
Autoplant—Autonomous Site Preparation and Tree Planting for a Sustainable Bioeconomy

 , , , , , , ,
, , , , , , ,
Abstract
1. Introduction
- The Climate Challenge: Improving planting spots and seedling survival rates results in quicker establishment of new forests following harvesting, thereby reducing carbon dioxide emissions [6,7,8]. The increased precision in site preparation and planting further improves energy efficiency due to a much smaller area proportion of the soil being processed.
- The Environmental Challenge: Precision site preparation and more precise regeneration planning significantly reduce the area proportion of soil disturbance by only affecting the area closest to the planted seedlings. This benefits environmental and cultural conservation (less damage to cultural remains), as well as other forest values, such as recreation, berry picking, and reindeer herding [22].
- The Work Environment Challenge: Automation eliminates harmful whole-body vibrations associated with off-road driving, and a safer work environment is promoted.
- The Workforce and Gender Equality Challenge: New work tasks and lighter workloads may attract new demographic groups to forest work. In the future, the remote handling of certain tasks could contribute to a better balance between work and family life.
2. The Autoplant Concept
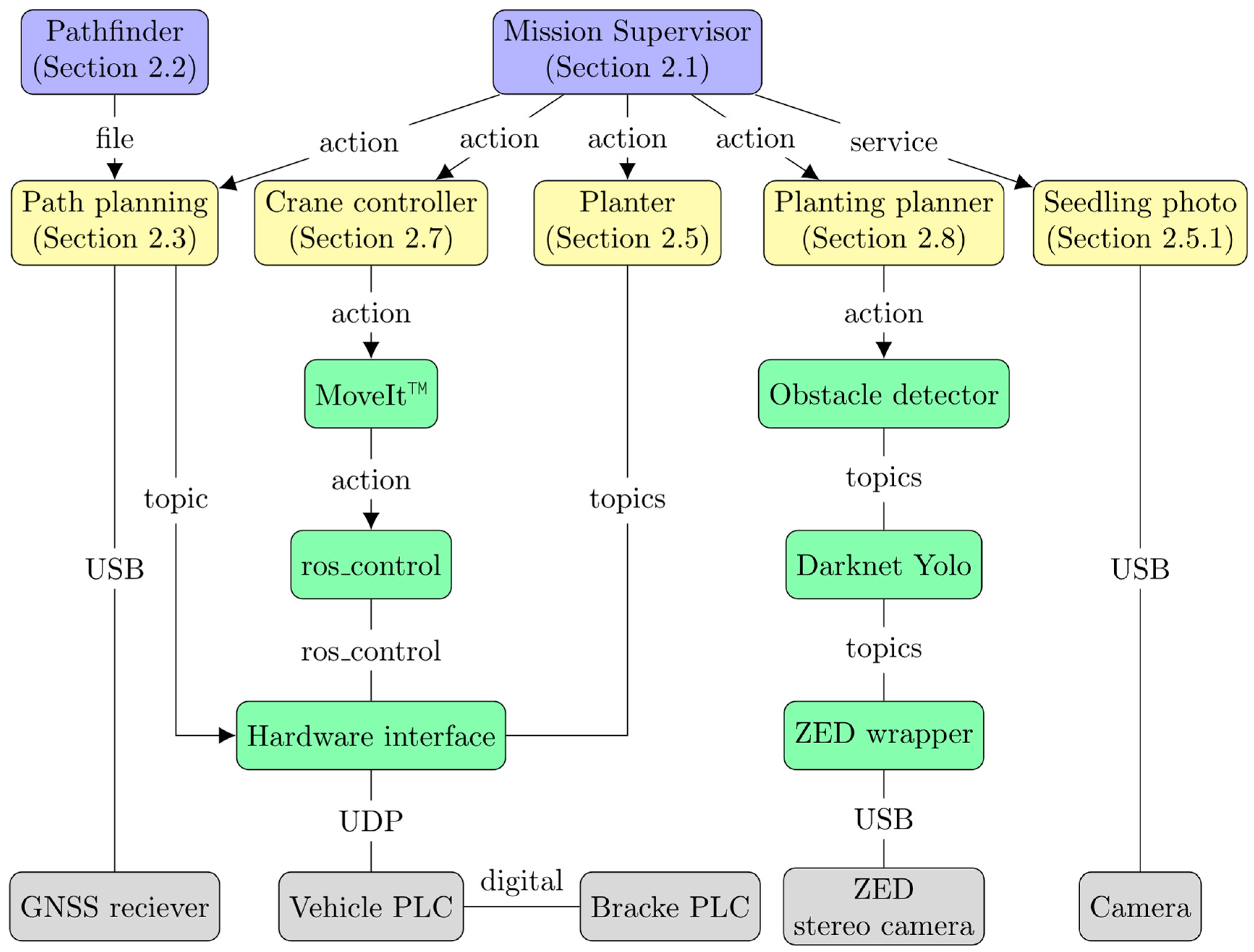
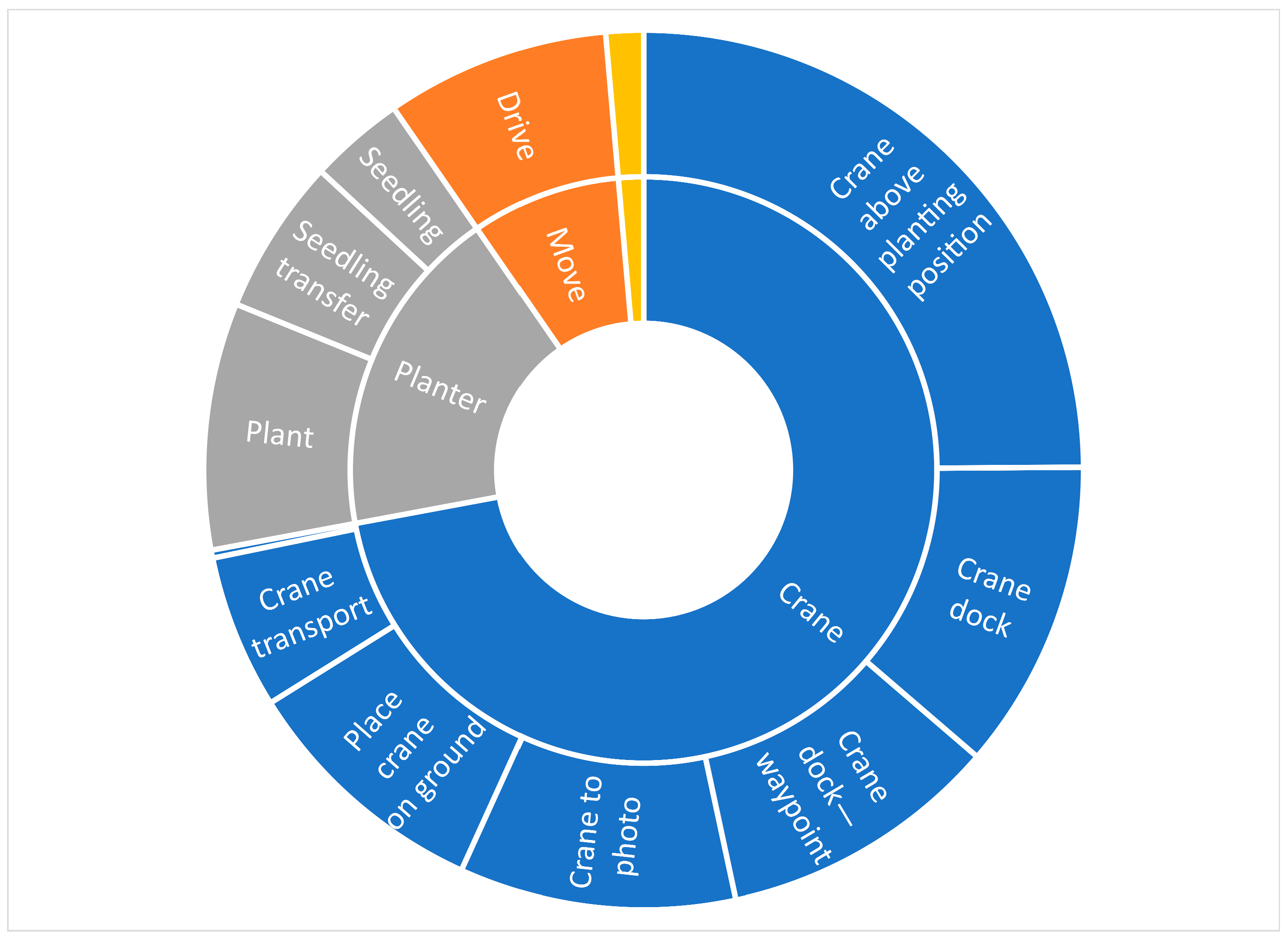
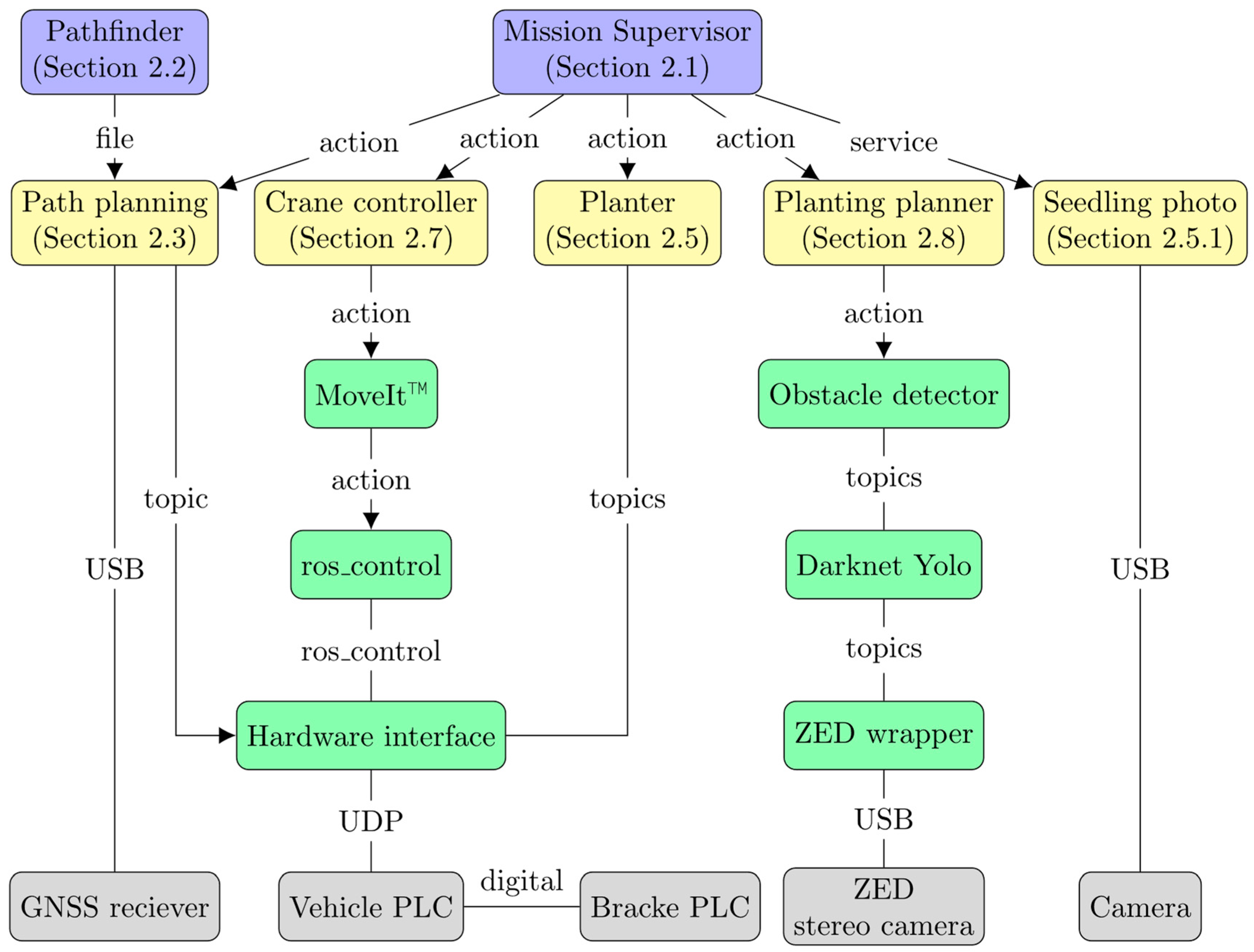
2.1. The Brain of the Machine—Mission Supervisor
- The Crane Controller performs TRANSPORT to place the crane in the transport position.
