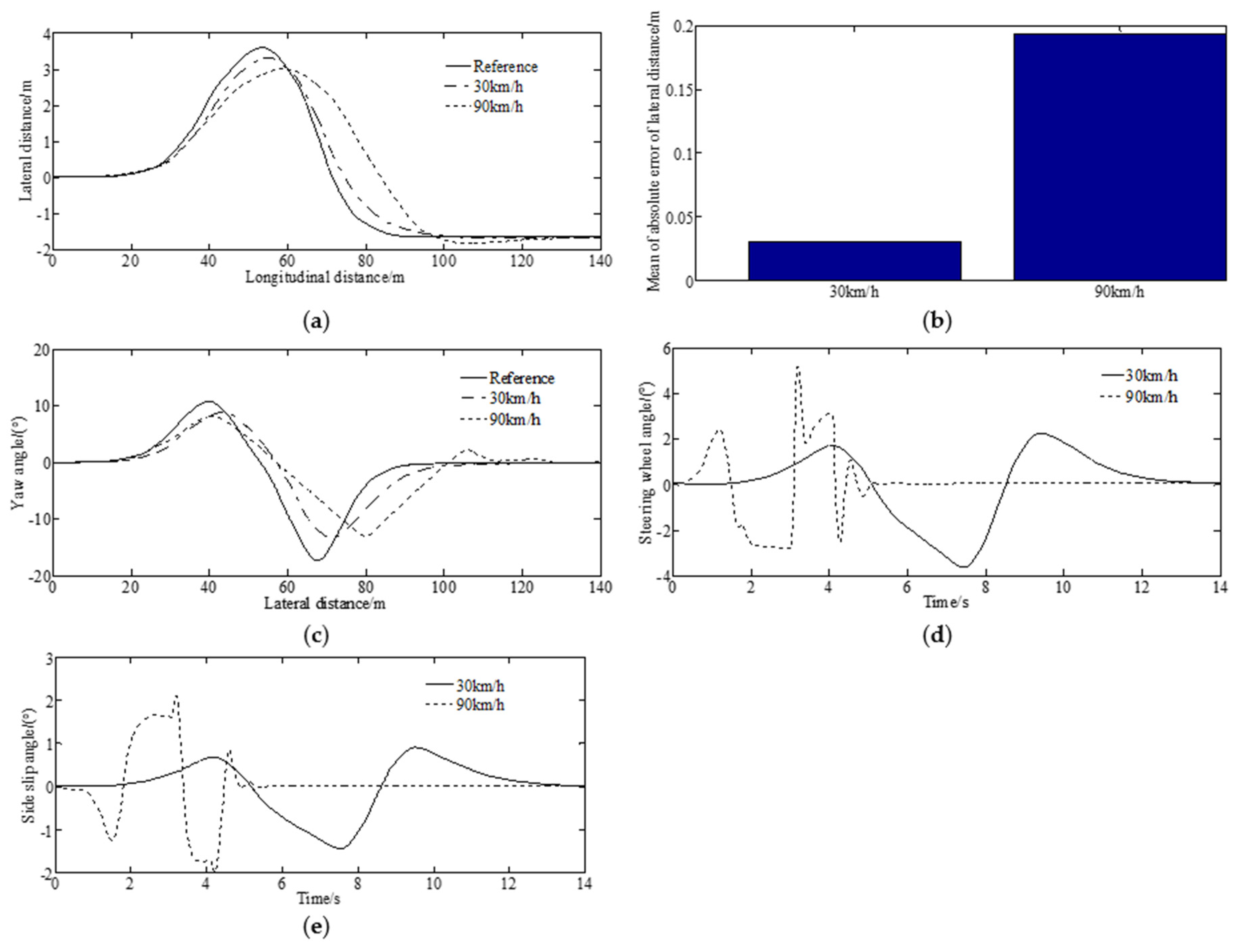
4.1. Numerical Simulations
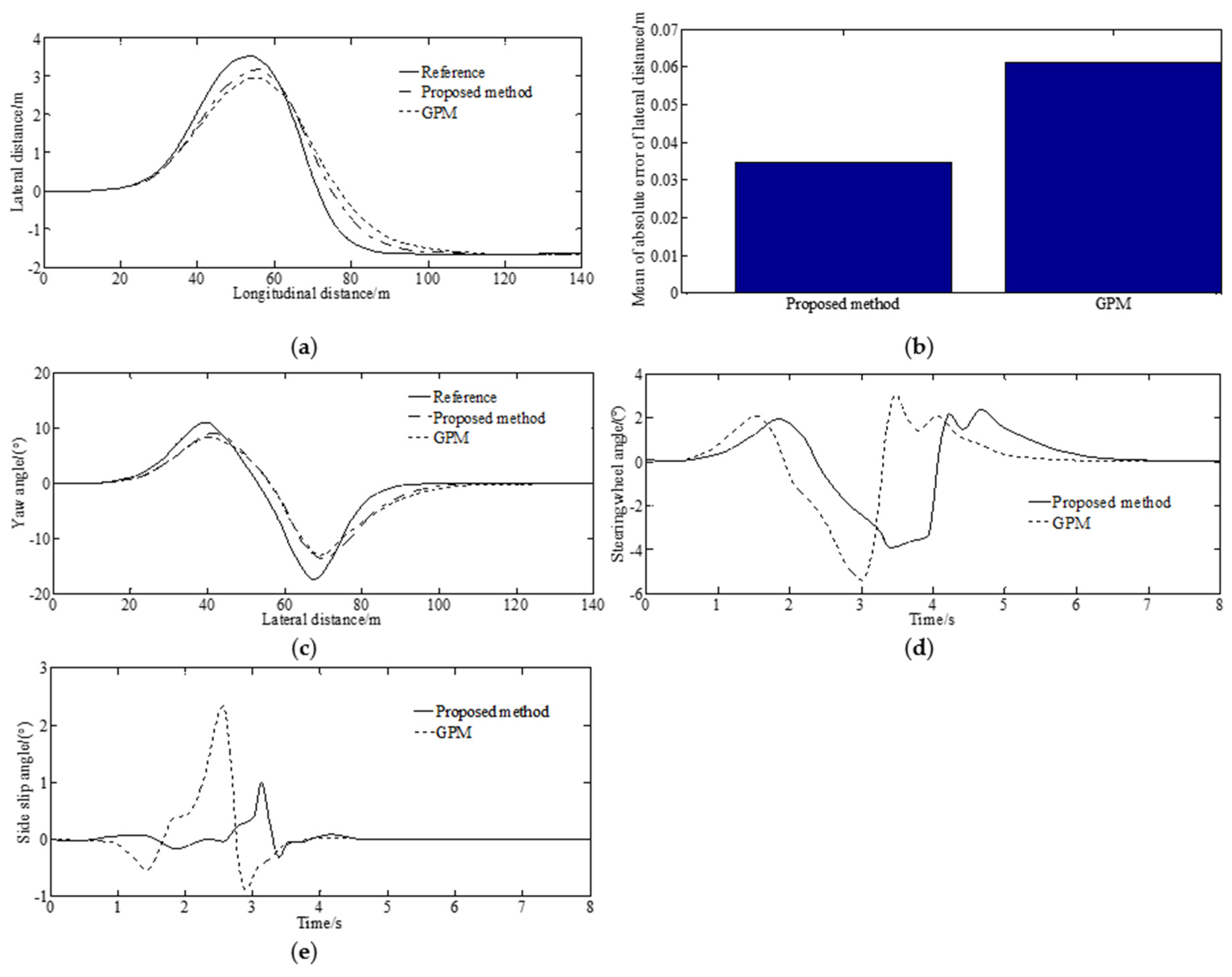
4.2. Control Performance
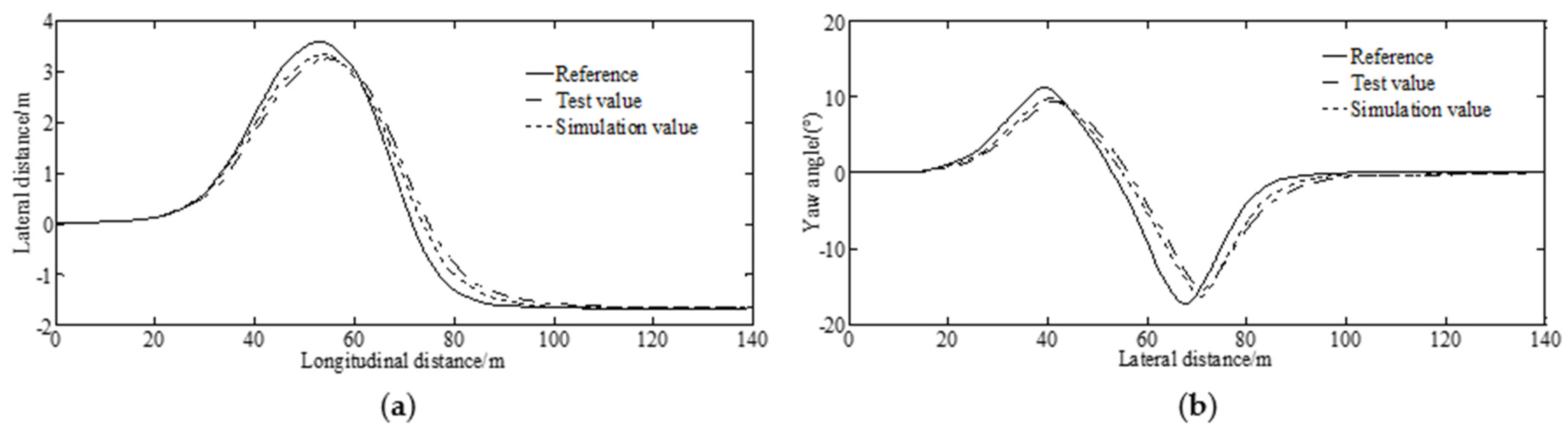
4.3. Experimental Verification
- (1)
- Accurate. The mathematical model of the Carsim is based on decades of research on vehicle dynamics characteristics. And with the continuous addition of new features, research is also ongoing. OEM users unanimously believe that the predicted results of CarSim are almost consistent with the actual test results.
