

General Position Subset Selection in Line Arrangements †

{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- Our results.
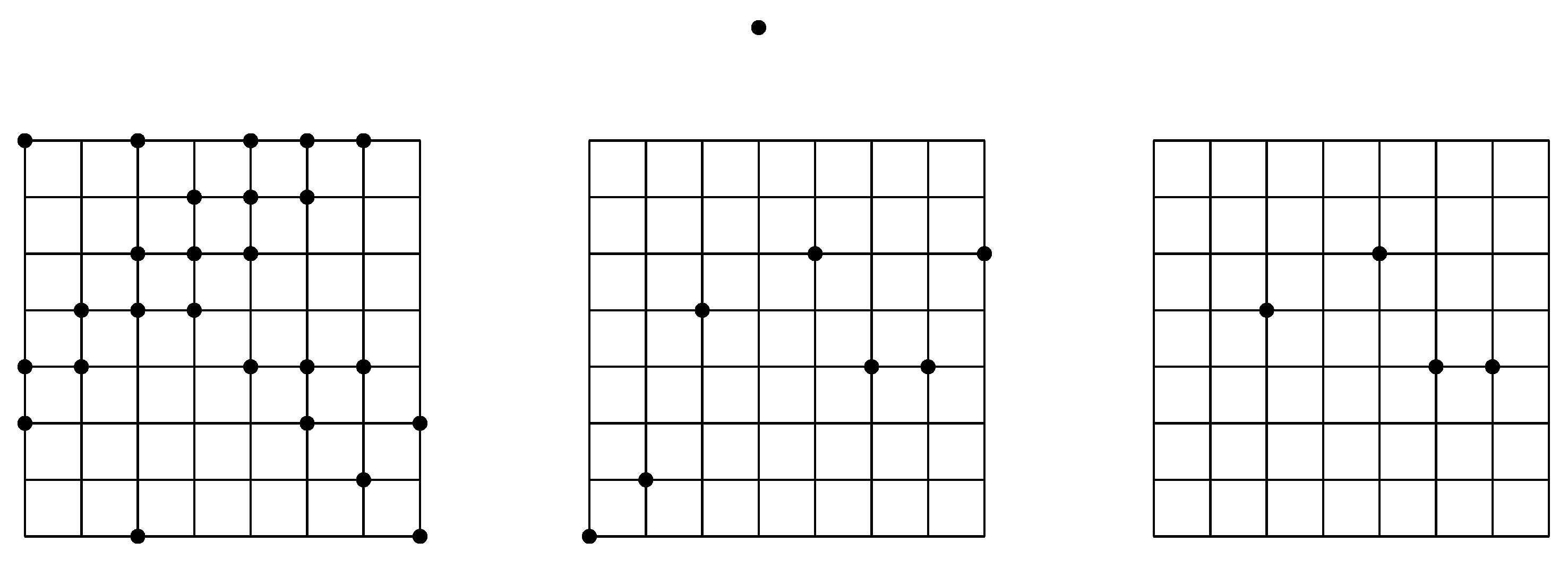
2. Subset Selection in Dense Lattice Point Sets
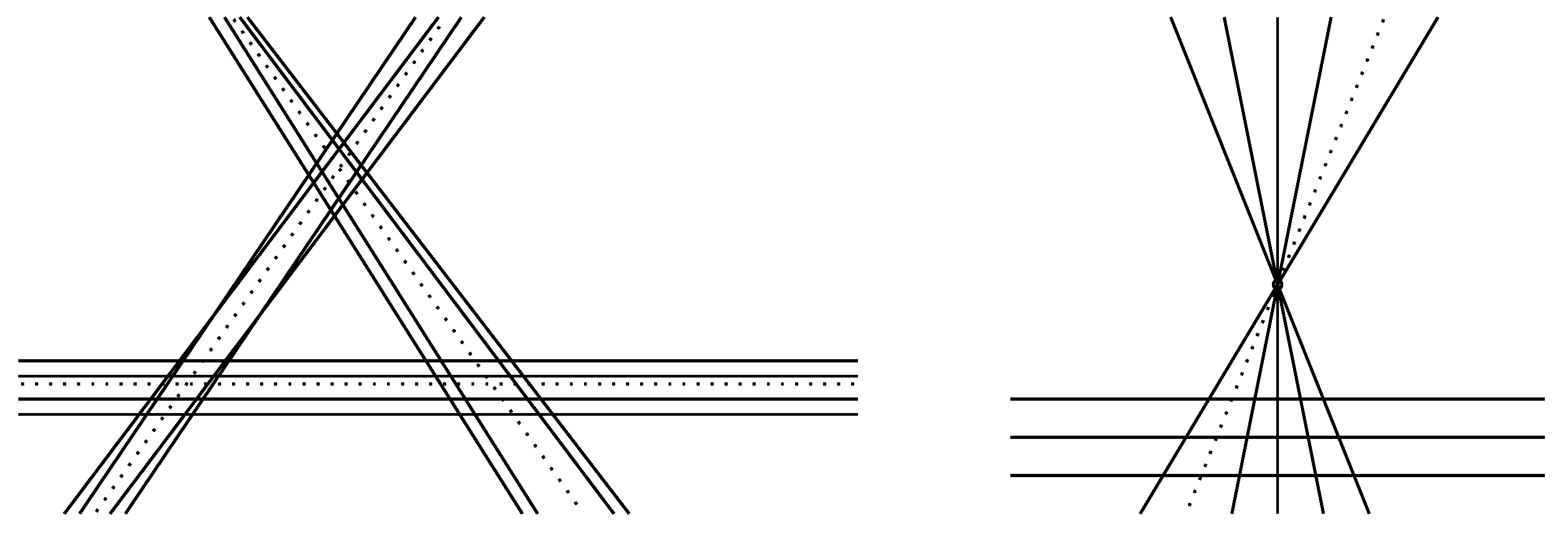
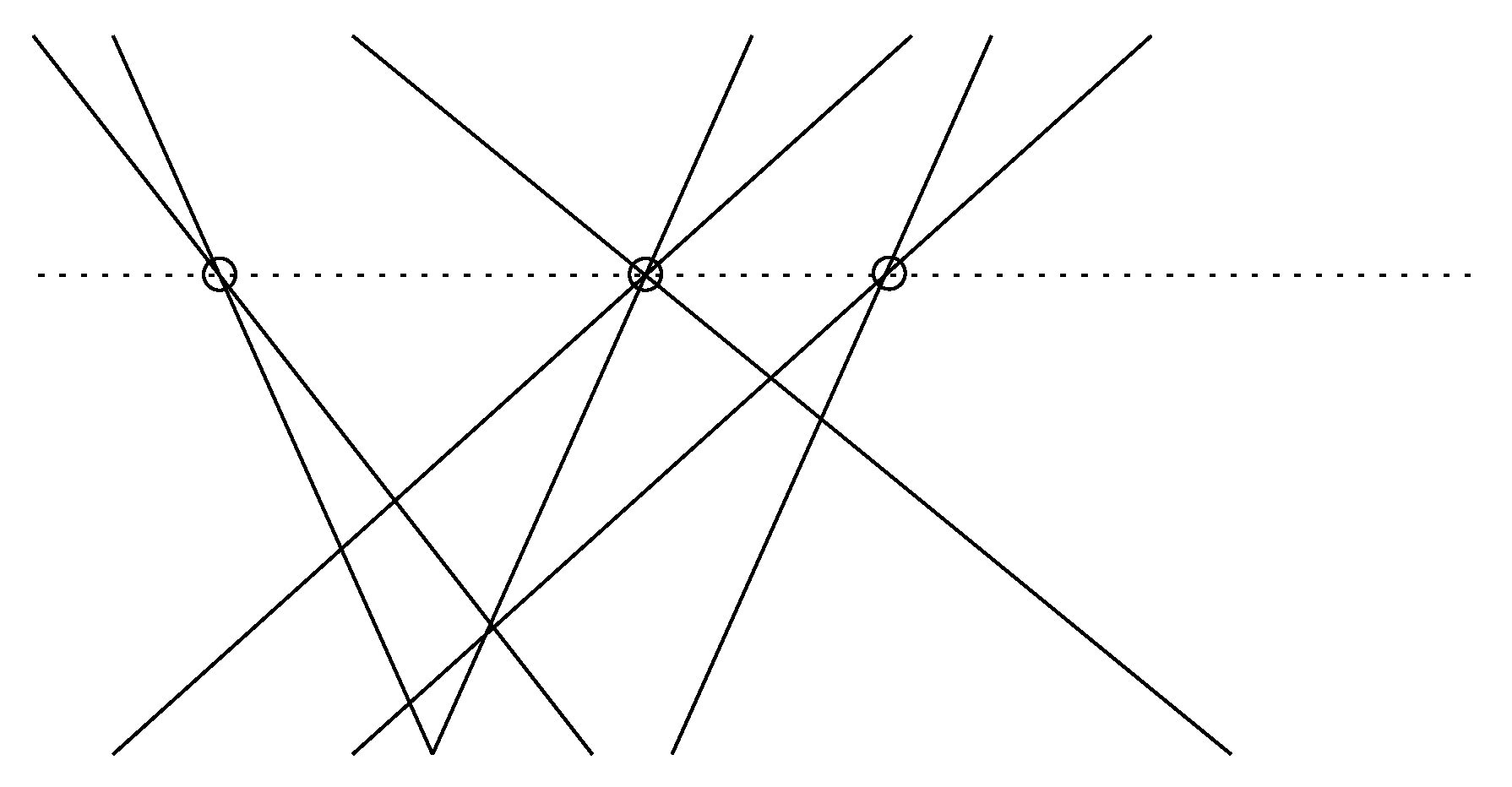
3. Subset Selection in Generic Line Arrangements
4. Another Application
5. Concluding Remarks
- Is there a constant-factor approximation for GPSS among the vertices of an n-line arrangement?
- Can better approximation factors for the general position subset selection problem be obtained in other interesting scenarios?