- The Path Planner performs NEXT_POS, which makes a local path and autonomously moves the machine a predefined distance along the planned path. If the path has reached the final point, the execution goes to standby. Otherwise, the machine stops and initiates planting operations in this new staging area.
- Now, the crane performs DOCK to place the crane in docking position. Meanwhile, the Planter performs TRANSFER to pick a seedling from the local storage.
- When the crane is in position, the Planter performs DROP to load itself. Meanwhile, the Planting Planner performs PHOTO_WORKAREA followed by ADD_OBSTACLES to map the obstacles in the staging area.
- The Planting Planner performs GET_POSITION to find a free position for planting. If no free position is found, the machine will restart at Step 1 and move to a new position.
- The Crane Controller performs POSITION_ABOVE_SEEDLING followed by POSITION_ON GROUND to place the Planter on the ground using ground pressure sensing.
- The Planter performs PLANT to scarify and plant the seedling.
- The Crane Controller performs PHOTO_SEEDLING to place the crane above the plant to take a photo.
- The Seedling Photo performs TAKE_PHOTO to take a photo of the planting spot.
- The Planting Planner performs SAVE_SUCCESS, SAVE_FAIL_SCAR, SAVE_FAIL_GROUND, or SAVE_FAIL_CRANE depending on the outcome of the planting.
- If the attempt failed, and the seedling is still intact, the Planting Planner loops back to Step 6 and performs GET_POSITION. However, if the planting was successful, the execution loops back to Step 3 to load a new seedling instead. This time around, there will be no new detection of obstacles in the staging area. All the planting attempts have already been saved based on the Planter’s location, and no visual identification is needed to localize the seedlings.