- (2)
- Good scalability. The mathematical model of the Carsim covers the entire vehicle system, as well as input parameters from the driver, ground, and aerodynamics. These models can use built-in Vehicle Sim commands, MATLAB/SIMULINK(2018) from Mathworks, Lab VIEW from National Instruments (NI), as well as custom programs in Visual Basic, C language, and other languages to add higher-level control methods or extend existing subsystem and component models, such as tires, brakes, powertrains, etc.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, Y.J.; Cui, D.W.; Peng, W. Optimum Control for Path Tracking Problem of Vehicle Handling Inverse Dynamics. Sensors 2023, 23, 6673. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.J.; Cui, D.W. Estimation algorithm for vehicle state estimation using ant lion optimization algorithm. Adv. Mech. Eng. 2022, 14, 1–11. [Google Scholar] [CrossRef]
- Liu, Y.J.; Cui, D.W.; Peng, W. Optimal Lane Changing Problem of Vehicle Handling Inverse Dynamics Based on Mesh Refinement Method. IEEE Access 2023, 11, 115617–115626. [Google Scholar] [CrossRef]
- Zhao, S.E.; Hu, H.Y.; Jing, D.Y. Stability Control of Distributed Drive Electric Vehicle Based on AFS/DYC Coordinated Control. J. Huaqiao Univ. 2021, 42, 571–579. [Google Scholar]
- Lu, M.X.; Xu, Z.C. Integrated handling and stability control with AFS and DYC for 4WID-EVs via dual sliding mode control. Autom. Control Comput. Sci. 2021, 55, 243–252. [Google Scholar]
- Gao, X.; Ma, Y.; Toshiyuki, S.; Huang, H. Lateral coupling model of automatic platooning based on vehicle to vehicle communication. Automot. Eng. 2021, 43, 1745–1751. [Google Scholar]
- Fassbender, D.; Heinrich, B.C.; Luettel, T.; Wuensche, H.-J. An optimization approach to trajectory generation for autonomous vehicle following. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 3675–3680. [Google Scholar]
- Wei, S.; Zou, Y.; Zhang, X.; Zhang, T.; Li, X. An integrated longitudinal and lateral vehicle following control system with radar and vehicle-to-vehicle communication. IEEE Trans. Veh. Technol. 2019, 68, 1116–1127. [Google Scholar] [CrossRef]
- Liu, Y.; Zong, C.; Zhang, D. Lateral control system for vehicle platoon considering vehicle dynamic characteristics. IET Intell. Transp. Syst. 2019, 13, 1356–1364. [Google Scholar] [CrossRef]
- Chen, W.; Zhao, C.; Dai, G.; Zhao, Z. A partially flexible virtual trailer link model for vehicle-following systems. Trans. Inst. Meas. Control 2015, 37, 273–281. [Google Scholar] [CrossRef]
- Bayuwindra, A.; Aakre, O.L.; Ploeg, J.; Nijmeijer, H. Combined lateral and longitudinal CACC for a unicycle-type platoon. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gotenburg, Sweden, 19–22 June 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 527–532. [Google Scholar]
- Duan, Y.; Zhang, Y.; Wang, Y.; Zeng, J.; Xu, P. A light-duty truck model for the analysis of on-center handling characteristics. Int. J. Veh. Perform. 2022, 8, 147–165. [Google Scholar] [CrossRef]
- Park, M.; Lee, S.; Han, W. Development of steering control system for autonomous vehicle using geometry based path tracking algorithm. ETRI J. 2015, 37, 617–628. [Google Scholar] [CrossRef]
- Kigezi, T.N.; Alexandru, S.; Mugabi, E.; Musasizi, P.I. Sliding mode control for tracking of nonholonomic wheeled mobile robots. In Proceedings of the IEEE 2015 5th Australian Control Conference (AUCC), Gold Coast, Australia, 5–6 November 2015; IEEE: New York, NY, USA, 2015; pp. 21–26. [Google Scholar]