Funding
Data Availability Statement
Conflicts of Interest
References
- Dudeney, H. A puzzle with pawns. In Amusements in Mathematics; Nelson: Edinburgh, UK, 1917; p. 94. [Google Scholar]
- Braß, P.; Moser, W.; Pach, J. Research Problems in Discrete Geometry; Springer: New York, NY, USA, 2005. [Google Scholar]
- Payne, M.; Wood, D. On the general position subset selection problem. SIAM J. Discret. Math. 2013, 27, 1727–1733. [Google Scholar] [CrossRef]
- Szemerédi, E.; Trotter, W.T. Extremal problems in discrete geometry. Combinatorica 1983, 3, 381–392. [Google Scholar] [CrossRef]
- Pach, J.; Agarwal, P. Combinatorial Geometry; Wiley-Interscience: New York, NY, USA, 1995. [Google Scholar]
- Székely, L. Crossing numbers and hard Erdős problems in discrete geometry. Comb. Probab. Comput. 1997, 6, 353–358. [Google Scholar] [CrossRef]
- Lefmann, H. Distributions of points in the unit square and large k-gons. Eur. J. Comb. 2008, 29, 946–965. [Google Scholar] [CrossRef]
- Tao, T.; Vu, V. Additive Combinatorics; Cambridge Studies in Advanced Mathematics, 105; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Spencer, J. Turán’s theorem for k-graphs. Discret. Math. 1972, 2, 183–186. [Google Scholar] [CrossRef]
- Cao, C. Study on Two Optimization Problems: Line Cover and Maximum Genus Embedding. Master’s Thesis, Texas A&M University, Station, TX, USA, 2012. [Google Scholar]
- Eppstein, D. Forbidden Configurations in Discrete Geometry; Cambridge University Press: Cambridge, UK, 2018. [Google Scholar]
- Froese, V.; Kanj, I.; Nichterlein, A.; Niedermeier, R. Finding points in general position. Int. J. Comput. Geom. Appl. 2017, 27, 277–296. [Google Scholar] [CrossRef]
- Williamson, D.; Shmoys, D. The Design of Approximation Algorithms; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Valtr, P. Convex independent sets and 7-holes in restricted planar point sets. Discret. Comput. Geom. 1992, 7, 135–152. [Google Scholar] [CrossRef]
- Kovács, I.; Tóth, G. Dense point sets with many halving lines. Discret. Comput. Geom. 2020, 64, 965–984. [Google Scholar] [CrossRef]
- Beck, J. On the lattice property of the plane and some problems of Dirac, Motzkin and Erdős in combinatorial geometry. Combinatorica 1983, 3, 281–297. [Google Scholar] [CrossRef]
- Matoušek, J. Lectures on Discrete Geometry; Springer: New York, NY, USA, 2002. [Google Scholar]
- Dumitrescu, A.; Jiang, M. On the approximability of covering points by lines and related problems. Comput. Geom. Theory Appl. 2015, 48, 703–717. [Google Scholar] [CrossRef]
- Wood, D. A note on colouring the plane grid. Geombinatorics 2004, 13, 193–196. [Google Scholar]
- Nagura, J. On the interval containing at least one prime number. Proc. Jpn. Acad. 1952, 28, 177–181. [Google Scholar] [CrossRef]
- Erdos, P. Appendix, in Klaus F. Roth, On a problem of Heilbronn. J. Lond. Math. Soc. 1951, 1, 198–204. [Google Scholar]
- Agrawal, M.; Kayal, N.; Saxena, N. PRIMES is in P. Ann. Math. 2004, 160, 781–793. [Google Scholar] [CrossRef]
- Motwani, R.; Raghavan, P. Randomized Algorithms; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Baker, R.; Harman, G.; Pintz, J. The difference between consecutive primes, II. Proc. Lond. Math. Soc. 2001, 83, 532–562. [Google Scholar] [CrossRef]
- Alon, N.; Spencer, J. The Probabilistic Method, 4th ed.; Wiley: New York, NY, USA, 2016. [Google Scholar]
- Zhang, Z. A note on arrays of dots with distinct slopes. Combinatorica 1993, 13, 127–128. [Google Scholar] [CrossRef]
- de Berg, M.; Cheong, O.; van Kreveld, M.; Overmars, M. Computational Geometry: Algorithms and Applications, 3rd ed.; Springer: New York, NY, USA, 2008. [Google Scholar]
- Balogh, J.; Clemen, F.C.; Dumitrescu, A.; Liu, D. Subset selection problems in planar point sets. arXiv 2024, arXiv:2412.14287. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dumitrescu, A. General Position Subset Selection in Line Arrangements. Algorithms 2025, 18, 315. https://doi.org/10.3390/a18060315
Dumitrescu A. General Position Subset Selection in Line Arrangements. Algorithms. 2025; 18(6):315. https://doi.org/10.3390/a18060315
Chicago/Turabian StyleDumitrescu, Adrian. 2025. "General Position Subset Selection in Line Arrangements" Algorithms 18, no. 6: 315. https://doi.org/10.3390/a18060315
APA StyleDumitrescu, A. (2025). General Position Subset Selection in Line Arrangements. Algorithms, 18(6), 315. https://doi.org/10.3390/a18060315