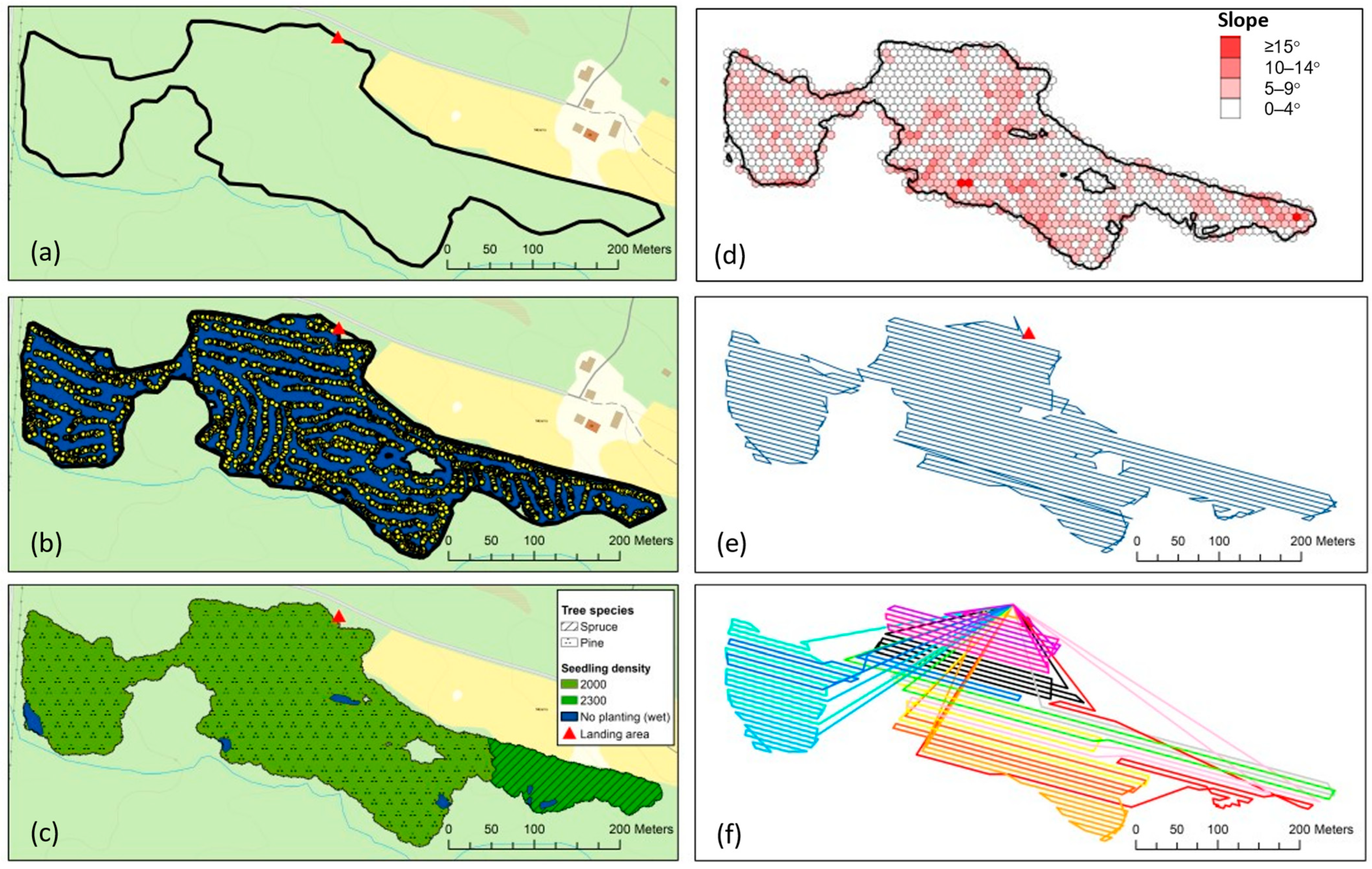
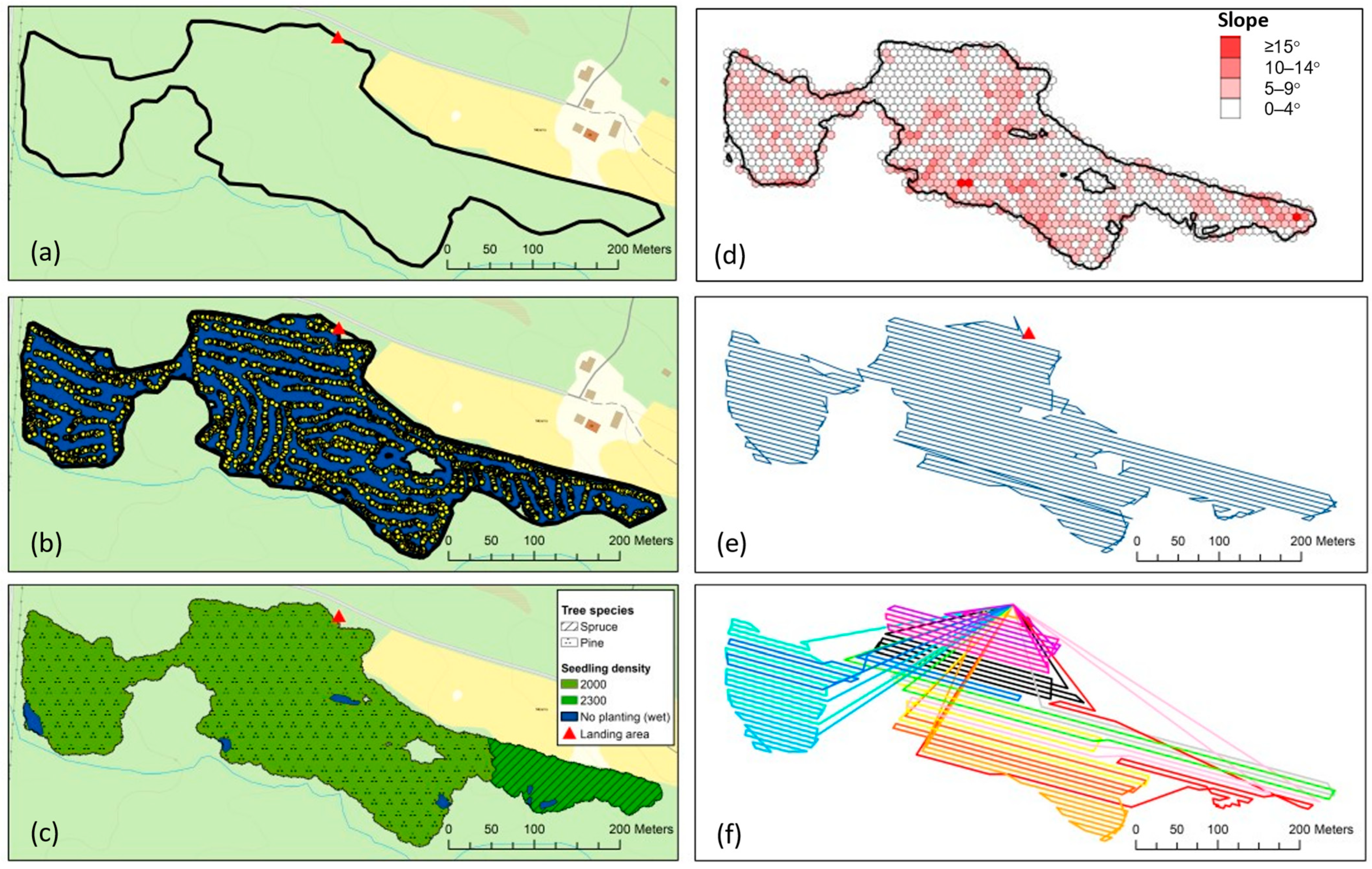
2.2. Pathfinder—Regeneration and Route Planning
2.2.1. PlantP
2.2.2. PathP
2.2.3. Pathfinder Results
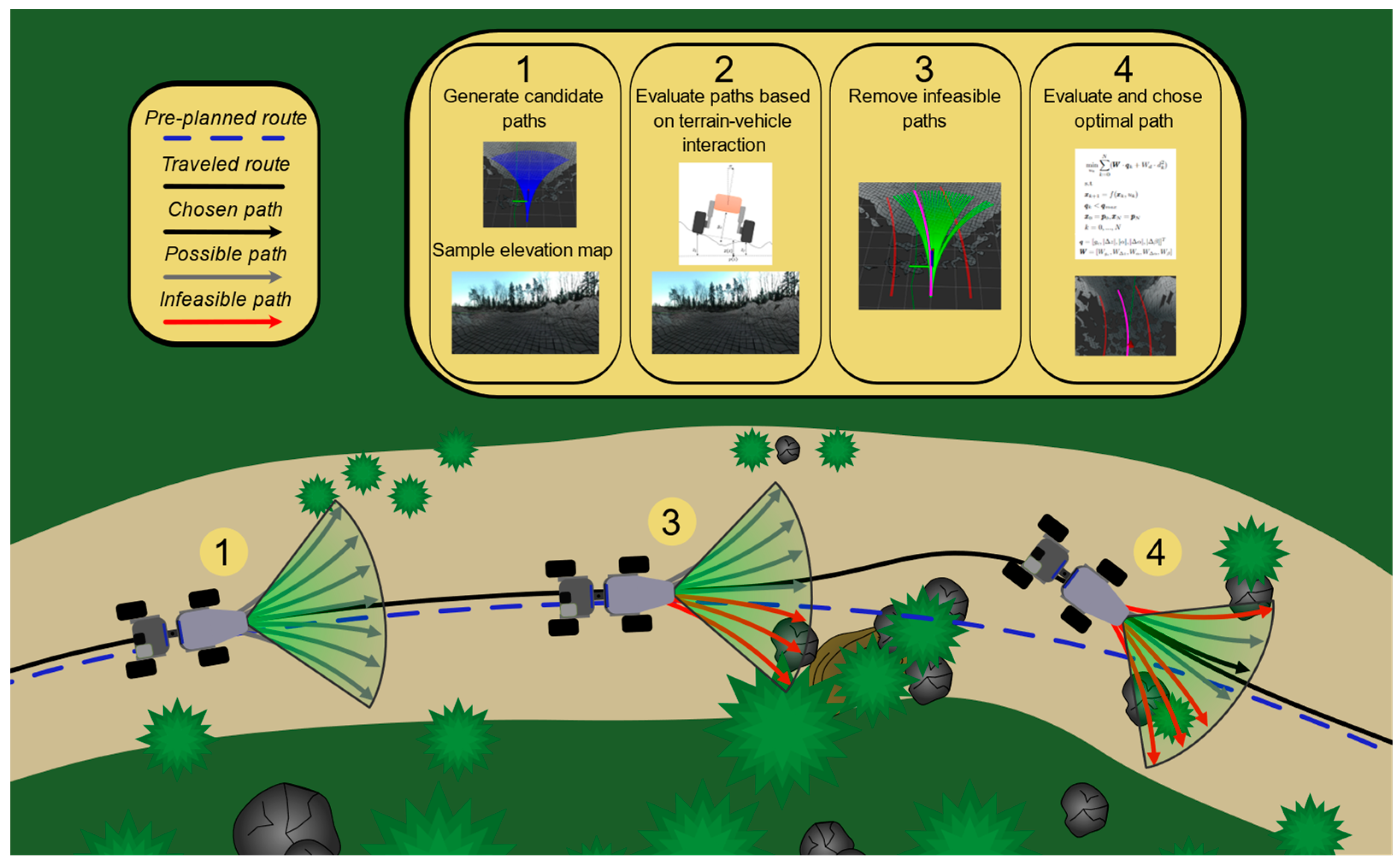
2.3. The Path Planner—Autonomous Navigation
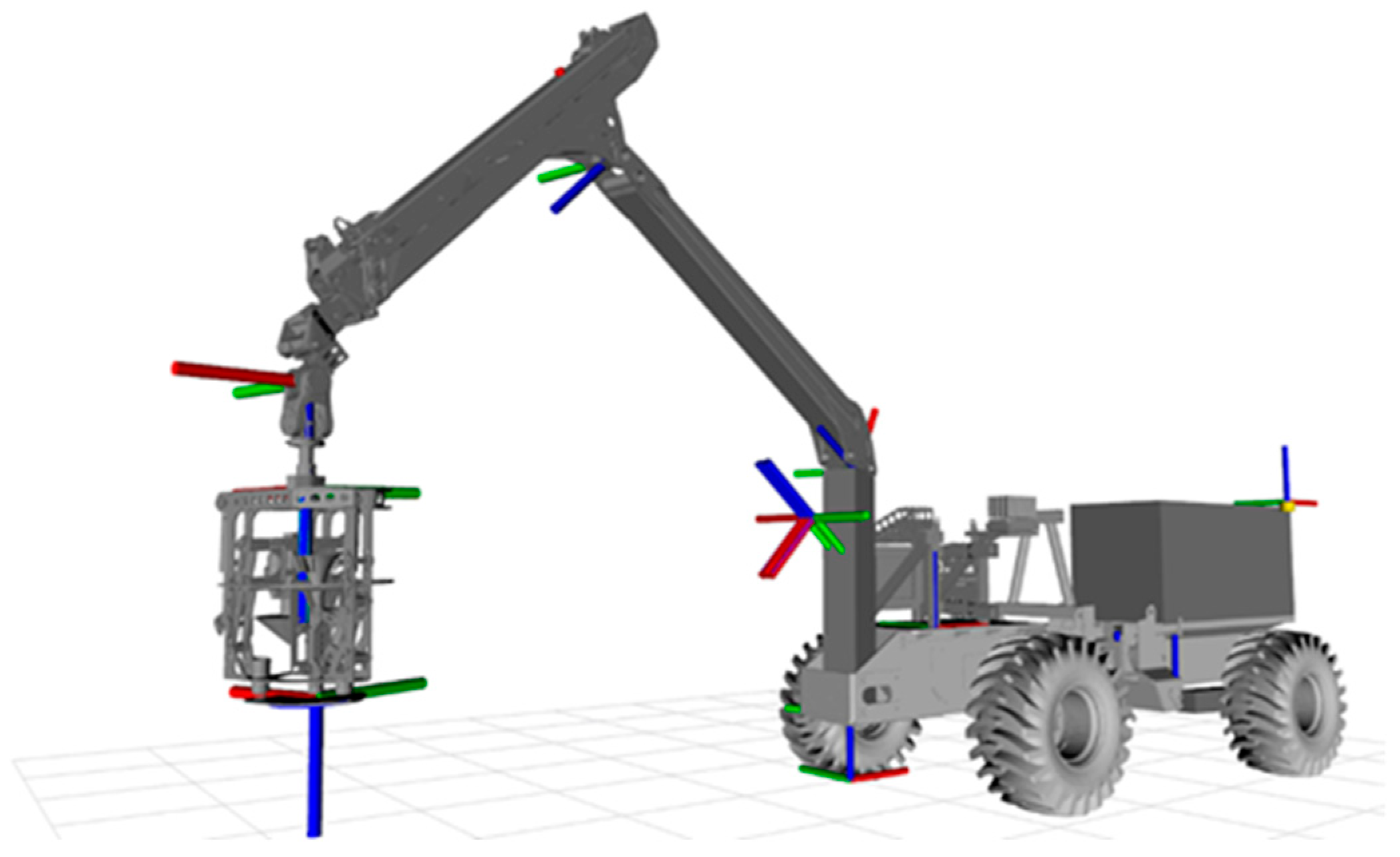
2.4. The Terrain Vehicle Platform
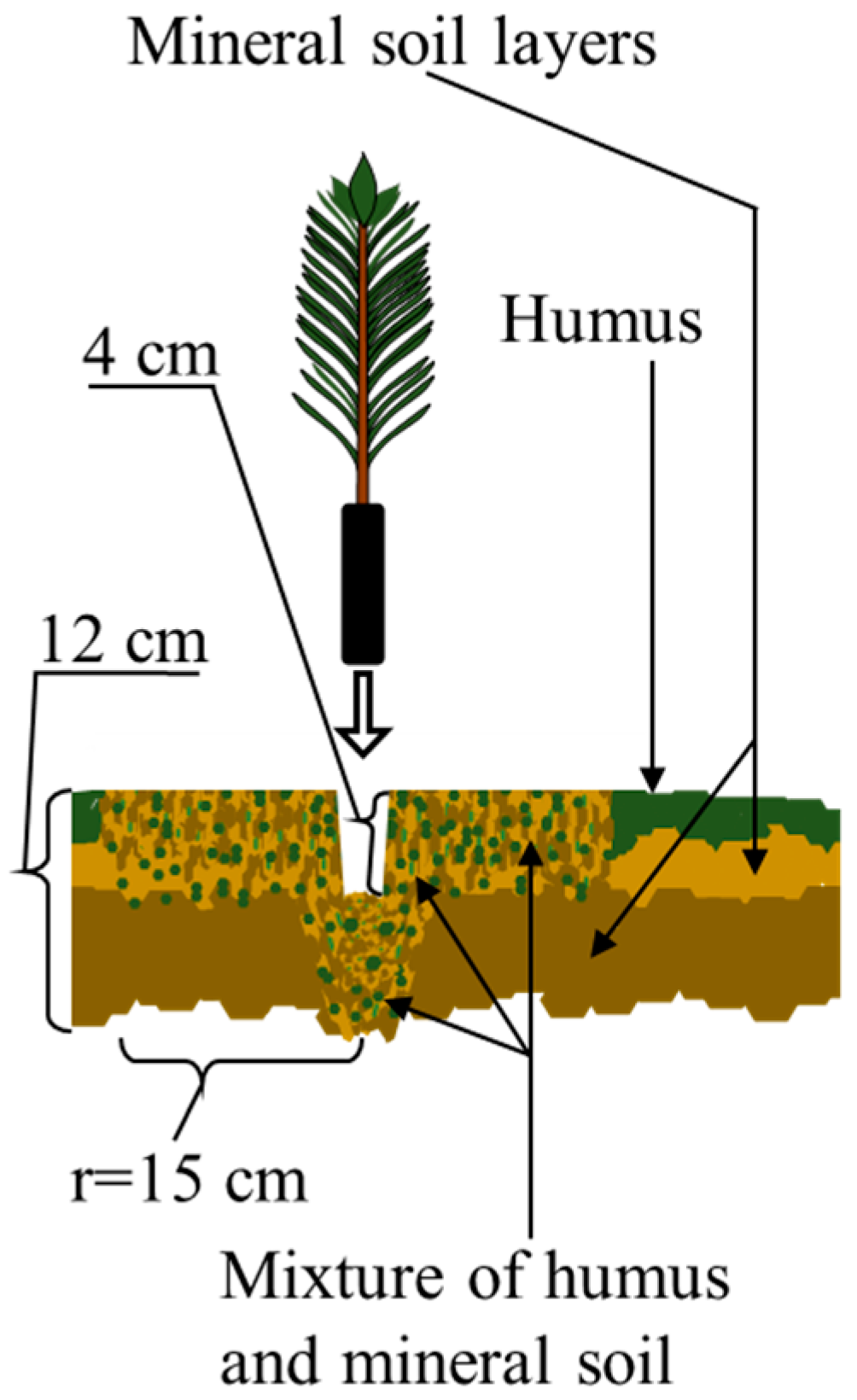
2.5. The Planter—New Technology for Forest Regeneration with Low Environmental Impact
Camera for Following Up Planting
2.6. Automatic Seedling Transfer
2.7. The Crane Controller—Motion Planning of the Crane
2.8. The Planting Planner—Detection of Planting Spots