- Li, L.; Song, K.; Tang, G.; Xue, W.; Xie, H.; Ma, J. Active disturbance rejection path tracking control of vehicles with adaptive observer bandwidth based on Q-learning. Control Eng. Pract. 2025, 154, 106137. [Google Scholar] [CrossRef]
- Wang, X.; Fu, M.; Ma, H.; Yang, Y. Lateral control of autonomous vehicles based on fuzzy logic. Control Eng. Pract. 2015, 34, 1–17. [Google Scholar] [CrossRef]
- Ren, Y.; Zheng, L.; Zhang, W.; Yang, W.; Xiong, Z. A study on active collision avoidance control of autonomous vehicles based on model predictive control. Automot. Eng. 2019, 41, 48–54. [Google Scholar]
- Chen, Y.; Zhang, H.; Zou, W.; Zhang, H.; Zhou, B.; Xu, D. Dynamic modeling and learning based path tracking control for ROV-based deep-sea mining vehicle. Expert Syst. Appl. 2025, 262, 125612. [Google Scholar] [CrossRef]
- Li, D.; Leung, M.-F.; Tang, J.; Wang, Y.; Hu, J.; Wang, S. Generative Self-Supervised Learning for Cyberattack-Resilient EV Charging Demand Forecasting. IEEE Trans. Intell. Transp. Syst. 2025, 1–10. [Google Scholar] [CrossRef]
- Cai, Y.; Li, J.; Sun, X.; Chen, L.; Jiang, H.; He, Y.; Chen, X. Research on hybrid control strategy for intelligent vehicle path tracking. China Mech. Eng. 2020, 31, 289–298. [Google Scholar]
- Salzmann, F.; Gadi, S.; Gundlach, I. Racing line optimisation for an advanced driver assistance system. Int. J. Veh. Perform. 2021, 8, 46–73. [Google Scholar] [CrossRef]
- Croce, A.I.; Musolino, G.; Rindone, C.; Vitetta, A. Traffic and Energy Consumption Modelling of Electric Vehicles: Parameter Updating from Floating and Probe Vehicle Data. Energies 2022, 15, 82. [Google Scholar] [CrossRef]
- Liu, Y.J.; Cui, D.W.; Xie, C.L. Optimal control of lane changing problem of intelligent Vehicle. J. Vibroeng. 2025, 27, 120–133. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition | Value |
|---|---|---|
| m (kg) | vehicle mass | 1265 |
| Iz (kg∙m2) | moment of inertia around the z axis | 1800 |
| a (m) | distances of front axle from the center of gravity | 1.170 |
| b (m) | distances of rear axle from the center of gravity | 1.195 |
| k1 (N∙rad−1) | synthesized stiffness of front tire | 60,042 |
| k2 (N∙rad−1) | synthesized stiffness of rear tire | 109,295 |
| Iw (kg∙m2) | moment of inertia of the steering system | 16.38 |
| front wheel aligning arm of force | 0.021 | |
| hg (m) | height of the center gravity | 0.53 |
| Method | /10−5 | /s | Number of Iterations | |||
|---|---|---|---|---|---|---|
| 10−3 | p | 1 | 20 | 93.25 | 3.9011 | 35 |
| h | 5 | 4 | 52.98 | 2.5112 | 28 | |
| Improved hp | 5 | 4 | 52.79 | 3.2178 | 30 | |
| 10−4 | p | 1 | 20 | 9.879 | 18.0531 | 165 |
| h | 5 | 4 | 6.136 | 22.6529 | 96 | |
| Improved hp | 5 | 4 | 5.765 | 5.4912 | 70 | |
| 10−5 | h | 5 | 4 | 0.936 | 14.2887 | 128 |
| Improved hp | 5 | 4 | 0.643 | 7.0699 | 73 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Wang, Q. Trajectory Tracking in Autonomous Driving Based on Improved hp Adaptive Pseudospectral Method. World Electr. Veh. J. 2025, 16, 262. https://doi.org/10.3390/wevj16050262
Liu Y, Wang Q. Trajectory Tracking in Autonomous Driving Based on Improved hp Adaptive Pseudospectral Method. World Electric Vehicle Journal. 2025; 16(5):262. https://doi.org/10.3390/wevj16050262
Chicago/Turabian StyleLiu, Yingjie, and Qianqian Wang. 2025. "Trajectory Tracking in Autonomous Driving Based on Improved hp Adaptive Pseudospectral Method" World Electric Vehicle Journal 16, no. 5: 262. https://doi.org/10.3390/wevj16050262
APA StyleLiu, Y., & Wang, Q. (2025). Trajectory Tracking in Autonomous Driving Based on Improved hp Adaptive Pseudospectral Method. World Electric Vehicle Journal, 16(5), 262. https://doi.org/10.3390/wevj16050262