3. Integration Tests and Experiments
3.1. Integration Tests at a Forest Regeneration Area
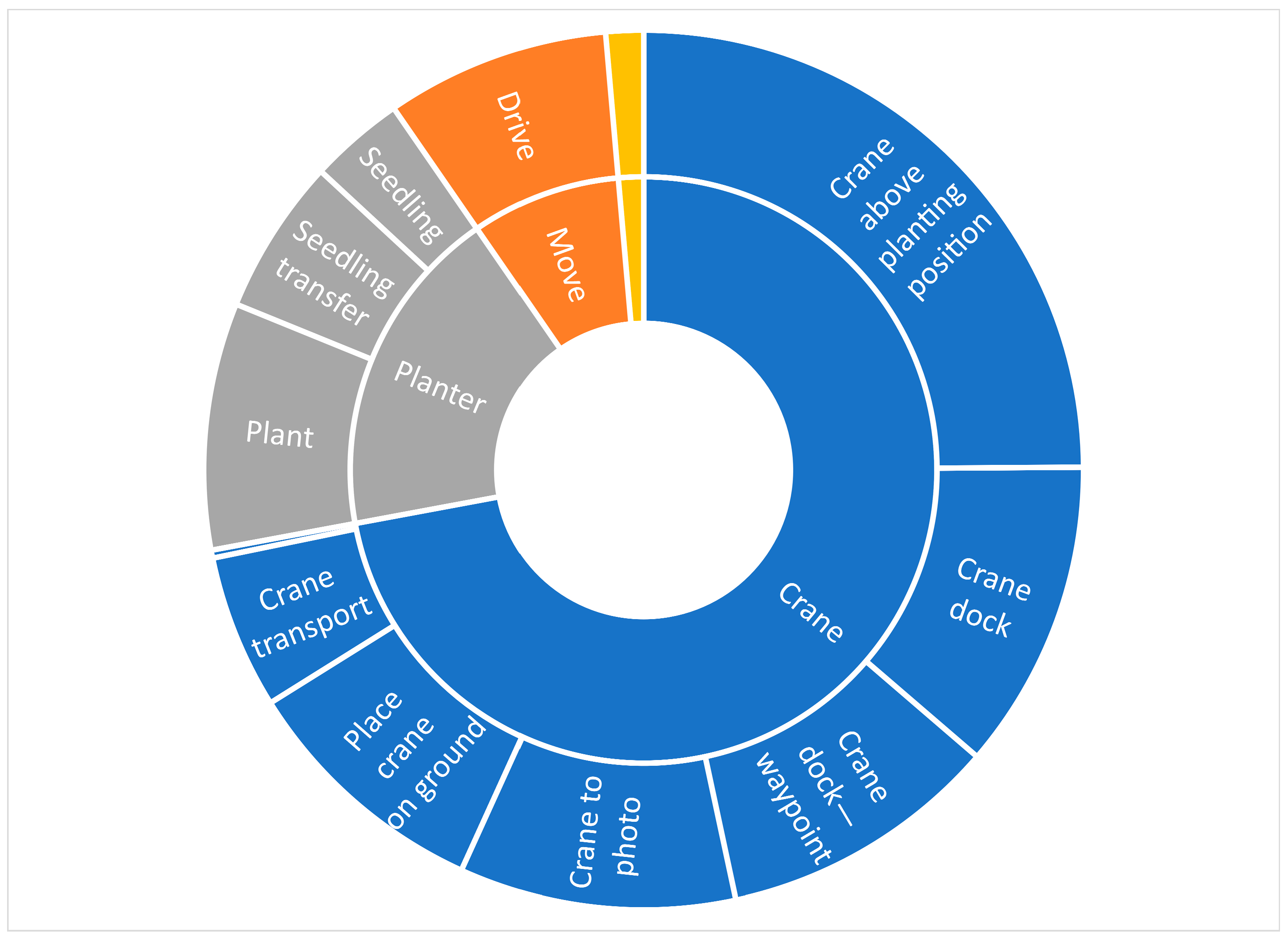
3.2. Field Experiment
4. System Analysis
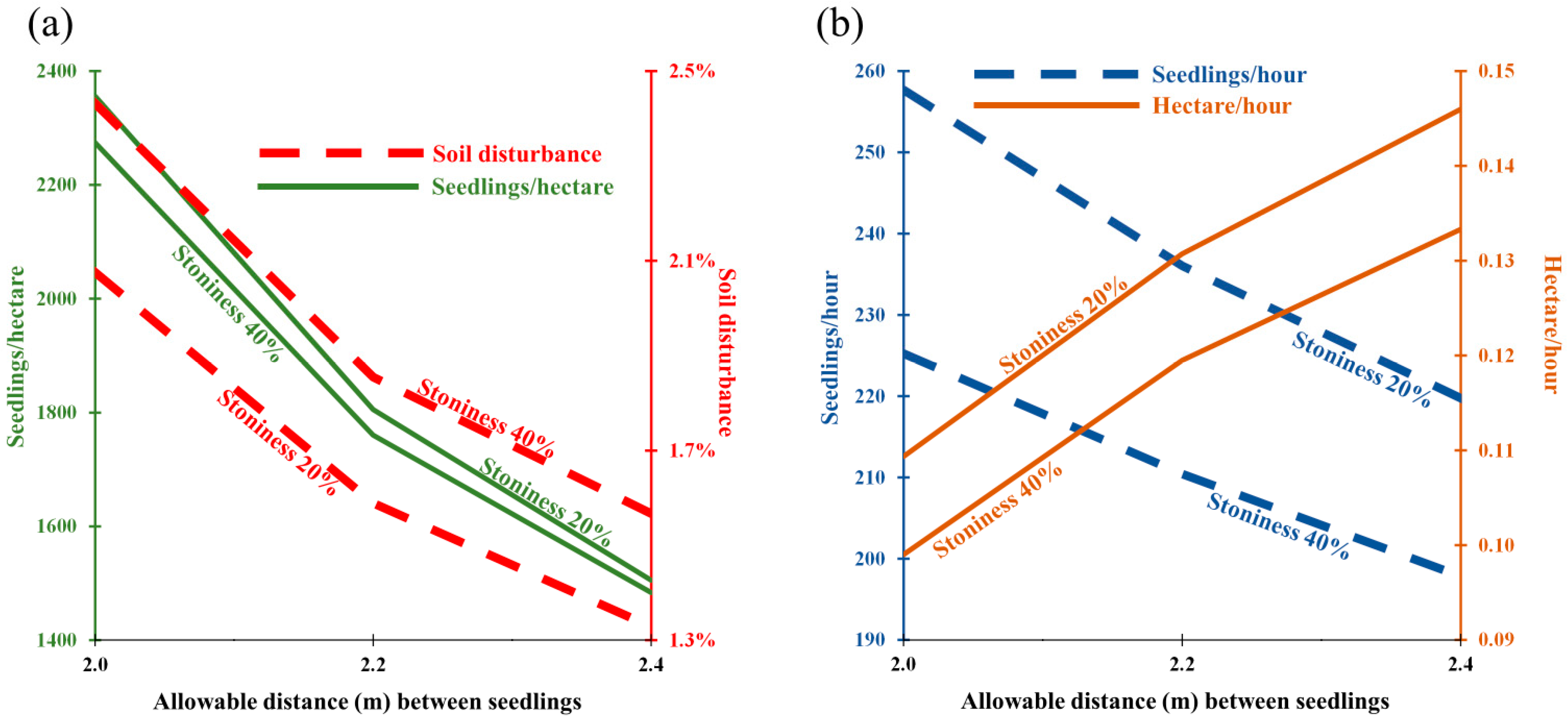
4.1. Modeling the Machine–Soil Interaction
4.2. Simulation Results
5. How the Autoplant Concept Helps Solve Societal Challenges
6. Opportunities Afforded by the Autoplant Subsystems
7. Challenges Still Facing the Autoplant Concept
- Robustness needs to increase in all sensors and subsystems, as reducing machine down-time has been identified as an important factor for planting machine productivity [16]. The forest environment is rough, and mechanical site preparation produces dust that can affect cameras and sensors. Vibrations when traversing the terrain, as well as every time the Planter hits stones and boulders, also put great strain on the equipment. Different weather conditions and different sun angles also increase the amount of training data needed to create a system that can operate in all conditions. Precision in detecting objects and their size and placement around the machine also needs to increase. For example, fusing sensor data from several sources with filtering techniques can counteract drawbacks caused by poor data from individual sensors [56].
- Instead of a crane, the machine needs one or several fast arms to carry the Planter(s) and plant enough seedlings every hour. Autonomous machines may not have the same productivity demands as manually operated machines or tools, but operators are needed to start up the machines, monitor them, and reload them with seedlings. The machine productivity must compensate for the costs of its capital and energy use. Reaching a high level of productivity is a key factor for success [16]. From the time study (Section 3.2), it is evident that the concept needs a fast actuator (crane or robotic arm) to move the Planter into position quickly. It would also be beneficial if the Planter could carry at least the quantity of seedlings needed to plant a staging area and collect more seedlings while the machine moves to the next staging area. If the investment cost can be kept down and the size allows for easy transportation between regeneration areas, it would be possible for an operator to handle three machines at the same time with the Autoplant concept [48].
- A suitable commercial base machine is needed for the concept. The vehicle platform developed by LTU and used in this project was developed to serve as a base for off-road automation research and is not designed to be a commercial product. The size may be appropriate for the task, but more research is needed to evaluate its accessibility in rough terrain. The base machine in the Autoplant concept needs to fulfill the hydraulic demand of the Planter, store at least 1500 seedlings, and be able to traverse rough terrain with boulders and stumps. There are large machines, for example, forwarders, which manage these tasks today, but few lighter and cheaper base machines with good terrain capability are available on the market. Future research includes finding the optimal setup for this kind of lighter terrain vehicle.
- To enable autonomous forestry systems in Sweden, legislation must change. Today, an operating area needs to be fenced off with, at minimum, continuous hazard warning tape. The cost of putting up the tape on fence posts is enough to ruin the economy of the entire regeneration operation. New regulations and safety systems are needed where, for example, geofencing [57] can replace physical fencing. The safety systems developed in other projects need to reach a level where they can detect humans and larger mammals within the safety zone of the machine.
- Previous research has identified seedling packaging, transport, and transfer as a bottleneck in the breakthrough of mechanical planting [16,34,35,58]. If seedling trays were optimized for mechanical planting and the handling systems were more cost-efficient, the potential for mechanized planting would increase [16,59,60]. However, the automatic seedling transfer in the Autoplant concept allows for efficient seedling transfer with the present Hiko-tray system.
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schulze, E.-D.; Wirth, C.; Heimann, M. Managing forests after Kyoto. Science 2000, 289, 2058–2059. [Google Scholar] [CrossRef]
- Janssens, I.A.; Freibauer, A.; Ciais, P.; Smith, P.; Nabuurs, G.-J.; Folberth, G.; Schlamadinger, B.; Hutjes, R.W.A.; Ceulemans, R.; Schulze, E.D.; et al. Europe’s Terrestrial Biosphere Absorbs 7 to 12% of European Anthropogenic CO2 Emissions. Science 2003, 300, 1538–1542. [Google Scholar] [CrossRef]
- Jandl, R.; Lindner, M.; Vesterdal, L.; Bauwens, B.; Baritz, R.; Hagedorn, F.; Johnson, D.W.; Minkkinen, K.; Byrne, K.A. How strongly can forest management influence soil carbon sequestration? Geoderma 2007, 137, 253–268. [Google Scholar] [CrossRef]
- Gustavsson, L.; Haus, S.; Lundblad, M.; Lundström, A.; Ortiz, C.A.; Sathre, R.; Truong, N.L.; Wikberg, P.-E. Climate change effects of forestry and substitution of carbon-intensive materials and fossil fuels. Renew. Sustain. Energy Rev. 2017, 67, 612–624. [Google Scholar] [CrossRef]
- Ali, N.; Jaffar, A.; Anwer, M.; Khan, S.; Anjum, M.; Hussain, A.; Raja, M.; Ming, X. The greenhouse gas emissions produced by cement production and its impact on environment: A review of global cement processing. Int. J. Res. 2015, 2, 488–500. [Google Scholar]
- Mjöfors, K.; Strömgren, M.; Nohrstedt, H.Ö.; Johansson, M.B.; Gärdenäs, A.I. Indications that site preparation increases forest ecosystem carbon stocks in the long term. Scand. J. For. Res. 2017, 32, 717–725. [Google Scholar] [CrossRef]
- Mäkipää, R.; Abramoff, R.; Adamczyk, B.; Baldy, V.; Biryol, C.; Bosela, M.; Casals, P.; Curiel Yuste, J.; Dondini, M.; Filipek, S.; et al. How does management affect soil C sequestration and greenhouse gas fluxes in boreal and temperate forests?—A review. For. Ecol. Manag. 2023, 529, 120637. [Google Scholar] [CrossRef]
- Sikström, U.; Hjelm, K.; Holt Hanssen, K.; Saksa, T.; Wallertz, K. Influence of mechanical site preparation on regeneration success of planted conifers in clearcuts in Fennoscandia—A review. Silva Fenn. 2020, 54, 10172. [Google Scholar] [CrossRef]
- Sutton, R.F. Mounding site preparation: A review of European and North American experience. New For. 1993, 7, 151–192. [Google Scholar] [CrossRef]
- Örlander, G.; Gemmel, P.; Hunt, J. Site preparation: A Swedish overview. In FRDA Report; BC Ministry of Forests: Squamish, BC, Canada, 1990; pp. 1–61. [Google Scholar]
- Ersson, B.T.; Cormier, D.; St-Amour, M.; Guay, J. The impact of disc settings and slash characteristics on the Bracke three-row disc trencher’s performance. Int. J. For. Eng. 2017, 28, 1–9. [Google Scholar] [CrossRef]
- Nordlander, G.; Örlander, G.; Petersson, M.; Hellqvist, C. Skogsskötselåtgärder mot Snytbagge. Available online: http://www2.ekol.slu.se/snytbagge/attachment/snytbaggehandbok_v1_3.pdf (accessed on 1 December 2023).
- Ramantswana, M.; Guerra, S.P.S.; Ersson, B.T. Advances in the Mechanization of Regenerating Plantation Forests: A Review. Curr. For. Rep. 2020, 6, 143–158. [Google Scholar] [CrossRef]
- Forsmark, V.; Johannesson, T. Skogsvårdsföretagens Rekrytering. [Silvicultural Companies Recruitment]; 1039-2020; Skogforsk Arbetsrapport; Skogforsk: Uppsala, Sweden, 2020; p. 32. [Google Scholar]
- Sundblad, L.-G.; Hannerz, M.; Manner, J.; Ersson, B.T. Tidigare, Nuvarande och Framtida Planteringsmaskiner. [Mechanized Tree Planting: Past, Present, and Future Tree Planting Machines]; 1149-2023; Skogforsk Arbetsrapport; Skogforsk: Uppsala, Sweden, 2023; p. 27. [Google Scholar]
- Laine, T. Mechanized Tree Planting in Finland and Improving Its Productivity. Ph.D. Thesis, University of Helsinki, Helsinki, Finland, 2017. [Google Scholar]
- Tadeusiewicz, R.; Tylek, P.T.; Adamczyk, F.; Pietrzykowski, M.; Szewczyk, G.; Szychta, M.; Kielbasa, P.; Sobocki, S.; Danielak, M.; Juliszewski, T.; et al. RoboFoR—Automat do sadzenia drzew. Podstawowe moduly i wlasciwosci funkcjonalne. In Nauka—Technika—Technologia. Tom 6; AGH: Krakow, Poland, 2022; pp. 119–136. [Google Scholar]
- Tylek, P.; Kiełbasa, P.; Szulc, T.; Szychta, M.; Szczepaniak, J.; Wojciechowski, J.; Danielak, M.; Adamczyk, F.; Tadeusiewicz, R.; Juliszewski, T.; et al. Design of a Planting Module for an Automatic Device for Forest Regeneration. Croat. J. For. Eng. 2023, 44, 203–215. [Google Scholar] [CrossRef]
- Södra. Södra Utvecklar Planteringsmaskin med Lovande Resultat. Södra Develops Planting Machine with Promising Results. Available online: https://www.sodra.com/sv/se/om-sodra/pressrum/pressmeddelanden/sodra-utvecklar-planteringsmaskin-med-lovande-resultat/ (accessed on 4 December 2023).
- Hallonborg, U.; Hofsten, H.v.; Mattsson, S.; Hagberg, J.; Thorsen, Å.; Nyström, C.; Arvidsson, H. Maskinell Plantering Med Silva Nova—Nuvarande Status samt Utvecklingsmöjligheter i Jämförelse med Manuell Plantering. [Mechanized Planting with the Silva Nova Tree Planter—Recent State and Feasibility Compared with Manual Planting]; Skogforsk, the Forestry Research Institute of Sweden: Uppsala, Sweden, 1995; p. 97. [Google Scholar]
- Johansson, J.; Semberg, T. Mekanisk Planteringsmaskin lär sig ”se” var Plantan ska Sättas. Mechanical Planting Machine Learns to “See” Where to Plant. Available online: https://www.skogforsk.se/kunskap/kunskapsbanken/2022/planteringsmaskin-lar-sig-se-var-plantan-ska-sattas/ (accessed on 4 December 2023).
- Ersson, B.T.; Hansson, L.; Manner, J.; Sandström, P.; Sonesson, J. Forest management in northern Fennoscandia: The need for solutions that mitigate conflicts during forest regeneration and increase the use of continuous cover forestry. Silva Fenn. 2023, 57, 23053. [Google Scholar] [CrossRef]
- Robot Operating System (ROS). Melodic Main Webpage. Available online: http://wiki.ros.org/melodic (accessed on 29 May 2023).
- Rossander, M.; Lideskog, H. Design and Implementation of a Control System for an Autonomous Reforestation Machine Using Finite State Machines. Forests 2023, 14, 1340. [Google Scholar] [CrossRef]
- Bohren, J.; Cousins, S. The SMACH High-Level Executive [ROS News]. IEEE Robot. Autom. Mag. 2010, 17, 18–20. [Google Scholar] [CrossRef]
- Sörensen, R.; Johansson, F.; Gålnander, H. Ökad Skogsproduktion och Förbättrad Miljöhänsyn—Genom Anpassning till Lokala Förutsättningar [Increased Forest Production and Improved Conservation Measures—Through Adaptation to Local Conditions]; 1175-2023; Skogforsk Arbetsrapport; Skogforsk: Uppsala, Sweden, 2023; p. 67. [Google Scholar]
- Hansson, L.; Flisberg, P.; Rönnqvist, M.; Johansson, F.; Sörensen, R.; Rowell, A.; Jönsson, P. Pathfinder—A tool for operational planning of forest regeneration on clearcuts. In Proceedings of the 19th Symposium on Systems Analysis in Forest Resources Estes Park, Estes Park, CO, USA, 24–27 July 2022. [Google Scholar]
- Olsson, B.; Ledwith, M. National Land Cover Database (NMD) Product Description; Swedish Environmental Protection Agency: Stockholm, Sweden, 2020. [Google Scholar]
- Sten, G.; Feng, L.; Möller, B. A Reconfigurable Test Platform for Developing Autonomous articulated Pendulum-Arm Suspension Forest Machines. In Proceedings of the the 20th International and 9th Americas Conference of the International Society for Terrain-Vehicle Systems, Online, 27–29 September 2021. [Google Scholar]
- Fankhauser, P.; Bloesch, M.; Hutter, M. Probabilistic Terrain Mapping for Mobile Robots with Uncertain Localization. IEEE Robot. Autom. Lett. 2018, 3, 3019–3026. [Google Scholar] [CrossRef]
- Gerkey, B.P.; Konolige, K. Planning and control in unstructured terrain. In Proceedings of the ICRA workshop on path planning on costmaps, Pasadena, CA, USA, 19 May 2008. [Google Scholar]
- La Hera, P.M.; Trejo, O.M.; Lindroos, O.; Lindbäck, T.; Latif, S.; Li, S.; Karlberg, M. Exploring the Feasibility of Autonomous Forestry Operations: Results from the First Experimental Unmanned Machine. Authorea 2023. [Google Scholar] [CrossRef]
- Li, S.; Lideskog, H. Realization of autonomous detection, positioning and angle estimation of harvested logs. Croat. J. For. Eng. 2023, 44, 15. [Google Scholar] [CrossRef]
- Laine, T.; Saarinen, V.-M. Comparative study of the Risutec Automatic Plant Container (APC) and Bracke planting devices. Silva Fenn. 2014, 48, 1161. [Google Scholar] [CrossRef]
- Ersson, B.T.; Bergsten, U.; Lindroos, O. Reloading mechanized tree planting devices faster using a seedling tray carousel. Silva Fenn. 2014, 48, 1064. [Google Scholar] [CrossRef]
- van Westendorp, R. Development of a Transporting System for Seedlings Mounted on A Planting Device [Utveckling av ett System för Att Flytta Plantor från en Kassett till Planteringsröret på en Planteringsmaskin]. Master’s Thesis, Department of Natural Sciences, Mid Sweden University, Östersund, Sweden, 2021; pp. 1–162. [Google Scholar]
- Coleman, D.T.; Sucan, I.A.; Chitta, S.; Correll, N. Reducing the Barrier to Entry of Complex Robotic Software: A MoveIt! Case Study. J. Softw. Eng. Robot. 2014, 5, 3–16. [Google Scholar]
- Chitta, S.; Marder-Eppstein, E.; Meeussen, W.; Pradeep, V.; Rodríguez Tsouroukdissian, A.; Bohren, J.; Coleman, D.; Magyar, B.; Raiola, G.; Lüdtke, M.; et al. ros_control: A generic and simple control framework for ROS. J. Open Source Softw. 2017, 2, 456. [Google Scholar] [CrossRef]
- Li, S.; Lideskog, H. Implementation of a system for real-time detection and localization of terrain objects on harvested forest land. Forests 2021, 12, 1142. [Google Scholar] [CrossRef]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes (VOC) Challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef]
- Rossander, M.; Li, S.; Lideskog, H.; Hansson, L. Automatic plant position selector for forest regeneration machines. In Proceedings of the 55th International Symposium on Forest Mechanization (FORMEC) and the 7th Forest Engineering Conference (FEC), Florence, Italy, 20–22 September 2024. [Google Scholar]
- Macenski, S.; Foote, T.; Gerkey, B.; Lalancette, C.; Woodall, W. Robot Operating System 2: Design, architecture, and uses in the wild. Sci. Robot. 2022, 7, eabm6074. [Google Scholar] [CrossRef] [PubMed]
- Herlitz, A. Typbestånd i Slutavverkning. [Typestands for Clear Cutting]; Rapport nr 81; Institutionen för Skogsteknik, Skogshögskolan: Garpenberg, Sweden, 1975. [Google Scholar]
- Björkhem, U.; Lundeberg, G.; Scholander, J. Root Distribution and Compressive Strength in Forest Soils. Root Mapping and Plate Loading Tests in Thinning-Stage Stands of Norway Spruce; Rapporter och Uppsatser nr 22; Institutionen för Växtekologi och Marklära, Skogshögskolan: Stockholm, Sweden, 1975. [Google Scholar]
- Kalliokoski, T.; Nygren, P.; Sievänen, R. Coarse root architecture of three boreal tree species growing in mixed stands. Silva Fenn. 2008, 42, 189–210. [Google Scholar] [CrossRef]
- Stendahl, J.; Lundin, L.; Nilsson, T. The stone and boulder content of Swedish forest soils. CATENA 2009, 77, 285–291. [Google Scholar] [CrossRef]
- Lideskog, H.; Karlberg, M. Simulated continuous mounding improvements through ideal machine vision and control. Silva Fenn. 2016, 50, 1386. [Google Scholar] [CrossRef]
- Wallner, A.; Eriksson, A.; Manner, J. AutoPlant—Planteringsrobotens Potential i Svenskt Skogsbruk. Systemanalys. [AutoPlant—The Potential of the Planting Robot in Swedish Forestry. System Analysis]; 1158-2023; Skogforsk Arbetsrapport; Skogforsk: Uppsala, Sweden, 2023; p. 20. [Google Scholar]
- Krekula, B.; Bergqvist, J.; Fries, C.; Gällerspång, J.; Reisek, J.; Ringagård, J.; Sollander, E.; Svensson, L.; Wågström, K. Föreskrifter för Anläggning av Skog—Regeringsuppdrag; Skogforsk: Jönköping, Sweden, 2018; pp. 1–276. [Google Scholar]
- Jonsson, M.; Bengtsson, J.; Gamfeldt, L.; Moen, J.; Snäll, T. Levels of forest ecosystem services depend on specific mixtures of commercial tree species. Nat. Plants 2019, 5, 141–147. [Google Scholar] [CrossRef]
- Ersson, B.T. Concepts for Mechanized Tree Planting in Southern Sweden. Ph.D. Thesis, SLU, Swedish University of Agricultural Sciences, Umeå, Sweden, 2014. [Google Scholar]
- Luoranen, J.; Viiri, H. Deep planting decreases risk of drought damage and increases growth of Norway spruce container seedlings. New For. 2016, 47, 701–714. [Google Scholar] [CrossRef]
- Lawrence, A.; Spinelli, R.; Toppinen, A.M.K.; Salo, E. What are the Implications of the Bioeconomy for Forest-Related Jobs? Winkel, G., Ed.; Towards a Sustainable Bioeconomy: Assessment and the Way Forward. What Science Can Tell Us, No. 8; European Forest Institute: Joensuu, Finland, 2017. [Google Scholar]
- Taylor, S.E.; Veal, M.W.; Grift, T.E.; McDonald, T.P.; Corley, F.W. Precision Forestry: Operational Tactics for Today And Tomorrow. In Proceedings of the Forest Engineering Challenges—A Global Perspective, 25th Annual Meeting of Council of Forest Engineering (COFE), Auburn, AL, USA, 16–20 June 2002. [Google Scholar]
- Jones, D.; Snider, C.; Nassehi, A.; Yon, J.; Hicks, B. Characterising the Digital Twin: A systematic literature review. CIRP J. Manuf. Sci. Technol. 2020, 29, 36–52. [Google Scholar] [CrossRef]
- Felter, S.C.; Wu, N.E. A relative navigation system for formation flight. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 958–967. [Google Scholar] [CrossRef]
- Torens, C.; Nikodem, F.; Dauer, J.C.; Schirmer, S.; Dittrich, J.S. Geofencing requirements for onboard safe operation monitoring. CEAS Aeronaut. J. 2020, 11, 767–779. [Google Scholar] [CrossRef]
- Sundblad, L.-G.; Hannerz, M.; Manner, J.; Ersson, B.T. Flaskhalsen—Därför har Maskinell Plantering inte Lyft. [Examining the Bottlenecks Preventing Full-Scale Implementation of Tree Planting Machines in Swedish Forestry]; 1150-2023; Skogforsk Arbetsrapport; Skogforsk: Uppsala, Sweden, 2023; p. 23. [Google Scholar]
- Ersson, B.T.; Laine, T.; Saksa, T. Mechanized tree planting in Sweden and Finland: Current state and key factors for future growth. Forests 2018, 9, 370. [Google Scholar] [CrossRef]
- Ersson, B.T.; Sundblad, L.-G.; Manner, J. Cost analysis of seedling supply systems adapted for mechanized tree planting: A case study from southern Sweden. Silva Fenn. 2022, 56, 10663. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Path Planning | Crane Controller | ||
| NEXT_POS | Move to next staging area position | DOCK | Position for seedling transfer |
| Planting Planner | DOCK_WAYPOINT | Move to waypoint near docking | |
| PHOTO_WORKAREA | Take photo of new staging area | TRANSPORT | Move to transport position |
| ADD_OBSTACLES | Build obstacle map of staging area | POSITION_ABOVE_PLANT | Prepare to move to ground |
| GET_POSITION | Obtain suggested planting position | POSITION_ON_GROUND | Place unit on ground |
| SAVE_SUCCESS | Save last planting as fail | PHOTO_PLANT | Position above seedling |
| SAVE_FAIL_SCAR | Save last planting as scarification fail | Planter | |
| SAVE_FAIL_GROUND | Save last planting as ground contact fail | TRANSFER | Transfer seedling from tray |
| SAVE_FAIL_CRANE | Save last planting as crane fail | DROP | Place seedling in plant unit |
| Seedling Photo | PLANT | Scarify and plant | |
| TAKE_PHOTO | Take photo of the planted seedling | STOP | Emergency stop |
| Digging | Drilling | Scraping | |
|---|---|---|---|
| Weight | + | ++ | − |
| Hydraulic demand | ++ | + | + |
| Anchoring ability | + | ++ | −− |
| Quality of planting spot | + | ++ | − |
| Overall rating | +++++ | +++++++ | −−− |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hansson, L.J.; Sten, G.; Rossander, M.; Lideskog, H.; Manner, J.; van Westendorp, R.; Li, S.; Eriksson, A.; Wallner, A.; Rönnqvist, M.; et al. Autoplant—Autonomous Site Preparation and Tree Planting for a Sustainable Bioeconomy. Forests 2024, 15, 263. https://doi.org/10.3390/f15020263
Hansson LJ, Sten G, Rossander M, Lideskog H, Manner J, van Westendorp R, Li S, Eriksson A, Wallner A, Rönnqvist M, et al. Autoplant—Autonomous Site Preparation and Tree Planting for a Sustainable Bioeconomy. Forests. 2024; 15(2):263. https://doi.org/10.3390/f15020263
Chicago/Turabian StyleHansson, Linnea J., Gustav Sten, Morgan Rossander, Håkan Lideskog, Jussi Manner, Ruben van Westendorp, Songyu Li, Anders Eriksson, Anna Wallner, Mikael Rönnqvist, and et al. 2024. "Autoplant—Autonomous Site Preparation and Tree Planting for a Sustainable Bioeconomy" Forests 15, no. 2: 263. https://doi.org/10.3390/f15020263
APA StyleHansson, L. J., Sten, G., Rossander, M., Lideskog, H., Manner, J., van Westendorp, R., Li, S., Eriksson, A., Wallner, A., Rönnqvist, M., Flisberg, P., Edlund, B., Möller, B., & Karlberg, M. (2024). Autoplant—Autonomous Site Preparation and Tree Planting for a Sustainable Bioeconomy. Forests, 15(2), 263. https://doi.org/10.3390/f15020263